EECS490: Digital Image Processing. Lecture #21
|
|
|
- Bridget Wood
- 5 years ago
- Views:
Transcription

1 Lecture #21 Hough transform Graph searching Area based segmentation Thresholding, automatic thresholding Local thresholding Region segmentation
 Define a line y=ax+b in x-y")
 there is a")


2 Hough Transform Points (x i,y i ) and (x j,y j ) Define a line y=ax+b in x-y space Rearrange equation as b=-ax+y For every point (x i,y i ) there is a corresponding line describing all the possible slopes and y- intercepts. Their intersection is the original line in x-y space R. C. Gonzalez & R. E. Woods
3 Hough Transform
4 Hough Transform 1. Quantize parameter space between appropriate maxima and minima for y-intercept b and slope a 2. Form an accumulator array A[b,a]:=0 3. For each point (x,y) in an edge-enhanced image such that E(x,y)>T, increment all points in A[b,a] along the appropriate line in a-b space, i.e., A[b,a]:=A[b,a]+1 for b=-ax+y 4. Local maxima in A[b,a] space correspond to collinear points (i.e., lines) in the image array. Values in A[b,a] correspond to how many points exist on that line.
5 Hough Transform Problem: a-b space is unbounded as for near-vertical lines a->± Solution: convert to polar coordinates before transforming r = x cos + ysin This will give sinusoids instead of straight lines
 and (x j,y j ) define a line in")

6 Hough Transform The possible lines are sinusoids in - space Points (x i,y i ) and (x j,y j ) define a line in polar coordinates Map possible sinusoids into accumulator cells in discrete - space 2002 R. C. Gonzalez & R. E. Woods

7 Chapter 10 Image Segmentation Map possible sinusoids into accumulator cells in discrete - space



8 Hough Transform Line Line R. C. Gonzalez & R. E. Woods


9 Hough Transform Maximum accumulator values corresponding to long vertical lines R. C. Gonzalez & R. E. Woods


10 Hough Transform Linked pixels from strongest points in accumulator. No gaps in linked image R. C. Gonzalez & R. E. Woods
11 MATLAB/Image Processing Toolbox MATLAB s Hough Transform routine Function [h, theta, rho] = hough (f, dtheta, dpho) % HOUGH Hough transform % [H, THETA, RHO] =HOUGH(F, DTHETA, DRHO) computes the Hough transform of the image F. % DTHETA specifies the spacing [in degrees] of the Hough transform bins along the theta axis. % DRHO specifies the spacing of the Hough transform bins along the rho axis. % H is the Hough transform matrix. It is NRHO-by-NTHETA where NRHO=2*ceil(norm(size(F))/DRHO-1 and % NTHETA=2*ceil(90/DTHETA). If 90/DTHETA is not an integer, the actual angle will be 90/ceil(90/DTHETA). % THETA is an NTHETA-element vector containing the angle (in degrees) corresponding to each column of H % RHO is an NRHO-element vector containing the value of rho corresponding to each row of H. % [H, THETA, RHO] =HOUGH(F) computes the Hough transform using DTHETA=1 and DRHO=1 >>f=zeros(101,101); >>f(1,1)=1; f(101,1)=1; f(1,101)=1; f(101,101)=1; f(51,51)=1; >>H=hough(f); >>imshow(h,[ ]) SEE GWE, Section 10.2 Line Detection Using the Hough Transform

12 MATLAB/Image Processing Toolbox MATLAB s Hough Peaks routine PEAKS = HOUGHPEAKS(H,NUMPEAKS) locates peaks in the Hough transform matrix, H, generated by the HOUGH function. NUMPEAKS specifies the maximum number of peaks to identify. PEAKS is a Q-by-2 matrix, where Q can range from 0 to NUMPEAKS. Q holds the row and column coordinates of the peaks. If NUMPEAKS is omitted, it defaults to 1. PEAKS = HOUGHPEAKS(...,PARAM1,VAL1,PARAM2,VAL2) sets various parameters. Parameter names can be abbreviated, and case does not matter. Each string parameter is followed by a value as indicated below: 'Threshold' Nonnegative scalar. Values of H below 'Threshold' will not be considered to be peaks. Threshold can vary from 0 to Inf. Default: 0.5*max(H(:)) 'NHoodSize' Two-element vector of positive odd integers: [M N]. 'NHoodSize' specifies the size of the suppression neighborhood. This is the neighborhood around each peak that is set to zero after the peak is identified. Because peaks are not necessarily confined to one cell you want to suppress (set to 0) the Hough transform cells in the immediate neighborhood. Default: smallest odd values greater than or equal to size(h)/50. SEE GWE, Section 10.2 Line Detection Using the Hough Transform
13 MATLAB/Image Processing Toolbox MATLAB s Hough lines routine Function lines = houghlines (f,theta, rho, rr, cc, fillgap, minlength) % HOUGHLINES Extract line segments based on the Hough transform % LINES =HOUGHLINES(F, THETA, RHO, RR, CC, FILLGAP, MINLENGTH) % Extracts line segments in the image f associated with particular bins in a Hough transform. % THETA and RHO are vectors returned by the function HOUGH. % Vectors RR and CC specify the rows and columns of the Hough transform bins to use % in searching for line segments. If HOUGHLINES finds two lines segments that are associated % with the same Hough transform bin that are separated by less than FILLGAP pixels, % HOUGHLINES merges them into a single line segment. FILLGAP defaults to 20 if omitted. % Merged line segments less than MINLENGTH pixels long are discarded. % MINLENGTH defaults to 40 if omitted. >> f=imread( fig10.10(a).jpg ); %load in building figure >>[H, theta, rho]=hough(f,0.5); % Hough transform with finer angular spacing >>imshow(theta, rho, H, [ ], nottruesize ), axis on, axis normal >>xlabel( \theta ), ylabel( \rho ) >>P=houghpeaks[H,5]; %find five Hough transform peaks >>hold on >>plot(theta(p(:,2),rho(p(:,1)), 's','color','red') >>lines=houghlines(f,theta,rho,r,c) >>figure, imshow(f), hold on >>for k=1:length(lines) Xy=[lines(k), point1; lines(k),point2]; Plot(xy:2),xy(:1), LineWidth,4, Color,[.6.6.6]); end SEE GWE, Section 10.2 Line Detection Using the Hough Transform
; imshow(f) figure BW=edge(f,'canny',[0.04 0.")
![1],4); imshow(bw) [H,theta,rho] = hough(bw); figure](/docs-images/82/86031695/images/14-3.jpg)


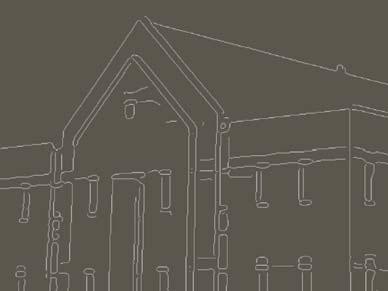
14 MATLAB/Image Processing Toolbox f=imread('fig1016(a).tif'); imshow(f) figure BW=edge(f,'canny',[ ],4); imshow(bw) [H,theta,rho] = hough(bw); figure imshow(h,[],'xdata',theta,'ydata',rho,'initialmagnification','fit'); xlabel(' theta'), ylabel(' rho'); axis on, axis normal, hold on; P = houghpeaks(h,5); x = theta(p(:,2)); y = rho(p(:,1)); plot(x,y,'s','color','green'); % Find lines and plot them lines = houghlines(bw,theta,rho,p,'fillgap',30,'minlength',40); SEE GWE, Section 10.2 Line Detection Using the Hough Transform Using the same parameters as listed in GW [Example 10.8] produced a much poorer edge image than that shown in Figure 10.25
15 Hough Transform The Hough Transform can be applied to any curve of the form f(x,a)=0 where x is the position vector; a is the parameter vector For example, (x-a) 2 +(y-b) 2 =r 2 is a three-parameter space (a,b,r) This approach is impractical for too many parameters. Effectively, it is a matched filtering process. Consider looking for a circle of 1 s (edge only) A(a,b,r) is the correlation with that circle template where (a,b) is the possible center and r are the possible radii SPECIAL TECHNIQUES are needed to find the end points of a line segment
16 Hough Transform The Hough Transform is typically slow and uses a lot of memory so we use gradient direction to reduce computations


 incremented in")



17 Hough Transform Example: find a circle of fixed radius r y All possible circles of radius r going through the edge point Image space The edge point Locus of all possible centers (a,b). These would be the (a,b) incremented in Hough space b Arc #1 x Locus of possible a,b s in Hough space Parameter space Arc #2 Would only need to accumulate some a,b s if we knew additional information such as the local gradient in image space. This would localize the regions to accumulate in Hough space. a



18 Hough Transform Original chest X-ray Hough accumulator array Identified circular tumors Ballard & Brown
19 Hough Transform Consider equation of circle Differentiating 2( x a)dx 2( y b)dy = 0 dy dx = x a y b ( x a) 2 ( y b) 2 = R 2 Define the gradient of the edge in image space as dy dx = tan Now solve for a and b in terms of x,y,r and
20 Hough Transform Substituting dy dx y b ( ) 2 ( y b) 2 = R 2 ( y b) 2 dy dx = R 2 ( y b) 2 tan = R 2 = y b ( y b) 2 = R 2 cos 2 y b =±Rcos b = y Rcos ( ) 2 1 cos 2
21 Hough Transform Do the same for b ( x a) 2 x a dy = R 2 2 dx ( x a) dy = R 2 dx ( x a) cot 2 2 = R 2 = x a ( x a) 2 = R 2 sin 2 x a =±Rsin a = x Rsin 2 ( ) 2 1 sin 2
 This gives a single point in (a,b) space.")
22 Hough Transform Use the results where R is known in this example and comes from known gradient. (x,y) is location of edge candidate. Then, a = x Rsin b = y Rcos Remember =Tan -1 (dy/dx) This gives a single point in (a,b) space. Do an arc through (a,b) to cover errors in due to quantization, noise, etc.
23 Generalized Hough Transform 1. Construct an R-table (next slide) for the shape to be localized 2. Initialize accumulator array A(x cmin,x cmax,y cmin :y cmax ) for all possible reference points. 3. For each edge point a) Compute (x), direction of gradient b) Calculate all possible centers x c :=x+r( )cos( ( )); y c :=y+r( )sin( ( )) a) Increment the accumulator array A(x c,y c ):= A(x c,y c )+1 4. Possible locations for shape are local maxima of A (Can handle scale S and rotation by increasing dimensionality of accumulator)
24 Generalized Hough Transform Basic premise of Hough Edge point data in image space corresponds to loci of possible points in parameter space R-table Gradient angle Location of reference points from boundary points 1 r 1, r 2, r 3,, r n or r=(r, ) 2 m Basically the possible center is specified by r and for each identified edge point (and gradient direction)

=h-[f(p)-f(q)] H is the")
 and f(q) are gray scale")
=h-[f(p)-f(q)]=7-[7-0]=0 Cost is")

25 Graph Search These correspond to the center of the pixels 7 0 Each edge element has a cost for the edge Goal nodes c(p,q)=h-[f(p)-f(q)] H is the highest gray scale value in the edge image, f(p) and f(q) are gray scale edge values Let f(p)=7, f(q)=0, H=7 c(p,q)=h-[f(p)-f(q)]=7-[7-0]=0 Cost is low (high edge gradient) traveling along this edge from top to bottom NOTE: the cost function has direction
26 Graph Search Edge image with computed gradient values Edge segments and all computed costs Pick lowest starting cost and traverse lowest cost path to bottom


27 Graph Search Graph of all nodes from previous figure shows all possible paths. Nodes correspond to edge pixels in figure. Arcs are potential linked edges. (3,2)(3,3) specify p and q respectively for each edge Shaded pixels are end nodes

")
 estimated cost from n to goal")

28 Graph Search Improved algorithm will estimate the cost to the ends as well. r( n)= gn ( )+ hn ( ) r(n) is the estimate of the minimum cost path g(n) is the cost of the lowest cost path to n h(n) estimated cost from n to goal node using some heuristic Heuristic used here to to pick lowest cost edge 5 levels down.
29 Image Thresholding Thresholding is a very important technique for segmenting images. It can be applied to intensity, color components, etc.


30 Image Thresholding Image segmentation can be done by classifying pixels which are connected and have similar characteristics, e.g., gray scale distribution R. C. Gonzalez & R. E. Woods

31 Image Thresholding Where should the threshold be placed? Basic two gray level image which can be readily separated by a single threshold Same image with additive Gaussian noise mean=0, =10 Same image with additive Gaussian noise mean=0, = R. C. Gonzalez & R. E. Woods
 with")
 Viewed image which is product")

32 Image Thresholding Papoulis: resultant pdf will be convolution of pdf s for iid rv s Image r(x,y) with additive Gaussian noise mean=0, =10 Illumination function i(x,y) Viewed image which is product f(x,y)=r(x,y)i(x,y) If you know i(x,y) as in some industrial applications you can recover r(x,y)=f(x,y)/i(x,y) 2002 R. C. Gonzalez & R. E. Woods


33 Image Thresholding Simple example of global (single common) threshold.


 5.")
34 Image Thresholding Works well for histograms (pdf s) with clear valleys between the classes. Automated threshold calculation: 1. Select an initial estimate for threshold T 2. Segment the image, i.e., threshold 3. Compute the average gray scale value 1 for pixels that are classified as 0 s. Compute the average gray scale value 2 for pixels classified as 1 s. 4. Compute new threshold T=0.5*( ) 5. Repeat until T less than some threshold 2002 R. C. Gonzalez & R. E. Woods


35 Optimum Thresholding probability 1 T 2 intensity Simple bimodal distribution with two homogeneous classes probability Class 1 1 T 2 Class 2 intensity If there is no valley one method of determining T is to minimize the variance within both classes R. C. Gonzalez & R. E. Woods by Richard Alan Peters II
= t q 1 () t 2 1 ()+ t q 2 () t 2 2 () t Class 1 Class 2 q 1 q 2 () ()= t Pi t i=0 L 1 () ()= t Pi i=t CDF for each class 1 2 2")

36 Image Thresholding Otsu method minimizes the overall within-class variance by minimizing the weighted sum of class variances w 2 ()= t q 1 () t 2 1 ()+ t q 2 () t 2 2 () t Class 1 Class 2 q 1 q 2 () ()= t Pi t i=0 L 1 () ()= t Pi i=t CDF for each class ()= t 1 t q 1 () ()= t 1 t q 2 () t i=0 L 1 i=t +1 i μ 1 i μ 2 () t 2 Pi () () t 2 Pi () Standard deviation of the intensities within each class normalized by the probability of that class 2002 R. C. Gonzalez & R. E. Woods by Richard Alan Peters II
 for k=0,,l-1 P 1 ( k)= p i 3. Compute the cumulative mean m(k) for k=0,,l-1 4. Compute the global intensity mean m G 5.")
 2002 R. C. Gonzalez & R. E.")
37 Image Thresholding 1. Compute the histogram of the image. Let each gray level have probability p i. k 2. Compute the cumulative sum P 1 (k) for k=0,,l-1 P 1 ( k)= p i 3. Compute the cumulative mean m(k) for k=0,,l-1 4. Compute the global intensity mean m G 5. Compute the between class variance B2 (k) for k=0,,l 2 B = P 1 ( m 1 m G ) 2 + P 2 ( m 2 m G ) 2 6. Compute the Otsu threshold k* as the value of k for which B2 (k) is maximum 7. Obtain the separability measure * * = 2 B ( k *) 2002 R. C. Gonzalez & R. E. Woods by Richard Alan Peters II m G = G 2 L 1 i=0 ip i m 1 ( k)= i=0 P 1 1 k ( ) k i=0 ip i The farther apart the means the larger will be B2 (k) This is a measure of how easily separable the classes are. Uniform distribution is 0 and a clear, bimodal is 1





38 Image Thresholding Original image. Global thresholding calculating T=0.5*( ) until T less than some Global thresholding using Otsu algorithm 2002 R. C. Gonzalez & R. E. Woods


39 Image Thresholding Noisy image Smoothed noisy image Averaging greatly improves separability Global thresholding using Otsu algorithm 2002 R. C. Gonzalez & R. E. Woods


40 Image Thresholding Noisy image Smoothed noisy image Averaging does not improve separability Global thresholding using Otsu algorithm 2002 R. C. Gonzalez & R. E. Woods



 Produce of")





41 Image Thresholding Basic idea is to look at the histogram of pixels only near edges Noisy image Thresholded gradient image (very high threshold) Produce of thresholded gradient image and original image Edge masking uses only pixels near edges to form histogram Global thresholding of ORIGINAL image using Otsu algorithm on histogram of masked image 2002 R. C. Gonzalez & R. E. Woods






42 Image Thresholding Noisy image of yeast cells want to find bright spots Thresholded absolute Laplacian image (high threshold) Product of thresholded gradient image and original image Global thresholding of ORIGINAL image using Otsu algorithm on histogram of masked image Edge masking uses only pixels near edges to form histogram 2002 R. C. Gonzalez & R. E. Woods
EECS490: Digital Image Processing. Lecture #22
 Lecture #22 Gold Standard project images Otsu thresholding Local thresholding Region segmentation Watershed segmentation Frequency-domain techniques Project Images 1 Project Images 2 Project Images 3 Project
Lecture #22 Gold Standard project images Otsu thresholding Local thresholding Region segmentation Watershed segmentation Frequency-domain techniques Project Images 1 Project Images 2 Project Images 3 Project
EECS490: Digital Image Processing. Lecture #20
 Lecture #20 Edge operators: LoG, DoG, Canny Edge linking Polygonal line fitting, polygon boundaries Edge relaxation Hough transform Image Segmentation Thresholded gradient image w/o smoothing Thresholded
Lecture #20 Edge operators: LoG, DoG, Canny Edge linking Polygonal line fitting, polygon boundaries Edge relaxation Hough transform Image Segmentation Thresholded gradient image w/o smoothing Thresholded
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
Computer Vision. Image Segmentation. 10. Segmentation. Computer Engineering, Sejong University. Dongil Han
 Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They can be performed sequentially or simultaneou
 Model tting They can be performed sequentially or simultaneou") an edge image, nd line or curve segments present Given the image. in Line and Curves Detection 1 Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They
an edge image, nd line or curve segments present Given the image. in Line and Curves Detection 1 Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Segmentation I: Edges and Lines
 Segmentation I: Edges and Lines Prof. Eric Miller elmiller@ece.tufts.edu Fall 2007 EN 74-ECE Image Processing Lecture 8-1 Segmentation Problem of breaking an image up into regions are are interesting as
Segmentation I: Edges and Lines Prof. Eric Miller elmiller@ece.tufts.edu Fall 2007 EN 74-ECE Image Processing Lecture 8-1 Segmentation Problem of breaking an image up into regions are are interesting as
Introduction to Medical Image Analysis Exercise 11 - Line and Path Tracing
 Introduction to Medical Image Analysis Exercise 11 - Line and Path Tracing Spring 2018 Introduction The topic of this exercise is line and path tracing in images. In the first part, the goal is to identify
Introduction to Medical Image Analysis Exercise 11 - Line and Path Tracing Spring 2018 Introduction The topic of this exercise is line and path tracing in images. In the first part, the goal is to identify
Edge linking. Two types of approaches. This process needs to be able to bridge gaps in detected edges due to the reason mentioned above
 Edge linking Edge detection rarely finds the entire set of edges in an image. Normally there are breaks due to noise, non-uniform illumination, etc. If we want to obtain region boundaries (for segmentation)
Edge linking Edge detection rarely finds the entire set of edges in an image. Normally there are breaks due to noise, non-uniform illumination, etc. If we want to obtain region boundaries (for segmentation)
Segmentation
 Lecture 6: Segmentation 215-13-11 Filip Malmberg Centre for Image Analysis Uppsala University 2 Today What is image segmentation? A smörgåsbord of methods for image segmentation: Thresholding Edge-based
Lecture 6: Segmentation 215-13-11 Filip Malmberg Centre for Image Analysis Uppsala University 2 Today What is image segmentation? A smörgåsbord of methods for image segmentation: Thresholding Edge-based
Segmentation
 Lecture 6: Segmentation 24--4 Robin Strand Centre for Image Analysis Dept. of IT Uppsala University Today What is image segmentation? A smörgåsbord of methods for image segmentation: Thresholding Edge-based
Lecture 6: Segmentation 24--4 Robin Strand Centre for Image Analysis Dept. of IT Uppsala University Today What is image segmentation? A smörgåsbord of methods for image segmentation: Thresholding Edge-based
HOUGH TRANSFORM. Plan for today. Introduction to HT. An image with linear structures. INF 4300 Digital Image Analysis
 INF 4300 Digital Image Analysis HOUGH TRANSFORM Fritz Albregtsen 14.09.2011 Plan for today This lecture goes more in detail than G&W 10.2! Introduction to Hough transform Using gradient information to
INF 4300 Digital Image Analysis HOUGH TRANSFORM Fritz Albregtsen 14.09.2011 Plan for today This lecture goes more in detail than G&W 10.2! Introduction to Hough transform Using gradient information to
Edge Detection. EE/CSE 576 Linda Shapiro
 Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
Straight Lines and Hough
 09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Biomedical Image Analysis. Point, Edge and Line Detection
 Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Schedule for Rest of Semester
 Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration
Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Chapter 10: Image Segmentation. Office room : 841
 Chapter 10: Image Segmentation Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cn Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Contents Definition and methods classification
Chapter 10: Image Segmentation Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cn Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Contents Definition and methods classification
A New Approach for Feature Extraction of an Image
 A New Approach for Feature Extraction of an Image Mamta.Juneja and Parvinder S. Sandhu Abstract This paper presents a new approach for feature (lines, edges, shapes) extraction of a given image. The Proposed
A New Approach for Feature Extraction of an Image Mamta.Juneja and Parvinder S. Sandhu Abstract This paper presents a new approach for feature (lines, edges, shapes) extraction of a given image. The Proposed
Lecture #5. Point transformations (cont.) Histogram transformations. Intro to neighborhoods and spatial filtering
 Histogram transformations. Intro to neighborhoods and spatial filtering") Lecture #5 Point transformations (cont.) Histogram transformations Equalization Specification Local vs. global operations Intro to neighborhoods and spatial filtering Brightness & Contrast 2002 R. C. Gonzalez
Lecture #5 Point transformations (cont.) Histogram transformations Equalization Specification Local vs. global operations Intro to neighborhoods and spatial filtering Brightness & Contrast 2002 R. C. Gonzalez
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
CS 490: Computer Vision Image Segmentation: Thresholding. Fall 2015 Dr. Michael J. Reale
 CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
E0005E - Industrial Image Analysis
 E0005E - Industrial Image Analysis The Hough Transform Matthew Thurley slides by Johan Carlson 1 This Lecture The Hough transform Detection of lines Detection of other shapes (the generalized Hough transform)
E0005E - Industrial Image Analysis The Hough Transform Matthew Thurley slides by Johan Carlson 1 This Lecture The Hough transform Detection of lines Detection of other shapes (the generalized Hough transform)
Lecture 15: Segmentation (Edge Based, Hough Transform)
") Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Edge Detection. Announcements. Edge detection. Origin of Edges. Mailing list: you should have received messages
 Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Pattern recognition systems Lab 3 Hough Transform for line detection
 Pattern recognition systems Lab 3 Hough Transform for line detection 1. Objectives The main objective of this laboratory session is to implement the Hough Transform for line detection from edge images.
Pattern recognition systems Lab 3 Hough Transform for line detection 1. Objectives The main objective of this laboratory session is to implement the Hough Transform for line detection from edge images.
(Refer Slide Time: 0:32)
") Digital Image Processing. Professor P. K. Biswas. Department of Electronics and Electrical Communication Engineering. Indian Institute of Technology, Kharagpur. Lecture-57. Image Segmentation: Global Processing
Digital Image Processing. Professor P. K. Biswas. Department of Electronics and Electrical Communication Engineering. Indian Institute of Technology, Kharagpur. Lecture-57. Image Segmentation: Global Processing
Edges and Lines Readings: Chapter 10: better edge detectors line finding circle finding
 Edges and Lines Readings: Chapter 10: 10.2.3-10.3 better edge detectors line finding circle finding 1 Lines and Arcs Segmentation In some image sets, lines, curves, and circular arcs are more useful than
Edges and Lines Readings: Chapter 10: 10.2.3-10.3 better edge detectors line finding circle finding 1 Lines and Arcs Segmentation In some image sets, lines, curves, and circular arcs are more useful than
Massachusetts Institute of Technology. Department of Computer Science and Electrical Engineering /6.866 Machine Vision Quiz I
 Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision Quiz I Handed out: 2004 Oct. 21st Due on: 2003 Oct. 28th Problem 1: Uniform reflecting
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision Quiz I Handed out: 2004 Oct. 21st Due on: 2003 Oct. 28th Problem 1: Uniform reflecting
Image Analysis Image Segmentation (Basic Methods)
") Image Analysis Image Segmentation (Basic Methods) Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Computer Vision course
Image Analysis Image Segmentation (Basic Methods) Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Computer Vision course
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Histograms. h(r k ) = n k. p(r k )= n k /NM. Histogram: number of times intensity level rk appears in the image
 = n k. p(r k )= n k /NM. Histogram: number of times intensity level rk appears in the image") Histograms h(r k ) = n k Histogram: number of times intensity level rk appears in the image p(r k )= n k /NM normalized histogram also a probability of occurence 1 Histogram of Image Intensities Create
Histograms h(r k ) = n k Histogram: number of times intensity level rk appears in the image p(r k )= n k /NM normalized histogram also a probability of occurence 1 Histogram of Image Intensities Create
Lecture 8: Fitting. Tuesday, Sept 25
 Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
GENERALIZING THE HOUGH TRANSFORM TO DETECT ARBITRARY SHAPES. D. H. Ballard Pattern Recognition Vol. 13 No
 GENERALIZING THE HOUGH TRANSFORM TO DETECT ARBITRARY SHAPES D. H. Ballard Pattern Recognition Vol. 13 No. 2 1981 What is the generalized Hough (Huff) transform used for? Hough transform is a way of encoding
GENERALIZING THE HOUGH TRANSFORM TO DETECT ARBITRARY SHAPES D. H. Ballard Pattern Recognition Vol. 13 No. 2 1981 What is the generalized Hough (Huff) transform used for? Hough transform is a way of encoding
Edge detection. Gradient-based edge operators
 Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EN1610 Image Understanding Lab # 3: Edges
 EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Image Processing. Bilkent University. CS554 Computer Vision Pinar Duygulu
 Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
Chapter 11 Arc Extraction and Segmentation
 Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 14 Edge detection What will we learn? What is edge detection and why is it so important to computer vision? What are the main edge detection techniques
Practical Image and Video Processing Using MATLAB Chapter 14 Edge detection What will we learn? What is edge detection and why is it so important to computer vision? What are the main edge detection techniques
Contents Edge Linking and Boundary Detection
 Contents Edge Linking and Boundar Detection 3 Edge Linking z Local processing link all points in a local neighbourhood (33, 55, etc.) that are considered to be similar similar response strength of a gradient
Contents Edge Linking and Boundar Detection 3 Edge Linking z Local processing link all points in a local neighbourhood (33, 55, etc.) that are considered to be similar similar response strength of a gradient
Model Fitting. Introduction to Computer Vision CSE 152 Lecture 11
 Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
Announcements. Edges. Last Lecture. Gradients: Numerical Derivatives f(x) Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10
 Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10") Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Edges and Lines Readings: Chapter 10: better edge detectors line finding circle finding
 Edges and Lines Readings: Chapter 10: 10.2.3-10.3 better edge detectors line finding circle finding 1 Lines and Arcs Segmentation In some image sets, lines, curves, and circular arcs are more useful than
Edges and Lines Readings: Chapter 10: 10.2.3-10.3 better edge detectors line finding circle finding 1 Lines and Arcs Segmentation In some image sets, lines, curves, and circular arcs are more useful than
BIM472 Image Processing Image Segmentation
 BIM472 Image Processing Image Segmentation Outline Fundamentals Prewitt filter Roberts cross-gradient filter Sobel filter Laplacian of Gaussian filter Line Detection Hough Transform 2 1 Fundamentals Let
BIM472 Image Processing Image Segmentation Outline Fundamentals Prewitt filter Roberts cross-gradient filter Sobel filter Laplacian of Gaussian filter Line Detection Hough Transform 2 1 Fundamentals Let
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Image Processing. Application area chosen because it has very good parallelism and interesting output.
 Chapter 11 Slide 517 Image Processing Application area chosen because it has very good parallelism and interesting output. Low-level Image Processing Operates directly on stored image to improve/enhance
Chapter 11 Slide 517 Image Processing Application area chosen because it has very good parallelism and interesting output. Low-level Image Processing Operates directly on stored image to improve/enhance
Chapter 11 Image Processing
 Chapter Image Processing Low-level Image Processing Operates directly on a stored image to improve or enhance it. Stored image consists of a two-dimensional array of pixels (picture elements): Origin (0,
Chapter Image Processing Low-level Image Processing Operates directly on a stored image to improve or enhance it. Stored image consists of a two-dimensional array of pixels (picture elements): Origin (0,
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Laboratory of Applied Robotics
 Laboratory of Applied Robotics OpenCV: Shape Detection Paolo Bevilacqua RGB (Red-Green-Blue): Color Spaces RGB and HSV Color defined in relation to primary colors Correlated channels, information on both
Laboratory of Applied Robotics OpenCV: Shape Detection Paolo Bevilacqua RGB (Red-Green-Blue): Color Spaces RGB and HSV Color defined in relation to primary colors Correlated channels, information on both
Example 2: Straight Lines. Image Segmentation. Example 3: Lines and Circular Arcs. Example 1: Regions
 Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example : Straight Lines. into
Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example : Straight Lines. into
REGION & EDGE BASED SEGMENTATION
 INF 4300 Digital Image Analysis REGION & EDGE BASED SEGMENTATION Today We go through sections 10.1, 10.2.7 (briefly), 10.4, 10.5, 10.6.1 We cover the following segmentation approaches: 1. Edge-based segmentation
INF 4300 Digital Image Analysis REGION & EDGE BASED SEGMENTATION Today We go through sections 10.1, 10.2.7 (briefly), 10.4, 10.5, 10.6.1 We cover the following segmentation approaches: 1. Edge-based segmentation
Point Operations and Spatial Filtering
 Point Operations and Spatial Filtering Ranga Rodrigo November 3, 20 /02 Point Operations Histogram Processing 2 Spatial Filtering Smoothing Spatial Filters Sharpening Spatial Filters 3 Edge Detection Line
Point Operations and Spatial Filtering Ranga Rodrigo November 3, 20 /02 Point Operations Histogram Processing 2 Spatial Filtering Smoothing Spatial Filters Sharpening Spatial Filters 3 Edge Detection Line
Example 1: Regions. Image Segmentation. Example 3: Lines and Circular Arcs. Example 2: Straight Lines. Region Segmentation: Segmentation Criteria
 Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example 1: Regions. into linear
Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example 1: Regions. into linear
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
Image Enhancement: To improve the quality of images
 Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Generalized Hough Transform, line fitting
 Generalized Hough Transform, line fitting Introduction to Computer Vision CSE 152 Lecture 11-a Announcements Assignment 2: Due today Midterm: Thursday, May 10 in class Non-maximum suppression For every
Generalized Hough Transform, line fitting Introduction to Computer Vision CSE 152 Lecture 11-a Announcements Assignment 2: Due today Midterm: Thursday, May 10 in class Non-maximum suppression For every
Elaborazione delle Immagini Informazione Multimediale. Raffaella Lanzarotti
 Elaborazione delle Immagini Informazione Multimediale Raffaella Lanzarotti HOUGH TRANSFORM Paragraph 4.3.2 of the book at link: szeliski.org/book/drafts/szeliskibook_20100903_draft.pdf Thanks to Kristen
Elaborazione delle Immagini Informazione Multimediale Raffaella Lanzarotti HOUGH TRANSFORM Paragraph 4.3.2 of the book at link: szeliski.org/book/drafts/szeliskibook_20100903_draft.pdf Thanks to Kristen
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/05 TEXTURE ANALYSIS
 ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
1. What are the derivative operators useful in image segmentation? Explain their role in segmentation.
 1. What are the derivative operators useful in image segmentation? Explain their role in segmentation. Gradient operators: First-order derivatives of a digital image are based on various approximations
1. What are the derivative operators useful in image segmentation? Explain their role in segmentation. Gradient operators: First-order derivatives of a digital image are based on various approximations
Finding 2D Shapes and the Hough Transform
 CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
OpenGL Graphics System. 2D Graphics Primitives. Drawing 2D Graphics Primitives. 2D Graphics Primitives. Mathematical 2D Primitives.
 D Graphics Primitives Eye sees Displays - CRT/LCD Frame buffer - Addressable pixel array (D) Graphics processor s main function is to map application model (D) by projection on to D primitives: points,
D Graphics Primitives Eye sees Displays - CRT/LCD Frame buffer - Addressable pixel array (D) Graphics processor s main function is to map application model (D) by projection on to D primitives: points,
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang
 Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
High Level Computer Vision. Basic Image Processing - April 26, 2o17. Bernt Schiele - Mario Fritz -
 High Level Computer Vision Basic Image Processing - April 26, 2o17 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de mpi-inf.mpg.de/hlcv Today - Basics of Digital Image Processing
High Level Computer Vision Basic Image Processing - April 26, 2o17 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de mpi-inf.mpg.de/hlcv Today - Basics of Digital Image Processing
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Digital Image Processing. Image Enhancement - Filtering
 Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Digital Image Processing. Prof. P.K. Biswas. Department of Electronics & Electrical Communication Engineering
 Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
Texture. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors
 Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Lecture Image Enhancement and Spatial Filtering
 Lecture Image Enhancement and Spatial Filtering Harvey Rhody Chester F. Carlson Center for Imaging Science Rochester Institute of Technology rhody@cis.rit.edu September 29, 2005 Abstract Applications of
Lecture Image Enhancement and Spatial Filtering Harvey Rhody Chester F. Carlson Center for Imaging Science Rochester Institute of Technology rhody@cis.rit.edu September 29, 2005 Abstract Applications of
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 2012 Hough Transform Lecture-18 Sections 4.2, 4.3 Fundamentals of Computer Vision Image Feature Extraction Edges (edge pixels) Sobel, Roberts, Prewit Laplacian of Gaussian
CAP 5415 Computer Vision Fall 2012 Hough Transform Lecture-18 Sections 4.2, 4.3 Fundamentals of Computer Vision Image Feature Extraction Edges (edge pixels) Sobel, Roberts, Prewit Laplacian of Gaussian
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
Region & edge based Segmentation
 INF 4300 Digital Image Analysis Region & edge based Segmentation Fritz Albregtsen 06.11.2018 F11 06.11.18 IN5520 1 Today We go through sections 10.1, 10.4, 10.5, 10.6.1 We cover the following segmentation
INF 4300 Digital Image Analysis Region & edge based Segmentation Fritz Albregtsen 06.11.2018 F11 06.11.18 IN5520 1 Today We go through sections 10.1, 10.4, 10.5, 10.6.1 We cover the following segmentation
Lecture 2 Image Processing and Filtering
 Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Image Processing Fundamentals. Nicolas Vazquez Principal Software Engineer National Instruments
 Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
GNR401M Remote Sensing and Image Processing
 GNR401M Remote Sensing and Image Processing Guest Instructor: Prof. B. Krishna Mohan CSRE, IIT Bombay bkmohan@csre.iitb.ac.in Slot 5 Guest Lectures 3 4 Neighborhood Operations Sept. 5, 7 013 9.30 AM 11.00
GNR401M Remote Sensing and Image Processing Guest Instructor: Prof. B. Krishna Mohan CSRE, IIT Bombay bkmohan@csre.iitb.ac.in Slot 5 Guest Lectures 3 4 Neighborhood Operations Sept. 5, 7 013 9.30 AM 11.00
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
To graph the point (r, θ), simply go out r units along the initial ray, then rotate through the angle θ. The point (1, 5π 6. ) is graphed below:
, simply go out r units along the initial ray, then rotate through the angle θ. The point (1, 5π 6. ) is graphed below:") Polar Coordinates Any point in the plane can be described by the Cartesian coordinates (x, y), where x and y are measured along the corresponding axes. However, this is not the only way to represent points
Polar Coordinates Any point in the plane can be described by the Cartesian coordinates (x, y), where x and y are measured along the corresponding axes. However, this is not the only way to represent points
Automated Detection for Baseball Batter Analysis Using Image Processing and Segmentation Methods
 Automated Detection for Baseball Batter Analysis Using Image Processing and Segmentation Methods Jeremy Storer Bowling Green State University Department of Computer Science Bowling Green, Ohio 43403 e-mail:
Automated Detection for Baseball Batter Analysis Using Image Processing and Segmentation Methods Jeremy Storer Bowling Green State University Department of Computer Science Bowling Green, Ohio 43403 e-mail:
Image Processing. BITS Pilani. Dr Jagadish Nayak. Dubai Campus
 Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
OBJECT detection in general has many applications
 1 Implementing Rectangle Detection using Windowed Hough Transform Akhil Singh, Music Engineering, University of Miami Abstract This paper implements Jung and Schramm s method to use Hough Transform for
1 Implementing Rectangle Detection using Windowed Hough Transform Akhil Singh, Music Engineering, University of Miami Abstract This paper implements Jung and Schramm s method to use Hough Transform for
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
PARAMETRIC EQUATIONS AND POLAR COORDINATES
 10 PARAMETRIC EQUATIONS AND POLAR COORDINATES PARAMETRIC EQUATIONS & POLAR COORDINATES A coordinate system represents a point in the plane by an ordered pair of numbers called coordinates. PARAMETRIC EQUATIONS
10 PARAMETRIC EQUATIONS AND POLAR COORDINATES PARAMETRIC EQUATIONS & POLAR COORDINATES A coordinate system represents a point in the plane by an ordered pair of numbers called coordinates. PARAMETRIC EQUATIONS