PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang
|
|
|
- Morris Thompson
- 5 years ago
- Views:
Transcription
1 PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang Project Goals The goal of this project was to tackle the simultaneous localization and mapping (SLAM) problem for mobile robots. Essentially, the SLAM problem is borrowed from the robotics domain, in which it is often applied to situations in which a mobile robot is operating in an unknown environment that it attempts to map by navigating and sensing obstacles using (generally) a laser range finder. The difficulty lies in that both the odometry and range finder readings are noisy. We chose the Berkeley Pac-Man projects as the basic framework to test our solutions to SLAM. Additionally some tests were also carried out on real data collected from a four wheeled mobile robot equipped with the necessary sensors. In order to solve SLAM in the Pac-Man domain, we had to first modify the framework such to fit the problem; i.e., by simulating a laser range finder and noisy odometry. We then implemented a variety of SLAM algorithms, modifying them slightly where appropriate in order to make them more suitable to the Pac-Man environment. System Design For the SLAM framework, the primary design goals were to integrate nicely with the existing Pac-Man framework, and also to provide easy extensibility and configurability. We ended up adding the following classes: RangeFinder: This class modelled a laser range finder. It is instantiated with three parameters: the standard deviation of the noise added to the distance reading of each ray, the field of view, and the number of rays. The rays are distributed evenly across the field of view. The class provides a method for getting the directions of every ray given the direction the range finder is facing, and a method that returns a noisy distance reading for each ray given the position and direction of the range finder and the location of all obstacles that block rays. This is stored in the Grid class used elsewhere in the Pac-Man framework, and in practice this was always just the wall locations, but it would be trivial to include ghosts or food in this obstacle matrix. MotionModel: This is essentially a data class which encodes the nature of the noise in Pac-Man s motion model. It uses the Actions.Directions enum in order to integrate well, and for configurability it encodes the motion model as a dictionary that maps from intended actions to Counter objects which store a set of possible resulting actions and the probability that those actions will result from the intended action. The resulting actions
2 can even be lists of actions, allowing, for example, for Pac-Man to move forward two grid squares when attempting a forward motion of one square. SlamAgent: This follows the pattern of the other Pac-Man playing agents, implementing the necessary methods to allow you to play Pac-Man with a SLAM agent using -p SlamAgent. On each time step, when the game queries the agent for its next action, it allows for specific implementations of the SLAM agent to update internal state based on current observations. For the actual implementation of various SLAM algorithms, we use a modular approach, and currently have three SLAM modules: dpslam: DP-SLAM, as introduced in [1], refers to an efficient method of allowing each particle its own map by storing changes made by individual particles in a global map using balanced trees rooted at each grid square. The rest is standard SLAM techniques. fastslam: FAST-SLAM, as introduced in [3], factors the full posterior over the pose of the robot and the surroundings into the product of a conditional distribution of the robot s pose and the locations of the landmarks (the environment is represented by a set of discrete landmarks). The conditional distributions are estimated with Extended Kalman Filter (EKF). The particle filter approach is employed to inference the posterior. Each particle stores the pose of the robot and the mapping of the landmarks. The complexity of FAST-SLAM is n(mn), where M is the number of partiles and N is the number of landmarks. gridslam: GRID-SLAM, as introduced in [2], is a rao-blackwellized particle filter approach to solving SLAM using grid maps. Each particle has a map of its own and represents a possible trajectory for the robot. Two key improvements suggested are: Accurate sampling of particles by combining information from the motion model and by matching observations Adaptive re-sampling Due to the highly accurate sampling stage, GRID-SLAM generally uses an order of magnitude lesser number of particles compared to conventional SLAM algorithms. The velocity motion model from [4] was implemented as the odometry model for the robot. GRID-SLAM was also implemented on real data collected from a mobile robot (data collected for ESE-650: Learning in Robotics course at the University of Pennsylvania). The robot was equipped with a Hokuyo Laser scanner, an IMU, Gyro and Wheel encoders. The test environments consisted of indoor hallways with ramps (upto 25 degree pitch). The Laser scanner was at a fixed height above the ground, pointing straight ahead with a FOV of 270 degrees. Some infrastructure from a previous project was re-used: UKF for orientation tracking: An Unscented Kalman filter was implemented for computing & tracking the 3D orientation of the robot given IMU and Gyro data. A few helper functions were also used Scan Matching: Code for matching a new observation (laser scan) to an existing map

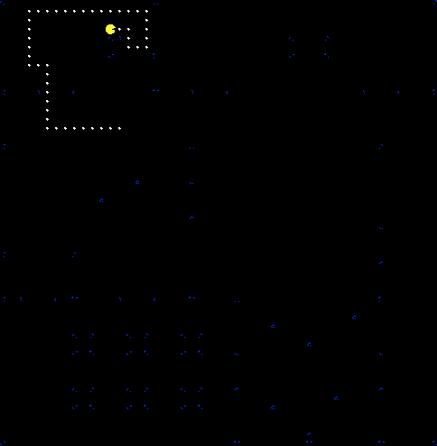
3 Results DP-SLAM: We were able to successfully implement DP-SLAM in the Pac-Man framework. The accuracy of the maps generated depends on the number of particles, the noise in the range finder model, and the motion model. In testing, we used a motion model in which Pac-Man moved in his intended direction with 80% probability and did not move with 20% probability, and a typical range finder noise model had a standard deviation of 0.1 grid squares from the actual distance. Despite the relatively simple model, the algorithm required a somewhat surprising number of particles to work well; as you can see in figure 2, on very large maps, the map would deviate slightly from ground truth even with 25 particles. Of course, increasing the number of particles incurs a runtime penalty, which is characterized in figure 3. Figure 1: A typical display for PacSLAM. The ground-truth map and Pac-Man state are shown on left, and the agent s belief about the map and its position in the map are on the right. Unknown squares are shown in dark blue, free squares are light blue, occupied squares are yellow, and Pac-Man is the red dot.

 25 025")
4 Figure 2: (top left) 5 particles, σ = 0.1 (top middle) 25 particles, σ = 0.1 (top right) 25 particles, σ = (bottom) ground truth.
5 Figure 2 gives a good qualitative overview of the effect of the number of particles on the resulting maps. The top left shows what happens when there are an insufficient number of particles to deal with the noise in the readings. Comparing the top left and top middle maps shows how increasing the number of particles can drastically improve map quality, and comparing the top middle and top right maps shows how decreasing the level of noise in the range finder readings can further improve accuracy, yielding a nearly perfect map. Figure 3: The effect of the number of particles used by DP-SLAM on runtime. Note that this plot lists the number of particles generated on each update, not the number of particles in use. The number of particles in use is variable, but when N particles are generated at each step, there are at most 2N-1 particles stored. FAST-SLAM FAST-SLAM was implemented under the Pacman framework who is able to localize itself and map the surrounding, with noisy observation and a probabilistic motion model mentioned in the DP-SLAM part. The fastslam Agent was tested on the openslam. lay as in Figure 4.1, and bigtestslam.lay as in Figure 5. For the smalltest in Figure 4, particles are needed to obtain an acceptable map. The accuracy is evaluated using the Dice coefficient; the run time was recorded with a 3.1GHz CPU.


6 Figure 4.1Test result using openslam.layout. 15 particles were used and accuracy 76% Figure 4.2: With the smalltestslam layout shown in Figure 4.1, the impact of the number of particles on accuracy and and runtime


7 Figure 5. Test with bigtestslam.lay. 15 particles, accuracy: 74% Remark: One of the innate drawback of the FAST-SLAM is the difficulty in resolving data association since it uses discrete set of landmarks to represent the surrounding. During the test, this disadvantage led to a result that the accuracy does not necessarily increase with higher resolution of observation. This is because if the resolution of observation is very high, the density of the measurement of the landmark will be highly overlapping, which increase the difficulty resolving the data association. This is shown in Figure 6 Figure 6. Using the openslam.layout, 15 particles, the number of readings per 180 degree ranges from 11 to 97, which means a resolution ranging from 1.88 to 18. The accuracy reaches the peak at 25 readings per 180, then decrease, due to the data association problem
.")
8 GRID-SLAM: GRID-SLAM was successfully implemented in the Pac-Man framework and the real data as well. We tested the algorithm under similar conditions as DP-SLAM (on a similar map, with the same motion model & rangefinder noise). Due to the highly discrete nature of the Pac-Man world and known motion models, sampling particles by integrating information from both results in highly accurate tracking. Thus, GRID-SLAM can work well with just a single particle. Results on the environment from Figure 2 are shown below in Figure 6. Of course, if one did not assume knowledge of the motion model and assumed a uniform prior among the neighbouring states, many more particles would be needed for accurate results. When tested under such a scenario, GRID-SLAM fails due to the highly discrete nature of the environment, which causes multiple locations to look similar during scanmatching. A better way to solve the matching may improve results here. In case of real data, GRID-SLAM works reasonably to generate a map of the environment. More particles are needed here due to the continuous nature of the problem. Results on two datasets with 5 particles are shown in Figure 7. Increasing the number of particles should theoretically improve the accuracy of the estimation, though the maps look quite similar. Execution time is linear in the number of particles used.
9 Figure 6: Grid-SLAM performance on the map from figure 2. Note the 100% accuracy. Figure 7: GRID-SLAM performance on two real world datasets. Results using 5 particles. Map created by particle with highest weight shown Environment on the right has ramps. Surprises Probably the biggest surprise when developing PacSLAM was the effect of the coarse discretization of the Pac-Man world. Whereas we initially expected this to make solving the SLAM problem easier, it actually made some things much more challenging. For example, the fact that the Pac-Man world is already a perfect grid would seem to be perfect for grid-based mapping approaches, but in fact, a noisy sensor reading of a wall will have only about a 50% probability of landing in the grid square that actually is the wall and about a 50% probability of landing in the grid square right in front of that (we accounted for this by computing the most likely generator of a noisy sensor reading based on both the position and direction of the reading). Also, it made multiple positions look similar from the scan matching perspective. Another surprise was the fact that it is extremely important that you always have at least one particle that has the correct estimated pose and direction and a mostly correct estimated map. This is because, due to the high degree of uncertainty in the problem, the algorithms tended not to degrade gracefully but fail in rather extreme ways whenever a failure occurred. Thus, given a reasonable noise model, the number of particles required for DP-SLAM to maintain accurate tracking was often high enough to cause surprisingly slow performance. In the case of the real world data, the biggest surprise was the effect of pitch on the map estimation (environment in figure 7). As the robot went up/came down the ramp, the rangefinder began to see ceilings and walls. As this looked similar to the wall at the ends of the hallway, scan-matching began to result in spurious position estimates which caused the algorithm to fail. To solve this, we decided to trust only the motion model estimate in case the pitch was beyond
. Another issue due to the presence of ramps was the fact that the motion was no longer planar.")
10 a certain threshold (0.2 radians). In practice, this resulted in much nicer looking maps and better tracking. Figure 8 shows a map with no pitch thresholding (compare with the map shown in Figure 7 - right). Another issue due to the presence of ramps was the fact that the motion was no longer planar. The velocity motion model in [4] assumes that the motion is planar. Incorporating the pitch into this was a challenge. While this works presently, it is to be seen how better we can improve the motion model in the future. Conclusions and Future Work Though we originally planned to do some comparison of the three algorithms implemented, this turned out to be more challenging than anticipated, for a number of reasons. First of all, evaluating map accuracy is quite tricky. One could imagine simply comparing the number of grid squares that are correct, but a common failure mode is for regions of the computed map to be shifted by one or two grid squares relative to another region, which would score poorly using such a metric despite being quite close to ground truth. Furthermore, the evaluation would depend on whether the goal was mapping, i.e. generating an accurate map, or localization, i.e. generating an accurate trajectory, or some weighted combination of the two. Also, the performance on each algorithm depends on a large number of factors, including the properties of the map, the FOV, number of rays, and noise level of the range finder, the nature of the noise in the motion model, and algorithm-specific parameters such as the number of particles used, etc. Therefore one algorithm may perform better than the others on some settings of the aforementioned parameters, but not on others. Finally, some of the algorithms turned out to be more amenable to the Pac-Man world than others, and nearly all were modified from their original forms to cope with the nature of the problem, so the comparison may not in fact be that useful. While we were thus unable to perform a quantitative analysis of the relative performance of the algorithms, we were able to characterize the individual algorithms as discussed in the results section.
11 Figure 8: GRID-SLAM performance on the environment in Figure 7 - Right with no pitch thresholding. LIDAR scan matching is done all the time irrespective of robot s pitch. Robot underestimates distance to far wall on the center-left side of map due to a ramp s presence which causes false wall readings As for future work, there are a number of interesting extensions that could readily be applied to the PacSLAM framework we developed, including: Ghost Tracking: Rather than just building empty maps, we could attempt to track ghosts using noisy range finder readings as well. This could be done somewhat trivially by having the range finder return the class of object that stopped the ray ( where class [ ghost, wall ] ), but could be done more interestingly by not differentiating the two, and having particles include ghost positions along with Pac-Man positions and maps as. The difficulty would lie in distinguishing moving obstacles from walls that seem to move due to noisy readings, but by tracking through multiple time steps, it should be possible. Automated Map Exploration: Currently, Pac-Man can only build a map using human direction through the SlamKeyboardAgent. However, it would be interesting to formulate PacSLAM as a search problem in which Pac-Man attempts to map his entire environment subject to some evaluation function, perhaps on the amount of steps he takes, and have the agent plan accordingly. Maximum Distance for Range Finder: In the current implementation, the laser range finder model will return a noisy reading of any distance, no matter the magnitude. This is unrealistic, as in real-world scenarios, there is a maximum distance. It would be interesting to see what the effects of imposing a maximum distance reading would be in the Pac-Man world, effectively increasing ambiguity for situations such as wide open areas or long hallways. For the real world data as well, there are a few interesting areas for improvement: Loop Closure: Currently, the implemented algorithm does not have any special cases to check for loop closure. Detecting when a loop closure happens and using the additional constraints to improve the map estimation should help improve the accuracy of the algorithm Improved Motion model: As mentioned before, improving the motion model to produce better estimates nonplanar estimates of motion based on the pitch & roll will also improve performance Ceiling/Floor detection: A convenient way to detect the ceiling and floors when the robot is on a ramp would help us use the LIDAR data at all times, improving scan matching Scan Matching: The current scan matching algorithm matches the map to the observation given a list of probable positions and returns the one with the highest probability. Gradient descent along the observation likelihood coupled with raytracing the map to find free cells should
12 improve accuracy References [1] Austin Eliazar and Ronald Parr DP-SLAM: fast, robust simultaneous localization and mapping without predetermined landmarks. In Proceedings of the 18th international joint conference on Artificial intelligence (IJCAI'03). Morgan Kaufmann Publishers Inc., San Francisco, CA, USA, [2] Giorgio Grisetti, Cyrill Stachniss, Wolfram Burgard Improved Techniques for Grid Mapping with Rao-Blackwellized Particle Filters. IEEE Transactions on Robotics. [3] Michael Montemerlo, Sebastian Thrun, Daphne Koller and Ben Wegbreit FastSLAM: a factored solution to the Simultaneous Localization and Mapping problem. In Proceedings of the AAAI National Conference on Artificial Intelligence. [4] Sebastian Thrun, Wolfram Burgard, Dieter Fox Probabilistic Robotics. MIT Press. Work split-up: Appendices GRID-SLAM on Pac-Man and real world data - Arunkumar Byravan DP-SLAM & PacSLAM framework - Tanner Schmidt FAST-SLAM on Pac-Man - Erzhuo Wang Externally-written code: The PacSLAM framework is based on the Pac-Man projects from UC Berkeley. Code written for ESE650 - Learning in Robotics course at the University of Pennsylvania ( has been re-used for implementing GRID- SLAM on the real world data. Details are explained in the report. The three SLAM algorithms are implemented based on ideas proposed in their respective papers as cited in this report. The red-black tree was implemented by borrowing from code at red-black-tree/. Running PacSLAM: There are two implemented options for running PacSLAM. The first is by adding the argument -p SlamKeyboardAgent and the second is using -p SlamTestAgent. The former allows you to control Pac-Man as normal as he maps, and the second will control Pac-Man such
13 that he follows a trail of food particles. This is for use with maps smalltestslam.lay and bigtestslam.lay. The slam module is set using -a slammodule=[dpslam fastslam gridslam], and the motion model is set using -a motionmodeltype=[ DeterminisiticModel NoisyStoppingModel NoisyTurningModel ]. Running GRID-SLAM on real data: MATLAB code along with the datasets are attached in the submission. A README file explaining the options is also attached.
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Introduction to Mobile Robotics SLAM Grid-based FastSLAM. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Kaijen Hsiao. Part A: Topics of Fascination
 Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements. Recap Landmark based SLAM. Types of SLAM-Problems. Occupancy Grid Maps. Grid-based SLAM. Page 1. CS 287: Advanced Robotics Fall 2009
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Mobile Robot Mapping and Localization in Non-Static Environments
 Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM
 Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Implementation of Odometry with EKF for Localization of Hector SLAM Method
 Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper
 USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper") Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Building Reliable 2D Maps from 3D Features
 Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
SLAM: Robotic Simultaneous Location and Mapping
 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Introduction to robot algorithms CSE 410/510
 Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Robot Mapping. Grid Maps. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
AN INCREMENTAL SLAM ALGORITHM FOR INDOOR AUTONOMOUS NAVIGATION
 20th IMEKO TC4 International Symposium and 18th International Workshop on ADC Modelling and Testing Research on Electric and Electronic Measurement for the Economic Upturn Benevento, Italy, September 15-17,
20th IMEKO TC4 International Symposium and 18th International Workshop on ADC Modelling and Testing Research on Electric and Electronic Measurement for the Economic Upturn Benevento, Italy, September 15-17,
How to Learn Accurate Grid Maps with a Humanoid
 How to Learn Accurate Grid Maps with a Humanoid Cyrill Stachniss Maren Bennewitz Giorgio Grisetti Sven Behnke Wolfram Burgard Abstract Humanoids have recently become a popular research platform in the
How to Learn Accurate Grid Maps with a Humanoid Cyrill Stachniss Maren Bennewitz Giorgio Grisetti Sven Behnke Wolfram Burgard Abstract Humanoids have recently become a popular research platform in the
A Unified 3D Mapping Framework using a 3D or 2D LiDAR
 A Unified 3D Mapping Framework using a 3D or 2D LiDAR Weikun Zhen and Sebastian Scherer Abstract Simultaneous Localization and Mapping (SLAM) has been considered as a solved problem thanks to the progress
A Unified 3D Mapping Framework using a 3D or 2D LiDAR Weikun Zhen and Sebastian Scherer Abstract Simultaneous Localization and Mapping (SLAM) has been considered as a solved problem thanks to the progress
NERC Gazebo simulation implementation
 NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Using the ikart mobile platform
 Using the mobile platform Marco Randazzo Sestri Levante, July 23th, 2012 General description A holonomic mobile base for icub: Omnidirectional movement (six omnidirectional wheels) Integrates an high-performance
Using the mobile platform Marco Randazzo Sestri Levante, July 23th, 2012 General description A holonomic mobile base for icub: Omnidirectional movement (six omnidirectional wheels) Integrates an high-performance
PML-SLAM: a solution for localization in large-scale urban environments
 PML-SLAM: a solution for localization in large-scale urban environments Zayed Alsayed, Guillaume Bresson, Fawzi Nashashibi and Anne Verroust-Blondet Institut VEDECOM Versailles, France firstname.name@vedecom.fr
PML-SLAM: a solution for localization in large-scale urban environments Zayed Alsayed, Guillaume Bresson, Fawzi Nashashibi and Anne Verroust-Blondet Institut VEDECOM Versailles, France firstname.name@vedecom.fr
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Fast and Accurate SLAM with Rao-Blackwellized Particle Filters
 Fast and Accurate SLAM with Rao-Blackwellized Particle Filters Giorgio Grisetti a,b Gian Diego Tipaldi b Cyrill Stachniss c,a Wolfram Burgard a Daniele Nardi b a University of Freiburg, Department of Computer
Fast and Accurate SLAM with Rao-Blackwellized Particle Filters Giorgio Grisetti a,b Gian Diego Tipaldi b Cyrill Stachniss c,a Wolfram Burgard a Daniele Nardi b a University of Freiburg, Department of Computer
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM
 CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
Localization, Mapping and Exploration with Multiple Robots. Dr. Daisy Tang
 Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Maritime UAVs Swarm Intelligent Robot Modelling and Simulation using Accurate SLAM method and Rao Blackwellized Particle Filters
 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Maritime UAVs Swarm Intelligent Robot Modelling and Simulation using Accurate
20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Maritime UAVs Swarm Intelligent Robot Modelling and Simulation using Accurate
Proceedings of the 2016 Winter Simulation Conference T. M. K. Roeder, P. I. Frazier, R. Szechtman, E. Zhou, T. Huschka, and S. E. Chick, eds.
 Proceedings of the 2016 Winter Simulation Conference T. M. K. Roeder, P. I. Frazier, R. Szechtman, E. Zhou, T. Huschka, and S. E. Chick, eds. SIMULATION RESULTS FOR LOCALIZATION AND MAPPING ALGORITHMS
Proceedings of the 2016 Winter Simulation Conference T. M. K. Roeder, P. I. Frazier, R. Szechtman, E. Zhou, T. Huschka, and S. E. Chick, eds. SIMULATION RESULTS FOR LOCALIZATION AND MAPPING ALGORITHMS
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Grid-Based Models for Dynamic Environments
 Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
PROGRAMA DE CURSO. Robotics, Sensing and Autonomous Systems. SCT Auxiliar. Personal
 PROGRAMA DE CURSO Código Nombre EL7031 Robotics, Sensing and Autonomous Systems Nombre en Inglés Robotics, Sensing and Autonomous Systems es Horas de Horas Docencia Horas de Trabajo SCT Docentes Cátedra
PROGRAMA DE CURSO Código Nombre EL7031 Robotics, Sensing and Autonomous Systems Nombre en Inglés Robotics, Sensing and Autonomous Systems es Horas de Horas Docencia Horas de Trabajo SCT Docentes Cátedra
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
DP-SLAM: Fast, Robust Simultaneous Localization and Mapping Without Predetermined Landmarks
 DP-SLAM: Fast, Robust Simultaneous Localization and Mapping Without Predetermined Landmarks Austin Eliazar and Ronald Parr Department of Computer Science Duke University {eliazar, parr} @cs.duke.edu Abstract
DP-SLAM: Fast, Robust Simultaneous Localization and Mapping Without Predetermined Landmarks Austin Eliazar and Ronald Parr Department of Computer Science Duke University {eliazar, parr} @cs.duke.edu Abstract
arxiv: v1 [cs.ro] 18 Jul 2016
![arxiv: v1 [cs.ro] 18 Jul 2016](/thumbs/94/121895554.jpg "arxiv: v1 [cs.ro] 18 Jul 2016") GENERATIVE SIMULTANEOUS LOCALIZATION AND MAPPING (G-SLAM) NIKOS ZIKOS AND VASSILIOS PETRIDIS arxiv:1607.05217v1 [cs.ro] 18 Jul 2016 Abstract. Environment perception is a crucial ability for robot s interaction
GENERATIVE SIMULTANEOUS LOCALIZATION AND MAPPING (G-SLAM) NIKOS ZIKOS AND VASSILIOS PETRIDIS arxiv:1607.05217v1 [cs.ro] 18 Jul 2016 Abstract. Environment perception is a crucial ability for robot s interaction
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
LOAM: LiDAR Odometry and Mapping in Real Time
 LOAM: LiDAR Odometry and Mapping in Real Time Aayush Dwivedi (14006), Akshay Sharma (14062), Mandeep Singh (14363) Indian Institute of Technology Kanpur 1 Abstract This project deals with online simultaneous
LOAM: LiDAR Odometry and Mapping in Real Time Aayush Dwivedi (14006), Akshay Sharma (14062), Mandeep Singh (14363) Indian Institute of Technology Kanpur 1 Abstract This project deals with online simultaneous
EKF Localization and EKF SLAM incorporating prior information
 EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
An Embedded Particle Filter SLAM implementation using an affordable platform
 An Embedded Particle Filter SLAM implementation using an affordable platform Martin Llofriu 1,2, Federico Andrade 1, Facundo Benavides 1, Alfredo Weitzenfeld 2 and Gonzalo Tejera 1 1 Instituto de Computación,
An Embedded Particle Filter SLAM implementation using an affordable platform Martin Llofriu 1,2, Federico Andrade 1, Facundo Benavides 1, Alfredo Weitzenfeld 2 and Gonzalo Tejera 1 1 Instituto de Computación,
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
DEALING WITH SENSOR ERRORS IN SCAN MATCHING FOR SIMULTANEOUS LOCALIZATION AND MAPPING
 Inženýrská MECHANIKA, roč. 15, 2008, č. 5, s. 337 344 337 DEALING WITH SENSOR ERRORS IN SCAN MATCHING FOR SIMULTANEOUS LOCALIZATION AND MAPPING Jiří Krejsa, Stanislav Věchet* The paper presents Potential-Based
Inženýrská MECHANIKA, roč. 15, 2008, č. 5, s. 337 344 337 DEALING WITH SENSOR ERRORS IN SCAN MATCHING FOR SIMULTANEOUS LOCALIZATION AND MAPPING Jiří Krejsa, Stanislav Věchet* The paper presents Potential-Based
Mapping Contoured Terrain Using SLAM with a Radio- Controlled Helicopter Platform. Project Proposal. Cognitive Robotics, Spring 2005
 Mapping Contoured Terrain Using SLAM with a Radio- Controlled Helicopter Platform Project Proposal Cognitive Robotics, Spring 2005 Kaijen Hsiao Henry de Plinval Jason Miller Introduction In the context
Mapping Contoured Terrain Using SLAM with a Radio- Controlled Helicopter Platform Project Proposal Cognitive Robotics, Spring 2005 Kaijen Hsiao Henry de Plinval Jason Miller Introduction In the context
Matching Evaluation of 2D Laser Scan Points using Observed Probability in Unstable Measurement Environment
 Matching Evaluation of D Laser Scan Points using Observed Probability in Unstable Measurement Environment Taichi Yamada, and Akihisa Ohya Abstract In the real environment such as urban areas sidewalk,
Matching Evaluation of D Laser Scan Points using Observed Probability in Unstable Measurement Environment Taichi Yamada, and Akihisa Ohya Abstract In the real environment such as urban areas sidewalk,
Adapting the Sample Size in Particle Filters Through KLD-Sampling
 Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
model: P (o s ) 3) Weights each new state according to a Markovian observation
 3) Weights each new state according to a Markovian observation") DP-SLAM 2.0 Austin I. Eliazar and Ronald Parr Department of Computer Science Duke University Durham, North Carolina 27708 Email: {eliazar,parr}@cs.duke.edu Abstract Probabilistic approaches have proved
DP-SLAM 2.0 Austin I. Eliazar and Ronald Parr Department of Computer Science Duke University Durham, North Carolina 27708 Email: {eliazar,parr}@cs.duke.edu Abstract Probabilistic approaches have proved
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Monte Carlo Localization using Dynamically Expanding Occupancy Grids. Karan M. Gupta
 1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS. Oliver Wulf, Bernardo Wagner
 USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
IMPROVED LASER-BASED NAVIGATION FOR MOBILE ROBOTS
 Improved Laser-based Navigation for Mobile Robots 79 SDU International Journal of Technologic Sciences pp. 79-92 Computer Technology IMPROVED LASER-BASED NAVIGATION FOR MOBILE ROBOTS Muhammad AWAIS Abstract
Improved Laser-based Navigation for Mobile Robots 79 SDU International Journal of Technologic Sciences pp. 79-92 Computer Technology IMPROVED LASER-BASED NAVIGATION FOR MOBILE ROBOTS Muhammad AWAIS Abstract
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg
 Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg") Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Constant/Linear Time Simultaneous Localization and Mapping for Dense Maps
 Constant/Linear Time Simultaneous Localization and Mapping for Dense Maps Austin I. Eliazar Ronald Parr Department of Computer Science Duke University Durham, NC 27708 feliazar,parrg@cs.duke.edu Abstract
Constant/Linear Time Simultaneous Localization and Mapping for Dense Maps Austin I. Eliazar Ronald Parr Department of Computer Science Duke University Durham, NC 27708 feliazar,parrg@cs.duke.edu Abstract
Adapting the Sample Size in Particle Filters Through KLD-Sampling
 Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Introduction to Mobile Robotics Probabilistic Motion Models
 Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? Dynamic
Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? Dynamic
Generalizing Random-Vector SLAM with Random Finite Sets
 Generalizing Random-Vector SLAM with Random Finite Sets Keith Y. K. Leung, Felipe Inostroza, Martin Adams Advanced Mining Technology Center AMTC, Universidad de Chile, Santiago, Chile eith.leung@amtc.uchile.cl,
Generalizing Random-Vector SLAM with Random Finite Sets Keith Y. K. Leung, Felipe Inostroza, Martin Adams Advanced Mining Technology Center AMTC, Universidad de Chile, Santiago, Chile eith.leung@amtc.uchile.cl,
Efficient SLAM Scheme Based ICP Matching Algorithm Using Image and Laser Scan Information
 Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
CSE 490R P3 - Model Learning and MPPI Due date: Sunday, Feb 28-11:59 PM
 CSE 490R P3 - Model Learning and MPPI Due date: Sunday, Feb 28-11:59 PM 1 Introduction In this homework, we revisit the concept of local control for robot navigation, as well as integrate our local controller
CSE 490R P3 - Model Learning and MPPI Due date: Sunday, Feb 28-11:59 PM 1 Introduction In this homework, we revisit the concept of local control for robot navigation, as well as integrate our local controller
Tracking Multiple Moving Objects with a Mobile Robot
 Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
Online Simultaneous Localization and Mapping in Dynamic Environments
 To appear in Proceedings of the Intl. Conf. on Robotics and Automation ICRA New Orleans, Louisiana, Apr, 2004 Online Simultaneous Localization and Mapping in Dynamic Environments Denis Wolf and Gaurav
To appear in Proceedings of the Intl. Conf. on Robotics and Automation ICRA New Orleans, Louisiana, Apr, 2004 Online Simultaneous Localization and Mapping in Dynamic Environments Denis Wolf and Gaurav
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Evaluation of a Coupled Laser Inertial Navigation System for Pedestrian Tracking
 Evaluation of a Coupled Laser Inertial Navigation System for Pedestrian Tracking Christoph Degen, Hichem El Mokni, Felix Govaers, Sensor Data- and Information Fusion, Fraunhofer-Institut für Kommunikation,
Evaluation of a Coupled Laser Inertial Navigation System for Pedestrian Tracking Christoph Degen, Hichem El Mokni, Felix Govaers, Sensor Data- and Information Fusion, Fraunhofer-Institut für Kommunikation,
Today MAPS AND MAPPING. Features. process of creating maps. More likely features are things that can be extracted from images:
 MAPS AND MAPPING Features In the first class we said that navigation begins with what the robot can see. There are several forms this might take, but it will depend on: What sensors the robot has What
MAPS AND MAPPING Features In the first class we said that navigation begins with what the robot can see. There are several forms this might take, but it will depend on: What sensors the robot has What
IN recent years, NASA s Mars Exploration Rovers (MERs)
") Robust Landmark Estimation for SLAM in Dynamic Outdoor Environment Atsushi SAKAI, Teppei SAITOH and Yoji KURODA Meiji University, Department of Mechanical Engineering, 1-1-1 Higashimita, Tama-ku, Kawasaki,
Robust Landmark Estimation for SLAM in Dynamic Outdoor Environment Atsushi SAKAI, Teppei SAITOH and Yoji KURODA Meiji University, Department of Mechanical Engineering, 1-1-1 Higashimita, Tama-ku, Kawasaki,
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps
 Lecture#06(Thursday September 11) Occupancy Maps") Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Monte Carlo Localization for Mobile Robots
 Monte Carlo Localization for Mobile Robots Frank Dellaert 1, Dieter Fox 2, Wolfram Burgard 3, Sebastian Thrun 4 1 Georgia Institute of Technology 2 University of Washington 3 University of Bonn 4 Carnegie
Monte Carlo Localization for Mobile Robots Frank Dellaert 1, Dieter Fox 2, Wolfram Burgard 3, Sebastian Thrun 4 1 Georgia Institute of Technology 2 University of Washington 3 University of Bonn 4 Carnegie
Scan-point Planning and 3-D Map Building for a 3-D Laser Range Scanner in an Outdoor Environment
 Scan-point Planning and 3-D Map Building for a 3-D Laser Range Scanner in an Outdoor Environment Keiji NAGATANI 1, Takayuki Matsuzawa 1, and Kazuya Yoshida 1 Tohoku University Summary. During search missions
Scan-point Planning and 3-D Map Building for a 3-D Laser Range Scanner in an Outdoor Environment Keiji NAGATANI 1, Takayuki Matsuzawa 1, and Kazuya Yoshida 1 Tohoku University Summary. During search missions
Practical Course WS 2010 Simultaneous Localization and Mapping
 Practical Course WS 2010 Simultaneous Localization and Mapping Cyrill Stachniss University of Freiburg, Germany Topics of this Course SLAM - simultaneous localization and mapping What does the world look
Practical Course WS 2010 Simultaneous Localization and Mapping Cyrill Stachniss University of Freiburg, Germany Topics of this Course SLAM - simultaneous localization and mapping What does the world look
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
Indoor Localization Algorithms for a Human-Operated Backpack System
 Indoor Localization Algorithms for a Human-Operated Backpack System George Chen, John Kua, Stephen Shum, Nikhil Naikal, Matthew Carlberg, Avideh Zakhor Video and Image Processing Lab, University of California,
Indoor Localization Algorithms for a Human-Operated Backpack System George Chen, John Kua, Stephen Shum, Nikhil Naikal, Matthew Carlberg, Avideh Zakhor Video and Image Processing Lab, University of California,
Using Artificial Landmarks to Reduce the Ambiguity in the Environment of a Mobile Robot
 Using Artificial Landmarks to Reduce the Ambiguity in the Environment of a Mobile Robot Daniel Meyer-Delius Maximilian Beinhofer Alexander Kleiner Wolfram Burgard Abstract Robust and reliable localization
Using Artificial Landmarks to Reduce the Ambiguity in the Environment of a Mobile Robot Daniel Meyer-Delius Maximilian Beinhofer Alexander Kleiner Wolfram Burgard Abstract Robust and reliable localization
CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING
 CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING By Michael Lowney Senior Thesis in Electrical Engineering University of Illinois at Urbana-Champaign Advisor: Professor Minh Do May 2015
CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING By Michael Lowney Senior Thesis in Electrical Engineering University of Illinois at Urbana-Champaign Advisor: Professor Minh Do May 2015
Principles of Robot Motion
 Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
2D Simultaneous Localization And Mapping. Peter Bailey. Matthew Beckler. Richard Hoglund. John Saxton
 2D Simultaneous Localization And Mapping Peter Bailey Matthew Beckler Richard Hoglund John Saxton Abstract A common challenge for autonomous robots is the Simultaneous Localization and Mapping (SLAM) problem:
2D Simultaneous Localization And Mapping Peter Bailey Matthew Beckler Richard Hoglund John Saxton Abstract A common challenge for autonomous robots is the Simultaneous Localization and Mapping (SLAM) problem:
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
L15. POSE-GRAPH SLAM. NA568 Mobile Robotics: Methods & Algorithms
 L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping Feature-Based SLAM Filtering Problem: Motion Prediction
L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping Feature-Based SLAM Filtering Problem: Motion Prediction
Robot Mapping. TORO Gradient Descent for SLAM. Cyrill Stachniss
 Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Planning for Simultaneous Localization and Mapping using Topological Information
 Planning for Simultaneous Localization and Mapping using Topological Information Rafael Gonçalves Colares e Luiz Chaimowicz Abstract This paper presents a novel approach for augmenting simultaneous localization
Planning for Simultaneous Localization and Mapping using Topological Information Rafael Gonçalves Colares e Luiz Chaimowicz Abstract This paper presents a novel approach for augmenting simultaneous localization
Fast Randomized Planner for SLAM Automation
 Fast Randomized Planner for SLAM Automation Amey Parulkar*, Piyush Shukla*, K Madhava Krishna+ Abstract In this paper, we automate the traditional problem of Simultaneous Localization and Mapping (SLAM)
Fast Randomized Planner for SLAM Automation Amey Parulkar*, Piyush Shukla*, K Madhava Krishna+ Abstract In this paper, we automate the traditional problem of Simultaneous Localization and Mapping (SLAM)