3D Object Recognition using Multiclass SVM-KNN
|
|
|
- Cameron Gibbs
- 5 years ago
- Views:
Transcription
1 3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury
2 Problem We address the problem of recognizing 3D objects based on various views. The objective is to identify a 3D object based on its 2D image taken from any given angle. The 3D object recognition has been a prominent research area for last two decades. Recently view-based 3D object recognition has attracted many researchers in the community of machine learning.
3 Outline 1. Image database used for 3D object recognition. 2. Machine Learning algorithms: Multiclass SVMs K-Nearest Neighbor Algorithm (KNN) SVM-KNN 3. Proposed SVM-KNN based 3D object recognition. 4. Some local and global image features. 5. Experimental results for the proposed method in comparison with other methods.
4 Image Database The COIL (Columbia Object Image Library) database consists of 7,200 images (100 objects, 72 views per object). Each image is a color image of size Objects positioned on a motorized turntable against black background are observed from fixed viewpoint. For each object, the turntable was rotated 5 per image. Images were normalized to size to save disk storage.



")
 View:")

5 Image Database Figure : Objects from COIL database (a) View: 0 (b) View: 45 (c) View: 300 (d) View: 0 (e) View: 45 (f) View: 300
6 Multi-class SVM Many real-world problems deal with more than two classes. Multiclass problems involve reformulating them as a number of binary classification problems, and solving these with binary SVMs. Two methods to implement a multiclass SVM: one-against-one and one-against-all.
7 Multi-class SVM 1. One-against-one: One binary SVM for each pair of classes (N(N 1)/2 SVMs).

8 Multi-class SVM 2. One-against-all: One binary SVM for each class to separate from the rest (N SVMs).
9 K-Nearest Neighbor Algorithm (KNN) Figure : K-nearest neighbors
10 K-Nearest Neighbor Algorithm (KNN) KNN classifies a point based on its k closest neighbors. Find the k closest points and choose a label based on majority of its neighbors. If k = 1, then the object is simply assigned to class of its nearest neighbor. Larger value of k reduce the effect of noise on the classification.
11 SVM-KNN KNN suffers from the problem of high variance in the case of limited sampling. With SVMs, training on a whole dataset can be slow and may not work very well when the number of classes is large. Zhang et al. (2006) proposed SVM-KNN as a classifier for visual category recognition. SVM-KNN can be applied to large multiclass data sets for which it outperforms KNN and SVMs, and remains efficient.
12 SVM-KNN For a query, 1. choose a proper distance function d(x, y) for the problem. Typically, d is the Euclidean distance function in problems of object recognition. 2. compute distances of the query to all training examples and pick the nearest k neighbors. 3. if k neighbors have all the same labels, the query is labeled and exit; otherwise, compute the pairwise distances between the k neighbors and store in a matrix. 4. convert the distance matrix to a kernel matrix and apply multi-class SVM. A Gaussian function K(x, y) = exp( d(x, y)/σ 2 ) can be used as the kernel. 5. use the resulting classifier to label the query.
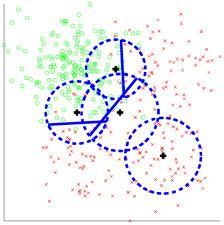
13 SVM-KNN
14 SVM-KNN based 3D Object Recognition
15 Canny Edge Detection For an image f (x, y): 1. Compute x (f G) and y (f G) at every point, where G(x, y) is the Gaussian function with parameter σ. f x = x (f G) = f x G, f y = y (f G) = f y G. 2. Compute magnitude of the gradient: M(x, y) = f 2 x + f 2 y. 3. Find local maxima of M(x, y). 4. Apply thresholding/edge linking.

 edges")
16 Canny Edge Detection (a) Original (b) edges detected
17 Local Image Features: Hessian-Laplace Detector The local features are extracted on a small image window around pixel. Corners and blobs on an image can be detected by Hessian-Laplace detector. The Hessian of an image f (x, y): Hf (x, y) = [ ] fxx (x, y) f xy (x, y). f yx (x, y) f yy (x, y) The detector chooses points on the image where det(hf ) reaches a local maximum. Such points are translation, scale, and rotation invariant.
18 Local Image Features: SIFT Scale-invariant Feature Transform (SIFT) is a local feature extraction method (David Lowe, 2004). Generally SIFT has a high dimension of 128 features, but Principal Component Analysis (PCA) can be utilized to reduce the number of features. Choose an interesting point using the Hessian-Laplace detector and then apply PCA-SIFT on this point.
19 Local Image Features: SIFT
20 Global Image Feature: Geometric Moments For a M N image f (x, y), the (p + q) th order moment is m p,q = M 1 N 1 y=0 x=0 The central moment: µ p,q = M 1 N 1 y=0 x=0 x p y q f (x, y), p, q = 0, 1, 2,. (x x) p (y y) q f (x, y), p, q = 0, 1, 2,, where x = m 1,0 /m 0,0 and y = m 0,1 /m 0,0.
21 Global Image Feature: Geometric Moments Normalized moments: η p,q = µ p,q µ γ, γ = p + q ,0 2 Hu s Geometric Moments: seven values using the normalized moments up to order three. Translation, scale, rotation invariant. First three of Hu s geometric moments: M 1 = η 2,0 + η 0,2 M 2 = (η 2,0 η 0,2 ) 2 + 4η 2 1,1 M 3 = (η 3,0 3η 1,2 ) 2 + (3η 2,1 η 0,3 ) 2.
22 Feature Vector Construction The following steps are taken to extract a feature vector from the images of a given object: 1. Preprocess: convert the color images to greyscale and resize to ; apply edge detection on the images and extract the following features. 2. Local features: extract 36 PCA-SIFT descriptors from a point detected by Hessian-Laplace detector. 3. Global features: Hu s seven geometric moments. 4. All 43 features are stored in a vector. These vectors are used to train the SVM.

23 Feature Vector Construction Figure : Feature Extraction.
24 Training Phase Images of objects are given as input to the system. Preprocess the images. Extract local and global features. Constructed feature vector is stored with object label. Train the SVM.
25 Testing Phase Input: image of an object. Preprocess and construct a feature vector as in the training phase. Find k closest feature vectors from the training set. Use multiclass SVM for classification.
26 Experimentation To experiment the proposed method, the COIL image database was used. 100 objects were selected for object recognition. For training set, 10 different views per object. (size of the training set = 1000). For test set, 10 alternate views of the same objects were chosen. For comparision, SVM, KNN, and BPN were experimented using the same training and test set.
27 Results
28 Results
29 Conclusion Combining local and global feature provides better results. SVM-KNN classifier has greater accuracy than the traditional methods (SVM, KNN, BPN). Future work will include the process of increasing the efficiency by adding more features.
30 Bibliography R. Muralidharan, C. Chandrasekar 3D Object Recognition using Multiclass Support Vector Machine-K-Nearest Neighbor Supported by Local and Global Feature H. Zhang, A.C. Berg, M. Maire, and J. Malik. SVM-KNN: Discriminative Nearest Neighbor Classification for Visual Category Recognition D. Lowe. Distinctive Image Features from Scale-invariant Keypoints M. Hu. Visual Pattern Recognition by Moment Invariants
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Implementing the Scale Invariant Feature Transform(SIFT) Method
 Method") Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
A Comparison of SIFT and SURF
 A Comparison of SIFT and SURF P M Panchal 1, S R Panchal 2, S K Shah 3 PG Student, Department of Electronics & Communication Engineering, SVIT, Vasad-388306, India 1 Research Scholar, Department of Electronics
A Comparison of SIFT and SURF P M Panchal 1, S R Panchal 2, S K Shah 3 PG Student, Department of Electronics & Communication Engineering, SVIT, Vasad-388306, India 1 Research Scholar, Department of Electronics
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
SVM-KNN : Discriminative Nearest Neighbor Classification for Visual Category Recognition
 SVM-KNN : Discriminative Nearest Neighbor Classification for Visual Category Recognition Hao Zhang, Alexander Berg, Michael Maire Jitendra Malik EECS, UC Berkeley Presented by Adam Bickett Objective Visual
SVM-KNN : Discriminative Nearest Neighbor Classification for Visual Category Recognition Hao Zhang, Alexander Berg, Michael Maire Jitendra Malik EECS, UC Berkeley Presented by Adam Bickett Objective Visual
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Learning to Recognize Faces in Realistic Conditions
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
SIFT: Scale Invariant Feature Transform
 1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
3D Object Recognition using Multiclass Support Vector Machine-K-Nearest Neighbor Supported by Local and Global Feature
 Journal of Computer Science 8 (8): 1380-1388, 01 ISSN 1549-3636 01 Science Publications 3D Object Recognition using Multiclass Support Vector Machine-K-Nearest Neighbor Supported by Local and Global Feature
Journal of Computer Science 8 (8): 1380-1388, 01 ISSN 1549-3636 01 Science Publications 3D Object Recognition using Multiclass Support Vector Machine-K-Nearest Neighbor Supported by Local and Global Feature
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching
 Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Line, edge, blob and corner detection
 Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Scale Invariant Feature Transform by David Lowe
 Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Edge Histogram Descriptor, Geometric Moment and Sobel Edge Detector Combined Features Based Object Recognition and Retrieval System
 Edge Histogram Descriptor, Geometric Moment and Sobel Edge Detector Combined Features Based Object Recognition and Retrieval System Neetesh Prajapati M. Tech Scholar VNS college,bhopal Amit Kumar Nandanwar
Edge Histogram Descriptor, Geometric Moment and Sobel Edge Detector Combined Features Based Object Recognition and Retrieval System Neetesh Prajapati M. Tech Scholar VNS college,bhopal Amit Kumar Nandanwar
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Object Recognition Using K-Nearest Neighbor Supported By Eigen Value Generated From the Features of an Image
 ISSN(Online): 30-9801 ISSN (Print): 30-9798 (An ISO 397: 007 Certified Organization) Vol., Issue 8, August 014 Object Recognition Using K-Nearest Neighbor Supported By Eigen Value Generated From the Features
ISSN(Online): 30-9801 ISSN (Print): 30-9798 (An ISO 397: 007 Certified Organization) Vol., Issue 8, August 014 Object Recognition Using K-Nearest Neighbor Supported By Eigen Value Generated From the Features
Shape Context Matching For Efficient OCR
 Matching For Efficient OCR May 14, 2012 Matching For Efficient OCR Table of contents 1 Motivation Background 2 What is a? Matching s Simliarity Measure 3 Matching s via Pyramid Matching Matching For Efficient
Matching For Efficient OCR May 14, 2012 Matching For Efficient OCR Table of contents 1 Motivation Background 2 What is a? Matching s Simliarity Measure 3 Matching s via Pyramid Matching Matching For Efficient
3D Reconstruction From Multiple Views Based on Scale-Invariant Feature Transform. Wenqi Zhu
 3D Reconstruction From Multiple Views Based on Scale-Invariant Feature Transform Wenqi Zhu wenqizhu@buffalo.edu Problem Statement! 3D reconstruction 3D reconstruction is a problem of recovering depth information
3D Reconstruction From Multiple Views Based on Scale-Invariant Feature Transform Wenqi Zhu wenqizhu@buffalo.edu Problem Statement! 3D reconstruction 3D reconstruction is a problem of recovering depth information
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Recognition: Face Recognition. Linda Shapiro EE/CSE 576
 Recognition: Face Recognition Linda Shapiro EE/CSE 576 1 Face recognition: once you ve detected and cropped a face, try to recognize it Detection Recognition Sally 2 Face recognition: overview Typical
Recognition: Face Recognition Linda Shapiro EE/CSE 576 1 Face recognition: once you ve detected and cropped a face, try to recognize it Detection Recognition Sally 2 Face recognition: overview Typical
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
Feature-based methods for image matching
 Feature-based methods for image matching Bag of Visual Words approach Feature descriptors SIFT descriptor SURF descriptor Geometric consistency check Vocabulary tree Digital Image Processing: Bernd Girod,
Feature-based methods for image matching Bag of Visual Words approach Feature descriptors SIFT descriptor SURF descriptor Geometric consistency check Vocabulary tree Digital Image Processing: Bernd Girod,
Image features. Image Features
 Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Object Detection by Point Feature Matching using Matlab
 Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
II. PROPOSED FACE RECOGNITION SYSTEM
 Improved Face Recognition Technique using Sift Mr. Amit Kr. Gautam, Ms. Twisha 1 (Assistant Professor, Cluster Innovation Centre,University Of Delhi, India) 2 (Assistant Professor,Cluster Innovation Centre,University
Improved Face Recognition Technique using Sift Mr. Amit Kr. Gautam, Ms. Twisha 1 (Assistant Professor, Cluster Innovation Centre,University Of Delhi, India) 2 (Assistant Professor,Cluster Innovation Centre,University
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Ulas Bagci
 CAP5415- Computer Vision Lecture 5 and 6- Finding Features, Affine Invariance, SIFT Ulas Bagci bagci@ucf.edu 1 Outline Concept of Scale Pyramids Scale- space approaches briefly Scale invariant region selecqon
CAP5415- Computer Vision Lecture 5 and 6- Finding Features, Affine Invariance, SIFT Ulas Bagci bagci@ucf.edu 1 Outline Concept of Scale Pyramids Scale- space approaches briefly Scale invariant region selecqon
Metric Learning for Large-Scale Image Classification:
 Metric Learning for Large-Scale Image Classification: Generalizing to New Classes at Near-Zero Cost Florent Perronnin 1 work published at ECCV 2012 with: Thomas Mensink 1,2 Jakob Verbeek 2 Gabriela Csurka
Metric Learning for Large-Scale Image Classification: Generalizing to New Classes at Near-Zero Cost Florent Perronnin 1 work published at ECCV 2012 with: Thomas Mensink 1,2 Jakob Verbeek 2 Gabriela Csurka
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
MORPHOLOGICAL BOUNDARY BASED SHAPE REPRESENTATION SCHEMES ON MOMENT INVARIANTS FOR CLASSIFICATION OF TEXTURES
 International Journal of Computer Science and Communication Vol. 3, No. 1, January-June 2012, pp. 125-130 MORPHOLOGICAL BOUNDARY BASED SHAPE REPRESENTATION SCHEMES ON MOMENT INVARIANTS FOR CLASSIFICATION
International Journal of Computer Science and Communication Vol. 3, No. 1, January-June 2012, pp. 125-130 MORPHOLOGICAL BOUNDARY BASED SHAPE REPRESENTATION SCHEMES ON MOMENT INVARIANTS FOR CLASSIFICATION
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
CS 556: Computer Vision. Lecture 3
 CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Outline Matlab Image features -- Interest points Point descriptors Homework 1 2 Basic MATLAB Commands 3 Basic MATLAB
CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Outline Matlab Image features -- Interest points Point descriptors Homework 1 2 Basic MATLAB Commands 3 Basic MATLAB
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
CS231A Section 6: Problem Set 3
 CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
Object Classification Problem
 HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Problem Session #6. EE368/CS232 Digital Image Processing
 Problem Session #6 EE368/CS232 Digital Image Processing . Robustness of Harris Keypoints to Rotation and Scaling Part A: Apply a Harris corner detector and threshold the cornerness response so that about
Problem Session #6 EE368/CS232 Digital Image Processing . Robustness of Harris Keypoints to Rotation and Scaling Part A: Apply a Harris corner detector and threshold the cornerness response so that about
Metric Learning for Large Scale Image Classification:
 Metric Learning for Large Scale Image Classification: Generalizing to New Classes at Near-Zero Cost Thomas Mensink 1,2 Jakob Verbeek 2 Florent Perronnin 1 Gabriela Csurka 1 1 TVPA - Xerox Research Centre
Metric Learning for Large Scale Image Classification: Generalizing to New Classes at Near-Zero Cost Thomas Mensink 1,2 Jakob Verbeek 2 Florent Perronnin 1 Gabriela Csurka 1 1 TVPA - Xerox Research Centre
Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study
 Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study J. Zhang 1 M. Marszałek 1 S. Lazebnik 2 C. Schmid 1 1 INRIA Rhône-Alpes, LEAR - GRAVIR Montbonnot, France
Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study J. Zhang 1 M. Marszałek 1 S. Lazebnik 2 C. Schmid 1 1 INRIA Rhône-Alpes, LEAR - GRAVIR Montbonnot, France
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Support Vector Machines
 Support Vector Machines About the Name... A Support Vector A training sample used to define classification boundaries in SVMs located near class boundaries Support Vector Machines Binary classifiers whose
Support Vector Machines About the Name... A Support Vector A training sample used to define classification boundaries in SVMs located near class boundaries Support Vector Machines Binary classifiers whose
Comparison of Feature Detection and Matching Approaches: SIFT and SURF
 GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
SCALE INVARIANT FEATURE EXTRACTION FOR IDENTIFYING AN OBJECT IN THE IMAGE USING MOMENT INVARIANTS
 Research Article SCALE INVARIAN FEAURE EXRACION FOR IDENIFYING AN OBJEC IN HE IMAGE USING MOMEN INVARIANS 1 R.Muralidharan, Dr.C.Chandrasear Address for Correspondence 1 Department of Computer Applications,
Research Article SCALE INVARIAN FEAURE EXRACION FOR IDENIFYING AN OBJEC IN HE IMAGE USING MOMEN INVARIANS 1 R.Muralidharan, Dr.C.Chandrasear Address for Correspondence 1 Department of Computer Applications,
CS 556: Computer Vision. Lecture 3
 CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Interest Points Harris corners Hessian points SIFT Difference-of-Gaussians SURF 2 Properties of Interest Points Locality
CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Interest Points Harris corners Hessian points SIFT Difference-of-Gaussians SURF 2 Properties of Interest Points Locality
Robust PDF Table Locator
 Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Announcements. CS 188: Artificial Intelligence Spring Generative vs. Discriminative. Classification: Feature Vectors. Project 4: due Friday.
 CS 188: Artificial Intelligence Spring 2011 Lecture 21: Perceptrons 4/13/2010 Announcements Project 4: due Friday. Final Contest: up and running! Project 5 out! Pieter Abbeel UC Berkeley Many slides adapted
CS 188: Artificial Intelligence Spring 2011 Lecture 21: Perceptrons 4/13/2010 Announcements Project 4: due Friday. Final Contest: up and running! Project 5 out! Pieter Abbeel UC Berkeley Many slides adapted
DA Progress report 2 Multi-view facial expression. classification Nikolas Hesse
 DA Progress report 2 Multi-view facial expression classification 16.12.2010 Nikolas Hesse Motivation Facial expressions (FE) play an important role in interpersonal communication FE recognition can help
DA Progress report 2 Multi-view facial expression classification 16.12.2010 Nikolas Hesse Motivation Facial expressions (FE) play an important role in interpersonal communication FE recognition can help
3D from Photographs: Automatic Matching of Images. Dr Francesco Banterle
 3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Yudistira Pictures; Universitas Brawijaya
 Evaluation of Feature Detector-Descriptor for Real Object Matching under Various Conditions of Ilumination and Affine Transformation Novanto Yudistira1, Achmad Ridok2, Moch Ali Fauzi3 1) Yudistira Pictures;
Evaluation of Feature Detector-Descriptor for Real Object Matching under Various Conditions of Ilumination and Affine Transformation Novanto Yudistira1, Achmad Ridok2, Moch Ali Fauzi3 1) Yudistira Pictures;
Recognition of a Predefined Landmark Using Optical Flow Sensor/Camera
 Recognition of a Predefined Landmark Using Optical Flow Sensor/Camera Galiev Ilfat, Alina Garaeva, Nikita Aslanyan The Department of Computer Science & Automation, TU Ilmenau 98693 Ilmenau ilfat.galiev@tu-ilmenau.de;
Recognition of a Predefined Landmark Using Optical Flow Sensor/Camera Galiev Ilfat, Alina Garaeva, Nikita Aslanyan The Department of Computer Science & Automation, TU Ilmenau 98693 Ilmenau ilfat.galiev@tu-ilmenau.de;
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
Instance-based Learning
 Instance-based Learning Machine Learning 10701/15781 Carlos Guestrin Carnegie Mellon University February 19 th, 2007 2005-2007 Carlos Guestrin 1 Why not just use Linear Regression? 2005-2007 Carlos Guestrin
Instance-based Learning Machine Learning 10701/15781 Carlos Guestrin Carnegie Mellon University February 19 th, 2007 2005-2007 Carlos Guestrin 1 Why not just use Linear Regression? 2005-2007 Carlos Guestrin
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Determinant of homography-matrix-based multiple-object recognition
 Determinant of homography-matrix-based multiple-object recognition 1 Nagachetan Bangalore, Madhu Kiran, Anil Suryaprakash Visio Ingenii Limited F2-F3 Maxet House Liverpool Road Luton, LU1 1RS United Kingdom
Determinant of homography-matrix-based multiple-object recognition 1 Nagachetan Bangalore, Madhu Kiran, Anil Suryaprakash Visio Ingenii Limited F2-F3 Maxet House Liverpool Road Luton, LU1 1RS United Kingdom
Image Features Detection, Description and Matching
 Image Features Detection, Description and Matching M. Hassaballah, Aly Amin Abdelmgeid and Hammam A. Alshazly Abstract Feature detection, description and matching are essential components of various computer
Image Features Detection, Description and Matching M. Hassaballah, Aly Amin Abdelmgeid and Hammam A. Alshazly Abstract Feature detection, description and matching are essential components of various computer
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Faster Image Feature Extraction Hardware
 IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727 PP 33-38 www.iosrjournals.org Jibu J.V, Sherin Das, Mini Kumari G Assistant Professor,College of Engineering, Chengannur.Alappuzha,
IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727 PP 33-38 www.iosrjournals.org Jibu J.V, Sherin Das, Mini Kumari G Assistant Professor,College of Engineering, Chengannur.Alappuzha,
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Classification and Detection in Images. D.A. Forsyth
 Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Face Recognition using SURF Features and SVM Classifier
 International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 8, Number 1 (016) pp. 1-8 Research India Publications http://www.ripublication.com Face Recognition using SURF Features
International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 8, Number 1 (016) pp. 1-8 Research India Publications http://www.ripublication.com Face Recognition using SURF Features
Instance-based Learning
 Instance-based Learning Machine Learning 10701/15781 Carlos Guestrin Carnegie Mellon University October 15 th, 2007 2005-2007 Carlos Guestrin 1 1-Nearest Neighbor Four things make a memory based learner:
Instance-based Learning Machine Learning 10701/15781 Carlos Guestrin Carnegie Mellon University October 15 th, 2007 2005-2007 Carlos Guestrin 1 1-Nearest Neighbor Four things make a memory based learner:
Automatic Image Alignment
 Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com