FORC 3 ES. FMF October 10 th Contributors Forces 3: Pierre-Loïc Garoche, Thomas Loquen, Eric Noulard, Claire Pagetti, Clément Roos, Pierre Roux
|
|
|
- Briana Doyle
- 6 years ago
- Views:
Transcription

1 FORC 3 ES Contributors Forces 3: Pierre-Loïc Garoche, Thomas Loquen, Eric Noulard, Claire Pagetti, Clément Roos, Pierre Roux FMF October 10 th
2 Outline! Introduction 1. Project description 2. Example avion jaune! Safe code generation! Verification! Conclusion 2

3 Context " Certified embedded systems - Constraints on the development process / Verification objectives - Control-command application: safety critical system " Issues Safety At limited costs Technical means Automatisation Verification as early as possible in the process Formal verification (mathematical proof)

 4m span 4h")
4 Application target " Targeted for civil aircrafts With certification constraints " Experimented on a UAV: «Avion jaune» 11kg (empty) 4m span 4h autonomy

5 Architecture Based in 3 micro-controllers ARM Cortex M3 (80MHz, Flash : 512Ko, internal RAM : 96Ko) 1 function #$ 1 micro-controller NAVIGATION : flight management PILOTE : commande SECOURS : hand over the manual pilot in case of problem 5
6 Objective of Forc 3 es " Formal development chain - Automated development - With verification at all stages - Dedicated to control-command systems - From control laws to embedded code " Global Optimisation - Bridging the gap between system and software - Carrying information to ease formal verification all along the way " Incrementality - Manage evolutions efficiently 6


7 Trends in avionic domain Control design level - Tools: Matlab / Simulink - High level requirements Implementation level - Coding of elementary blocks: Scade - Coding of multi-periodic assembly: home made language, manual coding, I/O (I2C, SPI, UART, USB,...) COTS hardware integration DDR3 Memory Controller 0,0 1,0 0,1 1,1 0,2 1,2 0,3 1,3 0,4 1,4 2,0 3,0 4,0 5,0 2,1 3,1 4,1 5,1 2,2 3,2 2,3 3,3 2,4 3,4 4,2 5,2 4,3 5,3 4,4 5,4 DDR3 Memory Controller - Automatic code generator - Manual code - Low level services - WCET assessment 0,5 1,5 2,5 3,5 4,5 5,5 4x GigaBit Ethernet 3x PCIe 2.0 7
 tel returns (sensor: real) wcet 5; node ex (i1 : rate(8,0); i2 : rate(20,0)) returns (01, 02); let ::: tel Steps: discrete models % choice of sampling periods performance properties %")

8 Objective of the Forc3es Integrated Development Framework Control design level " " node voter (s1, s2, s3: real) returns (sensor: real); let verification : : : imported node syst ((s1, s2, s3: real) tel returns (sensor: real) wcet 5; node ex (i1 : rate(8,0); i2 : rate(20,0)) returns (01, 02); let ::: tel Steps: discrete models % choice of sampling periods performance properties % definition of simulation tests Integer properties% identification of invariants Tools: Matlab / Simulink Implementation level " Steps: Coding: automatic code generation - elementary blocks: Lustre - multi-periodic assembly: Prelude Verification - Performances : simulation with SchedMcore - Invariants analysis Integration level " Steps: Integration + test on the iron bird Integration on the real UAV
9 Outline! Introduction 1. Project description 2. Example avion jaune! Safe code generation! Verification! Conclusion 9
10 «Avion jaune» longitudinal control part " Nonlinear aircraft model (dynamic model + actuator) " Linearization around a flight point " Controller synthesis 10
11 «Avion jaune» longitudinal control part " control laws allowing speed control and altitude control 11
12 Performance properties " Altitude change request 12
13 Outline! Introduction! Safe code generation! Verification! Conclusion 13
14 Safe code generation " Principle: several tools & Simulink % synchronous languages: ONERA/NASA toolbox (CocoSim/ Sim2LustrePrelude) CocoSim & & Lustre % C: lustrec compiler (ONERA/ ENSEEIHT) Prelude%C: preludec compiler (ONERA/ LIFL) node voter (s1, s2, s3: real) Imported node syst ((s1, s2, s3: real) returns (sensor: real); returns (sensor: real) wcet 5; let node ex (i1 : rate(8,0); i2 : rate(20,0)) : : : tel lustrec returns (01, 02); let : : : tel preludec void voter_step(){ } void syst_step(){ }
 Exploration of the Simulink architecture 2) Pretty-printing \" ONERA/NASA toolbox (CocoSim) - Open source Matlab library - Input: Simulink -")
15 1. Simulink $ synchronous language code generation " Principles: - Elementary blocks (gain, integrator, ) and mono-periodic assemblies % Lustre - Multi-periodic assemblies % Prelude " Software architecture language " With real-time primitives 1) Exploration of the Simulink architecture 2) Pretty-printing " ONERA/NASA toolbox (CocoSim) - Open source Matlab library - Input: Simulink - Outputs: Lustre / Prelude Lustre node voter (s1, s2, s3: real) returns (sensor: real); let - Advantages: optimized for and specific to ONERA/NASA controllers - Drawback: does not apply to any Simulink system : : : tel Imported node voter ((s1, s2, s3: real) returns (sensor: real) wcet 5; node ex (i1 : rate(8,0); i2 : rate(20,0)) returns (01, 02); let : : : tel Prelude
16 Translation tool: example UAV control design %file main.m % Data loading % UAV data include in AJ.mat load AJ T_env=1e-4; % UAV sample-time ('continuous' time) %load controller data controller_data; Fs=50; % Auto-pilot frequency [Hz] Ts=1/Fs; % Auto-pilot sample time [s] %name of the Simulink model simulink_model='bf_nl_discret'; %main routine; main node in Prelude, no comment cocosim(simulink_model, [], T_env, [], [],true, [],false); Results: synchronous language files bf_nl_discret_bloc.lus Lustre elementary nodes and mono-rate assembly bf_nl_discret_assemblage.plu Prelude assembly of multi-rate nodes
17 Simulink $ synchronous languages (main steps)
18 Simulink $ synchronous languages (main steps) Lustre node with state node example1_int1 (Sum_1_1 :real ) returns ( Int1_1_1 :real ) let Int1_1_1 = > (1.00 * * pre Sum_1_1) + pre Int1_1_1; tel origin_name: {'example1/int1'} name: {'example1/int1'} annotation: e+03 type: { Integrator'} num_input: 1 num_output: 1 pre: {[1.5400e+03]} srcport: {[0]} post: {[1.5450e+03]} dstport: {[0]} rounding: 'Floor' prename: {{1x1 cell}} postname: {{1x1 cell}} sample_time: '0.01' srcport_size: 1 dstport_size: 1 inports_dt: {'double'} outports_dt: {'double'} inports_dim: [1 1] outports_dim: [1 1] conversion: {'double'} ismulti: 0 [...]
19 Simulink $ synchronous languages (main steps) Lustre node node example1_assemblage (I2_1_1, I1_1_1 :real) returns ( Y1_1 :real ) var Int1_1_1, K1_1_1, K2_1_1 :real ; let tel (Int1_1_1) = example1_int1( K1_1_1+K2_1_1) ; (K1_1_1) = 10*I1_1_1; (K2_1_1) = 0.1*I2_1_1; Y1_1 = Int1_1_1 ;
20 Simulink $ synchronous languages (main steps) Prelude node node example1_assemblage (Z_ref_1_1, Va_ref_1_1 :real rate (200,0)) returns ( q_1_1, gamma_1_1, Va_1_1, Vz_1_1, Z_1_1 :real ) var out1_1_1, out2_1_1:real ; let tel 20 (out1_1_1, out2_1_1) = control_laws(z_ref_1_1, Va_ref_1_1, (i1 fby (q_1_1, gamma_1_1, Va_1_1, Vz_1_1, Z_1_1))/^200, (i2 fby rpms) /^200) ; (q_1_1, gamma_1_1, Va_1_1, Vz_1_1, Z_1_1, rpms) = aircraft (out1_1_1 *^200, out2_1_1 *^200)
21 Related work " Many company internal code generators " GENE-AUTO & open-source code generation toolset (ITEA project) & & & input: Simulink, Stateflow or Scicos output: C or Ada; lustre (collaboration ONERA, IRIT, NASA) limits: - Matlab Simulink r2008b, no fancy blocks, no complex z-expressions, just unit delays - Translate from an output generated file (not directly playing with the internal Simulink representation) " Stavros Tripakis, Christos Sofronis, Paul Caspi, Adrian Curic. Translating discrete-time Simulink to Lustre. ACM Transaction Embedded Computing Systems 4(4): (2005) 21
22 2. Lustre compiler (LustreC) " Output: C or Java " Open source implementation of Biernacki et al. [Dariusz Biernacki, Jean-Louis Colaço, Grégoire Hamon, and Marc Pouzet. Clock-directed modular code generation for synchronous data- flow languages. In Kriszti an Flautner and John Regehr, editors, LCTES, pages ACM, 2008] " Collaboration with IRIT-ENSEEIHT (X. Thirioux) Available at cavale.enseeiht.fr/redmine/projects/lustrec " Compilation strategy " Same as Esterel Scade certified compiler " Less efficient than other compilation scheme but used in industry and certifiable " Provide traceability (and verification means)
23 3. Compilateur Prelude (Preludec) " Output: C " Open source implementation Collaboration with LIFL (J. Forget) and Airbus Defence and Space (D. Lesens) Available at " Compilation strategy Static communication buffers Shared memory or message passing 23
24 Outline! Introduction! Safe code generation! Verification! Conclusion 24
25 Verification activities 1 Property 1: " Performance analysis & simulation 2 Property 2: " Discrete properties verification & formal verification techniques verification node voter (s1, s2, s3: real) returns (sensor: real); let : : : tel Imported node voter (s1, s2, s3: real) returns (sensor: real) wcet 5; node ex (i1 : rate(8,0); i2 : rate(20,0)) returns (01, 02); let : : : tel 25
26 Property 1. Simulation at implementation level " SchedMcore open source ONERA tool " Objective " Simulation of the specification " Real-time constraints are assumed correct " Input " Lustre and Prelude programs (several assemblies can be encoded) " Results " Temporal simulations according to the scenario tests defined at control design level " if simulations are compliant, " high level properties are still satisfied " It simplifies the integration level
27 Implantation level: example UAV control design Define simulation parameters Complete the file bf_nl_discret_assemblage_include_sensors_actuators.c to select outputs to observe (actuators) and the value of inputs (sensors). Nominal flight point of the aircraft ' Airspeed Va=20m/s ' Altitude Z=100m. Requirements ' Airspeed =20m/s ' Altitude = 90m Use provided makefile to compile with Lustrec and Preludec. Results : binary loadable library libfilename.so (or generated C) usable by various tools : scheduling analysis tool functional simulator real-time executor target runtime (OS, supervisor, in-house runtime)
28 Simulation level: example UAV control design Simulation on 30s with a step time of 1e-4s lsmc_sim -l./libtest_bf_nl_discret_assemblage-noencoding.so -m Evolution of speed (left) and altitude (right)

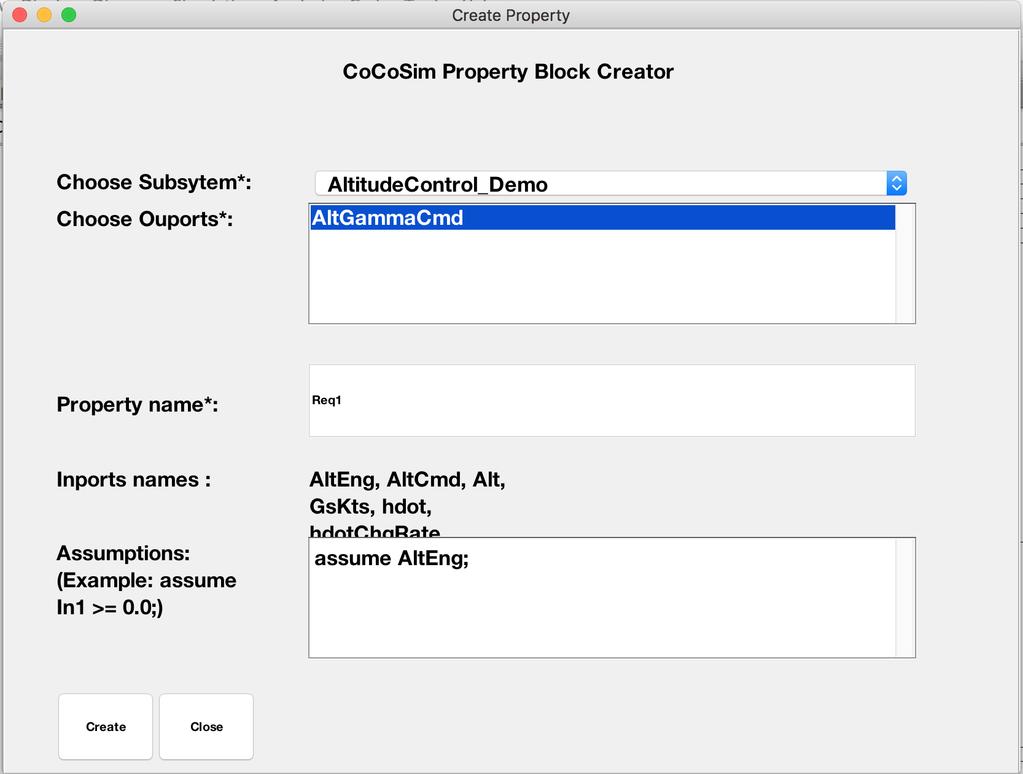
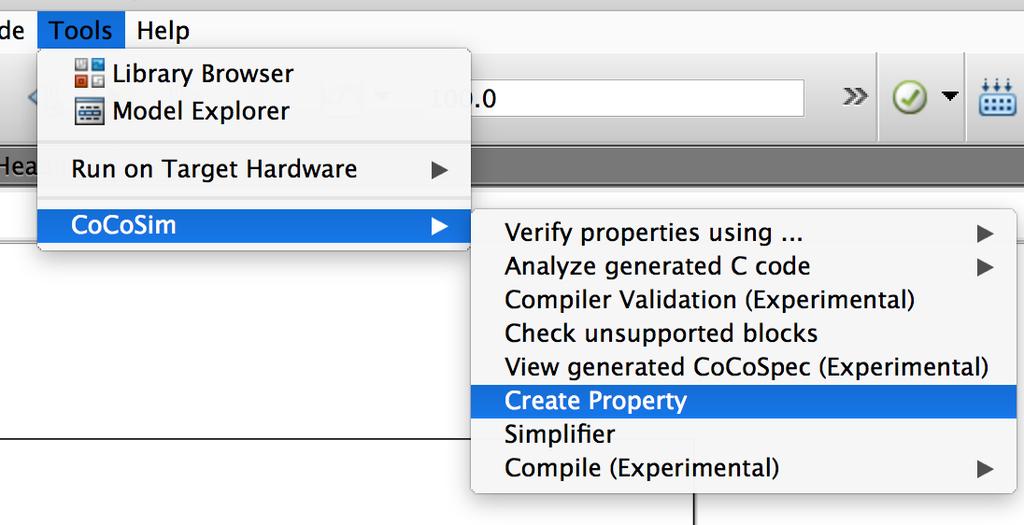
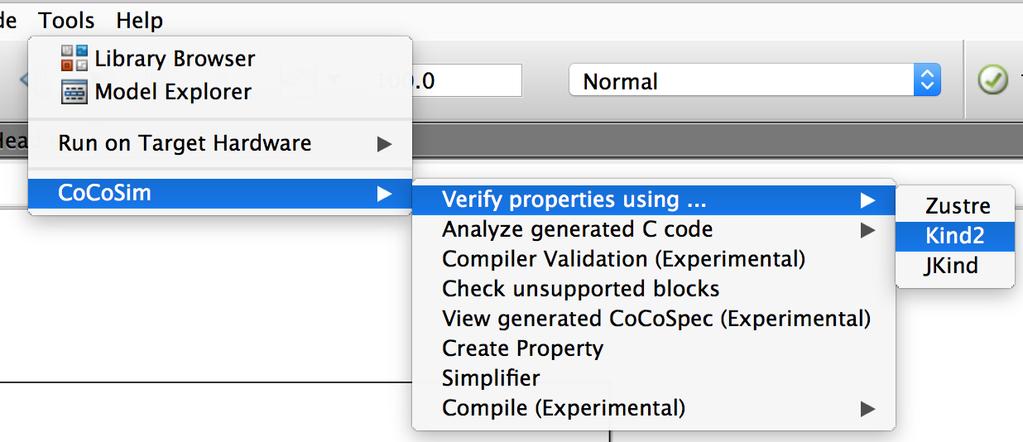
29 Property 2: Automated Analysis framework for Simulink/Stateflow Motivation: CoCoSim: Automated Analysis and Compilation framework for Simulink/Stateflow 29




30 Safety properties analysis " Valid: model satisfies the specification " Invalid: model does not satisfy the specification " Counter-example: execution that violates the specification 30
31 Functioning 31
32 Functioning 32
33 Example 33
34 Example On SYS, Horn clause: (In1 >= In2 => Switch = In1) and (In1 < In2 => Switch = In2) and (Switch > 0 => abs = Switch) and (Switch < 0 => abs = -Switch) and (Out2 = Abs) and (Out1 = Switch) On SPEC, Horn clause: Req = ((In1 > In2) or (Out1 <= Out2)) On global: main and not Req => ERR Use of Z3 to query ERR 34
35 Example (real generated clause for SYS) (rule (=> (and (and (or (not (= (>= cocospec_3_pp_sys.in1_1_1 cocospec_3_pp_sys.in2_1_1) true)) (= cocospec_3_pp_sys.switch_1_1 cocospec_3_pp_sys.in1_1_1)) ) (or (not (= (>= cocospec_3_pp_sys.in1_1_1 cocospec_3_pp_sys.in2_1_1) false)) (= cocospec_3_pp_sys.switch_1_1 cocospec_3_pp_sys.in2_1_1)) (and (or (not (= (>= cocospec_3_pp_sys.switch_1_1 0) true)) ) (= cocospec_3_pp_sys.abs_1_1 cocospec_3_pp_sys.switch_1_1)) (or (not (= (>= cocospec_3_pp_sys.switch_1_1 0) false)) (= cocospec_3_pp_sys.abs_1_1 (- cocospec_3_pp_sys.switch_1_1))) (= cocospec_3_pp_sys.out2_2_1 cocospec_3_pp_sys.abs_1_1) (= cocospec_3_pp_sys.out1_1_1 cocospec_3_pp_sys.switch_1_1) ) (cocospec_3_pp_sys_fun cocospec_3_pp_sys.in1_1_1 cocospec_3_pp_sys.in2_1_1 cocospec_3_pp_sys.out1_1_1 cocospec_3_pp_sys.out2_2_1) )) 35
36 Outline! Introduction! Safe code generation! Verification! Conclusion 36
37 Conclusion and future work " Consolidation of ONERA/NASA toolbox " Execution on the iron bird and «avion jaune» 37
 \" Autoriser le développement rapide sur matériel réel et des essais en vol")
38 IronBird «avion jaune» " Iron Bird : une maquette à l échelle 3/8 du véritable Altimum (Société L avion jaune) Capteurs, actionneurs calculateur réel (sauf moteur) " Autoriser le développement rapide sur matériel réel et des essais en vol virtuel 38
 sont simulés et couplés à l IronBird La radio-commande, le")

39 IronBird HIL simulation Boucle fermée avec matériel réel (HIL) L environnement (JSBSim) et le modèle avion (ONERA) sont simulés et couplés à l IronBird La radio-commande, le calculateur bord et les servos moteur de l IronBird sont réels Visualisation «vol virtuel» avec FlightGear Logiciel de vol embarqué issu de la chaine de production ONERA pour FORCES3 39
40 Conclusion Thank you for your attention! 40
System-level co-modeling AADL and Simulink specifications using Polychrony (and Syndex)
") System-level co-modeling AADL and Simulink specifications using Polychrony (and Syndex) AADL Standards Meeting June 6., 2011 Jean-Pierre Talpin, INRIA Parts of this presentation are joint work with Paul,
System-level co-modeling AADL and Simulink specifications using Polychrony (and Syndex) AADL Standards Meeting June 6., 2011 Jean-Pierre Talpin, INRIA Parts of this presentation are joint work with Paul,
Simulink/Stateflow. June 2008
 Simulink/Stateflow Paul Caspi http://www-verimag.imag.fr/ Pieter Mosterman http://www.mathworks.com/ June 2008 1 Introduction Probably, the early designers of Simulink in the late eighties would have been
Simulink/Stateflow Paul Caspi http://www-verimag.imag.fr/ Pieter Mosterman http://www.mathworks.com/ June 2008 1 Introduction Probably, the early designers of Simulink in the late eighties would have been
Clock-directed Modular Code-generation for Synchronous Data-flow Languages
 1 Clock-directed Modular Code-generation for Synchronous Data-flow Languages Dariusz Biernacki Univ. of Worclaw (Poland) Jean-Louis Colaço Prover Technologies (France) Grégoire Hamon The MathWorks (USA)
1 Clock-directed Modular Code-generation for Synchronous Data-flow Languages Dariusz Biernacki Univ. of Worclaw (Poland) Jean-Louis Colaço Prover Technologies (France) Grégoire Hamon The MathWorks (USA)
An Introduction to Lustre
 An Introduction to Lustre Monday Oct 06, 2014 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/35 ES Programming languages Which language to write embedded software in? Traditional: low-level
An Introduction to Lustre Monday Oct 06, 2014 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/35 ES Programming languages Which language to write embedded software in? Traditional: low-level
Programming Embedded Systems
 Programming Embedded Systems Lecture 10 An introduction to Lustre Wednesday Feb 15, 2012 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/34 Course topic: programming lang. Which language to
Programming Embedded Systems Lecture 10 An introduction to Lustre Wednesday Feb 15, 2012 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/34 Course topic: programming lang. Which language to
Verifying a Lustre Compiler Part 2
 Verifying a Lustre Compiler Part 2 Lélio Brun PARKAS (Inria - ENS) Timothy Bourke, Pierre-Évariste Dagand, Xavier Leroy, Marc Pouzet, Lionel Rieg SYNCHRON 2016 December 7, 2016 Lélio Brun Verifying a Lustre
Verifying a Lustre Compiler Part 2 Lélio Brun PARKAS (Inria - ENS) Timothy Bourke, Pierre-Évariste Dagand, Xavier Leroy, Marc Pouzet, Lionel Rieg SYNCHRON 2016 December 7, 2016 Lélio Brun Verifying a Lustre
The TASTE MBE development toolchain - update & case-studies
 The TASTE MBE development toolchain - update & case-studies Julien Delange 18/10/2010 Agenda 1. Overview of the TASTE environment 2. Latest improvements 3. Ongoing projects, conclusion TASTE update & case-studies
The TASTE MBE development toolchain - update & case-studies Julien Delange 18/10/2010 Agenda 1. Overview of the TASTE environment 2. Latest improvements 3. Ongoing projects, conclusion TASTE update & case-studies
Towards an industrial use of FLUCTUAT on safety-critical avionics software
 Towards an industrial use of FLUCTUAT on safety-critical avionics software David Delmas 1, Eric Goubault 2, Sylvie Putot 2, Jean Souyris 1, Karim Tekkal 3 and Franck Védrine 2 1. Airbus Operations S.A.S.,
Towards an industrial use of FLUCTUAT on safety-critical avionics software David Delmas 1, Eric Goubault 2, Sylvie Putot 2, Jean Souyris 1, Karim Tekkal 3 and Franck Védrine 2 1. Airbus Operations S.A.S.,
A Proposal for Verified Code Generation from Modelica
 A Proposal for Verified Code Generation from Modelica Bernhard Thiele PELAB Linköping University 04. February 2015-9th MODPROD Workshop on Model-Based Product Development 1 / 22 Goals of this presentation
A Proposal for Verified Code Generation from Modelica Bernhard Thiele PELAB Linköping University 04. February 2015-9th MODPROD Workshop on Model-Based Product Development 1 / 22 Goals of this presentation
Industrial Verification Using the KIND Model Checker Lucas Wagner Jedidiah McClurg
 Industrial Verification Using the KIND Model Checker Lucas Wagner Jedidiah McClurg {lgwagner,jrmcclur}@rockwellcollins.com Software Complexity is Becoming Overwhelming Advancements in computing technology
Industrial Verification Using the KIND Model Checker Lucas Wagner Jedidiah McClurg {lgwagner,jrmcclur}@rockwellcollins.com Software Complexity is Becoming Overwhelming Advancements in computing technology
This is an author-deposited version published in: Eprints ID: 10292
 Open Archive Toulouse Archive Ouverte (OATAO) OATAO is an open access repository that collects the work of Toulouse researchers and makes it freely available over the web where possible. This is an author-deposited
Open Archive Toulouse Archive Ouverte (OATAO) OATAO is an open access repository that collects the work of Toulouse researchers and makes it freely available over the web where possible. This is an author-deposited
Gene-Auto development status and support
 Gene-Auto development status and support Andres Toom IB Krates, Estonia 23/09/2009 www.krates.ee Status after the Gene-Auto ITEA project 2 WP2 objectives Toolset architecture definition Achieved Design
Gene-Auto development status and support Andres Toom IB Krates, Estonia 23/09/2009 www.krates.ee Status after the Gene-Auto ITEA project 2 WP2 objectives Toolset architecture definition Achieved Design
Simulink 모델과 C/C++ 코드에대한매스웍스의정형검증툴소개 The MathWorks, Inc. 1
 Simulink 모델과 C/C++ 코드에대한매스웍스의정형검증툴소개 2012 The MathWorks, Inc. 1 Agenda Formal Verification Key concept Applications Verification of designs against (functional) requirements Design error detection Test
Simulink 모델과 C/C++ 코드에대한매스웍스의정형검증툴소개 2012 The MathWorks, Inc. 1 Agenda Formal Verification Key concept Applications Verification of designs against (functional) requirements Design error detection Test
Modeling and Verification of Aircraft Stability Controller
 Modeling and Verification of Aircraft Stability Controller Divya Udayan J Dept. of Internet & Multimedia Konkuk University ABSTRACT Stability control system is one of the most critical systems inside an
Modeling and Verification of Aircraft Stability Controller Divya Udayan J Dept. of Internet & Multimedia Konkuk University ABSTRACT Stability control system is one of the most critical systems inside an
Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018
 Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018 Agenda Motivation Introduction of Safety Components Introduction to ARMv8
Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018 Agenda Motivation Introduction of Safety Components Introduction to ARMv8
Automated Requirements-Based Testing
 Automated Requirements-Based Testing Tuesday, October 7 th 2008 2008 The MathWorks, Inc. Dr. Marc Segelken Senior Application Engineer Overview Purposes of Testing Test Case Generation Structural Testing
Automated Requirements-Based Testing Tuesday, October 7 th 2008 2008 The MathWorks, Inc. Dr. Marc Segelken Senior Application Engineer Overview Purposes of Testing Test Case Generation Structural Testing
A Tabular Expression Toolbox for Matlab/Simulink
 A Tabular Expression Toolbox for Matlab/Simulink Colin Eles and Mark Lawford McMaster Centre for Software Certification McMaster University, Hamilton, Ontario, Canada L8S 4K1 {elesc,lawford}@mcmaster.ca
A Tabular Expression Toolbox for Matlab/Simulink Colin Eles and Mark Lawford McMaster Centre for Software Certification McMaster University, Hamilton, Ontario, Canada L8S 4K1 {elesc,lawford}@mcmaster.ca
Modeling and Simulation for Heterogeneous systems
 Modeling and Simulation for Heterogeneous systems Hosted Simulation for airvehicle subsystem design Henric Andersson Saab Aerosystems 2008-02-06 My background Control engineer from ISY Linköping University
Modeling and Simulation for Heterogeneous systems Hosted Simulation for airvehicle subsystem design Henric Andersson Saab Aerosystems 2008-02-06 My background Control engineer from ISY Linköping University
AUTOBEST: A microkernel-based system (not only) for automotive applications. Marc Bommert, Alexander Züpke, Robert Kaiser.
 for automotive applications. Marc Bommert, Alexander Züpke, Robert Kaiser.") AUTOBEST: A microkernel-based system (not only) for automotive applications Marc Bommert, Alexander Züpke, Robert Kaiser vorname.name@hs-rm.de Outline Motivation AUTOSAR ARINC 653 AUTOBEST Architecture
AUTOBEST: A microkernel-based system (not only) for automotive applications Marc Bommert, Alexander Züpke, Robert Kaiser vorname.name@hs-rm.de Outline Motivation AUTOSAR ARINC 653 AUTOBEST Architecture
Static analysis of concurrent avionics software
 Static analysis of concurrent avionics software with AstréeA Workshop on Static Analysis of Concurrent Software David Delmas Airbus 11 September 2016 Agenda 1 Industrial context Avionics software Formal
Static analysis of concurrent avionics software with AstréeA Workshop on Static Analysis of Concurrent Software David Delmas Airbus 11 September 2016 Agenda 1 Industrial context Avionics software Formal
Automating Best Practices to Improve Design Quality
 Automating Best Practices to Improve Design Quality 임베디드 SW 개발에서의품질확보방안 이제훈차장 2015 The MathWorks, Inc. 1 Key Takeaways Author, manage requirements in Simulink Early verification to find defects sooner
Automating Best Practices to Improve Design Quality 임베디드 SW 개발에서의품질확보방안 이제훈차장 2015 The MathWorks, Inc. 1 Key Takeaways Author, manage requirements in Simulink Early verification to find defects sooner
Embedded software design with Polychrony
 Embedded software design with Polychrony DATE 09 tutorial on Correct-by-Construction Embedded Software Synthesis: Formal Frameworks, Methodologies, and Tools Jean-Pierre Talpin, RIA List of contributors
Embedded software design with Polychrony DATE 09 tutorial on Correct-by-Construction Embedded Software Synthesis: Formal Frameworks, Methodologies, and Tools Jean-Pierre Talpin, RIA List of contributors
ExCuSe A Method for the Model-Based Safety Assessment of Simulink and Stateflow Models
 ExCuSe A Method for the Model-Based Safety Assessment of Simulink and Stateflow Models MATLAB Expo 2018 2018-06-26 München Julian Rhein 1 Outline Introduction Property Proving Application to Safety Assessment
ExCuSe A Method for the Model-Based Safety Assessment of Simulink and Stateflow Models MATLAB Expo 2018 2018-06-26 München Julian Rhein 1 Outline Introduction Property Proving Application to Safety Assessment
Static Analysis of Embedded Systems
 Static Analysis of Embedded Systems Xavier RIVAL rival@di.ens.fr Outline Case study Certification of embedded softwares Demo Static Analysisof Embedded Systems p.2/12 Ariane 5 Flight 501 Ariane 5: sattelite
Static Analysis of Embedded Systems Xavier RIVAL rival@di.ens.fr Outline Case study Certification of embedded softwares Demo Static Analysisof Embedded Systems p.2/12 Ariane 5 Flight 501 Ariane 5: sattelite
Synchronous Kahn Networks (ten years later)
") Synchronous Kahn Networks (ten years later) Marc Pouzet LRI Marc.Pouzet@lri.fr Workshop SYNCHRON, 27/11/06 Overview The origins From Lustre to Lucid Synchrone Developping a Language Conclusion The origins
Synchronous Kahn Networks (ten years later) Marc Pouzet LRI Marc.Pouzet@lri.fr Workshop SYNCHRON, 27/11/06 Overview The origins From Lustre to Lucid Synchrone Developping a Language Conclusion The origins
From Design to Production
 From Design to Production An integrated approach Paolo Fabbri Senior Engineer 2014 The MathWorks, Inc. 1 Do you know what it is? Requirements System Test Functional Spec Integration Test Detailed Design
From Design to Production An integrated approach Paolo Fabbri Senior Engineer 2014 The MathWorks, Inc. 1 Do you know what it is? Requirements System Test Functional Spec Integration Test Detailed Design
Predictable Timing of Cyber-Physical Systems Future Research Challenges
 Predictable Timing of Cyber- Systems Future Research Challenges DREAMS Seminar, EECS, UC Berkeley January 17, 2012 David Broman EECS Department UC Berkeley, USA Department of Computer and Information Science
Predictable Timing of Cyber- Systems Future Research Challenges DREAMS Seminar, EECS, UC Berkeley January 17, 2012 David Broman EECS Department UC Berkeley, USA Department of Computer and Information Science
Synchronous Specification
 Translation Validation for Synchronous Specification in the Signal Compiler Van-Chan Ngo Jean-Pierre Talpin Thierry Gautier INRIA Rennes, France FORTE 2015 Construct a modular translation validationbased
Translation Validation for Synchronous Specification in the Signal Compiler Van-Chan Ngo Jean-Pierre Talpin Thierry Gautier INRIA Rennes, France FORTE 2015 Construct a modular translation validationbased
Standardkonforme Absicherung mit Model-Based Design
 Standardkonforme Absicherung mit Model-Based Design MATLAB EXPO 2014 Dr. Marc Segelken Principal Application Engineer 2014 The MathWorks, Inc. 1 Safety Standards for Embedded Systems IEC 61508 ISO 26262
Standardkonforme Absicherung mit Model-Based Design MATLAB EXPO 2014 Dr. Marc Segelken Principal Application Engineer 2014 The MathWorks, Inc. 1 Safety Standards for Embedded Systems IEC 61508 ISO 26262
SCADE. SCADE Suite Tailored for Critical Applications EMBEDDED SOFTWARE
 EMBEDDED SOFTWARE SCADE SCADE Suite 19.2 SCADE Suite is part of the ANSYS Embedded Software product line, which empowers users with a Model-Based Development Environment for critical embedded software.
EMBEDDED SOFTWARE SCADE SCADE Suite 19.2 SCADE Suite is part of the ANSYS Embedded Software product line, which empowers users with a Model-Based Development Environment for critical embedded software.
Engineering of Reliable Software Systems
 Engineering of Reliable Software Systems Compliance of functional and non functional requirements of embedded bdddsystems by model driven software engineering Dipl.-Ing. Harald Hauff Prof. Dr. Hermann
Engineering of Reliable Software Systems Compliance of functional and non functional requirements of embedded bdddsystems by model driven software engineering Dipl.-Ing. Harald Hauff Prof. Dr. Hermann
Automating Best Practices to Improve Design Quality
 Automating Best Practices to Improve Design Quality Adam Whitmill, Senior Application Engineer 2015 The MathWorks, Inc. 1 Growing Complexity of Embedded Systems Emergency Braking Body Control Module Voice
Automating Best Practices to Improve Design Quality Adam Whitmill, Senior Application Engineer 2015 The MathWorks, Inc. 1 Growing Complexity of Embedded Systems Emergency Braking Body Control Module Voice
ANSYS SCADE 17.0 Solutions for ARINC 661-Compliant Systems
 Technical Data Sheet ANSYS SCADE 17.0 Solutions for Design Environment for Aircraft Manufacturers, CDS and UA Suppliers ANSYS SCADE Solutions for is a tool chain that empowers users to prototype and design
Technical Data Sheet ANSYS SCADE 17.0 Solutions for Design Environment for Aircraft Manufacturers, CDS and UA Suppliers ANSYS SCADE Solutions for is a tool chain that empowers users to prototype and design
Approximate Computing with Runtime Code Generation on Resource-Constrained Embedded Devices
 Approximate Computing with Runtime Code Generation on Resource-Constrained Embedded Devices WAPCO HiPEAC conference 2016 Damien Couroussé Caroline Quéva Henri-Pierre Charles www.cea.fr Univ. Grenoble Alpes,
Approximate Computing with Runtime Code Generation on Resource-Constrained Embedded Devices WAPCO HiPEAC conference 2016 Damien Couroussé Caroline Quéva Henri-Pierre Charles www.cea.fr Univ. Grenoble Alpes,
What s New with the MATLAB and Simulink Product Families. Marta Wilczkowiak & Coorous Mohtadi Application Engineering Group
 What s New with the MATLAB and Simulink Product Families Marta Wilczkowiak & Coorous Mohtadi Application Engineering Group 1 Area MATLAB Math, Statistics, and Optimization Application Deployment Parallel
What s New with the MATLAB and Simulink Product Families Marta Wilczkowiak & Coorous Mohtadi Application Engineering Group 1 Area MATLAB Math, Statistics, and Optimization Application Deployment Parallel
Using Model-Based Design in conformance with safety standards
 Using Model-Based Design in conformance with safety standards MATLAB EXPO 2014 Kristian Lindqvist Senior Engineer 2014 The MathWorks, Inc. 1 High-Integrity Applications Software-based systems that are
Using Model-Based Design in conformance with safety standards MATLAB EXPO 2014 Kristian Lindqvist Senior Engineer 2014 The MathWorks, Inc. 1 High-Integrity Applications Software-based systems that are
Safety Assurance in Software Systems From Airplanes to Atoms
 Safety Assurance in Software Systems From Airplanes to Atoms MDEP Conference on New Reactor Design Activities Session Digital I&C: Current & Emerging Technical Challenges September 07 Dr. Darren Cofer
Safety Assurance in Software Systems From Airplanes to Atoms MDEP Conference on New Reactor Design Activities Session Digital I&C: Current & Emerging Technical Challenges September 07 Dr. Darren Cofer
Automatización de Métodos y Procesos para Mejorar la Calidad del Diseño
 Automatización de Métodos y Procesos para Mejorar la Calidad del Diseño Luis López 2015 The MathWorks, Inc. 1 Growing Complexity of Embedded Systems Emergency Braking Body Control Module Voice Recognition
Automatización de Métodos y Procesos para Mejorar la Calidad del Diseño Luis López 2015 The MathWorks, Inc. 1 Growing Complexity of Embedded Systems Emergency Braking Body Control Module Voice Recognition
REDUCING CERTIFICATION GRANULARITY TO INCREASE ADAPTABILITY OF AVIONICS SOFTWARE
 REDUCING CERTIFICATION GRANULARITY TO INCREASE ADAPTABILITY OF AVIONICS SOFTWARE Martin Rayrole, David Faura, Marc Gatti, Thales Avionics, Meudon la Forêt, France Abstract A strong certification process
REDUCING CERTIFICATION GRANULARITY TO INCREASE ADAPTABILITY OF AVIONICS SOFTWARE Martin Rayrole, David Faura, Marc Gatti, Thales Avionics, Meudon la Forêt, France Abstract A strong certification process
AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel. Alexander Züpke, Marc Bommert, Daniel Lohmann
 AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel Alexander Züpke, Marc Bommert, Daniel Lohmann alexander.zuepke@hs-rm.de, marc.bommert@hs-rm.de, lohmann@cs.fau.de Motivation Automotive and Avionic industry
AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel Alexander Züpke, Marc Bommert, Daniel Lohmann alexander.zuepke@hs-rm.de, marc.bommert@hs-rm.de, lohmann@cs.fau.de Motivation Automotive and Avionic industry
This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No
 This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 643921. TOOLS INTEGRATION UnCoVerCPS toolchain Goran Frehse, UGA Xavier
This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 643921. TOOLS INTEGRATION UnCoVerCPS toolchain Goran Frehse, UGA Xavier
Modular code generation from synchronous models:
 Modular code generation from synchronous models: modularity vs. reusability vs. code size Stavros Tripakis Joint work with Roberto Lublinerman, Penn State CHESS seminar, Berkeley, Feb 2009 1 Semantics-preserving
Modular code generation from synchronous models: modularity vs. reusability vs. code size Stavros Tripakis Joint work with Roberto Lublinerman, Penn State CHESS seminar, Berkeley, Feb 2009 1 Semantics-preserving
INTEGRATING SYSTEM AND SOFTWARE ENGINEERING FOR CERTIFIABLE AVIONICS APPLICATIONS
 INTEGRATING SYSTEM AND SOFTWARE ENGINEERING FOR CERTIFIABLE AVIONICS APPLICATIONS Thierry Le Sergent Mathieu Viala Alain Le Guennec Frédéric Roméas thierry.lesergent@esterel-technologies.com mathieu.viala@esterel-technologies.com
INTEGRATING SYSTEM AND SOFTWARE ENGINEERING FOR CERTIFIABLE AVIONICS APPLICATIONS Thierry Le Sergent Mathieu Viala Alain Le Guennec Frédéric Roméas thierry.lesergent@esterel-technologies.com mathieu.viala@esterel-technologies.com
Verification and Test with Model-Based Design
 Verification and Test with Model-Based Design Flight Software Workshop 2015 Jay Abraham 2015 The MathWorks, Inc. 1 The software development process Develop, iterate and specify requirements Create high
Verification and Test with Model-Based Design Flight Software Workshop 2015 Jay Abraham 2015 The MathWorks, Inc. 1 The software development process Develop, iterate and specify requirements Create high
Institut Supérieur de l Aéronautique et de l Espace. TASTE Multi-core. ISAE / ONERA Jérôme Hugues / Claire Pagetti December 2016
 Institut Supérieur de l Aéronautique et de l Espace TASTE Multi-core ISAE / ONERA Jérôme Hugues / Claire Pagetti December 2016 General information > Duration of the project: 12 months > Consortium» Combined
Institut Supérieur de l Aéronautique et de l Espace TASTE Multi-core ISAE / ONERA Jérôme Hugues / Claire Pagetti December 2016 General information > Duration of the project: 12 months > Consortium» Combined
On the Generation of Test Cases for Embedded Software in Avionics or Overview of CESAR
 1 / 16 On the Generation of Test Cases for Embedded Software in Avionics or Overview of CESAR Philipp Rümmer Oxford University, Computing Laboratory philr@comlab.ox.ac.uk 8th KeY Symposium May 19th 2009
1 / 16 On the Generation of Test Cases for Embedded Software in Avionics or Overview of CESAR Philipp Rümmer Oxford University, Computing Laboratory philr@comlab.ox.ac.uk 8th KeY Symposium May 19th 2009
Testing. Lydie du Bousquet, Ioannis Parissis. TAROT Summer School July (TAROT 2009)
") Testing TAROT Summer School Lustre/SCADE programs 2009 - July 6-10 Lydie du Bousquet, Ioannis Parissis 1 (TAROT 2009) Synchrone Scade/Lustre Siesta Issues 2 Synchronous / safety-critical software control/command
Testing TAROT Summer School Lustre/SCADE programs 2009 - July 6-10 Lydie du Bousquet, Ioannis Parissis 1 (TAROT 2009) Synchrone Scade/Lustre Siesta Issues 2 Synchronous / safety-critical software control/command
SCADE. SCADE 19.2 Solutions for ARINC 661 Compliant Systems. The ARINC 661 Standard EMBEDDED SOFTWARE
 EMBEDDED SOFTWARE SCADE SCADE 19.2 Solutions for ARINC 661 Compliant Systems SCADE Solutions for ARINC 661 Compliant Systems is a simulation toolset that empowers engineers to prototype and design ARINC
EMBEDDED SOFTWARE SCADE SCADE 19.2 Solutions for ARINC 661 Compliant Systems SCADE Solutions for ARINC 661 Compliant Systems is a simulation toolset that empowers engineers to prototype and design ARINC
Memory optimisation in a first-order dataflow synchronous language
 Memory optimisation in a first-order dataflow synchronous language Cédric Pasteur PARKAS team, Laboratoire d Informatique de l Ecole Normale Supérieure, Paris November 29th, 2010 Contents 1. Introduction
Memory optimisation in a first-order dataflow synchronous language Cédric Pasteur PARKAS team, Laboratoire d Informatique de l Ecole Normale Supérieure, Paris November 29th, 2010 Contents 1. Introduction
Using SCADE to Develop Mission-critical High-quality Radar Application Software
 Using SCADE to Develop Mission-critical High-quality Radar Application Software Bernard Dion and Aubanel Monnier Esterel Technologies, Parc Euclide 8 rue Blaise Pascal, F-78990, Elancourt, France bernard.dion@esterel-technologies.com
Using SCADE to Develop Mission-critical High-quality Radar Application Software Bernard Dion and Aubanel Monnier Esterel Technologies, Parc Euclide 8 rue Blaise Pascal, F-78990, Elancourt, France bernard.dion@esterel-technologies.com
Safety Assessment ICAS 2010
 Preliminary Design of Future Reconfigurable IMA Platforms Safety Assessment ICAS 2010 Pierre Bieber, Julien Brunel, Eric Noulard, Claire Pagetti,Thierry Planche, Frédéric Vialard and all the Scarlett partners
Preliminary Design of Future Reconfigurable IMA Platforms Safety Assessment ICAS 2010 Pierre Bieber, Julien Brunel, Eric Noulard, Claire Pagetti,Thierry Planche, Frédéric Vialard and all the Scarlett partners
AADL committee, Valencia October 2 nd, Pierre Dissaux (Ellidiss) Maxime Perrotin (ESA)
 Maxime Perrotin (ESA)") AADL committee, Valencia October 2 nd, 2014 Pierre Dissaux (Ellidiss) Maxime Perrotin (ESA) what is TASTE? A tool-chain targeting heterogeneous, embedded systems, using a model-centric development approach
AADL committee, Valencia October 2 nd, 2014 Pierre Dissaux (Ellidiss) Maxime Perrotin (ESA) what is TASTE? A tool-chain targeting heterogeneous, embedded systems, using a model-centric development approach
COMPLEX EMBEDDED SYSTEMS
 COMPLEX EMBEDDED SYSTEMS Embedded System Design and Architectures Summer Semester 2012 System and Software Engineering Prof. Dr.-Ing. Armin Zimmermann Contents System Design Phases Architecture of Embedded
COMPLEX EMBEDDED SYSTEMS Embedded System Design and Architectures Summer Semester 2012 System and Software Engineering Prof. Dr.-Ing. Armin Zimmermann Contents System Design Phases Architecture of Embedded
Self-optimisation using runtime code generation for Wireless Sensor Networks
 Self-optimisation using runtime code generation for Wireless Sensor Networks ComNet-IoT Workshop ICDCN 16 Singapore Caroline Quéva Damien Couroussé Henri-Pierre Charles www.cea.fr Univ. Grenoble Alpes,
Self-optimisation using runtime code generation for Wireless Sensor Networks ComNet-IoT Workshop ICDCN 16 Singapore Caroline Quéva Damien Couroussé Henri-Pierre Charles www.cea.fr Univ. Grenoble Alpes,
FPGAs in radiation-harsh environments
 FPGAs in radiation-harsh environments 1 Application examples AFDX Used on new commercial aircrafts from Boeing and Airbus Main communication interface Safety level up to DAL-A Mission computers Used on
FPGAs in radiation-harsh environments 1 Application examples AFDX Used on new commercial aircrafts from Boeing and Airbus Main communication interface Safety level up to DAL-A Mission computers Used on
Analyse statique de programmes avioniques
 June 28th 2013. Forum Méthodes Formelles Cycle de conférences: Analyse Statique : «Retour d expériences industrielles» Analyse statique de programmes avioniques Presenté par Jean Souyris (Airbus Opérations
June 28th 2013. Forum Méthodes Formelles Cycle de conférences: Analyse Statique : «Retour d expériences industrielles» Analyse statique de programmes avioniques Presenté par Jean Souyris (Airbus Opérations
SCADE S E M I N A R I N S O F T W A R E E N G I N E E R I N G P R E S E N T E R A V N E R B A R R
 SCADE 1 S E M I N A R I N S O F T W A R E E N G I N E E R I N G P R E S E N T E R A V N E R B A R R What is SCADE? Introduction 2 Software Critical Application Development Environment, a Lustrebased IDE
SCADE 1 S E M I N A R I N S O F T W A R E E N G I N E E R I N G P R E S E N T E R A V N E R B A R R What is SCADE? Introduction 2 Software Critical Application Development Environment, a Lustrebased IDE
SCAlable & ReconfigurabLe Electronics platforms and Tools SCARLETT
 SCAlable & ReconfigurabLe Electronics platforms and Tools SCARLETT From the Integrated Modular Avionics the First Generation architecture to the Distributed Modular Electronics solution Page 1 Collaborative
SCAlable & ReconfigurabLe Electronics platforms and Tools SCARLETT From the Integrated Modular Avionics the First Generation architecture to the Distributed Modular Electronics solution Page 1 Collaborative
Model-based Architectural Verification & Validation
 Model-based Architectural Verification & Validation Software Engineering Institute Carnegie Mellon University Pittsburgh, PA 15213 Peter H Feiler Feb. 2009 2006 Carnegie Mellon University Outline Architecture-Centric
Model-based Architectural Verification & Validation Software Engineering Institute Carnegie Mellon University Pittsburgh, PA 15213 Peter H Feiler Feb. 2009 2006 Carnegie Mellon University Outline Architecture-Centric
S100 Series. Compact Smart Camera. High Performance: Dual Core Cortex-A9 processor and Xilinx FPGA. acquisition and preprocessing
 S100 Series Compact Smart Camera High Performance: Dual Core Cortex-A9 processor and Xilinx FPGA IP-67 Rated enclosure Programmable FPGA for image acquisition and preprocessing Multiple resolution: VGA,
S100 Series Compact Smart Camera High Performance: Dual Core Cortex-A9 processor and Xilinx FPGA IP-67 Rated enclosure Programmable FPGA for image acquisition and preprocessing Multiple resolution: VGA,
Programming Languages for Real-Time Systems. LS 12, TU Dortmund
 Programming Languages for Real-Time Systems Prof. Dr. Jian-Jia Chen LS 12, TU Dortmund 20 June 2016 Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 41 References Slides are based on Prof. Wang Yi, Prof.
Programming Languages for Real-Time Systems Prof. Dr. Jian-Jia Chen LS 12, TU Dortmund 20 June 2016 Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 41 References Slides are based on Prof. Wang Yi, Prof.
Development and Deployment of ECU based Control Systems through MBD. Imperative role of Model based design in System Engineering
 Development and Deployment of ECU based Control Systems through MBD Imperative role of Model based design in System Engineering Outline Scope of Work Problem Definition Solution System Engineering Model
Development and Deployment of ECU based Control Systems through MBD Imperative role of Model based design in System Engineering Outline Scope of Work Problem Definition Solution System Engineering Model
Certification Authorities Software Team (CAST) Position Paper CAST-25
 Position Paper CAST-25") Certification Authorities Software Team (CAST) Position Paper CAST-25 CONSIDERATIONS WHEN USING A QUALIFIABLE DEVELOPMENT ENVIRONMENT (QDE) IN CERTIFICATION PROJECTS COMPLETED SEPTEMBER 2005 (Rev 0) NOTE:
Certification Authorities Software Team (CAST) Position Paper CAST-25 CONSIDERATIONS WHEN USING A QUALIFIABLE DEVELOPMENT ENVIRONMENT (QDE) IN CERTIFICATION PROJECTS COMPLETED SEPTEMBER 2005 (Rev 0) NOTE:
Architecture-driven development of Climate Control Software LMS Imagine.Lab Embedded Software Designer Siemens DF PL
 Architecture-driven development of Climate Control Software LMS Imagine.Lab Embedded Software Designer Siemens DF PL Restricted Siemens AG 2017 Realize innovation. Content 1 Overview 3 2 LMS Imagine.Lab
Architecture-driven development of Climate Control Software LMS Imagine.Lab Embedded Software Designer Siemens DF PL Restricted Siemens AG 2017 Realize innovation. Content 1 Overview 3 2 LMS Imagine.Lab
Off-line (Optimal) Multiprocessor Scheduling of Dependent Periodic Tasks
 Multiprocessor Scheduling of Dependent Periodic Tasks") Off-line (Optimal) Multiprocessor Scheduling of Dependent Periodic Tasks Julie Barot, Frédéric Boniol, Mikel Cordovilla, Eric Noulard, Claire Pagetti ONERA, Toulouse, France SAC 2012 March, 27th 2012 1
Off-line (Optimal) Multiprocessor Scheduling of Dependent Periodic Tasks Julie Barot, Frédéric Boniol, Mikel Cordovilla, Eric Noulard, Claire Pagetti ONERA, Toulouse, France SAC 2012 March, 27th 2012 1
Fall 2014 SEI Research Review Verifying Evolving Software
 Fall 2014 SEI Research Review Verifying Evolving Software Software Engineering Institute Carnegie Mellon University Pittsburgh, PA 15213 Arie Gurfinkel October 28, 2014 Report Documentation Page Form Approved
Fall 2014 SEI Research Review Verifying Evolving Software Software Engineering Institute Carnegie Mellon University Pittsburgh, PA 15213 Arie Gurfinkel October 28, 2014 Report Documentation Page Form Approved
SCADE. SCADE Architect System Requirements Analysis EMBEDDED SOFTWARE
 EMBEDDED SOFTWARE SCADE SCADE Architect 19.2 SCADE Architect is part of the ANSYS Embedded Software family of products and solutions, which gives you a design environment for systems with high dependability
EMBEDDED SOFTWARE SCADE SCADE Architect 19.2 SCADE Architect is part of the ANSYS Embedded Software family of products and solutions, which gives you a design environment for systems with high dependability
An Eect Type System for Modular Distribution of Dataow Programs
 An Eect Type System for Modular Distribution of Dataow Programs Gwenaël Delaval 1 Alain Girault 1 Marc Pouzet 2 P P 1 INRIA Rhône-Alpes, Pop-Art project ART 2 LRI, Demons team June 13, 2008 LCTES, Tucson,
An Eect Type System for Modular Distribution of Dataow Programs Gwenaël Delaval 1 Alain Girault 1 Marc Pouzet 2 P P 1 INRIA Rhône-Alpes, Pop-Art project ART 2 LRI, Demons team June 13, 2008 LCTES, Tucson,
HARDWARE GUIDE. Water Loop Controller C1000 Series. Specifications and Operational Guide
 HARDWARE GUIDE Water Loop Controller C1000 Series Specifications and Operational Guide www.proloncontrols.com info@proloncontrols.com 17 510, rue Charles, Suite 100, Mirabel, QC, J7J 1X9 REV. 6.1.6 PL-HRDW-WLC-C1000-C/F-EN
HARDWARE GUIDE Water Loop Controller C1000 Series Specifications and Operational Guide www.proloncontrols.com info@proloncontrols.com 17 510, rue Charles, Suite 100, Mirabel, QC, J7J 1X9 REV. 6.1.6 PL-HRDW-WLC-C1000-C/F-EN
Automatic Architecture Hardening Using Safety Patterns
 Automatic Architecture Hardening Using Safety Patterns November 4, 2014 Authors: Kevin Delmas, Rémi Delmas, Claire Pagetti e-mail: prenom.nom@onera.fr 1 / 29 Context Application The typical application
Automatic Architecture Hardening Using Safety Patterns November 4, 2014 Authors: Kevin Delmas, Rémi Delmas, Claire Pagetti e-mail: prenom.nom@onera.fr 1 / 29 Context Application The typical application
Verification and Validation of High-Integrity Systems
 Verification and Validation of High-Integrity Systems Chethan CU, MathWorks Vaishnavi HR, MathWorks 2015 The MathWorks, Inc. 1 Growing Complexity of Embedded Systems Emergency Braking Body Control Module
Verification and Validation of High-Integrity Systems Chethan CU, MathWorks Vaishnavi HR, MathWorks 2015 The MathWorks, Inc. 1 Growing Complexity of Embedded Systems Emergency Braking Body Control Module
Verification, Validation, and Test with Model-Based Design
 2008-01-2709 Verification, Validation, and Test with Model-Based Design Copyright 2008 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Mirko Conrad The MathWorks, Inc. ABSTRACT Model-Based Design with
2008-01-2709 Verification, Validation, and Test with Model-Based Design Copyright 2008 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Mirko Conrad The MathWorks, Inc. ABSTRACT Model-Based Design with
Turning proof assistants into programming assistants
 Turning proof assistants into programming assistants ST Winter Meeting, 3 Feb 2015 Magnus Myréen Why? Why combine proof- and programming assistants? Why proofs? Testing cannot show absence of bugs. Some
Turning proof assistants into programming assistants ST Winter Meeting, 3 Feb 2015 Magnus Myréen Why? Why combine proof- and programming assistants? Why proofs? Testing cannot show absence of bugs. Some
Automatic Code Generation Technology Adoption Lessons Learned from Commercial Vehicle Case Studies
 08AE-22 Automatic Code Generation Technology Adoption Lessons Learned from Commercial Vehicle Case Studies Copyright 2007 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Scott Breiner John Deere ABSTRACT
08AE-22 Automatic Code Generation Technology Adoption Lessons Learned from Commercial Vehicle Case Studies Copyright 2007 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Scott Breiner John Deere ABSTRACT
Material: Weight: Bearing Life: Shaft Speed: Shaft Loads: Shock: Vibration: Bump:
 Encoder Description EXAG SSI / Hollow Shaft EXAG SSI Hollow Shaft Encoder - Ø 78 mm Hollow Bore: Ø 14 mm and Ø 16 mm Synchronous Serial Interface (SSI) (RS422/TTL) Resolution up to 30 bits for on-site
Encoder Description EXAG SSI / Hollow Shaft EXAG SSI Hollow Shaft Encoder - Ø 78 mm Hollow Bore: Ø 14 mm and Ø 16 mm Synchronous Serial Interface (SSI) (RS422/TTL) Resolution up to 30 bits for on-site
Hardware Design of a Flight Control Computer System based on Multi-core Digital Signal Processor and Field Programmable Gate Array
 Article Hardware Design of a Flight Control Computer System based on Multi-core Digital Signal Processor and Field Programmable Gate Array Francisco Bilendo 1 ; *francisco-bilendo@hotmail.com Sheng Shouzhao
Article Hardware Design of a Flight Control Computer System based on Multi-core Digital Signal Processor and Field Programmable Gate Array Francisco Bilendo 1 ; *francisco-bilendo@hotmail.com Sheng Shouzhao
FUNCTIONAL SAFETY FOR INDUSTRIAL AUTOMATION
 FUNCTIONAL SAFETY FOR INDUSTRIAL AUTOMATION 2017.11 The term Functional Safety has become a topic of great interest. Functional Safety generally means that malfunctions of the operating systems or applications
FUNCTIONAL SAFETY FOR INDUSTRIAL AUTOMATION 2017.11 The term Functional Safety has become a topic of great interest. Functional Safety generally means that malfunctions of the operating systems or applications
Sensors & Transducers 2015 by IFSA Publishing, S. L.
 Sensors & Transducers 205 by IFSA Publishing, S. L. http://www.sensorsportal.com The Development of Synchronization Function for Triple Redundancy System Based on SCADE Moupeng, 2 Duan Xiaojun AVIC Chengdu
Sensors & Transducers 205 by IFSA Publishing, S. L. http://www.sensorsportal.com The Development of Synchronization Function for Triple Redundancy System Based on SCADE Moupeng, 2 Duan Xiaojun AVIC Chengdu
Hiperface DSL Combined with Safety
 International TÜV Rheinland Symposium in China Functional Safety in Industrial Applications 18 19 October 2011, Shanghai - China Hiperface DSL Combined with Safety 1 Safety Implementation Hiperface DSL
International TÜV Rheinland Symposium in China Functional Safety in Industrial Applications 18 19 October 2011, Shanghai - China Hiperface DSL Combined with Safety 1 Safety Implementation Hiperface DSL
M&S-based Triple Redundant FLCC Rapid Prototype Development
 M&S-based Triple Redundant FLCC Rapid Prototype Development Jong-Min Ahn, Sr. researcher; *Dae-Beom Seung, principal eng.; Jong-Kwang Kwon, Sr. researcher; Dr. Joon-Soo Ko, project manager Test Bed Aircraft
M&S-based Triple Redundant FLCC Rapid Prototype Development Jong-Min Ahn, Sr. researcher; *Dae-Beom Seung, principal eng.; Jong-Kwang Kwon, Sr. researcher; Dr. Joon-Soo Ko, project manager Test Bed Aircraft
Visual tools to select a layout for an adapted living area
 Visual tools to select a layout for an adapted living area Sébastien AUPETIT, Arnaud PURET, Pierre GAUCHER, Nicolas MONMARCHÉ and Mohamed SLIMANE Université François Rabelais Tours, Laboratoire d Informatique,
Visual tools to select a layout for an adapted living area Sébastien AUPETIT, Arnaud PURET, Pierre GAUCHER, Nicolas MONMARCHÉ and Mohamed SLIMANE Université François Rabelais Tours, Laboratoire d Informatique,
Basic Components of Digital Computer
 Digital Integrated Circuits & Microcontrollers Sl. Mihnea UDREA, mihnea@comm.pub.ro Conf. Mihai i STANCIU, ms@elcom.pub.ro 1 Basic Components of Digital Computer CPU (Central Processing Unit) Control and
Digital Integrated Circuits & Microcontrollers Sl. Mihnea UDREA, mihnea@comm.pub.ro Conf. Mihai i STANCIU, ms@elcom.pub.ro 1 Basic Components of Digital Computer CPU (Central Processing Unit) Control and
Quality-of-Service Modeling and Analysis of Dependable Aplication Models
 Quality-of-Service Modeling and Analysis of Dependable Aplication Models András Balogh András Pataricza BUTE-DMIS-FTSRG http://www.decos.at/ 2 Outline Introduction Target application domains Application
Quality-of-Service Modeling and Analysis of Dependable Aplication Models András Balogh András Pataricza BUTE-DMIS-FTSRG http://www.decos.at/ 2 Outline Introduction Target application domains Application
Test and Evaluation of Autonomous Systems in a Model Based Engineering Context
 Test and Evaluation of Autonomous Systems in a Model Based Engineering Context Raytheon Michael Nolan USAF AFRL Aaron Fifarek Jonathan Hoffman 3 March 2016 Copyright 2016. Unpublished Work. Raytheon Company.
Test and Evaluation of Autonomous Systems in a Model Based Engineering Context Raytheon Michael Nolan USAF AFRL Aaron Fifarek Jonathan Hoffman 3 March 2016 Copyright 2016. Unpublished Work. Raytheon Company.
Esterel Studio Update
 Esterel Studio Update Kim Sunesen Esterel EDA Technologies www.esterel-eda.com Synchron, November 2007, Bamberg Germany Agenda Update on Esterel Studio Architecture Diagrams Formal Verification IEEE standardization
Esterel Studio Update Kim Sunesen Esterel EDA Technologies www.esterel-eda.com Synchron, November 2007, Bamberg Germany Agenda Update on Esterel Studio Architecture Diagrams Formal Verification IEEE standardization
Modelling Security in UML/OCL for C2IS
 Modelling Security in UML/OCL for C2IS Robert Charpentier & Martin Salois R et D pour la défense Canada Defence R&D Canada Canada Plan Motivation & Objectives Software Certification Techniques Modelling
Modelling Security in UML/OCL for C2IS Robert Charpentier & Martin Salois R et D pour la défense Canada Defence R&D Canada Canada Plan Motivation & Objectives Software Certification Techniques Modelling
Compositional Translation of Simulink Models into Synchronous BIP
 Compositional Translation of Simulink Models into Synchronous BIP Vassiliki Sfyrla, Georgios Tsiligiannis, Iris Safaka, Marius Bozga, Joseph Sifakis To cite this version: Vassiliki Sfyrla, Georgios Tsiligiannis,
Compositional Translation of Simulink Models into Synchronous BIP Vassiliki Sfyrla, Georgios Tsiligiannis, Iris Safaka, Marius Bozga, Joseph Sifakis To cite this version: Vassiliki Sfyrla, Georgios Tsiligiannis,
Orccad, a Model Driven Architecture and Environment for Real-Time Control. Soraya Arias Florine Boudin Roger Pissard-Gibollet Daniel Simon
 1 Orccad, a Model Driven Architecture and Environment for Real-Time Control Soraya Arias Florine Boudin Roger Pissard-Gibollet Daniel Simon 2 Orccad : status and motivations Model: Control design oriented
1 Orccad, a Model Driven Architecture and Environment for Real-Time Control Soraya Arias Florine Boudin Roger Pissard-Gibollet Daniel Simon 2 Orccad : status and motivations Model: Control design oriented
Compilation TP 0.0 : The target architecture: Digmips
 Compilation TP 0.0 : The target architecture: Digmips C. Alias & G. Iooss The goal of these TPs is to construct a C compiler for Digmips, a small MIPS processor implemented using the Diglog logic simulation
Compilation TP 0.0 : The target architecture: Digmips C. Alias & G. Iooss The goal of these TPs is to construct a C compiler for Digmips, a small MIPS processor implemented using the Diglog logic simulation
PITOT / STATIC TESTER
 PITOT / STATIC TESTER ADSE 7XX range For all aircrafts Edition 01 (0803121514) PITOT / STATIC TESTER For Laboratory and workshop RVSM Pitot / Static Indicator Replace mercury column ADSE 730 RVSM Pitot
PITOT / STATIC TESTER ADSE 7XX range For all aircrafts Edition 01 (0803121514) PITOT / STATIC TESTER For Laboratory and workshop RVSM Pitot / Static Indicator Replace mercury column ADSE 730 RVSM Pitot
Institut Supérieur de l Aéronautique et de l Espace Ocarina: update and future directions
 Institut Supérieur de l Aéronautique et de l Espace Ocarina: update and future directions Jérôme Hugues, ISAE/DMIA jerome.hugues@isae.fr Ocarina story 2004: ESA promoted the use of AADL 1.0 in the context
Institut Supérieur de l Aéronautique et de l Espace Ocarina: update and future directions Jérôme Hugues, ISAE/DMIA jerome.hugues@isae.fr Ocarina story 2004: ESA promoted the use of AADL 1.0 in the context
FPGA for Software Engineers
 FPGA for Software Engineers Course Description This course closes the gap between hardware and software engineers by providing the software engineer all the necessary FPGA concepts and terms. The course
FPGA for Software Engineers Course Description This course closes the gap between hardware and software engineers by providing the software engineer all the necessary FPGA concepts and terms. The course
Guidelines for deployment of MathWorks R2010a toolset within a DO-178B-compliant process
 Guidelines for deployment of MathWorks R2010a toolset within a DO-178B-compliant process UK MathWorks Aerospace & Defence Industry Working Group Guidelines for deployment of MathWorks R2010a toolset within
Guidelines for deployment of MathWorks R2010a toolset within a DO-178B-compliant process UK MathWorks Aerospace & Defence Industry Working Group Guidelines for deployment of MathWorks R2010a toolset within
Tsmart-BIPEX: An Integrated Graphical Design Toolkit for Software Systems
 Tsmart-BIPEX: An Integrated Graphical Design Toolkit for Software Systems Huafeng Zhang 1, Yu Jiang 1, Han Liu 1, Ming Gu 1, and Jiaguang Sun 1 School of Software, Tsinghua University, China Abstract.
Tsmart-BIPEX: An Integrated Graphical Design Toolkit for Software Systems Huafeng Zhang 1, Yu Jiang 1, Han Liu 1, Ming Gu 1, and Jiaguang Sun 1 School of Software, Tsinghua University, China Abstract.
StackAnalyzer Proving the Absence of Stack Overflows
 StackAnalyzer Proving the Absence of Stack Overflows AbsInt GmbH 2012 2 Functional Safety Demonstration of functional correctness Well-defined criteria Automated and/or model-based testing Formal techniques:
StackAnalyzer Proving the Absence of Stack Overflows AbsInt GmbH 2012 2 Functional Safety Demonstration of functional correctness Well-defined criteria Automated and/or model-based testing Formal techniques:
Model Checking of Aerospace Domain Models in an Industrial Context
 Model Checking of Aerospace Domain Models in an Industrial Context Michael Dierkes Rockwell Collins France Forum Méthodes Formelles 16 Octobre 2014 Proprietary Information Agenda 1.Presentation of Rockwell
Model Checking of Aerospace Domain Models in an Industrial Context Michael Dierkes Rockwell Collins France Forum Méthodes Formelles 16 Octobre 2014 Proprietary Information Agenda 1.Presentation of Rockwell
Reconfiguration as a mean to enhance platform availability
 SCAlable & ReconfigurabLe Electronics platforms and Tools - Towards the next generation of Integrated Modular Avionics Reconfiguration as a mean to enhance platform availability Workshop APRES 2009 Pierre
SCAlable & ReconfigurabLe Electronics platforms and Tools - Towards the next generation of Integrated Modular Avionics Reconfiguration as a mean to enhance platform availability Workshop APRES 2009 Pierre
Embedded Systems. 2. Software Development. Lothar Thiele. Computer Engineering and Networks Laboratory
 Embedded Systems 2. Software Development Lothar Thiele Computer Engineering and Networks Laboratory Remember: Computer Engineering I Compilation of a C program to machine language program: textual representation
Embedded Systems 2. Software Development Lothar Thiele Computer Engineering and Networks Laboratory Remember: Computer Engineering I Compilation of a C program to machine language program: textual representation
From Analysis to Code Generation of Distributed Systems with a UML-Based Formal Environment Named TURTLE 2005
 From Analysis to Code Generation of Distributed Systems with a UML-Based Formal Environment Named TURTLE 2005 Ludovic Apvrille ludovic.apvrille@enst.fr Eurecom, Office 223 Ludovic Apvrille - October 12,
From Analysis to Code Generation of Distributed Systems with a UML-Based Formal Environment Named TURTLE 2005 Ludovic Apvrille ludovic.apvrille@enst.fr Eurecom, Office 223 Ludovic Apvrille - October 12,
Taking the Right Turn with Safe and Modular Solutions for the Automotive Industry
 Taking the Right Turn with Safe and Modular Solutions for the Automotive Industry A Time-Triggered Middleware for Safety- Critical Automotive Applications Ayhan Mehmet, Maximilian Rosenblattl, Wilfried
Taking the Right Turn with Safe and Modular Solutions for the Automotive Industry A Time-Triggered Middleware for Safety- Critical Automotive Applications Ayhan Mehmet, Maximilian Rosenblattl, Wilfried