Robot-assisted MRI-guided prostate biopsy using 3D Slicer
|
|
|
- Barnaby Jeffry Brooks
- 5 years ago
- Views:
Transcription
1 NA-MIC Robot-assisted MRI-guided prostate biopsy using 3D Slicer Andras Lasso, Junichi Tokuda Nobuhiko Hata, Gabor Fichtinger Queenʼs University Brigham and Womenʼs Hospital NA-MIC Tutorial Contest: Summer 2010


2 Learning Objective This tutorial demonstrates how to perform a MRIguided robot-assisted prostate biopsy and seed placement using 3D Slicer. It is not necessary to have access to a robotic device or an MRI scanner to complete the tutorial.
3 Pre-requisite This tutorial assumes that you have already completed the Slicer3Visualization Tutorial (by Sonia Pujol) The tutorial is available at:
4 Material This tutorial requires the installation of the Slicer3.6 releaseand the tutorial dataset. They are available at the following locations: Slicer3.6 download page Tutorial dataset: ProstateNavData_TutorialContestSummer Disclaimer:It is the responsibility of the user of Slicer to comply with both the terms of the license and with the applicable laws, regulations, and rules.
5 Platform The tutorial has been developed and tested on Windows XP and Windows 7 platforms.
6 Overview MRI-guided prostate biopsy: clinical background Systems overview Clinical workflow Set up and calibration Target planning and needle insertion Verification Conclusion

7 MRI-guided prostate biopsy: clinical background Prostate cancer, most common cancer in men Core needle biopsy definitive diagnostic for prostate cancer TRUS has been Gold standard for guiding biopsy MRI/MRS offers high sensitivity for localizing tumor Robotic access required inside scanner 1,2 Prostate images from ultrasound, CT, and MRI

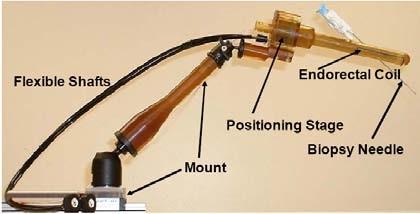

8 Systems overview
9 More information Detailed information about the transrectalprocedure: [1] Krieger A, Susil RC, Menard C, Coleman JA, Fichtinger G, Atalar E, Whitcomb LL, Design of A Novel MRI Compatible Manipulator for Image Guided Prostate Intervention, IEEE Trans. Biomed. Eng. 2005; 52(2): [2] Susil RC, Ménard C, Krieger A, Coleman JA, Camphausen K, Choyke P, Ullman K, Smith S, Fichtinger G, Whitcomb LL, Coleman NC, Atalar E, Transrectal Prostate Biopsy and Fiducial Marker Placement in a Standard 1.5T MRI Scanner, J Urol Jan;175(1):113-20
10 Clinical workflow Acquire a calibration volume (high resolution image of the calibration object) Calibrate/register robot to MR coordinate system Acquire targeting volume (high-resolution image of the patient anatomy) Pick/mark biopsy or seed targets Perform needle insertion Acquire verification volume (quick, low-resolution image with needle still in place) Verify the needle position
11 Set upand calibration

12 Start the ProstateNav module When 3D Slicer is started it shows the Welcome window on the left. To see the user interface of the prostate biopsy navigation module: 1 Click on the Modules list 2 Click on the IGT 3 Click on the ProstateNav 1 2 3

13 Select a robot device Before starting the procedure the needle guidance devicehas to be set up. 1 Click on the Active configuration list and select Create New ProstateNavManager to create a new ProstateNavManager node. All the calibration, planning, targeting, and verification information will be saved into this node. 2 Click on the Robot list and select the device that will be used for the needle insertion. This tutorial presents the workflow for the transrectal robotic device, so choosethe Create New TransRectalProstateRobot item When the robotic device is selected then the Workphase and Wizard windows are updated to show the transrectal procedure workflow steps. 1 2

14 Load calibration image 1 Click on the Load volume button 2 Select the image folder in the folder tree 3 Click on Parse directory 4 -Select the calibration image: 701 Sag 3Pt Plan 5 -Click Apply

15 Mark calibration fiducials 1 Select a slice where the fiducials are visible by using the slider above the image and/or using the mouse wheel 2..5 In any of slice views, click near the center of each marker
 2 2 The segmented fiducials are shown in the 3D viewer window.")
16 Review calibration results 1 Numerical results displayed (axes angle, distance) 2 2 The segmented fiducials are shown in the 3D viewer window. 1 2
, then calibration can be refined: A Click on the small arrow next to Fiducial Properties to show the segmentation parameters B Segmentation parameters A")
17 Refine calibration results If either the numerical results or the displayed marker segmentation indicates that the calibration might be inaccurate (large axes distance, axes angle different from 37 B deg, marker contours are uneven or incomplete), then calibration can be refined: A Click on the small arrow next to Fiducial Properties to show the segmentation parameters B Segmentation parameters A Fiducial size: W/H/D = width/height/depth of the region around the clicked point where automatic marker detection is performed. Fiducial radius: only voxels that are closer to the axis than this radius will be included in the automatic marker detectionregion. Threshold: marker segmentation threshold Enable automatic marker centerpoint detection: If enabled, then marker center will be automatically detected, near the clicked position, using the fi ducial size, radius, and threshold parameters. If disabled then the clicked positions will be used as marker centerpoint positions. C Edit marker positions: enable this checkbox to set the mouse mode so that clicks on the image places fiducial markers D Re-segment: click to re-run automatic marker detection algorithm after changing segmentation parameters E Reset calibration: removes calibration markers C D E
18 Target planning and needle insertion

19 Load targeting image 1 Click on the Targeting button to move to the planning and targeting workflow step 1 Click on the Load volume button 2 Select the image folder in the folder tree 3 Click on Parse directory 4 -Select the targeting image: 801 -T2 AXIAL Plan 5 -Click Apply
 3 Click on the label layer opacity icon and move the slider to adjust coverage area display opacity 4 Click the eye icons to show/hide a slice in the 3D viewer 4 4")
20 Prepare target planning 1 Select the targeting volume: 801 T2 AXIAL 2 Click Show coverage and browse through the slices to verify that the device can reach all the desired target areas (displayed as a blue overlay) 3 Click on the label layer opacity icon and move the slider to adjust coverage area display opacity 4 Click the eye icons to show/hide a slice in the 3D viewer
21 Define targets Perform the following steps for each target: 1 Select the needle type 2 Navigate to desired slice in any of three views, and pick a target by clicking 3 -Target and its targeting parameters populated in 3 the list (double-click on any of the position value to enter a specific R/A/S coordinate value) 4 -Target point is displayed in the 3D view 2 1 4
 monitor 4 3 The robot is motorized, one has to manually set the displayed targeting parameters on the robot")
22 Needle insertion 1 Click on a target in the target list 2 Targeting parameters are shown below the target list 3 The target and needle trajectory is displayed in all the slice views and 1 in the 3D view 4 3D view and targeting parameters are displayed in the secondary 2 (procedure room) monitor 4 3 The robot is motorized, one has to manually set the displayed targeting parameters on the robot manipulator and insert the needle.
23 Verification

24 Load verification image 1 Click on the Verification button to move to the verification workflow step 1 Click on the Load volume button 2 Select the image folder in the folder tree 3 Click on Parse directory 4 -Select the verification image: 1101-Needle Ax 5 -Click Apply
25 Verify target visually 1 Select the verification image (where the needle is visible) 2 Click on the target in the target list that corresponds to the needle in the image 3 Three orthogonal 2 slices are shown in the slice viewers, reformatted to be aligned with the planned needle trajectory 1 3
26 Verify a target quantitatively To quantitatively evaluate the targeting error: 1 Click on Verify target 2, 3 Click on the centerline of the needle at two different positions (anywhere along the needle, as far as possible from each other) 1 4 The distance of the needle centerline from the target point is displayed in the target list 3 4 2

27 Evaluate patient motion 1 Click on Targeting 2 Re-select the targeting image to show it in the slice viewers 3 Select the Red slice only layout to see a maximized view of the axial slice 4 Select the latest acquired image to be in the foreground 5 Use the slider to fade between the targeting and the latest image to see if there was any significant patient motion
28 Conclusion 3D Slicer with ProstateNav allows planning, performing, and evaluating MRI-guided prostate intervention. ProstateNav relies on Slicer core features for volume, model, and fiducial visualization and applies them to fulfill application-specific needs. Slicer core features and extensions can be used to interactively explore, understand the data, and troubleshoot the image-guided intervention system (proved to work very well in preliminary clinical testing).

29 Acknowledgements National Alliance for Medical Image Computing NIH U54EB National Institutes of Health 1 R01 CA A2, 1R01CA111288, 5U41RR019703, 5P01CA067165, 1R01CA124377, 5P41RR013218, 5U54EB005149, 5R01CA109246
Non-rigid Registration of Preprocedural MRI and Intra-procedural CT for CT-guided Cryoablation Therapy of Liver Cancer
 NA-MIC Non-rigid Registration of Preprocedural MRI and Intra-procedural CT for CT-guided Cryoablation Therapy of Liver Cancer Atsushi Yamada, Dominik S. Meier and Nobuhiko Hata Brigham and Women s Hospital
NA-MIC Non-rigid Registration of Preprocedural MRI and Intra-procedural CT for CT-guided Cryoablation Therapy of Liver Cancer Atsushi Yamada, Dominik S. Meier and Nobuhiko Hata Brigham and Women s Hospital
Software Strategy for Robotic Transperineal Prostate Therapy in Closed-Bore MRI
 Software Strategy for Robotic Transperineal Prostate Therapy in Closed-Bore MRI Junichi Tokuda 1,GregoryS.Fischer 2,CsabaCsoma 2, Simon P. DiMaio 3, David G. Gobbi 4, Gabor Fichtinger 4,ClareM.Tempany
Software Strategy for Robotic Transperineal Prostate Therapy in Closed-Bore MRI Junichi Tokuda 1,GregoryS.Fischer 2,CsabaCsoma 2, Simon P. DiMaio 3, David G. Gobbi 4, Gabor Fichtinger 4,ClareM.Tempany
Slicer4Minute Tutorial. Sonia Pujol, Ph.D. Surgical Planning Laboratory Harvard Medical School
 Slicer4Minute Tutorial Sonia Pujol, Ph.D. Surgical Planning Laboratory Harvard Medical School 1 Slicer4 minute tutorial This tutorial is a 4-minute introduction to the 3D visualization capabilities of
Slicer4Minute Tutorial Sonia Pujol, Ph.D. Surgical Planning Laboratory Harvard Medical School 1 Slicer4 minute tutorial This tutorial is a 4-minute introduction to the 3D visualization capabilities of
NA-MIC National Alliance for Medical Image Computing SlicerRT Extension
 NA-MIC SlicerRT Extension Csaba Pinter 1, Andras Lasso 1, Kevin Wang 2 11 Laboratory for Percutaneous Surgery, Queen s University, Canada 2 University Health Network, Toronto, ON, Canada pinter@cs.queensu.ca
NA-MIC SlicerRT Extension Csaba Pinter 1, Andras Lasso 1, Kevin Wang 2 11 Laboratory for Percutaneous Surgery, Queen s University, Canada 2 University Health Network, Toronto, ON, Canada pinter@cs.queensu.ca
Data Loading & 3D Visualization
 Neuroimage Analysis Center Data Loading & 3D Visualization Sonia Pujol, Ph.D. Surgical Planning Laboratory Harvard Medical School Leonardo da Vinci (1452-1519), Virgin and Child Alte Pinakothek, München
Neuroimage Analysis Center Data Loading & 3D Visualization Sonia Pujol, Ph.D. Surgical Planning Laboratory Harvard Medical School Leonardo da Vinci (1452-1519), Virgin and Child Alte Pinakothek, München
Slicer3 Minute Tutorial
 Slicer3 Minute Tutorial Surgical Planning Laboratory Harvard Medical School Sonia Pujol, PhD Slicer3 Minute Tutorial This tutorial is a short introduction to the advanced 3D visualization capabilities
Slicer3 Minute Tutorial Surgical Planning Laboratory Harvard Medical School Sonia Pujol, PhD Slicer3 Minute Tutorial This tutorial is a short introduction to the advanced 3D visualization capabilities
Slicer3 minute tutorial
 Slicer3 minute tutorial Sonia Pujol, Ph.D. Surgical Planning Laboratory Harvard Medical School -1- Slicer3 minute tutorial This tutorial is a short introduction to the advanced 3D visualization capabilities
Slicer3 minute tutorial Sonia Pujol, Ph.D. Surgical Planning Laboratory Harvard Medical School -1- Slicer3 minute tutorial This tutorial is a short introduction to the advanced 3D visualization capabilities
A high accuracy multi-image registration method for tracking MRIguided
 A high accuracy multi-image registration method for tracking MRIguided robots Weijian Shang* a, Gregory S. Fischer* a a Worcester Polytechnic Institute, 100 Institute Road, Worcester, MA, USA 01609; ABSTRACT
A high accuracy multi-image registration method for tracking MRIguided robots Weijian Shang* a, Gregory S. Fischer* a a Worcester Polytechnic Institute, 100 Institute Road, Worcester, MA, USA 01609; ABSTRACT
Visualization, Planning, and Monitoring Software for MRI-Guided Prostate Intervention Robot
 Visualization, Planning, and Monitoring Software for MRI-Guided Prostate Intervention Robot Emese Balogh 1,6, Anton Deguet 1, Robert C. Susil 2, Axel Krieger 3, Anand Viswanathan 1, Cynthia Ménard 4, Jonathan
Visualization, Planning, and Monitoring Software for MRI-Guided Prostate Intervention Robot Emese Balogh 1,6, Anton Deguet 1, Robert C. Susil 2, Axel Krieger 3, Anand Viswanathan 1, Cynthia Ménard 4, Jonathan
INTRODUCTION TO MEDICAL IMAGING- 3D LOCALIZATION LAB MANUAL 1. Modifications for P551 Fall 2013 Medical Physics Laboratory
 INTRODUCTION TO MEDICAL IMAGING- 3D LOCALIZATION LAB MANUAL 1 Modifications for P551 Fall 2013 Medical Physics Laboratory Introduction Following the introductory lab 0, this lab exercise the student through
INTRODUCTION TO MEDICAL IMAGING- 3D LOCALIZATION LAB MANUAL 1 Modifications for P551 Fall 2013 Medical Physics Laboratory Introduction Following the introductory lab 0, this lab exercise the student through
Exploration and Study of MultiVolume Image Data using 3D Slicer
 Exploration and Study of MultiVolume Image Data using 3D Slicer Meysam Torabi and Andriy Fedorov torabi@bwh.harvard.edu, fedorov@bwh.harvard.edu Surgical Navigation and Robotics Lab and Surgical Planning
Exploration and Study of MultiVolume Image Data using 3D Slicer Meysam Torabi and Andriy Fedorov torabi@bwh.harvard.edu, fedorov@bwh.harvard.edu Surgical Navigation and Robotics Lab and Surgical Planning
Real-time self-calibration of a tracked augmented reality display
 Real-time self-calibration of a tracked augmented reality display Zachary Baum, Andras Lasso, Tamas Ungi, Gabor Fichtinger Laboratory for Percutaneous Surgery, Queen s University, Kingston, Canada ABSTRACT
Real-time self-calibration of a tracked augmented reality display Zachary Baum, Andras Lasso, Tamas Ungi, Gabor Fichtinger Laboratory for Percutaneous Surgery, Queen s University, Kingston, Canada ABSTRACT
Slicer3 Tutorial. Manual Registration. NA-MIC National Alliance for Medical Image Computing Dominik Meier, Ron Kikinis
 NA-MIC Slicer3 Tutorial Manual Registration Dominik Meier, Ron Kikinis Overview Introduction takes how long to do? Prerequisites 3. Loading Example Dataset 10 sec 4. Creating New Transform 10 sec 5. Associate
NA-MIC Slicer3 Tutorial Manual Registration Dominik Meier, Ron Kikinis Overview Introduction takes how long to do? Prerequisites 3. Loading Example Dataset 10 sec 4. Creating New Transform 10 sec 5. Associate
Quantitative Analysis and Visualization with 3D Slicer
 Surgical Planning Laboratory Brigham and Women s Hospital Boston, Massachusetts USA a teaching affiliate of Harvard Medical School Quantitative Analysis and Visualization with 3D Slicer Jeffrey Yapp, PhD
Surgical Planning Laboratory Brigham and Women s Hospital Boston, Massachusetts USA a teaching affiliate of Harvard Medical School Quantitative Analysis and Visualization with 3D Slicer Jeffrey Yapp, PhD
3D Slicer Overview. Andras Lasso, PhD PerkLab, Queen s University
 3D Slicer Overview Andras Lasso, PhD PerkLab, Queen s University Right tool for the job Technological prototype Research tool Clinical tool Can it be done? Jalopnik.com Innovative, not robust, usually
3D Slicer Overview Andras Lasso, PhD PerkLab, Queen s University Right tool for the job Technological prototype Research tool Clinical tool Can it be done? Jalopnik.com Innovative, not robust, usually
A generic computer assisted intervention plug-in module for 3D Slicer with multiple device support
 A generic computer assisted intervention plug-in module for 3D Slicer with multiple device support Release 1.00 András Lassó 1, Junichi Tokuda 2, Siddharth Vikal 1, Clare M Tempany 2, Nobuhiko Hata 2,
A generic computer assisted intervention plug-in module for 3D Slicer with multiple device support Release 1.00 András Lassó 1, Junichi Tokuda 2, Siddharth Vikal 1, Clare M Tempany 2, Nobuhiko Hata 2,
NIH Public Access Author Manuscript Comput Med Imaging Graph. Author manuscript; available in PMC 2010 February 2.
 NIH Public Access Author Manuscript Integrated navigation and control software system for MRI-guided robotic prostate interventions Junichi Tokuda a,*, Gregory S. Fischer b, Simon P. DiMaio d, David G.
NIH Public Access Author Manuscript Integrated navigation and control software system for MRI-guided robotic prostate interventions Junichi Tokuda a,*, Gregory S. Fischer b, Simon P. DiMaio d, David G.
3D Visualization of FreeSurfer Data
 3D Visualization of FreeSurfer Data Sonia Pujol, Ph.D. Silas Mann, B.Sc. Randy Gollub, MD., Ph.D. Surgical Planning Laboratory Athinoula A. Martinos Center Harvard University Acknowledgements NIH U54EB005149
3D Visualization of FreeSurfer Data Sonia Pujol, Ph.D. Silas Mann, B.Sc. Randy Gollub, MD., Ph.D. Surgical Planning Laboratory Athinoula A. Martinos Center Harvard University Acknowledgements NIH U54EB005149
Slicer3 Tutorial: Registration Library Case 14. Intra-subject Brain PET-MRI fusion
 NA-MIC Slicer3 Tutorial: Registration Library Case 14 Intra-subject Brain PET-MRI fusion Dominik Meier, Ron Kikinis March 2010 Overview 1. Introduction 2. Prerequisites 3. Modules Used takes how long to
NA-MIC Slicer3 Tutorial: Registration Library Case 14 Intra-subject Brain PET-MRI fusion Dominik Meier, Ron Kikinis March 2010 Overview 1. Introduction 2. Prerequisites 3. Modules Used takes how long to
Multi-slice-to-volume registration for MRI-guided transperineal prostate biopsy
 DOI 10.1007/s11548-014-1108-7 ORIGINAL ARTICLE Multi-slice-to-volume registration for MRI-guided transperineal prostate biopsy Helen Xu Andras Lasso Andriy Fedorov Kemal Tuncali Clare Tempany Gabor Fichtinger
DOI 10.1007/s11548-014-1108-7 ORIGINAL ARTICLE Multi-slice-to-volume registration for MRI-guided transperineal prostate biopsy Helen Xu Andras Lasso Andriy Fedorov Kemal Tuncali Clare Tempany Gabor Fichtinger
NIH Public Access Author Manuscript Proc SPIE. Author manuscript; available in PMC 2010 December 1.
 NIH Public Access Author Manuscript Published in final edited form as: Proc SPIE. 2010 February 23; 7625(8): 76251A. Design of a predictive targeting error simulator for MRI-guided prostate biopsy Shachar
NIH Public Access Author Manuscript Published in final edited form as: Proc SPIE. 2010 February 23; 7625(8): 76251A. Design of a predictive targeting error simulator for MRI-guided prostate biopsy Shachar
Slicer3 Training Tutorial Manual segmentation of orbit structures from isotropic MRI data within 3D Slicer for windows
 Slicer3 Training Compendium Slicer3 Training Tutorial Manual segmentation of orbit structures from isotropic MRI data within 3D Slicer for windows Dr Raphael Olszewski Surgical Planning Laboratory Brigham
Slicer3 Training Compendium Slicer3 Training Tutorial Manual segmentation of orbit structures from isotropic MRI data within 3D Slicer for windows Dr Raphael Olszewski Surgical Planning Laboratory Brigham
Intraoperative Prostate Tracking with Slice-to-Volume Registration in MR
 Intraoperative Prostate Tracking with Slice-to-Volume Registration in MR Sean Gill a, Purang Abolmaesumi a,b, Siddharth Vikal a, Parvin Mousavi a and Gabor Fichtinger a,b,* (a) School of Computing, Queen
Intraoperative Prostate Tracking with Slice-to-Volume Registration in MR Sean Gill a, Purang Abolmaesumi a,b, Siddharth Vikal a, Parvin Mousavi a and Gabor Fichtinger a,b,* (a) School of Computing, Queen
Target Motion Tracking in MRI-guided Transrectal Robotic Prostate Biopsy
 Target Motion Tracking in MRI-guided Transrectal Robotic Prostate Biopsy Hadi Tadayyon, Member, IEEE, Andras Lasso, Member, IEEE, Aradhana Kaushal, Peter Guion, Member, IEEE, and Gabor Fichtinger, Member,
Target Motion Tracking in MRI-guided Transrectal Robotic Prostate Biopsy Hadi Tadayyon, Member, IEEE, Andras Lasso, Member, IEEE, Aradhana Kaushal, Peter Guion, Member, IEEE, and Gabor Fichtinger, Member,
3D Slicer. NA-MIC National Alliance for Medical Image Computing 4 February 2011
 NA-MIC http://na-mic.org 3D Slicer 4 February 2011 Andrey Fedorov, PhD Steve Pieper, PhD Ron Kikinis, MD Surgical Planning Lab Brigham and Women's Hospital Acknowledgments Picture courtesy Kapur, Jakab,
NA-MIC http://na-mic.org 3D Slicer 4 February 2011 Andrey Fedorov, PhD Steve Pieper, PhD Ron Kikinis, MD Surgical Planning Lab Brigham and Women's Hospital Acknowledgments Picture courtesy Kapur, Jakab,
Learn Image Segmentation Basics with Hands-on Introduction to ITK-SNAP. RSNA 2016 Courses RCB22 and RCB54
 Learn Image Segmentation Basics with Hands-on Introduction to ITK-SNAP RSNA 2016 Courses RCB22 and RCB54 RCB22 Mon, Nov 28 10:30-12:00 PM, Room S401CD RCB54 Thu, Dec 1 2:30-4:30 PM, Room S401CD Presenters:
Learn Image Segmentation Basics with Hands-on Introduction to ITK-SNAP RSNA 2016 Courses RCB22 and RCB54 RCB22 Mon, Nov 28 10:30-12:00 PM, Room S401CD RCB54 Thu, Dec 1 2:30-4:30 PM, Room S401CD Presenters:
SIVIC GUI Overview. SIVIC GUI Layout Overview
 SIVIC GUI Overview SIVIC GUI Layout Overview At the top of the SIVIC GUI is a row of buttons called the Toolbar. It is a quick interface for loading datasets, controlling how the mouse manipulates the
SIVIC GUI Overview SIVIC GUI Layout Overview At the top of the SIVIC GUI is a row of buttons called the Toolbar. It is a quick interface for loading datasets, controlling how the mouse manipulates the
Closed-Loop Control in Fused MR-TRUS Image-Guided Prostate Biopsy
 Closed-Loop Control in Fused MR-TRUS Image-Guided Prostate Biopsy Sheng Xu 1, Jochen Kruecker 1, Peter Guion 2, Neil Glossop 3, Ziv Neeman 2, Peter Choyke 2, Anurag K. Singh 2, and Bradford J. Wood 2 1
Closed-Loop Control in Fused MR-TRUS Image-Guided Prostate Biopsy Sheng Xu 1, Jochen Kruecker 1, Peter Guion 2, Neil Glossop 3, Ziv Neeman 2, Peter Choyke 2, Anurag K. Singh 2, and Bradford J. Wood 2 1
BrainMask. Quick Start
 BrainMask Quick Start Segmentation of the brain from three-dimensional MR images is a crucial preprocessing step in morphological and volumetric brain studies. BrainMask software implements a fully automatic
BrainMask Quick Start Segmentation of the brain from three-dimensional MR images is a crucial preprocessing step in morphological and volumetric brain studies. BrainMask software implements a fully automatic
NIH Public Access Author Manuscript Proc Soc Photo Opt Instrum Eng. Author manuscript; available in PMC 2014 July 28.
 NIH Public Access Author Manuscript Published in final edited form as: Proc Soc Photo Opt Instrum Eng. 2014 March 12; 9036: 90361F. doi:10.1117/12.2044381. EM-Navigated Catheter Placement for Gynecologic
NIH Public Access Author Manuscript Published in final edited form as: Proc Soc Photo Opt Instrum Eng. 2014 March 12; 9036: 90361F. doi:10.1117/12.2044381. EM-Navigated Catheter Placement for Gynecologic
NA-MIC National Alliance for Medical Image Computing fmri Data Analysis
 NA-MIC fmri Data Analysis Sonia Pujol, Ph.D. Wendy Plesniak, Ph.D. Randy Gollub, M.D., Ph.D. Acknowledgments NIH U54EB005149 Neuroimage Analysis Center NIH P41RR013218 FIRST Biomedical Informatics Research
NA-MIC fmri Data Analysis Sonia Pujol, Ph.D. Wendy Plesniak, Ph.D. Randy Gollub, M.D., Ph.D. Acknowledgments NIH U54EB005149 Neuroimage Analysis Center NIH P41RR013218 FIRST Biomedical Informatics Research
ClinicalConnect TM eunity TM Training Guide
 ClinicalConnect TM eunity TM Training Guide October, 2013 Launch eunity TM from ClinicalConnect TM Search and select the patient whose record you wish to view. Navigate to the Radiology module in ClinicalConnect
ClinicalConnect TM eunity TM Training Guide October, 2013 Launch eunity TM from ClinicalConnect TM Search and select the patient whose record you wish to view. Navigate to the Radiology module in ClinicalConnect
How To Title: Scan and File into ICS Purpose: To scan and file information into the patient s medical record Audience: All Staff Date: June 21, 2013
 There are two ways to import medical records into ICS: A. Scan paper document(s) utilizing a scanner B. Import documents from a file, folder or Right Fax Acquiring images through a scanner: 1. Check that
There are two ways to import medical records into ICS: A. Scan paper document(s) utilizing a scanner B. Import documents from a file, folder or Right Fax Acquiring images through a scanner: 1. Check that
BrainMask. Quick Start
 BrainMask Quick Start Segmentation of the brain from three-dimensional MR images is a crucial pre-processing step in morphological and volumetric brain studies. BrainMask software implements a fully automatic
BrainMask Quick Start Segmentation of the brain from three-dimensional MR images is a crucial pre-processing step in morphological and volumetric brain studies. BrainMask software implements a fully automatic
Atlas Registration & Label Merging
 NA-MIC Slicer3 Tutorial Atlas Registration & Label Merging Dominik Meier, Ron Kikinis February 2010 Overview 1. Introduction 2. Prerequisites 3. Modules Used takes how long to do? 4. Loading Example Dataset
NA-MIC Slicer3 Tutorial Atlas Registration & Label Merging Dominik Meier, Ron Kikinis February 2010 Overview 1. Introduction 2. Prerequisites 3. Modules Used takes how long to do? 4. Loading Example Dataset
NA-MIC National Alliance for Medical Image Computing Subject Hierarchy
 NA-MIC Subject Hierarchy Csaba Pinter Queen s University, Canada csaba.pinter@queensu.ca NA-MIC Tutorial Contest: Winter 2016 Learning Objective This tutorial demonstrates the basic usage and potential
NA-MIC Subject Hierarchy Csaba Pinter Queen s University, Canada csaba.pinter@queensu.ca NA-MIC Tutorial Contest: Winter 2016 Learning Objective This tutorial demonstrates the basic usage and potential
Voxar 3D ColonMetrix. Reference Guide
 Voxar 3D ColonMetrix Reference Guide The software described in this document is furnished under a license, and may be used or copied only according to the terms of such license. Toshiba means, Toshiba
Voxar 3D ColonMetrix Reference Guide The software described in this document is furnished under a license, and may be used or copied only according to the terms of such license. Toshiba means, Toshiba
syngo.mr Neuro 3D: Your All-In-One Post Processing, Visualization and Reporting Engine for BOLD Functional and Diffusion Tensor MR Imaging Datasets
 syngo.mr Neuro 3D: Your All-In-One Post Processing, Visualization and Reporting Engine for BOLD Functional and Diffusion Tensor MR Imaging Datasets Julien Gervais; Lisa Chuah Siemens Healthcare, Magnetic
syngo.mr Neuro 3D: Your All-In-One Post Processing, Visualization and Reporting Engine for BOLD Functional and Diffusion Tensor MR Imaging Datasets Julien Gervais; Lisa Chuah Siemens Healthcare, Magnetic
Automatic 3D Segmentation of Ultrasound Images Using Atlas Registration and Statistical Texture Prior
 Cum Laude Poster Award Automatic 3D Segmentation of Ultrasound Images Using Atlas Registration and Statistical Texture Prior Xiaofeng Yang 1, David Schuster 1, Viraj Master 2, Peter Nieh 2, Aaron Fenster
Cum Laude Poster Award Automatic 3D Segmentation of Ultrasound Images Using Atlas Registration and Statistical Texture Prior Xiaofeng Yang 1, David Schuster 1, Viraj Master 2, Peter Nieh 2, Aaron Fenster
Validation System of MR Image Overlay and Other Needle Insertion Techniques
 Submitted to the Proceedings fro Medicine Meets Virtual Reality 15 February 2007, Long Beach, California To appear in Stud. Health Inform Validation System of MR Image Overlay and Other Needle Insertion
Submitted to the Proceedings fro Medicine Meets Virtual Reality 15 February 2007, Long Beach, California To appear in Stud. Health Inform Validation System of MR Image Overlay and Other Needle Insertion
Prototyping clinical applications with PLUS and SlicerIGT
 Prototyping clinical applications with PLUS and SlicerIGT Andras Lasso, Tamas Ungi, Csaba Pinter, Tomi Heffter, Adam Rankin, Gabor Fichtinger Queen s University, Canada Email: gabor@cs.queensu.ca PLUS
Prototyping clinical applications with PLUS and SlicerIGT Andras Lasso, Tamas Ungi, Csaba Pinter, Tomi Heffter, Adam Rankin, Gabor Fichtinger Queen s University, Canada Email: gabor@cs.queensu.ca PLUS
DIFFUSION TENSOR IMAGING ANALYSIS. Using Analyze
 DIFFUSION TENSOR IMAGING ANALYSIS Using Analyze 2 Table of Contents 1. Introduction page 3 2. Loading DTI Data page 4 3. Computing DTI Maps page 5 4. Defining ROIs for Fiber Tracking page 6 5. Visualizing
DIFFUSION TENSOR IMAGING ANALYSIS Using Analyze 2 Table of Contents 1. Introduction page 3 2. Loading DTI Data page 4 3. Computing DTI Maps page 5 4. Defining ROIs for Fiber Tracking page 6 5. Visualizing
Detecting White Matter Lesions in Lupus
 Slicer3 Training Compendium Detecting White Matter Lesions in Lupus Version 2.0 1/6/2009 H. Jeremy Bockholt Mark Scully -1- Learning objective Following this tutorial, you ll be able to load scans into
Slicer3 Training Compendium Detecting White Matter Lesions in Lupus Version 2.0 1/6/2009 H. Jeremy Bockholt Mark Scully -1- Learning objective Following this tutorial, you ll be able to load scans into
Projection-Based Needle Segmentation in 3D Ultrasound Images
 Projection-Based Needle Segmentation in 3D Ultrasound Images Mingyue Ding and Aaron Fenster Imaging Research Laboratories, Robarts Research Institute, 100 Perth Drive, London, ON, Canada, N6A 5K8 ^PGLQJDIHQVWHU`#LPDJLQJUREDUWVFD
Projection-Based Needle Segmentation in 3D Ultrasound Images Mingyue Ding and Aaron Fenster Imaging Research Laboratories, Robarts Research Institute, 100 Perth Drive, London, ON, Canada, N6A 5K8 ^PGLQJDIHQVWHU`#LPDJLQJUREDUWVFD
EMSegmenter Tutorial (Advanced Mode)
") EMSegmenter Tutorial (Advanced Mode) Dominique Belhachemi Section of Biomedical Image Analysis Department of Radiology University of Pennsylvania 1/65 Overview The goal of this tutorial is to apply the
EMSegmenter Tutorial (Advanced Mode) Dominique Belhachemi Section of Biomedical Image Analysis Department of Radiology University of Pennsylvania 1/65 Overview The goal of this tutorial is to apply the
n o r d i c B r a i n E x Tutorial DTI Module
 m a k i n g f u n c t i o n a l M R I e a s y n o r d i c B r a i n E x Tutorial DTI Module Please note that this tutorial is for the latest released nordicbrainex. If you are using an older version please
m a k i n g f u n c t i o n a l M R I e a s y n o r d i c B r a i n E x Tutorial DTI Module Please note that this tutorial is for the latest released nordicbrainex. If you are using an older version please
Contents... 1 Installation... 3
 Contents Contents... 1 Installation... 3 1 Prerequisites (check for.net framework 3.5)... 3 Install Doctor Eye... 3 Start Using Doctor Eye... 4 How to create a new user... 4 The Main Window... 4 Open a
Contents Contents... 1 Installation... 3 1 Prerequisites (check for.net framework 3.5)... 3 Install Doctor Eye... 3 Start Using Doctor Eye... 4 How to create a new user... 4 The Main Window... 4 Open a
GE Dynamic 13 C Acquisition
 GE Dynamic 13 C Acquisition In this example you will load a human prostate dynamic MRS data set (single slice, 24 time points) acquired on a GE 3T scanner. You will generate metabolite maps for pyruvate
GE Dynamic 13 C Acquisition In this example you will load a human prostate dynamic MRS data set (single slice, 24 time points) acquired on a GE 3T scanner. You will generate metabolite maps for pyruvate
Medical Image Viewer Guide
 Cloud Medical Image Management Medical Image Viewer Guide March 2016 Table of Contents Indications for Use 3 Browser Requirements 3 User Interface Overview 4-5 Study Page 6 Main Toolbar 7 Sub-Toolbars
Cloud Medical Image Management Medical Image Viewer Guide March 2016 Table of Contents Indications for Use 3 Browser Requirements 3 User Interface Overview 4-5 Study Page 6 Main Toolbar 7 Sub-Toolbars
HST.583 Functional Magnetic Resonance Imaging: Data Acquisition and Analysis Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu HST.583 Functional Magnetic Resonance Imaging: Data Acquisition and Analysis Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
MIT OpenCourseWare http://ocw.mit.edu HST.583 Functional Magnetic Resonance Imaging: Data Acquisition and Analysis Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
EMBO Practical Course on Image Processing for Cryo EM 1-11 September 2015
 EMBO Practical Course on Image Processing for Cryo EM 1-11 September 2015 Practical 4: Optional part for experienced IMOD users - Reconstructing a cryo tomogram and sub-tomogram averaging of GroEL IMOD
EMBO Practical Course on Image Processing for Cryo EM 1-11 September 2015 Practical 4: Optional part for experienced IMOD users - Reconstructing a cryo tomogram and sub-tomogram averaging of GroEL IMOD
Modifications for P551 Fall 2014
 LAB DEMONSTRATION COMPUTED TOMOGRAPHY USING DESKCAT 1 Modifications for P551 Fall 2014 Introduction This lab demonstration explores the physics and technology of Computed Tomography (CT) and guides the
LAB DEMONSTRATION COMPUTED TOMOGRAPHY USING DESKCAT 1 Modifications for P551 Fall 2014 Introduction This lab demonstration explores the physics and technology of Computed Tomography (CT) and guides the
fmri/dti analysis using Dynasuite
 fmri/dti analysis using Dynasuite Contents 1 Logging in 2 Finding patient session 3 Viewing and adjusting images 4 Checking brain segmentation 5 Checking image registration 6 Seeing fmri results 7 Saving
fmri/dti analysis using Dynasuite Contents 1 Logging in 2 Finding patient session 3 Viewing and adjusting images 4 Checking brain segmentation 5 Checking image registration 6 Seeing fmri results 7 Saving
Stroke Quantification Tool (Sonia) Ver User Manual
 Ver User Manual") Stroke Quantification Tool (Sonia) Ver. 1.0 User Manual English. 12/2016 Rev. 1.0 www.wakeup-stroke.eu 1 Table of Contents 1. Introduction...3 2. Installation...4 3. Data Import...5 4. Registration...7
Stroke Quantification Tool (Sonia) Ver. 1.0 User Manual English. 12/2016 Rev. 1.0 www.wakeup-stroke.eu 1 Table of Contents 1. Introduction...3 2. Installation...4 3. Data Import...5 4. Registration...7
McKesson Radiology Display Protocol Manual
 McKesson Radiology Display Protocol Manual Table of Contents Preparing a Site for Display Protocols... 5 Best Practices for Creating Display Protocols... 6 Creating a New Display Protocol... 7 Creating
McKesson Radiology Display Protocol Manual Table of Contents Preparing a Site for Display Protocols... 5 Best Practices for Creating Display Protocols... 6 Creating a New Display Protocol... 7 Creating
Navigation System for ACL Reconstruction Using Registration between Multi-Viewpoint X-ray Images and CT Images
 Navigation System for ACL Reconstruction Using Registration between Multi-Viewpoint X-ray Images and CT Images Mamoru Kuga a*, Kazunori Yasuda b, Nobuhiko Hata a, Takeyoshi Dohi a a Graduate School of
Navigation System for ACL Reconstruction Using Registration between Multi-Viewpoint X-ray Images and CT Images Mamoru Kuga a*, Kazunori Yasuda b, Nobuhiko Hata a, Takeyoshi Dohi a a Graduate School of
Slicer3 Training Tutorial Using EM Segmenter with Non- Human Primate Images
 Slicer3 Training Compendium Slicer3 Training Tutorial Using EM Segmenter with Non- Human Primate Images Vidya Rajagopalan Christopher Wyatt BioImaging Systems Lab Dept. of Electrical Engineering Virginia
Slicer3 Training Compendium Slicer3 Training Tutorial Using EM Segmenter with Non- Human Primate Images Vidya Rajagopalan Christopher Wyatt BioImaging Systems Lab Dept. of Electrical Engineering Virginia
Image Guidance and Beam Level Imaging in Digital Linacs
 Image Guidance and Beam Level Imaging in Digital Linacs Ruijiang Li, Ph.D. Department of Radiation Oncology Stanford University School of Medicine 2014 AAPM Therapy Educational Course Disclosure Research
Image Guidance and Beam Level Imaging in Digital Linacs Ruijiang Li, Ph.D. Department of Radiation Oncology Stanford University School of Medicine 2014 AAPM Therapy Educational Course Disclosure Research
MRI-Guided Prostate Motion Tracking using Multislice-to-Volume Registration
 MRI-Guided Prostate Motion Tracking using Multislice-to-Volume Registration by Hadi Tadayyon A thesis submitted to the Department of Electrical and Computer Engineering in conformity with the requirements
MRI-Guided Prostate Motion Tracking using Multislice-to-Volume Registration by Hadi Tadayyon A thesis submitted to the Department of Electrical and Computer Engineering in conformity with the requirements
Work Instruction Patient Visits
 THE UNIVERSITY OF TEXAS HEALTH SCIENCE CENTER AT SAN ANTONIO Work Instruction Patient Visits Velos - eresearch v10.0 Version: 1.0, 02/16/2018 Revision History Version/Amendment #: Version Date: Description:
THE UNIVERSITY OF TEXAS HEALTH SCIENCE CENTER AT SAN ANTONIO Work Instruction Patient Visits Velos - eresearch v10.0 Version: 1.0, 02/16/2018 Revision History Version/Amendment #: Version Date: Description:
Digital Content e-reader Features Overview
 Digital Content e-reader Features Overview Announcing the launch of our new digital content e-reader. This brief overview will demonstrate some of the most important features of our new e-reader. Once
Digital Content e-reader Features Overview Announcing the launch of our new digital content e-reader. This brief overview will demonstrate some of the most important features of our new e-reader. Once
Visage 7 Clinical Training Basic Features
 Visage 7 Clinical Training Basic Features Contents Overview... 4 Usage... 4 Client Server Architecture... 5 Client Login... 6 Study Browser... 7 Query Section... 8 Study Labels... 10 Query Labeled Studies...
Visage 7 Clinical Training Basic Features Contents Overview... 4 Usage... 4 Client Server Architecture... 5 Client Login... 6 Study Browser... 7 Query Section... 8 Study Labels... 10 Query Labeled Studies...
Automatic SPHARM Shape Analysis in 3D Slicer
 NA-MIC http://na-mic.org Automatic SPHARM Shape Analysis in 3D Slicer Corentin Hamel, Clement Vachet, Beatriz Paniagua, Nicolas Augier, Martin Styner University of North Carolina, Chapel Hill: Neuro Image
NA-MIC http://na-mic.org Automatic SPHARM Shape Analysis in 3D Slicer Corentin Hamel, Clement Vachet, Beatriz Paniagua, Nicolas Augier, Martin Styner University of North Carolina, Chapel Hill: Neuro Image
Introduction. Welcome to 3D Slicer! Surgical Planning Laboratory -1- Brigham and Women s Hospital
 Introduction Welcome to 3D Slicer! -1- Overview of Training What is Slicer? Uses of Slicer Getting Slicer How to Use Slicer Loading Data Viewing Data Modifying Data Saving Data -2- What is Slicer? -3-
Introduction Welcome to 3D Slicer! -1- Overview of Training What is Slicer? Uses of Slicer Getting Slicer How to Use Slicer Loading Data Viewing Data Modifying Data Saving Data -2- What is Slicer? -3-
By choosing to view this document, you agree to all provisions of the copyright laws protecting it.
 Copyright 2009 IEEE. Reprinted from 31 st Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2009. EMBC 2009. Sept. 2009. This material is posted here with permission
Copyright 2009 IEEE. Reprinted from 31 st Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2009. EMBC 2009. Sept. 2009. This material is posted here with permission
NIH Public Access Author Manuscript IEEE Int Conf Robot Autom. Author manuscript; available in PMC 2014 March 26.
 NIH Public Access Author Manuscript Published in final edited form as: IEEE Int Conf Robot Autom. 2013 December 31; 20132: 1228 1233. doi:10.1109/icra.2013.6630728. Towards Clinically Optimized MRI-guided
NIH Public Access Author Manuscript Published in final edited form as: IEEE Int Conf Robot Autom. 2013 December 31; 20132: 1228 1233. doi:10.1109/icra.2013.6630728. Towards Clinically Optimized MRI-guided
ECE1778 Final Report MRI Visualizer
 ECE1778 Final Report MRI Visualizer David Qixiang Chen Alex Rodionov Word Count: 2408 Introduction We aim to develop a mobile phone/tablet based neurosurgical MRI visualization application with the goal
ECE1778 Final Report MRI Visualizer David Qixiang Chen Alex Rodionov Word Count: 2408 Introduction We aim to develop a mobile phone/tablet based neurosurgical MRI visualization application with the goal
Prostate Detection Using Principal Component Analysis
 Prostate Detection Using Principal Component Analysis Aamir Virani (avirani@stanford.edu) CS 229 Machine Learning Stanford University 16 December 2005 Introduction During the past two decades, computed
Prostate Detection Using Principal Component Analysis Aamir Virani (avirani@stanford.edu) CS 229 Machine Learning Stanford University 16 December 2005 Introduction During the past two decades, computed
Brain Images. Download the data. Comparing Images. 13 th February Version 1.4. For GIMIAS-1.4. Contact:
 Brain Images Comparing Images 13 th February 2012 Version 1.4 For GIMIAS-1.4 Contact: cistib.developers@gmail.com The aim of this exercise is to show different visualization and fusion functionalities
Brain Images Comparing Images 13 th February 2012 Version 1.4 For GIMIAS-1.4 Contact: cistib.developers@gmail.com The aim of this exercise is to show different visualization and fusion functionalities
June 05, 2018, Version 3.0.6
 June 05, 2018, Version 3.0.6 VolViCon is an advanced application for reconstruction of computed tomography (CT), magnetic resonance (MR), ultrasound, and x-rays images. It gives features for exporting
June 05, 2018, Version 3.0.6 VolViCon is an advanced application for reconstruction of computed tomography (CT), magnetic resonance (MR), ultrasound, and x-rays images. It gives features for exporting
Vessel Explorer: a tool for quantitative measurements in CT and MR angiography
 Clinical applications Vessel Explorer: a tool for quantitative measurements in CT and MR angiography J. Oliván Bescós J. Sonnemans R. Habets J. Peters H. van den Bosch T. Leiner Healthcare Informatics/Patient
Clinical applications Vessel Explorer: a tool for quantitative measurements in CT and MR angiography J. Oliván Bescós J. Sonnemans R. Habets J. Peters H. van den Bosch T. Leiner Healthcare Informatics/Patient
HST.583 Functional Magnetic Resonance Imaging: Data Acquisition and Analysis
 MIT OpenCourseWare http://ocw.mit.edu Functional Magnetic Resonance Imaging: Data Acquisition and Analysis Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
MIT OpenCourseWare http://ocw.mit.edu Functional Magnetic Resonance Imaging: Data Acquisition and Analysis Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
Detecting White Matter Lesions in Lupus
 Slicer3 Training Compendium Detecting White Matter Lesions in Lupus Version 2.1 6/25/2009 H. Jeremy Bockholt Mark Scully -1- Learning objective This tutorial demonstrates an automated, multi-level method
Slicer3 Training Compendium Detecting White Matter Lesions in Lupus Version 2.1 6/25/2009 H. Jeremy Bockholt Mark Scully -1- Learning objective This tutorial demonstrates an automated, multi-level method
Computational Medical Imaging Analysis Chapter 4: Image Visualization
 Computational Medical Imaging Analysis Chapter 4: Image Visualization Jun Zhang Laboratory for Computational Medical Imaging & Data Analysis Department of Computer Science University of Kentucky Lexington,
Computational Medical Imaging Analysis Chapter 4: Image Visualization Jun Zhang Laboratory for Computational Medical Imaging & Data Analysis Department of Computer Science University of Kentucky Lexington,
SIVIC GUI Tutorial. HMTRC Workshop - March 23-24, 2017
 SIVIC GUI Tutorial HMTRC Workshop - March 23-24, 2017 Department of Radiology and Biomedical Imaging, UCSF Supported by NIBIB P41EB013598 Goal: The purpose of this tutorial is to introduce you to the SIVIC
SIVIC GUI Tutorial HMTRC Workshop - March 23-24, 2017 Department of Radiology and Biomedical Imaging, UCSF Supported by NIBIB P41EB013598 Goal: The purpose of this tutorial is to introduce you to the SIVIC
MicroMD EMR version 7.7
 MicroMD EMR version 7.7 u p d a t e g u i d e TABLE OF CONTENTS PREFACE Welcome to MicroMD EMR... i How This Guide is Organized... i Understanding Typographical Conventions... i Cross-References... i Text
MicroMD EMR version 7.7 u p d a t e g u i d e TABLE OF CONTENTS PREFACE Welcome to MicroMD EMR... i How This Guide is Organized... i Understanding Typographical Conventions... i Cross-References... i Text
Echo Blaster 64/128 and LogicScan 64/128 Series Ultrasound Systems Echo Wave II Software User Manual
 Echo Blaster 64/128 and LogicScan 64/128 Series Ultrasound Systems Echo Wave II Software User Manual Internet page: http://www.telemed.lt Information E-mail: info@telemed.lt Ultrasound Medical Systems
Echo Blaster 64/128 and LogicScan 64/128 Series Ultrasound Systems Echo Wave II Software User Manual Internet page: http://www.telemed.lt Information E-mail: info@telemed.lt Ultrasound Medical Systems
LAB DEMONSTRATION COMPUTED TOMOGRAPHY USING DESKCAT Lab Manual: 0
 LAB DEMONSTRATION COMPUTED TOMOGRAPHY USING DESKCAT Lab Manual: 0 Introduction This lab demonstration explores the physics and technology of Computed Tomography (CT) and guides the student and instructor
LAB DEMONSTRATION COMPUTED TOMOGRAPHY USING DESKCAT Lab Manual: 0 Introduction This lab demonstration explores the physics and technology of Computed Tomography (CT) and guides the student and instructor
Rev. 6. UroNav 1.2 Quick Reference Guide
 4535-303-72472 Rev. 6 UroNav 1.2 Quick Reference Guide UroNav Pre-Procedure Accessory component connections Ensure supply main cord and network cable are connected at the lower rear of the cart but main
4535-303-72472 Rev. 6 UroNav 1.2 Quick Reference Guide UroNav Pre-Procedure Accessory component connections Ensure supply main cord and network cable are connected at the lower rear of the cart but main
DeeControl User Manual
 The setup, service, and functions of the DeeControl slicing software DeeControl User Manual Version 1.1 - 2 - Content 2. Introduction...- 4-3. Minimum requirements...- 4-4. Installation...- 4-5. Launching
The setup, service, and functions of the DeeControl slicing software DeeControl User Manual Version 1.1 - 2 - Content 2. Introduction...- 4-3. Minimum requirements...- 4-4. Installation...- 4-5. Launching
MSI 2D Viewer Software Guide
 MSI 2D Viewer Software Guide Page:1 DISCLAIMER We have used reasonable effort to include accurate and up-to-date information in this manual; it does not, however, make any warranties, conditions or representations
MSI 2D Viewer Software Guide Page:1 DISCLAIMER We have used reasonable effort to include accurate and up-to-date information in this manual; it does not, however, make any warranties, conditions or representations
Access Groups. Collect and Store. Text Currency Date/Time. Tables Fields Data Type. You Your Friend Your Parent. Unique information
 Tutorial A database is a computerized record keeping system used to collect, store, analyze and report electronic information for a variety of purposes. Microsoft Access is a database. There are three
Tutorial A database is a computerized record keeping system used to collect, store, analyze and report electronic information for a variety of purposes. Microsoft Access is a database. There are three
LEAD LOCALIZATION. Version 1.0. Software User Guide Revision 1.1. Copyright 2018, Brainlab AG Germany. All rights reserved.
 LEAD LOCALIZATION Version 1.0 Software User Guide Revision 1.1 Copyright 2018, Brainlab AG Germany. All rights reserved. TABLE OF CONTENTS TABLE OF CONTENTS 1 GENERAL INFORMATION...5 1.1 Contact Data...5
LEAD LOCALIZATION Version 1.0 Software User Guide Revision 1.1 Copyright 2018, Brainlab AG Germany. All rights reserved. TABLE OF CONTENTS TABLE OF CONTENTS 1 GENERAL INFORMATION...5 1.1 Contact Data...5
Ambra User Guide. If you need help. Ambra Support (any time)
") If you need help Ambra Support 888 315 0790 (any time) support@ambrahealth.com Ambra User Guide Envision Radiology, a Health Images Organization, has provided a list of your site s personnel that need
If you need help Ambra Support 888 315 0790 (any time) support@ambrahealth.com Ambra User Guide Envision Radiology, a Health Images Organization, has provided a list of your site s personnel that need
Centralite CT Moving Laser Patient Positioning System (MRR-1)
") Centralite CT Moving Laser Patient Positioning System (MRR-1) Installation and Setup Manual DIACOR, INC. 2550 DECKER LAKE BLVD., SUITE 26, WEST VALLEY CITY, UTAH 84119 800 342-2679 / 801 467-0050 / 801
Centralite CT Moving Laser Patient Positioning System (MRR-1) Installation and Setup Manual DIACOR, INC. 2550 DECKER LAKE BLVD., SUITE 26, WEST VALLEY CITY, UTAH 84119 800 342-2679 / 801 467-0050 / 801
Systems Space Reservation
 Systems Space Reservation Preface Using This Guide What's New? Getting Started Enter the Workbench Create an Equipment Reservation Set Correct Working Units and Grid Changing the Current Axis Saving Documents
Systems Space Reservation Preface Using This Guide What's New? Getting Started Enter the Workbench Create an Equipment Reservation Set Correct Working Units and Grid Changing the Current Axis Saving Documents
Access Groups. Collect and Store. Text Currency Date/Time. Tables Fields Data Type. You Your Friend Your Parent. Unique information
 Tutorial A database is a computerized record keeping system used to collect, store, analyze and report electronic information for a variety of purposes. Microsoft Access is a database. There are three
Tutorial A database is a computerized record keeping system used to collect, store, analyze and report electronic information for a variety of purposes. Microsoft Access is a database. There are three
3D Slicer: A Free & Open Source Platform For Medical Image Analysis and Visualization. Brigham and Women s Hospital
 3D Slicer: A Free & Open Source Platform For Medical Image Analysis and Visualization Brigham and Women s Hospital 3D Slicer: An overview 3D Slicer is a multi-platform, free and open source software package
3D Slicer: A Free & Open Source Platform For Medical Image Analysis and Visualization Brigham and Women s Hospital 3D Slicer: An overview 3D Slicer is a multi-platform, free and open source software package
RT_Image v0.2β User s Guide
 RT_Image v0.2β User s Guide RT_Image is a three-dimensional image display and analysis suite developed in IDL (ITT, Boulder, CO). It offers a range of flexible tools for the visualization and quantitation
RT_Image v0.2β User s Guide RT_Image is a three-dimensional image display and analysis suite developed in IDL (ITT, Boulder, CO). It offers a range of flexible tools for the visualization and quantitation
Cleaver Lab Walkthrough
 Cleaver Lab Walkthrough Cleaver 2.0 Beta Documentation Center for Integrative Biomedical Computing Scientific Computing & Imaging Institute University of Utah Cleaver software download: http://software.sci.utah.edu
Cleaver Lab Walkthrough Cleaver 2.0 Beta Documentation Center for Integrative Biomedical Computing Scientific Computing & Imaging Institute University of Utah Cleaver software download: http://software.sci.utah.edu
Slicer3 Tutorial: Registration Library Case 08
 NA-MIC Slicer3 Tutorial: Registration Library Case 08 Serial PET-CT Dominik Meier, Ron Kikinis March 2010 Introduction / Scenario We have two sets of PET-CT scans, a baseline and follow-up scan. baseline
NA-MIC Slicer3 Tutorial: Registration Library Case 08 Serial PET-CT Dominik Meier, Ron Kikinis March 2010 Introduction / Scenario We have two sets of PET-CT scans, a baseline and follow-up scan. baseline
HHS Public Access Author manuscript Int J Med Robot. Author manuscript; available in PMC 2017 June 01.
 In-Bore Prostate Transperineal Interventions with an MRI-guided Parallel Manipulator: System Development and Preliminary Evaluation Sohrab Eslami *, Laboratory for Computational Sensing and Robotics (LCSR)
In-Bore Prostate Transperineal Interventions with an MRI-guided Parallel Manipulator: System Development and Preliminary Evaluation Sohrab Eslami *, Laboratory for Computational Sensing and Robotics (LCSR)
NIH Public Access Author Manuscript Proc SPIE. Author manuscript; available in PMC 2013 December 31.
 NIH Public Access Author Manuscript Published in final edited form as: Proc SPIE. 2013 March 8; 8671:. doi:10.1117/12.2008097. A Dynamic Dosimetry System for Prostate Brachytherapy Nathanael Kuo a, Ehsan
NIH Public Access Author Manuscript Published in final edited form as: Proc SPIE. 2013 March 8; 8671:. doi:10.1117/12.2008097. A Dynamic Dosimetry System for Prostate Brachytherapy Nathanael Kuo a, Ehsan
Bentley OpenRoads Workshop 2017 FLUG Fall Training Event
 Bentley OpenRoads Workshop 2017 FLUG Fall Training Event F-2P - QuickStart for Roadway Modeling in OpenRoads Technology Bentley Systems, Incorporated 685 Stockton Drive Exton, PA 19341 www.bentley.com
Bentley OpenRoads Workshop 2017 FLUG Fall Training Event F-2P - QuickStart for Roadway Modeling in OpenRoads Technology Bentley Systems, Incorporated 685 Stockton Drive Exton, PA 19341 www.bentley.com
CellaVision Proficiency Software
 CellaVision Proficiency USER S MANUAL 2.3 CellaVision Proficiency Preface CellaVision is a trademark of CellaVision AB. All other trademarks used in this document are property of their respective owners.
CellaVision Proficiency USER S MANUAL 2.3 CellaVision Proficiency Preface CellaVision is a trademark of CellaVision AB. All other trademarks used in this document are property of their respective owners.
Introduction to Digitization Techniques for Surgical Guidance
 Introduction to Digitization Techniques for Surgical Guidance Rebekah H. Conley, MS and Logan W. Clements, PhD Department of Biomedical Engineering Biomedical Modeling Laboratory Outline Overview of Tracking
Introduction to Digitization Techniques for Surgical Guidance Rebekah H. Conley, MS and Logan W. Clements, PhD Department of Biomedical Engineering Biomedical Modeling Laboratory Outline Overview of Tracking
Instructions for using Borg and Ide CONNECT. Referring Provider Portal. Version 3.5.
 Instructions for using Borg and Ide CONNECT Referring Provider Portal www.borgideconnect.com Version 3.5 Topic Table of Name Contents Description Getting Started...1 Home Page and Finding Patient Exams...2
Instructions for using Borg and Ide CONNECT Referring Provider Portal www.borgideconnect.com Version 3.5 Topic Table of Name Contents Description Getting Started...1 Home Page and Finding Patient Exams...2
Working with Charts Stratum.Viewer 6
 Working with Charts Stratum.Viewer 6 Getting Started Tasks Additional Information Access to Charts Introduction to Charts Overview of Chart Types Quick Start - Adding a Chart to a View Create a Chart with
Working with Charts Stratum.Viewer 6 Getting Started Tasks Additional Information Access to Charts Introduction to Charts Overview of Chart Types Quick Start - Adding a Chart to a View Create a Chart with
AdeptSight Pick-and-Place Tutorial
 AdeptSight Pick-and-Place Tutorial AdeptSight Pick-and-Place Tutorial This tutorial will walk you through the creation of a basic pick-and-place application for a single robot and single camera. This tutorial
AdeptSight Pick-and-Place Tutorial AdeptSight Pick-and-Place Tutorial This tutorial will walk you through the creation of a basic pick-and-place application for a single robot and single camera. This tutorial
C-mode Real Time Tomographic Reflection for a Matrix Array Ultrasound Sonic Flashlight
 C-mode Real Time Tomographic Reflection for a Matrix Array Ultrasound Sonic Flashlight George Stetten 1,2,3, Aaron Cois 1,2,, Wilson Chang 1,2,3, Damion Shelton 2, Robert Tamburo 1,2, John Castellucci
C-mode Real Time Tomographic Reflection for a Matrix Array Ultrasound Sonic Flashlight George Stetten 1,2,3, Aaron Cois 1,2,, Wilson Chang 1,2,3, Damion Shelton 2, Robert Tamburo 1,2, John Castellucci