Image Alignment AJIT RAJWADE
|
|
|
- Philomena Walton
- 5 years ago
- Views:
Transcription
1 Image Alignment AJIT RAJWADE
2 Basics A digital image a discrete/sampled version of a visual stimulus Can be regarded as a function I = f(,) where (,) are spatial (integer) coordinates in a domain W = [0,-] [0,W-]. Each ordered pair (,) is called a piel. The piel is generall square (sometimes rectangular) in shape.
3 Basics Piel dimensions (height/width) relate to the spatial resolution of the sensor in the camera that collects light reflected from a scene.
4 Basics In a tpical grascale image, the intensit values f(,) lie in the range from 0 to 55 (8 bit integers). The are quantized versions continuous values corresponding to the actual light intensit that strikes a light sensor in the camera.
 Piels in phsical correspondence (containing")
5 Image Alignment Consider images I and I of a scene acquired through different viewpoints. Piels in digital correspondence (same coordinate values in the image domain W, not necessaril containing measurements of the same phsical point) Piels in phsical correspondence (containing measurements of the same phsical point, but not necessaril the same coordinate values in the image domain W)
6 Image Alignment I and I are said to be aligned if for ever (,) in the domain W, the piels in I and I are in phsical correspondence. Image alignment (also called registration) is the process of correcting for the relative motion between I and I.
7 Image alignment: steps First step: motion estimation Second step: image warping
8 Motion estimation
9 Motion Models Let us denote the coordinates in I as (, ) and those in I as (, ). Translation: Rotation about point (0,0) anti-clockwise through angle q t t W ), ( cos sin sin cos cos sin sin cos θ θ θ θ θ θ θ θ D Rotation matri (orthonormal matri)
10 Motion Models Rotation about point ( c, c ) anti-clockwise through angle q 0 0 cos sin sin cos cos sin sin cos c c c c c c c c c c θ θ θ θ θ ) ( θ ) ( θ ) ( θ ) ( -Perform translation such that ( c, c ) coincides with the origin. -Rotate about the new origin. -Translate back.
11 Motion Models Rotation and translation: Affine transformation: rotation, translation, scaling and shearing 0 0 cos sin sin cos cos sin sin cos c c c c c c t θ θ t θ θ t θ ) ( θ ) ( t θ ) ( θ ) ( 0 0 t A A t A A Assumption: the sub-matri A is NOT rank deficient, otherwise it will transform two-dimensional figures into a line or a point
12 Motion Models The D affine motion model (including translation in X and Y direction) includes 6 degrees of freedom. Note: this motion model accounts for in-plane motion onl (eample: not an appropriate model for head profile view versus head frontal view )
13 Motion Models Consider two images (perspective projection) of a plane in 3D space. These images are said to be related b a motion model called as a planar homograph which we studied last class.
14 P Plane π p p O O



15
16 Motion Models summar Parametric models Motion Model DOF D rigid +=3 D similarit (rigid+ uniform scaling) D affine 6 omograph 8 3D rigid 6 3+=4 3D similarit 6+=7 3D affine D (or 3D) non-parametric (also called non-rigid or deformable ) number of piels (or 3 number of voels)

17 Alignment with control points Solve for unknown parameters using leastsquares framework (i.e. pseudo-inverse) Appl the motion based on these parameters to the first image Control points: pairs of phsicall corresponding points mabe marked out manuall, or automaticall using geometric properties of the image. Number of control points N MUST be >= u/, where u = number of unknown parameters in the motion model (each point has two coordinates and ) A A 0. A A k k t t k k
18 Least squares motion estimation: affine For the affine model, we can write the earlier equation as follows: * * arg min ) ( F A noise A P P PP P P A AP P T T 0 0 t A A t A A A i j F X ij X ) ( 0 ) ( ( ) ( ) ( T T T PP P P A P AP P A AP ) AP P A AP P A E E F
19 Least squares motion estimation: homograph For the homograph motion model, we have previousl seen that the solution is given as follows: has size 9 9, has size ; s.t. arg min * h A h A h h Ah h h N i i i i i i i i i i i i i i t
20 Least squares motion estimation: rigid motion For the rigid motion model, we can write the earlier equation as follows: P RP t noise ( R*, t* ) arg min P RP t ( R, t) F s.t. R T R I This problem cannot be solved correctl b a simple pseudoinverse because a pseudo-inverse does not impose the fact that R is an orthogonal matri. The correct solution uses the singular value decomposition. It is detailed here below assuming that t = 0 (the solution can be etended to the case where t is not 0) Also see:
21 Segwa: Singular value Decomposition For an m n matri A, the following decomposition alwas eists: A USV U V T T U V S R mn T UU VV, A R T T I m I n mn,,u R,V R mm nn,, Diagonal matri with nonnegative entries on the diagonal called singular values. T Columns of U are the eigenvecto rs of AA (called theleft singular vectors). T Columns of V are the eigenvecto rs of A A (called the right singular v ectors). The non - zero singular values are the positivesquare roots of non - zero eigenvalue s of AA T or A T A.
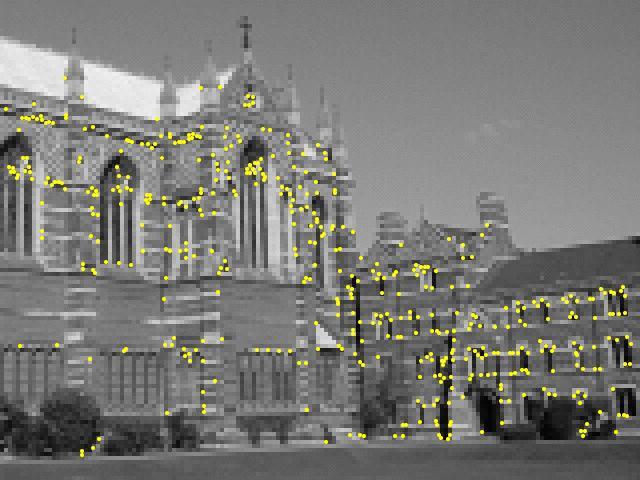
22 Marking control points Control points (also called feature points, salient points, fiducials or salient feature points) can be manuall marked which is error-prone and tedious. owever this process can also be automated b using salient feature point detectors which are invariant to geometric transformations. An ecellent eample of this is SIFT (scale invariant feature transform).
23 Marking control points: SIFT SIFT does two things: it detect salient points in each image and associates each salient point with a feature vector. The feature vector is a characteristic of a small region of the image around the salient point. The feature vector for each salient point is provabl invariant to translation, rotation and reflection and approimatel (or as observed empiricall) invariant to affine transformations and even some perspective changes. The feature vector is also provabl invariant to several illumination changes of the form I = ai + b. where I and I are observed intensities, and a,b are coefficients (constant for the whole image). It is empiricall seen to be invariant to man other tpes of illumination changes.


24
25 Marking control points: SIFT Due to this invariance, the SIFT technique is able to do a good job at matching salient points from one image to another. The motion model can then be estimated from the matched points.
26 Image warping
27 Image warping After motion estimation, the net step is to warp one of the images (sa) I using the estimated motion represented b a matri (sa T).
28 Forward warping: Image Warping -Appl the motion Tv to ever coordinate vector v = [ ] in the original image (i.e. I ). -Cop the intensit value from v in I to the new location (Tv) in the warped image. If the new location is not an integer (most likel), then round off to nearest integer. I (, ) I warped (round(tv))
29 Forward warping: Image Warping -Can leave the destination image with some holes if ou scale up. -Can lead to multiple answers in one piel if ou scale down.
30 Image Warping Reverse warping: Note: this assumes that T is an invertible transformation, which is guaranteed in the applications we are dealing with. It is not guaranteed in case of non-rigid deformations, given the pielized (i.e. discrete) image coordinate sstems. -For ever coordinate v = [ ] in the destination image, cop the intensit value from coordinate T - v in the original image. In case of non-integer value, perform interpolation (nearest neighbor or bilinear) I (T - (, )) I warped (, )
31 Interpolation a a4 A D B C A,B,C,D denotes Areas of these four rectangles a a3 Nearest neighbor method: Use value a 4 (as the piel that is nearest to the red point contains value a 4 ) Bilinear method: Use the following value, a weighted combination of the four neighboring piel values, with more weight to nearer values: Ba4 Aa3 Ca ( A B C Da D) Ba 4 Aa 3 Ca Da I (T - (, )) I warped (, )
32 Warping with homographies Consider the equation: While warping, note the division b w to ield,im and,im. This is different from the affine case! 33, 3, 3 3,, ,,, 33, 3, 3 3,, ,,, ,, w v u w v u w v w v w u w v u w v u w u w v u w v u im im im im im im im im im im im im im im im, im, p p
33 Image alignment using image similarit measures (without using control points)


34 Control points are not alwas available In some scenes, good control points ma not be available Or the cannot sometimes be reliabl matched from one image to another. Eample: some modalities such as ultrasound, or images that are heavil blurred or nois.
35 Alignment with mean squared error Mean squared error is given b: MSSD N, W ( I (, ) I(, )) Find motion parameters as follows: T T * arg min A A 0 A A 0 MSSD T ( I t t, v ( v), I ( Tv)) Find transformation matri T which produces the least value of MSSD I = called the fied (or reference) image I = called the moving image
36 Alignment with mean squared error For simplicit, assume there was onl rotation and translation. Then we have T T * arg min MSSDT ( I( v), I( Tv)) cosq sinq 0 sinq cosq 0 t t, v
37 Alignment with mean-squared error There are man was to do this minimization. The simplest but inefficient wa is to do a brute-force search. Sample q, t and t uniforml from a certain range (eample: q from -45 to +45, t or t from -30 to +30). Appl this motion to I keeping I fied, and compute the MSSD. Each time, compute the MSSD. Pick the parameter values (i.e. q, t and t ) corresponding to minimum MSSD.
38 Alignment with mean squared error In the ideal case, the MSSD between two perfectl aligned images is 0. In practice, it will have some small non-zero value even under more or less perfect alignment due to sensor noise or slight mismatch in piel grids.


39 Careful: field of view issues! Fied image Region of overlap when the moving image is warped Note: compute MSSD onl over region of overlap.









40 Change in region of overlap, as the moving image is warped
41 Alignment with mean squared error MSSD is one eample of an image similarit measure. MAJOR ASSUMPTION: Phsicall corresponding piels have the same intensit, i.e. the are acquired b similar cameras and under the same lighting condition (this is often called as mono-modal image registration).

 Changes in lighting condition This is called as")
42 Image alignment: Intensit changes in images Images acquired b different sensors (MR and CT, different tpes of MR, camera with and without flash, etc.) Changes in lighting condition This is called as multimodal image registration. MR-PD MR-T


43 /Flash_%8photograph%9 #mediaviewer/file:fill_flash. jpg upenn.edu/sbia/s oftware/dramms/ tutorials/prostate istmri.html
44 Image alignment: Intensit changes in images If following relationship eists and we knew the eact functional form (sa g), the solution is eas: I (, ) g( I(, )), (, ),(, ) W Phsicall corresponding points transformed MSSD N, W ( g( I (, )) I(, ))
45 Image alignment: Intensit changes in images What if the relationship eists in the following linear form, but we knew it onl partiall? Phsicall corresponding points; a and b are unknown, but we know the relationship is linear ), ( ), ( ), (, images of value average :, ) ), ( ( ) ), ( ( ) ), ( )( ), ( ( I I I I I I I I I I I I NCC W W W W ), ),(, (, ), ( ), ( b ai I Normalized cross-correlation, also called correlation-coefficient observe its relation to a noramlized vector dot product. We are taking the absolute value here, to take care of cases where one image has positive values and the other has negative values
46 Image alignment: Intensit changes in images Normalized crosscorrelation, also called correlation-coefficient ), ( ), ( ), (, images of value average :, ) ), ( ( ) ), ( ( ) ), ( )( ), ( ( I I I I I I I I I I I I NCC W W W, 0 0 )) ( ), ( ( arg ma * t A A t A A I I NCC v T Tv v T T
47 Image alignment: intensit changes in images? Assume there eists a functional relationship between intensities at phsicall corresponding locations in the two images. But suppose we didn t know it (most practical scenario) and couldn t find it out. We will use image histograms!
48 Image istogram In a tpical digital image, the intensit levels lie in the range [0,L-]. The histogram of the image is a discrete function of the form P(r k ) = n k /W, where r k is the k-th intensit value, and n k is the number of piels with that intensit. Sometimes, we ma consider a range of intensit values for one entr in the histogram, in which case r k = [r min k, r ma k] represents an intensit bin, and n k is the number of piels whose intensit falls within this bin. Note P(r k ) >= 0 alwas, and all the P(r k ) values sum up to.
49 Joint Image istogram Function of the form P(r k,r k ) where r k and r k represent intensit bins from the two images I and I respectivel. P(r k,r k ) = number of piels (,) such that I (,) and I (,) lie in bins r k and r k respectivel, divided b W.
50 Consider two 3 3 images above for eample sake. Their joint histogram is as follows: P(4,) = /9 P(,) = /9 P(3,6) = 3/9 P(6,3) = /9 P(,4) = /9 P(4,) = /9


51 I 0 Values in I from 0 to 60 I Values in I (from 0 to 60) Registered images: joint histogram plot looks streamlined ow was this plot generated? The joint histogram is plotted as a grascale image. Brighter points in this image indicate larger probabilities and darker points indicate lower probabilities.
 Misaligned images: joint")

52 0 Values in I from 0 to Values in I (from 0 to 60) Misaligned images: joint histogram plot looks dispersed We need a method to quantif how dispersed a joint histogram actuall is.
 Misaligned images: the joint histogram")

53 Values in I (0 to 60, top to bottom) Values in I (0 to 60) Misaligned images: the joint histogram plot appears dispersed. We need a method to quantif how dispersed a joint histogram actuall is.
54 Measure of dispersion Consider a discrete random variable X with normalized histogram P(X=) [also called the probabilit mass function]. The entrop of X is a measure of the uncertaint in X, given b the following formula: ( X ) P( X )log DX DX discrete set of values P( X that can E( log( P( X take Entrop is a function of the histogram of X, i.e. of P(X). It is not a function of the actual values of X. The entrop is alwas non-negative. X ) ))
55 Entrop The entrop is maimum if X has a discrete uniform distribution, i.e. P(X=) = P(X=) for all values and in DX. The maimum entrop value is log( DX ). The entrop is minimum (zero) if the normalized histogram of X is a Kronecker delta function, i.e. P(X= ) = for some, and P(X= ) = 0 for all.
56 Joint entrop The joint entrop of two random variables X and Y is given as follows: ( X, Y ) P( X, Y )log DX DY P( X Maimum entrop: -Uniform distribution on X and Y: entrop value log( DX DY ) Minimum entrop: -Kronecker delta, i.e. P(X=,Y= ) = for some, and P(X=,Y= ) = 0 for all or., Y )
57 Joint entrop Minimizing joint entrop is one method of aligning two images with different intensit profiles., 0 0 )) ( ), ( ( arg min * t A A t A A I I v T Tv v T T


58 I I : obtained b squaring the intensities of I, and rotating I anticlockwise b 30 degrees. I treated as moving image, I treated as fied image. Joint entrop minimum occurs at -30 degrees.
59 Image Alignment: Application Scenarios
60 Image Alignment: applications, related problems Template matching Image Panoramas Denoising image-bursts Collecting photos of paintings Face recognition 3D-D image registration
 inside a larger image. Eample: ees within face image Templates")
61 () Template Matching Look for the occurrence of a template (a smaller image) inside a larger image. Eample: ees within face image Templates



62 () Image Panoramas ch.html
63 ftp://ftp.math.ucla.edu/pub/camreport/cam09-6.pdf,buades et al, A note on multi-image denoising (3) Denoising image bursts An image burst is a collection of photos (of the same scene) taken in quick succession, each with ver short eposure time. Each image is sharp but usuall quite nois (even more so if the lighting was poor). Due to camera motion during burst acquisition, the images can be slightl misaligned. You can align the images (sa using SIFT for the control points and assuming a homograph motion model) and then simpl average the images after alignment to remove the noise.

64 Image bursts are tpicall used for photographing fast moving objects (water fountains, sports, children). ere, however, we use it for photograph under poor lighting conditions. photograph%9


65
66 (4) Photographing paintings The Google Art Project ( sought to acquire high-resolution photographs of paintings from famous museums. Acquiring such photographs requires ver specialized equipment, controlled illumination and intensive postprocessing. The major problem in photographing a painting is that different portions of the painting ehibit a glare, depending on the viewpoint in which the picture was taken. If the painting is behind a glass/plastic frame, one sometimes sees the reflection of the observer in it. These glares and reflections change their location, if ou change the viewpoint in which the picture was taken.

67 See:

68 See:
69 (4) Photographing paintings In an approach proposed b aro, Buades and Morel ( ), one takes several bursts of pictures of the painting from different viewpoints. All these images are aligned together using SIFT+homograph. This is followed b image fusion, i.e. computing an average or median of all aligned images (the paper actuall does this differentl, but that is not so important in the present contet of image alignment).

70
71 (5) Face recognition In a face recognition application, ou first store one or more images of each person (sa students/staff at IITB) in a database. These are called galler images. Given an image of a person at some later point of time, the task is to match the image to the set of galler images in order to determine identit. This is called the probe image. The probe image can be in a different pose than the galler image of the same person.


72 (5) Face recognition If the galler and pose image had onl inplane motion relative to each other, we could use one of the earlier discussed methods to find the unknown motion. Eample below:


73 (5) Face recognition But this does not handle the much more realistic issue of out-of-plane motion. What does one do then? edu/~jebara/htmlpapers /UTESIS/node30.html
 linking those vertices. http://www.jonasavrin.")
74 (6) 3D-D registration This motivates the use of 3D face scans or 3D models which can be acquired b 3D cameras such as stereo-cameras or structured light sensors. A 3D face scan consists of a set of vertices in 3D and a set of polgons (in 3D) linking those vertices.
75 (6) 3D-D registration Given the 3D model of a person, ou need to match the probe image to the model. ow? You create images b projecting the 3D model in different viewing directions, and then match each image with the probe image. ow man DoF involved? Si: direction of viewing (), distance of viewpoint along the viewing direction (), direction measured to which offset point in 3D (another 3). glulookat.html
 we")
76 Source: PhD thesis of Paul Viola at MIT (995) The method emploed was optimization of mutual information (closel related to the joint entrop technique) we studied in class.
77 What we learnt.. Affine motion model Forward and reverse image warping Field of view during image alignment Measures for Image alignment: sum of squared differences, normalized crosscorrelation, joint entrop Registration using control points
78 What we didn t learn Complicated motion models: higher degree polnomials, non-rigid models (eample: motion of an amoeba, motion of the heart during the cardiac ccle, facial epressions, etc.) Efficient techniques for optimizing the measure for image alignment
79 Aspects of image registration Are the images in D or in 3D? (D-D, 3D-3D, 3D-D) Is the motion model parametric or nonparametric (non-rigid)? Do the images have equal intensit values at phsicall corresponding points? (Unimodal or multimodal). This decides the objective function to be optimized.
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
Determining the 2d transformation that brings one image into alignment (registers it) with another. And
 with another. And") Last two lectures: Representing an image as a weighted combination of other images. Toda: A different kind of coordinate sstem change. Solving the biggest problem in using eigenfaces? Toda Recognition
Last two lectures: Representing an image as a weighted combination of other images. Toda: A different kind of coordinate sstem change. Solving the biggest problem in using eigenfaces? Toda Recognition
Perspective Projection Transformation
 Perspective Projection Transformation Where does a point of a scene appear in an image?? p p Transformation in 3 steps:. scene coordinates => camera coordinates. projection of camera coordinates into image
Perspective Projection Transformation Where does a point of a scene appear in an image?? p p Transformation in 3 steps:. scene coordinates => camera coordinates. projection of camera coordinates into image
How is project #1 going?
 How is project # going? Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam
How is project # going? Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam
CS 335 Graphics and Multimedia. Geometric Warping
 CS 335 Graphics and Multimedia Geometric Warping Geometric Image Operations Eample transformations Straightforward methods and their problems The affine transformation Transformation algorithms: Forward
CS 335 Graphics and Multimedia Geometric Warping Geometric Image Operations Eample transformations Straightforward methods and their problems The affine transformation Transformation algorithms: Forward
Last Lecture. Edge Detection. Filtering Pyramid
 Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam T. Roweis and William T.
Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam T. Roweis and William T.
Scale Invariant Feature Transform (SIFT) CS 763 Ajit Rajwade
 CS 763 Ajit Rajwade") Scale Invariant Feature Transform (SIFT) CS 763 Ajit Rajwade What is SIFT? It is a technique for detecting salient stable feature points in an image. For ever such point it also provides a set of features
Scale Invariant Feature Transform (SIFT) CS 763 Ajit Rajwade What is SIFT? It is a technique for detecting salient stable feature points in an image. For ever such point it also provides a set of features
Photo by Carl Warner
 Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Image Warping CSE399b, Spring 07 Computer Vision
 Image Warping CSE399b, Spring 7 Computer Vision http://maps.a9.com http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.html http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.html Autostiching on A9.com
Image Warping CSE399b, Spring 7 Computer Vision http://maps.a9.com http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.html http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.html Autostiching on A9.com
Interactive Computer Graphics. Warping and morphing. Warping and Morphing. Warping and Morphing. Lecture 14+15: Warping and Morphing. What is.
 Interactive Computer Graphics Warping and morphing Lecture 14+15: Warping and Morphing Lecture 14: Warping and Morphing: Slide 1 Lecture 14: Warping and Morphing: Slide 2 Warping and Morphing What is Warping
Interactive Computer Graphics Warping and morphing Lecture 14+15: Warping and Morphing Lecture 14: Warping and Morphing: Slide 1 Lecture 14: Warping and Morphing: Slide 2 Warping and Morphing What is Warping
Image Metamorphosis By Affine Transformations
 Image Metamorphosis B Affine Transformations Tim Mers and Peter Spiegel December 16, 2005 Abstract Among the man was to manipulate an image is a technique known as morphing. Image morphing is a special
Image Metamorphosis B Affine Transformations Tim Mers and Peter Spiegel December 16, 2005 Abstract Among the man was to manipulate an image is a technique known as morphing. Image morphing is a special
Transformations Between Two Images. Translation Rotation Rigid Similarity (scaled rotation) Affine Projective Pseudo Perspective Bi linear
 Affine Projective Pseudo Perspective Bi linear") Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear Fundamental Matri Lecture 13 pplications Stereo Structure from Motion
Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear Fundamental Matri Lecture 13 pplications Stereo Structure from Motion
Warping, Morphing and Mosaics
 Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Fundamental Matrix. Lecture 13
 Fundamental Matri Lecture 13 Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear pplications Stereo Structure from Motion
Fundamental Matri Lecture 13 Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear pplications Stereo Structure from Motion
Affine and Projective Transformations
 CS 674: Intro to Computer Vision Affine and Projective Transformations Prof. Adriana Kovaska Universit of Pittsburg October 3, 26 Alignment problem We previousl discussed ow to matc features across images,
CS 674: Intro to Computer Vision Affine and Projective Transformations Prof. Adriana Kovaska Universit of Pittsburg October 3, 26 Alignment problem We previousl discussed ow to matc features across images,
Fitting a transformation: Feature-based alignment April 30 th, Yong Jae Lee UC Davis
 Fitting a transformation: Feature-based alignment April 3 th, 25 Yong Jae Lee UC Davis Announcements PS2 out toda; due 5/5 Frida at :59 pm Color quantization with k-means Circle detection with the Hough
Fitting a transformation: Feature-based alignment April 3 th, 25 Yong Jae Lee UC Davis Announcements PS2 out toda; due 5/5 Frida at :59 pm Color quantization with k-means Circle detection with the Hough
Glossary alternate interior angles absolute value function Example alternate exterior angles Example angle of rotation Example
 Glossar A absolute value function An absolute value function is a function that can be written in the form, where is an number or epression. alternate eterior angles alternate interior angles Alternate
Glossar A absolute value function An absolute value function is a function that can be written in the form, where is an number or epression. alternate eterior angles alternate interior angles Alternate
Image Warping : Computational Photography Alexei Efros, CMU, Fall Some slides from Steve Seitz
 Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 2 Image Transformations image filtering: change range of image g() T(f())
Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 2 Image Transformations image filtering: change range of image g() T(f())
Modeling Transformations
 Modeling Transformations Michael Kazhdan (601.457/657) HB Ch. 5 FvDFH Ch. 5 Overview Ra-Tracing so far Modeling transformations Ra Tracing Image RaTrace(Camera camera, Scene scene, int width, int heigh,
Modeling Transformations Michael Kazhdan (601.457/657) HB Ch. 5 FvDFH Ch. 5 Overview Ra-Tracing so far Modeling transformations Ra Tracing Image RaTrace(Camera camera, Scene scene, int width, int heigh,
Image Warping (Szeliski Sec 2.1.2)
") Image Warping (Szeliski Sec 2..2) http://www.jeffre-martin.com CS94: Image Manipulation & Computational Photograph Aleei Efros, UC Berkele, Fall 7 Some slides from Steve Seitz Image Transformations image
Image Warping (Szeliski Sec 2..2) http://www.jeffre-martin.com CS94: Image Manipulation & Computational Photograph Aleei Efros, UC Berkele, Fall 7 Some slides from Steve Seitz Image Transformations image
Image Warping. Computational Photography Derek Hoiem, University of Illinois 09/28/17. Photo by Sean Carroll
 Image Warping 9/28/7 Man slides from Alosha Efros + Steve Seitz Computational Photograph Derek Hoiem, Universit of Illinois Photo b Sean Carroll Reminder: Proj 2 due monda Much more difficult than project
Image Warping 9/28/7 Man slides from Alosha Efros + Steve Seitz Computational Photograph Derek Hoiem, Universit of Illinois Photo b Sean Carroll Reminder: Proj 2 due monda Much more difficult than project
CS559: Computer Graphics
 CS559: Computer Graphics Lecture 8: 3D Transforms Li Zhang Spring 28 Most Slides from Stephen Chenne Finish Color space Toda 3D Transforms and Coordinate sstem Reading: Shirle ch 6 RGB and HSV Green(,,)
CS559: Computer Graphics Lecture 8: 3D Transforms Li Zhang Spring 28 Most Slides from Stephen Chenne Finish Color space Toda 3D Transforms and Coordinate sstem Reading: Shirle ch 6 RGB and HSV Green(,,)
Uses of Transformations. 2D transformations Homogeneous coordinates. Transformations. Transformations. Transformations. Transformations and matrices
 Uses of Transformations 2D transformations Homogeneous coordinates odeling: position and resie parts of a comple model; Viewing: define and position the virtual camera Animation: define how objects move/change
Uses of Transformations 2D transformations Homogeneous coordinates odeling: position and resie parts of a comple model; Viewing: define and position the virtual camera Animation: define how objects move/change
Image Warping. Many slides from Alyosha Efros + Steve Seitz. Photo by Sean Carroll
 Image Warping Man slides from Alosha Efros + Steve Seitz Photo b Sean Carroll Morphing Blend from one object to other with a series of local transformations Image Transformations image filtering: change
Image Warping Man slides from Alosha Efros + Steve Seitz Photo b Sean Carroll Morphing Blend from one object to other with a series of local transformations Image Transformations image filtering: change
Image Warping. Some slides from Steve Seitz
 Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Spring 2 Image Transformations image filtering: change range of image g() = T(f())
Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Spring 2 Image Transformations image filtering: change range of image g() = T(f())
Two Dimensional Viewing
 Two Dimensional Viewing Dr. S.M. Malaek Assistant: M. Younesi Two Dimensional Viewing Basic Interactive Programming Basic Interactive Programming User controls contents, structure, and appearance of objects
Two Dimensional Viewing Dr. S.M. Malaek Assistant: M. Younesi Two Dimensional Viewing Basic Interactive Programming Basic Interactive Programming User controls contents, structure, and appearance of objects
4. Two Dimensional Transformations
 4. Two Dimensional Transformations CS362 Introduction to Computer Graphics Helena Wong, 2 In man applications, changes in orientations, sizes, and shapes are accomplished with geometric transformations
4. Two Dimensional Transformations CS362 Introduction to Computer Graphics Helena Wong, 2 In man applications, changes in orientations, sizes, and shapes are accomplished with geometric transformations
What and Why Transformations?
 2D transformations What and Wh Transformations? What? : The geometrical changes of an object from a current state to modified state. Changing an object s position (translation), orientation (rotation)
2D transformations What and Wh Transformations? What? : The geometrical changes of an object from a current state to modified state. Changing an object s position (translation), orientation (rotation)
CMSC 425: Lecture 10 Basics of Skeletal Animation and Kinematics
 : Lecture Basics of Skeletal Animation and Kinematics Reading: Chapt of Gregor, Game Engine Architecture. The material on kinematics is a simplification of similar concepts developed in the field of robotics,
: Lecture Basics of Skeletal Animation and Kinematics Reading: Chapt of Gregor, Game Engine Architecture. The material on kinematics is a simplification of similar concepts developed in the field of robotics,
Modeling Transformations
 Modeling Transformations Michael Kazhdan (601.457/657) HB Ch. 5 FvDFH Ch. 5 Announcement Assignment 2 has been posted: Due: 10/24 ASAP: Download the code and make sure it compiles» On windows: just build
Modeling Transformations Michael Kazhdan (601.457/657) HB Ch. 5 FvDFH Ch. 5 Announcement Assignment 2 has been posted: Due: 10/24 ASAP: Download the code and make sure it compiles» On windows: just build
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Computer Graphics. Geometric Transformations
 Computer Graphics Geometric Transformations Contents coordinate sstems scalar values, points, vectors, matrices right-handed and left-handed coordinate sstems mathematical foundations transformations mathematical
Computer Graphics Geometric Transformations Contents coordinate sstems scalar values, points, vectors, matrices right-handed and left-handed coordinate sstems mathematical foundations transformations mathematical
Matrix Representations
 CONDENSED LESSON 6. Matri Representations In this lesson, ou Represent closed sstems with transition diagrams and transition matrices Use matrices to organize information Sandra works at a da-care center.
CONDENSED LESSON 6. Matri Representations In this lesson, ou Represent closed sstems with transition diagrams and transition matrices Use matrices to organize information Sandra works at a da-care center.
Computer Graphics. Si Lu. Fall er_graphics.htm 10/11/2017
 Computer Graphics Si Lu Fall 27 http://www.cs.pd.edu/~lusi/cs447/cs447_547_comput er_graphics.htm //27 Last time Filtering Resampling 2 Toda Compositing NPR 3D Graphics Toolkits Transformations 3 Demo
Computer Graphics Si Lu Fall 27 http://www.cs.pd.edu/~lusi/cs447/cs447_547_comput er_graphics.htm //27 Last time Filtering Resampling 2 Toda Compositing NPR 3D Graphics Toolkits Transformations 3 Demo
MEM380 Applied Autonomous Robots Winter Robot Kinematics
 MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
Announcements. Recognition I. Optical Flow: Where do pixels move to? dy dt. I + y. I = x. di dt. dx dt. = t
 Announcements I Introduction to Computer Vision CSE 152 Lecture 18 Assignment 4: Due Toda Assignment 5: Posted toda Read: Trucco & Verri, Chapter 10 on recognition Final Eam: Wed, 6/9/04, 11:30-2:30, WLH
Announcements I Introduction to Computer Vision CSE 152 Lecture 18 Assignment 4: Due Toda Assignment 5: Posted toda Read: Trucco & Verri, Chapter 10 on recognition Final Eam: Wed, 6/9/04, 11:30-2:30, WLH
Image Transformations
 Image Transformations Outline Gre-level transformations Histogram equalization Geometric transformations Affine transformations Interpolation Warping and morphing. Gre-level transformations Changes the
Image Transformations Outline Gre-level transformations Histogram equalization Geometric transformations Affine transformations Interpolation Warping and morphing. Gre-level transformations Changes the
Geometric Image Transformations and Related Topics
 Geometric Image Transformations and Related Topics 9 th Lesson on Image Processing Martina Mudrová 2004 Topics What will be the topic of the following lesson? Geometric image transformations Interpolation
Geometric Image Transformations and Related Topics 9 th Lesson on Image Processing Martina Mudrová 2004 Topics What will be the topic of the following lesson? Geometric image transformations Interpolation
3D Geometry and Camera Calibration
 3D Geometr and Camera Calibration 3D Coordinate Sstems Right-handed vs. left-handed 2D Coordinate Sstems ais up vs. ais down Origin at center vs. corner Will often write (u, v) for image coordinates v
3D Geometr and Camera Calibration 3D Coordinate Sstems Right-handed vs. left-handed 2D Coordinate Sstems ais up vs. ais down Origin at center vs. corner Will often write (u, v) for image coordinates v
Computer Graphics. Geometric Transformations
 Contents coordinate sstems scalar values, points, vectors, matrices right-handed and left-handed coordinate sstems mathematical foundations transformations mathematical descriptions of geometric changes,
Contents coordinate sstems scalar values, points, vectors, matrices right-handed and left-handed coordinate sstems mathematical foundations transformations mathematical descriptions of geometric changes,
Image Warping. Some slides from Steve Seitz
 Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 26 Image Warping image filtering: change range of image g() T(f()) f T f image
Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 26 Image Warping image filtering: change range of image g() T(f()) f T f image
CSE328 Fundamentals of Computer Graphics: Theory, Algorithms, and Applications
 CSE328 Fundamentals of Computer Graphics: Theor, Algorithms, and Applications Hong in State Universit of New York at Ston Brook (Ston Brook Universit) Ston Brook, New York 794-44 Tel: (63)632-845; Fa:
CSE328 Fundamentals of Computer Graphics: Theor, Algorithms, and Applications Hong in State Universit of New York at Ston Brook (Ston Brook Universit) Ston Brook, New York 794-44 Tel: (63)632-845; Fa:
Image warping/morphing
 Image warping/morphing Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/20 with slides b Richard Szeliski, Steve Seitz, Tom Funkhouser and Aleei Efros Image warping Image formation B A Sampling
Image warping/morphing Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/20 with slides b Richard Szeliski, Steve Seitz, Tom Funkhouser and Aleei Efros Image warping Image formation B A Sampling
Linear Algebra and Image Processing: Additional Theory regarding Computer Graphics and Image Processing not covered by David C.
 Linear Algebra and Image Processing: Additional Theor regarding Computer Graphics and Image Processing not covered b David C. La Dr. D.P. Huijsmans LIACS, Leiden Universit Februar 202 Differences in conventions
Linear Algebra and Image Processing: Additional Theor regarding Computer Graphics and Image Processing not covered b David C. La Dr. D.P. Huijsmans LIACS, Leiden Universit Februar 202 Differences in conventions
[ ] [ ] Orthogonal Transformation of Cartesian Coordinates in 2D & 3D. φ = cos 1 1/ φ = tan 1 [ 2 /1]
![[ ] [ ] Orthogonal Transformation of Cartesian Coordinates in 2D & 3D. φ = cos 1 1/ φ = tan 1 [ 2 /1]](/thumbs/84/89383711.jpg "[ ] [ ] Orthogonal Transformation of Cartesian Coordinates in 2D & 3D. φ = cos 1 1/ φ = tan 1 [ 2 /1]") Orthogonal Transformation of Cartesian Coordinates in 2D & 3D A vector is specified b its coordinates, so it is defined relative to a reference frame. The same vector will have different coordinates in
Orthogonal Transformation of Cartesian Coordinates in 2D & 3D A vector is specified b its coordinates, so it is defined relative to a reference frame. The same vector will have different coordinates in
CS770/870 Spring 2017 Transformations
 CS770/870 Spring 2017 Transformations Coordinate sstems 2D Transformations Homogeneous coordinates Matrices, vectors, points Coordinate Sstems Coordinate sstems used in graphics Screen coordinates: the
CS770/870 Spring 2017 Transformations Coordinate sstems 2D Transformations Homogeneous coordinates Matrices, vectors, points Coordinate Sstems Coordinate sstems used in graphics Screen coordinates: the
Limitations of Thresholding
 Limitations of Thresholding Wh can we segment images much better b ee than through thresholding processes? We might improve results b considering image contet: Surface Coherence Gradient.illusion.arp.jpg
Limitations of Thresholding Wh can we segment images much better b ee than through thresholding processes? We might improve results b considering image contet: Surface Coherence Gradient.illusion.arp.jpg
Image Warping, mesh, and triangulation CSE399b, Spring 07 Computer Vision
 http://grail.cs.washington.edu/projects/rotoscoping/ Image Warping, mesh, and triangulation CSE399b, Spring 7 Computer Vision Man of the slides from A. Efros. Parametric (global) warping Eamples of parametric
http://grail.cs.washington.edu/projects/rotoscoping/ Image Warping, mesh, and triangulation CSE399b, Spring 7 Computer Vision Man of the slides from A. Efros. Parametric (global) warping Eamples of parametric
3D Photography: Epipolar geometry
 3D Photograph: Epipolar geometr Kalin Kolev, Marc Pollefes Spring 203 http://cvg.ethz.ch/teaching/203spring/3dphoto/ Schedule (tentative) Feb 8 Feb 25 Mar 4 Mar Mar 8 Mar 25 Apr Apr 8 Apr 5 Apr 22 Apr
3D Photograph: Epipolar geometr Kalin Kolev, Marc Pollefes Spring 203 http://cvg.ethz.ch/teaching/203spring/3dphoto/ Schedule (tentative) Feb 8 Feb 25 Mar 4 Mar Mar 8 Mar 25 Apr Apr 8 Apr 5 Apr 22 Apr
EECS 556 Image Processing W 09
 EECS 556 Image Processing W 09 Motion estimation Global vs. Local Motion Block Motion Estimation Optical Flow Estimation (normal equation) Man slides of this lecture are courtes of prof Milanfar (UCSC)
EECS 556 Image Processing W 09 Motion estimation Global vs. Local Motion Block Motion Estimation Optical Flow Estimation (normal equation) Man slides of this lecture are courtes of prof Milanfar (UCSC)
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration
 MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
Fundamentals of Linear Algebra, Part II
 -7/8-797 Machine Learning for Signal Processing Fundamentals of Linear Algebra, Part II Class 3 August 9 Instructor: Bhiksha Raj Administrivia Registration: Anone on waitlist still? We have a second TA
-7/8-797 Machine Learning for Signal Processing Fundamentals of Linear Algebra, Part II Class 3 August 9 Instructor: Bhiksha Raj Administrivia Registration: Anone on waitlist still? We have a second TA
Motivation. Intensity Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Computer Vision Lecture 20
 Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
Today s class. Geometric objects and transformations. Informationsteknologi. Wednesday, November 7, 2007 Computer Graphics - Class 5 1
 Toda s class Geometric objects and transformations Wednesda, November 7, 27 Computer Graphics - Class 5 Vector operations Review of vector operations needed for working in computer graphics adding two
Toda s class Geometric objects and transformations Wednesda, November 7, 27 Computer Graphics - Class 5 Vector operations Review of vector operations needed for working in computer graphics adding two
Image warping. image filtering: change range of image. image warping: change domain of image g(x) = f(h(x)) h(y)=0.5y+0.5. h([x,y])=[x,y/2] f h
![Image warping. image filtering: change range of image. image warping: change domain of image g(x) = f(h(x)) h(y)=0.5y+0.5. h([x,y])=[x,y/2] f h](/thumbs/71/65976347.jpg "Image warping. image filtering: change range of image. image warping: change domain of image g(x) = f(h(x)) h(y)=0.5y+0.5. h([x,y])=[x,y/2] f h") Image warping Image warping image filtering: change range of image g() () = h(f()) h(f()) f h g h()=0.5+0.5 image warping: change domain of image g() = f(h()) f h g h([,])=[,/2] Parametric (global) warping
Image warping Image warping image filtering: change range of image g() () = h(f()) h(f()) f h g h()=0.5+0.5 image warping: change domain of image g() = f(h()) f h g h([,])=[,/2] Parametric (global) warping
Intermediate Algebra. Gregg Waterman Oregon Institute of Technology
 Intermediate Algebra Gregg Waterman Oregon Institute of Technolog c 2017 Gregg Waterman This work is licensed under the Creative Commons Attribution 4.0 International license. The essence of the license
Intermediate Algebra Gregg Waterman Oregon Institute of Technolog c 2017 Gregg Waterman This work is licensed under the Creative Commons Attribution 4.0 International license. The essence of the license
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 8: Geometric transformations Szeliski: Chapter 3.6 Reading Announcements Project 2 out today, due Oct. 4 (demo at end of class today) Image alignment Why don
CS467: Computer Vision Noah Snavely Lecture 8: Geometric transformations Szeliski: Chapter 3.6 Reading Announcements Project 2 out today, due Oct. 4 (demo at end of class today) Image alignment Why don
Scene Graphs & Modeling Transformations COS 426
 Scene Graphs & Modeling Transformations COS 426 3D Object Representations Points Range image Point cloud Surfaces Polgonal mesh Subdivision Parametric Implicit Solids Voels BSP tree CSG Sweep High-level
Scene Graphs & Modeling Transformations COS 426 3D Object Representations Points Range image Point cloud Surfaces Polgonal mesh Subdivision Parametric Implicit Solids Voels BSP tree CSG Sweep High-level
GLOBAL EDITION. Interactive Computer Graphics. A Top-Down Approach with WebGL SEVENTH EDITION. Edward Angel Dave Shreiner
 GLOBAL EDITION Interactive Computer Graphics A Top-Down Approach with WebGL SEVENTH EDITION Edward Angel Dave Shreiner This page is intentionall left blank. 4.10 Concatenation of Transformations 219 in
GLOBAL EDITION Interactive Computer Graphics A Top-Down Approach with WebGL SEVENTH EDITION Edward Angel Dave Shreiner This page is intentionall left blank. 4.10 Concatenation of Transformations 219 in
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Projections. Brian Curless CSE 457 Spring Reading. Shrinking the pinhole. The pinhole camera. Required:
 Reading Required: Projections Brian Curless CSE 457 Spring 2013 Angel, 5.1-5.6 Further reading: Fole, et al, Chapter 5.6 and Chapter 6 David F. Rogers and J. Alan Adams, Mathematical Elements for Computer
Reading Required: Projections Brian Curless CSE 457 Spring 2013 Angel, 5.1-5.6 Further reading: Fole, et al, Chapter 5.6 and Chapter 6 David F. Rogers and J. Alan Adams, Mathematical Elements for Computer
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
SECTION 3-4 Rational Functions
 20 3 Polnomial and Rational Functions 0. Shipping. A shipping bo is reinforced with steel bands in all three directions (see the figure). A total of 20. feet of steel tape is to be used, with 6 inches
20 3 Polnomial and Rational Functions 0. Shipping. A shipping bo is reinforced with steel bands in all three directions (see the figure). A total of 20. feet of steel tape is to be used, with 6 inches
Stereo Matching! Christian Unger 1,2, Nassir Navab 1!! Computer Aided Medical Procedures (CAMP), Technische Universität München, Germany!!
, Technische Universität München, Germany!!") Stereo Matching Christian Unger 12 Nassir Navab 1 1 Computer Aided Medical Procedures CAMP) Technische Universität München German 2 BMW Group München German Hardware Architectures. Microprocessors Pros:
Stereo Matching Christian Unger 12 Nassir Navab 1 1 Computer Aided Medical Procedures CAMP) Technische Universität München German 2 BMW Group München German Hardware Architectures. Microprocessors Pros:
6.867 Machine learning
 6.867 Machine learning Final eam December 3, 24 Your name and MIT ID: J. D. (Optional) The grade ou would give to ourself + a brief justification. A... wh not? Problem 5 4.5 4 3.5 3 2.5 2.5 + () + (2)
6.867 Machine learning Final eam December 3, 24 Your name and MIT ID: J. D. (Optional) The grade ou would give to ourself + a brief justification. A... wh not? Problem 5 4.5 4 3.5 3 2.5 2.5 + () + (2)
Prof. Feng Liu. Winter /05/2019
 Prof. Feng Liu Winter 2019 http://www.cs.pd.edu/~fliu/courses/cs410/ 02/05/2019 Last Time Image alignment 2 Toda Image warping The slides for this topic are used from Prof. Yung-Yu Chuang, which use materials
Prof. Feng Liu Winter 2019 http://www.cs.pd.edu/~fliu/courses/cs410/ 02/05/2019 Last Time Image alignment 2 Toda Image warping The slides for this topic are used from Prof. Yung-Yu Chuang, which use materials
Modeling with CMU Mini-FEA Program
 Modeling with CMU Mini-FEA Program Introduction Finite element analsis (FEA) allows ou analze the stresses and displacements in a bod when forces are applied. FEA determines the stresses and displacements
Modeling with CMU Mini-FEA Program Introduction Finite element analsis (FEA) allows ou analze the stresses and displacements in a bod when forces are applied. FEA determines the stresses and displacements
H Geo Final Review Packet Multiple Choice Identify the choice that best completes the statement or answers the question.
 H Geo Final Review Packet Multiple Choice Identif the choice that best completes the statement or answers the question. 1. Which angle measures approximatel 7?.. In the figure below, what is the name of
H Geo Final Review Packet Multiple Choice Identif the choice that best completes the statement or answers the question. 1. Which angle measures approximatel 7?.. In the figure below, what is the name of
Systems of Linear Equations
 Sstems of Linear Equations Gaussian Elimination Tpes of Solutions A linear equation is an equation that can be written in the form: a a a n n b The coefficients a i and the constant b can be real or comple
Sstems of Linear Equations Gaussian Elimination Tpes of Solutions A linear equation is an equation that can be written in the form: a a a n n b The coefficients a i and the constant b can be real or comple
20 Calculus and Structures
 0 Calculus and Structures CHAPTER FUNCTIONS Calculus and Structures Copright LESSON FUNCTIONS. FUNCTIONS A function f is a relationship between an input and an output and a set of instructions as to how
0 Calculus and Structures CHAPTER FUNCTIONS Calculus and Structures Copright LESSON FUNCTIONS. FUNCTIONS A function f is a relationship between an input and an output and a set of instructions as to how
Optical flow. Cordelia Schmid
 Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Chap 7, 2009 Spring Yeong Gil Shin
 Three-Dimensional i Viewingi Chap 7, 29 Spring Yeong Gil Shin Viewing i Pipeline H d fi i d? How to define a window? How to project onto the window? Rendering "Create a picture (in a snthetic camera) Specification
Three-Dimensional i Viewingi Chap 7, 29 Spring Yeong Gil Shin Viewing i Pipeline H d fi i d? How to define a window? How to project onto the window? Rendering "Create a picture (in a snthetic camera) Specification
Chapter 3 : Computer Animation
 Chapter 3 : Computer Animation Histor First animation films (Disne) 30 drawings / second animator in chief : ke frames others : secondar drawings Use the computer to interpolate? positions orientations
Chapter 3 : Computer Animation Histor First animation films (Disne) 30 drawings / second animator in chief : ke frames others : secondar drawings Use the computer to interpolate? positions orientations
Medical Image Registration by Maximization of Mutual Information
 Medical Image Registration by Maximization of Mutual Information EE 591 Introduction to Information Theory Instructor Dr. Donald Adjeroh Submitted by Senthil.P.Ramamurthy Damodaraswamy, Umamaheswari Introduction
Medical Image Registration by Maximization of Mutual Information EE 591 Introduction to Information Theory Instructor Dr. Donald Adjeroh Submitted by Senthil.P.Ramamurthy Damodaraswamy, Umamaheswari Introduction
2.3 Polynomial Functions of Higher Degree with Modeling
 SECTION 2.3 Polnomial Functions of Higher Degree with Modeling 185 2.3 Polnomial Functions of Higher Degree with Modeling What ou ll learn about Graphs of Polnomial Functions End Behavior of Polnomial
SECTION 2.3 Polnomial Functions of Higher Degree with Modeling 185 2.3 Polnomial Functions of Higher Degree with Modeling What ou ll learn about Graphs of Polnomial Functions End Behavior of Polnomial
A rigid body free to move in a reference frame will, in the general case, have complex motion, which is simultaneously a combination of rotation and
 050389 - Analtical Elements of Mechanisms Introduction. Degrees of Freedom he number of degrees of freedom (DOF) of a sstem is equal to the number of independent parameters (measurements) that are needed
050389 - Analtical Elements of Mechanisms Introduction. Degrees of Freedom he number of degrees of freedom (DOF) of a sstem is equal to the number of independent parameters (measurements) that are needed
LESSON 3.1 INTRODUCTION TO GRAPHING
 LESSON 3.1 INTRODUCTION TO GRAPHING LESSON 3.1 INTRODUCTION TO GRAPHING 137 OVERVIEW Here s what ou ll learn in this lesson: Plotting Points a. The -plane b. The -ais and -ais c. The origin d. Ordered
LESSON 3.1 INTRODUCTION TO GRAPHING LESSON 3.1 INTRODUCTION TO GRAPHING 137 OVERVIEW Here s what ou ll learn in this lesson: Plotting Points a. The -plane b. The -ais and -ais c. The origin d. Ordered
Grid and Mesh Generation. Introduction to its Concepts and Methods
 Grid and Mesh Generation Introduction to its Concepts and Methods Elements in a CFD software sstem Introduction What is a grid? The arrangement of the discrete points throughout the flow field is simpl
Grid and Mesh Generation Introduction to its Concepts and Methods Elements in a CFD software sstem Introduction What is a grid? The arrangement of the discrete points throughout the flow field is simpl
Nonparametric Multiscale Multimodal Models for Detection/Recognition John Fisher & John Reif Eagle Eye Software (919)
") Rochester Y 05-07 October 999 onparametric Multiscale Multimodal Models for Detection/Recognition John Fisher & John Reif Eagle Ee Software (99) 493-7978 reif@cs.duke.edu Multiscale Multimodal Models for
Rochester Y 05-07 October 999 onparametric Multiscale Multimodal Models for Detection/Recognition John Fisher & John Reif Eagle Ee Software (99) 493-7978 reif@cs.duke.edu Multiscale Multimodal Models for
y = f(x) x (x, f(x)) f(x) g(x) = f(x) + 2 (x, g(x)) 0 (0, 1) 1 3 (0, 3) 2 (2, 3) 3 5 (2, 5) 4 (4, 3) 3 5 (4, 5) 5 (5, 5) 5 7 (5, 7)
 x (x, f(x)) f(x) g(x) = f(x) + 2 (x, g(x)) 0 (0, 1) 1 3 (0, 3) 2 (2, 3) 3 5 (2, 5) 4 (4, 3) 3 5 (4, 5) 5 (5, 5) 5 7 (5, 7)") 0 Relations and Functions.7 Transformations In this section, we stud how the graphs of functions change, or transform, when certain specialized modifications are made to their formulas. The transformations
0 Relations and Functions.7 Transformations In this section, we stud how the graphs of functions change, or transform, when certain specialized modifications are made to their formulas. The transformations
Robert Collins CSE598G. Intro to Template Matching and the Lucas-Kanade Method
 Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Computing F class 13. Multiple View Geometry. Comp Marc Pollefeys
 Computing F class 3 Multiple View Geometr Comp 90-089 Marc Pollefes Multiple View Geometr course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective D Geometr Jan. 4, 6 (no class) Projective
Computing F class 3 Multiple View Geometr Comp 90-089 Marc Pollefes Multiple View Geometr course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective D Geometr Jan. 4, 6 (no class) Projective
2.4 Polynomial and Rational Functions
 Polnomial Functions Given a linear function f() = m + b, we can add a square term, and get a quadratic function g() = a 2 + f() = a 2 + m + b. We can continue adding terms of higher degrees, e.g. we can
Polnomial Functions Given a linear function f() = m + b, we can add a square term, and get a quadratic function g() = a 2 + f() = a 2 + m + b. We can continue adding terms of higher degrees, e.g. we can
6.867 Machine learning
 6.867 Machine learning Final eam December 3, 24 Your name and MIT ID: J. D. (Optional) The grade ou would give to ourself + a brief justification. A... wh not? Cite as: Tommi Jaakkola, course materials
6.867 Machine learning Final eam December 3, 24 Your name and MIT ID: J. D. (Optional) The grade ou would give to ourself + a brief justification. A... wh not? Cite as: Tommi Jaakkola, course materials
5.2 Graphing Polynomial Functions
 Locker LESSON 5. Graphing Polnomial Functions Common Core Math Standards The student is epected to: F.IF.7c Graph polnomial functions, identifing zeros when suitable factorizations are available, and showing
Locker LESSON 5. Graphing Polnomial Functions Common Core Math Standards The student is epected to: F.IF.7c Graph polnomial functions, identifing zeros when suitable factorizations are available, and showing
Stereo: the graph cut method
 Stereo: the graph cut method Last lecture we looked at a simple version of the Marr-Poggio algorithm for solving the binocular correspondence problem along epipolar lines in rectified images. The main
Stereo: the graph cut method Last lecture we looked at a simple version of the Marr-Poggio algorithm for solving the binocular correspondence problem along epipolar lines in rectified images. The main
Motivation. Gray Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Investigation Free Fall
 Investigation Free Fall Name Period Date You will need: a motion sensor, a small pillow or other soft object What function models the height of an object falling due to the force of gravit? Use a motion
Investigation Free Fall Name Period Date You will need: a motion sensor, a small pillow or other soft object What function models the height of an object falling due to the force of gravit? Use a motion
Vector Algebra Transformations. Lecture 4
 Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture 4 2008 Steve Marschner 1 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures
Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture 4 2008 Steve Marschner 1 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures
 9 CARTESIAN SYSTEM OF COORDINATES You must have searched for our seat in a cinema hall, a stadium, or a train. For eample, seat H-4 means the fourth seat in the H th row. In other words, H and 4 are the
9 CARTESIAN SYSTEM OF COORDINATES You must have searched for our seat in a cinema hall, a stadium, or a train. For eample, seat H-4 means the fourth seat in the H th row. In other words, H and 4 are the
Geometric Transformations
 CS INTRODUCTION TO COMPUTER GRAPHICS Geometric Transformations D and D Andries an Dam 9/9/7 /46 CS INTRODUCTION TO COMPUTER GRAPHICS How do we use Geometric Transformations? (/) Objects in a scene at the
CS INTRODUCTION TO COMPUTER GRAPHICS Geometric Transformations D and D Andries an Dam 9/9/7 /46 CS INTRODUCTION TO COMPUTER GRAPHICS How do we use Geometric Transformations? (/) Objects in a scene at the
Epipolar Constraint. Epipolar Lines. Epipolar Geometry. Another look (with math).
.") Epipolar Constraint Epipolar Lines Potential 3d points Red point - fied => Blue point lies on a line There are 3 degrees of freedom in the position of a point in space; there are four DOF for image points
Epipolar Constraint Epipolar Lines Potential 3d points Red point - fied => Blue point lies on a line There are 3 degrees of freedom in the position of a point in space; there are four DOF for image points
Geometric Model of Camera
 Geometric Model of Camera Dr. Gerhard Roth COMP 42A Winter 25 Version 2 Similar Triangles 2 Geometric Model of Camera Perspective projection P(X,Y,Z) p(,) f X Z f Y Z 3 Parallel lines aren t 4 Figure b
Geometric Model of Camera Dr. Gerhard Roth COMP 42A Winter 25 Version 2 Similar Triangles 2 Geometric Model of Camera Perspective projection P(X,Y,Z) p(,) f X Z f Y Z 3 Parallel lines aren t 4 Figure b
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in