Image Features: Detection, Description, and Matching and their Applications
|
|
|
- Julie Carpenter
- 5 years ago
- Views:
Transcription
1 Image Features: Detection, Description, and Matching and their Applications

2 Image Representation: Global Versus Local Features

3 Features/ keypoints/ interset points are interesting locations in the image. Features serve to give a new compact representation of an image. Features can describe objects. Types of image features: Edges, Corners, blobs, small image patches
4 Global Features Image is represented by one multidimensional feature vector, describing the information in the whole image. Measure various aspects of the image such as color, texture or shape. Much faster and compact while easy to compute and generally require small amounts of memory. Not invariant to significant transformations and sensitive to clutter and occlusion. Local Features Image may have hundreds of local features. Measure local structures that are more distinctive and stable than other structures. Local features have superior performance. Robust against occlusion and background clutter.


5 Features Corner Region Edge
6 Features Detection: Detection: identify the interest points Feature detection = how to find some interesting points (features) in the image.(ex: find a corner, find a region and so on...)
7 Features Detection: Detectors Single-scale Multi-scale Affineinvariant Harris FAST SUSAN Harris- Laplace Hessian- Laplace LOG DOG Harris- Affine Hessian -Affine

8
9 Features description: Description: Extract feature vector surrounding each interest point. Feature description = how to represent the interesting points we found to compare them with other interesting points (features) in the image.
")

10 Features description Descriptors Gradient-based (Floating point) Binary-based (Binary string) SIFT SURF GLOH BRIEF ORB BRISK FREAK
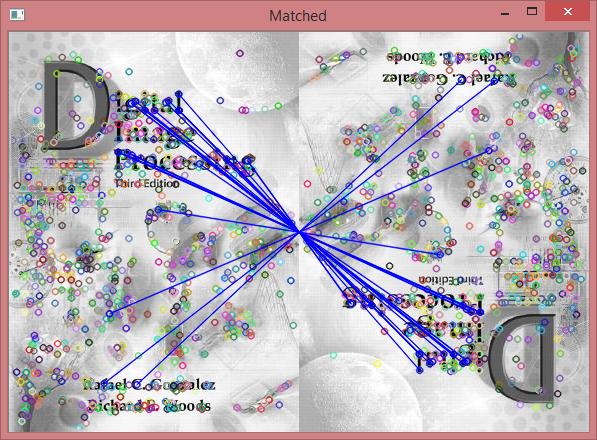
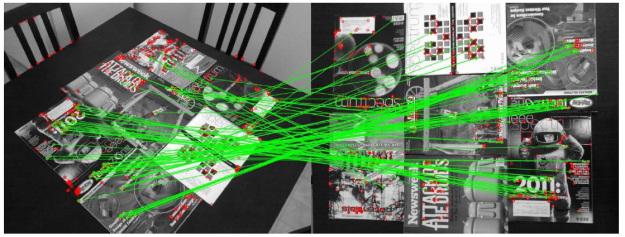
11 Features Matching: Matching: match/compare the extracted descriptor from the query image to those in the database. Feature Matching= find the distance between two or more descriptors/ finding the similarity.
12 Features Matching: Given two such patches, how can we determine their similarity? We can measure the pixel to pixel similarity by measuring their Euclidean distance, but that measure is very sensitive to noise, rotation, translation and illumination changes. In most applications we would like to be robust to such changes.
13
14
15 Applications 1.Object Recognition 2. Camera Calibration 3. Image Retrieval 4. Image Registration
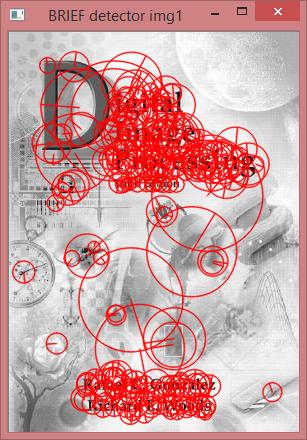
16 Binary Descriptors Binary descriptors are composed of three parts: A sampling pattern: where to sample points in the region around the feature/keypoint. Orientation compensation: some mechanism to measure the orientation of the keypoint and rotate it to compensate for rotation changes. Sampling pairs: which pairs to compare when building the final descriptor.
17 Why binary descriptors? Pixel comparisons are much faster than gradients. Matching binary representations is done using hamming distance which is much faster to compute than any distance metric. Whereas a single gradient based descriptor commonly require 64 or 128 floating point values to store, a single binary descriptors requires only 512 bits 4 to 8 times less.
18 Change of scale Challenges Change of orientation (rotation) Change of viewpoint (affine, projective transformations) Change of illumination Noise, Clutter, and occlusion Repetitive patterns (windows, street marks, etc.) Thus, we need robust similarity measures, detector, descriptors, and matchers
19 Ideas Studying the effect of different sampling patterns on descriptors performance. Investigating the effect of different similarity metrics on the matching performance. Adaptation of binary descriptors for computational resources. Enhancing existing descriptors robustness against geometric and photometric transformations. Proposing our own descriptor and using it in applications.

20 Thank you

21 A schematic representation of the SIFT descriptor for a pixel patch and a 4 4 descriptor array

22 schematic representation of the GLOH algorithm using log-polar bins
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
State-of-the-Art: Transformation Invariant Descriptors. Asha S, Sreeraj M
 International Journal of Scientific & Engineering Research, Volume 4, Issue ş, 2013 1994 State-of-the-Art: Transformation Invariant Descriptors Asha S, Sreeraj M Abstract As the popularity of digital videos
International Journal of Scientific & Engineering Research, Volume 4, Issue ş, 2013 1994 State-of-the-Art: Transformation Invariant Descriptors Asha S, Sreeraj M Abstract As the popularity of digital videos
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Eppur si muove ( And yet it moves )
") Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
3D from Photographs: Automatic Matching of Images. Dr Francesco Banterle
 3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Image Matching. AKA: Image registration, the correspondence problem, Tracking,
 Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Feature Detection and Matching
 and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Lecture 4.1 Feature descriptors. Trym Vegard Haavardsholm
 Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Comparison of Local Feature Descriptors
 Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Yudistira Pictures; Universitas Brawijaya
 Evaluation of Feature Detector-Descriptor for Real Object Matching under Various Conditions of Ilumination and Affine Transformation Novanto Yudistira1, Achmad Ridok2, Moch Ali Fauzi3 1) Yudistira Pictures;
Evaluation of Feature Detector-Descriptor for Real Object Matching under Various Conditions of Ilumination and Affine Transformation Novanto Yudistira1, Achmad Ridok2, Moch Ali Fauzi3 1) Yudistira Pictures;
A Fuzzy Brute Force Matching Method for Binary Image Features
 A Fuzzy Brute Force Matching Method for Binary Image Features Erkan Bostanci 1, Nadia Kanwal 2 Betul Bostanci 3 and Mehmet Serdar Guzel 1 1 (Computer Engineering Department, Ankara University, Turkey {ebostanci,
A Fuzzy Brute Force Matching Method for Binary Image Features Erkan Bostanci 1, Nadia Kanwal 2 Betul Bostanci 3 and Mehmet Serdar Guzel 1 1 (Computer Engineering Department, Ankara University, Turkey {ebostanci,
3D Object Recognition using Multiclass SVM-KNN
 3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Object Detection by Point Feature Matching using Matlab
 Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Scale Invariant Feature Transform by David Lowe
 Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Local Patch Descriptors
 Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Click to edit title style
 Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Object Recognition Algorithms for Computer Vision System: A Survey
 Volume 117 No. 21 2017, 69-74 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Object Recognition Algorithms for Computer Vision System: A Survey Anu
Volume 117 No. 21 2017, 69-74 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Object Recognition Algorithms for Computer Vision System: A Survey Anu
Outline. Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion. Media IC & System Lab Po-Chen Wu 2
 Outline Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion Media IC & System Lab Po-Chen Wu 2 Outline Introduction System Overview Camera Calibration
Outline Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion Media IC & System Lab Po-Chen Wu 2 Outline Introduction System Overview Camera Calibration
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching
 Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Fast Image Matching Using Multi-level Texture Descriptor
 Fast Image Matching Using Multi-level Texture Descriptor Hui-Fuang Ng *, Chih-Yang Lin #, and Tatenda Muindisi * Department of Computer Science, Universiti Tunku Abdul Rahman, Malaysia. E-mail: nghf@utar.edu.my
Fast Image Matching Using Multi-level Texture Descriptor Hui-Fuang Ng *, Chih-Yang Lin #, and Tatenda Muindisi * Department of Computer Science, Universiti Tunku Abdul Rahman, Malaysia. E-mail: nghf@utar.edu.my
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
A System of Image Matching and 3D Reconstruction
 A System of Image Matching and 3D Reconstruction CS231A Project Report 1. Introduction Xianfeng Rui Given thousands of unordered images of photos with a variety of scenes in your gallery, you will find
A System of Image Matching and 3D Reconstruction CS231A Project Report 1. Introduction Xianfeng Rui Given thousands of unordered images of photos with a variety of scenes in your gallery, you will find
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
Robust Binary Feature using the Intensity Order
 Robust Binary Feature using the Intensity Order Yukyung Choi*, Chaehoon Park*, Joon-Young Lee, and In So Kweon Robotics and Computer Vision Lab., KAIST, Korea Abstract. Binary features have received much
Robust Binary Feature using the Intensity Order Yukyung Choi*, Chaehoon Park*, Joon-Young Lee, and In So Kweon Robotics and Computer Vision Lab., KAIST, Korea Abstract. Binary features have received much
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
A Hybrid Feature Extractor using Fast Hessian Detector and SIFT
 Technologies 2015, 3, 103-110; doi:10.3390/technologies3020103 OPEN ACCESS technologies ISSN 2227-7080 www.mdpi.com/journal/technologies Article A Hybrid Feature Extractor using Fast Hessian Detector and
Technologies 2015, 3, 103-110; doi:10.3390/technologies3020103 OPEN ACCESS technologies ISSN 2227-7080 www.mdpi.com/journal/technologies Article A Hybrid Feature Extractor using Fast Hessian Detector and
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Image Matching Using SIFT, SURF, BRIEF and ORB: Performance Comparison for Distorted Images
 Image Matching Using SIFT, SURF, BRIEF and ORB: Performance Comparison for Distorted Images Ebrahim Karami, Siva Prasad, and Mohamed Shehata Faculty of Engineering and Applied Sciences, Memorial University,
Image Matching Using SIFT, SURF, BRIEF and ORB: Performance Comparison for Distorted Images Ebrahim Karami, Siva Prasad, and Mohamed Shehata Faculty of Engineering and Applied Sciences, Memorial University,
Recognition of Degraded Handwritten Characters Using Local Features. Markus Diem and Robert Sablatnig
 Recognition of Degraded Handwritten Characters Using Local Features Markus Diem and Robert Sablatnig Glagotica the oldest slavonic alphabet Saint Catherine's Monastery, Mount Sinai Challenges in interpretation
Recognition of Degraded Handwritten Characters Using Local Features Markus Diem and Robert Sablatnig Glagotica the oldest slavonic alphabet Saint Catherine's Monastery, Mount Sinai Challenges in interpretation
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Click to edit title style
 Class 3: Low-level Representation Liangliang Cao, Feb 6, 2014 EECS 6890 Topics in Information Processing Spring 2014, Columbia University http://rogerioferis.com/visualrecognitionandsearch2014 Visual Recognition
Class 3: Low-level Representation Liangliang Cao, Feb 6, 2014 EECS 6890 Topics in Information Processing Spring 2014, Columbia University http://rogerioferis.com/visualrecognitionandsearch2014 Visual Recognition
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
Bias-Variance Trade-off (cont d) + Image Representations
 + Image Representations") CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
Ulas Bagci
 CAP5415- Computer Vision Lecture 5 and 6- Finding Features, Affine Invariance, SIFT Ulas Bagci bagci@ucf.edu 1 Outline Concept of Scale Pyramids Scale- space approaches briefly Scale invariant region selecqon
CAP5415- Computer Vision Lecture 5 and 6- Finding Features, Affine Invariance, SIFT Ulas Bagci bagci@ucf.edu 1 Outline Concept of Scale Pyramids Scale- space approaches briefly Scale invariant region selecqon
Analysis of Feature Detector and Descriptor Combinations with a Localization Experiment for Various Performance Metrics
 Analysis of Feature Detector and Descriptor Combinations with a Localization Experiment for Various Performance Metrics Ertugrul BAYRAKTAR*, Pınar BOYRAZ Graduate School of Science Engineering and Technology
Analysis of Feature Detector and Descriptor Combinations with a Localization Experiment for Various Performance Metrics Ertugrul BAYRAKTAR*, Pınar BOYRAZ Graduate School of Science Engineering and Technology
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM INTRODUCTION
 A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
Local Descriptor based on Texture of Projections
 Local Descriptor based on Texture of Projections N V Kartheek Medathati Center for Visual Information Technology International Institute of Information Technology Hyderabad, India nvkartheek@research.iiit.ac.in
Local Descriptor based on Texture of Projections N V Kartheek Medathati Center for Visual Information Technology International Institute of Information Technology Hyderabad, India nvkartheek@research.iiit.ac.in
Image Features Detection, Description and Matching
 Image Features Detection, Description and Matching M. Hassaballah, Aly Amin Abdelmgeid and Hammam A. Alshazly Abstract Feature detection, description and matching are essential components of various computer
Image Features Detection, Description and Matching M. Hassaballah, Aly Amin Abdelmgeid and Hammam A. Alshazly Abstract Feature detection, description and matching are essential components of various computer
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
ARTVision Tracker 2D
 DAQRI ARToolKit 6/Open Source ARTVision Tracker 2D Natural Feature Tracking in ARToolKit6 Dan 2017-01 ARTVision 2D Background Core texture tracking algorithm for ARToolKit 6. Developed and contributed
DAQRI ARToolKit 6/Open Source ARTVision Tracker 2D Natural Feature Tracking in ARToolKit6 Dan 2017-01 ARTVision 2D Background Core texture tracking algorithm for ARToolKit 6. Developed and contributed
Comparison of Feature Detection and Matching Approaches: SIFT and SURF
 GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
Review on Feature Detection and Matching Algorithms for 3D Object Reconstruction
 Review on Feature Detection and Matching Algorithms for 3D Object Reconstruction Amit Banda 1,Rajesh Patil 2 1 M. Tech Scholar, 2 Associate Professor Electrical Engineering Dept.VJTI, Mumbai, India Abstract
Review on Feature Detection and Matching Algorithms for 3D Object Reconstruction Amit Banda 1,Rajesh Patil 2 1 M. Tech Scholar, 2 Associate Professor Electrical Engineering Dept.VJTI, Mumbai, India Abstract
Semantic Kernels Binarized A Feature Descriptor for Fast and Robust Matching
 2011 Conference for Visual Media Production Semantic Kernels Binarized A Feature Descriptor for Fast and Robust Matching Frederik Zilly 1, Christian Riechert 1, Peter Eisert 1,2, Peter Kauff 1 1 Fraunhofer
2011 Conference for Visual Media Production Semantic Kernels Binarized A Feature Descriptor for Fast and Robust Matching Frederik Zilly 1, Christian Riechert 1, Peter Eisert 1,2, Peter Kauff 1 1 Fraunhofer
CS 556: Computer Vision. Lecture 3
 CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Interest Points Harris corners Hessian points SIFT Difference-of-Gaussians SURF 2 Properties of Interest Points Locality
CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Interest Points Harris corners Hessian points SIFT Difference-of-Gaussians SURF 2 Properties of Interest Points Locality
Requirements for region detection
 Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
A Comparison of SIFT and SURF
 A Comparison of SIFT and SURF P M Panchal 1, S R Panchal 2, S K Shah 3 PG Student, Department of Electronics & Communication Engineering, SVIT, Vasad-388306, India 1 Research Scholar, Department of Electronics
A Comparison of SIFT and SURF P M Panchal 1, S R Panchal 2, S K Shah 3 PG Student, Department of Electronics & Communication Engineering, SVIT, Vasad-388306, India 1 Research Scholar, Department of Electronics
III. VERVIEW OF THE METHODS
 An Analytical Study of SIFT and SURF in Image Registration Vivek Kumar Gupta, Kanchan Cecil Department of Electronics & Telecommunication, Jabalpur engineering college, Jabalpur, India comparing the distance
An Analytical Study of SIFT and SURF in Image Registration Vivek Kumar Gupta, Kanchan Cecil Department of Electronics & Telecommunication, Jabalpur engineering college, Jabalpur, India comparing the distance
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
3D Vision. Viktor Larsson. Spring 2019
 3D Vision Viktor Larsson Spring 2019 Schedule Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar 25 Apr 1 Apr 8 Apr 15 Apr 22 Apr 29 May 6 May 13 May 20 May 27 Introduction Geometry, Camera Model, Calibration Features,
3D Vision Viktor Larsson Spring 2019 Schedule Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar 25 Apr 1 Apr 8 Apr 15 Apr 22 Apr 29 May 6 May 13 May 20 May 27 Introduction Geometry, Camera Model, Calibration Features,
Vision and Image Processing Lab., CRV Tutorial day- May 30, 2010 Ottawa, Canada
 Spatio-Temporal Salient Features Amir H. Shabani Vision and Image Processing Lab., University of Waterloo, ON CRV Tutorial day- May 30, 2010 Ottawa, Canada 1 Applications Automated surveillance for scene
Spatio-Temporal Salient Features Amir H. Shabani Vision and Image Processing Lab., University of Waterloo, ON CRV Tutorial day- May 30, 2010 Ottawa, Canada 1 Applications Automated surveillance for scene
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Invariant Local Feature for Image Matching
 Invariant Local Feature for Image Matching Wong Yuk-Man Term Paper for the Degree of Master of Philosophy in Computer Science and Engineering Supervised by Prof. Michael R. Lyu c The Chinese University
Invariant Local Feature for Image Matching Wong Yuk-Man Term Paper for the Degree of Master of Philosophy in Computer Science and Engineering Supervised by Prof. Michael R. Lyu c The Chinese University
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Local Difference Binary for Ultrafast and Distinctive Feature Description
 Local Difference Binary for Ultrafast and Distinctive Feature Description Xin Yang, K.-T. Tim Cheng IEEE Trans. on Pattern Analysis and Machine Intelligence, 2014, January *Source code has been released
Local Difference Binary for Ultrafast and Distinctive Feature Description Xin Yang, K.-T. Tim Cheng IEEE Trans. on Pattern Analysis and Machine Intelligence, 2014, January *Source code has been released
Performance Analysis of Computationally Efficient Model based Object Detection and Recognition Techniques
 IJSTE - International Journal of Science Technology & Engineering Volume 3 Issue 01 July 2016 ISSN (online): 2349-784X Performance Analysis of Computationally Efficient Model based Object Detection and
IJSTE - International Journal of Science Technology & Engineering Volume 3 Issue 01 July 2016 ISSN (online): 2349-784X Performance Analysis of Computationally Efficient Model based Object Detection and
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Visual Object Recognition
 Visual Object Recognition Lecture 3: Descriptors Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University 2015 2014 Per-Erik Forssén Lecture 3: Descriptors
Visual Object Recognition Lecture 3: Descriptors Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University 2015 2014 Per-Erik Forssén Lecture 3: Descriptors
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department