Digital Signal Processing and Applications with the TMS320C6713 DSK
|
|
|
- Scott Sharp
- 6 years ago
- Views:
Transcription


1 Digital Signal Processing and Applications with the TMS320C6713 DSK Day 2 D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu October 15-16,

2 Matlab s Link for Code Composer Studio Yesterday we used Matlab to design an FIR filter. The Link for Code Composer Studio toolbox allows even more direct Matlab-CCS integration. Page 2 of 54
3 Getting Started with Matlab s Link for CCS % make sure DSK is connected to the computer via USB % and is on before proceeding % display a list of available DSP boards and processors ccsboardinfo % create Matlab/CCS link for board=0, processor=0 cc = ccsdsp( boardnum,0, procnum,0); % get information about the status and capabilities of the link display(cc) info(cc) isrunning(cc) isrtdxcapable(cc) getproc(cc) % make CCS visible visible(cc,1) Page 3 of 54
4 Opening, building, loading, and running a project % open existing project cd(cc, c:\myproject\helloworld ); open(cc, helloworld.pjt ); % build the project (returns a value of 1 if successful) build(cc, all ) % load the binary file to the DSK load(cc, Debug\helloworld.out ) % run the code on the DSK and check to see if it is running restart(cc) run(cc) isrunning(cc) % halt execution on the DSK and check to see if it stopped halt(cc) isrunning(cc) Page 4 of 54
5 Reading/Writing DSK Variables Uint32 temp; short foo[100]; (variables declared in CCS) % Important: Do not attempt to read/write data from/to the DSK while it is running. % Insert one or more breakpoints in the code, run to the breakpoint, % perform the read, then resume execution % confirm the DSK is not running isrunning(cc) % create an object for the DSK variables temp and foo (can be global or local) tempobj = createobj(cc, temp ); fooobj = createobj(cc, foo ); % read/write examples x = read(tempobj) write(tempobj,1234) y = read(cc,fooobj) z = read(cc,fooobj,10) write(fooobj,4,999) % DSK temp -> Matlab x % > DSK temp % DSK foo -> Matlab y (whole array) % DSK foo -> Matlab y (10th element) % 999 -> DSK foo (4th element) Page 5 of 54
6 Cool things that you can do with Matlab s Link for CCS 1. Rapid filter design: Halt execution on the DSK (halt), write new filter coefficients (write), resume execution (restart/run), and test your filter without rebuilding the project. 2. Use specific test signals: Generate a specific test signal in Matlab, overwrite the codec samples (write) with your test signal samples, run the processing code on the DSK, observe the output. 3. Rapid data analysis/graphing: Read the contents of the a filter output (read) to Matlab, analyze the spectrum or other properties, generate plots. Page 6 of 54
7 Tip: Making Interesting Test Signals in Matlab Example: In-Phase and Quadrature Sinusoids >> fs=44100; % set up sampling frequency >> t=0:1/fs:5; % time vector (5 seconds long) >> x=[sin(2*pi*1000*t ) cos(2*pi*1000*t )]; % left = sin, right = cos >> soundsc(x,fs); % play sound through sound card Another example: white noise (in stereo) >> L=length(t); >> x=[randn(l,1) randn(l,1)]; >> soundsc(x,fs); % play sound through sound card These signals are all generated as double precision floats but can be cast to fixed point or integer formats if necessary. You can save your signals to.wav files with Matlab s wavwrite function. These.wav files can be burned to CD and played with conventional stereo equipment. Page 7 of 54
8 Some Things to Try Try out some of the basic functions of Matlab s Link for CCS Establish a link from Matlab to CCS Open your FIR filter project from yesterday. Build, load, run, and halt it. Set breakpoints. Read and write global/local variables. Try rapid filter design: While your code is running, generate new filter coefficients in Matlab using FDA tool, e.g. try a bandstop filter Halt code execution Change the filter coefficients in the DSK memory (write function in Matlab) Resume code execution Test the frequency response to see if it changed Page 8 of 54
9 Profiling Your Code and Making it More Efficient How to estimate the execution time of your code. How to use the optimizing compiler to produce more efficient code. How data types and memory usage affect the efficiency of your code. Page 9 of 54
10 How to estimate code execution time when connected to the DSK 1. Start CCS with the C6713 DSK connected 2. Debug -> Connect (or alt+c) 3. Open project, build it, and load.out file to the DSK 4. Open the source file you wish to profile 5. Set two breakpoints for the start/end of the code range you wish to profile 6. Profile -> Clock -> Enable 7. Profile -> Clock -> View 8. Run to the first breakpoint 9. Reset the clock 10. Run to the second breakpoint 11. Clock will show raw number of execution cycles between breakpoints. Tip: You can save your breakpoints, probe points, graphs, and watch windows with File -> Workspace -> Save Workspace As Page 10 of 54

11 Another method for estimating code execution time (part 1 of 3) Repeat steps 1-4 previous method. 5. Clear any breakpoints in your code 6. Profile -> Setup 7. Click on Custom tab 8. Select Cycles 9. Click on clock (enable profiling) Page 11 of 54
 12.")
12 Another method for estimating code execution time (part 2 of 3) 10. Select Ranges tab 11. Highlight code you want to profile and drag into ranges window (hint: you can drag whole functions into this window) 12. Repeat for other ranges if desired Page 12 of 54
 15. Halt 16.")
13 Another method for estimating code execution time (part 3 of 3) 13. Profile -> Viewer 14. Run (let it run for a minute or more) 15. Halt 16. Observe profiling results in Profile Viewer window Hint: edit the columns to see averages Page 13 of 54
14 What does it mean? Access count is the number of times that CCS profiled the function Note that the function was probably called more than 49 times. CCS only timed it 49 times. Inclusive average is the average number of cycles needed to run the function including any calls to subroutines Exclusive average is the average number of cycles needed to run the function excluding any calls to subroutines Page 14 of 54


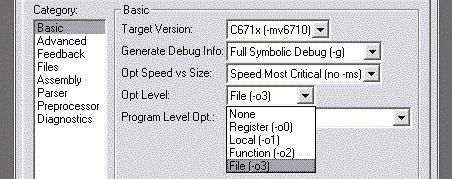
15 Optimizing Compiler Page 15 of 54
16 Profiling results after compiler optimization In this example, we get a 3x-4x improvement with Speed Most Critical and File (-o3) optimization Optimization gains can be much larger, e.g. 20x Page 16 of 54
17 Limitations of hardware profiling Breakpoint/clock profiling method may not work with compiler-optimized code Profile -> View method is known to be somewhat inaccurate when connected to real hardware (see profiling limitations in CCS help) Accuracy is better when only one or two ranges are profiled Best accuracy is achieved by running a simulator Page 17 of 54
18 Other factors affecting code efficiency Memory C6713 has 64kB internal ram (L2 cache) DSK provides additional 16MB external RAM (SDRAM) Code location (.text in command file) internal memory (fast) external memory (slow, typically 2-4x worse) Data location (.data in command file) internal memory (fast) external memory (slow, depends on datatypes) Data types Slowest execution is double-precision floating point Fastest execution is fixed point, e.g. short Page 18 of 54
19 Command file example MEMORY { vecs: o = h l = h IRAM: o = h l = 0000FE00h CE0: o = h l = h } SECTIONS { "vectors" > vecs.cinit > IRAM.text > IRAM.stack > IRAM.bss > IRAM.const > IRAM.data > IRAM.far > IRAM.switch > IRAM.sysmem > IRAM.tables > IRAM.cio > IRAM } Code goes here Data goes here Addresses FFFF are mapped to internal memory (IRAM). This is 64kB. External memory (CE0) is mapped to address range FFFFFF. This is 16MB. Page 19 of 54
20 Page 20 of 54
21 Some Things to Try Try profiling parts of your FIR filter code from Day 1 without optimization. Try both profiling methods. Rebuild your project under various optimization levels and try various settings from size most critical to speed most critical. Compare profile results for no optimization and various levels of optimization. Change the data types in your FIR filter code and rebuild (with and without optimization) to see the effect on performance. Try moving the data and/or program to internal/external memory and profiling (you will need to modify the linker command file to do this) Contest: Who can make the most efficient 8th order bandpass filter (that works)? Page 21 of 54
22 Assembly Language Programming on the TMS320C6713 Sometimes you have to take matters into your own hands... Three options: 1. Linear assembly (.sa) Compromise between effort and efficiency Typically more efficient than C Assembler takes care of details like assigning functional units, registers, and parallelizing instructions 2. ASM statement in C code (.c) asm( assembly code ) 3. C-callable assembly function (.asm) Full control of assigning functional units, registers, parallelization, and pipeline optimization Page 22 of 54
23 C-Callable Assembly Language Functions Basic concepts: Arguments are passed in via registers A4, B4, A6, B6,... in that order. All registers are 32-bit. Result returned in A4 also. Return address of calling code (program counter) is in B3. Don t overwrite B3! Naming conventions: In C code: label In ASM code: _label (note the leading underbar) Accessing global variables in ASM:.ref _variablename Page 23 of 54
24 Skeleton C-Callable ASM Function ; header comments ; passed in parameters in registers A4, B4, A6,... in that order.def _myfunc ; allow calls from external ACONSTANT.equ 100 ; declare constants.ref _aglobalvariable ; refer to a global variable _myfunc: NOP ; instructions go here B B3 ; return (branch to addr B3) ; function output will be in A4 NOP 5 ; pipeline flush.end Page 24 of 54

25 Example C-Callable Assembly Language Program Page 25 of 54

26 TMS320C67x Block Diagram One instruction is 32 bits. Program bus is 256 bits wide. Can execute up to 8 instructions per clock cycle (225MHz->4.4ns clock cycle). 8 independent functional units: - 2 multipliers - 6 ALUs Code is efficient if all 8 functional units are always busy. Register files each have 16 general purpose registers, each 32-bits wide (A0-A15, B0-B15). Data paths are each 64 bits wide. Page 26 of 54
27 C6713 Functional Units Two data paths (A & B) Data path A Multiply operations (.M1) Logical and arithmetic operations (.L1) Branch, bit manipulation, and arithmetic operations (.S1) Loading/storing and arithmetic operations (.D1) Data path B Multiply operations (.M2) Logical and arithmetic operations (.L2) Branch, bit manipulation, and arithmetic operations (.S2) Loading/storing and arithmetic operations (.D2) All data (not program) transfers go through.d1 and.d2 Page 27 of 54
28 Fetch & Execute Packets C6713 fetches 8 instructions at a time (256 bits) Definition: Fetch packet is a group of 8 instructions fetched at once. Coincidentally, C6713 has 8 functional units. Ideally, all 8 instructions would be executed in parallel. Often this isn t possible, e.g.: 3 multiplies (only two.m functional units) Results of instruction 3 needed by instruction 4 (must wait for 3 to complete) Page 28 of 54
29 Execute Packets Definition: Execute Packet is a group of (8 or less) consecutive instructions in one fetch packet that can be executed in parallel. fetch packet execute packet 1 execute packet 2 execute packet 3 C compiler provides a flag to indicate which instructions should be run in parallel. You have to do this manually in Assembly using. See Chapter 3 of the Chassaing textbook. Page 29 of 54
30 C6713 Instruction Pipeline Overview All instructions flow through the following steps: 1. Fetch a) PG: Program address Generate b) PS: Program address Send c) PW: Program address ready Wait d) PR: Program fetch packet Receive 2. Decode a) DP: Instruction DisPatch b) DC: Instruction DeCode 3. Execute a) 10 phases labeled E1-E10 b) Fixed point processors have only 5 phases (E1-E5) each step = 1 clock cycle Page 30 of 54
 in the pipeline in this example Page 31 of 54")
31 Pipelining: Ideal Operation Remarks: At clock cycle 11, the pipeline is full There are no holes ( bubbles ) in the pipeline in this example Page 31 of 54

32 Pipelining: Actual Operation Remarks: Fetch packet n has 3 execution packets All subsequent fetch packets have 1 execution packet Notice the holes/bubbles in the pipeline caused by lack of parallelization Page 32 of 54
33 Execute Stage of C6713 Pipeline C67x has 10 execute phases (floating point) C62x/C64x have 5 execute phases (fixed point) Different types of instructions require different numbers of these phases to complete their execution Anywhere between 1 and all 10 phases Most instruction tie up their functional unit for only one phase (E1) Page 33 of 54
34 Execution Stage Examples (1) results available after E1 (zero delay slots) Functional unit free after E1 (1 functional unit latency) Page 34 of 54
35 Execution Stage Examples (2) results available after E4 (3 delay slots) Functional unit free after E1 (1 functional unit latency) Page 35 of 54
36 Execution Stage Examples (3) Results available after E10 (9 delay slots) Functional unit free after E4 (4 functional unit latency) Page 36 of 54
37 Functional Latency & Delay Slots Functional Latency: How long must we wait for the functional unit to be free? Delay Slots: How long must we wait for the result? General remarks: Functional unit latency <= Delay slots Strange results will occur in ASM code if you don t pay attention to delay slots and functional unit latency All problems can be resolved by waiting with NOPs Efficient ASM code tries to keep functional units busy all of the time. Efficient code is hard to write (and follow). Page 37 of 54
38 Lunch Break Workshop resumes at 1:30pm Page 38 of 54
39 Some Things to Try Try rewriting your FIR filter code as a C- callable ASM function Create a new ASM file Call the ASM function from your main code See Chassaing examples fircasm.pjt and fircasmfast.pjt for ideas Profile your new FIR code and compare to the optimized compiler. Page 39 of 54
40 Infinite Impulse Response (IIR) Filters Advantages: Can achieve a desired frequency response with less memory and computation than FIR filters Disadvantages: Can be unstable Affected more by finite-precision math due to feedback Input/output relationship: Page 40 of 54
41 IIR Filtering - Stability Transfer function: Note that the filter is stable only if all of its poles (roots of the denominator) have magnitude less than 1. Easy to check in Matlab: max(abs(roots(a))) Quantization of coefficients (a s and b s) will move the poles. A stable filter in infinite precision may not be stable after coefficient quantization. Numerator of H(z) does not affect stability. Page 41 of 54
42 Creating IIR Filters 1. Design filter Type: low pass, high pass, band pass, band stop,... Filter order N Desired frequency response Matlab 2. Decide on a realization structure 3. Decide how coefficients will be quantized. 4. Compute coefficients 5. Decide how everything else will be quantized (input samples, output samples, result of multiplies, result of additions) 6. Write code to realize filter 7. Test filter and compare to theoretical expectations CCS Page 42 of 54
43 IIR Realization Structures Many different IIR realization structures available (see options in fdatool) Structures can have different memory and computational requirements All structures give the same behavior when the math is infinite precision Structures can have very different behavior when the math is finite precision Stability Accuracy with respect to the desired response Potential for overflow/underflow Page 43 of 54
44 Direct Form I Notation: 1/z = one sample delay Page 44 of 54
45 Direct Form II Note fewer delay elements (less memory) than DFI. Can prove that DFII has minimum number of delay elements. Page 45 of 54
46 Direct Form II: Second Order Sections Transfer function H(z) is factored into H 1 (z)h 2 (z) H K (z) where each factor H k (z) has a quadratic denominator and numerator Each quadratic factor is called a Second Order Section (SOS) Each SOS is realized in DFII The results from each SOS are then passed to the next SOS Page 46 of 54
47 Direct Form II: Second Order Sections Very popular realization structure Low memory requirements (same as DFII) Easy to check the stability of each SOS Can write one DFII-SOS filter function and reuse it for any length filter Tends to be less sensitive to finite precision math than DFI or DFII. Why? Dynamic range of coefficients in each SOS is smaller Coefficient quantization only affects local poles/zeros Page 47 of 54

48 Determining How Coefficient Quantization Will Affect Your Filter set quantization parameters Page 48 of 54
49 IIR Filtering Final Remarks IIR filters are more sensitive to choice of realization structure and data types than FIR filters due to feedback Memory requirements Time required to compute filter output Accuracy with respect to the desired response Stability Potential for overflow/underflow fdatool can be useful for examining the tradeoffs before writing code Page 49 of 54
50 Some Things to Try In fdatool, design an IIR filter with the following specs: Bandstop First passband Second passband Hz Minimum filter order Explore DFII with and without Second Order Sections Try various coefficient quantizations including fixed point Implement your best filter in CCS Compare actual performance to the theoretical predictions Page 50 of 54
51 Other Interesting Applications of Real-Time DSP Fast Fourier Transform (FFT): Chapter 6 Example projects: DFT, FFT256C, FFTSinetable, FFTr2, FFTr4, FFTr4_sim, fastconvo, fastconvo_sim, graphiceq Note that TI provides optimized FFT functions (search for cfftr2_dit, cfftr2_dif, cfftr4_dif) Adaptive Filtering: Chapter 7 Example projects: Adaptc, adaptnoise, adaptnoise_2in, adaptidfir, adaptidfirw, adaptidiir, adaptpredict, adaptpredict_2in, Page 51 of 54
52 Workshop Day 2 Summary What you learned today: How to use Matlab s Link for Code Composer Studio How to profile code size and execution times. How data types and memory usage affect code execution times. How to reduce code size and execution time with CCS s optimizing compiler. How assembly language can be integrated into your projects. Basics of the TMS320C6713 architecture. Fetch packets, execute packets, pipelining Functional unit latency and delay slots How to design and implement IIR filters on the C6713 Realization structures Quantization considerations Other applications for the C6713 DSK FFT Adaptive filtering Page 52 of 54
53 Workshop Day 2 Reference Material Matlab s Link for Code Composer Studio help (>> doc ccslink) Chassaing textbook Chapters 3, 5-8 CCS Help system SPRU509F.PDF CCS v3.1 IDE Getting Started Guide C6713DSK.HLP C6713 DSK specific help material SPRU198G.PDF TMS320C6000 Programmer s Guide SPRU189F.PDF TMS320C6000 CPU and Instruction Set Reference Guide Matlab fdatool help (>> doc fdatool) Other Matlab help (>> doc soundsc, >> doc wavwrite) Latest documentation available at Page 53 of 54
54 Additional Exploration Explore some of Chassaing s FFT and adaptive filtering projects in the myprojects directory Explore some of the reference literature (especially the Chassaing text and the CCS help system) Try a lab assignment in the ECE4703 real-time DSP course: Page 54 of 54
Digital Signal Processing and Applications with the TMS320C6713 and the TMS DSK
 Digital Signal Processing and Applications with the TMS320C6713 and the TMS3206416 DSK Day 2 D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering
Digital Signal Processing and Applications with the TMS320C6713 and the TMS3206416 DSK Day 2 D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering
D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department
 D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu 12-November-2012 Efficient Real-Time DSP Data types Memory usage
D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu 12-November-2012 Efficient Real-Time DSP Data types Memory usage
Digital Signal Processing and Applications with the TMS320C6713 DSK
 Digital Signal Processing and Applications with the TMS320C6713 DSK Day 1 D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu
Digital Signal Processing and Applications with the TMS320C6713 DSK Day 1 D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu
Workshop Goals. Page 2 of 68
 D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu October 19-20, 2009 Day 1 handouts Workshop Goals Correctly install
D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu October 19-20, 2009 Day 1 handouts Workshop Goals Correctly install
ECE4703 Real-Time DSP Orientation Lab
 ECE4703 Real-Time DSP Orientation Lab D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu 25-Oct-2006 C6713 DSK Overview
ECE4703 Real-Time DSP Orientation Lab D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu 25-Oct-2006 C6713 DSK Overview
D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department
 D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu 3-November-2008 Analog To Digital Conversion analog signal ADC digital
D. Richard Brown III Associate Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu 3-November-2008 Analog To Digital Conversion analog signal ADC digital
D. Richard Brown III Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department
 D. Richard Brown III Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu Lecture 2 Some Challenges of Real-Time DSP Analog to digital conversion Are
D. Richard Brown III Professor Worcester Polytechnic Institute Electrical and Computer Engineering Department drb@ece.wpi.edu Lecture 2 Some Challenges of Real-Time DSP Analog to digital conversion Are
ECE4703 B Term Laboratory Assignment 2 Floating Point Filters Using the TMS320C6713 DSK Project Code and Report Due at 3 pm 9-Nov-2017
 ECE4703 B Term 2017 -- Laboratory Assignment 2 Floating Point Filters Using the TMS320C6713 DSK Project Code and Report Due at 3 pm 9-Nov-2017 The goals of this laboratory assignment are: to familiarize
ECE4703 B Term 2017 -- Laboratory Assignment 2 Floating Point Filters Using the TMS320C6713 DSK Project Code and Report Due at 3 pm 9-Nov-2017 The goals of this laboratory assignment are: to familiarize
One instruction specifies multiple operations All scheduling of execution units is static
 VLIW Architectures Very Long Instruction Word Architecture One instruction specifies multiple operations All scheduling of execution units is static Done by compiler Static scheduling should mean less
VLIW Architectures Very Long Instruction Word Architecture One instruction specifies multiple operations All scheduling of execution units is static Done by compiler Static scheduling should mean less
Hsiao-Lung Chan Dept. Electrical Engineering Chang Gung University
 TMS320C6x Architecture Hsiao-Lung Chan Dept. Electrical Engineering g Chang Gung University chanhl@mail.cgu.edu.twcgu VLIW: Fetchs eight 32-bit instructions every single cycle 14 interrupts: reset, NMI,
TMS320C6x Architecture Hsiao-Lung Chan Dept. Electrical Engineering g Chang Gung University chanhl@mail.cgu.edu.twcgu VLIW: Fetchs eight 32-bit instructions every single cycle 14 interrupts: reset, NMI,
Experiment 6 Finite Impulse Response Digital Filter (FIR).
.") Experiment 6 Finite Impulse Response Digital Filter (FIR). Implementing a real-time FIR digital filtering operations using the TMS320C6713 DSP Starter Kit (DSK). Recollect in the previous experiment 5
Experiment 6 Finite Impulse Response Digital Filter (FIR). Implementing a real-time FIR digital filtering operations using the TMS320C6713 DSP Starter Kit (DSK). Recollect in the previous experiment 5
ECE 5655/4655 Laboratory Problems
 Assignment #1 ECE 5655/4655 Laboratory Problems Make note of the following: Due Monday February 10, 2014 Each team of two will turn in documentation for the assigned problem(s), that is, assembly or C
Assignment #1 ECE 5655/4655 Laboratory Problems Make note of the following: Due Monday February 10, 2014 Each team of two will turn in documentation for the assigned problem(s), that is, assembly or C
ECE4703 Laboratory Assignment 5
 ECE4703 Laboratory Assignment 5 The goals of this laboratory assignment are: to develop an understanding of frame-based digital signal processing, to familiarize you with computationally efficient techniques
ECE4703 Laboratory Assignment 5 The goals of this laboratory assignment are: to develop an understanding of frame-based digital signal processing, to familiarize you with computationally efficient techniques
Real-Time DSP for Educators
 Real-Time DSP for Educators Michael Morrow University of Wisconsin-Madison Thad Welch United States Naval Academy Cameron Wright University of Wyoming Introduction Agenda Motivation DSK and Software Installation
Real-Time DSP for Educators Michael Morrow University of Wisconsin-Madison Thad Welch United States Naval Academy Cameron Wright University of Wyoming Introduction Agenda Motivation DSK and Software Installation
Embedded Target for TI C6000 DSP 2.0 Release Notes
 1 Embedded Target for TI C6000 DSP 2.0 Release Notes New Features................... 1-2 Two Virtual Targets Added.............. 1-2 Added C62x DSP Library............... 1-2 Fixed-Point Code Generation
1 Embedded Target for TI C6000 DSP 2.0 Release Notes New Features................... 1-2 Two Virtual Targets Added.............. 1-2 Added C62x DSP Library............... 1-2 Fixed-Point Code Generation
Dual Tone Multi-Frequency (DTMF) Generation with TI-DSP TMS320C6713 Processor
 Generation with TI-DSP TMS320C6713 Processor") Dual Tone Multi-Frequency (DTMF) Generation with TI-DSP TMS320C6713 Processor Objective The goals of this lab are to gain familiarity with TI DSP code composer studio and the TI-DSP Starter Kit (DSK).
Dual Tone Multi-Frequency (DTMF) Generation with TI-DSP TMS320C6713 Processor Objective The goals of this lab are to gain familiarity with TI DSP code composer studio and the TI-DSP Starter Kit (DSK).
As CCS starts up, a splash screen similar to one shown below will appear.
 APPENDIX A. CODE COMPOSER STUDIO (CCS) v6.1: A BRIEF TUTORIAL FOR THE DSK6713 A.1 Introduction Code Composer Studio (CCS) is Texas Instruments Eclipse-based integrated development environment (IDE) for
APPENDIX A. CODE COMPOSER STUDIO (CCS) v6.1: A BRIEF TUTORIAL FOR THE DSK6713 A.1 Introduction Code Composer Studio (CCS) is Texas Instruments Eclipse-based integrated development environment (IDE) for
Rapid Prototyping System for Teaching Real-Time Digital Signal Processing
 IEEE TRANSACTIONS ON EDUCATION, VOL. 43, NO. 1, FEBRUARY 2000 19 Rapid Prototyping System for Teaching Real-Time Digital Signal Processing Woon-Seng Gan, Member, IEEE, Yong-Kim Chong, Wilson Gong, and
IEEE TRANSACTIONS ON EDUCATION, VOL. 43, NO. 1, FEBRUARY 2000 19 Rapid Prototyping System for Teaching Real-Time Digital Signal Processing Woon-Seng Gan, Member, IEEE, Yong-Kim Chong, Wilson Gong, and
ECE 487 LAB 1 ÇANKAYA UNIVERSITY Overview of DSP Board
 ECE 487 LAB 1 ÇANKAYA UNIVERSITY Overview of DSP Board DSP (Digital Signal Processor) boards are used in high performance, high throughput signal processing applications. You can find there processors
ECE 487 LAB 1 ÇANKAYA UNIVERSITY Overview of DSP Board DSP (Digital Signal Processor) boards are used in high performance, high throughput signal processing applications. You can find there processors
EECS 452 Lab 2 Basic DSP Using the C5515 ezdsp Stick
 EECS 452 Lab 2 Basic DSP Using the C5515 ezdsp Stick 1. Pre-lab Q1. Print the file you generated (and modified) as described above. Q2. The default structure of the FIR filter is Direct-Form FIR a. How
EECS 452 Lab 2 Basic DSP Using the C5515 ezdsp Stick 1. Pre-lab Q1. Print the file you generated (and modified) as described above. Q2. The default structure of the FIR filter is Direct-Form FIR a. How
Digital Signal Processing Laboratory 7: IIR Notch Filters Using the TMS320C6711
 Digital Signal Processing Laboratory 7: IIR Notch Filters Using the TMS320C6711 PreLab due Wednesday, 3 November 2010 Objective: To implement a simple filter using a digital signal processing microprocessor
Digital Signal Processing Laboratory 7: IIR Notch Filters Using the TMS320C6711 PreLab due Wednesday, 3 November 2010 Objective: To implement a simple filter using a digital signal processing microprocessor
ECE4703 B Term Laboratory Assignment 1
 ECE4703 B Term 2017 -- Laboratory Assignment 1 Introduction to the TMS320C6713 DSK and Code Composer Studio The goals of this laboratory assignment are: Project Code and Report Due at 3 pm 2-Nov-2017 to
ECE4703 B Term 2017 -- Laboratory Assignment 1 Introduction to the TMS320C6713 DSK and Code Composer Studio The goals of this laboratory assignment are: Project Code and Report Due at 3 pm 2-Nov-2017 to
Get the Second-Order Section Coefficients
 MATLAB Design Functions Three sections will be required, with one section really only being first-order The MATLAB function we need to use is either zp2sos or ss2sos zp2sos converts a zero-pole form (zp)
MATLAB Design Functions Three sections will be required, with one section really only being first-order The MATLAB function we need to use is either zp2sos or ss2sos zp2sos converts a zero-pole form (zp)
Lecture 4 - Number Representations, DSK Hardware, Assembly Programming
 Lecture 4 - Number Representations, DSK Hardware, Assembly Programming James Barnes (James.Barnes@colostate.edu) Spring 2014 Colorado State University Dept of Electrical and Computer Engineering ECE423
Lecture 4 - Number Representations, DSK Hardware, Assembly Programming James Barnes (James.Barnes@colostate.edu) Spring 2014 Colorado State University Dept of Electrical and Computer Engineering ECE423
Digital Signal Processing System Design: LabVIEW-Based Hybrid Programming Nasser Kehtarnavaz
 Digital Signal Processing System Design: LabVIEW-Based Hybrid Programming Nasser Kehtarnavaz Digital Signal Processing System Design: LabVIEW-Based Hybrid Programming by Nasser Kehtarnavaz University
Digital Signal Processing System Design: LabVIEW-Based Hybrid Programming Nasser Kehtarnavaz Digital Signal Processing System Design: LabVIEW-Based Hybrid Programming by Nasser Kehtarnavaz University
DSP Mapping, Coding, Optimization
 DSP Mapping, Coding, Optimization On TMS320C6000 Family using CCS (Code Composer Studio) ver 3.3 Started with writing a simple C code in the class, from scratch Project called First, written for C6713
DSP Mapping, Coding, Optimization On TMS320C6000 Family using CCS (Code Composer Studio) ver 3.3 Started with writing a simple C code in the class, from scratch Project called First, written for C6713
C66x CorePac: Achieving High Performance
 C66x CorePac: Achieving High Performance Agenda 1. CorePac Architecture 2. Single Instruction Multiple Data (SIMD) 3. Memory Access 4. Pipeline Concept CorePac Architecture 1. CorePac Architecture 2. Single
C66x CorePac: Achieving High Performance Agenda 1. CorePac Architecture 2. Single Instruction Multiple Data (SIMD) 3. Memory Access 4. Pipeline Concept CorePac Architecture 1. CorePac Architecture 2. Single
An introduction to DSP s. Examples of DSP applications Why a DSP? Characteristics of a DSP Architectures
 An introduction to DSP s Examples of DSP applications Why a DSP? Characteristics of a DSP Architectures DSP example: mobile phone DSP example: mobile phone with video camera DSP: applications Why a DSP?
An introduction to DSP s Examples of DSP applications Why a DSP? Characteristics of a DSP Architectures DSP example: mobile phone DSP example: mobile phone with video camera DSP: applications Why a DSP?
Using the DSK In CalPoly EE Courses - Dr Fred DePiero
 Using the DSK In CalPoly EE Courses - Dr Fred DePiero The DSK by Texas Instruments is a development platform for DSP applications. The platform includes Code Composer Studio (CCS) with a high performance
Using the DSK In CalPoly EE Courses - Dr Fred DePiero The DSK by Texas Instruments is a development platform for DSP applications. The platform includes Code Composer Studio (CCS) with a high performance
RISC IMPLEMENTATION OF OPTIMAL PROGRAMMABLE DIGITAL IIR FILTER
 RISC IMPLEMENTATION OF OPTIMAL PROGRAMMABLE DIGITAL IIR FILTER Miss. Sushma kumari IES COLLEGE OF ENGINEERING, BHOPAL MADHYA PRADESH Mr. Ashish Raghuwanshi(Assist. Prof.) IES COLLEGE OF ENGINEERING, BHOPAL
RISC IMPLEMENTATION OF OPTIMAL PROGRAMMABLE DIGITAL IIR FILTER Miss. Sushma kumari IES COLLEGE OF ENGINEERING, BHOPAL MADHYA PRADESH Mr. Ashish Raghuwanshi(Assist. Prof.) IES COLLEGE OF ENGINEERING, BHOPAL
file://c:\documents and Settings\degrysep\Local Settings\Temp\~hh607E.htm
 Page 1 of 18 Trace Tutorial Overview The objective of this tutorial is to acquaint you with the basic use of the Trace System software. The Trace System software includes the following: The Trace Control
Page 1 of 18 Trace Tutorial Overview The objective of this tutorial is to acquaint you with the basic use of the Trace System software. The Trace System software includes the following: The Trace Control
Chapter 7. Hardware Implementation Tools
 Hardware Implementation Tools 137 The testing and embedding speech processing algorithm on general purpose PC and dedicated DSP platform require specific hardware implementation tools. Real time digital
Hardware Implementation Tools 137 The testing and embedding speech processing algorithm on general purpose PC and dedicated DSP platform require specific hardware implementation tools. Real time digital
Classification of Semiconductor LSI
 Classification of Semiconductor LSI 1. Logic LSI: ASIC: Application Specific LSI (you have to develop. HIGH COST!) For only mass production. ASSP: Application Specific Standard Product (you can buy. Low
Classification of Semiconductor LSI 1. Logic LSI: ASIC: Application Specific LSI (you have to develop. HIGH COST!) For only mass production. ASSP: Application Specific Standard Product (you can buy. Low
Computer Systems. Binary Representation. Binary Representation. Logical Computation: Boolean Algebra
 Binary Representation Computer Systems Information is represented as a sequence of binary digits: Bits What the actual bits represent depends on the context: Seminar 3 Numerical value (integer, floating
Binary Representation Computer Systems Information is represented as a sequence of binary digits: Bits What the actual bits represent depends on the context: Seminar 3 Numerical value (integer, floating
EECS 452 Midterm Closed book part Fall 2010
 EECS 452 Midterm Closed book part Fall 2010 Name: unique name: Sign the honor code: I have neither given nor received aid on this exam nor observed anyone else doing so. Scores: # Points Closed book Page
EECS 452 Midterm Closed book part Fall 2010 Name: unique name: Sign the honor code: I have neither given nor received aid on this exam nor observed anyone else doing so. Scores: # Points Closed book Page
DSP Development Environment: Introductory Exercise for TI TMS320C55x
 Connexions module: m13811 1 DSP Development Environment: Introductory Exercise for TI TMS320C55x Thomas Shen David Jun Based on DSP Development Environment: Introductory Exercise for TI TMS320C54x (ECE
Connexions module: m13811 1 DSP Development Environment: Introductory Exercise for TI TMS320C55x Thomas Shen David Jun Based on DSP Development Environment: Introductory Exercise for TI TMS320C54x (ECE
REAL-TIME DIGITAL SIGNAL PROCESSING
 REAL-TIME DIGITAL SIGNAL PROCESSING FUNDAMENTALS, IMPLEMENTATIONS AND APPLICATIONS Third Edition Sen M. Kuo Northern Illinois University, USA Bob H. Lee Ittiam Systems, Inc., USA Wenshun Tian Sonus Networks,
REAL-TIME DIGITAL SIGNAL PROCESSING FUNDAMENTALS, IMPLEMENTATIONS AND APPLICATIONS Third Edition Sen M. Kuo Northern Illinois University, USA Bob H. Lee Ittiam Systems, Inc., USA Wenshun Tian Sonus Networks,
Outline: System Development and Programming with the ADSP-TS101 (TigerSHARC)
") Course Name: Course Number: Course Description: Goals/Objectives: Pre-requisites: Target Audience: Target Duration: System Development and Programming with the ADSP-TS101 (TigerSHARC) This is a practical
Course Name: Course Number: Course Description: Goals/Objectives: Pre-requisites: Target Audience: Target Duration: System Development and Programming with the ADSP-TS101 (TigerSHARC) This is a practical
EECS 452 Midterm Closed book part Fall 2010
 EECS 452 Midterm Closed book part Fall 2010 Name: unique name: Sign the honor code: I have neither given nor received aid on this exam nor observed anyone else doing so. Scores: # Points Closed book Page
EECS 452 Midterm Closed book part Fall 2010 Name: unique name: Sign the honor code: I have neither given nor received aid on this exam nor observed anyone else doing so. Scores: # Points Closed book Page
Lab 6 : Introduction to Simulink, Link for CCS & Real-Time Workshop
 Lab 6 : Introduction to Simulink, Link for CCS & Real-Time Workshop September, 2006 1 Overview The purpose of this lab is to familiarize you with Simulink, Real Time Workshop, Link for CCS and how they
Lab 6 : Introduction to Simulink, Link for CCS & Real-Time Workshop September, 2006 1 Overview The purpose of this lab is to familiarize you with Simulink, Real Time Workshop, Link for CCS and how they
April 4, 2001: Debugging Your C24x DSP Design Using Code Composer Studio Real-Time Monitor
 1 This presentation was part of TI s Monthly TMS320 DSP Technology Webcast Series April 4, 2001: Debugging Your C24x DSP Design Using Code Composer Studio Real-Time Monitor To view this 1-hour 1 webcast
1 This presentation was part of TI s Monthly TMS320 DSP Technology Webcast Series April 4, 2001: Debugging Your C24x DSP Design Using Code Composer Studio Real-Time Monitor To view this 1-hour 1 webcast
Architectures & instruction sets R_B_T_C_. von Neumann architecture. Computer architecture taxonomy. Assembly language.
 Architectures & instruction sets Computer architecture taxonomy. Assembly language. R_B_T_C_ 1. E E C E 2. I E U W 3. I S O O 4. E P O I von Neumann architecture Memory holds data and instructions. Central
Architectures & instruction sets Computer architecture taxonomy. Assembly language. R_B_T_C_ 1. E E C E 2. I E U W 3. I S O O 4. E P O I von Neumann architecture Memory holds data and instructions. Central
Leveraging DSP: Basic Optimization for C6000 Digital Signal Processors
 Leveraging DSP: Basic Optimization for C6000 Digital Signal Processors Agenda C6000 VLIW Architecture Hardware Pipeline Software Pipeline Optimization Estimating performance Ui Using CCS to optimize i
Leveraging DSP: Basic Optimization for C6000 Digital Signal Processors Agenda C6000 VLIW Architecture Hardware Pipeline Software Pipeline Optimization Estimating performance Ui Using CCS to optimize i
Ti Parallel Computing PIPELINING. Michał Roziecki, Tomáš Cipr
 Ti5317000 Parallel Computing PIPELINING Michał Roziecki, Tomáš Cipr 2005-2006 Introduction to pipelining What is this What is pipelining? Pipelining is an implementation technique in which multiple instructions
Ti5317000 Parallel Computing PIPELINING Michał Roziecki, Tomáš Cipr 2005-2006 Introduction to pipelining What is this What is pipelining? Pipelining is an implementation technique in which multiple instructions
Digital Signal Processor 2010/1/4
 Digital Signal Processor 1 Analog to Digital Shift 2 Digital Signal Processing Applications FAX Phone Personal Computer Medical Instruments DVD player Air conditioner (controller) Digital Camera MP3 audio
Digital Signal Processor 1 Analog to Digital Shift 2 Digital Signal Processing Applications FAX Phone Personal Computer Medical Instruments DVD player Air conditioner (controller) Digital Camera MP3 audio
Introduction to Pipelining. Silvina Hanono Wachman Computer Science & Artificial Intelligence Lab M.I.T.
 Introduction to Pipelining Silvina Hanono Wachman Computer Science & Artificial Intelligence Lab M.I.T. L15-1 Performance Measures Two metrics of interest when designing a system: 1. Latency: The delay
Introduction to Pipelining Silvina Hanono Wachman Computer Science & Artificial Intelligence Lab M.I.T. L15-1 Performance Measures Two metrics of interest when designing a system: 1. Latency: The delay
Implementing Biquad IIR filters with the ASN Filter Designer and the ARM CMSIS DSP software framework
 Implementing Biquad IIR filters with the ASN Filter Designer and the ARM CMSIS DSP software framework Application note (ASN-AN05) November 07 (Rev 4) SYNOPSIS Infinite impulse response (IIR) filters are
Implementing Biquad IIR filters with the ASN Filter Designer and the ARM CMSIS DSP software framework Application note (ASN-AN05) November 07 (Rev 4) SYNOPSIS Infinite impulse response (IIR) filters are
Setup the environment for first time use
 SGN-16006 Bachelor s Laboratory Course in Signal Processing Signal processor assignment (June 2, 2014) Setup the environment for first time use Use the following procedure to start Code composer studio
SGN-16006 Bachelor s Laboratory Course in Signal Processing Signal processor assignment (June 2, 2014) Setup the environment for first time use Use the following procedure to start Code composer studio
Processing Unit CS206T
 Processing Unit CS206T Microprocessors The density of elements on processor chips continued to rise More and more elements were placed on each chip so that fewer and fewer chips were needed to construct
Processing Unit CS206T Microprocessors The density of elements on processor chips continued to rise More and more elements were placed on each chip so that fewer and fewer chips were needed to construct
DSP Laboratory (EELE 4110) Lab#6 Introduction to Texas Instruments DSK TMS320C6711
 Lab#6 Introduction to Texas Instruments DSK TMS320C6711") Islamic University of Gaza Faculty of Engineering Electrical Engineering Department Spring-2011 DSP Laboratory (EELE 4110) Lab#6 Introduction to Texas Instruments DSK TMS320C6711 OBJECTIVES: Our aim is
Islamic University of Gaza Faculty of Engineering Electrical Engineering Department Spring-2011 DSP Laboratory (EELE 4110) Lab#6 Introduction to Texas Instruments DSK TMS320C6711 OBJECTIVES: Our aim is
Why Study Assembly Language?
 Why Study Assembly Language? This depends on the decade in which you studied assembly language. 1940 s You cannot study assembly language. It does not exist yet. 1950 s You study assembly language because,
Why Study Assembly Language? This depends on the decade in which you studied assembly language. 1940 s You cannot study assembly language. It does not exist yet. 1950 s You study assembly language because,
DSP Platforms Lab (AD-SHARC) Session 05
 Session 05") University of Miami - Frost School of Music DSP Platforms Lab (AD-SHARC) Session 05 Description This session will be dedicated to give an introduction to the hardware architecture and assembly programming
University of Miami - Frost School of Music DSP Platforms Lab (AD-SHARC) Session 05 Description This session will be dedicated to give an introduction to the hardware architecture and assembly programming
Parallelism. Execution Cycle. Dual Bus Simple CPU. Pipelining COMP375 1
 Pipelining COMP375 Computer Architecture and dorganization Parallelism The most common method of making computers faster is to increase parallelism. There are many levels of parallelism Macro Multiple
Pipelining COMP375 Computer Architecture and dorganization Parallelism The most common method of making computers faster is to increase parallelism. There are many levels of parallelism Macro Multiple
CPSC 313, 04w Term 2 Midterm Exam 2 Solutions
 1. (10 marks) Short answers. CPSC 313, 04w Term 2 Midterm Exam 2 Solutions Date: March 11, 2005; Instructor: Mike Feeley 1a. Give an example of one important CISC feature that is normally not part of a
1. (10 marks) Short answers. CPSC 313, 04w Term 2 Midterm Exam 2 Solutions Date: March 11, 2005; Instructor: Mike Feeley 1a. Give an example of one important CISC feature that is normally not part of a
WS_CCESSH-OUT-v1.00.doc Page 1 of 8
 Course Name: Course Code: Course Description: System Development with CrossCore Embedded Studio (CCES) and the ADI SHARC Processor WS_CCESSH This is a practical and interactive course that is designed
Course Name: Course Code: Course Description: System Development with CrossCore Embedded Studio (CCES) and the ADI SHARC Processor WS_CCESSH This is a practical and interactive course that is designed
2008/12/23. System Arch 2008 (Fire Tom Wada) 1
 1") Digital it Signal Processor System Arch 2008 (Fire Tom Wada) 1 Analog to Digital Shift System Arch 2008 (Fire Tom Wada) 2 Digital Signal Processing Applications FAX Phone Personal Computer Medical Instruments
Digital it Signal Processor System Arch 2008 (Fire Tom Wada) 1 Analog to Digital Shift System Arch 2008 (Fire Tom Wada) 2 Digital Signal Processing Applications FAX Phone Personal Computer Medical Instruments
ECE4703 Mid-term Exam B-16. Name: Box #:
 ECE4703 Mid-term Exam B-16 Name: Box #: The exam is worth 100 points with points per problem indicated. Please read through the entire exam in order to properly budget your time. Write neatly and show
ECE4703 Mid-term Exam B-16 Name: Box #: The exam is worth 100 points with points per problem indicated. Please read through the entire exam in order to properly budget your time. Write neatly and show
Evaluating MMX Technology Using DSP and Multimedia Applications
 Evaluating MMX Technology Using DSP and Multimedia Applications Ravi Bhargava * Lizy K. John * Brian L. Evans Ramesh Radhakrishnan * November 22, 1999 The University of Texas at Austin Department of Electrical
Evaluating MMX Technology Using DSP and Multimedia Applications Ravi Bhargava * Lizy K. John * Brian L. Evans Ramesh Radhakrishnan * November 22, 1999 The University of Texas at Austin Department of Electrical
An introduction to Digital Signal Processors (DSP) Using the C55xx family
 Using the C55xx family") An introduction to Digital Signal Processors (DSP) Using the C55xx family Group status (~2 minutes each) 5 groups stand up What processor(s) you are using Wireless? If so, what technologies/chips are you
An introduction to Digital Signal Processors (DSP) Using the C55xx family Group status (~2 minutes each) 5 groups stand up What processor(s) you are using Wireless? If so, what technologies/chips are you
Fatima Michael College of Engineering & Technology
 DEPARTMENT OF ECE V SEMESTER ECE QUESTION BANK EC6502 PRINCIPLES OF DIGITAL SIGNAL PROCESSING UNIT I DISCRETE FOURIER TRANSFORM PART A 1. Obtain the circular convolution of the following sequences x(n)
DEPARTMENT OF ECE V SEMESTER ECE QUESTION BANK EC6502 PRINCIPLES OF DIGITAL SIGNAL PROCESSING UNIT I DISCRETE FOURIER TRANSFORM PART A 1. Obtain the circular convolution of the following sequences x(n)
Caches and Memory Hierarchy: Review. UCSB CS240A, Fall 2017
 Caches and Memory Hierarchy: Review UCSB CS24A, Fall 27 Motivation Most applications in a single processor runs at only - 2% of the processor peak Most of the single processor performance loss is in the
Caches and Memory Hierarchy: Review UCSB CS24A, Fall 27 Motivation Most applications in a single processor runs at only - 2% of the processor peak Most of the single processor performance loss is in the
Mechatronics Laboratory Assignment #1 Programming a Digital Signal Processor and the TI OMAPL138 DSP/ARM
 Mechatronics Laboratory Assignment #1 Programming a Digital Signal Processor and the TI OMAPL138 DSP/ARM Recommended Due Date: By your lab time the week of January 29 th Possible Points: If checked off
Mechatronics Laboratory Assignment #1 Programming a Digital Signal Processor and the TI OMAPL138 DSP/ARM Recommended Due Date: By your lab time the week of January 29 th Possible Points: If checked off
2IN35 VLSI Programming Lab Work Assignment 1: Hardware design using Verilog
 2IN35 VLSI Programming Lab Work Assignment 1: Hardware design using Verilog Hrishikesh Salunkhe, h.l.salunkhe@tue.nl, Alok Lele, a.lele@tue.nl April 28, 2015 1 Contents 1 Introduction 3 2 Hardware design
2IN35 VLSI Programming Lab Work Assignment 1: Hardware design using Verilog Hrishikesh Salunkhe, h.l.salunkhe@tue.nl, Alok Lele, a.lele@tue.nl April 28, 2015 1 Contents 1 Introduction 3 2 Hardware design
A Microprocessor Systems Fall 2009
 304 426A Microprocessor Systems Fall 2009 Lab 1: Assembly and Embedded C Objective This exercise introduces the Texas Instrument MSP430 assembly language, the concept of the calling convention and different
304 426A Microprocessor Systems Fall 2009 Lab 1: Assembly and Embedded C Objective This exercise introduces the Texas Instrument MSP430 assembly language, the concept of the calling convention and different
Problem Set 1 Solutions
 CSE 260 Digital Computers: Organization and Logical Design Jon Turner Problem Set 1 Solutions 1. Give a brief definition of each of the following parts of a computer system: CPU, main memory, floating
CSE 260 Digital Computers: Organization and Logical Design Jon Turner Problem Set 1 Solutions 1. Give a brief definition of each of the following parts of a computer system: CPU, main memory, floating
DSP Applications Using C and the TMS320C6x DSK
 DSP Applications Using C and the TMS320C6x DSK DSP Applications Using C and the TMS320C6x DSK. Rulph Chassaing Copyright 2002 John Wiley & Sons, Inc. ISBNs: 0-471-20754-3 (Hardback); 0-471-22112-0 (Electronic)
DSP Applications Using C and the TMS320C6x DSK DSP Applications Using C and the TMS320C6x DSK. Rulph Chassaing Copyright 2002 John Wiley & Sons, Inc. ISBNs: 0-471-20754-3 (Hardback); 0-471-22112-0 (Electronic)
Caches and Memory Hierarchy: Review. UCSB CS240A, Winter 2016
 Caches and Memory Hierarchy: Review UCSB CS240A, Winter 2016 1 Motivation Most applications in a single processor runs at only 10-20% of the processor peak Most of the single processor performance loss
Caches and Memory Hierarchy: Review UCSB CS240A, Winter 2016 1 Motivation Most applications in a single processor runs at only 10-20% of the processor peak Most of the single processor performance loss
General Purpose Signal Processors
 General Purpose Signal Processors First announced in 1978 (AMD) for peripheral computation such as in printers, matured in early 80 s (TMS320 series). General purpose vs. dedicated architectures: Pros:
General Purpose Signal Processors First announced in 1978 (AMD) for peripheral computation such as in printers, matured in early 80 s (TMS320 series). General purpose vs. dedicated architectures: Pros:
Assembly Language. Lecture 2 - x86 Processor Architecture. Ahmed Sallam
 Assembly Language Lecture 2 - x86 Processor Architecture Ahmed Sallam Introduction to the course Outcomes of Lecture 1 Always check the course website Don t forget the deadline rule!! Motivations for studying
Assembly Language Lecture 2 - x86 Processor Architecture Ahmed Sallam Introduction to the course Outcomes of Lecture 1 Always check the course website Don t forget the deadline rule!! Motivations for studying
Exercise 3-1. The Program Controller EXERCISE OBJECTIVES
 Exercise 3-1 The Program Controller EXERCISE OBJECTIVES Upon completion of this exercise, you will be familiar with the function of the hardware and software features that digital signal processors have
Exercise 3-1 The Program Controller EXERCISE OBJECTIVES Upon completion of this exercise, you will be familiar with the function of the hardware and software features that digital signal processors have
Lab 1. OMAP5912 Starter Kit (OSK5912)
") Lab 1. OMAP5912 Starter Kit (OSK5912) Developing DSP Applications 1. Overview In addition to having an ARM926EJ-S core, the OMAP5912 processor has a C55x DSP core. The DSP core can be used by the ARM to
Lab 1. OMAP5912 Starter Kit (OSK5912) Developing DSP Applications 1. Overview In addition to having an ARM926EJ-S core, the OMAP5912 processor has a C55x DSP core. The DSP core can be used by the ARM to
C55x Digital Signal Processors Software Overview
 C55x Digital Signal Processors Software Overview Agenda C55x Chip Support Library (CSL) Introduction Benefits Structure Example C55x DSP Library (DSPLIB) Introduction Structure Programmer Reference Guide
C55x Digital Signal Processors Software Overview Agenda C55x Chip Support Library (CSL) Introduction Benefits Structure Example C55x DSP Library (DSPLIB) Introduction Structure Programmer Reference Guide
GDFLIB User's Guide. ARM Cortex M0+
 GDFLIB User's Guide ARM Cortex M0+ Document Number: CM0GDFLIBUG Rev. 4, 11/2016 2 NXP Semiconductors Contents Section number Title Page Chapter 1 Library 1.1 Introduction... 5 1.2 Library integration into
GDFLIB User's Guide ARM Cortex M0+ Document Number: CM0GDFLIBUG Rev. 4, 11/2016 2 NXP Semiconductors Contents Section number Title Page Chapter 1 Library 1.1 Introduction... 5 1.2 Library integration into
ECE 353 Lab 3. (A) To gain further practice in writing C programs, this time of a more advanced nature than seen before.
 To gain further practice in writing C programs, this time of a more advanced nature than seen before.") ECE 353 Lab 3 Motivation: The purpose of this lab is threefold: (A) To gain further practice in writing C programs, this time of a more advanced nature than seen before. (B) To reinforce what you learned
ECE 353 Lab 3 Motivation: The purpose of this lab is threefold: (A) To gain further practice in writing C programs, this time of a more advanced nature than seen before. (B) To reinforce what you learned
Computer Architecture 2/26/01 Lecture #
 Computer Architecture 2/26/01 Lecture #9 16.070 On a previous lecture, we discussed the software development process and in particular, the development of a software architecture Recall the output of the
Computer Architecture 2/26/01 Lecture #9 16.070 On a previous lecture, we discussed the software development process and in particular, the development of a software architecture Recall the output of the
CS 101, Mock Computer Architecture
 CS 101, Mock Computer Architecture Computer organization and architecture refers to the actual hardware used to construct the computer, and the way that the hardware operates both physically and logically
CS 101, Mock Computer Architecture Computer organization and architecture refers to the actual hardware used to construct the computer, and the way that the hardware operates both physically and logically
Conclusions. Introduction. Objectives. Module Topics
 Conclusions Introduction In this chapter a number of design support products and services offered by TI to assist you in the development of your DSP system will be described. Objectives As initially stated
Conclusions Introduction In this chapter a number of design support products and services offered by TI to assist you in the development of your DSP system will be described. Objectives As initially stated
Basic Computer Architecture
 Basic Computer Architecture CSCE 496/896: Embedded Systems Witawas Srisa-an Review of Computer Architecture Credit: Most of the slides are made by Prof. Wayne Wolf who is the author of the textbook. I
Basic Computer Architecture CSCE 496/896: Embedded Systems Witawas Srisa-an Review of Computer Architecture Credit: Most of the slides are made by Prof. Wayne Wolf who is the author of the textbook. I
VIII. DSP Processors. Digital Signal Processing 8 December 24, 2009
 Digital Signal Processing 8 December 24, 2009 VIII. DSP Processors 2007 Syllabus: Introduction to programmable DSPs: Multiplier and Multiplier-Accumulator (MAC), Modified bus structures and memory access
Digital Signal Processing 8 December 24, 2009 VIII. DSP Processors 2007 Syllabus: Introduction to programmable DSPs: Multiplier and Multiplier-Accumulator (MAC), Modified bus structures and memory access
Cache Justification for Digital Signal Processors
 Cache Justification for Digital Signal Processors by Michael J. Lee December 3, 1999 Cache Justification for Digital Signal Processors By Michael J. Lee Abstract Caches are commonly used on general-purpose
Cache Justification for Digital Signal Processors by Michael J. Lee December 3, 1999 Cache Justification for Digital Signal Processors By Michael J. Lee Abstract Caches are commonly used on general-purpose
Cycle Accurate Simulator for TMS320C62x, 8 way VLIW DSP Processor
 Cycle Accurate Simulator for TMS320C62x, 8 way VLIW DSP Processor Vinodh Cuppu, Graduate Student, Electrical Engineering, University of Maryland, College Park For ENEE 646 - Digital Computer Design, Fall
Cycle Accurate Simulator for TMS320C62x, 8 way VLIW DSP Processor Vinodh Cuppu, Graduate Student, Electrical Engineering, University of Maryland, College Park For ENEE 646 - Digital Computer Design, Fall
Distributed Vision Processing in Smart Camera Networks
 Distributed Vision Processing in Smart Camera Networks CVPR-07 Hamid Aghajan, Stanford University, USA François Berry, Univ. Blaise Pascal, France Horst Bischof, TU Graz, Austria Richard Kleihorst, NXP
Distributed Vision Processing in Smart Camera Networks CVPR-07 Hamid Aghajan, Stanford University, USA François Berry, Univ. Blaise Pascal, France Horst Bischof, TU Graz, Austria Richard Kleihorst, NXP
Lab 4- Introduction to C-based Embedded Design Using Code Composer Studio, and the TI 6713 DSK
 DSP Programming Lab 4 for TI 6713 DSP Eval Board Lab 4- Introduction to C-based Embedded Design Using Code Composer Studio, and the TI 6713 DSK This lab takes a detour from model based design in order
DSP Programming Lab 4 for TI 6713 DSP Eval Board Lab 4- Introduction to C-based Embedded Design Using Code Composer Studio, and the TI 6713 DSK This lab takes a detour from model based design in order
DC57 COMPUTER ORGANIZATION JUNE 2013
 Q2 (a) How do various factors like Hardware design, Instruction set, Compiler related to the performance of a computer? The most important measure of a computer is how quickly it can execute programs.
Q2 (a) How do various factors like Hardware design, Instruction set, Compiler related to the performance of a computer? The most important measure of a computer is how quickly it can execute programs.
COMPUTER STRUCTURE AND ORGANIZATION
 COMPUTER STRUCTURE AND ORGANIZATION Course titular: DUMITRAŞCU Eugen Chapter 4 COMPUTER ORGANIZATION FUNDAMENTAL CONCEPTS CONTENT The scheme of 5 units von Neumann principles Functioning of a von Neumann
COMPUTER STRUCTURE AND ORGANIZATION Course titular: DUMITRAŞCU Eugen Chapter 4 COMPUTER ORGANIZATION FUNDAMENTAL CONCEPTS CONTENT The scheme of 5 units von Neumann principles Functioning of a von Neumann
A NOVEL BASED METHOD TO DESIGN A 4G NETWORK AND TO IMPLEMENT IN REAL TIME USING DSP INTERFACE
 aerd Scientific Journal of Impact Factor(SJIF): 3.134 e-issn(o): 2348-4470 p-issn(p): 2348-6406 International Journal of Advance Engineering and Research Development Volume 2,Issue 3, March -2015 A NOVEL
aerd Scientific Journal of Impact Factor(SJIF): 3.134 e-issn(o): 2348-4470 p-issn(p): 2348-6406 International Journal of Advance Engineering and Research Development Volume 2,Issue 3, March -2015 A NOVEL
Real instruction set architectures. Part 2: a representative sample
 Real instruction set architectures Part 2: a representative sample Some historical architectures VAX: Digital s line of midsize computers, dominant in academia in the 70s and 80s Characteristics: Variable-length
Real instruction set architectures Part 2: a representative sample Some historical architectures VAX: Digital s line of midsize computers, dominant in academia in the 70s and 80s Characteristics: Variable-length
ARM ARCHITECTURE. Contents at a glance:
 UNIT-III ARM ARCHITECTURE Contents at a glance: RISC Design Philosophy ARM Design Philosophy Registers Current Program Status Register(CPSR) Instruction Pipeline Interrupts and Vector Table Architecture
UNIT-III ARM ARCHITECTURE Contents at a glance: RISC Design Philosophy ARM Design Philosophy Registers Current Program Status Register(CPSR) Instruction Pipeline Interrupts and Vector Table Architecture
Assembly Language. Lecture 2 x86 Processor Architecture
 Assembly Language Lecture 2 x86 Processor Architecture Ahmed Sallam Slides based on original lecture slides by Dr. Mahmoud Elgayyar Introduction to the course Outcomes of Lecture 1 Always check the course
Assembly Language Lecture 2 x86 Processor Architecture Ahmed Sallam Slides based on original lecture slides by Dr. Mahmoud Elgayyar Introduction to the course Outcomes of Lecture 1 Always check the course
Module 4c: Pipelining
 Module 4c: Pipelining R E F E R E N C E S : S T A L L I N G S, C O M P U T E R O R G A N I Z A T I O N A N D A R C H I T E C T U R E M O R R I S M A N O, C O M P U T E R O R G A N I Z A T I O N A N D A
Module 4c: Pipelining R E F E R E N C E S : S T A L L I N G S, C O M P U T E R O R G A N I Z A T I O N A N D A R C H I T E C T U R E M O R R I S M A N O, C O M P U T E R O R G A N I Z A T I O N A N D A
ELEC4042 Signal Processing 2 MATLAB Review (prepared by A/Prof Ambikairajah)
") Introduction ELEC4042 Signal Processing 2 MATLAB Review (prepared by A/Prof Ambikairajah) MATLAB is a powerful mathematical language that is used in most engineering companies today. Its strength lies
Introduction ELEC4042 Signal Processing 2 MATLAB Review (prepared by A/Prof Ambikairajah) MATLAB is a powerful mathematical language that is used in most engineering companies today. Its strength lies
Computers and Microprocessors. Lecture 34 PHYS3360/AEP3630
 Computers and Microprocessors Lecture 34 PHYS3360/AEP3630 1 Contents Computer architecture / experiment control Microprocessor organization Basic computer components Memory modes for x86 series of microprocessors
Computers and Microprocessors Lecture 34 PHYS3360/AEP3630 1 Contents Computer architecture / experiment control Microprocessor organization Basic computer components Memory modes for x86 series of microprocessors
Speeding AM335x Programmable Realtime Unit (PRU) Application Development Through Improved Debug Tools
 Application Development Through Improved Debug Tools") Speeding AM335x Programmable Realtime Unit (PRU) Application Development Through Improved Debug Tools The hardware modules and descriptions referred to in this document are *NOT SUPPORTED* by Texas Instruments
Speeding AM335x Programmable Realtime Unit (PRU) Application Development Through Improved Debug Tools The hardware modules and descriptions referred to in this document are *NOT SUPPORTED* by Texas Instruments
Advanced Design System 1.5. Digital Filter Designer
 Advanced Design System 1.5 Digital Filter Designer December 2000 Notice The information contained in this document is subject to change without notice. Agilent Technologies makes no warranty of any kind
Advanced Design System 1.5 Digital Filter Designer December 2000 Notice The information contained in this document is subject to change without notice. Agilent Technologies makes no warranty of any kind
Martin Kruliš, v
 Martin Kruliš 1 Optimizations in General Code And Compilation Memory Considerations Parallelism Profiling And Optimization Examples 2 Premature optimization is the root of all evil. -- D. Knuth Our goal
Martin Kruliš 1 Optimizations in General Code And Compilation Memory Considerations Parallelism Profiling And Optimization Examples 2 Premature optimization is the root of all evil. -- D. Knuth Our goal
An Optimizing Compiler for the TMS320C25 DSP Chip
 An Optimizing Compiler for the TMS320C25 DSP Chip Wen-Yen Lin, Corinna G Lee, and Paul Chow Published in Proceedings of the 5th International Conference on Signal Processing Applications and Technology,
An Optimizing Compiler for the TMS320C25 DSP Chip Wen-Yen Lin, Corinna G Lee, and Paul Chow Published in Proceedings of the 5th International Conference on Signal Processing Applications and Technology,
6x86 PROCESSOR Superscalar, Superpipelined, Sixth-generation, x86 Compatible CPU
 1-6x86 PROCESSOR Superscalar, Superpipelined, Sixth-generation, x86 Compatible CPU Product Overview Introduction 1. ARCHITECTURE OVERVIEW The Cyrix 6x86 CPU is a leader in the sixth generation of high
1-6x86 PROCESSOR Superscalar, Superpipelined, Sixth-generation, x86 Compatible CPU Product Overview Introduction 1. ARCHITECTURE OVERVIEW The Cyrix 6x86 CPU is a leader in the sixth generation of high
Statement of Research
 On Exploring Algorithm Performance Between Von-Neumann and VLSI Custom-Logic Computing Architectures Tiffany M. Mintz James P. Davis, Ph.D. South Carolina Alliance for Minority Participation University
On Exploring Algorithm Performance Between Von-Neumann and VLSI Custom-Logic Computing Architectures Tiffany M. Mintz James P. Davis, Ph.D. South Carolina Alliance for Minority Participation University
C55x Digital Signal Processors Software Overview
 C55x Digital Signal Processors C55x Digital Signal Processors Software Overview Agenda C55x Chip Support Library (CSL) Introduction Benefits Structure Example C55x DSP Library (DSPLIB) Introduction Structure
C55x Digital Signal Processors C55x Digital Signal Processors Software Overview Agenda C55x Chip Support Library (CSL) Introduction Benefits Structure Example C55x DSP Library (DSPLIB) Introduction Structure
Floating-Point Unit. Introduction. Agenda
 Floating-Point Unit Introduction This chapter will introduce you to the Floating-Point Unit (FPU) on the LM4F series devices. In the lab we will implement a floating-point sine wave calculator and profile
Floating-Point Unit Introduction This chapter will introduce you to the Floating-Point Unit (FPU) on the LM4F series devices. In the lab we will implement a floating-point sine wave calculator and profile