Building a grid-point cloud-semantic map based on graph for the navigation of intelligent wheelchair
|
|
|
- Suzanna Richard
- 5 years ago
- Views:
Transcription
1 Proceedings of the 21th International Conference on Automation & Computing, University of Strathclyde, Glasgow, UK, September 2015 Building a grid-point cloud-semantic map based on graph for the navigation of intelligent wheelchair Cheng ZHAO*, Huosheng HU, Dongbing GU School of Computer Science and Electrical Engineering, University of Essex CO4 3SQ, Colchester, UK IRobotCheng@gmail.com, hhu@essex.ac.uk, dgu@essex.ac.uk Abstract The automatic navigation of the intelligent wheelchair is a major challenge for its applications. Most previous researches mainly focus on 2D navigation of intelligent wheelchair, which loses many useful environment information. This paper proposed a novel Grid-Point Cloud-Semantic Multi-layered Map based on graph optimization for intelligent wheelchair navigation. For mapping, the 2D grid map is at the bottom, the 3D point cloud map is on the grid map and the semantic markers are labelled in them. The semantic markers combine the name and coordinate value of object marker together. For navigation, the wheelchair uses the grid map for localization and path planning, uses the point cloud map for feature extraction and obstacle avoidance, and uses the semantic markers for humanrobot vocal interaction. A number of experiments are carried out in real environments to verify its feasibility. Keywords Graph-based SLAM, Grid Map, Point Cloud Map, Semantic Labelling, Navigation I. INTRODUCTION Intelligent wheelchair is a very useful assisted living application for the elderly and disabled people, which can decrease the pressure of ageing of population. The availability of automatical navigation of intelligent wheelchair is necessary in hospital, office and home. In the past decade, there are many notable successes for the simultaneous localization and mapping(slam) in robotics community. There are four mainly kinds of typical map now: grid map, point cloud map, topological map and semantic map. There are many navigation researches that focus on different type of maps. The outline of grid and point cloud mapping is similar and it can be classified as filtering, smoothing and graphbased approaches. The state of filtering approach consists in current robot position and map, which can perform a online state estimation. When the new measurement is available, the estimate is augmented. The Kalman [1][2], particle [3][4], information [5][6] filter are very popular online SLAM methods. In term of smoothing approach [7][8] that relies on leastsquare error minimization estimate the whole trajectory of robot through the whole set of measurements. Recently, the graph-based SLAM [9][10][11] achieved many breakthroughs, which constructs a graph out of the raw sensor measurements. The graph consists of the nodes each of which represents the robot position with the measurements from this position and edges each of which represents the spatial constraint between two robot poses. The constraint is actually the transformation relating two robot poses and it can be calculated through odometry measurements or aligning the observations. After constructing the graph, the next step is graph optimization: calculating a most likely configuration that best satisfies the constrains. However online processing for global loop closure detection is difficult in large-scale and long-term environment, the work in [12] proposed a graph-based memory management approach that only considers portions of map satisfy online processing requirements. The only difference between grip and point cloud mapping is that replacing the 2D scan matching and loop closure detecting with counterparts that operate 3D point cloud. The work in [13] proposed a hybrid map that integrates grid and topological map for indoor navigation. The work in [14] proposed an approach to segment and detect the room spaces for navigation using range data in office environment. Using the anchoring technique, [15] labels the topological map with semantic information for navigation. The works in [16][17] introduced an approach to learn topological maps from geometric map by applying semantic classification procedure based on associative Markov networks and AdaBoost. Many work used visual features from camera sensor like [18] to extract semantic information via place categorization. The paper [19] integrated a robust image labelling method with a dense 3D semantic map. In addition, many work added rich semantic information to the map through human-robot interaction for navigation. In [20], a contextual topological map was built through making the robot follow the user and verbal commentary. The work in [21] built the semantic map through clarification natural language dialogues between human and robot. The system in [22] integrated laser and vision sensors for place and object recognition as well as a linguistic framework, which create conceptual representation of human-made indoor environment. The work in [23] summarized many multi-modal interactions such as speech, gesture and vision for semantic labelling, which can make the robot get rich environment knowledge without many pre-requisites features. Different types of map have their own advantages and disadvantages for navigation. Grid map is easy to make path planning but it does not have enough 3D features and semantic information. Point cloud map is easy to get enough features information but it is hard to use for path planning because of high complexity. Semantic map can provide the knowledge of environment for human-robot interaction but the robot can not perform any action based on it. It is necessary to combine different type of map together in order to make the navigation of robot more efficiently. This paper proposes a grid-point cloudsemantic multi-layered map for the navigation of intelligent wheelchair and carries out some related experiments in real environment. The rest of this paper is organized as follows. Section 2 introduces the intelligent wheelchair platform and outlines the basic system workflow. Section 3 outlines the 222

2 approach deployed in this research. In section 4, some related experiment results are presented to verify the performance of the proposed approach. Finally, section 5 makes a brief conclusion and future work. A. Robot Platform II. SYSTEM OVERVIEW The platform used in this work is a commercial intelligent wheelchair Spectra Plus equipped with a Kinect which provides RGB and depth information, a Hokuyo URG-04LX- UG01 Laser which provides 2D laser scan information and optical encoders which provide odometry transformation information. Computation is preformed on an on board PC (Intel Pentium(R) 2.30 GHz, 8G RAM and Integrated Graphics) installed with Ubuntu and ROS Indigo. The platform snapshot is shown in Figure 1. B. Architecture Overview Fig. 1: The platform snapshot. The mapping module can be broken up into three modules: Frontend, Backend and Map creation. The frontend mainly obtains the sensor data, extracts the features and calculates the geometric relationships between robot and landmarks. The backend mainly constructs a graph, preforms loop closure detection and optimizes the graph structure. Finally, this module outputs a maximum likelihood solution of the robot trajectory. In addition, it also performs a model matching through comparing the object database with the features from RGB frames. If the model matching is successful, the mass centre position of the object will be calculated through the depth images. This position is combined with the object name together in a semantic marker. In terms of map creation, the 2D grid map and 3D point map are generated based on the trajectory. Then the semantic markers are labelled to them. Combining them together, the multi-layered map is finally generated. The navigation module consists of localization, getting a destination, path planning. The wheelchair can perform the localization based on the trajectory from graph SLAM. Then the user tells the wheelchair the destination name using vocal interface. The wheelchair can get the position of destination from semantic markers. Finally, the wheelchair performs path planning using grid map and obstacle avoidance using point cloud map. The architecture overview is shown in Figure 2. A. Pose graph outline III. APPROACHES The map of graph-based is a graph consisting of nodes and edges like G = {V,E}. The nodes [12] contain the odometry poses, laser scans, RGB and depth images of each location. In addition, they also save visual words which are used for loop closure detection. The edges are mode of neighbors and loop closures, which save the geometrical transformation between nodes. When the odometry transformation between the current and previous nodes is generated, the neighbor edges are added to the graph. When a loop closure detection is found between the current node and one of the previous maps, the loop closure edges are added to the graph. After the construction of graph, the graph optimization is performed which calculates the most likely configuration that best satisfies the constraints of edges. Suppose x =(x 1...x 2 ) T is a vector of parameters which represent the configuration of nodes. ω ij and Ω ij represent the mean and the information matrix of the observation of node j and i respectively. For the state x, f ij (x) is the function which can calculate the observation of the current state. The residual r ij can be calculated via equation (1). r ij (x) =ω ij f ij (x) (1) The amount of error introduced by constraints which are calculated by real or visual odometry, weighed by its information, can be obtained via equation (2). d ij (x) 2 = r ij (x) T Ω ij r ij (x) (2) Assuming all the constraints to be independent, the overall error can be calculated through equation (3). D 2 (x) = d ij (x) 2 = r ij (x) T Ω ij r ij (x) (3) where d ij (x) 2 is residual of the edge which connects node i and j in graph φ. So the key of graph-based SLAM is to find a state x that minimizes the overall error. x =argmin x r ij (x) T Ω ij r ij (x) (4) Compactly, it is rewritten in equation (5) x =argmin r ij (x) 2 ij x where ij =Ω 1 ij is the corresponding covariance matrix of the information matrix. B. Loop closure detection The approach of loop closure detection [12][24] is used in this work. They use a Bayesian filter to evaluate loop closure hypotheses over all previous images. If the hypothesis reaches the pre-defined threshold H, a loop closure is detected. In order to compute the likelihood required by the filter, the ORB features is used for an incremental visual words considering the low computing power of the on board PC. If you have a powerful on board PC, the best choice is SIFT feature with GPU. For every 2D point from RGB image where the visual words are extracted, the relating 3D position can be calculated via calibration matrix and the depth image. So, every visual (5) 223
3 Vocal interface RGB Features extraction RANSAC Model matching Position calcultation Semantic markers Destination position Kinect Depth Point cloud subsampling ICP Object features database 2D map creation Path planning Wheel odometry Transformation Loop detection& Graph optimization Trajectory Multi-layered map Reach the destination Laser 2D Scan Scan Matching 3D map creation Obstacle avoidance Frontend Backend Map creation Navigation Fig. 2: Architecture overview. words 3D position can be obtained. Using the 3D visual word correspondences, every transformation between the matching images is computed via RANSAC if a loop closure is found. When the minimum of I inliers is found, the loop closure is successful and the related edge is added to the graph. C. Graph optimization For graph optimization, the G2O [25][26] framework is used in our work. This approach performs a minimization of non-linear error function that can be represented as a graph. G2O can minimize the error in a graph in which vertices are parameterized by transformation and edges represent constraints between vertices with associated covariance matrices. It maximizes the likelihood of the vertex parameters subject to the constraints using stochastic gradient descent. When the robot revisits a known part of the map, the loop closure edges in the graph can diminish the accumulated error introduced by odometry. D. Map representation Based on the trajectory outputted from graph-based SLAM, the laser scans are assembled together and the 2D grid map is generated at the bottom, meanwhile the RGB and depth images are assembled together and the 3D point cloud map is generated on the grid map. In terms of semantic labelling, firstly a database of objects features is built. Then a model matching is performed comparing the extracted features from RGB images and the features in object database. If a model matching is successful, the centre of mass position of the found object can be calculated through corresponding depth image. This position is combined with object name in a semantic marker. Due to the low computing power of the on board PC, the ORB feature is selected as the feature extraction and description. Lastly, the semantic markers are labelled in the 2D and 3D map. E. Navigation Where am I, Where shall I go and How to get there are the three central issues of navigation. For the first issue, the intelligent wheelchair can get its position through the trajectory outputted from graph-base SLAM. For the second issue, the user can tell wheelchair the destination name using vocal interface through bluetooth earphone. The open source speech recognition toolkit Pocket Sphinx [27] is used for humanrobot vocal interaction, which is easy to use for training(just upload the semantic text to the tool website). The voice will be transformed to text and then a string matching is performed. Finally the wheelchair can find the position of corresponding destination name from semantic markers. For the third issue, the wheelchair transforms the grid map to a cost map [28][29], and then uses Dijkstra algorithm to search the cost map to find a route that has minimal sum of the cost value. For obstacle avoidance, the obstacles and ground are segmented by normal filtering using point cloud map. All points with normal in the z direction are labelled as ground and all the others are labelled as obstacles. Lastly, movebase package [30] in ROS is used for the motion planning of intelligent wheelchair. A. 2D grid map IV. EXPERIMENTS As shown in the Figure 3, the 2D grid map is generated using laser scans. The blue line represents the trajectory of the wheelchair and the small blue point represents the graph node. The yellow line connected with two nodes represents that there is a loop closure between them. There are many loop closures in A, B, C because the wheelchair rotated by 360 degrees there, while there are also many loop closures in D, E, F because the wheelchair moved with a loop trajectory. B. 3D point cloud map As shown in the Figure 5, the 3D point cloud map is generated using RGB-D information. The whole point cloud map are made of a large number of RGB-D frames obtained from every node in the graph. Those frames are aligned together through the transformation constrains. C. Semantic labelling The object database stores the ORB features of Baxter, Fox robot, Robot fish, Fly robot and Robot dog. By extracting the 224
















4 F D A B D E F C B A E C Fig. 3: 2D grid map. Fig. 4: 3D semantic labelling. 225


5 Fig. 5: 3D point cloud map. B C G A H F E D Fig. 6: Multi-layered map. 226

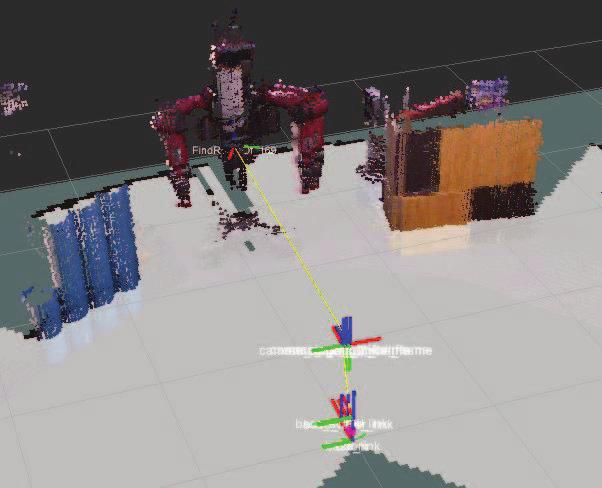
6 Fig. 7: Navigation in hybrid map. ORB features from RGB images, these robots were found in the process of mapping, as show in the colorized box from Figure 4. The positions of their centre mass were calculated using the depth image. As shown in Figure 4, there is a yellow line connecting the wheelchair and the object marker. Finally, those semantic markers (X, Y, Z) will be labelled in the 3D point cloud map. D. Multi-layered map As shown in the Figure 6, the multi-layered map is generated: the grid map A is at the bottom, the point cloud map B is on the grid map and the semantic markers C, D, E, F, G are labelled as green points in the point cloud map. The green line represents the trajectory of the wheelchair. E. Navigation As shown in the Figure 7, in the point cloud map, the obstacles are inflated and labelled as red colour, the ground is labelled as green colour. The blue and red line on the grid map are the outcomes of global and local path planning respectively. All the mapping and navigation videos of experiments can be found Tl5R4MBKIXsGI0sFlJuXQ V. CONCLUSION As there are some obviously drawbacks when the intelligent wheelchair performs navigation only using one single type of map, in this paper a Grid-Point Cloud-Semantic Multilayered map based on graph optimization for the navigation is proposed. The grid map at the bottom is used for localization and path planning, the point cloud map on the grid map is used for features extraction and obstacles avoidance, the semantic markers is used for human-robot vocal interaction. This hybrid map can make intelligent wheelchair perform navigation task more efficiently. In the future, our work will mainly focus on adding more rich semantic information to this hybrid map through 3D labelling. ACKNOWLEDGEMENT The 1st author is financially supported by scholarships from China Scholarship Council and University of Essex, U.K. REFERENCES [1] C. P. Smith R, Self M, Estimating Uncertain Spatial Relationships in Robotics. Springer New York, [2] M. W. M. Gamini Dissanayake, P. Newman, S. Clark, H. F. Durrant- Whyte, and M. Csorba, A solution to the simultaneous localization and map building (SLAM) problem, IEEE Transactions on Robotics and Automation, vol. 17, no. 3, pp , [3] M. Montemerlo, S. Thrun, D. Koller, and B. Wegbreit, FastSLAM: A factored solution to the simultaneous localization and mapping problem, in Proc. of 8th National Conference on Artificial Intelligence/14th Conference on Innovative Applications of Artificial Intelligence, vol. 68, no. 2, 2002, pp [4] G. Grisetti, C. Stachniss, and W. Burgard, Improved techniques for grid mapping with Rao-Blackwellized particle filters, IEEE Transactions on Robotics, vol. 23, pp ,
7 [5] R. M. Eustice, H. Singh, and J. J. Leonard, Exactly sparse delayed-state filters, in Robotics and Automation, ICRA Proceedings of the 2005 IEEE International Conference on. IEEE, 2005, pp [6] S. Thrun, Y. Liu, D. Koller, A. Ng, Z. Ghahramani, and H. Durrant- Whyte, Simultaneous Localization and Mapping with Sparse Extended Information Filters, vol. 23, no. 7, pp , [7] F. Dellaert and M. Kaess, Square Root SAM: Simultaneous Localization and Mapping via Square Root Information Smoothing, The International Journal of Robotics Research, vol. 25, no. 12, pp , [8] E. Olson, J. Leonard, and S. Teller, Fast iterative alignment of pose graphs with poor initial estimates, in Proceedings - IEEE International Conference on Robotics and Automation, vol. 2006, no. May, 2006, pp [9] S. Thrun, The Graph SLAM Algorithm with Applications to Large- Scale Mapping of Urban Structures, The International Journal of Robotics Research, vol. 25, no. 5-6, pp , [10] H. Strasdat, J. M. M. Montiel, and A. J. Davison, Visual SLAM: Why filter? Image and Vision Computing, vol. 30, no. 2, pp , [11] F. Endres, J. Hess, J. Sturm, D. Cremers, and W. Burgard, 3-D Mapping with an RGB-D camera, IEEE Transactions on Robotics, vol. 30, no. 1, pp , [12] M. Labbe and F. Michaud, Online global loop closure detection for large-scale multi-session graph-based SLAM, in 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014, pp [13] S. Thrun and A. Bücken, Integrating Grid-Based and Topological Maps for Mobile Robot Navigation, Proceedings Of The National Conference On Artificial Intelligence, vol. 13, no. August, pp , [14] P. Buschka and A. Saffiotti, A virtual sensor for room detection, IEEE/RSJ International Conference on Intelligent Robots and Systems, vol. 1, no. October, pp , [15] C. Galindo, A. Saffiotti, S. Coradeschi, P. Buschka, J. a. Fernández- Madrigal, and J. González, Multi-hierarchical semantic maps for mobile robotics, in 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, 2005, pp [16] O. Mozos and W. Burgard, Supervised Learning of Topological Maps using Semantic Information Extracted from Range Data, 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp , [17] E. Brunskill, T. Kollar, and N. Roy, Topological mapping using spectral clustering and classification, 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp , [18] J. Wu, H. I. Christensen, and J. M. Rehg, Visual place categorization: Problem, dataset, and algorithm, in 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2009, 2009, pp [19] Z. Zhao and X. Chen, Semantic mapping for object category and structural class, in 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, no. Iros, 2014, pp [20] A. Diosi, G. Taylor, and L. Kleeman, Interactive SLAM using laser and advanced sonar, in Proceedings - IEEE International Conference on Robotics and Automation, vol. 2005, no. April, 2005, pp [21] G.-J. M. Kruijff, H. Zender, P. Jensfelt, and H. I. Christensen, Clarification dialogues in human-augmented mapping, Proceeding of the 1st ACM SIGCHI/SIGART conference on Human-robot interaction - HRI 06, p. 282, [22] H. Zender, O. Martínez Mozos, P. Jensfelt, G. J. M. Kruijff, and W. Burgard, Conceptual spatial representations for indoor mobile robots, Robotics and Autonomous Systems, vol. 56, no. 6, pp , [23] G. Randelli, T. M. Bonanni, L. Iocchi, and D. Nardi, Knowledge acquisition through human-robot multimodal interaction, Intelligent Service Robotics, vol. 6, no. 1, pp , [24] M. Labbe and F. Michaud, Appearance-based loop closure detection for online large-scale and long-term operation, IEEE Transactions on Robotics, vol. 29, pp , [25] R. Kümmerle, G. Grisetti, H. Strasdat, K. Konolige, and W. Burgard, G2o: A general framework for graph optimization, in Proceedings - IEEE International Conference on Robotics and Automation, 2011, pp [26] G. Grisetti, S. Grzonka, C. Stachniss, P. Pfaff, and W. Burgard, Efficient estimation of accurate maximum likelihood maps in 3D, in IEEE International Conference on Intelligent Robots and Systems, no. Ml, 2007, pp [27] D. Huggins-Daines, M. Kumar, A. Chan, A. Black, M. Ravishankar, and A. Rudnicky, Pocketsphinx: A Free, Real-Time Continuous Speech Recognition System for Hand-Held Devices, 2006 IEEE International Conference on Acoustics Speech and Signal Processing Proceedings, vol. 1, pp , [28] J. King and M. Likhachev, Efficient cost computation in cost map planning for non-circular robots, in Intelligent Robots and Systems. St.Louis,MO: Ieee, Oct. 2009, pp [29] E. Marder-Eppstein, E. Berger, T. Foote, B. Gerkey, and K. Konolige, The Office Marathon: Robust navigation in an indoor office environment, in IEEE International Conference on Robotics and Automation. Anchorage,AK: Ieee, May 2010, pp [30] B. P. Gerkey and K. Konolige, Planning and Control in Unstructured Terrain, in ICRA Workshop on Path Planning on Costmaps,
Efficient SLAM Scheme Based ICP Matching Algorithm Using Image and Laser Scan Information
 Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
Semantic Mapping and Reasoning Approach for Mobile Robotics
 Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Introduction to Mobile Robotics SLAM Grid-based FastSLAM. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Evaluation of Pose Only SLAM
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Evaluation of Pose Only SLAM Gibson Hu, Shoudong Huang and Gamini Dissanayake Abstract In
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Evaluation of Pose Only SLAM Gibson Hu, Shoudong Huang and Gamini Dissanayake Abstract In
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Implementation of Odometry with EKF for Localization of Hector SLAM Method
 Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
A Real-Time RGB-D Registration and Mapping Approach by Heuristically Switching Between Photometric And Geometric Information
 A Real-Time RGB-D Registration and Mapping Approach by Heuristically Switching Between Photometric And Geometric Information The 17th International Conference on Information Fusion (Fusion 2014) Khalid
A Real-Time RGB-D Registration and Mapping Approach by Heuristically Switching Between Photometric And Geometric Information The 17th International Conference on Information Fusion (Fusion 2014) Khalid
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
arxiv: v1 [cs.ro] 24 Nov 2018
![arxiv: v1 [cs.ro] 24 Nov 2018](/thumbs/91/105453267.jpg "arxiv: v1 [cs.ro] 24 Nov 2018") BENCHMARKING AND COMPARING POPULAR VISUAL SLAM ALGORITHMS arxiv:1811.09895v1 [cs.ro] 24 Nov 2018 Amey Kasar Department of Electronics and Telecommunication Engineering Pune Institute of Computer Technology
BENCHMARKING AND COMPARING POPULAR VISUAL SLAM ALGORITHMS arxiv:1811.09895v1 [cs.ro] 24 Nov 2018 Amey Kasar Department of Electronics and Telecommunication Engineering Pune Institute of Computer Technology
Multi-layered Map based Navigation and Interaction for an Intelligent Wheelchair
 Proceeding of the IEEE International Conference on Robotics and Biomimetics (ROBIO) Shenzhen, China, December 2013 Multi-layered Map based Navigation and Interaction for an Intelligent Wheelchair Ruijiao
Proceeding of the IEEE International Conference on Robotics and Biomimetics (ROBIO) Shenzhen, China, December 2013 Multi-layered Map based Navigation and Interaction for an Intelligent Wheelchair Ruijiao
L15. POSE-GRAPH SLAM. NA568 Mobile Robotics: Methods & Algorithms
 L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping Feature-Based SLAM Filtering Problem: Motion Prediction
L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping Feature-Based SLAM Filtering Problem: Motion Prediction
Using Augmented Measurements to Improve the Convergence of ICP. Jacopo Serafin and Giorgio Grisetti
 Jacopo Serafin and Giorgio Grisetti Point Cloud Registration We want to find the rotation and the translation that maximize the overlap between two point clouds Page 2 Point Cloud Registration We want
Jacopo Serafin and Giorgio Grisetti Point Cloud Registration We want to find the rotation and the translation that maximize the overlap between two point clouds Page 2 Point Cloud Registration We want
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Robot Mapping. Least Squares Approach to SLAM. Cyrill Stachniss
 Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Graphbased. Kalman filter. Particle filter. Three Main SLAM Paradigms. Robot Mapping. Least Squares Approach to SLAM. Least Squares in General
 Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Robot Mapping. TORO Gradient Descent for SLAM. Cyrill Stachniss
 Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Using the ikart mobile platform
 Using the mobile platform Marco Randazzo Sestri Levante, July 23th, 2012 General description A holonomic mobile base for icub: Omnidirectional movement (six omnidirectional wheels) Integrates an high-performance
Using the mobile platform Marco Randazzo Sestri Levante, July 23th, 2012 General description A holonomic mobile base for icub: Omnidirectional movement (six omnidirectional wheels) Integrates an high-performance
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
3D Environment Reconstruction
 3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
A Proposal for Semantic Map Representation and Evaluation
 A Proposal for Semantic Map Representation and Evaluation Roberto Capobianco, Jacopo Serafin, Johann Dichtl, Giorgio Grisetti, Luca Iocchi and Daniele Nardi Department of Computer, Control and Management
A Proposal for Semantic Map Representation and Evaluation Roberto Capobianco, Jacopo Serafin, Johann Dichtl, Giorgio Grisetti, Luca Iocchi and Daniele Nardi Department of Computer, Control and Management
Kaijen Hsiao. Part A: Topics of Fascination
 Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
D-SLAM: Decoupled Localization and Mapping for Autonomous Robots
 D-SLAM: Decoupled Localization and Mapping for Autonomous Robots Zhan Wang, Shoudong Huang, and Gamini Dissanayake ARC Centre of Excellence for Autonomous Systems (CAS), Faculty of Engineering, University
D-SLAM: Decoupled Localization and Mapping for Autonomous Robots Zhan Wang, Shoudong Huang, and Gamini Dissanayake ARC Centre of Excellence for Autonomous Systems (CAS), Faculty of Engineering, University
A Sparse Hybrid Map for Vision-Guided Mobile Robots
 A Sparse Hybrid Map for Vision-Guided Mobile Robots Feras Dayoub Grzegorz Cielniak Tom Duckett Department of Computing and Informatics, University of Lincoln, Lincoln, UK {fdayoub,gcielniak,tduckett}@lincoln.ac.uk
A Sparse Hybrid Map for Vision-Guided Mobile Robots Feras Dayoub Grzegorz Cielniak Tom Duckett Department of Computing and Informatics, University of Lincoln, Lincoln, UK {fdayoub,gcielniak,tduckett}@lincoln.ac.uk
SLAM using Visual Scan-Matching with Distinguishable 3D Points
 SLAM using Visual Scan-Matching with Distinguishable 3D Points Federico Bertolli, Patric Jensfelt, and Henrik I. Christensen Centre for Autonomous Systems Royal Institute of Technology, Stockholm, Sweden
SLAM using Visual Scan-Matching with Distinguishable 3D Points Federico Bertolli, Patric Jensfelt, and Henrik I. Christensen Centre for Autonomous Systems Royal Institute of Technology, Stockholm, Sweden
Monocular SLAM for a Small-Size Humanoid Robot
 Tamkang Journal of Science and Engineering, Vol. 14, No. 2, pp. 123 129 (2011) 123 Monocular SLAM for a Small-Size Humanoid Robot Yin-Tien Wang*, Duen-Yan Hung and Sheng-Hsien Cheng Department of Mechanical
Tamkang Journal of Science and Engineering, Vol. 14, No. 2, pp. 123 129 (2011) 123 Monocular SLAM for a Small-Size Humanoid Robot Yin-Tien Wang*, Duen-Yan Hung and Sheng-Hsien Cheng Department of Mechanical
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
C-LOG: A Chamfer Distance Based Method for Localisation in Occupancy Grid-maps
 23 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 23. Tokyo, Japan C-LOG: A Chamfer Distance Based Method for Localisation in Occupancy Grid-maps Lakshitha Dantanarayana,
23 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 23. Tokyo, Japan C-LOG: A Chamfer Distance Based Method for Localisation in Occupancy Grid-maps Lakshitha Dantanarayana,
Interactive SLAM using Laser and Advanced Sonar
 Interactive SLAM using Laser and Advanced Sonar Albert Diosi, Geoffrey Taylor and Lindsay Kleeman ARC Centre for Perceptive and Intelligent Machines in Complex Environments Department of Electrical and
Interactive SLAM using Laser and Advanced Sonar Albert Diosi, Geoffrey Taylor and Lindsay Kleeman ARC Centre for Perceptive and Intelligent Machines in Complex Environments Department of Electrical and
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Announcements. Recap Landmark based SLAM. Types of SLAM-Problems. Occupancy Grid Maps. Grid-based SLAM. Page 1. CS 287: Advanced Robotics Fall 2009
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
D-SLAM: Decoupled Localization and Mapping for Autonomous Robots
 D-SLAM: Decoupled Localization and Mapping for Autonomous Robots Zhan Wang, Shoudong Huang, and Gamini Dissanayake ARC Centre of Excellence for Autonomous Systems (CAS) Faculty of Engineering, University
D-SLAM: Decoupled Localization and Mapping for Autonomous Robots Zhan Wang, Shoudong Huang, and Gamini Dissanayake ARC Centre of Excellence for Autonomous Systems (CAS) Faculty of Engineering, University
Final Project Report: Mobile Pick and Place
 Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Matching Evaluation of 2D Laser Scan Points using Observed Probability in Unstable Measurement Environment
 Matching Evaluation of D Laser Scan Points using Observed Probability in Unstable Measurement Environment Taichi Yamada, and Akihisa Ohya Abstract In the real environment such as urban areas sidewalk,
Matching Evaluation of D Laser Scan Points using Observed Probability in Unstable Measurement Environment Taichi Yamada, and Akihisa Ohya Abstract In the real environment such as urban areas sidewalk,
SLAM With Sparse Sensing
 To appear in the 2006 IEEE International Conference on Robotics & Automation (ICRA 2006) SLAM With Sparse Sensing Kristopher R. Beevers Wesley H. Huang Rensselaer Polytechnic Institute, Department of Computer
To appear in the 2006 IEEE International Conference on Robotics & Automation (ICRA 2006) SLAM With Sparse Sensing Kristopher R. Beevers Wesley H. Huang Rensselaer Polytechnic Institute, Department of Computer
Vision-Only Autonomous Navigation Using Topometric Maps
 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Vision-Only Autonomous Navigation Using Topometric Maps Feras Dayoub, Timothy Morris, Ben
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Vision-Only Autonomous Navigation Using Topometric Maps Feras Dayoub, Timothy Morris, Ben
An Evaluation of the RGB-D SLAM System
 An Evaluation of the RGB-D SLAM System Felix Endres 1 Jürgen Hess 1 Nikolas Engelhard 1 Jürgen Sturm 2 Daniel Cremers 2 Wolfram Burgard 1 Abstract We present an approach to simultaneous localization and
An Evaluation of the RGB-D SLAM System Felix Endres 1 Jürgen Hess 1 Nikolas Engelhard 1 Jürgen Sturm 2 Daniel Cremers 2 Wolfram Burgard 1 Abstract We present an approach to simultaneous localization and
TORO - Efficient Constraint Network Optimization for SLAM
 TORO - Efficient Constraint Network Optimization for SLAM Cyrill Stachniss Joint work with Giorgio Grisetti and Wolfram Burgard Special thanks to and partial slide courtesy of: Diego Tipaldi, Edwin Olson,
TORO - Efficient Constraint Network Optimization for SLAM Cyrill Stachniss Joint work with Giorgio Grisetti and Wolfram Burgard Special thanks to and partial slide courtesy of: Diego Tipaldi, Edwin Olson,
A Tree Parameterization for Efficiently Computing Maximum Likelihood Maps using Gradient Descent
 A Tree Parameterization for Efficiently Computing Maximum Likelihood Maps using Gradient Descent Giorgio Grisetti Cyrill Stachniss Slawomir Grzonka Wolfram Burgard University of Freiburg, Department of
A Tree Parameterization for Efficiently Computing Maximum Likelihood Maps using Gradient Descent Giorgio Grisetti Cyrill Stachniss Slawomir Grzonka Wolfram Burgard University of Freiburg, Department of
Improving Simultaneous Mapping and Localization in 3D Using Global Constraints
 Improving Simultaneous Mapping and Localization in 3D Using Global Constraints Rudolph Triebel and Wolfram Burgard Department of Computer Science, University of Freiburg George-Koehler-Allee 79, 79108
Improving Simultaneous Mapping and Localization in 3D Using Global Constraints Rudolph Triebel and Wolfram Burgard Department of Computer Science, University of Freiburg George-Koehler-Allee 79, 79108
IBuILD: Incremental Bag of Binary Words for Appearance Based Loop Closure Detection
 IBuILD: Incremental Bag of Binary Words for Appearance Based Loop Closure Detection Sheraz Khan and Dirk Wollherr Chair of Automatic Control Engineering Technische Universität München (TUM), 80333 München,
IBuILD: Incremental Bag of Binary Words for Appearance Based Loop Closure Detection Sheraz Khan and Dirk Wollherr Chair of Automatic Control Engineering Technische Universität München (TUM), 80333 München,
Least Squares and SLAM Pose-SLAM
 Least Squares and SLAM Pose-SLAM Giorgio Grisetti Part of the material of this course is taken from the Robotics 2 lectures given by G.Grisetti, W.Burgard, C.Stachniss, K.Arras, D. Tipaldi and M.Bennewitz
Least Squares and SLAM Pose-SLAM Giorgio Grisetti Part of the material of this course is taken from the Robotics 2 lectures given by G.Grisetti, W.Burgard, C.Stachniss, K.Arras, D. Tipaldi and M.Bennewitz
Combined Trajectory Planning and Gaze Direction Control for Robotic Exploration
 Combined Trajectory Planning and Gaze Direction Control for Robotic Exploration Georgios Lidoris, Kolja Kühnlenz, Dirk Wollherr and Martin Buss Institute of Automatic Control Engineering (LSR) Technische
Combined Trajectory Planning and Gaze Direction Control for Robotic Exploration Georgios Lidoris, Kolja Kühnlenz, Dirk Wollherr and Martin Buss Institute of Automatic Control Engineering (LSR) Technische
Localization, Mapping and Exploration with Multiple Robots. Dr. Daisy Tang
 Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
IN recent years, NASA s Mars Exploration Rovers (MERs)
") Robust Landmark Estimation for SLAM in Dynamic Outdoor Environment Atsushi SAKAI, Teppei SAITOH and Yoji KURODA Meiji University, Department of Mechanical Engineering, 1-1-1 Higashimita, Tama-ku, Kawasaki,
Robust Landmark Estimation for SLAM in Dynamic Outdoor Environment Atsushi SAKAI, Teppei SAITOH and Yoji KURODA Meiji University, Department of Mechanical Engineering, 1-1-1 Higashimita, Tama-ku, Kawasaki,
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
Robust Laser Scan Matching in Dynamic Environments
 Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics December 19-23, 2009, Guilin, China Robust Laser Scan Matching in Dynamic Environments Hee-Young Kim, Sung-On Lee and Bum-Jae
Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics December 19-23, 2009, Guilin, China Robust Laser Scan Matching in Dynamic Environments Hee-Young Kim, Sung-On Lee and Bum-Jae
AN INCREMENTAL SLAM ALGORITHM FOR INDOOR AUTONOMOUS NAVIGATION
 20th IMEKO TC4 International Symposium and 18th International Workshop on ADC Modelling and Testing Research on Electric and Electronic Measurement for the Economic Upturn Benevento, Italy, September 15-17,
20th IMEKO TC4 International Symposium and 18th International Workshop on ADC Modelling and Testing Research on Electric and Electronic Measurement for the Economic Upturn Benevento, Italy, September 15-17,
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Mobile Robot Mapping and Localization in Non-Static Environments
 Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Improvements for an appearance-based SLAM-Approach for large-scale environments
 1 Improvements for an appearance-based SLAM-Approach for large-scale environments Alexander Koenig Jens Kessler Horst-Michael Gross Neuroinformatics and Cognitive Robotics Lab, Ilmenau University of Technology,
1 Improvements for an appearance-based SLAM-Approach for large-scale environments Alexander Koenig Jens Kessler Horst-Michael Gross Neuroinformatics and Cognitive Robotics Lab, Ilmenau University of Technology,
PROGRAMA DE CURSO. Robotics, Sensing and Autonomous Systems. SCT Auxiliar. Personal
 PROGRAMA DE CURSO Código Nombre EL7031 Robotics, Sensing and Autonomous Systems Nombre en Inglés Robotics, Sensing and Autonomous Systems es Horas de Horas Docencia Horas de Trabajo SCT Docentes Cátedra
PROGRAMA DE CURSO Código Nombre EL7031 Robotics, Sensing and Autonomous Systems Nombre en Inglés Robotics, Sensing and Autonomous Systems es Horas de Horas Docencia Horas de Trabajo SCT Docentes Cátedra
Filtering and mapping systems for underwater 3D imaging sonar
 Filtering and mapping systems for underwater 3D imaging sonar Tomohiro Koshikawa 1, a, Shin Kato 1,b, and Hitoshi Arisumi 1,c 1 Field Robotics Research Group, National Institute of Advanced Industrial
Filtering and mapping systems for underwater 3D imaging sonar Tomohiro Koshikawa 1, a, Shin Kato 1,b, and Hitoshi Arisumi 1,c 1 Field Robotics Research Group, National Institute of Advanced Industrial
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
CVPR 2014 Visual SLAM Tutorial Efficient Inference
 CVPR 2014 Visual SLAM Tutorial Efficient Inference kaess@cmu.edu The Robotics Institute Carnegie Mellon University The Mapping Problem (t=0) Robot Landmark Measurement Onboard sensors: Wheel odometry Inertial
CVPR 2014 Visual SLAM Tutorial Efficient Inference kaess@cmu.edu The Robotics Institute Carnegie Mellon University The Mapping Problem (t=0) Robot Landmark Measurement Onboard sensors: Wheel odometry Inertial
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Long-Term Online Multi-Session Graph-Based SPLAM with Memory Management
 This is a post-peer-review, pre-copyedit version of an article published in Autonomous Robots. The final authenticated version is available online at: http://dx.doi.org/10.1007/s10514-017-9682-5 Long-Term
This is a post-peer-review, pre-copyedit version of an article published in Autonomous Robots. The final authenticated version is available online at: http://dx.doi.org/10.1007/s10514-017-9682-5 Long-Term
Building Reliable 2D Maps from 3D Features
 Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Integrated systems for Mapping and Localization
 Integrated systems for Mapping and Localization Patric Jensfelt, Henrik I Christensen & Guido Zunino Centre for Autonomous Systems, Royal Institute of Technology SE 1 44 Stockholm, Sweden fpatric,hic,guidozg@nada.kth.se
Integrated systems for Mapping and Localization Patric Jensfelt, Henrik I Christensen & Guido Zunino Centre for Autonomous Systems, Royal Institute of Technology SE 1 44 Stockholm, Sweden fpatric,hic,guidozg@nada.kth.se
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Multi-Robot SLAM using Condensed Measurements
 Multi-Robot SLAM using Condensed Measurements M.T. Lázaro, L.M. Paz, P. Piniés, J.A. Castellanos and G. Grisetti Abstract In this paper we describe a Simultaneous Localization and Mapping (SLAM) approach
Multi-Robot SLAM using Condensed Measurements M.T. Lázaro, L.M. Paz, P. Piniés, J.A. Castellanos and G. Grisetti Abstract In this paper we describe a Simultaneous Localization and Mapping (SLAM) approach
Topological Mapping. Discrete Bayes Filter
 Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Using the Topological Skeleton for Scalable Global Metrical Map-Building
 Using the Topological Skeleton for Scalable Global Metrical Map-Building Joseph Modayil, Patrick Beeson, and Benjamin Kuipers Intelligent Robotics Lab Department of Computer Sciences University of Texas
Using the Topological Skeleton for Scalable Global Metrical Map-Building Joseph Modayil, Patrick Beeson, and Benjamin Kuipers Intelligent Robotics Lab Department of Computer Sciences University of Texas
Semantics in Human Localization and Mapping
 Semantics in Human Localization and Mapping Aidos Sarsembayev, Antonio Sgorbissa University of Genova, Dept. DIBRIS Via Opera Pia 13, 16145 Genova, Italy aidos.sarsembayev@edu.unige.it, antonio.sgorbissa@unige.it
Semantics in Human Localization and Mapping Aidos Sarsembayev, Antonio Sgorbissa University of Genova, Dept. DIBRIS Via Opera Pia 13, 16145 Genova, Italy aidos.sarsembayev@edu.unige.it, antonio.sgorbissa@unige.it
Fast and Accurate SLAM with Rao-Blackwellized Particle Filters
 Fast and Accurate SLAM with Rao-Blackwellized Particle Filters Giorgio Grisetti a,b Gian Diego Tipaldi b Cyrill Stachniss c,a Wolfram Burgard a Daniele Nardi b a University of Freiburg, Department of Computer
Fast and Accurate SLAM with Rao-Blackwellized Particle Filters Giorgio Grisetti a,b Gian Diego Tipaldi b Cyrill Stachniss c,a Wolfram Burgard a Daniele Nardi b a University of Freiburg, Department of Computer
Proceedings of the 2016 Winter Simulation Conference T. M. K. Roeder, P. I. Frazier, R. Szechtman, E. Zhou, T. Huschka, and S. E. Chick, eds.
 Proceedings of the 2016 Winter Simulation Conference T. M. K. Roeder, P. I. Frazier, R. Szechtman, E. Zhou, T. Huschka, and S. E. Chick, eds. SIMULATION RESULTS FOR LOCALIZATION AND MAPPING ALGORITHMS
Proceedings of the 2016 Winter Simulation Conference T. M. K. Roeder, P. I. Frazier, R. Szechtman, E. Zhou, T. Huschka, and S. E. Chick, eds. SIMULATION RESULTS FOR LOCALIZATION AND MAPPING ALGORITHMS
Using the Kinect as a Navigation Sensor for Mobile Robotics
 Using the Kinect as a Navigation Sensor for Mobile Robotics ABSTRACT Ayrton Oliver Dept. of Electrical and Computer Engineering aoli009@aucklanduni.ac.nz Burkhard C. Wünsche Dept. of Computer Science burkhard@cs.auckland.ac.nz
Using the Kinect as a Navigation Sensor for Mobile Robotics ABSTRACT Ayrton Oliver Dept. of Electrical and Computer Engineering aoli009@aucklanduni.ac.nz Burkhard C. Wünsche Dept. of Computer Science burkhard@cs.auckland.ac.nz
Localization algorithm using a virtual label for a mobile robot in indoor and outdoor environments
 Artif Life Robotics (2011) 16:361 365 ISAROB 2011 DOI 10.1007/s10015-011-0951-7 ORIGINAL ARTICLE Ki Ho Yu Min Cheol Lee Jung Hun Heo Youn Geun Moon Localization algorithm using a virtual label for a mobile
Artif Life Robotics (2011) 16:361 365 ISAROB 2011 DOI 10.1007/s10015-011-0951-7 ORIGINAL ARTICLE Ki Ho Yu Min Cheol Lee Jung Hun Heo Youn Geun Moon Localization algorithm using a virtual label for a mobile
Recovering Particle Diversity in a Rao-Blackwellized Particle Filter for SLAM After Actively Closing Loops
 Recovering Particle Diversity in a Rao-Blackwellized Particle Filter for SLAM After Actively Closing Loops Cyrill Stachniss University of Freiburg Department of Computer Science D-79110 Freiburg, Germany
Recovering Particle Diversity in a Rao-Blackwellized Particle Filter for SLAM After Actively Closing Loops Cyrill Stachniss University of Freiburg Department of Computer Science D-79110 Freiburg, Germany
Experimental Analysis of Dynamic Covariance Scaling for Robust Map Optimization Under Bad Initial Estimates
 Experimental Analysis of Dynamic Covariance Scaling for Robust Map Optimization Under Bad Initial Estimates Pratik Agarwal Giorgio Grisetti Gian Diego Tipaldi Luciano Spinello Wolfram Burgard Cyrill Stachniss
Experimental Analysis of Dynamic Covariance Scaling for Robust Map Optimization Under Bad Initial Estimates Pratik Agarwal Giorgio Grisetti Gian Diego Tipaldi Luciano Spinello Wolfram Burgard Cyrill Stachniss
Artificial Intelligence for Robotics: A Brief Summary
 Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
3D-Reconstruction of Indoor Environments from Human Activity
 3D-Reconstruction of Indoor Environments from Human Activity Barbara Frank Michael Ruhnke Maxim Tatarchenko Wolfram Burgard Abstract Observing human activities can reveal a lot about the structure of the
3D-Reconstruction of Indoor Environments from Human Activity Barbara Frank Michael Ruhnke Maxim Tatarchenko Wolfram Burgard Abstract Observing human activities can reveal a lot about the structure of the
Using LMS-100 Laser Rangefinder for Indoor Metric Map Building
 Using LMS-100 Laser Rangefinder for Indoor Metric Map Building János Rudan 1, Zoltán Tuza 1 and Gábor Szederkényi 1,2 1 Faculty of Information Technology, Pázmány Péter Catholic University H-1083 Budapest,
Using LMS-100 Laser Rangefinder for Indoor Metric Map Building János Rudan 1, Zoltán Tuza 1 and Gábor Szederkényi 1,2 1 Faculty of Information Technology, Pázmány Péter Catholic University H-1083 Budapest,
Grid-Based Models for Dynamic Environments
 Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
AN INDOOR SLAM METHOD BASED ON KINECT AND MULTI-FEATURE EXTENDED INFORMATION FILTER
 AN INDOOR SLAM METHOD BASED ON KINECT AND MULTI-FEATURE EXTENDED INFORMATION FILTER M. Chang a, b, Z. Kang a, a School of Land Science and Technology, China University of Geosciences, 29 Xueyuan Road,
AN INDOOR SLAM METHOD BASED ON KINECT AND MULTI-FEATURE EXTENDED INFORMATION FILTER M. Chang a, b, Z. Kang a, a School of Land Science and Technology, China University of Geosciences, 29 Xueyuan Road,
Appearance-based Concurrent Map Building and Localization
 Appearance-based Concurrent Map Building and Localization Josep M. Porta and Ben J.A. Kröse IAS Group, Informatics Institute, University of Amsterdam Kruislaan 403, 1098SJ, Amsterdam, The Netherlands {porta,krose}@science.uva.nl
Appearance-based Concurrent Map Building and Localization Josep M. Porta and Ben J.A. Kröse IAS Group, Informatics Institute, University of Amsterdam Kruislaan 403, 1098SJ, Amsterdam, The Netherlands {porta,krose}@science.uva.nl
Indoor Positioning System Based on Distributed Camera Sensor Networks for Mobile Robot
 Indoor Positioning System Based on Distributed Camera Sensor Networks for Mobile Robot Yonghoon Ji 1, Atsushi Yamashita 1, and Hajime Asama 1 School of Engineering, The University of Tokyo, Japan, t{ji,
Indoor Positioning System Based on Distributed Camera Sensor Networks for Mobile Robot Yonghoon Ji 1, Atsushi Yamashita 1, and Hajime Asama 1 School of Engineering, The University of Tokyo, Japan, t{ji,
Estimating Geospatial Trajectory of a Moving Camera
 Estimating Geospatial Trajectory of a Moving Camera Asaad Hakeem 1, Roberto Vezzani 2, Mubarak Shah 1, Rita Cucchiara 2 1 School of Electrical Engineering and Computer Science, University of Central Florida,
Estimating Geospatial Trajectory of a Moving Camera Asaad Hakeem 1, Roberto Vezzani 2, Mubarak Shah 1, Rita Cucchiara 2 1 School of Electrical Engineering and Computer Science, University of Central Florida,
Monocular Camera Localization in 3D LiDAR Maps
 Monocular Camera Localization in 3D LiDAR Maps Tim Caselitz Bastian Steder Michael Ruhnke Wolfram Burgard Abstract Localizing a camera in a given map is essential for vision-based navigation. In contrast
Monocular Camera Localization in 3D LiDAR Maps Tim Caselitz Bastian Steder Michael Ruhnke Wolfram Burgard Abstract Localizing a camera in a given map is essential for vision-based navigation. In contrast
A Genetic Algorithm for Simultaneous Localization and Mapping
 A Genetic Algorithm for Simultaneous Localization and Mapping Tom Duckett Centre for Applied Autonomous Sensor Systems Dept. of Technology, Örebro University SE-70182 Örebro, Sweden http://www.aass.oru.se
A Genetic Algorithm for Simultaneous Localization and Mapping Tom Duckett Centre for Applied Autonomous Sensor Systems Dept. of Technology, Örebro University SE-70182 Örebro, Sweden http://www.aass.oru.se
A visual bag of words method for interactive qualitative localization and mapping
 A visual bag of words method for interactive qualitative localization and mapping David FILLIAT ENSTA - 32 boulevard Victor - 7515 PARIS - France Email: david.filliat@ensta.fr Abstract Localization for
A visual bag of words method for interactive qualitative localization and mapping David FILLIAT ENSTA - 32 boulevard Victor - 7515 PARIS - France Email: david.filliat@ensta.fr Abstract Localization for
PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang
 PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang Project Goals The goal of this project was to tackle the simultaneous localization and mapping (SLAM) problem for mobile robots. Essentially, the
PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang Project Goals The goal of this project was to tackle the simultaneous localization and mapping (SLAM) problem for mobile robots. Essentially, the
Efficient Estimation of Accurate Maximum Likelihood Maps in 3D
 Efficient Estimation of Accurate Maximum Likelihood Maps in 3D Giorgio Grisetti Slawomir Grzonka Cyrill Stachniss Patrick Pfaff Wolfram Burgard Abstract Learning maps is one of the fundamental tasks of
Efficient Estimation of Accurate Maximum Likelihood Maps in 3D Giorgio Grisetti Slawomir Grzonka Cyrill Stachniss Patrick Pfaff Wolfram Burgard Abstract Learning maps is one of the fundamental tasks of
Introduction to Mobile Robotics. SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg
 Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg") Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Multi-Resolution Surfel Mapping and Real-Time Pose Tracking using a Continuously Rotating 2D Laser Scanner
 In Proceedings of 11th IEEE International Symposium on Safety, Security, and Rescue Robotics \\\(SSRR\\\), Linköping, Sweden, October 13. Multi-Resolution Surfel Mapping and Real-Time Pose Tracking using
In Proceedings of 11th IEEE International Symposium on Safety, Security, and Rescue Robotics \\\(SSRR\\\), Linköping, Sweden, October 13. Multi-Resolution Surfel Mapping and Real-Time Pose Tracking using
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Team Description Paper Team AutonOHM
 Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
ICRA 2016 Tutorial on SLAM. Graph-Based SLAM and Sparsity. Cyrill Stachniss
 ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
Simultaneous Localization and Mapping: Issues and Approaches
 International Journal of Computer Science and Telecommunications [Volume 4, Issue 7, July 2013] 1 ISSN 2047-3338 Simultaneous Localization and ping: Issues and Approaches Mohsen Mahrami, Md. Nazrul Islam
International Journal of Computer Science and Telecommunications [Volume 4, Issue 7, July 2013] 1 ISSN 2047-3338 Simultaneous Localization and ping: Issues and Approaches Mohsen Mahrami, Md. Nazrul Islam
Integrated Sensing Framework for 3D Mapping in Outdoor Navigation
 Integrated Sensing Framework for 3D Mapping in Outdoor Navigation R. Katz, N. Melkumyan, J. Guivant, T. Bailey, J. Nieto and E. Nebot ARC Centre of Excellence for Autonomous Systems Australian Centre for
Integrated Sensing Framework for 3D Mapping in Outdoor Navigation R. Katz, N. Melkumyan, J. Guivant, T. Bailey, J. Nieto and E. Nebot ARC Centre of Excellence for Autonomous Systems Australian Centre for
Analyzing the Quality of Matched 3D Point Clouds of Objects
 Analyzing the Quality of Matched 3D Point Clouds of Objects Igor Bogoslavskyi Cyrill Stachniss Abstract 3D laser scanners are frequently used sensors for mobile robots or autonomous cars and they are often
Analyzing the Quality of Matched 3D Point Clouds of Objects Igor Bogoslavskyi Cyrill Stachniss Abstract 3D laser scanners are frequently used sensors for mobile robots or autonomous cars and they are often