Image warping Li Zhang CS559
|
|
|
- Todd Ward
- 5 years ago
- Views:
Transcription

 If our samples are D apar, e can rie his as: f[i,j] Quanize{ f(i D, j D) The image can no be")
![represened as a mari of ineger values Image arping hange piels locaions o creae a ne image: f() g(h()) h([,])[,/2] f h g 62 79 23 9 2 5 4 9 62 2 78 34 58 97](/docs-images/89/98843391/images/1-2.jpg "46 46 48 76 35 5 88 9 68 49 2 29 26 37 77 89 44 47 87 2 62 28 255 252 66 23 62 3 66 63 27 7 99 3 arameric (global) arping Nonparameric (local) arping Eamples")
1 Wha is an image Image arping Li Zhang S559 We can hink of an image as a funcion, f: R 2 R: f(, ) gives he inensi a posiion (, ) defined over a recangle, ih a finie range: f: [a,b][c,d] [,] f Slides solen from rof Yungu huang hp://.csie.nu.edu./~c/courses/vf/7spring/overvie/ color image r(, ) f (, ) g (, ) b(, ) digial image We usuall operae on digial (discree) images: Sample he 2D space on a regular grid Quanize each sample (round o neares ineger) If our samples are D apar, e can rie his as: f[i,j] Quanize{ f(i D, j D) The image can no be represened as a mari of ineger values Image arping hange piels locaions o creae a ne image: f() g(h()) h([,])[,/2] f h g arameric (global) arping Nonparameric (local) arping Eamples of parameric arps: ranslaion roaion aspec affine perspecive clindrical Original Warped
2 arameric (global) arping T p (,) p (, ) Transformaion T is a coordinae-changing machine: p T(p) Wha does i mean ha T is global? can be described b jus a fe numbers (parameers) he parameers are he same for an poin p Represen T as a mari: p Mp M Scaling Scaling a coordinae means mulipling each of is componens b a scalar Uniform scaling means his scalar is he same for all componens: f g Scaling Non-uniform scaling: differen scalars per componen: f g 2.5 Scaling Scaling operaion: a b Or, in mari form: a b 2,.5 Wha s inverse of S? scaling mari S 2-D Roaion (, ) (, ) cos() - sin() sin() cos() 2-D Roaion This is eas o capure in mari form: cos sin ( ) sin( ) ( ) cos( ) R Even hough sin() and cos() are nonlinear o, is a linear combinaion of and is a linear combinaion of and Wha is he inverse ransformaion? Roaion b For roaion marices, de(r) so T R R 2
3 3 22 Marices Wha pes of ransformaions can be represened ih a 22 mari? 2D Ideni? 2D Scale around (,)? s s s s 22 Marices Wha pes of ransformaions can be represened ih a 22 mari? 2D Roae around (,)? cos sin sin cos cos sin sin cos 2D Shear? sh sh sh sh 22 Marices Wha pes of ransformaions can be represened ih a 22 mari? 2D Mirror abou Y ais? 2D Mirror over (,)? ll 2D Linear Transformaions Linear ransformaions are combinaions of Scale, Roaion, Shear, and Mirror roperies of linear ransformaions: Origin maps o origin Lines map o lines arallel lines remain parallel Raios are preserved losed under composiion d c b a 22 Marices Wha pes of ransformaions can no be represened ih a 22 mari? 2D Translaion? Onl linear 2D ransformaions can be represened ih a 22 mari NO! Translaion Eample of ranslaion 2 Homogeneous oordinaes
4 ffine Transformaions ffine ransformaions are combinaions of Linear ransformaions, and Translaions roperies of affine ransformaions: Origin does no necessaril map o origin Lines map o lines arallel lines remain parallel a b c Raios are preserved d e f losed under composiion Models change of basis rojecive Transformaions rojecive ransformaions ffine ransformaions, and rojecive arps roperies of projecive ransformaions: Origin does no necessaril map o origin Lines map o lines arallel lines do no necessaril remain parallel Raios are no preserved a b losed under composiion Models change of basis d e g h Ver Useful In Teure Mapping! / / c f i Image arping Given a coordinae ransform T() and a source image I(), ho do e compue a ransformed image I ( ) I(T())? Forard arping Send each piel I() o is corresponding locaion T() in I ( ) T() T() I() I ( ) I() I ( ) Forard arping farp(i, I, T) { for (; <I.heigh; ) for (; <I.idh; ) { (, )T(,); I (, )I(,); I I T Forard arping Send each piel I() o is corresponding locaion T() in I ( ) Wha if piel lands beeen o piels? Will be here holes? nser: add conribuion o several piels, normalize laer (splaing) h() f() g( ) 4
 { (, )T(,); Splaing(I,,,I(,),kernel); I I T Inverse arping Ge each piel I ( ) from is corresponding locaion T - ( ) in I() T - ( ) I() I ( ) Inverse arping iarp(i, I, T) { for (; <I.")
5 Forard arping farp(i, I, T) { for (; <I.heigh; ) for (; <I.idh; ) { (, )T(,); Splaing(I,,,I(,),kernel); I I T Inverse arping Ge each piel I ( ) from is corresponding locaion T - ( ) in I() T - ( ) I() I ( ) Inverse arping iarp(i, I, T) { for (; <I.heigh; ) for (; <I.idh; ) { (,)T - (, ); I (, )I(,); I T - I Inverse arping Ge each piel I ( ) from is corresponding locaion T - ( ) in I() Wha if piel comes from beeen o piels? nser: resample color value from inerpolaed (prefilered) source image f() g( ) Inverse arping iarp(i, I, T) { for (; <I.heigh; ) for (; <I.idh; ) { (,)T - (, ); I (, )Reconsruc(I,,,kernel); I T - I Sampling band limied 5

 f ( qi ) f ( p) k( q i i ) color; eighs; p idh for all q s dis < idh d dis(p, q); d kernel(d);")
 ossible reconsrucion filers (kernels): neares neighbor bilinear bicubic sinc")
6 Reconsrucion Reconsrucion Reconsrucion generaes an approimaion o he original funcion. Error is called aliasing. sampling sample value reconsrucion The reconsruced funcion is obained b inerpolaing among he samples in some manner sample posiion Reconsrucion ompued eighed sum of piel neighborhood; oupu is eighed average of inpu, here eighs are normalized values of filer kernel k k( q i i ) f ( qi ) f ( p) k( q i i ) color; eighs; p idh for all q s dis < idh d dis(p, q); d kernel(d); color q.color; q eighs ; p.olor color/eighs; Reconsrucion (inerpolaion) ossible reconsrucion filers (kernels): neares neighbor bilinear bicubic sinc (opimal reconsrucion) ilinear inerpolaion (riangle filer) simple mehod for resampling images Non-parameric image arping 6

 ( r e r β ρ ) log( ) ( 2 r r r ρ")
7 7 Non-parameric image arping Specif a more deailed arp funcion Splines, meshes, opical flo (per-piel moion) Non-parameric image arping Mappings implied b correspondences Inverse arping? Non-parameric image arping arcenric coordinae arcenric coordinaes Non-parameric image arping arcenric coordinae Non-parameric image arping radial basis funcion 2 ) ( r e r β ρ ) log( ) ( 2 r r r ρ Gaussian hin plae spline Δ Δ i X X i k K i ) (
8 Demo hp://.colonize.com/arp/arp4-2.php Warping is a useful operaion for mosaics, video maching, vie inerpolaion and so on. Image morphing Image morphing The goal is o snhesize a fluid ransformaion from one image o anoher. ross dissolving is a common ransiion beeen cus, bu i is no good for morphing because of he ghosing effecs. Image morphing Wh ghosing? Morphing arping cross-dissolving shape (geomeric) color (phoomeric) image # dissolving image #2 Image morphing Morphing sequence image # cross-dissolving image #2 arp morphing arp 8



 Ho can e specif he arp?")
9 Muli-source morphing Muli-source morphing Face averaging b morphing The average face hp://.uniregensburg.de/fakulaeen/phil_fak_ii/schol ogie/s_ii/beaucheck/english/inde.hm average faces Image morphing creae a morphing sequence: for each ime. reae an inermediae arping field (b inerpolaion) 2. Warp boh images oards i 3. ross-dissolve he colors in he nel arped images Warp specificaion (mesh arping) Ho can e specif he arp?. Specif corresponding spline conrol poins inerpolae o a complee arping funcion.33 eas o implemen, bu ma no be epressive enough 9



 Ho can e")

 For each X in he")

10 Warp specificaion Ho can e specif he arp 2. Specif corresponding poins inerpolae o a complee arping funcion Soluion: conver o mesh arping. Define a riangular mesh over he poins Same mesh in boh images! No e have riangle-o-riangle correspondences 2. Warp each riangle separael from source o desinaion Ho do e arp a riangle? 3 poins affine arp! Jus like eure mapping Warp specificaion (field arping) Ho can e specif he arp? 3. Specif corresponding vecors inerpolae o a complee arping funcion The eier & Neel lgorihm eier&neel (SIGGRH 992) Single line-pair Q o Q : lgorihm (single line-pair) For each X in he desinaion image:. Find he corresponding u,v 2. Find X in he source image for ha u,v 3. desinaionimage(x) sourceimage(x ) Eamples: Muliple Lines D X X i i i ffine ransformaion lengh lengh of he line segmen, dis disance o line segmen The influence of a, p, b. The same as he average of X i




11 Full lgorihm Resuling arp omparison o mesh morphing ros: more epressive ons: speed and conrol Warp inerpolaion Ho do e creae an inermediae arp a ime? linear inerpolaion for line end-poins u, a line roaing 8 degrees ill become lengh in he middle One soluion is o inerpolae line mid-poin and orienaion angle nimaion nimaed sequences Specif keframes and inerpolae he lines for he inbeeen frames Require a lo of eaking





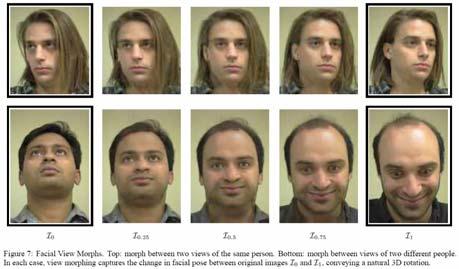
12 Resuls roblem ih morphing So far, e have performed linear inerpolaion of feaure poin posiions u ha happens if e r o morph beeen o vies of he same objec? Michael Jackson s MTV lack or Whie hp://.michaeljackson.com/quickime_blackorhie.hml Vie morphing Seiz & Der hp://.cs.ashingon.edu/homes/seiz/vmorph/vmorph.hm Inerpolaion consisen ih 3D vie inerpolaion Main rick rearp ih a homograph o "prealign" images So ha he o vies are parallel ecause linear inerpolaion orks hen vies are parallel morph morph prearp prearp homographies inpu oupu inpu 2

13 3
Image warping/morphing
 Image arping/morphing Image arping Digial Visual Effecs Yung-Yu Chuang ih slides b Richard Szeliski, Seve Seiz, Tom Funkhouser and leei Efros Image formaion Sampling and quanizaion B Wha is an image We
Image arping/morphing Image arping Digial Visual Effecs Yung-Yu Chuang ih slides b Richard Szeliski, Seve Seiz, Tom Funkhouser and leei Efros Image formaion Sampling and quanizaion B Wha is an image We
M y. Image Warping. Targil 7 : Image Warping. Image Warping. 2D Geometric Transformations. image filtering: change range of image g(x) = T(f(x))
 = T(f(x))") Hebrew Universi Image Processing - 6 Image Warping Hebrew Universi Image Processing - 6 argil 7 : Image Warping D Geomeric ransormaions hp://www.jere-marin.com Man slides rom Seve Seiz and Aleei Eros Image
Hebrew Universi Image Processing - 6 Image Warping Hebrew Universi Image Processing - 6 argil 7 : Image Warping D Geomeric ransormaions hp://www.jere-marin.com Man slides rom Seve Seiz and Aleei Eros Image
CENG 477 Introduction to Computer Graphics. Modeling Transformations
 CENG 477 Inroducion o Compuer Graphics Modeling Transformaions Modeling Transformaions Model coordinaes o World coordinaes: Model coordinaes: All shapes wih heir local coordinaes and sies. world World
CENG 477 Inroducion o Compuer Graphics Modeling Transformaions Modeling Transformaions Model coordinaes o World coordinaes: Model coordinaes: All shapes wih heir local coordinaes and sies. world World
Image warping/morphing
 Image warping/morphing Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/20 with slides b Richard Szeliski, Steve Seitz, Tom Funkhouser and Aleei Efros Image warping Image formation B A Sampling
Image warping/morphing Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/20 with slides b Richard Szeliski, Steve Seitz, Tom Funkhouser and Aleei Efros Image warping Image formation B A Sampling
Image warping. image filtering: change range of image. image warping: change domain of image g(x) = f(h(x)) h(y)=0.5y+0.5. h([x,y])=[x,y/2] f h
![Image warping. image filtering: change range of image. image warping: change domain of image g(x) = f(h(x)) h(y)=0.5y+0.5. h([x,y])=[x,y/2] f h](/thumbs/71/65976347.jpg "Image warping. image filtering: change range of image. image warping: change domain of image g(x) = f(h(x)) h(y)=0.5y+0.5. h([x,y])=[x,y/2] f h") Image warping Image warping image filtering: change range of image g() () = h(f()) h(f()) f h g h()=0.5+0.5 image warping: change domain of image g() = f(h()) f h g h([,])=[,/2] Parametric (global) warping
Image warping Image warping image filtering: change range of image g() () = h(f()) h(f()) f h g h()=0.5+0.5 image warping: change domain of image g() = f(h()) f h g h([,])=[,/2] Parametric (global) warping
4.1 3D GEOMETRIC TRANSFORMATIONS
 MODULE IV MCA - 3 COMPUTER GRAPHICS ADMN 29- Dep. of Compuer Science And Applicaions, SJCET, Palai 94 4. 3D GEOMETRIC TRANSFORMATIONS Mehods for geomeric ransformaions and objec modeling in hree dimensions
MODULE IV MCA - 3 COMPUTER GRAPHICS ADMN 29- Dep. of Compuer Science And Applicaions, SJCET, Palai 94 4. 3D GEOMETRIC TRANSFORMATIONS Mehods for geomeric ransformaions and objec modeling in hree dimensions
Geometry Transformation
 Geomer Transformaion Januar 26 Prof. Gar Wang Dep. of Mechanical and Manufacuring Engineering Universi of Manioba Wh geomer ransformaion? Beer undersanding of he design Communicaion wih cusomers Generaing
Geomer Transformaion Januar 26 Prof. Gar Wang Dep. of Mechanical and Manufacuring Engineering Universi of Manioba Wh geomer ransformaion? Beer undersanding of he design Communicaion wih cusomers Generaing
Prof. Feng Liu. Winter /05/2019
 Prof. Feng Liu Winter 2019 http://www.cs.pd.edu/~fliu/courses/cs410/ 02/05/2019 Last Time Image alignment 2 Toda Image warping The slides for this topic are used from Prof. Yung-Yu Chuang, which use materials
Prof. Feng Liu Winter 2019 http://www.cs.pd.edu/~fliu/courses/cs410/ 02/05/2019 Last Time Image alignment 2 Toda Image warping The slides for this topic are used from Prof. Yung-Yu Chuang, which use materials
Interactive Computer Graphics. Warping and morphing. Warping and Morphing. Warping and Morphing. Lecture 14+15: Warping and Morphing. What is.
 Interactive Computer Graphics Warping and morphing Lecture 14+15: Warping and Morphing Lecture 14: Warping and Morphing: Slide 1 Lecture 14: Warping and Morphing: Slide 2 Warping and Morphing What is Warping
Interactive Computer Graphics Warping and morphing Lecture 14+15: Warping and Morphing Lecture 14: Warping and Morphing: Slide 1 Lecture 14: Warping and Morphing: Slide 2 Warping and Morphing What is Warping
Image Warping CSE399b, Spring 07 Computer Vision
 Image Warping CSE399b, Spring 7 Computer Vision http://maps.a9.com http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.html http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.html Autostiching on A9.com
Image Warping CSE399b, Spring 7 Computer Vision http://maps.a9.com http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.html http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.html Autostiching on A9.com
Image warping/morphing
 Image warping/morphing Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Tom Funkhouser and Alexei Efros Image warping Image formation B A Sampling and quantization What
Image warping/morphing Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Tom Funkhouser and Alexei Efros Image warping Image formation B A Sampling and quantization What
EECS 487: Interactive Computer Graphics
 EECS 487: Ineracive Compuer Graphics Lecure 7: B-splines curves Raional Bézier and NURBS Cubic Splines A represenaion of cubic spline consiss of: four conrol poins (why four?) hese are compleely user specified
EECS 487: Ineracive Compuer Graphics Lecure 7: B-splines curves Raional Bézier and NURBS Cubic Splines A represenaion of cubic spline consiss of: four conrol poins (why four?) hese are compleely user specified
STEREO PLANE MATCHING TECHNIQUE
 STEREO PLANE MATCHING TECHNIQUE Commission III KEY WORDS: Sereo Maching, Surface Modeling, Projecive Transformaion, Homography ABSTRACT: This paper presens a new ype of sereo maching algorihm called Sereo
STEREO PLANE MATCHING TECHNIQUE Commission III KEY WORDS: Sereo Maching, Surface Modeling, Projecive Transformaion, Homography ABSTRACT: This paper presens a new ype of sereo maching algorihm called Sereo
Projective geometry- 2D
 Projecive geomer- D Acknowledgemens Marc Pollefes: for allowing e use of is ecellen slides on is opic p://www.cs.unc.edu/~marc/mvg/ Ricard Harle and Andrew Zisserman, "Muliple View Geomer in Compuer Vision"
Projecive geomer- D Acknowledgemens Marc Pollefes: for allowing e use of is ecellen slides on is opic p://www.cs.unc.edu/~marc/mvg/ Ricard Harle and Andrew Zisserman, "Muliple View Geomer in Compuer Vision"
Last Lecture. Edge Detection. Filtering Pyramid
 Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam T. Roweis and William T.
Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam T. Roweis and William T.
Systems & Biomedical Engineering Department. Transformation
 Sem & Biomedical Engineering Deparmen SBE 36B: Compuer Sem III Compuer Graphic Tranformaion Dr. Aman Eldeib Spring 28 Tranformaion Tranformaion i a fundamenal corner one of compuer graphic and i a cenral
Sem & Biomedical Engineering Deparmen SBE 36B: Compuer Sem III Compuer Graphic Tranformaion Dr. Aman Eldeib Spring 28 Tranformaion Tranformaion i a fundamenal corner one of compuer graphic and i a cenral
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 8: Geometric transformations Szeliski: Chapter 3.6 Reading Announcements Project 2 out today, due Oct. 4 (demo at end of class today) Image alignment Why don
CS467: Computer Vision Noah Snavely Lecture 8: Geometric transformations Szeliski: Chapter 3.6 Reading Announcements Project 2 out today, due Oct. 4 (demo at end of class today) Image alignment Why don
Image Warping. Some slides from Steve Seitz
 Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Spring 2 Image Transformations image filtering: change range of image g() = T(f())
Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Spring 2 Image Transformations image filtering: change range of image g() = T(f())
Projection & Interaction
 Projecion & Ineracion Algebra of projecion Canonical viewing volume rackball inerface ransform Hierarchies Preview of Assignmen #2 Lecure 8 Comp 236 Spring 25 Projecions Our lives are grealy simplified
Projecion & Ineracion Algebra of projecion Canonical viewing volume rackball inerface ransform Hierarchies Preview of Assignmen #2 Lecure 8 Comp 236 Spring 25 Projecions Our lives are grealy simplified
Interactive Graphical Systems HT2005
 Ineracive Graphical Ssems HT25 Lesson 2 : Graphics Primer Sefan Seipel Sefan Seipel, Deparmen of Informaion Technolog, Uppsala Universi Ke issues of his lecure Represenaions of 3D models Repeiion of basic
Ineracive Graphical Ssems HT25 Lesson 2 : Graphics Primer Sefan Seipel Sefan Seipel, Deparmen of Informaion Technolog, Uppsala Universi Ke issues of his lecure Represenaions of 3D models Repeiion of basic
Warping, Morphing and Mosaics
 Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
IMAGE SAMPLING AND IMAGE QUANTIZATION
 Digial image processing IMAGE SAMPLING AND IMAGE QUANTIZATION. Inrodcion. Sampling in he wo-dimensional space Basics on image sampling The concep of spaial freqencies Images of limied bandwidh Two-dimensional
Digial image processing IMAGE SAMPLING AND IMAGE QUANTIZATION. Inrodcion. Sampling in he wo-dimensional space Basics on image sampling The concep of spaial freqencies Images of limied bandwidh Two-dimensional
Image Warping : Computational Photography Alexei Efros, CMU, Fall Some slides from Steve Seitz
 Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 2 Image Transformations image filtering: change range of image g() T(f())
Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 2 Image Transformations image filtering: change range of image g() T(f())
Image Warping. Some slides from Steve Seitz
 Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 26 Image Warping image filtering: change range of image g() T(f()) f T f image
Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 26 Image Warping image filtering: change range of image g() T(f()) f T f image
CAMERA CALIBRATION BY REGISTRATION STEREO RECONSTRUCTION TO 3D MODEL
 CAMERA CALIBRATION BY REGISTRATION STEREO RECONSTRUCTION TO 3D MODEL Klečka Jan Docoral Degree Programme (1), FEEC BUT E-mail: xkleck01@sud.feec.vubr.cz Supervised by: Horák Karel E-mail: horak@feec.vubr.cz
CAMERA CALIBRATION BY REGISTRATION STEREO RECONSTRUCTION TO 3D MODEL Klečka Jan Docoral Degree Programme (1), FEEC BUT E-mail: xkleck01@sud.feec.vubr.cz Supervised by: Horák Karel E-mail: horak@feec.vubr.cz
geometric transformations
 geomeric ranformaion comuer grahic ranform 28 fabio ellacini linear algebra review marice noaion baic oeraion mari-vecor mulilicaion comuer grahic ranform 28 fabio ellacini 2 marice noaion for marice and
geomeric ranformaion comuer grahic ranform 28 fabio ellacini linear algebra review marice noaion baic oeraion mari-vecor mulilicaion comuer grahic ranform 28 fabio ellacini 2 marice noaion for marice and
4. Minimax and planning problems
 CS/ECE/ISyE 524 Inroducion o Opimizaion Spring 2017 18 4. Minima and planning problems ˆ Opimizing piecewise linear funcions ˆ Minima problems ˆ Eample: Chebyshev cener ˆ Muli-period planning problems
CS/ECE/ISyE 524 Inroducion o Opimizaion Spring 2017 18 4. Minima and planning problems ˆ Opimizing piecewise linear funcions ˆ Minima problems ˆ Eample: Chebyshev cener ˆ Muli-period planning problems
Image Warping, mesh, and triangulation CSE399b, Spring 07 Computer Vision
 http://grail.cs.washington.edu/projects/rotoscoping/ Image Warping, mesh, and triangulation CSE399b, Spring 7 Computer Vision Man of the slides from A. Efros. Parametric (global) warping Eamples of parametric
http://grail.cs.washington.edu/projects/rotoscoping/ Image Warping, mesh, and triangulation CSE399b, Spring 7 Computer Vision Man of the slides from A. Efros. Parametric (global) warping Eamples of parametric
CS 428: Fall Introduction to. Geometric Transformations (continued) Andrew Nealen, Rutgers, /20/2010 1
 Andrew Nealen, Rutgers, /20/2010 1") CS 428: Fall 2 Inroducion o Compuer Graphic Geomeric Tranformaion (coninued) Andrew Nealen, Ruger, 2 9/2/2 Tranlaion Tranlaion are affine ranformaion The linear par i he ideni mari The 44 mari for he ranlaion
CS 428: Fall 2 Inroducion o Compuer Graphic Geomeric Tranformaion (coninued) Andrew Nealen, Ruger, 2 9/2/2 Tranlaion Tranlaion are affine ranformaion The linear par i he ideni mari The 44 mari for he ranlaion
How is project #1 going?
 How is project # going? Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam
How is project # going? Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam
Image Warping (Szeliski Sec 2.1.2)
") Image Warping (Szeliski Sec 2..2) http://www.jeffre-martin.com CS94: Image Manipulation & Computational Photograph Aleei Efros, UC Berkele, Fall 7 Some slides from Steve Seitz Image Transformations image
Image Warping (Szeliski Sec 2..2) http://www.jeffre-martin.com CS94: Image Manipulation & Computational Photograph Aleei Efros, UC Berkele, Fall 7 Some slides from Steve Seitz Image Transformations image
Targil 8 : Image warping. Forward warping. Motion Transformations and Image Warping (cont.) Automatic Image Alignment: Lucas Kanade (cont.
 Automatic Image Alignment: Lucas Kanade (cont.") Hebrew Uniersi mage Processing - 006 Hebrew Uniersi mage Processing - 006 Moion Transformaions and mage Warping - conine Targil 8 : Moion Transformaions and mage Warping con. Aomaic mage Alignmen: Lcas
Hebrew Uniersi mage Processing - 006 Hebrew Uniersi mage Processing - 006 Moion Transformaions and mage Warping - conine Targil 8 : Moion Transformaions and mage Warping con. Aomaic mage Alignmen: Lcas
AML710 CAD LECTURE 11 SPACE CURVES. Space Curves Intrinsic properties Synthetic curves
 AML7 CAD LECTURE Space Curves Inrinsic properies Synheic curves A curve which may pass hrough any region of hreedimensional space, as conrased o a plane curve which mus lie on a single plane. Space curves
AML7 CAD LECTURE Space Curves Inrinsic properies Synheic curves A curve which may pass hrough any region of hreedimensional space, as conrased o a plane curve which mus lie on a single plane. Space curves
Image Content Representation
 Image Conen Represenaion Represenaion for curves and shapes regions relaionships beween regions E.G.M. Perakis Image Represenaion & Recogniion 1 Reliable Represenaion Uniqueness: mus uniquely specify an
Image Conen Represenaion Represenaion for curves and shapes regions relaionships beween regions E.G.M. Perakis Image Represenaion & Recogniion 1 Reliable Represenaion Uniqueness: mus uniquely specify an
Spline Curves. Color Interpolation. Normal Interpolation. Last Time? Today. glshademodel (GL_SMOOTH); Adjacency Data Structures. Mesh Simplification
; Adjacency Data Structures. Mesh Simplification") Las Time? Adjacency Daa Srucures Spline Curves Geomeric & opologic informaion Dynamic allocaion Efficiency of access Mesh Simplificaion edge collapse/verex spli geomorphs progressive ransmission view-dependen
Las Time? Adjacency Daa Srucures Spline Curves Geomeric & opologic informaion Dynamic allocaion Efficiency of access Mesh Simplificaion edge collapse/verex spli geomorphs progressive ransmission view-dependen
Effects needed for Realism. Ray Tracing. Ray Tracing: History. Outline. Foundations of Computer Graphics (Fall 2012)
") Foundaions of ompuer Graphics (Fall 2012) S 184, Lecure 16: Ray Tracing hp://ins.eecs.berkeley.edu/~cs184 Effecs needed for Realism (Sof) Shadows Reflecions (Mirrors and Glossy) Transparency (Waer, Glass)
Foundaions of ompuer Graphics (Fall 2012) S 184, Lecure 16: Ray Tracing hp://ins.eecs.berkeley.edu/~cs184 Effecs needed for Realism (Sof) Shadows Reflecions (Mirrors and Glossy) Transparency (Waer, Glass)
FIELD PROGRAMMABLE GATE ARRAY (FPGA) AS A NEW APPROACH TO IMPLEMENT THE CHAOTIC GENERATORS
 AS A NEW APPROACH TO IMPLEMENT THE CHAOTIC GENERATORS") FIELD PROGRAMMABLE GATE ARRAY (FPGA) AS A NEW APPROACH TO IMPLEMENT THE CHAOTIC GENERATORS Mohammed A. Aseeri and M. I. Sobhy Deparmen of Elecronics, The Universiy of Ken a Canerbury Canerbury, Ken, CT2
FIELD PROGRAMMABLE GATE ARRAY (FPGA) AS A NEW APPROACH TO IMPLEMENT THE CHAOTIC GENERATORS Mohammed A. Aseeri and M. I. Sobhy Deparmen of Elecronics, The Universiy of Ken a Canerbury Canerbury, Ken, CT2
A Principled Approach to. MILP Modeling. Columbia University, August Carnegie Mellon University. Workshop on MIP. John Hooker.
 Slide A Principled Approach o MILP Modeling John Hooer Carnegie Mellon Universiy Worshop on MIP Columbia Universiy, Augus 008 Proposal MILP modeling is an ar, bu i need no be unprincipled. Slide Proposal
Slide A Principled Approach o MILP Modeling John Hooer Carnegie Mellon Universiy Worshop on MIP Columbia Universiy, Augus 008 Proposal MILP modeling is an ar, bu i need no be unprincipled. Slide Proposal
Gauss-Jordan Algorithm
 Gauss-Jordan Algorihm The Gauss-Jordan algorihm is a sep by sep procedure for solving a sysem of linear equaions which may conain any number of variables and any number of equaions. The algorihm is carried
Gauss-Jordan Algorihm The Gauss-Jordan algorihm is a sep by sep procedure for solving a sysem of linear equaions which may conain any number of variables and any number of equaions. The algorihm is carried
Warping. 12 May 2015
 Warping 12 May 2015 Warping, morphing, mosaic Slides from Durand and Freeman (MIT), Efros (CMU, Berkeley), Szeliski (MSR), Seitz (UW), Lowe (UBC) http://szeliski.org/book/ 2 Image Warping Image filtering:
Warping 12 May 2015 Warping, morphing, mosaic Slides from Durand and Freeman (MIT), Efros (CMU, Berkeley), Szeliski (MSR), Seitz (UW), Lowe (UBC) http://szeliski.org/book/ 2 Image Warping Image filtering:
Last Time: Curves & Surfaces. Today. Questions? Limitations of Polygonal Meshes. Can We Disguise the Facets?
 Las Time: Curves & Surfaces Expeced value and variance Mone-Carlo in graphics Imporance sampling Sraified sampling Pah Tracing Irradiance Cache Phoon Mapping Quesions? Today Moivaion Limiaions of Polygonal
Las Time: Curves & Surfaces Expeced value and variance Mone-Carlo in graphics Imporance sampling Sraified sampling Pah Tracing Irradiance Cache Phoon Mapping Quesions? Today Moivaion Limiaions of Polygonal
Schedule. Curves & Surfaces. Questions? Last Time: Today. Limitations of Polygonal Meshes. Acceleration Data Structures.
 Schedule Curves & Surfaces Sunday Ocober 5 h, * 3-5 PM *, Room TBA: Review Session for Quiz 1 Exra Office Hours on Monday (NE43 Graphics Lab) Tuesday Ocober 7 h : Quiz 1: In class 1 hand-wrien 8.5x11 shee
Schedule Curves & Surfaces Sunday Ocober 5 h, * 3-5 PM *, Room TBA: Review Session for Quiz 1 Exra Office Hours on Monday (NE43 Graphics Lab) Tuesday Ocober 7 h : Quiz 1: In class 1 hand-wrien 8.5x11 shee
Image Registration in Medical Imaging
 2/2/202 Image Regisraion in Medical Imaging BI260 VALERIE CARDENAS NICOLSON, PH.D ACKNOWLEDGEMENTS: COLIN STUDHOLME, PH.D. Medical Imaging Analysis Developing mahemaical algorihms o erac and relae informaion
2/2/202 Image Regisraion in Medical Imaging BI260 VALERIE CARDENAS NICOLSON, PH.D ACKNOWLEDGEMENTS: COLIN STUDHOLME, PH.D. Medical Imaging Analysis Developing mahemaical algorihms o erac and relae informaion
Image Warping. Many slides from Alyosha Efros + Steve Seitz. Photo by Sean Carroll
 Image Warping Man slides from Alosha Efros + Steve Seitz Photo b Sean Carroll Morphing Blend from one object to other with a series of local transformations Image Transformations image filtering: change
Image Warping Man slides from Alosha Efros + Steve Seitz Photo b Sean Carroll Morphing Blend from one object to other with a series of local transformations Image Transformations image filtering: change
Curves & Surfaces. Last Time? Today. Readings for Today (pick one) Limitations of Polygonal Meshes. Today. Adjacency Data Structures
 Limitations of Polygonal Meshes. Today. Adjacency Data Structures") Las Time? Adjacency Daa Srucures Geomeric & opologic informaion Dynamic allocaion Efficiency of access Curves & Surfaces Mesh Simplificaion edge collapse/verex spli geomorphs progressive ransmission view-dependen
Las Time? Adjacency Daa Srucures Geomeric & opologic informaion Dynamic allocaion Efficiency of access Curves & Surfaces Mesh Simplificaion edge collapse/verex spli geomorphs progressive ransmission view-dependen
Implementing Ray Casting in Tetrahedral Meshes with Programmable Graphics Hardware (Technical Report)
") Implemening Ray Casing in Terahedral Meshes wih Programmable Graphics Hardware (Technical Repor) Marin Kraus, Thomas Erl March 28, 2002 1 Inroducion Alhough cell-projecion, e.g., [3, 2], and resampling,
Implemening Ray Casing in Terahedral Meshes wih Programmable Graphics Hardware (Technical Repor) Marin Kraus, Thomas Erl March 28, 2002 1 Inroducion Alhough cell-projecion, e.g., [3, 2], and resampling,
Reconstruct scene geometry from two or more calibrated images. scene point. image plane. Reconstruct scene geometry from two or more calibrated images
 Sereo and Moion The Sereo Problem Reconsrc scene geomer from wo or more calibraed images scene poin focal poin image plane Sereo The Sereo Problem Reconsrc scene geomer from wo or more calibraed images
Sereo and Moion The Sereo Problem Reconsrc scene geomer from wo or more calibraed images scene poin focal poin image plane Sereo The Sereo Problem Reconsrc scene geomer from wo or more calibraed images
A Matching Algorithm for Content-Based Image Retrieval
 A Maching Algorihm for Conen-Based Image Rerieval Sue J. Cho Deparmen of Compuer Science Seoul Naional Universiy Seoul, Korea Absrac Conen-based image rerieval sysem rerieves an image from a daabase using
A Maching Algorihm for Conen-Based Image Rerieval Sue J. Cho Deparmen of Compuer Science Seoul Naional Universiy Seoul, Korea Absrac Conen-based image rerieval sysem rerieves an image from a daabase using
Today. Curves & Surfaces. Can We Disguise the Facets? Limitations of Polygonal Meshes. Better, but not always good enough
 Today Curves & Surfaces Moivaion Limiaions of Polygonal Models Some Modeling Tools & Definiions Curves Surfaces / Paches Subdivision Surfaces Limiaions of Polygonal Meshes Can We Disguise he Faces? Planar
Today Curves & Surfaces Moivaion Limiaions of Polygonal Models Some Modeling Tools & Definiions Curves Surfaces / Paches Subdivision Surfaces Limiaions of Polygonal Meshes Can We Disguise he Faces? Planar
FLOW VISUALIZATION USING MOVING TEXTURES * Nelson Max Lawrence Livermore National Laboratory Livermore, California
 FLOW VISUALIZATION USING MOVING TEXTURES * Nelson Max Lawrence Livermore Naional Laboraor Livermore, California Barr Becker Lawrence Livermore Naional Laboraor Livermore, California SUMMARY We presen a
FLOW VISUALIZATION USING MOVING TEXTURES * Nelson Max Lawrence Livermore Naional Laboraor Livermore, California Barr Becker Lawrence Livermore Naional Laboraor Livermore, California SUMMARY We presen a
Shortest Path Algorithms. Lecture I: Shortest Path Algorithms. Example. Graphs and Matrices. Setting: Dr Kieran T. Herley.
 Shores Pah Algorihms Background Seing: Lecure I: Shores Pah Algorihms Dr Kieran T. Herle Deparmen of Compuer Science Universi College Cork Ocober 201 direced graph, real edge weighs Le he lengh of a pah
Shores Pah Algorihms Background Seing: Lecure I: Shores Pah Algorihms Dr Kieran T. Herle Deparmen of Compuer Science Universi College Cork Ocober 201 direced graph, real edge weighs Le he lengh of a pah
Virtual Recovery of Excavated Archaeological Finds
 Virual Recovery of Excavaed Archaeological Finds Jiang Yu ZHENG, Zhong Li ZHANG*, Norihiro ABE Kyushu Insiue of Technology, Iizuka, Fukuoka 820, Japan *Museum of he Terra-Coa Warrlors and Horses, Lin Tong,
Virual Recovery of Excavaed Archaeological Finds Jiang Yu ZHENG, Zhong Li ZHANG*, Norihiro ABE Kyushu Insiue of Technology, Iizuka, Fukuoka 820, Japan *Museum of he Terra-Coa Warrlors and Horses, Lin Tong,
Introduction to Data-Driven Animation: Programming with Motion Capture Jehee Lee
 Inroducion o Daa-Driven Animaion: Programming wih Moion Caure Jehee Lee Seoul Naional Universiy Daa-Driven Animaion wih Moion Caure Programming wih Moion Caure Why is i difficul? Encomass a lo of heerogeneous
Inroducion o Daa-Driven Animaion: Programming wih Moion Caure Jehee Lee Seoul Naional Universiy Daa-Driven Animaion wih Moion Caure Programming wih Moion Caure Why is i difficul? Encomass a lo of heerogeneous
Chapter Six Chapter Six
 Chaper Si Chaper Si 0 CHAPTER SIX ConcepTess and Answers and Commens for Secion.. Which of he following graphs (a) (d) could represen an aniderivaive of he funcion shown in Figure.? Figure. (a) (b) (c)
Chaper Si Chaper Si 0 CHAPTER SIX ConcepTess and Answers and Commens for Secion.. Which of he following graphs (a) (d) could represen an aniderivaive of he funcion shown in Figure.? Figure. (a) (b) (c)
Point Cloud Representation of 3D Shape for Laser- Plasma Scanning 3D Display
 Poin Cloud Represenaion of 3D Shape for Laser- Plasma Scanning 3D Displa Hiroo Ishikawa and Hideo Saio Keio Universi E-mail {hiroo, saio}@ozawa.ics.keio.ac.jp Absrac- In his paper, a mehod of represening
Poin Cloud Represenaion of 3D Shape for Laser- Plasma Scanning 3D Displa Hiroo Ishikawa and Hideo Saio Keio Universi E-mail {hiroo, saio}@ozawa.ics.keio.ac.jp Absrac- In his paper, a mehod of represening
Principles of MRI EE225E / BIO265. Lecture 10. Instructor: Miki Lustig UC Berkeley, EECS. M. Lustig, EECS UC Berkeley
 Principles of MRI Lecure 0 EE225E / BIO265 Insrucor: Miki Lusig UC Berkeley, EECS Bloch Eq. For Recepion No B() : 2 4 Ṁ x Ṁ y Ṁ z 3 5 = 2 6 4 T 2 ~ G ~r 0 ~G ~r T 2 0 0 0 T 3 2 7 5 4 M x M y M z 3 5 +
Principles of MRI Lecure 0 EE225E / BIO265 Insrucor: Miki Lusig UC Berkeley, EECS Bloch Eq. For Recepion No B() : 2 4 Ṁ x Ṁ y Ṁ z 3 5 = 2 6 4 T 2 ~ G ~r 0 ~G ~r T 2 0 0 0 T 3 2 7 5 4 M x M y M z 3 5 +
A High-Performance Area-Efficient Multifunction Interpolator
 A High-Performance Area-Efficien Mulifuncion Inerpolaor ARITH Suar Oberman Michael Siu Ouline Wha i a GPU? Targe applicaion and floaing poin Shader microarchiecure High-order funcion Aribue inerpolaion
A High-Performance Area-Efficien Mulifuncion Inerpolaor ARITH Suar Oberman Michael Siu Ouline Wha i a GPU? Targe applicaion and floaing poin Shader microarchiecure High-order funcion Aribue inerpolaion
ME 406 Assignment #1 Solutions
 Assignmen#1Sol.nb 1 ME 406 Assignmen #1 Soluions PROBLEM 1 We define he funcion for Mahemaica. In[1]:= f@_d := Ep@D - 4 Sin@D (a) We use Plo o consruc he plo. In[2]:= Plo@f@D, 8, -5, 5
Assignmen#1Sol.nb 1 ME 406 Assignmen #1 Soluions PROBLEM 1 We define he funcion for Mahemaica. In[1]:= f@_d := Ep@D - 4 Sin@D (a) We use Plo o consruc he plo. In[2]:= Plo@f@D, 8, -5, 5
parametric spline curves
 arameric sline curves comuer grahics arameric curves 9 fabio ellacini curves used in many conexs fons animaion ahs shae modeling differen reresenaion imlici curves arameric curves mosly used comuer grahics
arameric sline curves comuer grahics arameric curves 9 fabio ellacini curves used in many conexs fons animaion ahs shae modeling differen reresenaion imlici curves arameric curves mosly used comuer grahics
In Proceedings of CVPR '96. Structure and Motion of Curved 3D Objects from. using these methods [12].
![In Proceedings of CVPR '96. Structure and Motion of Curved 3D Objects from. using these methods [12].](/thumbs/94/119423762.jpg "In Proceedings of CVPR '96. Structure and Motion of Curved 3D Objects from. using these methods [12].") In Proceedings of CVPR '96 Srucure and Moion of Curved 3D Objecs from Monocular Silhouees B Vijayakumar David J Kriegman Dep of Elecrical Engineering Yale Universiy New Haven, CT 652-8267 Jean Ponce Compuer
In Proceedings of CVPR '96 Srucure and Moion of Curved 3D Objecs from Monocular Silhouees B Vijayakumar David J Kriegman Dep of Elecrical Engineering Yale Universiy New Haven, CT 652-8267 Jean Ponce Compuer
Learning Topological Image Transforms Using Cellular Simultaneous Recurrent Networks
 Proceedings of Inernaional Join Conference on Neural Neworks Dallas Texas USA Augus 4-9 013 Learning Topological Image Transforms Using Cellular Simulaneous Recurren Neworks J. Keih Anderson Deparmen of
Proceedings of Inernaional Join Conference on Neural Neworks Dallas Texas USA Augus 4-9 013 Learning Topological Image Transforms Using Cellular Simulaneous Recurren Neworks J. Keih Anderson Deparmen of
arxiv: v1 [cs.cv] 25 Apr 2017
![arxiv: v1 [cs.cv] 25 Apr 2017](/thumbs/81/84263892.jpg "arxiv: v1 [cs.cv] 25 Apr 2017") Sudheendra Vijayanarasimhan Susanna Ricco svnaras@google.com ricco@google.com... arxiv:1704.07804v1 [cs.cv] 25 Apr 2017 SfM-Ne: Learning of Srucure and Moion from Video Cordelia Schmid Esimaed deph, camera
Sudheendra Vijayanarasimhan Susanna Ricco svnaras@google.com ricco@google.com... arxiv:1704.07804v1 [cs.cv] 25 Apr 2017 SfM-Ne: Learning of Srucure and Moion from Video Cordelia Schmid Esimaed deph, camera
LAMP: 3D Layered, Adaptive-resolution and Multiperspective Panorama - a New Scene Representation
 Submission o Special Issue of CVIU on Model-based and Image-based 3D Scene Represenaion for Ineracive Visualizaion LAMP: 3D Layered, Adapive-resoluion and Muliperspecive Panorama - a New Scene Represenaion
Submission o Special Issue of CVIU on Model-based and Image-based 3D Scene Represenaion for Ineracive Visualizaion LAMP: 3D Layered, Adapive-resoluion and Muliperspecive Panorama - a New Scene Represenaion
Image Warping. Computational Photography Derek Hoiem, University of Illinois 09/28/17. Photo by Sean Carroll
 Image Warping 9/28/7 Man slides from Alosha Efros + Steve Seitz Computational Photograph Derek Hoiem, Universit of Illinois Photo b Sean Carroll Reminder: Proj 2 due monda Much more difficult than project
Image Warping 9/28/7 Man slides from Alosha Efros + Steve Seitz Computational Photograph Derek Hoiem, Universit of Illinois Photo b Sean Carroll Reminder: Proj 2 due monda Much more difficult than project
Visual Perception as Bayesian Inference. David J Fleet. University of Toronto
 Visual Percepion as Bayesian Inference David J Flee Universiy of Torono Basic rules of probabiliy sum rule (for muually exclusive a ): produc rule (condiioning): independence (def n ): Bayes rule: marginalizaion:
Visual Percepion as Bayesian Inference David J Flee Universiy of Torono Basic rules of probabiliy sum rule (for muually exclusive a ): produc rule (condiioning): independence (def n ): Bayes rule: marginalizaion:
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
Landmarks: A New Model for Similarity-Based Pattern Querying in Time Series Databases
 Lmarks: A New Model for Similariy-Based Paern Querying in Time Series Daabases Chang-Shing Perng Haixun Wang Sylvia R. Zhang D. So Parker perng@cs.ucla.edu hxwang@cs.ucla.edu Sylvia Zhang@cle.com so@cs.ucla.edu
Lmarks: A New Model for Similariy-Based Paern Querying in Time Series Daabases Chang-Shing Perng Haixun Wang Sylvia R. Zhang D. So Parker perng@cs.ucla.edu hxwang@cs.ucla.edu Sylvia Zhang@cle.com so@cs.ucla.edu
Proceeding of the 6 th International Symposium on Artificial Intelligence and Robotics & Automation in Space: i-sairas 2001, Canadian Space Agency,
 Proceeding of he 6 h Inernaional Symposium on Arificial Inelligence and Roboics & Auomaion in Space: i-sairas 00, Canadian Space Agency, S-Huber, Quebec, Canada, June 8-, 00. Muli-resoluion Mapping Using
Proceeding of he 6 h Inernaional Symposium on Arificial Inelligence and Roboics & Auomaion in Space: i-sairas 00, Canadian Space Agency, S-Huber, Quebec, Canada, June 8-, 00. Muli-resoluion Mapping Using
Learning in Games via Opponent Strategy Estimation and Policy Search
 Learning in Games via Opponen Sraegy Esimaion and Policy Search Yavar Naddaf Deparmen of Compuer Science Universiy of Briish Columbia Vancouver, BC yavar@naddaf.name Nando de Freias (Supervisor) Deparmen
Learning in Games via Opponen Sraegy Esimaion and Policy Search Yavar Naddaf Deparmen of Compuer Science Universiy of Briish Columbia Vancouver, BC yavar@naddaf.name Nando de Freias (Supervisor) Deparmen
A METHOD OF MODELING DEFORMATION OF AN OBJECT EMPLOYING SURROUNDING VIDEO CAMERAS
 A METHOD OF MODELING DEFORMATION OF AN OBJECT EMLOYING SURROUNDING IDEO CAMERAS Joo Kooi TAN, Seiji ISHIKAWA Deparmen of Mechanical and Conrol Engineering Kushu Insiue of Technolog, Japan ehelan@is.cnl.kuech.ac.jp,
A METHOD OF MODELING DEFORMATION OF AN OBJECT EMLOYING SURROUNDING IDEO CAMERAS Joo Kooi TAN, Seiji ISHIKAWA Deparmen of Mechanical and Conrol Engineering Kushu Insiue of Technolog, Japan ehelan@is.cnl.kuech.ac.jp,
Real-time 2D Video/3D LiDAR Registration
 Real-ime 2D Video/3D LiDAR Regisraion C. Bodenseiner Fraunhofer IOSB chrisoph.bodenseiner@iosb.fraunhofer.de M. Arens Fraunhofer IOSB michael.arens@iosb.fraunhofer.de Absrac Progress in LiDAR scanning
Real-ime 2D Video/3D LiDAR Regisraion C. Bodenseiner Fraunhofer IOSB chrisoph.bodenseiner@iosb.fraunhofer.de M. Arens Fraunhofer IOSB michael.arens@iosb.fraunhofer.de Absrac Progress in LiDAR scanning
DAGM 2011 Tutorial on Convex Optimization for Computer Vision
 DAGM 2011 Tuorial on Convex Opimizaion for Compuer Vision Par 3: Convex Soluions for Sereo and Opical Flow Daniel Cremers Compuer Vision Group Technical Universiy of Munich Graz Universiy of Technology
DAGM 2011 Tuorial on Convex Opimizaion for Compuer Vision Par 3: Convex Soluions for Sereo and Opical Flow Daniel Cremers Compuer Vision Group Technical Universiy of Munich Graz Universiy of Technology
Ray Casting. Outline. Outline in Code
 Foundaions of ompuer Graphics Online Lecure 10: Ray Tracing 2 Nus and ols amera Ray asing Ravi Ramamoorhi Ouline amera Ray asing (choose ray direcions) Ray-objec inersecions Ray-racing ransformed objecs
Foundaions of ompuer Graphics Online Lecure 10: Ray Tracing 2 Nus and ols amera Ray asing Ravi Ramamoorhi Ouline amera Ray asing (choose ray direcions) Ray-objec inersecions Ray-racing ransformed objecs
Mobile Robots Mapping
 Mobile Robos Mapping 1 Roboics is Easy conrol behavior percepion modelling domain model environmen model informaion exracion raw daa planning ask cogniion reasoning pah planning navigaion pah execuion
Mobile Robos Mapping 1 Roboics is Easy conrol behavior percepion modelling domain model environmen model informaion exracion raw daa planning ask cogniion reasoning pah planning navigaion pah execuion
TOOTH ALIGNMENT OF THE DENTAL CAST USING 3D THIN PLATE SPLINE
 TOOTH ALIGMET OF THE DETAL CAST USIG 3D THI LATE SLIE Chanjira Sinhanaohin, Wisaru Bholsihi, Wichi Tharanon aional Science and Technolog Developmen Agenc (STDA 111 Thailand Science ark, hahon-yohin d,
TOOTH ALIGMET OF THE DETAL CAST USIG 3D THI LATE SLIE Chanjira Sinhanaohin, Wisaru Bholsihi, Wichi Tharanon aional Science and Technolog Developmen Agenc (STDA 111 Thailand Science ark, hahon-yohin d,
MOTION DETECTORS GRAPH MATCHING LAB PRE-LAB QUESTIONS
 NME: TE: LOK: MOTION ETETORS GRPH MTHING L PRE-L QUESTIONS 1. Read he insrucions, and answer he following quesions. Make sure you resae he quesion so I don hae o read he quesion o undersand he answer..
NME: TE: LOK: MOTION ETETORS GRPH MTHING L PRE-L QUESTIONS 1. Read he insrucions, and answer he following quesions. Make sure you resae he quesion so I don hae o read he quesion o undersand he answer..
A NEW APPROACH FOR 3D MODELS TRANSMISSION
 A NEW APPROACH FOR 3D MODELS TRANSMISSION A. Guarnieri a, F. Piroi a, M. Ponin a, A. Veore a a CIRGEO, Inerdep. Research Cener of Carography, Phoogrammery, Remoe Sensing and GIS Universiy of Padova, Agripolis
A NEW APPROACH FOR 3D MODELS TRANSMISSION A. Guarnieri a, F. Piroi a, M. Ponin a, A. Veore a a CIRGEO, Inerdep. Research Cener of Carography, Phoogrammery, Remoe Sensing and GIS Universiy of Padova, Agripolis
Dynamic Depth Recovery from Multiple Synchronized Video Streams 1
 Dynamic Deph Recoery from Muliple ynchronized Video reams Hai ao, Harpree. awhney, and Rakesh Kumar Deparmen of Compuer Engineering arnoff Corporaion Uniersiy of California a ana Cruz Washingon Road ana
Dynamic Deph Recoery from Muliple ynchronized Video reams Hai ao, Harpree. awhney, and Rakesh Kumar Deparmen of Compuer Engineering arnoff Corporaion Uniersiy of California a ana Cruz Washingon Road ana
X-Splines : A Spline Model Designed for the End-User
 X-Splines : A Spline Model Designed for he End-User Carole Blanc Chrisophe Schlic LaBRI 1 cours de la libéraion, 40 alence (France) [blancjschlic]@labri.u-bordeaux.fr Absrac his paper presens a new model
X-Splines : A Spline Model Designed for he End-User Carole Blanc Chrisophe Schlic LaBRI 1 cours de la libéraion, 40 alence (France) [blancjschlic]@labri.u-bordeaux.fr Absrac his paper presens a new model
Optimal Crane Scheduling
 Opimal Crane Scheduling Samid Hoda, John Hooker Laife Genc Kaya, Ben Peerson Carnegie Mellon Universiy Iiro Harjunkoski ABB Corporae Research EWO - 13 November 2007 1/16 Problem Track-mouned cranes move
Opimal Crane Scheduling Samid Hoda, John Hooker Laife Genc Kaya, Ben Peerson Carnegie Mellon Universiy Iiro Harjunkoski ABB Corporae Research EWO - 13 November 2007 1/16 Problem Track-mouned cranes move
A Prototype of Autonomous Intelligent Surveillance Cameras
 Universi of Wollongong Research Online Facul of Informaics - Papers (Archive) Facul of Engineering and Informaion Sciences 2006 A Proope of Auonomous Inelligen Surveillance Cameras Wanqing Li Universi
Universi of Wollongong Research Online Facul of Informaics - Papers (Archive) Facul of Engineering and Informaion Sciences 2006 A Proope of Auonomous Inelligen Surveillance Cameras Wanqing Li Universi
Rendering Pipeline/ OpenGL
 Grading Programming Assignmens: 4% Chaper 2 2D Game: Inro o (6%) ou now 3D Transformaions modeling/animaion (11%) Basics of Compuer Graphics: Rendering pipeline (11%) Ray racing (12%) compuer graphics
Grading Programming Assignmens: 4% Chaper 2 2D Game: Inro o (6%) ou now 3D Transformaions modeling/animaion (11%) Basics of Compuer Graphics: Rendering pipeline (11%) Ray racing (12%) compuer graphics
Real-Time Non-Rigid Multi-Frame Depth Video Super-Resolution
 Real-Time Non-Rigid Muli-Frame Deph Video Super-Resoluion Kassem Al Ismaeil 1, Djamila Aouada 1, Thomas Solignac 2, Bruno Mirbach 2, Björn Oersen 1 1 Inerdisciplinary Cenre for Securiy, Reliabiliy, and
Real-Time Non-Rigid Muli-Frame Deph Video Super-Resoluion Kassem Al Ismaeil 1, Djamila Aouada 1, Thomas Solignac 2, Bruno Mirbach 2, Björn Oersen 1 1 Inerdisciplinary Cenre for Securiy, Reliabiliy, and
Page 1. News. Compositing, Clipping, Curves. Week 3, Thu May 26. Schedule Change. Homework 1 Common Mistakes. Midterm Logistics.
 Universiy of Briish Columbia CPSC 4 Compuer Graphics May-June 5 Tamara Munzner Composiing, Clipping, Curves Week, Thu May 6 hp://www.ugrad.cs.ubc.ca/~cs4/vmay5 News era lab coverage: Mon -, Wed -4 P demo
Universiy of Briish Columbia CPSC 4 Compuer Graphics May-June 5 Tamara Munzner Composiing, Clipping, Curves Week, Thu May 6 hp://www.ugrad.cs.ubc.ca/~cs4/vmay5 News era lab coverage: Mon -, Wed -4 P demo
An Improved Square-Root Nyquist Shaping Filter
 An Improved Square-Roo Nyquis Shaping Filer fred harris San Diego Sae Universiy fred.harris@sdsu.edu Sridhar Seshagiri San Diego Sae Universiy Seshigar.@engineering.sdsu.edu Chris Dick Xilinx Corp. chris.dick@xilinx.com
An Improved Square-Roo Nyquis Shaping Filer fred harris San Diego Sae Universiy fred.harris@sdsu.edu Sridhar Seshagiri San Diego Sae Universiy Seshigar.@engineering.sdsu.edu Chris Dick Xilinx Corp. chris.dick@xilinx.com
3-D Object Modeling and Recognition for Telerobotic Manipulation
 Research Showcase @ CMU Roboics Insiue School of Compuer Science 1995 3-D Objec Modeling and Recogniion for Teleroboic Manipulaion Andrew Johnson Parick Leger Regis Hoffman Marial Heber James Osborn Follow
Research Showcase @ CMU Roboics Insiue School of Compuer Science 1995 3-D Objec Modeling and Recogniion for Teleroboic Manipulaion Andrew Johnson Parick Leger Regis Hoffman Marial Heber James Osborn Follow
Image segmentation. Motivation. Objective. Definitions. A classification of segmentation techniques. Assumptions for thresholding
 Moivaion Image segmenaion Which pixels belong o he same objec in an image/video sequence? (spaial segmenaion) Which frames belong o he same video sho? (emporal segmenaion) Which frames belong o he same
Moivaion Image segmenaion Which pixels belong o he same objec in an image/video sequence? (spaial segmenaion) Which frames belong o he same video sho? (emporal segmenaion) Which frames belong o he same
EP2200 Queueing theory and teletraffic systems
 EP2200 Queueing heory and eleraffic sysems Vikoria Fodor Laboraory of Communicaion Neworks School of Elecrical Engineering Lecure 1 If you wan o model neworks Or a comple daa flow A queue's he key o help
EP2200 Queueing heory and eleraffic sysems Vikoria Fodor Laboraory of Communicaion Neworks School of Elecrical Engineering Lecure 1 If you wan o model neworks Or a comple daa flow A queue's he key o help
Matrix Transformations. Affine Transformations
 Matri ransformations Basic Graphics ransforms ranslation Scaling Rotation Reflection Shear All Can be Epressed As Linear Functions of the Original Coordinates : A + B + C D + E + F ' A ' D 1 B E C F 1
Matri ransformations Basic Graphics ransforms ranslation Scaling Rotation Reflection Shear All Can be Epressed As Linear Functions of the Original Coordinates : A + B + C D + E + F ' A ' D 1 B E C F 1
CS 335 Graphics and Multimedia. Geometric Warping
 CS 335 Graphics and Multimedia Geometric Warping Geometric Image Operations Eample transformations Straightforward methods and their problems The affine transformation Transformation algorithms: Forward
CS 335 Graphics and Multimedia Geometric Warping Geometric Image Operations Eample transformations Straightforward methods and their problems The affine transformation Transformation algorithms: Forward
Ray Tracing II. Improving Raytracing Speed. Improving Computational Complexity. Raytracing Computational Complexity
 Ra Tracing II Iproving Raracing Speed Copuer Graphics Ra Tracing II 2005 Fabio Pellacini 1 Copuer Graphics Ra Tracing II 2005 Fabio Pellacini 2 Raracing Copuaional Coplei ra-scene inersecion is epensive
Ra Tracing II Iproving Raracing Speed Copuer Graphics Ra Tracing II 2005 Fabio Pellacini 1 Copuer Graphics Ra Tracing II 2005 Fabio Pellacini 2 Raracing Copuaional Coplei ra-scene inersecion is epensive
CSE328 Fundamentals of Computer Graphics: Theory, Algorithms, and Applications
 CSE328 Fundamentals of Computer Graphics: Theor, Algorithms, and Applications Hong in State Universit of New York at Ston Brook (Ston Brook Universit) Ston Brook, New York 794-44 Tel: (63)632-845; Fa:
CSE328 Fundamentals of Computer Graphics: Theor, Algorithms, and Applications Hong in State Universit of New York at Ston Brook (Ston Brook Universit) Ston Brook, New York 794-44 Tel: (63)632-845; Fa:
Video Content Description Using Fuzzy Spatio-Temporal Relations
 Proceedings of he 4s Hawaii Inernaional Conference on Sysem Sciences - 008 Video Conen Descripion Using Fuzzy Spaio-Temporal Relaions rchana M. Rajurkar *, R.C. Joshi and Sananu Chaudhary 3 Dep of Compuer
Proceedings of he 4s Hawaii Inernaional Conference on Sysem Sciences - 008 Video Conen Descripion Using Fuzzy Spaio-Temporal Relaions rchana M. Rajurkar *, R.C. Joshi and Sananu Chaudhary 3 Dep of Compuer
MOTION TRACKING is a fundamental capability that
 TECHNICAL REPORT CRES-05-008, CENTER FOR ROBOTICS AND EMBEDDED SYSTEMS, UNIVERSITY OF SOUTHERN CALIFORNIA 1 Real-ime Moion Tracking from a Mobile Robo Boyoon Jung, Suden Member, IEEE, Gaurav S. Sukhame,
TECHNICAL REPORT CRES-05-008, CENTER FOR ROBOTICS AND EMBEDDED SYSTEMS, UNIVERSITY OF SOUTHERN CALIFORNIA 1 Real-ime Moion Tracking from a Mobile Robo Boyoon Jung, Suden Member, IEEE, Gaurav S. Sukhame,
Motion Level-of-Detail: A Simplification Method on Crowd Scene
 Moion Level-of-Deail: A Simplificaion Mehod on Crowd Scene Absrac Junghyun Ahn VR lab, EECS, KAIST ChocChoggi@vr.kais.ac.kr hp://vr.kais.ac.kr/~zhaoyue Recen echnological improvemen in characer animaion
Moion Level-of-Deail: A Simplificaion Mehod on Crowd Scene Absrac Junghyun Ahn VR lab, EECS, KAIST ChocChoggi@vr.kais.ac.kr hp://vr.kais.ac.kr/~zhaoyue Recen echnological improvemen in characer animaion
Occlusion-Free Hand Motion Tracking by Multiple Cameras and Particle Filtering with Prediction
 58 IJCSNS Inernaional Journal of Compuer Science and Nework Securiy, VOL.6 No.10, Ocober 006 Occlusion-Free Hand Moion Tracking by Muliple Cameras and Paricle Filering wih Predicion Makoo Kao, and Gang
58 IJCSNS Inernaional Journal of Compuer Science and Nework Securiy, VOL.6 No.10, Ocober 006 Occlusion-Free Hand Moion Tracking by Muliple Cameras and Paricle Filering wih Predicion Makoo Kao, and Gang
Research Article Auto Coloring with Enhanced Character Registration
 Compuer Games Technology Volume 2008, Aricle ID 35398, 7 pages doi:0.55/2008/35398 Research Aricle Auo Coloring wih Enhanced Characer Regisraion Jie Qiu, Hock Soon Seah, Feng Tian, Quan Chen, Zhongke Wu,
Compuer Games Technology Volume 2008, Aricle ID 35398, 7 pages doi:0.55/2008/35398 Research Aricle Auo Coloring wih Enhanced Characer Regisraion Jie Qiu, Hock Soon Seah, Feng Tian, Quan Chen, Zhongke Wu,
Parallax360: Stereoscopic 360 Scene Representation for Head-Motion Parallax
 Parallax360: Sereoscopic 360 Scene Represenaion for Head-Moion Parallax Bicheng Luo, Feng Xu, Chrisian Richard and Jun-Hai Yong (b) (c) (a) (d) (e) Fig. 1. We propose a novel image-based represenaion o
Parallax360: Sereoscopic 360 Scene Represenaion for Head-Moion Parallax Bicheng Luo, Feng Xu, Chrisian Richard and Jun-Hai Yong (b) (c) (a) (d) (e) Fig. 1. We propose a novel image-based represenaion o
A GRAPHICS PROCESSING UNIT IMPLEMENTATION OF THE PARTICLE FILTER
 A GRAPHICS PROCESSING UNIT IMPLEMENTATION OF THE PARTICLE FILTER ABSTRACT Modern graphics cards for compuers, and especially heir graphics processing unis (GPUs), are designed for fas rendering of graphics.
A GRAPHICS PROCESSING UNIT IMPLEMENTATION OF THE PARTICLE FILTER ABSTRACT Modern graphics cards for compuers, and especially heir graphics processing unis (GPUs), are designed for fas rendering of graphics.
Upper Body Tracking for Human-Machine Interaction with a Moving Camera
 The 2009 IEEE/RSJ Inernaional Conference on Inelligen Robos and Sysems Ocober -5, 2009 S. Louis, USA Upper Body Tracking for Human-Machine Ineracion wih a Moving Camera Yi-Ru Chen, Cheng-Ming Huang, and
The 2009 IEEE/RSJ Inernaional Conference on Inelligen Robos and Sysems Ocober -5, 2009 S. Louis, USA Upper Body Tracking for Human-Machine Ineracion wih a Moving Camera Yi-Ru Chen, Cheng-Ming Huang, and