Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
|
|
|
- Jeremy Horn
- 5 years ago
- Views:
Transcription
1 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1
2 State Estimation Estimate the state of a system given observations and controls Goal: 2
3 Recursive Bayes Filter 1 Definition of the belief 3
4 Recursive Bayes Filter 2 Bayes rule 4
5 Recursive Bayes Filter 3 Markov assumption 5
6 Recursive Bayes Filter 4 Law of total probability 6
7 Recursive Bayes Filter 5 Markov assumption 7
8 Recursive Bayes Filter 6 Markov assumption 8
9 Recursive Bayes Filter 7 Recursive term 9
10 Prediction and Correction Step Bayes filter can be written as a two step process Prediction step Correction step 10
11 Motion and Observation Model Prediction step motion model Correction step sensor or observation model 11
12 Different Realizations The Bayes filter is a framework for recursive state estimation There are different realizations Different properties Linear vs. non-linear models for motion and observation models Gaussian distributions only? Parametric vs. non-parametric filters 12
13 In this Course Kalman filter & friends Gaussians Linear or linearized models Particle filter Non-parametric Arbitrary models (sampling required) 13
14 Motion Model 14


15 Robot Motion Models Robot motion is inherently uncertain How can we model this uncertainty? Courtesy: Thrun, Burgard, Fox 15
16 Probabilistic Motion Models Specifies a posterior probability that action u carries the robot from x to x. 16
17 Typical Motion Models In practice, one often finds two types of motion models: Odometry-based Velocity-based Odometry-based models for systems that are equipped with wheel encoders Velocity-based when no wheel encoders are available 17
18 Odometry Model Robot moves from to. Odometry information 18
19 Probability Distribution Noise in odometry Example: Gaussian noise 19
20 Examples (Odometry-Based) Courtesy: Thrun, Burgard, Fox 20
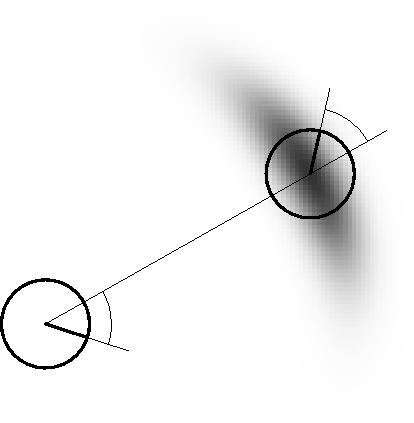
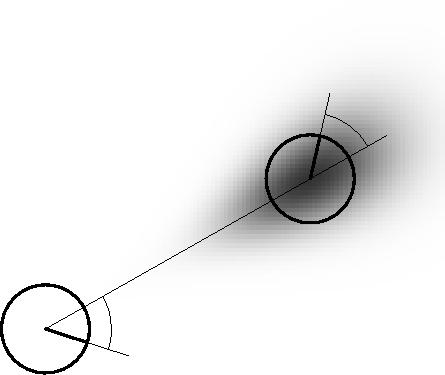
21 Velocity-Based Model -90 Courtesy: Thrun, Burgard, Fox 21
22 Motion Equation Robot moves from to. Velocity information 22
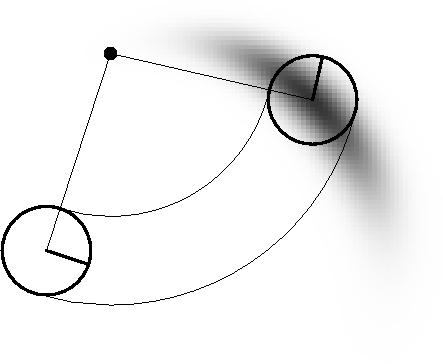
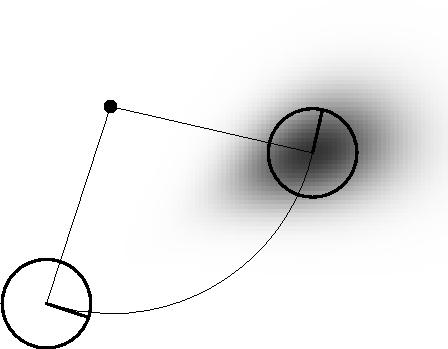
23 Problem of the Velocity-Based Model Robot moves on a circle The circle constrains the final orientation Fix: introduce an additional noise term on the final orientation 23
24 Motion Including 3 rd Parameter Term to account for the final rotation 24
25 Examples (Velocity-Based) Courtesy: Thrun, Burgard, Fox 25
26 Sensor Model 26
27 Model for Laser Scanners Scan z consists of K measurements. Individual measurements are independent given the robot position 27

28 Beam-Endpoint Model Courtesy: Thrun, Burgard, Fox 28

29 Beam-Endpoint Model map likelihood field Courtesy: N. Roy 29

30 Ray-cast Model Ray-cast model considers the first obstacle long the line of sight Mixture of four models 30
31 Model for Perceiving Landmarks with Range-Bearing Sensors Range-bearing Robot s pose Observation of feature j at location 31
32 Summary Bayes filter is a framework for state estimation Motion and sensor model are the central models in the Bayes filter Standard models for robot motion and laser-based range sensing 32
33 Literature On the Bayes filter Thrun et al. Probabilistic Robotics, Chapter 2 Course: Introduction to Mobile Robotics, Chapter 5 On motion and observation models Thrun et al. Probabilistic Robotics, Chapters 5 & 6 Course: Introduction to Mobile Robotics, Chapters 6 & 7 33
34 Slide Information These slides have been created by Cyrill Stachniss as part of the robot mapping course taught in 2012/13 and 2013/14. I created this set of slides partially extending existing material of Edwin Olson, Pratik Agarwal, and myself. I tried to acknowledge all people that contributed image or video material. In case I missed something, please let me know. If you adapt this course material, please make sure you keep the acknowledgements. Feel free to use and change the slides. If you use them, I would appreciate an acknowledgement as well. To satisfy my own curiosity, I appreciate a short notice in case you use the material in your course. My video recordings are available through YouTube: Cyrill Stachniss, 2014 cyrill.stachniss@igg.uni- 34
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Robot Mapping. Grid Maps. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Robot Mapping. A Short Introduction to Homogeneous Coordinates. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to Homogeneous Coordinates Gian Diego Tipaldi, Wolfram Burgard 1 Motivation Cameras generate a projected image of the world Euclidian geometry is suboptimal to describe
Robot Mapping A Short Introduction to Homogeneous Coordinates Gian Diego Tipaldi, Wolfram Burgard 1 Motivation Cameras generate a projected image of the world Euclidian geometry is suboptimal to describe
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Robot Mapping. Hierarchical Pose-Graphs for Online Mapping. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Hierarchical Pose-Graphs for Online Mapping Gian Diego Tipaldi, Wolfram Burgard 1 Graph-Based SLAM Measurements connect the poses of the robot while it is moving Measurements are inherently
Robot Mapping Hierarchical Pose-Graphs for Online Mapping Gian Diego Tipaldi, Wolfram Burgard 1 Graph-Based SLAM Measurements connect the poses of the robot while it is moving Measurements are inherently
ICRA 2016 Tutorial on SLAM. Graph-Based SLAM and Sparsity. Cyrill Stachniss
 ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM
 Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Localization, Mapping and Exploration with Multiple Robots. Dr. Daisy Tang
 Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Introduction to Mobile Robotics Probabilistic Motion Models
 Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? Dynamic
Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? Dynamic
Probabilistic Robotics
 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Introduction to Mobile Robotics SLAM Grid-based FastSLAM. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization. Wolfram Burgard
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Robot Mapping. Least Squares Approach to SLAM. Cyrill Stachniss
 Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Graphbased. Kalman filter. Particle filter. Three Main SLAM Paradigms. Robot Mapping. Least Squares Approach to SLAM. Least Squares in General
 Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM
 CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
AUTONOMOUS SYSTEMS. LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping
 AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
Monte Carlo Localization using Dynamically Expanding Occupancy Grids. Karan M. Gupta
 1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
7630 Autonomous Robotics Probabilities for Robotics
 7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
EKF Localization and EKF SLAM incorporating prior information
 EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang
 PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang Project Goals The goal of this project was to tackle the simultaneous localization and mapping (SLAM) problem for mobile robots. Essentially, the
PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang Project Goals The goal of this project was to tackle the simultaneous localization and mapping (SLAM) problem for mobile robots. Essentially, the
L15. POSE-GRAPH SLAM. NA568 Mobile Robotics: Methods & Algorithms
 L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping Feature-Based SLAM Filtering Problem: Motion Prediction
L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping Feature-Based SLAM Filtering Problem: Motion Prediction
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
SLAM: Robotic Simultaneous Location and Mapping
 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
Monte Carlo Localization for Mobile Robots
 Monte Carlo Localization for Mobile Robots Frank Dellaert 1, Dieter Fox 2, Wolfram Burgard 3, Sebastian Thrun 4 1 Georgia Institute of Technology 2 University of Washington 3 University of Bonn 4 Carnegie
Monte Carlo Localization for Mobile Robots Frank Dellaert 1, Dieter Fox 2, Wolfram Burgard 3, Sebastian Thrun 4 1 Georgia Institute of Technology 2 University of Washington 3 University of Bonn 4 Carnegie
Grid-Based Models for Dynamic Environments
 Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Markov Localization for Mobile Robots in Dynaic Environments
 Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Robot Mapping. Graph-Based SLAM with Landmarks. Cyrill Stachniss
 Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
Probabilistic Matching for 3D Scan Registration
 Probabilistic Matching for 3D Scan Registration Dirk Hähnel Wolfram Burgard Department of Computer Science, University of Freiburg, 79110 Freiburg, Germany Abstract In this paper we consider the problem
Probabilistic Matching for 3D Scan Registration Dirk Hähnel Wolfram Burgard Department of Computer Science, University of Freiburg, 79110 Freiburg, Germany Abstract In this paper we consider the problem
Practical Course WS 2010 Simultaneous Localization and Mapping
 Practical Course WS 2010 Simultaneous Localization and Mapping Cyrill Stachniss University of Freiburg, Germany Topics of this Course SLAM - simultaneous localization and mapping What does the world look
Practical Course WS 2010 Simultaneous Localization and Mapping Cyrill Stachniss University of Freiburg, Germany Topics of this Course SLAM - simultaneous localization and mapping What does the world look
AUTONOMOUS SYSTEMS. PROBABILISTIC LOCALIZATION Monte Carlo Localization
 AUTONOMOUS SYSTEMS PROBABILISTIC LOCALIZATION Monte Carlo Localization Maria Isabel Ribeiro Pedro Lima With revisions introduced by Rodrigo Ventura Instituto Superior Técnico/Instituto de Sistemas e Robótica
AUTONOMOUS SYSTEMS PROBABILISTIC LOCALIZATION Monte Carlo Localization Maria Isabel Ribeiro Pedro Lima With revisions introduced by Rodrigo Ventura Instituto Superior Técnico/Instituto de Sistemas e Robótica
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper
 USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper") Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Robust Monte-Carlo Localization using Adaptive Likelihood Models
 Robust Monte-Carlo Localization using Adaptive Likelihood Models Patrick Pfaff 1, Wolfram Burgard 1, and Dieter Fox 2 1 Department of Computer Science, University of Freiburg, Germany, {pfaff,burgard}@informatik.uni-freiburg.de
Robust Monte-Carlo Localization using Adaptive Likelihood Models Patrick Pfaff 1, Wolfram Burgard 1, and Dieter Fox 2 1 Department of Computer Science, University of Freiburg, Germany, {pfaff,burgard}@informatik.uni-freiburg.de
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps
 Lecture#06(Thursday September 11) Occupancy Maps") Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Announcements. Recap Landmark based SLAM. Types of SLAM-Problems. Occupancy Grid Maps. Grid-based SLAM. Page 1. CS 287: Advanced Robotics Fall 2009
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Robot Mapping. TORO Gradient Descent for SLAM. Cyrill Stachniss
 Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping
 Lecture#05 (Wednesday, September 12) Mapping") Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Robot Mapping. Graph-Based SLAM with Landmarks. Cyrill Stachniss
 Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
CSE-571 Robotics. Sensors for Mobile Robots. Beam-based Sensor Model. Proximity Sensors. Probabilistic Sensor Models. Beam-based Scan-based Landmarks
 Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
Monte Carlo Localization
 Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Particle Filter Localization
 E190Q Autonomous Mobile Robots Lab 4 Particle Filter Localization INTRODUCTION Determining a robots position in a global coordinate frame is one of the most important and difficult problems to overcome
E190Q Autonomous Mobile Robots Lab 4 Particle Filter Localization INTRODUCTION Determining a robots position in a global coordinate frame is one of the most important and difficult problems to overcome
Introduction to Mobile Robotics Techniques for 3D Mapping
 Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Implementation of Odometry with EKF for Localization of Hector SLAM Method
 Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
CVPR 2014 Visual SLAM Tutorial Efficient Inference
 CVPR 2014 Visual SLAM Tutorial Efficient Inference kaess@cmu.edu The Robotics Institute Carnegie Mellon University The Mapping Problem (t=0) Robot Landmark Measurement Onboard sensors: Wheel odometry Inertial
CVPR 2014 Visual SLAM Tutorial Efficient Inference kaess@cmu.edu The Robotics Institute Carnegie Mellon University The Mapping Problem (t=0) Robot Landmark Measurement Onboard sensors: Wheel odometry Inertial
RoboCup Rescue Summer School Navigation Tutorial
 RoboCup Rescue Summer School 2012 Institute for Software Technology, Graz University of Technology, Austria 1 Literature Choset, Lynch, Hutchinson, Kantor, Burgard, Kavraki and Thrun. Principle of Robot
RoboCup Rescue Summer School 2012 Institute for Software Technology, Graz University of Technology, Austria 1 Literature Choset, Lynch, Hutchinson, Kantor, Burgard, Kavraki and Thrun. Principle of Robot
A New Omnidirectional Vision Sensor for Monte-Carlo Localization
 A New Omnidirectional Vision Sensor for Monte-Carlo Localization E. Menegatti 1, A. Pretto 1, and E. Pagello 12 1 Intelligent Autonomous Systems Laboratory Department of Information Engineering The University
A New Omnidirectional Vision Sensor for Monte-Carlo Localization E. Menegatti 1, A. Pretto 1, and E. Pagello 12 1 Intelligent Autonomous Systems Laboratory Department of Information Engineering The University
Efficient Failure Detection for Mobile Robots Using Mixed-Abstraction Particle Filters
 Efficient Failure Detection for Mobile Robots Using Mixed-Abstraction Particle Filters Christian Plagemann, Cyrill Stachniss, and Wolfram Burgard University of Freiburg Georges-Koehler-Allee 7911 Freiburg,
Efficient Failure Detection for Mobile Robots Using Mixed-Abstraction Particle Filters Christian Plagemann, Cyrill Stachniss, and Wolfram Burgard University of Freiburg Georges-Koehler-Allee 7911 Freiburg,
Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots
 Lecture#05 (Monday, January 26) Lecturer: Byron Boots") Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots Mapping 1 Occupancy Mapping When solving the localization problem, we had a map of the world and tried
Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots Mapping 1 Occupancy Mapping When solving the localization problem, we had a map of the world and tried
Introduction to Multi-Agent Programming
 Introduction to Multi-Agent Programming 6. Cooperative Sensing Modeling Sensors, Kalman Filter, Markov Localization, Potential Fields Alexander Kleiner, Bernhard Nebel Contents Introduction Modeling and
Introduction to Multi-Agent Programming 6. Cooperative Sensing Modeling Sensors, Kalman Filter, Markov Localization, Potential Fields Alexander Kleiner, Bernhard Nebel Contents Introduction Modeling and
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS. Oliver Wulf, Bernardo Wagner
 USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
Introduction to robot algorithms CSE 410/510
 Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Tracking Multiple Moving Objects with a Mobile Robot
 Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
Robotic Mapping. Outline. Introduction (Tom)
") Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Fox, Burgard & Thrun problem they attack. Tracking or local techniques aim at compensating odometric errors occurring during robot navigation. They re
 Journal of Artificial Intelligence Research 11 (1999) 391-427 Submitted 1/99; published 11/99 Markov Localization for Mobile Robots in Dynamic Environments Dieter Fox Computer Science Department and Robotics
Journal of Artificial Intelligence Research 11 (1999) 391-427 Submitted 1/99; published 11/99 Markov Localization for Mobile Robots in Dynamic Environments Dieter Fox Computer Science Department and Robotics
Localization of Multiple Robots with Simple Sensors
 Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 2005 Localization of Multiple Robots with Simple Sensors Mike Peasgood and Christopher Clark Lab
Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 2005 Localization of Multiple Robots with Simple Sensors Mike Peasgood and Christopher Clark Lab
Robust Monte Carlo Localization for Mobile Robots
 To appear in Artificial Intelligence, Summer 2001 Robust Monte Carlo Localization for Mobile Robots Sebastian Thrun, Dieter Fox y, Wolfram Burgard z, and Frank Dellaert School of Computer Science, Carnegie
To appear in Artificial Intelligence, Summer 2001 Robust Monte Carlo Localization for Mobile Robots Sebastian Thrun, Dieter Fox y, Wolfram Burgard z, and Frank Dellaert School of Computer Science, Carnegie
Obstacle Avoidance (Local Path Planning)
") Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Today MAPS AND MAPPING. Features. process of creating maps. More likely features are things that can be extracted from images:
 MAPS AND MAPPING Features In the first class we said that navigation begins with what the robot can see. There are several forms this might take, but it will depend on: What sensors the robot has What
MAPS AND MAPPING Features In the first class we said that navigation begins with what the robot can see. There are several forms this might take, but it will depend on: What sensors the robot has What
UNIVERSITÀ DEGLI STUDI DI GENOVA MASTER S THESIS
 UNIVERSITÀ DEGLI STUDI DI GENOVA MASTER S THESIS Integrated Cooperative SLAM with Visual Odometry within teams of autonomous planetary exploration rovers Author: Ekaterina Peshkova Supervisors: Giuseppe
UNIVERSITÀ DEGLI STUDI DI GENOVA MASTER S THESIS Integrated Cooperative SLAM with Visual Odometry within teams of autonomous planetary exploration rovers Author: Ekaterina Peshkova Supervisors: Giuseppe
Mobile Robot Mapping and Localization in Non-Static Environments
 Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Adapting Navigation Strategies Using Motions Patterns of People
 Adapting Navigation Strategies Using Motions Patterns of People Maren Bennewitz and Wolfram Burgard Department of Computer Science University of Freiburg, Germany Sebastian Thrun School of Computer Science
Adapting Navigation Strategies Using Motions Patterns of People Maren Bennewitz and Wolfram Burgard Department of Computer Science University of Freiburg, Germany Sebastian Thrun School of Computer Science
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING
 CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING By Michael Lowney Senior Thesis in Electrical Engineering University of Illinois at Urbana-Champaign Advisor: Professor Minh Do May 2015
CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING By Michael Lowney Senior Thesis in Electrical Engineering University of Illinois at Urbana-Champaign Advisor: Professor Minh Do May 2015
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Humanoid Robotics. Least Squares. Maren Bennewitz
 Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
ME 456: Probabilistic Robotics
 ME 456: Probabilistic Robotics Week 5, Lecture 2 SLAM Reading: Chapters 10,13 HW 2 due Oct 30, 11:59 PM Introduction In state esemaeon and Bayes filter lectures, we showed how to find robot s pose based
ME 456: Probabilistic Robotics Week 5, Lecture 2 SLAM Reading: Chapters 10,13 HW 2 due Oct 30, 11:59 PM Introduction In state esemaeon and Bayes filter lectures, we showed how to find robot s pose based
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: