Background Problem Statement Solution. Subsystem Videos Budget Timeline Remaining Tasks Responsibilities Special Thanks Questions
|
|
|
- Allan Golden
- 5 years ago
- Views:
Transcription
1


2 Background Problem Statement Solution Mechanical Areas of Interest Mounting Configuration Statics and Dynamics Focal Point of Dish Electrical Motors Sensors Software Controller SatPC32 Serial Communication Interpolation Calibration Techniques Subsystem Videos Budget Timeline Remaining Tasks Responsibilities Special Thanks Questions 2
 Solar Powered Utilizes GPS and")

3 CubeSat is 10cm x 10cm x 10cm (10cm 3.94 inches) Solar Powered Utilizes GPS and Celestial Navigation Techniques Transmits Information from Sensors Camera, UV/IR Spectrometer, Electron Flux 3



4 Lunar Lander Booster Rapid Prototype Models 3D Solid Model of CubeSat Structure 4
5 VTC developing CubeSat, transmits data Continuing where previous groups have left off Have to follow CubeSat to receive data (2.4gHz) Existing 3-meter parabolic dish antenna Low orbit satellite revolves around Earth in minutes, seen for short time per orbit 5
6 Track a low orbit satellite such as a CubeSat from horizon to horizon in as little as 30 seconds with an accuracy of ± /30 seconds=6 /sec Move a 3 meter satellite dish 360 Azimuth (left/right) 180 Elevation (up/down) Interface to PC running SatPC32 (Satellite Tracking Program) 6
7 Azimuth A left to right angle measurement from a fixed point (north in navigation) Elevation Angle between the flat plane and the object in the sky (satellite). 7





8 SatPC32 RS232 Micro- Controller EL - Motor Controller AZ - Motor Controller Limit Switches Position Encoders 8
9 Axis orientation (EL/AZ or AZ/EL) Weight of dish and Center of Mass Moment of Inertia of the dish Torque needed to spin/flip the Dish 9

10 Choosing a Solution: Two choices: Fork Mount and Equatorial mount Equatorial is accurate Fork is versatile 10
 is set parallel to the earths axis of rotation.")
11 Equatorial Mount: The movement of the Azimuth (here the Declination Axis) makes an arc in the sky. The Elevation (a) is set parallel to the earths axis of rotation. This system is much more accurate than the Fork and needs a much less complicated control system. 11

12 Fork Mount Simple left-right/up/down characteristics Allows the dish to go over backwards if it needs to. Dish can track large range of orbit paths. EL Axis We chose this configuration because of the versatility in what we can track AZ Axis 12

13 180 degree EL Motion 360 degree AZ Motion Approx weight: 1100 lbs 13


14 Tripod stand FEA Fork design FEA 14

15 15
16 Simple shaft and Bearing setup Load bearing Thrust and Ball Bearing setup 16

17 Load bearing Thrust and Ball Bearing setup 17




18 18
19 Statics and Dynamics: Key Points of Interest: Center of Mass- The mean location of all system masses. Moment of Inertia- A measure of an object's resistance to changes to its rotation. It is the inertia of a rotating body with respect to its rotation. Dynamic Torque- The torque encountered by a system that is not only in motion, but accelerating. Static Torque- The torque produced at constant velocity (rest or running). 19

20 This point is where we want our center of mass 20
 Reduces driving torque that the motor has to produce")
21 Having a balanced mass is very important in a motion system Balance (R o M = Rm) Reduces driving torque that the motor has to produce 21


22 Simple shaft and Bearing setup 22
23 Torque (ft-lb) Max Torque needed = 8.7 ft lbs EL Torque Data Time (s) 23
24 Torque (ft-lb) 3.5 Max Torque Needed = 3.3 ft lbs AZ Torque Graph Time (s) 24


25 Focal point calculated to be 37.5 inches from vertex of dish with a tolerance within

26 Transceiver Mount Must be Level 26


27 AC Power DC Power Signal Serial Indicator Light DC Motor PSU AZ-PWM Motor Controller EL-PWM Motor Controller AZ Motor EL Motor 120v AC 5vDC PSU Micro Angular Position Sensors 30 min Dish Heater 27

28 Absolute Magnetic Shaft Encoder 1 step size = at least nine bit resolution 2 9 = 512 steps 360 deg/512 steps =.7 deg/step 6 /sec = 1 rpm 180 /30sec=6 /sec=360 /60sec Magnetic shaft encoder Max 15,000 rpm Absolute position sensing Small size, large operating temperature range Analog output from 10-bit DAC 1024 steps or.35 /step 28

29 29

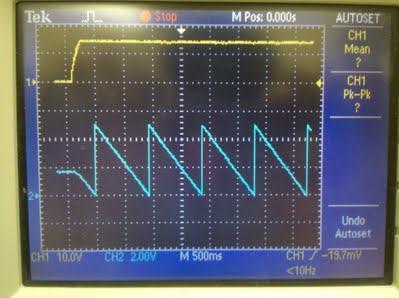
30 Time Constant 67ms 30
31 Im Pole-Zero Diagram: G s s PI.075( s 13.3) Z- Transform Equation: S-axis G c z z z 1 7 Difference Equation: Y c n X ( n) 7X ( n 1) Y ( n 1) c c c 31

32 32
33 33
34 Transmitted Format AZ360.0 EL180.0 Serial Transmit Rate 1 Data point/second 34
35 void check_serial(void){ CALLcheck_serial=0; switch(serial_state){ case 3: if (Serial_Error == ERR_OK){ if (Buffer_In == 'A'){ Serial_State = 4; } else { Serial_State = 3; } } break; //Look for 'A' 35
36 if (store_serial_az==1){ store_serial_az=0; for (i=numpos-1; i>0; i--){ Serial_AZ[i]=Serial_AZ[i-1]; } /*Pull Float from Incomming, put into Serial_AZ[0]*/ Serial_AZ[0]=0; Serial_AZ[0]=(float)(( ((Incomming[0]-48)*100)+ //convert from ASCII to decimal, 100's place ((Incomming[1]-48)*10 )+ //convert from ASCII to decimal, 10's place ((Incomming[2]-48)*1 )+ //convert from ASCII to decimal, 1's place //Incomming[3] = decimal point ((Incomming[4]-48)*.1 )+ //convert from ASCII to decimal,.1's place ((Incomming[5]-48)*.01)+0.48));//convert from ASCII to decimal,.01's place /*Pull Float from Incomming, put into Serial_AZ[0]*/ //ADD TO THE TIMER ARRAY TOO for (i=numpos-1; i>0; i--){ Serial_AZ_TIME[i]=Serial_AZ_TIME[i-1]; } Clock_Error=Clock_GetTimeMS(¤t_time); Serial_AZ_TIME[0]=(((float)(current_time))/1000); //ADD TO THE TIMER ARRAY TOO CALLcheck_interpolate=1; Serial_State = 3 Start Interpolating 36
37 37
38 void interpolate_serial(void){ switch(interpolate_state){ case 0: if (Serial_AZ[1] > 0){ dp = (Serial_AZ[0] - Serial_AZ[1]) * 0.1f; interpolate_out = dp + Serial_AZ[0]; interpolate_state = 1; } else interpolate_state = 0; break; //DEFINE CHANGE IN UNIT TIME HERE case 2: interpolate_clock_gettimems(&interpolate_time); if (interpolate_time >= INTDELAY){ interpolate_time = 0; interpolate_clock_reset(); interpolate_count--; interpolate_out = dp + interpolate_out; interpolate_state = 1; } else interpolate_state = 2; break; 38


39 Azimuth Align one leg of tripod to true north Elevation Inclinometer (Shown here) 39
40 Wall Mount laser on transceiver location Point to given spot and record location Attempt to recreate position Adjust accordingly 40


41 41

42 42

43 43

44 44

45 45

46 46

47 47

48 48

49 49


50 Click Film 50

51 Total $
")
52 Timeline (Rev 1.0)
53 Mechanical Weatherization Calibration Electrical Hardware User Interface Box Software Further (Redundant) Control Algorithm Testing 53
54 Areas of Responsibility Hodge (300+ Hours) CAD and FEA Torque Calculations/Measurements Ballast Implementation Motor Specifications Lyford (300+ Hours) Sensors and Electrical Fork Design w/ Motors Drive Mechanisms and Implementation Material Manager / Budget Schreiber (300+ Hours) Project Manager Mechanical Analysis and FEA Interpolation Implementation Communications Motor Controllers
55 Vermont Technical College Staff John Kidder - Use of Catamount Building Space Bryan Carroll - Use of Catamount Building Space Carl Wolf - FEA, General Project Guidance Andre St. Denis - Software Support, General Project Guidance John Murphy - Controller Development, Software and Hardware Support Ingred Van-Steamburg - Ordering Parts, Budget Allocation, Financial Assistance Preston Allen - Supplying Tools and Machinery, Assembly and Construction Assistance Joan Richmond-Hall - Materials Safety Precautions Roger Howes - CNC Support Mike Wright Machine Shop Assistance Scott Sabol - Green Structural Building Analysis Sam Colwell - LCD Software Support Vermont Technical College Students Aaron Minard - Briefing from previous years Ben (Student in Design Comm. Class) - Solidworks Models of Motors Outside Vermont Technical College David Durgin of Mainly Metals - Water-jet parts K BeBee Plumbing - Supplying Free Material Vermont Wireform - CNC/Machine Shop and Machine Time Mark Schreiber of Granite City Electric - Delivering Material, Providing Dish Heater 55
56
 - Enter the door by")
57 - From VTC, Continue down Rte.66 - Take a Left at the Aadco Medical sign (VTC s logo also on the sign) - Enter the door by the garage door with VTC s logo We will be leaving in 15 minutes 57
AMG Series. Motorized Position and Rate Gimbals. Continuous 360 rotation of azimuth and elevation including built-in slip ring
 AMG Series Optical Mounts AMG Series Motorized Position and Rate Gimbals Continuous rotation of azimuth and elevation including built-in slip ring High accuracy angular position and rate capability Direct-drive
AMG Series Optical Mounts AMG Series Motorized Position and Rate Gimbals Continuous rotation of azimuth and elevation including built-in slip ring High accuracy angular position and rate capability Direct-drive
GAOTek Vibration Meter with 2 Channel (High-Quality Accelerometer)
") GAOTek Vibration Meter with 2 Channel (High-Quality Accelerometer) GAOTek Vibration Meter with 2 Channel (High- Quality Accelerometer) is used for measuring periodic motion to check the imbalance and deflection
GAOTek Vibration Meter with 2 Channel (High-Quality Accelerometer) GAOTek Vibration Meter with 2 Channel (High- Quality Accelerometer) is used for measuring periodic motion to check the imbalance and deflection
Mirror positioning on your fingertip. Embedded controller means tiny size plus fast, easy integration. Low power for hand-held systems
 SMALL, PRECISE, SMART IN MOTION DK-M3-RS-U-1M-20 Developer s Kit Single-Axis Mirror Positioning System Miniature piezo smart stage with built-in controller for simple, precise point-to-point positioning
SMALL, PRECISE, SMART IN MOTION DK-M3-RS-U-1M-20 Developer s Kit Single-Axis Mirror Positioning System Miniature piezo smart stage with built-in controller for simple, precise point-to-point positioning
Pen Vibration Meter. User's Guide. Model VB Washington Street Melrose, MA Phone Toll Free
 User's Guide 99 Washington Street Melrose, MA 02176 Phone 781-665-1400 Toll Free 1-800-517-8431 Visit us at www.testequipmentdepot.com Pen Vibration Meter Model VB400 Introduction Congratulations on your
User's Guide 99 Washington Street Melrose, MA 02176 Phone 781-665-1400 Toll Free 1-800-517-8431 Visit us at www.testequipmentdepot.com Pen Vibration Meter Model VB400 Introduction Congratulations on your
Datasheet 2102 SERIES TWO-AXIS POSITIONING AND RATE TABLE SYSTEM
 Datasheet 2102 SERIES TWO-AXIS POSITIONING AND RATE TABLE SYSTEM FEATURES Position Accuracy: ± 30 arc seconds (both axes) Rate Accuracy: ± 0.01% Max Rate (varies depending on axis configuration): Inner
Datasheet 2102 SERIES TWO-AXIS POSITIONING AND RATE TABLE SYSTEM FEATURES Position Accuracy: ± 30 arc seconds (both axes) Rate Accuracy: ± 0.01% Max Rate (varies depending on axis configuration): Inner
Paramount Robotic Telescope Mount Specifications
 Paramount Robotic Telescope Mount Specifications The Paramount Robotic German equatorial telescope mount is available in three models to suit your needs. The portable Paramount MYT carries 10-in. (0.25
Paramount Robotic Telescope Mount Specifications The Paramount Robotic German equatorial telescope mount is available in three models to suit your needs. The portable Paramount MYT carries 10-in. (0.25
Line of Sight Stabilization Primer Table of Contents
 Line of Sight Stabilization Primer Table of Contents Preface 1 Chapter 1.0 Introduction 3 Chapter 2.0 LOS Control Architecture and Design 11 2.1 Direct LOS Stabilization 15 2.2 Indirect LOS Stabilization
Line of Sight Stabilization Primer Table of Contents Preface 1 Chapter 1.0 Introduction 3 Chapter 2.0 LOS Control Architecture and Design 11 2.1 Direct LOS Stabilization 15 2.2 Indirect LOS Stabilization
SPID Azimuth & Elevation antenna rotator P/N: BIG-RAS/HR
 Gauke Boelensstraat 108 NL-9203 RS Drachten The Netherlands Tel: +31 (0) 512 354 126 GSM: +31 (0) 650 882 889 Fax: +31 (0) 847 187 776 www.rfhamdesign.com E-mail: info@rfhamdesign.com SPID Azimuth & Elevation
Gauke Boelensstraat 108 NL-9203 RS Drachten The Netherlands Tel: +31 (0) 512 354 126 GSM: +31 (0) 650 882 889 Fax: +31 (0) 847 187 776 www.rfhamdesign.com E-mail: info@rfhamdesign.com SPID Azimuth & Elevation
Field Service Procedure Replacement Azimuth Motor Kit, 3011
 1. Brief Summary: Troubleshooting document for diagnosing a fault with and replacing the azimuth motor on the 3011 antenna. 2. Checklist: Verify Initialization MDE Status LED Pedestal Error Verify Encoder
1. Brief Summary: Troubleshooting document for diagnosing a fault with and replacing the azimuth motor on the 3011 antenna. 2. Checklist: Verify Initialization MDE Status LED Pedestal Error Verify Encoder
Smartphone Video Guidance Sensor for Small Satellites
 SSC13-I-7 Smartphone Video Guidance Sensor for Small Satellites Christopher Becker, Richard Howard, John Rakoczy NASA Marshall Space Flight Center Mail Stop EV42, Huntsville, AL 35812; 256-544-0114 christophermbecker@nasagov
SSC13-I-7 Smartphone Video Guidance Sensor for Small Satellites Christopher Becker, Richard Howard, John Rakoczy NASA Marshall Space Flight Center Mail Stop EV42, Huntsville, AL 35812; 256-544-0114 christophermbecker@nasagov
High Performance, Full-Digital Control on the LMT and KVN Telescopes
 High Performance, Full-Digital Control on the LMT and KVN Telescopes David R. Smith (MERLAB), alpha@merlab.com Kamal Souccar (UMass), David Gale (INAOE), F. Peter Schloerb (Umass), David Hughes (INAOE)
High Performance, Full-Digital Control on the LMT and KVN Telescopes David R. Smith (MERLAB), alpha@merlab.com Kamal Souccar (UMass), David Gale (INAOE), F. Peter Schloerb (Umass), David Hughes (INAOE)
DRIACS-G2. Tracking the moon and celestial bodies without PC. Antenna Control System Generation II by Alex Artieda, HB9DRI
 DRIACS-G2 Antenna Control System Generation II by Tracking the moon and celestial bodies without PC 1 Agenda Tracking the Moon dilemma: PC or not PC The first ACS by OE5JFL The DRIACS-G2 The Microcontroller
DRIACS-G2 Antenna Control System Generation II by Tracking the moon and celestial bodies without PC 1 Agenda Tracking the Moon dilemma: PC or not PC The first ACS by OE5JFL The DRIACS-G2 The Microcontroller
HD25A. Absolute Industrial Rugged Metal Optical Encoder Absolute Industrial Rugged Metal Optical Encoder, Page 1 of 5. Description.
 Description HD25A, Page 1 of 5 The HD25A is a NEMA 25 sized absolute encoder designed for industrial applications. The HD25A optical encoder is a 12-bit absolute rotary position sensor, which reports a
Description HD25A, Page 1 of 5 The HD25A is a NEMA 25 sized absolute encoder designed for industrial applications. The HD25A optical encoder is a 12-bit absolute rotary position sensor, which reports a
Geometry Measurements
 Geometry Measurements Welcome to our world Since the very beginning in 1984, ACOEM AB has helped industries throughout the world to achieve more profitable and sustainable production. We have reached where
Geometry Measurements Welcome to our world Since the very beginning in 1984, ACOEM AB has helped industries throughout the world to achieve more profitable and sustainable production. We have reached where
XSLIDE. XSlide Positioning System. Manual and Motorized. Compact Positioning Stage. Long life, precise movement, greater value
 XSlide Positioning System Long life, precise movement, greater value Manual and Motorized Compact Positioning Stage XSLIDE Ideal for limited space applications Velmex Versatility Velmex positioning products
XSlide Positioning System Long life, precise movement, greater value Manual and Motorized Compact Positioning Stage XSLIDE Ideal for limited space applications Velmex Versatility Velmex positioning products
ALAR Series. Direct Drive, Large-Aperture, Rotary Stage. 5 different aperture sizes: 100 mm, 150 mm, 200 mm, 250 mm, 325 mm
 LR Series Rotary Stages LR Series Direct Drive, Large-perture, Rotary Stage 5 different aperture sizes: mm, 150 mm, 00 mm, 50 mm, 35 mm Continuous or limited travel High axial load capacity of 300-0 lb
LR Series Rotary Stages LR Series Direct Drive, Large-perture, Rotary Stage 5 different aperture sizes: mm, 150 mm, 00 mm, 50 mm, 35 mm Continuous or limited travel High axial load capacity of 300-0 lb
Navigational Aids 1 st Semester/2007/TF 7:30 PM -9:00 PM
 Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
ALAR Series. Direct Drive, Large-Aperture, Rotary Stage. 5 different aperture sizes: 100 mm, 150 mm, 200 mm, 250 mm, 325 mm
 LR Series Rotary Stages LR Series Direct Drive, Large-perture, Rotary Stage 5 different aperture sizes: 100 mm, 150 mm, 200 mm, 250 mm, 325 mm Continuous or limited travel High axial load capacity of 300-1000
LR Series Rotary Stages LR Series Direct Drive, Large-perture, Rotary Stage 5 different aperture sizes: 100 mm, 150 mm, 200 mm, 250 mm, 325 mm Continuous or limited travel High axial load capacity of 300-1000
Astromechanics. 12. Satellite Look Angle
 Astromechanics 12. Satellite Look Angle The satellite look angle refers to the angle that one would look for a satellite at a given time from a specified position on the Earth. For example, if you had
Astromechanics 12. Satellite Look Angle The satellite look angle refers to the angle that one would look for a satellite at a given time from a specified position on the Earth. For example, if you had
ECS servo system MCS servo motors
 ECS servo system MCS servo motors for multi-axis applications Lenze Global Drive dynamic, powerful, compact ECS, MCS dynamic, powerful, compact The ECS servo system Servo drives with a high overload capacity
ECS servo system MCS servo motors for multi-axis applications Lenze Global Drive dynamic, powerful, compact ECS, MCS dynamic, powerful, compact The ECS servo system Servo drives with a high overload capacity
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology. MDrive 34 Hybrid Step Torque Speed
 MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 34 Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo applications
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 34 Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo applications
The Paramount MYT Robotic Telescope Mount
 The Paramount MYT Robotic Telescope Mount The Paramount MYT (pronounced mighty ) Robotic Telescope Mount is a German equatorial mount designed from the base up to provide unsurpassed stability and performance
The Paramount MYT Robotic Telescope Mount The Paramount MYT (pronounced mighty ) Robotic Telescope Mount is a German equatorial mount designed from the base up to provide unsurpassed stability and performance
Conceptual-Level Cost Estimate for Point Design of a 30-m Giant Segmented Mirror Telescope (GSMT)
") Conceptual-Level Cost Estimate for Point Design of a 30-m Giant Segmented Mirror Telescope (GSMT) ALL INFORMATION HEREIN IS COPYRIGHTED AND PROVIDED TO NOAO, AURA FOR ITS USE FOR NON-COMMERCIAL RESEARCH
Conceptual-Level Cost Estimate for Point Design of a 30-m Giant Segmented Mirror Telescope (GSMT) ALL INFORMATION HEREIN IS COPYRIGHTED AND PROVIDED TO NOAO, AURA FOR ITS USE FOR NON-COMMERCIAL RESEARCH
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Read Me. Table of Contents
 Read Me 10/07/2005: Note that the DataStorm Administrator will NOT WORK with the current release of DataStorm D3 code [v3.7.8] 10/07/2005: Please refer to the D3 Changelog notes for more information on
Read Me 10/07/2005: Note that the DataStorm Administrator will NOT WORK with the current release of DataStorm D3 code [v3.7.8] 10/07/2005: Please refer to the D3 Changelog notes for more information on
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology. MDrive 23 Hybrid Motion Control
 MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 23 Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo applications
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 23 Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo applications
MDrive Plus Stepper motors with integrated electronics. MDrive 34ac Plus Motion Control fully programmable
 MDrive Plus Stepper motors with integrated electronics MDrive 34ac Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
MDrive Plus Stepper motors with integrated electronics MDrive 34ac Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
PCL40. PCL40 Linear Stage. PCL40 with 400 mm travel
 PCL4 Linear Stage PCL4 PCL4 with 4 mm travel Features Travel to 4mm Optional rotary encoder resolution to 1. micron 1 kg payload capacity Two motor options Limit sensors 4mm tall single axis, 8mm tall
PCL4 Linear Stage PCL4 PCL4 with 4 mm travel Features Travel to 4mm Optional rotary encoder resolution to 1. micron 1 kg payload capacity Two motor options Limit sensors 4mm tall single axis, 8mm tall
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology. MDrive 34 Hybrid Step Torque Speed
 MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 34 Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo applications
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 34 Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo applications
PWB Calibration Software for Encoders
 PWB Calibration Software for Encoders (GUI Version 2.3) User Manual AS25/50 V2.3 1/13 PWB Encoders GmbH 1 Introduction Thank you for purchasing a product from PWB Encoders! Our Mini-Encoders, Encoder Wheels,
PWB Calibration Software for Encoders (GUI Version 2.3) User Manual AS25/50 V2.3 1/13 PWB Encoders GmbH 1 Introduction Thank you for purchasing a product from PWB Encoders! Our Mini-Encoders, Encoder Wheels,
RC3KD TriKit RC3000D to ANDREW Trifold Interface Kit. Installation Manual
 RC3KD TriKit RC3000D to ANDREW Trifold Interface Kit Installation Manual 26 March 2008 RESEARCH CONCEPTS INC. 5420 Martindale Shawnee, KS 66218 (913)422-0210 www.researchconcepts.com TABLE OF CONTENTS
RC3KD TriKit RC3000D to ANDREW Trifold Interface Kit Installation Manual 26 March 2008 RESEARCH CONCEPTS INC. 5420 Martindale Shawnee, KS 66218 (913)422-0210 www.researchconcepts.com TABLE OF CONTENTS
MX80S Ballscrew and Leadscrew Driven Stages
 Miniature MX80S Features MX80S Ballscrew and Leadscrew Driven Stages Features Miniature Size - Low Profile (35 mm high X 80 mm wide) Normal or cleanroom environments 25, 50,, 150 mm travels Multi-axis
Miniature MX80S Features MX80S Ballscrew and Leadscrew Driven Stages Features Miniature Size - Low Profile (35 mm high X 80 mm wide) Normal or cleanroom environments 25, 50,, 150 mm travels Multi-axis
Meeting Date: February 12, Meeting Location: Building 78 Room Meeting time: 8:00 10:00 AM. Timeline:
 Agenda Meeting Purpose Detailed design review of P10543 Update of color measurement system. The objective of this technical review is to conduct an evaluation of the proposed design solution and to identify
Agenda Meeting Purpose Detailed design review of P10543 Update of color measurement system. The objective of this technical review is to conduct an evaluation of the proposed design solution and to identify
MDrive Plus Stepper motors with integrated electronics. MDrive 34 Plus Motion Control fully programmable
 MDrive Plus Stepper motors with integrated electronics MDrive 34 Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
MDrive Plus Stepper motors with integrated electronics MDrive 34 Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology. MDrive 17 Hybrid Motion Control
 MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 17 Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo applications
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 17 Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo applications
Multiturn Kit Encoders Without Batteries or Gears: A Cost-Efficient Approach for Rotary Position Measurement in Servomotors and Rotating Equipment
 Multiturn Kit Encoders Without Batteries or Gears: A Cost-Efficient Approach for Rotary Position Measurement in Servomotors and Rotating Equipment POSITAL is introducing a new set of componentlevel products
Multiturn Kit Encoders Without Batteries or Gears: A Cost-Efficient Approach for Rotary Position Measurement in Servomotors and Rotating Equipment POSITAL is introducing a new set of componentlevel products
Preliminary Datasheet MX Axis Stepper Drive with Breakout Board & I/O s. Preliminary V1.0
 Preliminary Datasheet MX4660 4-Axis Stepper Drive with Breakout Board & I/O s Preliminary V1.0 Features Power up to 4 stepper motors of NEMA 17, 23, 24, or 34 Sophisticated stepper motor control based
Preliminary Datasheet MX4660 4-Axis Stepper Drive with Breakout Board & I/O s Preliminary V1.0 Features Power up to 4 stepper motors of NEMA 17, 23, 24, or 34 Sophisticated stepper motor control based
Arduino Uno. Power & Interface. Arduino Part 1. Introductory Medical Device Prototyping. Digital I/O Pins. Reset Button. USB Interface.
 Introductory Medical Device Prototyping Arduino Part 1, http://saliterman.umn.edu/ Department of Biomedical Engineering, University of Minnesota Arduino Uno Power & Interface Reset Button USB Interface
Introductory Medical Device Prototyping Arduino Part 1, http://saliterman.umn.edu/ Department of Biomedical Engineering, University of Minnesota Arduino Uno Power & Interface Reset Button USB Interface
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology. MDrive 34ac Hybrid Step Torque Speed
 MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 34ac Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 34ac Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo
Micro-Radian Instruments, 485 W. Horton Road, Bellingham, WA USA.
 TL40 Digital Autocollimator Data Sheet (22 April 2013) 1.0 Introduction The TL40 Optical Head is designed for use with the E3 Digital Controller. Together they form a stand alone high performance dual
TL40 Digital Autocollimator Data Sheet (22 April 2013) 1.0 Introduction The TL40 Optical Head is designed for use with the E3 Digital Controller. Together they form a stand alone high performance dual
PSGP310. Personal GPS Training Watch. Quick Start Guide
 PSGP310 Personal GPS Training Watch Quick Start Guide 1 What is GPS? The Global Positioning System (GPS) is a space-based satellite navigation system that provides location and time information in all
PSGP310 Personal GPS Training Watch Quick Start Guide 1 What is GPS? The Global Positioning System (GPS) is a space-based satellite navigation system that provides location and time information in all
1.8 METER SERIES 1194 ANTENNA SYSTEM
 April 20, 2016 REVISION J ASSEMBLY MANUAL 1.8 METER SERIES 1194 ANTENNA SYSTEM General Dynamics SATCOM Technologies 1700 Cable Drive NE Conover NC 28613 USA Phone 770-689-2040 www.gdsatcom.com 1.8 METER
April 20, 2016 REVISION J ASSEMBLY MANUAL 1.8 METER SERIES 1194 ANTENNA SYSTEM General Dynamics SATCOM Technologies 1700 Cable Drive NE Conover NC 28613 USA Phone 770-689-2040 www.gdsatcom.com 1.8 METER
Electric Press Work Station Product Line
 Electric Press Work Station Product Line 2 Fully Electric Work Stations The Work Station is a stand-alone unit with a Promess precision servo driven ball screw press (EMAP) and motion controller. The system
Electric Press Work Station Product Line 2 Fully Electric Work Stations The Work Station is a stand-alone unit with a Promess precision servo driven ball screw press (EMAP) and motion controller. The system
Micro-Radian Instruments, 485 W. Horton Road, Bellingham, WA USA
 TL100D Autocollimator Data Sheet (6 April 2018) 1.0 Introduction The TL100D is a compact digital autocollimator designed for use with a computer. Power input and data output are via a single USB 2.0 connection.
TL100D Autocollimator Data Sheet (6 April 2018) 1.0 Introduction The TL100D is a compact digital autocollimator designed for use with a computer. Power input and data output are via a single USB 2.0 connection.
RF TARGET AND DECOY SIMULATOR
 RF TARGET AND DECOY SIMULATOR David Wayne dwayne@mi-technologies.com Anil Tellakula, George Cawthon, Jim Langston, Charles Pinson, Makary Awadalla MI Technologies, 1125 Satellite Boulevard, Suite 100,
RF TARGET AND DECOY SIMULATOR David Wayne dwayne@mi-technologies.com Anil Tellakula, George Cawthon, Jim Langston, Charles Pinson, Makary Awadalla MI Technologies, 1125 Satellite Boulevard, Suite 100,
PosiStep - Single Axis Packaged Intelligent Microstepping Drive
 Precision Motion Control Brushless Motors Stepper Motors AC Synchronous DC Servo Motors Gearheads Encoders Systems Fieldbus Gateways CAM Control Mechanical Integration PosiStep - Single Axis Packaged Intelligent
Precision Motion Control Brushless Motors Stepper Motors AC Synchronous DC Servo Motors Gearheads Encoders Systems Fieldbus Gateways CAM Control Mechanical Integration PosiStep - Single Axis Packaged Intelligent
bidirectionally as well as the rotation sense of shafts. With absolute encoders instead, each incremental
 and draw-wire sensors Spot-on and trailblazing technology measure rotation speed, sense, position, angle and length. For this purpose, they convert mechanical motion in electrical signals. There are incremental
and draw-wire sensors Spot-on and trailblazing technology measure rotation speed, sense, position, angle and length. For this purpose, they convert mechanical motion in electrical signals. There are incremental
1 in = 25.4 mm 1 m = ft g = 9.81 m/s 2
 ENGR 122 Section Instructor: Name: Form#: 52 Allowed materials include calculator (without wireless capability), pencil or pen. Honor Statement: On my honor, I promise that I have not received any outside
ENGR 122 Section Instructor: Name: Form#: 52 Allowed materials include calculator (without wireless capability), pencil or pen. Honor Statement: On my honor, I promise that I have not received any outside
Rotator Genius Instruction Manual v1.3.3
 Rotator Genius Instruction Manual v1.3.3 OVERVIEW Device connection overview 4O3A Signature Rotator Genius is a smart, high integration rotator controller. It uses an electromagnetic sensor for reading
Rotator Genius Instruction Manual v1.3.3 OVERVIEW Device connection overview 4O3A Signature Rotator Genius is a smart, high integration rotator controller. It uses an electromagnetic sensor for reading
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
NEMA 17, NEMA 23 and NEMA 34
 Integrated Closed Loop Stepper Motor Datasheet Rev. 5.3 NEMA 17, NEMA 23 and NEMA 34 Power, Nominal (±10%) Auxiliary Power, Nominal (±10%) Auxiliary Power, Maximum IP 20 IP20 IP65 IP20 IP65 NEMA 17S 17M
Integrated Closed Loop Stepper Motor Datasheet Rev. 5.3 NEMA 17, NEMA 23 and NEMA 34 Power, Nominal (±10%) Auxiliary Power, Nominal (±10%) Auxiliary Power, Maximum IP 20 IP20 IP65 IP20 IP65 NEMA 17S 17M
Field Service Procedure Level Cage Motor Kit, XX06, XX06R, XX06RZ, XX06RZA, XX97, XX97A, XX97B, XX00, XX00B & XX07
 1. Brief Summary: Troubleshooting document for diagnosing a fault with and replacing the level cage motor on the XX06 & XX97, XX97A, XX97B, XX00, XX00B & XX07 series antennas. 2. Checklist: Verify Initialization
1. Brief Summary: Troubleshooting document for diagnosing a fault with and replacing the level cage motor on the XX06 & XX97, XX97A, XX97B, XX00, XX00B & XX07 series antennas. 2. Checklist: Verify Initialization
TESTSAT STRUCTURE AND INTERFACE DESIGN & FABRICATION. Jonathan R. Chinen College of Engineering University of Hawai i at Mānoa Honolulu, HI 96822
 TESTSAT STRUCTURE AND INTERFACE DESIGN & FABRICATION Jonathan R. Chinen College of Engineering University of Hawai i at Mānoa Honolulu, HI 96822 ABSTRACT Under the Hawai i Space Flight Laboratory (HSFL),
TESTSAT STRUCTURE AND INTERFACE DESIGN & FABRICATION Jonathan R. Chinen College of Engineering University of Hawai i at Mānoa Honolulu, HI 96822 ABSTRACT Under the Hawai i Space Flight Laboratory (HSFL),
DSP-BASED MOTOR CONTROLLER FOR THREE-PHASE BRUSHLESS DC MOTORS
 DSP-BASED MOTOR CONTROLLER FOR THREE-PHASE BRUSHLESS DC MOTORS FEATURES / BENEFITS Embedded Motor Control DSP (ADMCF328) improves higher level system integration and flexibility 7A phase current (cycle-by-cycle
DSP-BASED MOTOR CONTROLLER FOR THREE-PHASE BRUSHLESS DC MOTORS FEATURES / BENEFITS Embedded Motor Control DSP (ADMCF328) improves higher level system integration and flexibility 7A phase current (cycle-by-cycle
Product description for ED1600 generic Sigfox Module
 Product description for ED1600 generic Sigfox Module The ED1600 Sigfox Module is mainly developed for container tracking purposes. To avoid the development of many different types of modules and just as
Product description for ED1600 generic Sigfox Module The ED1600 Sigfox Module is mainly developed for container tracking purposes. To avoid the development of many different types of modules and just as
Introduction to Solid Modeling Using SolidWorks 2008 COSMOSMotion Tutorial Page 1
 Introduction to Solid Modeling Using SolidWorks 2008 COSMOSMotion Tutorial Page 1 In this tutorial, we will learn the basics of performing motion analysis using COSMOSMotion. Although the tutorial can
Introduction to Solid Modeling Using SolidWorks 2008 COSMOSMotion Tutorial Page 1 In this tutorial, we will learn the basics of performing motion analysis using COSMOSMotion. Although the tutorial can
TMS 9000 Series Torque Measurement System DIGITAL TELEMETRY DESIGNED FOR TODAY & TOMORROW
 TMS 9000 Series Torque Measurement System DIGITAL TELEMETRY DESIGNED FOR TODAY & TOMORROW DESIGNED FOR TODAY S APPLICATIONS AND TOMORROW S TESTING INNOVATIVE SOLUTIONS FOR ROTATING TORQUE MEASUREMENT The
TMS 9000 Series Torque Measurement System DIGITAL TELEMETRY DESIGNED FOR TODAY & TOMORROW DESIGNED FOR TODAY S APPLICATIONS AND TOMORROW S TESTING INNOVATIVE SOLUTIONS FOR ROTATING TORQUE MEASUREMENT The
HMR3200/HMR3300 APPLICATIONS. Features. General Description. Block Diagram. Compassing & Navigation. Attitude Reference. Satellite Antenna Positioning
 Features 1 Heading Accuracy, 0.1 Resolution 0.5 Repeatability 60 Tilt Range (Pitch and Roll) for Small Size (1.0 x 1.45 x 0.4 ), Light Weight Compensation for Hard Iron Distortions, Ferrous Objects, Stray
Features 1 Heading Accuracy, 0.1 Resolution 0.5 Repeatability 60 Tilt Range (Pitch and Roll) for Small Size (1.0 x 1.45 x 0.4 ), Light Weight Compensation for Hard Iron Distortions, Ferrous Objects, Stray
Attitude Control for Small Satellites using Control Moment Gyros
 Attitude Control for Small Satellites using Control Moment Gyros V Lappas a, Dr WH Steyn b, Dr CI Underwood c a Graduate Student, University of Surrey, Guildford, Surrey GU 5XH, UK b Professor, University
Attitude Control for Small Satellites using Control Moment Gyros V Lappas a, Dr WH Steyn b, Dr CI Underwood c a Graduate Student, University of Surrey, Guildford, Surrey GU 5XH, UK b Professor, University
Rotary Position Technology Incremental Encoders
 -40 to 85 C IP Safety-Lock High rotational speed Temperature High IP High shaft load capacity Shock/vibration resistant Magnetic field proof Short-circuit proof Reverse polarity protection Optical sensor
-40 to 85 C IP Safety-Lock High rotational speed Temperature High IP High shaft load capacity Shock/vibration resistant Magnetic field proof Short-circuit proof Reverse polarity protection Optical sensor
ACCREDITED SOLUTION. EXPLORER CPN Enclosure
 ACCREDITED SOLUTION EXPLORER CPN Enclosure Document Name: EXPLORER - CPN Enclosure Revision: G Introduction: Typical Applications: Product Description: This document describes step-by-step how to mount
ACCREDITED SOLUTION EXPLORER CPN Enclosure Document Name: EXPLORER - CPN Enclosure Revision: G Introduction: Typical Applications: Product Description: This document describes step-by-step how to mount
Datasheet MX Axis Stepper Drive with Breakout Board & I/O s. Version1.0
 Datasheet MX3660 3-Axis Stepper Drive with Breakout Board & I/O s Version1.0 1. Features Power up to 3 stepper motors of NEMA 17, 23, 24, or 34 Sophisticated stepper motor control based on latest DSP technology
Datasheet MX3660 3-Axis Stepper Drive with Breakout Board & I/O s Version1.0 1. Features Power up to 3 stepper motors of NEMA 17, 23, 24, or 34 Sophisticated stepper motor control based on latest DSP technology
History of Boeing (CMG) Control Moment Gyros
 Control Moment Gyros") History of Boeing (CMG) Control Moment Gyros (COFE7) Seventh International Conference On Future Energy BOEING 15-00051-EOT Mike Gamble 10/7/14 BOEING is a trademark of Boeing Management Company. EOT_RT_template.ppt
History of Boeing (CMG) Control Moment Gyros (COFE7) Seventh International Conference On Future Energy BOEING 15-00051-EOT Mike Gamble 10/7/14 BOEING is a trademark of Boeing Management Company. EOT_RT_template.ppt
Linear Positioning Stage Reference Manual
 PP-30 Series Linear Positioning Stage PP-30 Piezo Positioner Stage Rev 3.00 MICRONIX USA, LLC 15375 Barranca Parkway, E-106 Irvine, CA 92618 Tel: 949-480-0538 Fax: 949-480-0538 Email: info@micronixusa.com
PP-30 Series Linear Positioning Stage PP-30 Piezo Positioner Stage Rev 3.00 MICRONIX USA, LLC 15375 Barranca Parkway, E-106 Irvine, CA 92618 Tel: 949-480-0538 Fax: 949-480-0538 Email: info@micronixusa.com
Engineering Requirements
 Agenda System Overview Engineering Requirements Updates Test Plan Functional Decomp and System Architecture Benchmarking Motors/actuators Controllers Engineering Analysis (Feasibility) Various Analysis
Agenda System Overview Engineering Requirements Updates Test Plan Functional Decomp and System Architecture Benchmarking Motors/actuators Controllers Engineering Analysis (Feasibility) Various Analysis
THE UNIVERSITY OF AUCKLAND
 THE UNIVERSITY OF AUCKLAND FIRST SEMESTER, 2002 Campus: Tamaki COMPUTER SCIENCE Intelligent Active Vision (Time allowed: TWO hours) NOTE: Attempt questions A, B, C, D, E, and F. This is an open book examination.
THE UNIVERSITY OF AUCKLAND FIRST SEMESTER, 2002 Campus: Tamaki COMPUTER SCIENCE Intelligent Active Vision (Time allowed: TWO hours) NOTE: Attempt questions A, B, C, D, E, and F. This is an open book examination.
Datasheet 1270VS SINGLE-AXIS RATE TABLE
 Datasheet 1270VS SINGLE-AXIS RATE TABLE STANDARD FEATURES Variable Speed Design RS-232 Interface Monitor Actual Speed with LCD Display 0.1% Speed Accuracy Bi-Directional 16 Line User Slip Ring (See Options)
Datasheet 1270VS SINGLE-AXIS RATE TABLE STANDARD FEATURES Variable Speed Design RS-232 Interface Monitor Actual Speed with LCD Display 0.1% Speed Accuracy Bi-Directional 16 Line User Slip Ring (See Options)
MDrive Plus Stepper motors with integrated electronics. MDrive 17 Plus Motion Control fully programmable
 Stepper motors with integrated electronics MDrive 17 Plus Description Presentation The is a 1.8 2-phase stepper motor with on-board fully programmable motion controller, drive electronics and optional
Stepper motors with integrated electronics MDrive 17 Plus Description Presentation The is a 1.8 2-phase stepper motor with on-board fully programmable motion controller, drive electronics and optional
Features and Benefits
 ..........................................................................3-15 Features and Benefits..............................................................................3 LTS Technical Specifications.........................................................................4
..........................................................................3-15 Features and Benefits..............................................................................3 LTS Technical Specifications.........................................................................4
862 PROLASER CROSS LINE LASER
 L A S E R S 862 PROLASER CROSS LINE LASER Indoor red cross-line laser Magnet Hanging hole Velcro strip V-Groove Magnet Battery cover opening Tripod thread 1/4" 4.5cm (1.77") On/Off switch 10.5cm (4.15")
L A S E R S 862 PROLASER CROSS LINE LASER Indoor red cross-line laser Magnet Hanging hole Velcro strip V-Groove Magnet Battery cover opening Tripod thread 1/4" 4.5cm (1.77") On/Off switch 10.5cm (4.15")
ACSI ACTUATOR CONTROL SOLUTIONS
 ACSI ACTUATOR CONTROL SOLUTIONS INTEGRATED SERVO MOTOR / DRIVE / CONTROLLER LINEAR SOLUTIONS MADE EASY ACSI Motor/Drive/Controller WHAT IS THE ACSI? The ACSI is an extremely easy-to-use integrated servo
ACSI ACTUATOR CONTROL SOLUTIONS INTEGRATED SERVO MOTOR / DRIVE / CONTROLLER LINEAR SOLUTIONS MADE EASY ACSI Motor/Drive/Controller WHAT IS THE ACSI? The ACSI is an extremely easy-to-use integrated servo
MDrive Plus Stepper motors with integrated electronics. MDrive 14 Plus Motion Control fully programmable
 MDrive Plus Stepper motors with integrated electronics MDrive 14 Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
MDrive Plus Stepper motors with integrated electronics MDrive 14 Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
Courtesy of CMA/Flodyne/Hydradyne Motion Control Hydraulic Pneumatic Electrical Mechanical (800)
") Servo Drives The wide product range of LinMot servo drives allows the rapid implementation in applications from simple two position point to point movements up to complex, high-precision multi-axis synchronization
Servo Drives The wide product range of LinMot servo drives allows the rapid implementation in applications from simple two position point to point movements up to complex, high-precision multi-axis synchronization
Lexium MDrive. LMD P57 Pulse / direction input REACH IP65. Product overview. General features. Intelligent motion systems
 LMD P57 Pulse / direction input REACH IP65 Product overview Robust Pulse /Direction products integrate 1.8 2-phase stepper motors with onboard control electronics and hmt closed loop performance. Products
LMD P57 Pulse / direction input REACH IP65 Product overview Robust Pulse /Direction products integrate 1.8 2-phase stepper motors with onboard control electronics and hmt closed loop performance. Products
A U T O C O L L I M A T O R S
 Printed in Germany 229 900 E 04/07 E l e c t r o n i c α A U T O C O L L I M A T O R S Measure With Precision MÖLLER-WEDEL OPTICAL GmbH Rosengarten 10 D-22880 Wedel Tel : +49-41 03-9 37 76 10 Fax: +49-41
Printed in Germany 229 900 E 04/07 E l e c t r o n i c α A U T O C O L L I M A T O R S Measure With Precision MÖLLER-WEDEL OPTICAL GmbH Rosengarten 10 D-22880 Wedel Tel : +49-41 03-9 37 76 10 Fax: +49-41
How to Specify & Size Electromechanical Linear Actuators
 How to Specify & Size Electromechanical Linear Actuators Presented at IMTS 2014 Motion, Drive and Automation Conference By Robert E. Ward, Jr. When you move, we move. About half of all of our projects
How to Specify & Size Electromechanical Linear Actuators Presented at IMTS 2014 Motion, Drive and Automation Conference By Robert E. Ward, Jr. When you move, we move. About half of all of our projects
MDrive Plus Stepper motors with integrated electronics. MDrive 34ac Plus Motion Control fully programmable
 MDrive Plus Stepper motors with integrated electronics MDrive 34ac Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
MDrive Plus Stepper motors with integrated electronics MDrive 34ac Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
Opto-mechanical review of a light weight compact visible zoom camera
 Opto-mechanical review of a light weight compact visible zoom camera Brian McMaster Corning Tropel, 60 O Connor Road, Fairport, NY, USA, 14450 ABSTRACT An overview of a high performance zoom camera will
Opto-mechanical review of a light weight compact visible zoom camera Brian McMaster Corning Tropel, 60 O Connor Road, Fairport, NY, USA, 14450 ABSTRACT An overview of a high performance zoom camera will
The information in this chapter will enable you to:
 C H A P T E R ➅ Hardware Reference The information in this chapter will enable you to: Environmental Specifications Use this chapter as a quick reference tool for most system specifications Use this chapter
C H A P T E R ➅ Hardware Reference The information in this chapter will enable you to: Environmental Specifications Use this chapter as a quick reference tool for most system specifications Use this chapter
Rretrofitting process optimization in CNC machines using PLC and labview
 Rretrofitting process optimization in CNC machines using PLC and labview 1 Balaji A, 2 Jahir Hussain H, 3 Faheem Ashkar M R 1 Assistant Professor, 2 UG Scholar, 3 UG Scholar 1 Department of Mechatronics
Rretrofitting process optimization in CNC machines using PLC and labview 1 Balaji A, 2 Jahir Hussain H, 3 Faheem Ashkar M R 1 Assistant Professor, 2 UG Scholar, 3 UG Scholar 1 Department of Mechatronics
ED-21 Analog Output Series Magnetic Encoder
 Analog voltage or current output Low profile IP52 sealing Ball bearing Custom housings, shafts, connectors available, in most cases with no additional tooling required DESCRIPTION The ED-21 series magnetic
Analog voltage or current output Low profile IP52 sealing Ball bearing Custom housings, shafts, connectors available, in most cases with no additional tooling required DESCRIPTION The ED-21 series magnetic
DIGITAL COMPASS SOLUTION
 Features 5 Heading Accuracy, 0.5 Resolution 2-axis Capability Small Size (19mm x 19mm x 4.5mm), Light Weight Advanced Hard Iron Calibration Routine for Stray Fields and Ferrous Objects 0 to 70 C Operating
Features 5 Heading Accuracy, 0.5 Resolution 2-axis Capability Small Size (19mm x 19mm x 4.5mm), Light Weight Advanced Hard Iron Calibration Routine for Stray Fields and Ferrous Objects 0 to 70 C Operating
M-116 Precision Rotary Stage
 MP 54E User Manual M-116 Precision Rotary Stage Release: 1.2.2 Date: 2005-09-19 This document describes the following product(s): M-116.DG Rotary Stage, DC-Motor with Gearhead and Encoder M-116.DGH Rotary
MP 54E User Manual M-116 Precision Rotary Stage Release: 1.2.2 Date: 2005-09-19 This document describes the following product(s): M-116.DG Rotary Stage, DC-Motor with Gearhead and Encoder M-116.DGH Rotary
Camera gimbal control system for unmanned platforms
 8 th International Symposium Topical Problems in the Field of Electrical and Power Engineering Pärnu, Estonia, January 11-16, 2010 Camera gimbal control system for unmanned platforms Kristjan Tiimus, Mart
8 th International Symposium Topical Problems in the Field of Electrical and Power Engineering Pärnu, Estonia, January 11-16, 2010 Camera gimbal control system for unmanned platforms Kristjan Tiimus, Mart
MDrive Linear Actuator
 MDrive Linear Actuator Compact, integrated all-in-one linear motion systems Hybrid Linear Actuator, Description MDrive Hybrid Linear Actuator MDrive Hybrid Linear Actuator,, non-captive and external shaft
MDrive Linear Actuator Compact, integrated all-in-one linear motion systems Hybrid Linear Actuator, Description MDrive Hybrid Linear Actuator MDrive Hybrid Linear Actuator,, non-captive and external shaft
PKS - PRO - E A - J P 2 2
 PKS-PRO-E-04 - Servo System Input Range of 85-253 VAC of 180 oz-in 400 Watt Power Rating No Load Speed of up to 4,500 RPM 2,500 PPR Incremental Encoder Enclosed and Self-Cooled Oil Seal and Optional Brake
PKS-PRO-E-04 - Servo System Input Range of 85-253 VAC of 180 oz-in 400 Watt Power Rating No Load Speed of up to 4,500 RPM 2,500 PPR Incremental Encoder Enclosed and Self-Cooled Oil Seal and Optional Brake
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
A2K. Absolute Optical Encoder: Kit Version Page 1 of 7. Description. Features
 Description Page 1 of 7 The A2K optical encoder is a 12 bit absolute rotary kit style encoder which reports a shaft angle within a single 360 degree rotation of a shaft. The kit style A2K allows the encoder
Description Page 1 of 7 The A2K optical encoder is a 12 bit absolute rotary kit style encoder which reports a shaft angle within a single 360 degree rotation of a shaft. The kit style A2K allows the encoder
MDrive Linear Actuator
 MDrive Linear Actuator Product overview MDrive Linear Actuators are compact linear motion systems. External or non-captive shaft linear mechanicals are integrated with stepper motor and electronics for
MDrive Linear Actuator Product overview MDrive Linear Actuators are compact linear motion systems. External or non-captive shaft linear mechanicals are integrated with stepper motor and electronics for
Single-Axis Lasers for Flatness and Leveling Applications. Laser Systems for Flatness and Leveling L-730/L-740 Series
 Single-Axis Lasers for Flatness and Leveling Applications Laser Systems for Flatness and Leveling L-730/L-740 Series Why the L-730/L-740 Flatness Leveling Systems are Better Sooner or later everything
Single-Axis Lasers for Flatness and Leveling Applications Laser Systems for Flatness and Leveling L-730/L-740 Series Why the L-730/L-740 Flatness Leveling Systems are Better Sooner or later everything
Incremental Encoder with Hollow Shaft
 Incremental Encoder Type RI 36-H n miniature industry encoder for high number of pulses n short mounting length n easy mounting procedure n Application e.g.: - Motors - Machine tools - Packaging Machines
Incremental Encoder Type RI 36-H n miniature industry encoder for high number of pulses n short mounting length n easy mounting procedure n Application e.g.: - Motors - Machine tools - Packaging Machines
Allegra Series Reference Manual. Programmable Motion Control System
 Allegra Series Reference Manual Programmable Motion Control System The Allegra series of motion controllers are stand-alone or host controlled, easy-to-use, plug-and-play and cost effective solutions for
Allegra Series Reference Manual Programmable Motion Control System The Allegra series of motion controllers are stand-alone or host controlled, easy-to-use, plug-and-play and cost effective solutions for
MDrive Linear Actuator
 MDrive Linear Actuator Compact, integrated all-in-one linear motion systems MDrive 14 Plus Linear Actuator, Description MDrive Plus Linear Actuator Presentation The MDrive Plus Linear Actuator is an integrated
MDrive Linear Actuator Compact, integrated all-in-one linear motion systems MDrive 14 Plus Linear Actuator, Description MDrive Plus Linear Actuator Presentation The MDrive Plus Linear Actuator is an integrated
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
Members: Sponsor: Dalton Hamilton Preston-Eastin Levi Edens Kenneth Mui Brice Abbott
 Members: Dalton Hamilton Levi Edens Brice Abbott Sponsor: Preston-Eastin Kenneth Mui Mission Statement Wolf Pack Engineering strives to provide our customer with innovative solutions. We take a cost effective
Members: Dalton Hamilton Levi Edens Brice Abbott Sponsor: Preston-Eastin Kenneth Mui Mission Statement Wolf Pack Engineering strives to provide our customer with innovative solutions. We take a cost effective
ACSI ACTUATOR CONTROL SOLUTIONS
 ACSI ACTUATOR CONTROL SOLUTIONS INTEGRATED SERVO MOTOR / DRIVE / CONTROLLER LINEAR SOLUTIONS MADE EASY ACSI Motor/Drive/Controller WHAT IS THE ACSI? The ACSI is an extremely easy-to-use integrated servo
ACSI ACTUATOR CONTROL SOLUTIONS INTEGRATED SERVO MOTOR / DRIVE / CONTROLLER LINEAR SOLUTIONS MADE EASY ACSI Motor/Drive/Controller WHAT IS THE ACSI? The ACSI is an extremely easy-to-use integrated servo
MDrive Plus Stepper motors with integrated electronics. MDrive 34 Plus Motion Control fully programmable
 MDrive Plus Stepper motors with integrated electronics MDrive 34 Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
MDrive Plus Stepper motors with integrated electronics MDrive 34 Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
Chapter 1 Introduction to Numerically Controlled Machines
 Chapter 1 Introduction to Numerically Controlled Machines The primary building blocks of flexible manufacturing and computer integrated manufacturing systems are numerically controlled (CNC) machine tools.
Chapter 1 Introduction to Numerically Controlled Machines The primary building blocks of flexible manufacturing and computer integrated manufacturing systems are numerically controlled (CNC) machine tools.
CAUTION. isavi User Guide. Hot Surface Do Not Touch. Allow to cool before handling
 CAUTION Hot Surface Do Not Touch Allow to cool before handling isavi User Guide 1 2 3 isavi User Guide 4 isavi User Guide 5 6 7 8 Caution Hot surface isavi User Guide 9 10 11 12 13 14 15 16 17 18 19 20
CAUTION Hot Surface Do Not Touch Allow to cool before handling isavi User Guide 1 2 3 isavi User Guide 4 isavi User Guide 5 6 7 8 Caution Hot surface isavi User Guide 9 10 11 12 13 14 15 16 17 18 19 20
Responsive Flight Software Development & Verification Techniques for Small Satellites
 Responsive Flight Software Development & Verification Techniques for Small Satellites Darren Rowen The Aerospace Corporation Vehicle Systems Division 9 November 2012 The Aerospace Corporation 2012 Overview
Responsive Flight Software Development & Verification Techniques for Small Satellites Darren Rowen The Aerospace Corporation Vehicle Systems Division 9 November 2012 The Aerospace Corporation 2012 Overview