From RGB to Spectrum for Natural Scenes via Manifold-based Mapping
|
|
|
- Giles Joseph
- 5 years ago
- Views:
Transcription
1 From RGB to Spectrum for Natural Scenes via Manifold-based Mapping Yan Jia 1, Yinqiang Zheng 2, Lin Gu 2, Art Subpa-Asa 3, Antony Lam 4, Yoichi Sato 5, Imari Sato 2 1 RWTH Aachen University, Germany 2 National Institute of Informatics, Japan 3 Tokyo Institute of Technology, Japan 4 Saitama University, Japan 5 University of Tokyo, Japan Abstract Spectral analysis of natural scenes can provide much more detailed information about the scene than an ordinary RGB camera. The richer information provided by hyperspectral images has been beneficial to numerous applications, such as understanding natural environmental changes and classifying plants and soils in agriculture based on their spectral properties. In this paper, we present an efficient manifold learning based method for accurately reconstructing a hyperspectral image from a single RGB image captured by a commercial camera with known spectral response. By applying a nonlinear dimensionality reduction technique to a large set of natural spectra, we show that the spectra of natural scenes lie on an intrinsically low dimensional manifold. This allows us to map an RGB vector to its corresponding hyperspectral vector accurately via our proposed novel manifold-based reconstruction pipeline. Experiments using both synthesized RGB images using hyperspectral datasets and real world data demonstrate our method outperforms the state-of-the-art. 1. Introduction Spectral analysis of natural scenes can provide much more detailed information about the scene than an ordinary RGB camera. The richer information provided by hyperspectral imaging has been beneficial to numerous applications in agriculture and land health surveillance, such as understanding natural environmental changes and classifying plants and soils based on their spectral properties. Most general approaches to imaging the spectra of a scene capture narrowband hyperspectral image stacks at consecutive wavelengths. A number of optical elements are required to achieve this task, and commercially available hyperspectral imaging cameras are often expensive and tend to suffer from spatial, spectral, and temporal resolution issues. The goal of this work is providing a cost-efficient solution for hyperspectral imaging that can reconstruct the spectra of a natural scene from a single RGB image captured by a camera with known spectral response. Obviously, the transformation from RGB to spectra is a three-to-many mapping and thus cannot be unambiguously determined unless some prior knowledge about the transformation is introduced. Indeed, there is existing work that establishes such priors. In the field of spectral reflectance recovery, researchers have examined large sets of spectral reflectance distributions and their corresponding RGB vectors in order to learn how to map from RGB to spectra. Examples include radial basis function (RBF) network mapping [23] and constrained sparse coding [2]. More recently, Arad and Shahar used a large sparse dictionary of spectra and corresponding RGB projections that could then be used as a basis to map RGB vectors to spectra [3]. However, existing approaches directly operate on the RGB space without explicitly exploring the data structure of spectral information, thus requiring a large amount of data for training. We propose a two-step manifold-based mapping and reconstruction pipeline to reconstruct the spectra from a single RGB image. We start by investigating the intrinsic dimensionality of the spectra of natural scenes. By applying a nonlinear dimensionality reduction technique to a large set of natural spectra, we show that the spectra of natural scenes lie on an intrinsically low dimensional manifold. Based on the derived manifold, we learn an accurate nonlinear mapping from RGB to the 3D embedding. By doing so, we reduce the problem of the three-to-many mapping (RGB to spectrum) to a well-conditioned and compact three-to-three mapping (RGB to 3D embedding of spectra). Compared to previous proposed approaches that aim to solve the three-tomany mapping directly, the three-to-three mapping allows us to train a more accurate model. After mapping to the 3D embedding, the original spectrum can be recovered using a manifold-based reconstruction technique

2 Figure 1: Scene spectra are recovered from RGB observation through our proposed nonlinear manifold learning and reconstruction technique based on pre-learned mapping between training RGB values and their corresponding 3D embedding. Our major contributions are summarized as follows: This paper presents a cost-efficient solution for hyperspectral imaging that requires only a single RGB image of a scene captured by a camera with known spectral response. We investigate the intrinsic dimensionality of the spectra of natural scenes by a nonlinear dimensionality reduction technique. We find that natural scene spectra approximately reside in a 3D embedded space. We propose a two-step manifold-based mapping and reconstruction pipeline that avoids solving the difficult three-to-many mapping problem. Namely, we transform any given RGB vector to a 3D point in the embedding of natural spectra. From there, the corresponding spectrum is recovered using a manifold-based reconstruction technique. 2. Related Work Hyperspectral imaging has proven beneficial to many applications in agriculture, remote sensing, medical diagnosis, and others. As a result, there is a large body of work on hyperspectral imaging of scenes. Approaches such as push broom scanning a spatial line or switching narrow bandpass filters in front a grayscale camera [14] for each wavelength of interest are in common use. However, these imaging approaches are slow. In response to issues with speed, snapshot hyperspectral cameras have been developed [5, 10, 13, 27]. Despite the better speed, spectral resolution is typically sacrificed. In addition, all hyperspectral cameras usually have lower spatial resolution than typical RGB cameras. Thus there have also been efforts at combining hyperspectral and RGB cameras together [1, 6, 17, 12]. In these setups, the RGB and hyperspectral camera are made to share a common field-of-view. The spatial and spectral information from both cameras are then combined to form a high-spatial resolution, hyperspectral image. All the different kinds of hyperspectral camera setups have their own pros and cons but a common drawback is that they are often expensive and not as accessible. Thus there have been attempts to use conventional RGB cameras to capture the spectral information of a scene, in particular, the spectral reflectance of scene points. One general approach is to use active lighting [8, 15, 19, 24] by taking advantage of the well-known statistical property that spectral reflectance seen in natural scenes mostly exists in a low-dimensional linear subspace of the high-dimensional space of arbitrary spectral reflectance [9, 21, 25, 16, 22, 4]. In these approaches using active lighting, an RGB or grayscale camera is used to capture multiple images of a scene under controlled lighting. By carefully defining the light spectra used and knowing the camera spectral response, it is possible to recover the spectral reflectance of surface points. However, this does not work in outdoor settings or in a number of everyday situations where the illumination cannot be controlled. Also, sometimes the lighting condition of a given environment is of interest. For more widespread applicability, passive imaging approaches are preferred. In addition, it would be good to be able to capture hyperspectral images without any specialized equipment. Thus some researchers have proposed approaches for reconstructing the hyperspectral image of a scene from a single RGB image by learning a mapping from RGB vectors to spectra using a large set of spectral reflectance distributions and their corresponding RGBs. Nguyen et al. proposed to learn the transformation from white balanced RGB values to illumination-free reflectance 4706
3 spectra based on a radial basis function (RBF) network mapping [23]. Antonio proposed to learn the prototype set from the database based on a constrained sparse coding approach and use it for illumination-free spectral recovery [2]. More recently, Arad and Ben-Shahar created a large database of natural scene hyperspectral images and derived a sparse dictionary of hyperspectral signatures and their RGB projections. The dictionary and corresponding RGB projections could then be used as a basis to estimate the spectrum of any given RGB vector [3]. These approaches tackled a difficult inverse problem involving a three-to-many mapping, and thus priors needed to be established for effective learning. This is typically accomplished by using large amounts of training data. Our method is different from previously proposed ones in the sense that we avoid directly solving a three-to-many mapping of the RGB vector to spectrum. Specifically, we propose a two-step manifold-based mapping and reconstruction pipeline by considering the intrinsic dimensionality of natural scene spectra. This leads to a formulation of the problem where we can map an RGB vector to a spectrum as a well-conditioned three-to-three mapping (RGB to 3D embedded spectra). The original spectra can then be recovered via low-dimensional manifold reconstruction. 3. Spectral Reconstruction of Natural Spectra via Manifold-based Nonlinear Mapping This paper focuses on recovering the spectra of outdoor scenes under daylight illumination from a single RGB image captured by a camera with known spectral response. Fig. 1 shows the flow of our method for spectral reconstruction. Our method consists of training and testing stages, which are indicated using black and red arrows, respectively in the figure. In the training stage, given a large set of natural spectra, we first investigate the intrinsic dimensionality of natural scene spectra using a nonlinear dimensionality reduction technique (Sec. 3.1). Specifically, we show that the spectra of natural scenes lie on an intrinsically low dimensional manifold. At the same time, for each spectrum in the database, a corresponding RGB vector is computed based on the spectral responses of the RGB camera. Once the set of RGB and spectrum pairs is prepared, a transformation from RGB vectors to their corresponding three dimensional embedded spectra is learned (Sec. 3.2). In the testing stage, we can first transform an input RGB vector into the three dimensional embedding using the learned transformation. Once the RGB vector is transformed into a 3D point in the embedding, the original spectrum is reconstructed from a manifold-based reconstruction technique (Sec. 3.3). In the following, we describe each step of our method in detail Analyzing Dimensionality of Natural Scene Spectra It has been widely examined and accepted that the reflectance spectra of natural objects lie in a low-dimensional subspace or manifold [9, 21, 25, 16, 22, 4]. This leads us to speculate that spectra of natural scenes are intrinsically low-dimensional as well, since the radiance of a scene point is a compound of the illumination and surface reflectance [2, 23]. Specifically, by assuming that the scene point is diffuse, its radiancei(λ) can be roughly expressed by i(λ) = l(λ)r(λ), (1) in which l(λ) and r(λ) denote the illumination and reflectance intensity at wavelength λ. By stacking all spectra of a hyperspectral image into a matrixi, we obtain i 1 (λ 1 ) i M (λ 1 ) I = i 1 (λ N ) i M (λ N ) l(λ 1 ) 0 0 r 1 (λ 1 ) r M (λ 1 ) = 0 0, 0 0 l(λ N ) r 1 (λ N ) r M (λ N ) }{{}}{{} L R (2) in which M and N denote the number of pixels and the number of bands, respectively. From the viewpoint of linear algebra, the rank of I should be no greater than that of R, which is low-dimensional for natural reflectance materials. For real natural scenes, the model in Equation 2 may not hold accurately because of complex surface reflectance properties. Therefore, we follow a widely used criterion [26], the residual variance of dimensionality reduction, to determine the intrinsic dimensionality of natural scene spectra. At first, Isometric Feature Mapping (Isomap) [26], a nonlinear dimensionality reduction method, was applied on the natural scene spectra to embed them into a low dimensional space. Isomap estimates the intrinsic geometry of a data manifold by examining a neighborhood graph of the data points constructed in high-dimensional space. This neighborhood graph is used for computing pairwise geodesic distances between two points measured over the manifold. Once a matrix containing the geodesic distances between all data points is obtained, classical MDS is applied to this matrix to find a low-dimensional embedding of the data points such that the estimated intrinsic geometry is best preserved through dimensionality reduction. By following the procedure of [26], we calculate the residual variance1 R 2 (D m,d gt ), whered m is the matrix of Euclidean distances of the low dimensional embedding, while D gt is the graph distance matrix of the input data. R is the standard correlation coefficient between D m and D gt. The intrinsic degrees of freedom is then observed at the elbow 4707
4 (a) 100 spectra (b) 3000 spectra Figure 2: The residual variance of Isomap on representative spectra from [3]. (a) 100 representative spectra from [3], (b) 3000 representative spectra from [3]. where the curves of residual variance stop decreasing significantly with the added dimensions as illustrated in Fig. 2. We refer to Tenenbaum et al. [26] for details. With this criterion, we conducted a dimensionality analysis of spectra of natural scenes on the natural hyperspectral image database 1 provided by Arad and Ben-Shahar [3], which is the largest spectral database for natural scenes available today. In Fig. 2, we report the residual variance on (a) 100 main representative spectra picked up by k-means from [3] and (b) another 3000 representative spectra collection from [3]. This figure shows that Isomap detects the dimensionality as three where the residual variance is almost zero on both 100 representative spectra and 3000 spectra. This observation echoes the existing research on the sparsity of natural scenes. However, it worth noting that the spectral sampling resolution of this dataset is 10 nm, which has left out finer spectral details Conversion from RGB to 3D Embedding of Scene Spectra After finding the low dimensional embedding of natural scene spectra, a mapping f is learned between RGB vectors and their corresponding 3D embedded natural scene spectra as: f : R 3 R 3. Through experimental validation, we employ the compact neural network (a radial basis function with 10 hidden neurons) to learn a nonlinear transformation f between RGB vectors and their corresponding 3D embedded spectra. We used the Levenberg-Marquardt training algorithm [18, 11], which minimizes the following equation: ˆβ = argmin β m [y i f(p i,β)] 2, (3) i=1 where each p,y R 3 is a pair of RGB vector and corresponding 3D embedded spectrum in the training set, and β is the parameter to be found for the model f(p,β) to fit the training pairs (p i,y i ), so that the sum of the squares of the deviations is minimized Spectra Reconstruction from 3D Embedding The main focus of dimensionality reduction techniques is how to efficiently reduce the dimensionality of high dimensional inputs by revealing meaningful structure hidden in the data. Many nonlinear dimensionality reduction techniques thus rarely consider the inverse problem of reconstructing original data from the derived low dimensional embeddings. In order to reconstruct original spectra from its 3D embedding, we employ a dictionary learning based technique [29] that learns dictionary pairs for high and low dimensional spaces and uses their relationship for reconstruction of high dimensional data from a point in the embedding. Let x i R N 1 denote a high dimensional spectrum and g(x i ) = y i R 3 1 denote the 3D embedding of the spectrum. Then we wish to find a high dimensional dictionary D H = [d 1,,d K ] and coding scalars c i = [c 1i,c 2i,,c Ki ] T such that these two functions are minimized 2 : M K g(x i ) c ji g(d j ) 2 M K 2, x i c ji d j (4) i=1 j=1 i=1 j=1 for all M spectra in our training dataset. By doing so, we are essentially finding a common coding between the 3D embedding and high dimensional space of the spectra. Then given the estimated coding C = [c 1,c 2,,c M ] and all embeddings Y = {y 1,,y M }, we can determine the 3D embedding dictionaryd L by: min D L Y D L C 2 F. (5) For a new point in the low dimensional space y t, we can compute its codingc T over the low dimensional dictionary D L. Then the high dimensional data of y T can be reconstructed asx T = D H c T. 4. Experiment Results In this section, we evaluate our manifold based mapping on both public hyperspectral datasets [3, 28, 7] and real world images. The dataset in [3] comprises of 200 images, which is by far the most comprehensive natural hyperspectral database. Similarly, the Harvard Outdoor Dataset [7] consists of 50 outdoor images in daylight illumination. Though our method is based on low dimension assumptions about natural spectra, the comparison on the indoor dataset CAVE [28], which has 64 images of indoor scenarios, is also conducted. The three datasets cover complex scenarios including various materials, multiple illuminations and shadows. We use the learned mapping to recover the spectra 2 See [29] for details. 4708
5 Datasets [3] Harvard [7] CAVE [28] Our 3.60 ± ± ± [23] ± ± ± [3] 6.54 ± ± ± Table 1: The average and variance of (%) of reconstruction on the hyperspectral databases [3, 7, 28]. of simulated and real RGB images. We quantitatively compare our method with [23] and [3]. To further validate the robustness of our method, we also evaluate the performance under different parameter settings Training Data and Parameter Settings In default, for each database, we randomly split half of the images as training set and the rest for testing. To avoid over-fitting, we also report the performance on a smaller training set in Section 4.3. Since some of these images contain large dark background areas, naive acquisition of our hyperspectral training set by randomly sampling these images is likely to produce a biased result where the genuine hyperspectral information is severely underrepresented. To resolve this issue, we randomly pick 1000 spectra from each image in the training set, and use the K-means algorithm [20] to collect the most dominantw spectra for the training set. We setw to be 100 in all our experiments. The camera spectral response function we used here to synthesize RGB values is from the Canon 5D Mark II. A radial basis function neural network with 10 hidden neurons is used to map the RGB values to the embedding of dimensionality of 3 unless explicitly stated otherwise. To verify the quantitative accuracy for spectral reflectance reconstruction, we use the normalized root mean square deviation () as our metric, calculated by ǫ r(x) = λ (r(λ,x) rgt(λ,x))2 N r(x), wherer(λ,x) andr gt (λ,x) are the reconstructed and actual spectral reflectances of the pixel x, r(x) is the average value across wavelengths for spectrum x. N is the number of bands in the pixel. normalizes each ground truth spectrum to avoid bias toward strong signals Evaluation on Hyperspectral Datasets We first compare the spectra reconstruction performance on the three aforementioned hyperspectral image databases [3, 28, 7]. The trained nonlinear mapping is used to recover hyperspectral images from the RGB images in the testing sets. In Table 1, we present the quantitative comparison of our method, [23] and [3] for the whole testing sets. This table shows our method outperforms the alternatives in terms of spectra reconstruction accuracy. We note that, though CAVE is an indoor dataset that does not strictly follow our assumptions about natural spectra, our method still manages to achieve superior performance over alternative methods. We also present Fig. 3, which shows the recovered spectra for three randomly selected pixels from three test images. We can see that the performance of our method is consistently better than that of [23] and [3]. To examine the spatial consistency of the recovered hyperspectral images, we also present some images at seven different wavelengths as exemplary images in Fig. 4. We can observe that the recovered images from our method are consistently accurate across the wavelength axis, irrespective of the scene materials. Our method performs particularly well on the 460nm and 500nm bands where the alternatives often encounter much error. We also note that the performance of all methods deteriorate at the 420nm band. The reason is that the camera response is very weak at the blue end, and the inaccuracy in mapping has a critical influence on the recovery results. In Fig. 5, we also show the typical scenarios where our method gives best and worse performance in terms of NMRSD between the reconstructed spectra and the ground truth. Our method works best in the scenarios where artificial materials such as buildings occupy much of the image. It might be due to the fact that artificial materials have similar chemical compositions and thus exhibit similar spectra. In contrast, our performance fails when the image is over/under exposed, like in the first image of the second row. Natural objects such as plants also present challenges. However, especially among challenging scenarios, our method consistently generates better reconstruction compared to the alternatives Analysis on Parameter Sensitivities To demonstrate the robustness of our algorithm, we also analyze the sensitivity of our method to the size of the training set, the manifold dimensionality and the swap of camera response functions. When trained with only 60 images in [3], our method still achieves a satisfactory average NMRSD 4.18%, compared to 3.60% that is trained with 100 images as reported in Section 4.2. As analyzed in Section 3.1, we observed that the dimensionality of three is sufficient in representing the natural spectra. To evaluate this observation in our system, we calculate the reconstruction errors on [3], when mapping the RGB values to the embedding of dimensionality of 4 and 5, rather than 3 used in all other experiments. We found that the average increases as the dimensionality goes up, which is 3.60% for 3 dimensions, 3.94% for 4 dimensions and 4.01% for 5 dimensions. Adding more dimensions seems to be detrimental to accuracy, because it might introduce noises into the RGB to spectrum learning process. Our experiments also show the robustness over various camera spectral response functions. For the dataset [3], the 4709
6 bgucamp Lehavim nachal Figure 3: Experiment results on three testing images in the hyperspectral database [3]. The spectral distributions for three randomly selected pixels from each test image are shown in every column. average of our method is 4.42% on the NikonD90 and 3.94% on the Olympus EPL2. To further demonstrate the robustness against swapping camera response functions, we also train the model with one camera and then reconstruct the hyperspectral data from RGB images simulated by another camera from the dataset [3]. We find the performance between some pairs from the same camera manufacturer, such as Canon20D and Canon5D Mark II, is still reasonable, with an average of 7.87%. However, for the pair between different manufacturers such as Canon1D Mark III and Nikon D90, it will deteriorate to 13.9% Real Images We also use a commercial Nikon D4S camera to capture some images of outdoor scenes (see Fig. 6 (a,b) for examples). To alleviate the influence of camera nonlinear intensity response and unexpected image compression, we use instead the RAW files and convert them into RGB images. The camera spectral response function is provided by the sensor maker. For this specific response function, we learn a nonlinear mapping again by using the aforementioned training set, and use it to recover spectra from RGB values. Fig. 6(c) show the recovered spectra for the four color patches from our method, [23] and [3]. We can see that our method works better than the others, which verifies again the benefits in accounting for the intrinsic dimensions of natural spectra. We also note that, compared with the synthetic experiments, the performance of three methods slightly degrades. This might be attributed to the error in the camera spectral response function. 4710
![ECCV16[3]](/docs-images/91/107374428/images/7-0.jpg)
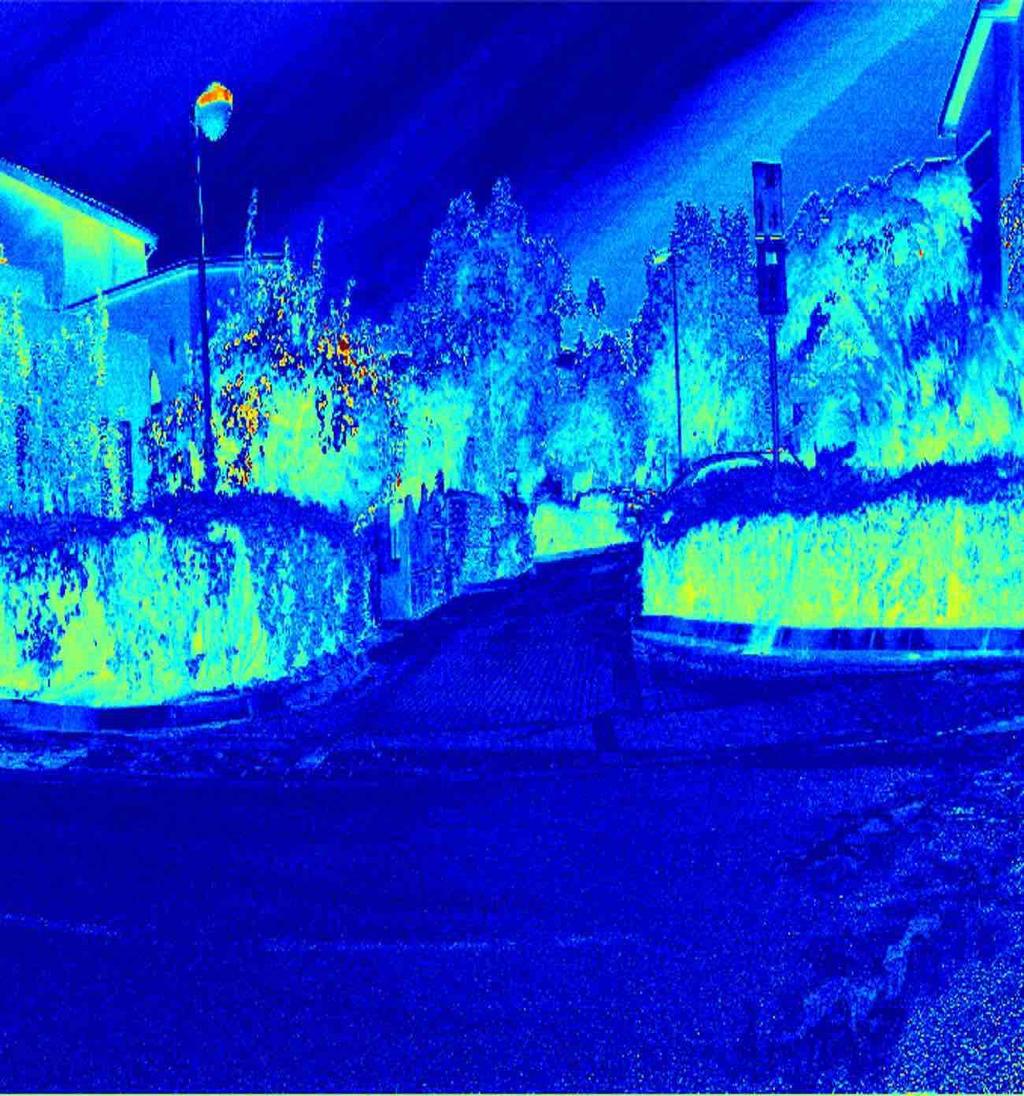
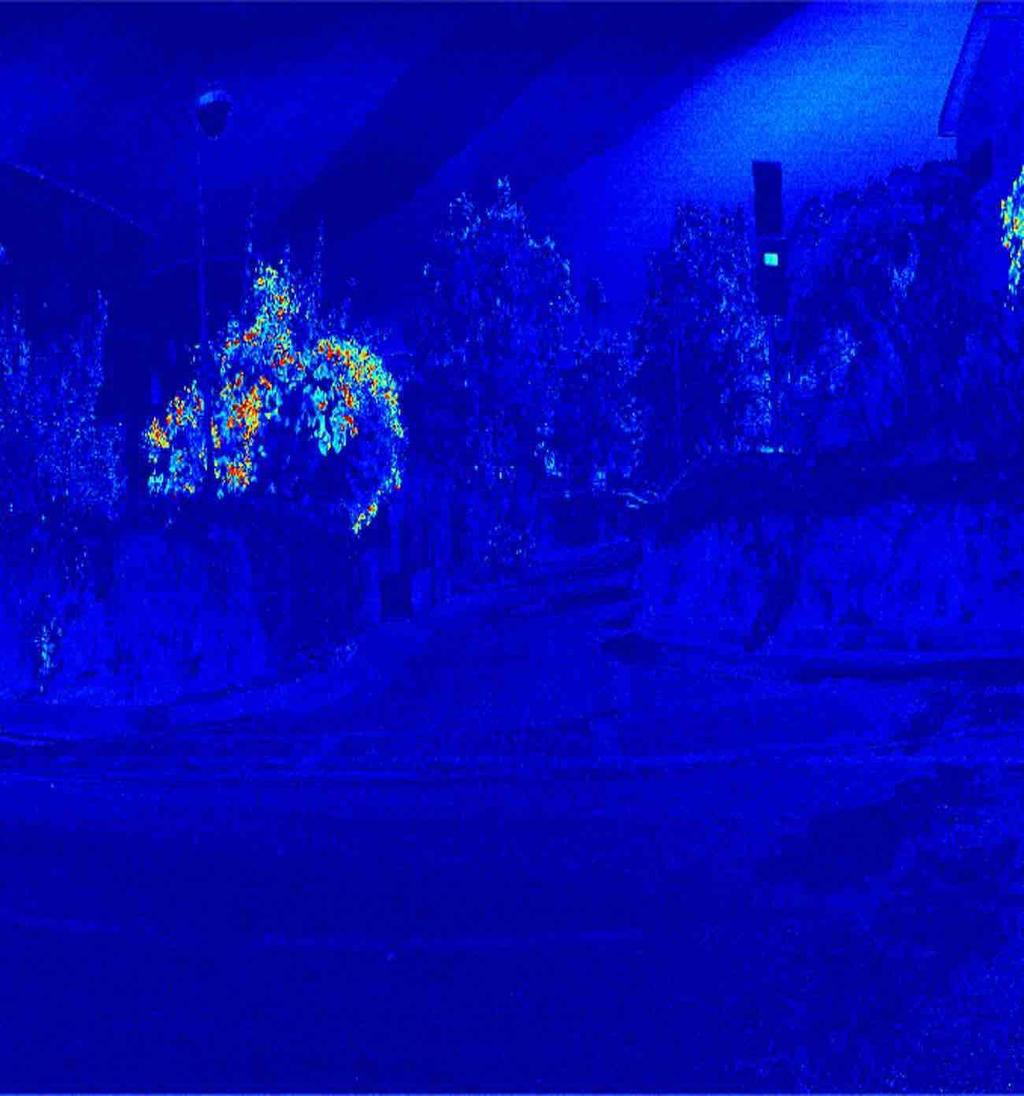


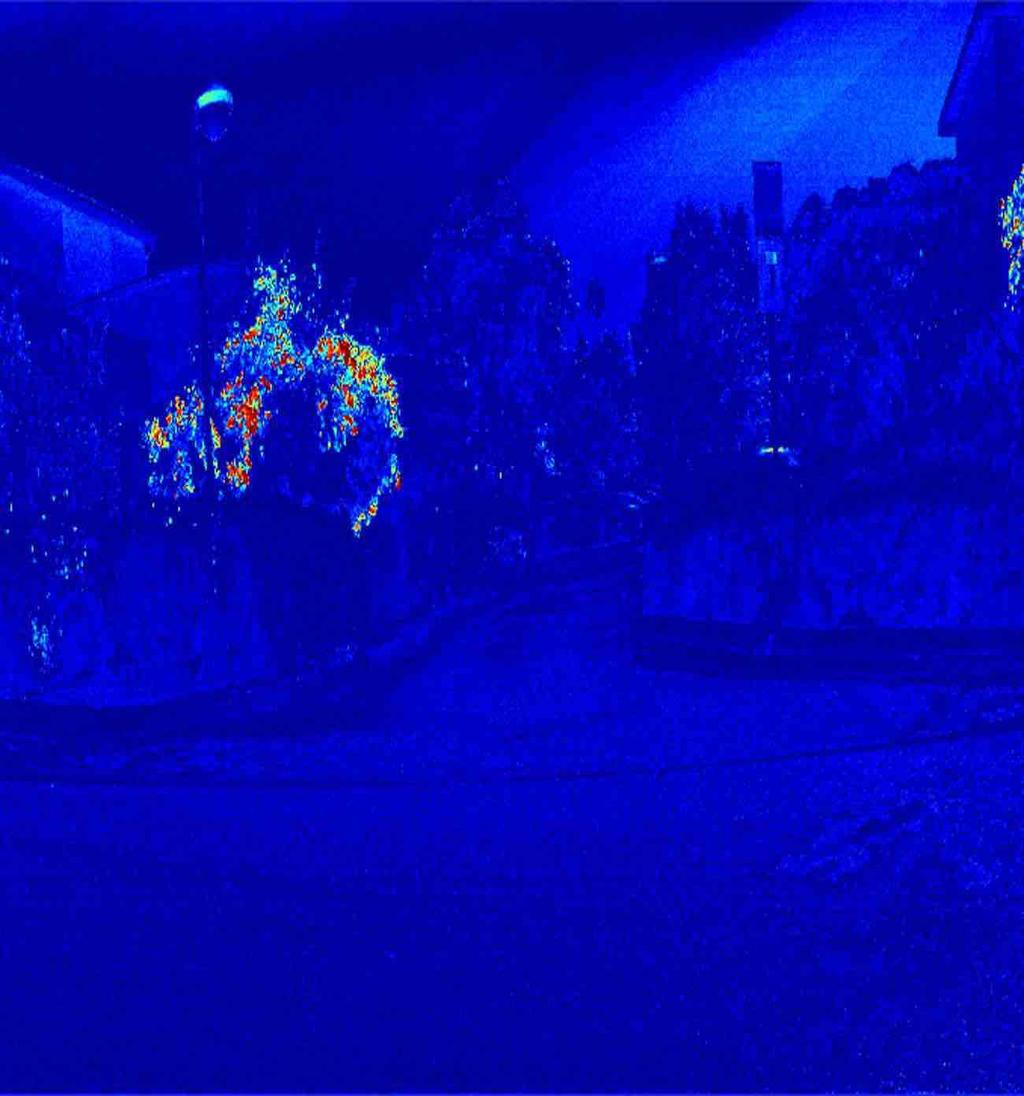
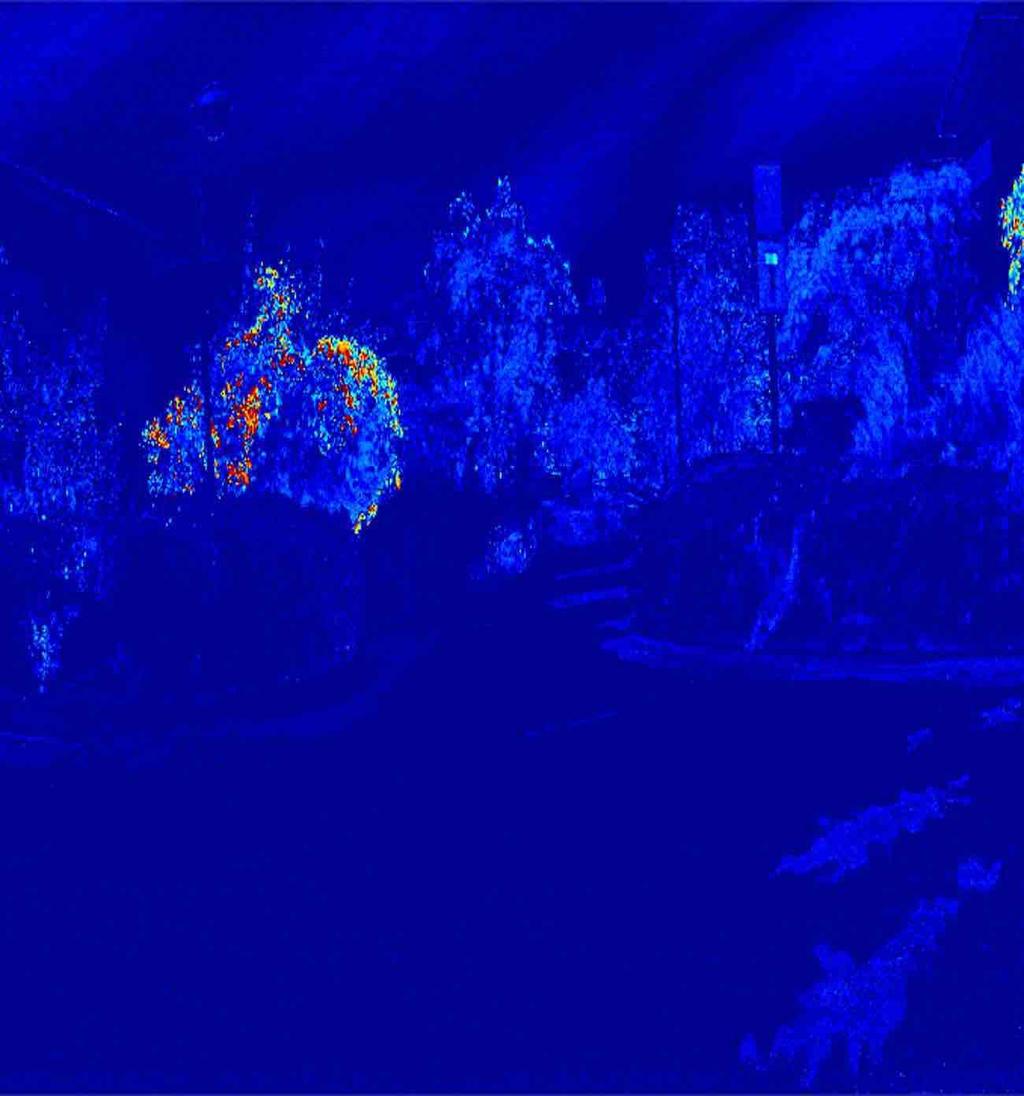


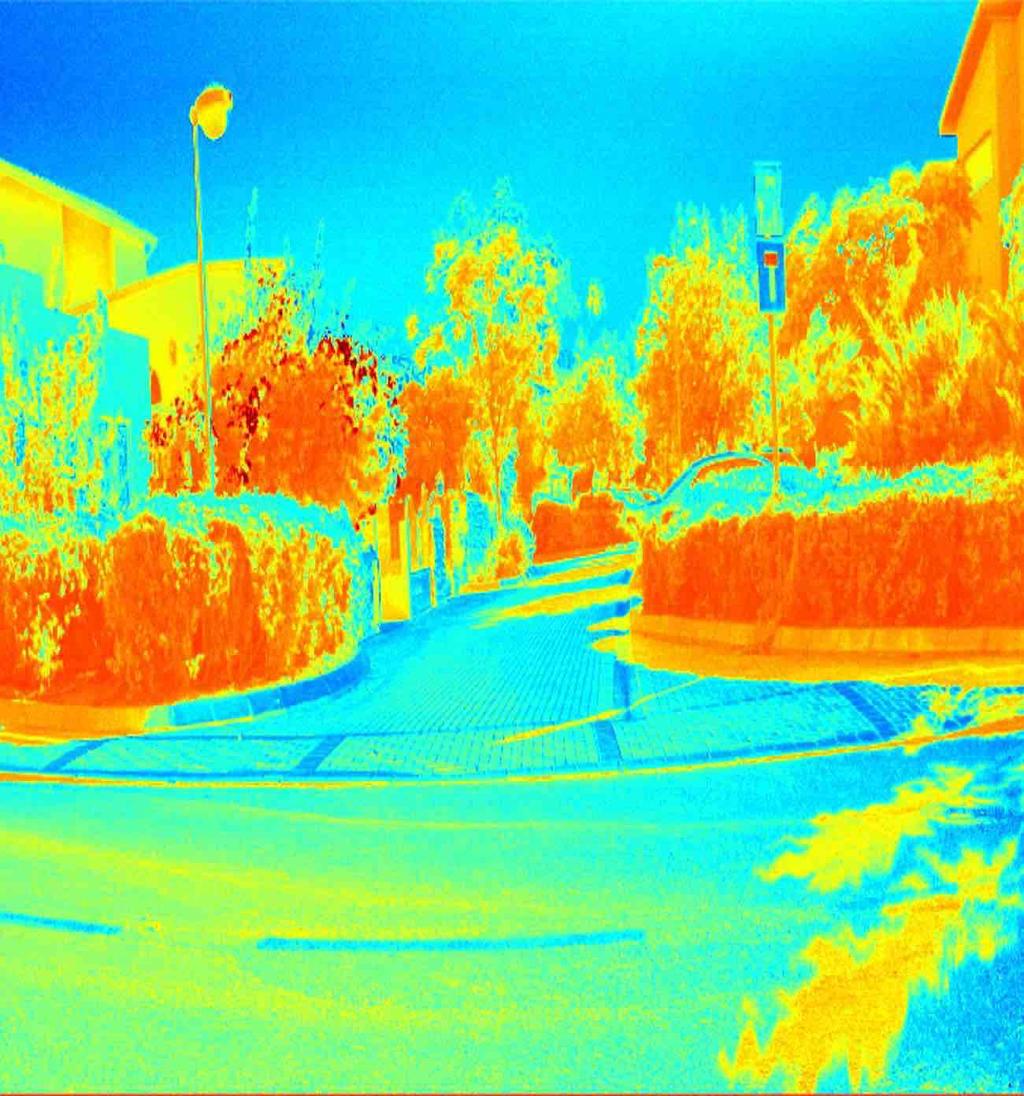
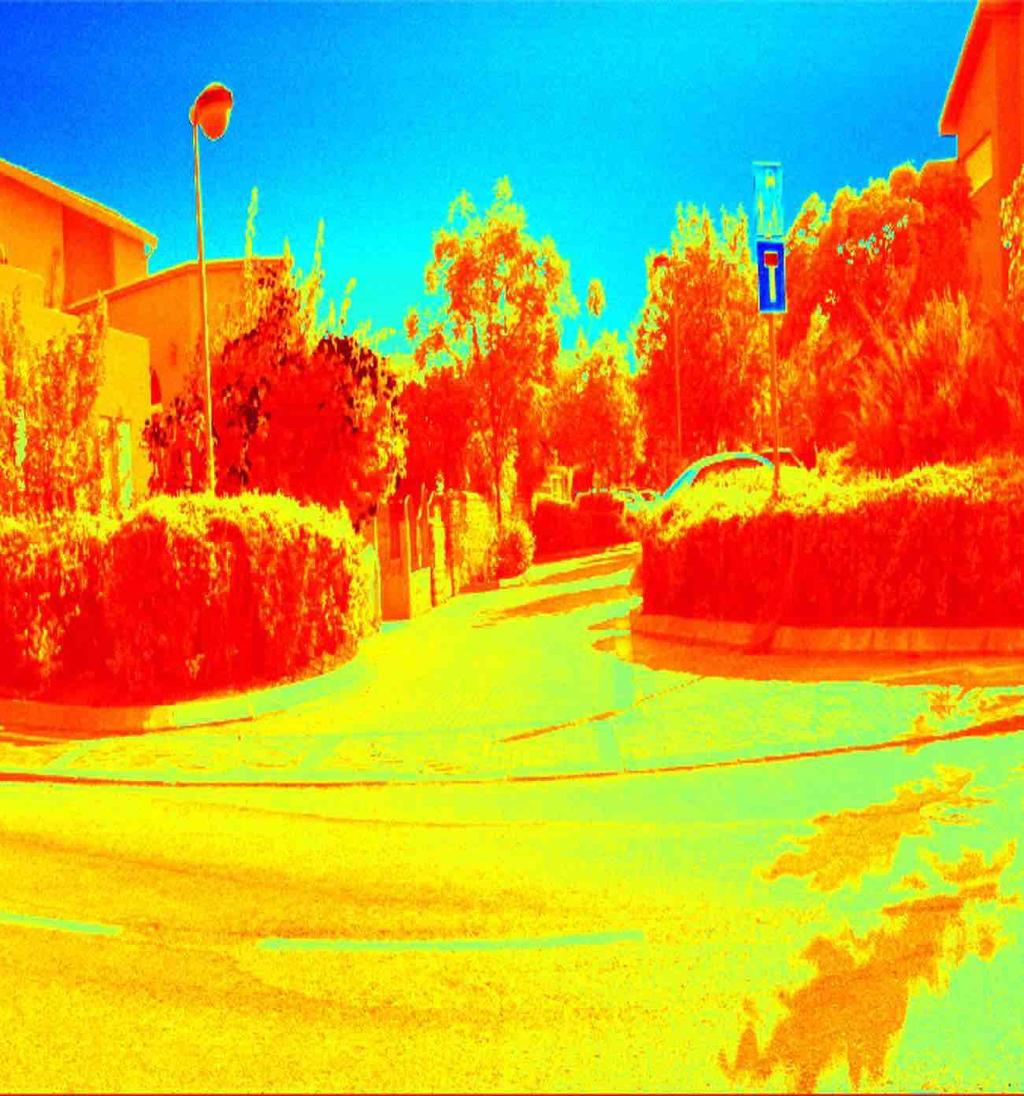
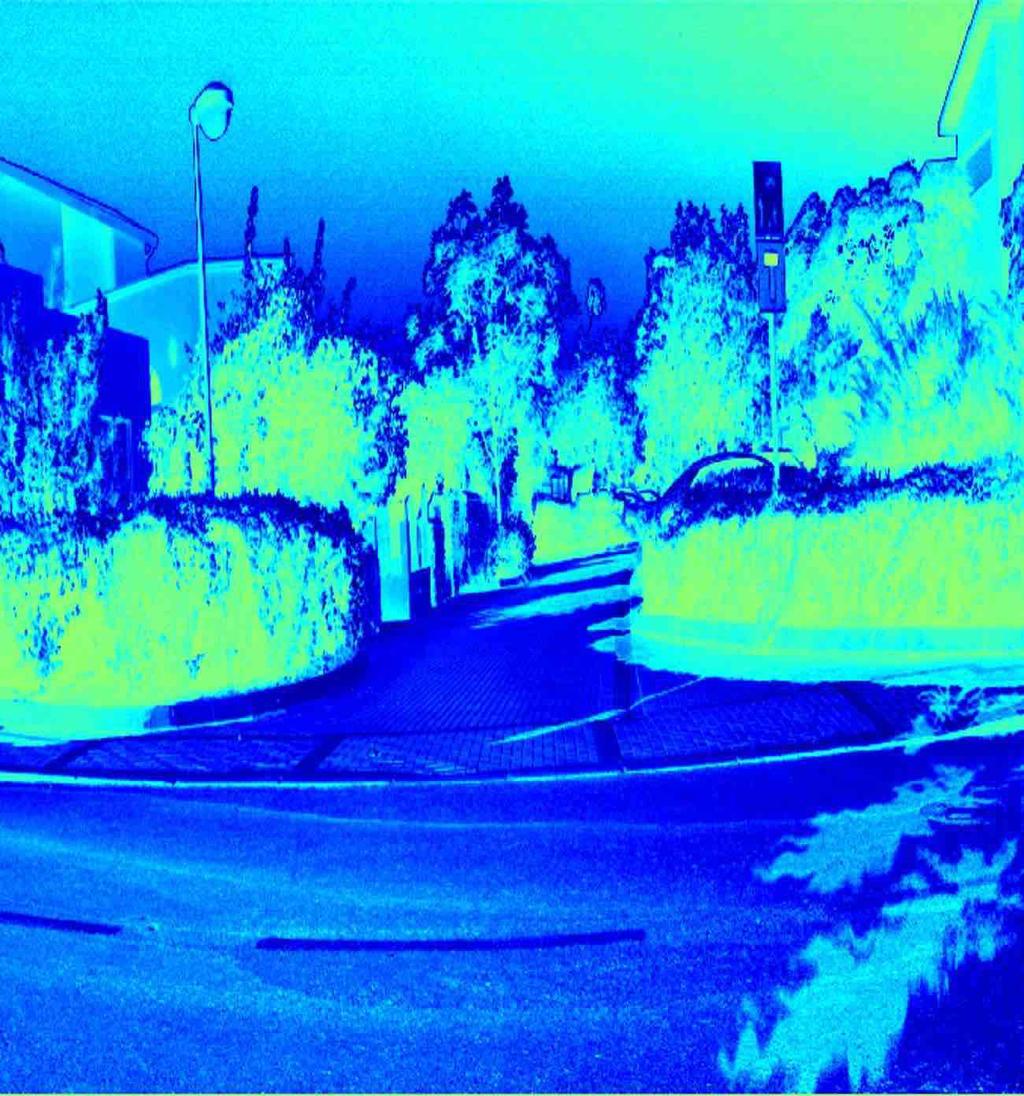


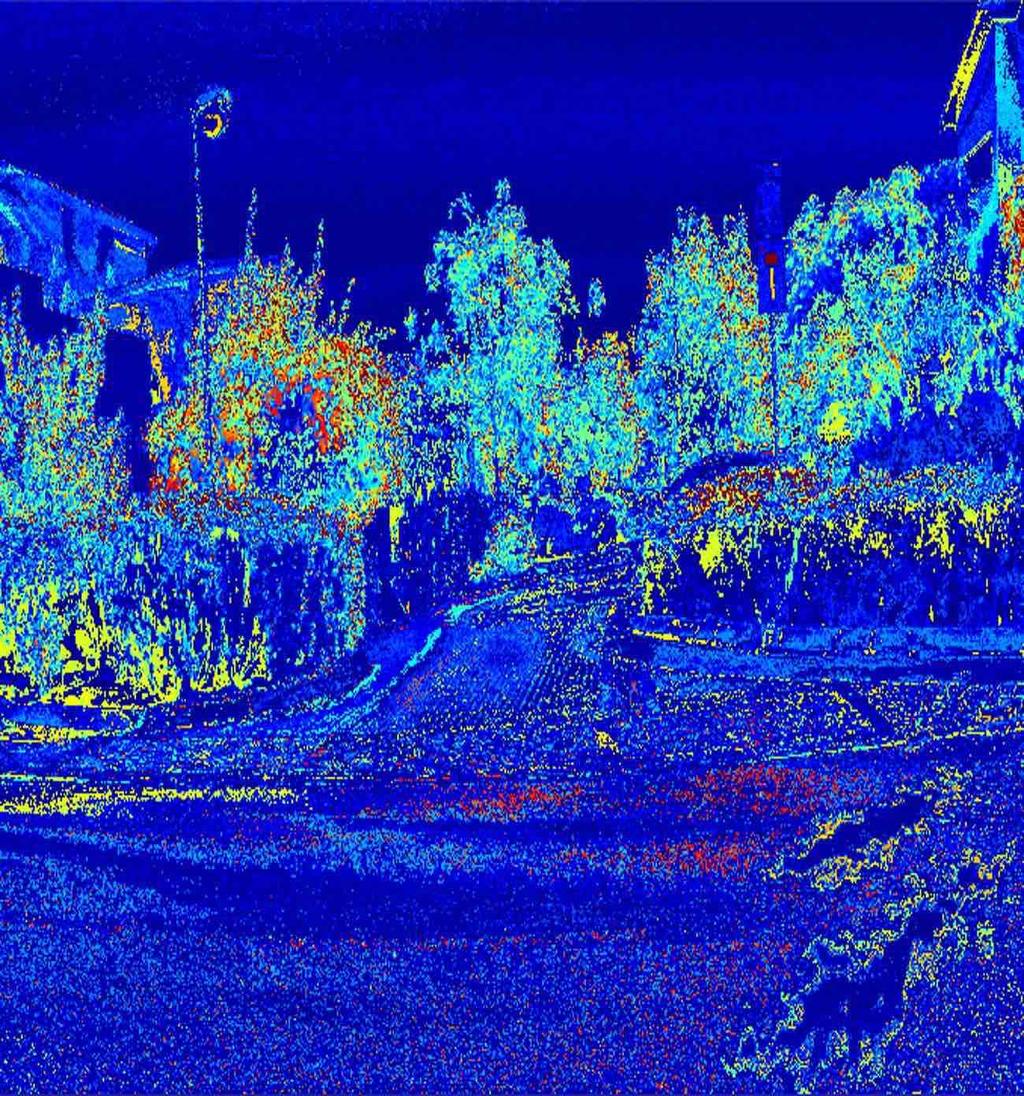
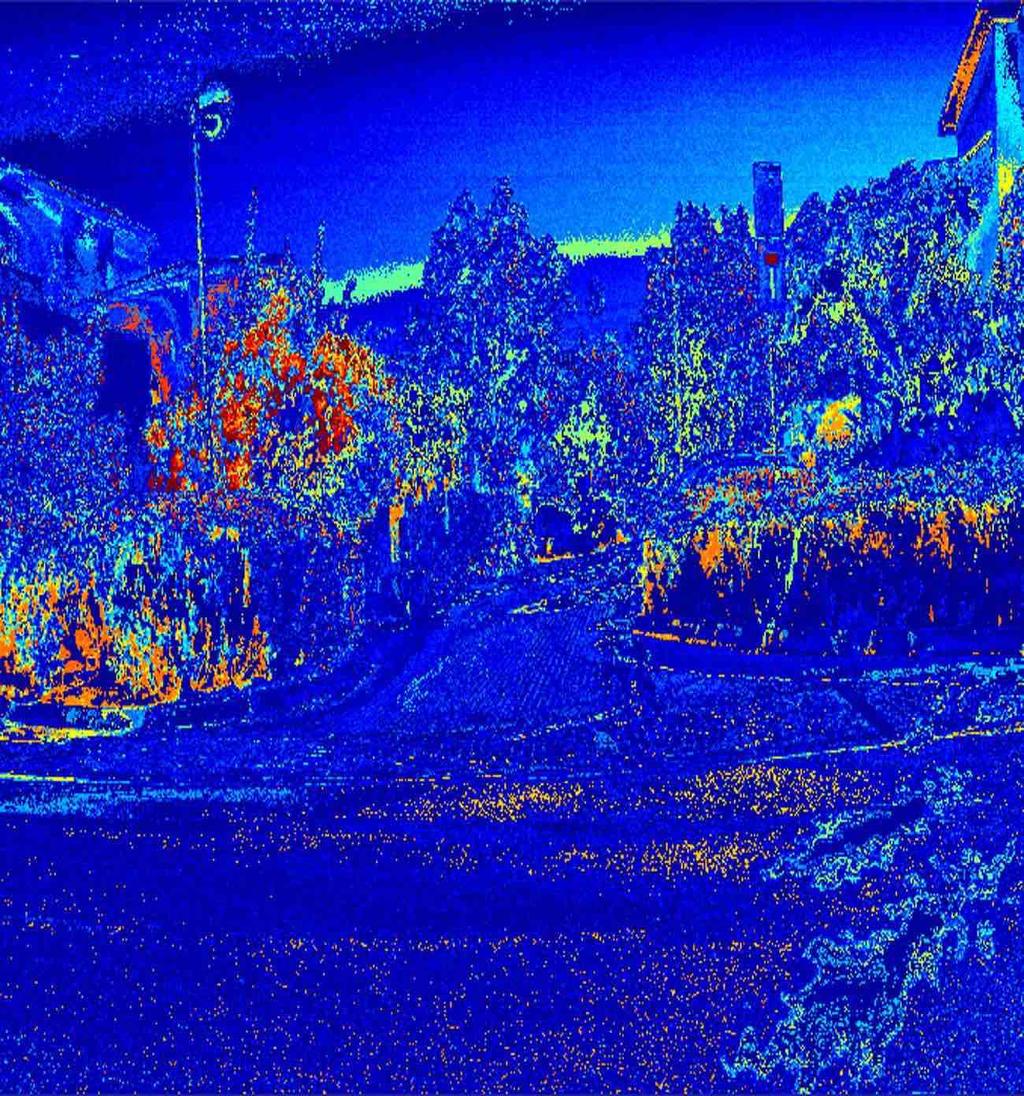
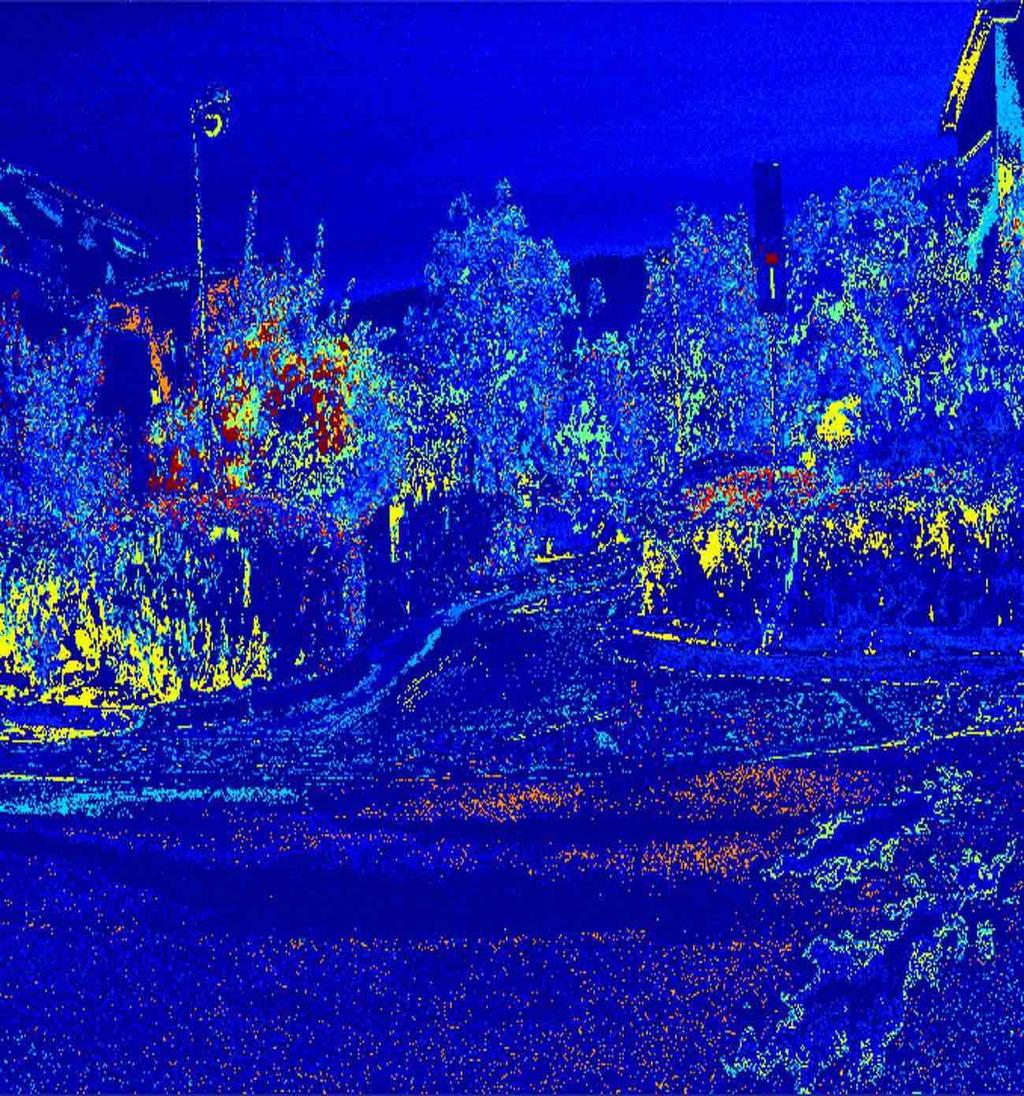


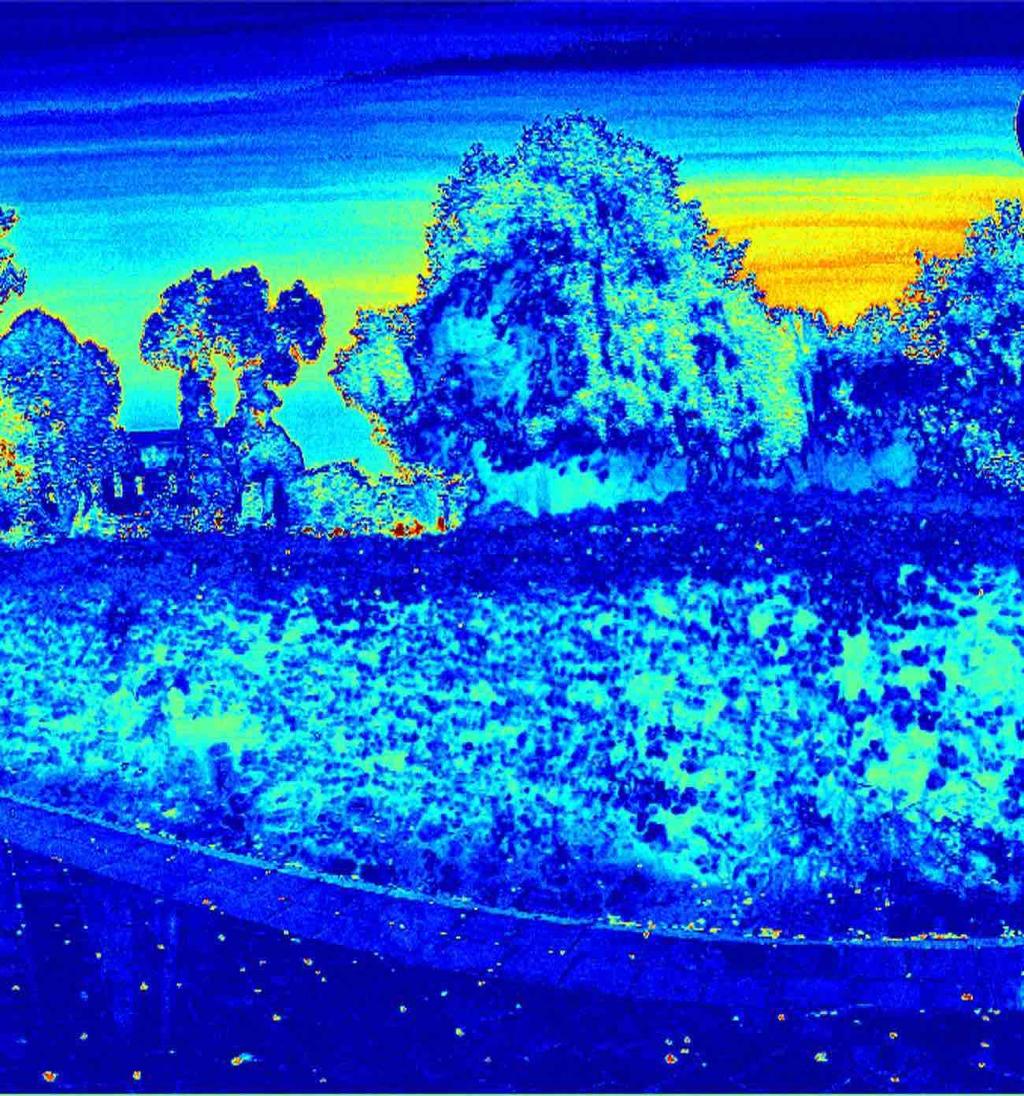
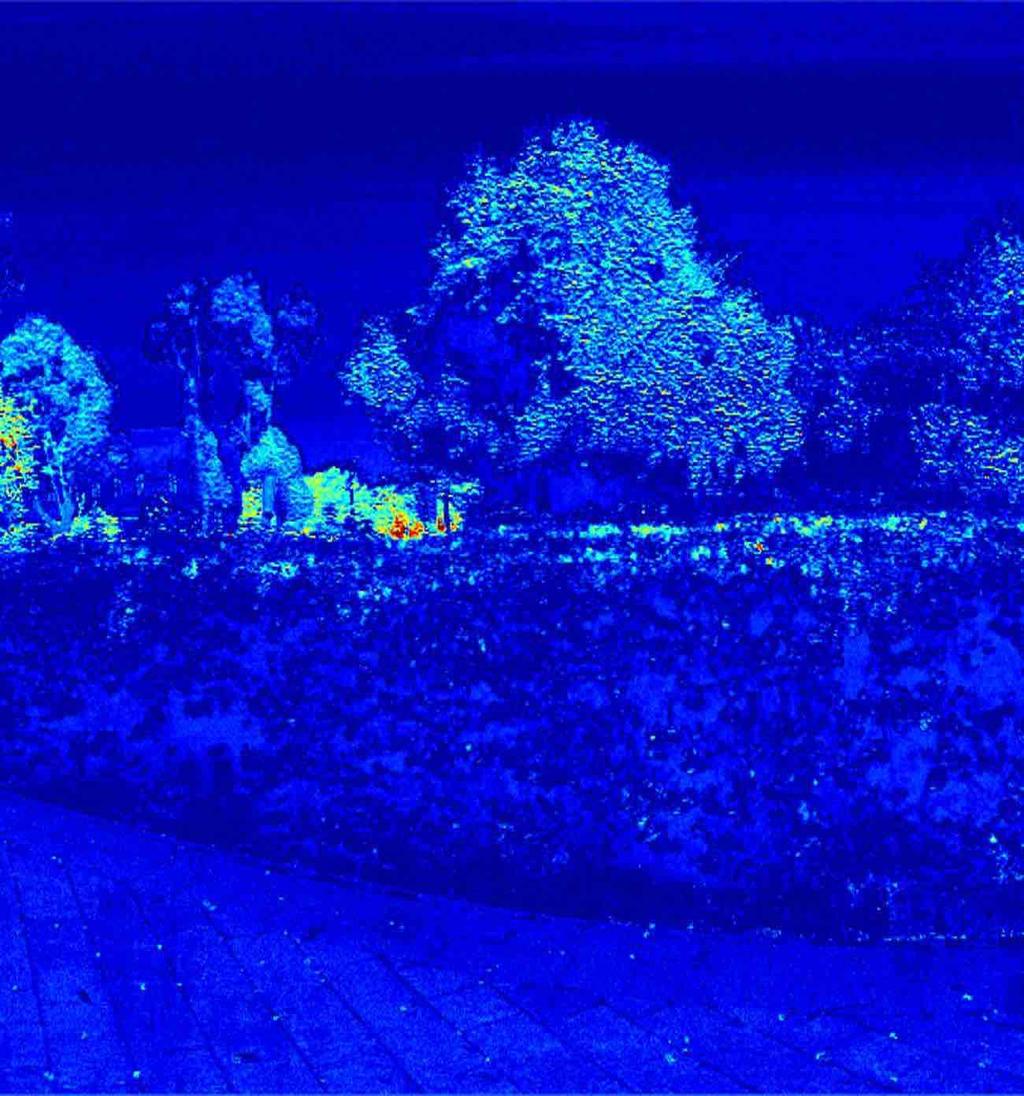






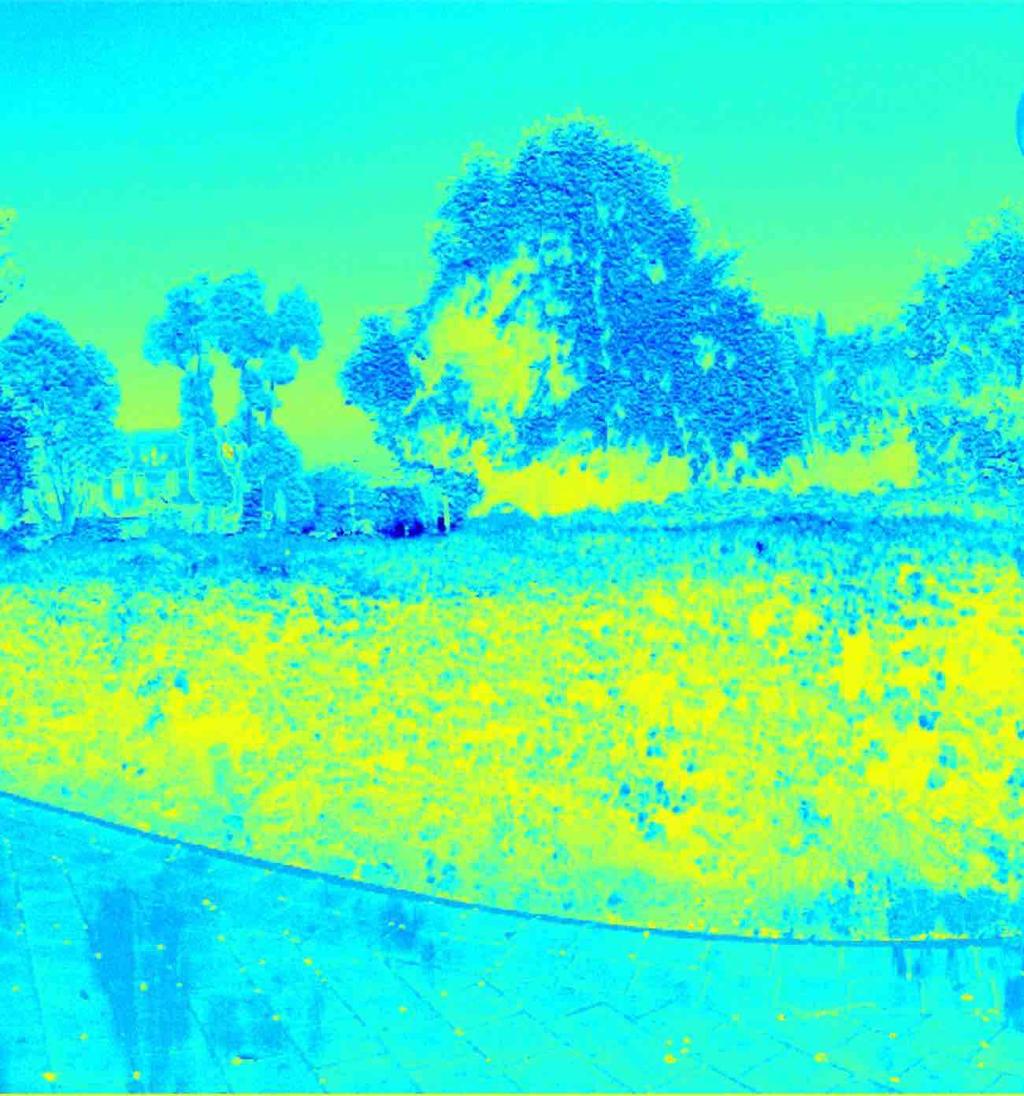
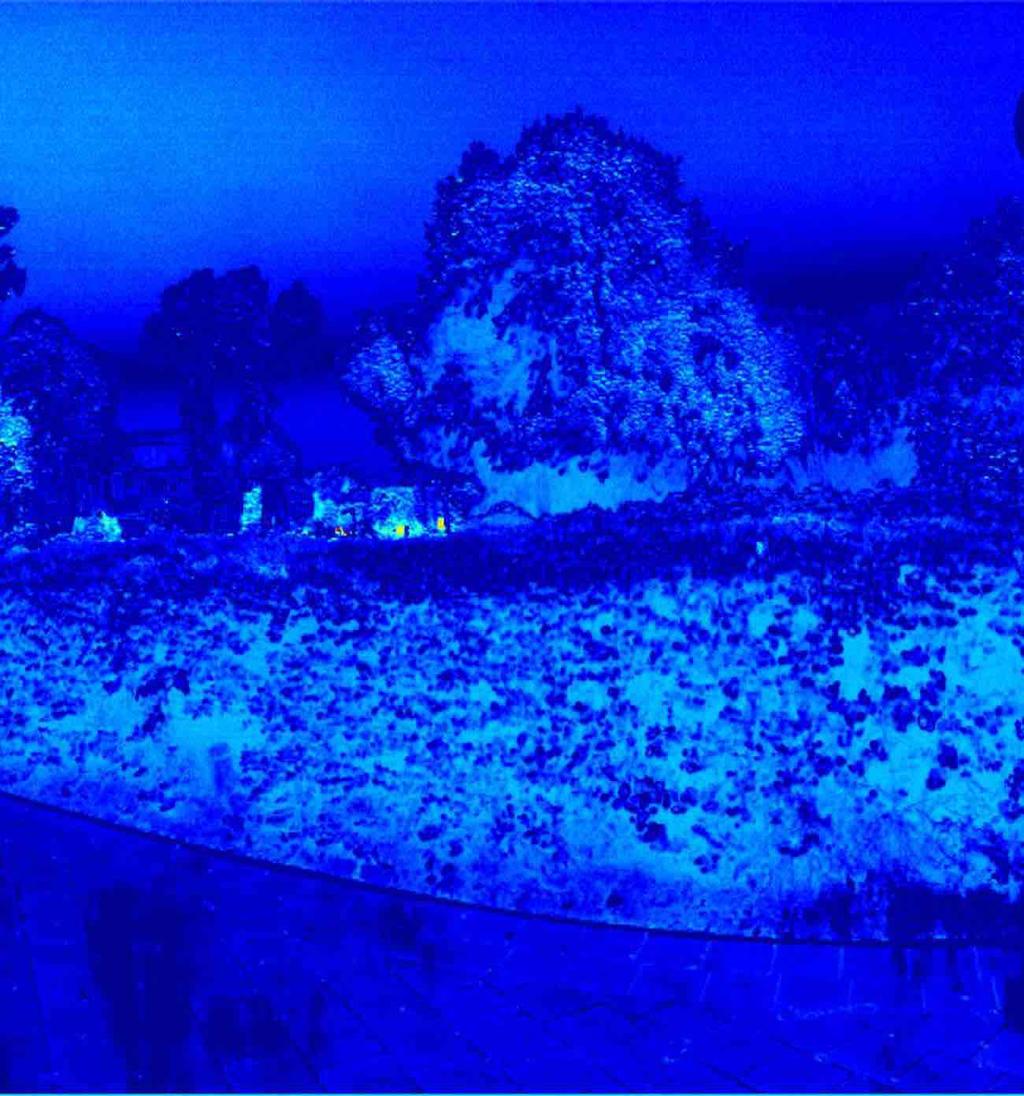


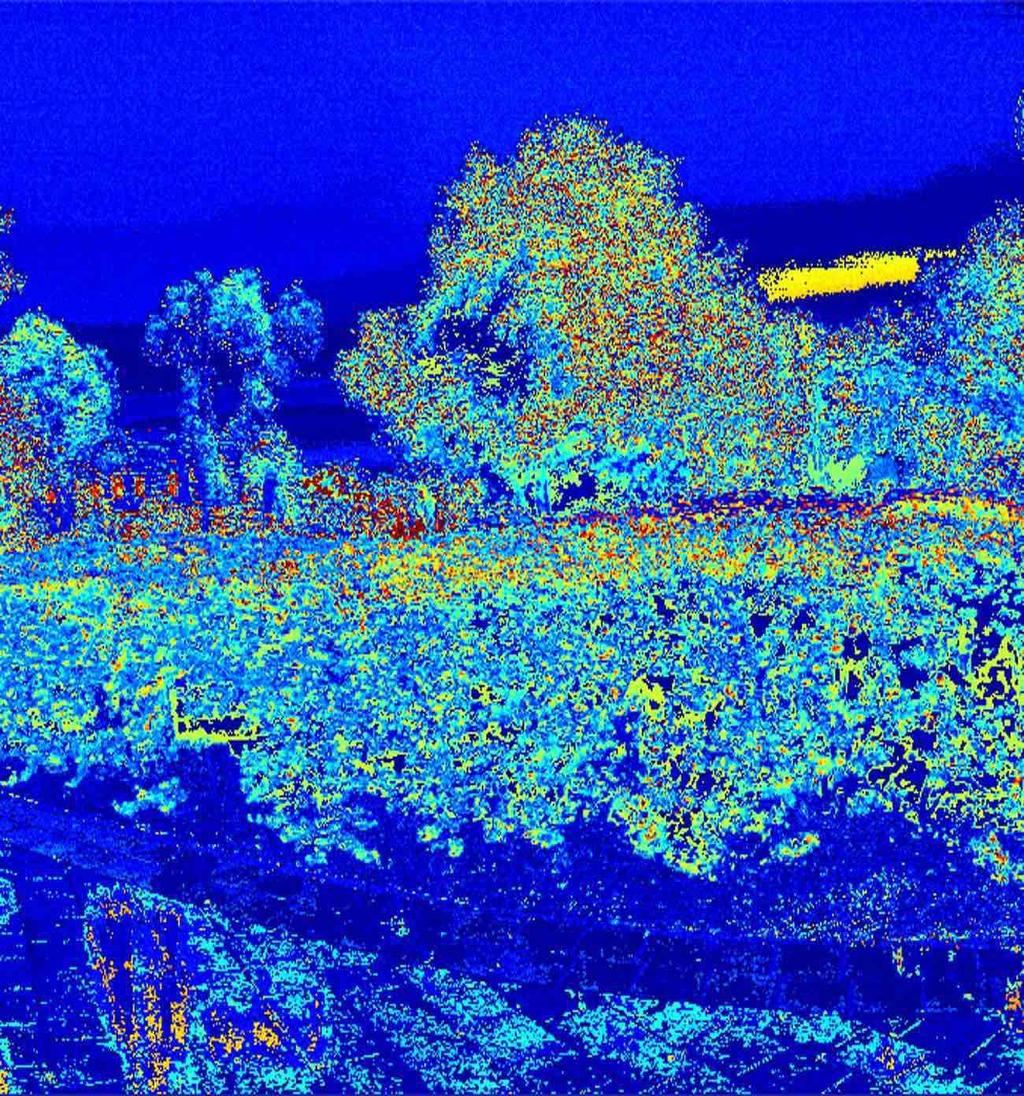

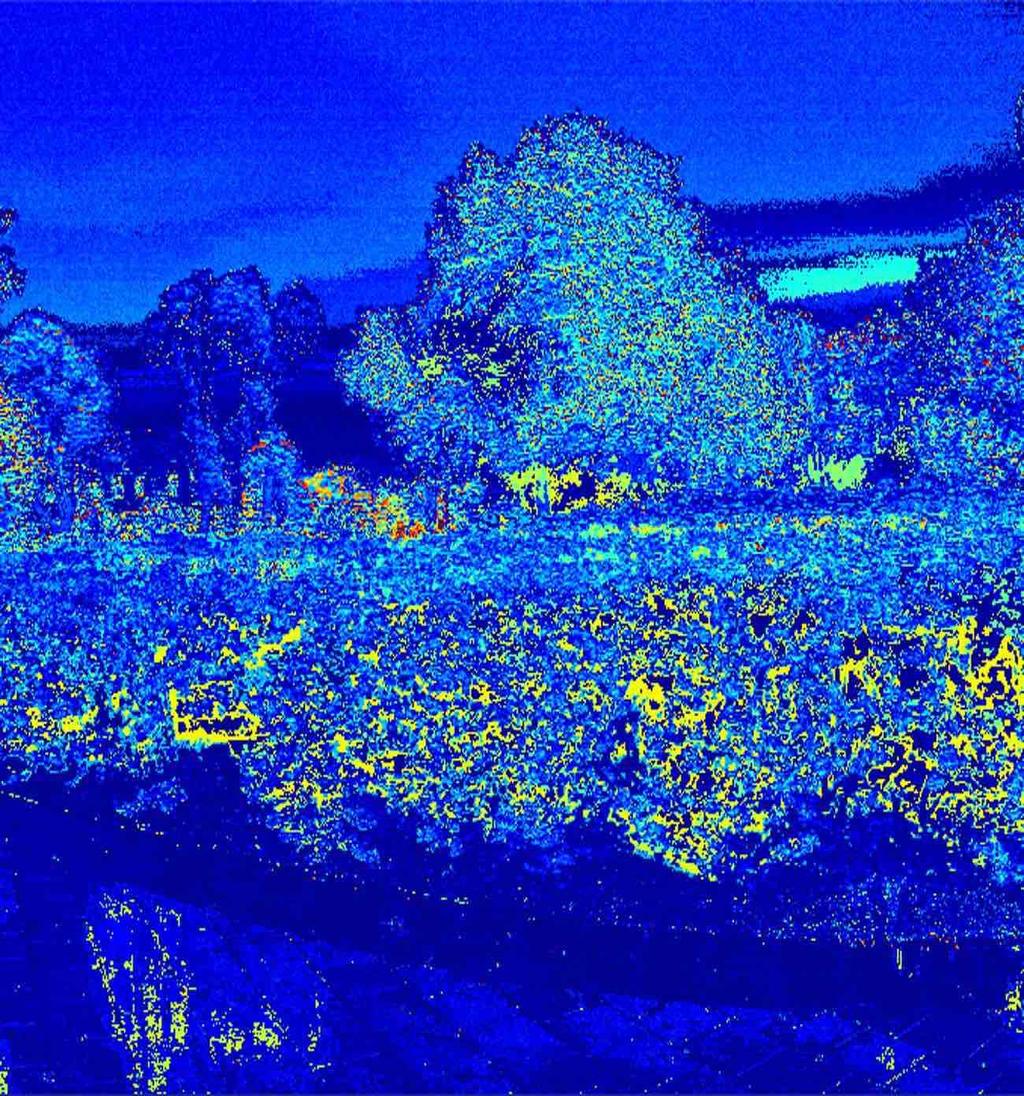

7 ECCV16[3] ECCV14[23] Our method Reconstruction Our method Ground truth ECCV16[3] ECCV14[23] Our method Reconstruction Our method Ground truth 420nm 460nm 500nm 540nm nm 620nm Figure 4: Sample results from the hyperspectral database [3]. 660nm


 RGB image (b) Camera response Patch #1 Patch #2 Patch #3 Patch #4 (c) Comparison between")
![our method, [23] and [3] Figure 6: Experiment results of real-world scenario using a](/docs-images/91/107374428/images/8-3.jpg "commercial Nikon D4S camera. (a) The RGB image of the scene with a color checker board.")
 Recovered spectra from our method, [23] and [3] for the four color patches indicated in")






8 Best Performance 2.02% 19.06% 3.81% 2.52% 11.79% 6.22% 2.54% 18.78% 3.70% 2.69% 13.08% 5.29% 2.78% 17.84% 6.30% 8.74% 19.73% 9.16% 7.30% 13.42% 8.22% 7.25% 44.06% 14.08% 6.28% 21.18% 9.51% 6.16% 12.61% 6.97% Worst Performance Our [23] [3] Our [23] [3] Figure 5: The scenarios where our method works best and worst. The comparison of corresponding average is also provided. (a) RGB image (b) Camera response Patch #1 Patch #2 Patch #3 Patch #4 (c) Comparison between our method, [23] and [3] Figure 6: Experiment results of real-world scenario using a commercial Nikon D4S camera. (a) The RGB image of the scene with a color checker board. (b) The camera spectral response function provided by the maker. (c) Recovered spectra from our method, [23] and [3] for the four color patches indicated in (a). 5. Conclusion We have explored the intrinsic dimensionality of the spectral space of natural scenes and found that a low dimensional embedding by Isomap is enough, to a large extent, to account for the spectral variance. This has allowed us to train a neural network based nonlinear mapping between the RGB color space and the three-dimensional embedding, by using only a small amount of representative data in an efficient manner. Experiments using synthetic images and real world data have verified the effectiveness of our nonlinear mapping based method for spectral super-resolution, as well as its advantages over existing approaches. In this paper, we have concentrated primarily on the spectra of natural scenes, which is relevant to consumer RGB device based spectral imaging of outdoor objects under daylight illumination. The illumination spectra for indoor illuminants are more complex. An extensive evaluation of our spectral recovery method for indoor scenes deserves to be conducted in our future work. Acknowledgement The majority of this paper was finished when Yan Jia was visiting National Institute of Informatics (NII), Japan, funded by the NII MOU Internship Program. This work was supported in part by JSPS KAKENHI Grant Number JP15H05918 and JP16K
9 References [1] N. Akhtar, F. Shafait, and A. Mian. Hierarchical beta process with gaussian process prior for hyperspectral image super resolution. In Proc. of European Conference on Computer Vision (ECCV), pages , Oct [2] R. K. Antonio. Single image spectral reconstruction for multimedia applications. In the 23rd ACM International Conference on Multimedia, pages , , 3 [3] B. Arad and O. Ben-Shahar. Sparse recovery of hyperspectral signal from natural rgb images. In Proc. of European Conference on Computer Vision (ECCV), pages , Oct , 3, 4, 5, 6, 7, 8 [4] F. Ayala, J. F. Echávarri, P. Renet, and A. I. Negueruela. Use of three tristimulus values from surface reflectance spectra to calculate the principal components to reconstruct these spectra by using only three eigenvector. Journal of the Optical Society of America A, 23(8): , Sep , 3 [5] X. Cao, H. Du, X. Tong, Q. Dai, and S. Lin. A Prism- Mask System for Multispectral Video Acquisition. IEEE Trans. Pattern Analysis and Machine Intelligence (PAMI), 33(12): , [6] X. Cao, X. Tong, Q. Dai, and S. Lin. High resolution multispectral video capture with a hybrid camera system. In Proc. of IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages , [7] A. Chakrabarti and T. Zickler. Statistics of real-world hyperspectral images. In Proc. of IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages , June , 5 [8] C. Chi, H. Yoo, and M. Ben-Ezra. Multi-Spectral Imaging by Optimized Wide Band Illumination. International Journal of Computer Vision (IJCV), 86(2-3): , [9] J. Cohen. Dependency of the spectral curves of the munsell color chips. Psychonomic science, 1(1-12): , Jan , 3 [10] M. Descour and E. Dereniak. Computed tomography imaging spectrometer: Experimental calibration and reconstruction results. Applied Optics, 34(22): , [11] M. Donald. An algorithm for least-squares estimation of nonlinear parameters. SIAM Journal on Applied Mathematics, 11(2): , [12] Y. Fu, Y. Zheng, I. Sato, and Y. Sato. Exploiting spectralspatial correlation for coded hyperspectral image restoration. In Proc. of IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages , [13] L. Gao, R. Kester, N. Hagen, and T. Tomasz. Snapshot image mapping spectrometer (IMS) with high sampling density for hyperspectral microscopy. Optical Express, 18(14): , [14] N. Gat. Imaging spectroscopy using tunable filters: a review. In Proc. of SPIE, Wavelet Applications VII, volume 4056, pages 50 64, [15] S. Han, I. Sato, T. Okabe, and Y. Sato. Fast Spectral Reflectance Recovery Using DLP Projector. International Journal of Computer Vision (IJCV), pages 1 13, Dec [16] T. Jaaskelainen, J. Parkkinen, and S. Toyooka. Vectorsubspace model for color representation. Journal of the Optical Society of America A, 7(4): , , 3 [17] R. Kawakami, J. Wright, Y.-W. Tai, Y. Matsushita, M. Ben- Ezra, and K. Ikeuchi. High-resolution hyperspectral imaging via matrix factorization. In Proc. of IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages , [18] L. Kenneth. A method for the solution of certain non-linear problems in least squares. Quarterly of Applied Mathematics, 2: , [19] A. Lam, A. Subpa-Asa, I. Sato, T. Okabe, and Y. Sato. Spectral imaging using basis lights. In Proceedings of the British Machine Vision Conference. BMVA Press, [20] J. MacQueen. Some methods for classification and analysis of multivariate observations. In Proceedings of the fifth Berkeley symposium on mathematical statistics and probability., volume 1, pages , California, USA, [21] L. T. Maloney. Evaluation of linear models of surface spectral reflectance with small numbers of parameters. Journal of the Optical Society of America A, 3(10): , Nov , 3 [22] D. H. Marimont and B. A. Wandell. Linear models of surface and illuminant spectra. Journal of the Optical Society of America A, 9(11): , , 3 [23] R. M. H. Nguyen, D. K. Prasad, and M. S. Brown. Training- Based Spectral Reconstruction from a Single RGB Image. In Proc. of European Conference on Computer Vision (ECCV), pages , Sept , 3, 5, 6, 7, 8 [24] J.-I. Park, M.-H. Lee, M. D. Grossberg, and S. K. Nayar. Multispectral Imaging Using Multiplexed Illumination. In Proc. of International Conference on Computer Vision (ICCV), pages 1 8, [25] J. P. S. Parkkinen, J. Hallikainen, and T. Jaaskelainen. Characteristic spectra of munsell colors. Journal of the Optical Society of America A, 6(2): , , 3 [26] J. B. Tenenbaum, V. de Silva, and J. C. Langford. A global geometric framework for nonlinear dimensionality reduction. Science, 290: , , 4 [27] A. Wagadarikar, N. Pitsianis, X. Sun, and B. David. Video rate spectral imaging using a coded aperture snapshot spectral imager. Optical Express, 17(8): , [28] F. Yasuma, T. Mitsunaga, D. Iso, and S. Nayar. Generalized assorted pixel camera: Post-capture control of resolution, dynamic range and spectrum. Technical report, Nov , 5 [29] Z. Zhao and G. Feng. A dictionary-based algorithm for dimensionality reduction and data reconstruction. In 22nd International Conference on Pattern Recognition (ICPR), pages IEEE, Dec
Fast Spectral Reflectance Recovery using DLP Projector
 Fast Spectral Reflectance Recovery using DLP Projector Shuai Han 1, Imari Sato 2, Takahiro Okabe 1, and Yoichi Sato 1 1 Institute of Industrial Science, The University of Tokyo, Japan 2 National Institute
Fast Spectral Reflectance Recovery using DLP Projector Shuai Han 1, Imari Sato 2, Takahiro Okabe 1, and Yoichi Sato 1 1 Institute of Industrial Science, The University of Tokyo, Japan 2 National Institute
Estimating basis functions for spectral sensitivity of digital cameras
 (MIRU2009) 2009 7 Estimating basis functions for spectral sensitivity of digital cameras Abstract Hongxun ZHAO, Rei KAWAKAMI, Robby T.TAN, and Katsushi IKEUCHI Institute of Industrial Science, The University
(MIRU2009) 2009 7 Estimating basis functions for spectral sensitivity of digital cameras Abstract Hongxun ZHAO, Rei KAWAKAMI, Robby T.TAN, and Katsushi IKEUCHI Institute of Industrial Science, The University
Spectral Imaging Using Basis Lights
 ANTONY LAM, ET AL.: SPECTRAL IMAGING USING BASIS LIGHTS 1 Spectral Imaging Using Basis Lights Antony Lam 1 antony@nii.ac.jp Art Subpa-Asa 2 art@set.or.th Imari Sato 1 imarik@nii.ac.jp Takahiro Okabe 3
ANTONY LAM, ET AL.: SPECTRAL IMAGING USING BASIS LIGHTS 1 Spectral Imaging Using Basis Lights Antony Lam 1 antony@nii.ac.jp Art Subpa-Asa 2 art@set.or.th Imari Sato 1 imarik@nii.ac.jp Takahiro Okabe 3
Abstract. 1 Introduction. Information and Communication Engineering July 2nd Fast Spectral Reflectance Recovery using DLP Projector
 Information and Communication Engineering July 2nd 2010 Fast Spectral Reflectance Recovery using DLP Projector Sato Laboratory D2, 48-097403, Shuai Han Abstract We present a practical approach to fast
Information and Communication Engineering July 2nd 2010 Fast Spectral Reflectance Recovery using DLP Projector Sato Laboratory D2, 48-097403, Shuai Han Abstract We present a practical approach to fast
Photometric Stereo with Auto-Radiometric Calibration
 Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
Spectral Compression: Weighted Principal Component Analysis versus Weighted Least Squares
 Spectral Compression: Weighted Principal Component Analysis versus Weighted Least Squares Farnaz Agahian a*, Brian Funt a, Seyed Hossein Amirshahi b a Simon Fraser University, 8888 University Dr. V5A 1S6,
Spectral Compression: Weighted Principal Component Analysis versus Weighted Least Squares Farnaz Agahian a*, Brian Funt a, Seyed Hossein Amirshahi b a Simon Fraser University, 8888 University Dr. V5A 1S6,
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference
 Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Geodesic Based Ink Separation for Spectral Printing
 Geodesic Based Ink Separation for Spectral Printing Behnam Bastani*, Brian Funt**, *Hewlett-Packard Company, San Diego, CA, USA **Simon Fraser University, Vancouver, BC, Canada Abstract An ink separation
Geodesic Based Ink Separation for Spectral Printing Behnam Bastani*, Brian Funt**, *Hewlett-Packard Company, San Diego, CA, USA **Simon Fraser University, Vancouver, BC, Canada Abstract An ink separation
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
A Novel Image Super-resolution Reconstruction Algorithm based on Modified Sparse Representation
 , pp.162-167 http://dx.doi.org/10.14257/astl.2016.138.33 A Novel Image Super-resolution Reconstruction Algorithm based on Modified Sparse Representation Liqiang Hu, Chaofeng He Shijiazhuang Tiedao University,
, pp.162-167 http://dx.doi.org/10.14257/astl.2016.138.33 A Novel Image Super-resolution Reconstruction Algorithm based on Modified Sparse Representation Liqiang Hu, Chaofeng He Shijiazhuang Tiedao University,
Estimating the wavelength composition of scene illumination from image data is an
 Chapter 3 The Principle and Improvement for AWB in DSC 3.1 Introduction Estimating the wavelength composition of scene illumination from image data is an important topics in color engineering. Solutions
Chapter 3 The Principle and Improvement for AWB in DSC 3.1 Introduction Estimating the wavelength composition of scene illumination from image data is an important topics in color engineering. Solutions
Selecting Models from Videos for Appearance-Based Face Recognition
 Selecting Models from Videos for Appearance-Based Face Recognition Abdenour Hadid and Matti Pietikäinen Machine Vision Group Infotech Oulu and Department of Electrical and Information Engineering P.O.
Selecting Models from Videos for Appearance-Based Face Recognition Abdenour Hadid and Matti Pietikäinen Machine Vision Group Infotech Oulu and Department of Electrical and Information Engineering P.O.
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Data Mining Chapter 3: Visualizing and Exploring Data Fall 2011 Ming Li Department of Computer Science and Technology Nanjing University
 Data Mining Chapter 3: Visualizing and Exploring Data Fall 2011 Ming Li Department of Computer Science and Technology Nanjing University Exploratory data analysis tasks Examine the data, in search of structures
Data Mining Chapter 3: Visualizing and Exploring Data Fall 2011 Ming Li Department of Computer Science and Technology Nanjing University Exploratory data analysis tasks Examine the data, in search of structures
High Information Rate and Efficient Color Barcode Decoding
 High Information Rate and Efficient Color Barcode Decoding Homayoun Bagherinia and Roberto Manduchi University of California, Santa Cruz, Santa Cruz, CA 95064, USA {hbagheri,manduchi}@soe.ucsc.edu http://www.ucsc.edu
High Information Rate and Efficient Color Barcode Decoding Homayoun Bagherinia and Roberto Manduchi University of California, Santa Cruz, Santa Cruz, CA 95064, USA {hbagheri,manduchi}@soe.ucsc.edu http://www.ucsc.edu
Removing Shadows from Images
 Removing Shadows from Images Zeinab Sadeghipour Kermani School of Computing Science Simon Fraser University Burnaby, BC, V5A 1S6 Mark S. Drew School of Computing Science Simon Fraser University Burnaby,
Removing Shadows from Images Zeinab Sadeghipour Kermani School of Computing Science Simon Fraser University Burnaby, BC, V5A 1S6 Mark S. Drew School of Computing Science Simon Fraser University Burnaby,
Non-linear dimension reduction
 Sta306b May 23, 2011 Dimension Reduction: 1 Non-linear dimension reduction ISOMAP: Tenenbaum, de Silva & Langford (2000) Local linear embedding: Roweis & Saul (2000) Local MDS: Chen (2006) all three methods
Sta306b May 23, 2011 Dimension Reduction: 1 Non-linear dimension reduction ISOMAP: Tenenbaum, de Silva & Langford (2000) Local linear embedding: Roweis & Saul (2000) Local MDS: Chen (2006) all three methods
Improved Spectral Density Measurement from Estimated Reflectance Data with Kernel Ridge Regression
 Improved Spectral Density Measurement from Estimated Reflectance Data with Kernel Ridge Regression Timo Eckhard 1, Maximilian Klammer 2,EvaM.Valero 1, and Javier Hernández-Andrés 1 1 Optics Department,
Improved Spectral Density Measurement from Estimated Reflectance Data with Kernel Ridge Regression Timo Eckhard 1, Maximilian Klammer 2,EvaM.Valero 1, and Javier Hernández-Andrés 1 1 Optics Department,
Learning a Manifold as an Atlas Supplementary Material
 Learning a Manifold as an Atlas Supplementary Material Nikolaos Pitelis Chris Russell School of EECS, Queen Mary, University of London [nikolaos.pitelis,chrisr,lourdes]@eecs.qmul.ac.uk Lourdes Agapito
Learning a Manifold as an Atlas Supplementary Material Nikolaos Pitelis Chris Russell School of EECS, Queen Mary, University of London [nikolaos.pitelis,chrisr,lourdes]@eecs.qmul.ac.uk Lourdes Agapito
Deep Residual Convolutional Neural Network for Hyperspectral Image Super-resolution
 Deep Residual Convolutional Neural Network for Hyperspectral Image Super-resolution Chen Wang 1, Yun Liu 2, Xiao Bai 1, Wenzhong Tang 1, Peng Lei 3, and Jun Zhou 4 1 School of Computer Science and Engineering,
Deep Residual Convolutional Neural Network for Hyperspectral Image Super-resolution Chen Wang 1, Yun Liu 2, Xiao Bai 1, Wenzhong Tang 1, Peng Lei 3, and Jun Zhou 4 1 School of Computer Science and Engineering,
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction
 Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Specular Reflection Separation using Dark Channel Prior
 2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST hyeongwoo.kim@kaist.ac.kr Hailin Jin Adobe Research hljin@adobe.com
2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST hyeongwoo.kim@kaist.ac.kr Hailin Jin Adobe Research hljin@adobe.com
Dimension Reduction CS534
 Dimension Reduction CS534 Why dimension reduction? High dimensionality large number of features E.g., documents represented by thousands of words, millions of bigrams Images represented by thousands of
Dimension Reduction CS534 Why dimension reduction? High dimensionality large number of features E.g., documents represented by thousands of words, millions of bigrams Images represented by thousands of
Robust Pose Estimation using the SwissRanger SR-3000 Camera
 Robust Pose Estimation using the SwissRanger SR- Camera Sigurjón Árni Guðmundsson, Rasmus Larsen and Bjarne K. Ersbøll Technical University of Denmark, Informatics and Mathematical Modelling. Building,
Robust Pose Estimation using the SwissRanger SR- Camera Sigurjón Árni Guðmundsson, Rasmus Larsen and Bjarne K. Ersbøll Technical University of Denmark, Informatics and Mathematical Modelling. Building,
SELECTION OF THE OPTIMAL PARAMETER VALUE FOR THE LOCALLY LINEAR EMBEDDING ALGORITHM. Olga Kouropteva, Oleg Okun and Matti Pietikäinen
 SELECTION OF THE OPTIMAL PARAMETER VALUE FOR THE LOCALLY LINEAR EMBEDDING ALGORITHM Olga Kouropteva, Oleg Okun and Matti Pietikäinen Machine Vision Group, Infotech Oulu and Department of Electrical and
SELECTION OF THE OPTIMAL PARAMETER VALUE FOR THE LOCALLY LINEAR EMBEDDING ALGORITHM Olga Kouropteva, Oleg Okun and Matti Pietikäinen Machine Vision Group, Infotech Oulu and Department of Electrical and
Learning based face hallucination techniques: A survey
 Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Spatially variant dimensionality reduction for the visualization of multi/hyperspectral images
 Author manuscript, published in "International Conference on Image Analysis and Recognition, Burnaby : Canada (2011)" DOI : 10.1007/978-3-642-21593-3_38 Spatially variant dimensionality reduction for the
Author manuscript, published in "International Conference on Image Analysis and Recognition, Burnaby : Canada (2011)" DOI : 10.1007/978-3-642-21593-3_38 Spatially variant dimensionality reduction for the
IMAGE DENOISING USING NL-MEANS VIA SMOOTH PATCH ORDERING
 IMAGE DENOISING USING NL-MEANS VIA SMOOTH PATCH ORDERING Idan Ram, Michael Elad and Israel Cohen Department of Electrical Engineering Department of Computer Science Technion - Israel Institute of Technology
IMAGE DENOISING USING NL-MEANS VIA SMOOTH PATCH ORDERING Idan Ram, Michael Elad and Israel Cohen Department of Electrical Engineering Department of Computer Science Technion - Israel Institute of Technology
Face Recognition via Sparse Representation
 Face Recognition via Sparse Representation John Wright, Allen Y. Yang, Arvind, S. Shankar Sastry and Yi Ma IEEE Trans. PAMI, March 2008 Research About Face Face Detection Face Alignment Face Recognition
Face Recognition via Sparse Representation John Wright, Allen Y. Yang, Arvind, S. Shankar Sastry and Yi Ma IEEE Trans. PAMI, March 2008 Research About Face Face Detection Face Alignment Face Recognition
Hyperspectral Remote Sensing
 Hyperspectral Remote Sensing Multi-spectral: Several comparatively wide spectral bands Hyperspectral: Many (could be hundreds) very narrow spectral bands GEOG 4110/5100 30 AVIRIS: Airborne Visible/Infrared
Hyperspectral Remote Sensing Multi-spectral: Several comparatively wide spectral bands Hyperspectral: Many (could be hundreds) very narrow spectral bands GEOG 4110/5100 30 AVIRIS: Airborne Visible/Infrared
Data fusion and multi-cue data matching using diffusion maps
 Data fusion and multi-cue data matching using diffusion maps Stéphane Lafon Collaborators: Raphy Coifman, Andreas Glaser, Yosi Keller, Steven Zucker (Yale University) Part of this work was supported by
Data fusion and multi-cue data matching using diffusion maps Stéphane Lafon Collaborators: Raphy Coifman, Andreas Glaser, Yosi Keller, Steven Zucker (Yale University) Part of this work was supported by
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Hybrid Textons: Modeling Surfaces with Reflectance and Geometry
 Hybrid Textons: Modeling Surfaces with Reflectance and Geometry Jing Wang and Kristin J. Dana Electrical and Computer Engineering Department Rutgers University Piscataway, NJ, USA {jingwang,kdana}@caip.rutgers.edu
Hybrid Textons: Modeling Surfaces with Reflectance and Geometry Jing Wang and Kristin J. Dana Electrical and Computer Engineering Department Rutgers University Piscataway, NJ, USA {jingwang,kdana}@caip.rutgers.edu
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Face Tracking. Synonyms. Definition. Main Body Text. Amit K. Roy-Chowdhury and Yilei Xu. Facial Motion Estimation
 Face Tracking Amit K. Roy-Chowdhury and Yilei Xu Department of Electrical Engineering, University of California, Riverside, CA 92521, USA {amitrc,yxu}@ee.ucr.edu Synonyms Facial Motion Estimation Definition
Face Tracking Amit K. Roy-Chowdhury and Yilei Xu Department of Electrical Engineering, University of California, Riverside, CA 92521, USA {amitrc,yxu}@ee.ucr.edu Synonyms Facial Motion Estimation Definition
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
ADVANCED IMAGE PROCESSING METHODS FOR ULTRASONIC NDE RESEARCH C. H. Chen, University of Massachusetts Dartmouth, N.
 ADVANCED IMAGE PROCESSING METHODS FOR ULTRASONIC NDE RESEARCH C. H. Chen, University of Massachusetts Dartmouth, N. Dartmouth, MA USA Abstract: The significant progress in ultrasonic NDE systems has now
ADVANCED IMAGE PROCESSING METHODS FOR ULTRASONIC NDE RESEARCH C. H. Chen, University of Massachusetts Dartmouth, N. Dartmouth, MA USA Abstract: The significant progress in ultrasonic NDE systems has now
HYPERSPECTRAL reflectance data are beneficial to
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE Separating Reflective and Fluorescent Components Using High Frequency Illumination in the Spectral Domain Ying Fu, Student Member, IEEE, Antony
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE Separating Reflective and Fluorescent Components Using High Frequency Illumination in the Spectral Domain Ying Fu, Student Member, IEEE, Antony
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling
 Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Computing the relations among three views based on artificial neural network
 Computing the relations among three views based on artificial neural network Ying Kin Yu Kin Hong Wong Siu Hang Or Department of Computer Science and Engineering The Chinese University of Hong Kong E-mail:
Computing the relations among three views based on artificial neural network Ying Kin Yu Kin Hong Wong Siu Hang Or Department of Computer Science and Engineering The Chinese University of Hong Kong E-mail:
Spectral Images and the Retinex Model
 Spectral Images and the Retine Model Anahit Pogosova 1, Tuija Jetsu 1, Ville Heikkinen 2, Markku Hauta-Kasari 1, Timo Jääskeläinen 2 and Jussi Parkkinen 1 1 Department of Computer Science and Statistics,
Spectral Images and the Retine Model Anahit Pogosova 1, Tuija Jetsu 1, Ville Heikkinen 2, Markku Hauta-Kasari 1, Timo Jääskeläinen 2 and Jussi Parkkinen 1 1 Department of Computer Science and Statistics,
COLOR FIDELITY OF CHROMATIC DISTRIBUTIONS BY TRIAD ILLUMINANT COMPARISON. Marcel P. Lucassen, Theo Gevers, Arjan Gijsenij
 COLOR FIDELITY OF CHROMATIC DISTRIBUTIONS BY TRIAD ILLUMINANT COMPARISON Marcel P. Lucassen, Theo Gevers, Arjan Gijsenij Intelligent Systems Lab Amsterdam, University of Amsterdam ABSTRACT Performance
COLOR FIDELITY OF CHROMATIC DISTRIBUTIONS BY TRIAD ILLUMINANT COMPARISON Marcel P. Lucassen, Theo Gevers, Arjan Gijsenij Intelligent Systems Lab Amsterdam, University of Amsterdam ABSTRACT Performance
Physics-based Vision: an Introduction
 Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Reconstruction of Surface Spectral Reflectances Using Characteristic Vectors of Munsell Colors
 Reconstruction of Surface Spectral Reflectances Using Characteristic Vectors of Munsell Colors Jae Kwon Eem and Hyun Duk Shin Dept. of Electronic Eng., Kum Oh ational Univ. of Tech., Kumi, Korea Seung
Reconstruction of Surface Spectral Reflectances Using Characteristic Vectors of Munsell Colors Jae Kwon Eem and Hyun Duk Shin Dept. of Electronic Eng., Kum Oh ational Univ. of Tech., Kumi, Korea Seung
Patch-Based Color Image Denoising using efficient Pixel-Wise Weighting Techniques
 Patch-Based Color Image Denoising using efficient Pixel-Wise Weighting Techniques Syed Gilani Pasha Assistant Professor, Dept. of ECE, School of Engineering, Central University of Karnataka, Gulbarga,
Patch-Based Color Image Denoising using efficient Pixel-Wise Weighting Techniques Syed Gilani Pasha Assistant Professor, Dept. of ECE, School of Engineering, Central University of Karnataka, Gulbarga,
SR-LLA: A NOVEL SPECTRAL RECONSTRUCTION METHOD BASED ON LOCALLY LINEAR APPROXIMATION
 SR-LLA: A NOVEL SPECTRAL RECONSTRUCTION METHOD BASED ON LOCALLY LINEAR APPROXIMATION Hongyu Li 1, Zhujing Wu 1, Lin Zhang 1*, and Jussi Parkkinen 2 1 School of Software Engineering, Tongji University,
SR-LLA: A NOVEL SPECTRAL RECONSTRUCTION METHOD BASED ON LOCALLY LINEAR APPROXIMATION Hongyu Li 1, Zhujing Wu 1, Lin Zhang 1*, and Jussi Parkkinen 2 1 School of Software Engineering, Tongji University,
Highlight detection with application to sweet pepper localization
 Ref: C0168 Highlight detection with application to sweet pepper localization Rotem Mairon and Ohad Ben-Shahar, the interdisciplinary Computational Vision Laboratory (icvl), Computer Science Dept., Ben-Gurion
Ref: C0168 Highlight detection with application to sweet pepper localization Rotem Mairon and Ohad Ben-Shahar, the interdisciplinary Computational Vision Laboratory (icvl), Computer Science Dept., Ben-Gurion
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
DIMENSION REDUCTION FOR HYPERSPECTRAL DATA USING RANDOMIZED PCA AND LAPLACIAN EIGENMAPS
 DIMENSION REDUCTION FOR HYPERSPECTRAL DATA USING RANDOMIZED PCA AND LAPLACIAN EIGENMAPS YIRAN LI APPLIED MATHEMATICS, STATISTICS AND SCIENTIFIC COMPUTING ADVISOR: DR. WOJTEK CZAJA, DR. JOHN BENEDETTO DEPARTMENT
DIMENSION REDUCTION FOR HYPERSPECTRAL DATA USING RANDOMIZED PCA AND LAPLACIAN EIGENMAPS YIRAN LI APPLIED MATHEMATICS, STATISTICS AND SCIENTIFIC COMPUTING ADVISOR: DR. WOJTEK CZAJA, DR. JOHN BENEDETTO DEPARTMENT
FLUORESCENCE analysis has received attention in recent
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE Reflectance and Fluorescence Spectral Recovery via Actively Lit RGB Images Ying Fu, Student Member, IEEE, Antony Lam, Member, IEEE, Imari
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE Reflectance and Fluorescence Spectral Recovery via Actively Lit RGB Images Ying Fu, Student Member, IEEE, Antony Lam, Member, IEEE, Imari
Supplementary materials of Multispectral imaging using a single bucket detector
 Supplementary materials of Multispectral imaging using a single bucket detector Liheng Bian 1, Jinli Suo 1,, Guohai Situ 2, Ziwei Li 1, Jingtao Fan 1, Feng Chen 1 and Qionghai Dai 1 1 Department of Automation,
Supplementary materials of Multispectral imaging using a single bucket detector Liheng Bian 1, Jinli Suo 1,, Guohai Situ 2, Ziwei Li 1, Jingtao Fan 1, Feng Chen 1 and Qionghai Dai 1 1 Department of Automation,
An Algorithm to Determine the Chromaticity Under Non-uniform Illuminant
 An Algorithm to Determine the Chromaticity Under Non-uniform Illuminant Sivalogeswaran Ratnasingam and Steve Collins Department of Engineering Science, University of Oxford, OX1 3PJ, Oxford, United Kingdom
An Algorithm to Determine the Chromaticity Under Non-uniform Illuminant Sivalogeswaran Ratnasingam and Steve Collins Department of Engineering Science, University of Oxford, OX1 3PJ, Oxford, United Kingdom
JPEG compression of monochrome 2D-barcode images using DCT coefficient distributions
 Edith Cowan University Research Online ECU Publications Pre. JPEG compression of monochrome D-barcode images using DCT coefficient distributions Keng Teong Tan Hong Kong Baptist University Douglas Chai
Edith Cowan University Research Online ECU Publications Pre. JPEG compression of monochrome D-barcode images using DCT coefficient distributions Keng Teong Tan Hong Kong Baptist University Douglas Chai
Compressive Sensing of High-Dimensional Visual Signals. Aswin C Sankaranarayanan Rice University
 Compressive Sensing of High-Dimensional Visual Signals Aswin C Sankaranarayanan Rice University Interaction of light with objects Reflection Fog Volumetric scattering Human skin Sub-surface scattering
Compressive Sensing of High-Dimensional Visual Signals Aswin C Sankaranarayanan Rice University Interaction of light with objects Reflection Fog Volumetric scattering Human skin Sub-surface scattering
DIFFUSE-SPECULAR SEPARATION OF MULTI-VIEW IMAGES UNDER VARYING ILLUMINATION. Department of Artificial Intelligence Kyushu Institute of Technology
 DIFFUSE-SPECULAR SEPARATION OF MULTI-VIEW IMAGES UNDER VARYING ILLUMINATION Kouki Takechi Takahiro Okabe Department of Artificial Intelligence Kyushu Institute of Technology ABSTRACT Separating diffuse
DIFFUSE-SPECULAR SEPARATION OF MULTI-VIEW IMAGES UNDER VARYING ILLUMINATION Kouki Takechi Takahiro Okabe Department of Artificial Intelligence Kyushu Institute of Technology ABSTRACT Separating diffuse
DIGITAL COLOR RESTORATION OF OLD PAINTINGS. Michalis Pappas and Ioannis Pitas
 DIGITAL COLOR RESTORATION OF OLD PAINTINGS Michalis Pappas and Ioannis Pitas Department of Informatics Aristotle University of Thessaloniki, Box 451, GR-54006 Thessaloniki, GREECE phone/fax: +30-31-996304
DIGITAL COLOR RESTORATION OF OLD PAINTINGS Michalis Pappas and Ioannis Pitas Department of Informatics Aristotle University of Thessaloniki, Box 451, GR-54006 Thessaloniki, GREECE phone/fax: +30-31-996304
Using Trichromatic and Multi-channel Imaging
 Reconstructing Spectral and Colorimetric Data Using Trichromatic and Multi-channel Imaging Daniel Nyström Dept. of Science and Technology (ITN), Linköping University SE-674, Norrköping, Sweden danny@itn.liu.se
Reconstructing Spectral and Colorimetric Data Using Trichromatic and Multi-channel Imaging Daniel Nyström Dept. of Science and Technology (ITN), Linköping University SE-674, Norrköping, Sweden danny@itn.liu.se
Dimension Reduction of Image Manifolds
 Dimension Reduction of Image Manifolds Arian Maleki Department of Electrical Engineering Stanford University Stanford, CA, 9435, USA E-mail: arianm@stanford.edu I. INTRODUCTION Dimension reduction of datasets
Dimension Reduction of Image Manifolds Arian Maleki Department of Electrical Engineering Stanford University Stanford, CA, 9435, USA E-mail: arianm@stanford.edu I. INTRODUCTION Dimension reduction of datasets
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
An Approach for Reduction of Rain Streaks from a Single Image
 An Approach for Reduction of Rain Streaks from a Single Image Vijayakumar Majjagi 1, Netravati U M 2 1 4 th Semester, M. Tech, Digital Electronics, Department of Electronics and Communication G M Institute
An Approach for Reduction of Rain Streaks from a Single Image Vijayakumar Majjagi 1, Netravati U M 2 1 4 th Semester, M. Tech, Digital Electronics, Department of Electronics and Communication G M Institute
Partial Calibration and Mirror Shape Recovery for Non-Central Catadioptric Systems
 Partial Calibration and Mirror Shape Recovery for Non-Central Catadioptric Systems Abstract In this paper we present a method for mirror shape recovery and partial calibration for non-central catadioptric
Partial Calibration and Mirror Shape Recovery for Non-Central Catadioptric Systems Abstract In this paper we present a method for mirror shape recovery and partial calibration for non-central catadioptric
Computational color Lecture 1. Ville Heikkinen
 Computational color Lecture 1 Ville Heikkinen 1. Introduction - Course context - Application examples (UEF research) 2 Course Standard lecture course: - 2 lectures per week (see schedule from Weboodi)
Computational color Lecture 1 Ville Heikkinen 1. Introduction - Course context - Application examples (UEF research) 2 Course Standard lecture course: - 2 lectures per week (see schedule from Weboodi)
Head Frontal-View Identification Using Extended LLE
 Head Frontal-View Identification Using Extended LLE Chao Wang Center for Spoken Language Understanding, Oregon Health and Science University Abstract Automatic head frontal-view identification is challenging
Head Frontal-View Identification Using Extended LLE Chao Wang Center for Spoken Language Understanding, Oregon Health and Science University Abstract Automatic head frontal-view identification is challenging
Saliency Detection for Videos Using 3D FFT Local Spectra
 Saliency Detection for Videos Using 3D FFT Local Spectra Zhiling Long and Ghassan AlRegib School of Electrical and Computer Engineering, Georgia Institute of Technology, Atlanta, GA 30332, USA ABSTRACT
Saliency Detection for Videos Using 3D FFT Local Spectra Zhiling Long and Ghassan AlRegib School of Electrical and Computer Engineering, Georgia Institute of Technology, Atlanta, GA 30332, USA ABSTRACT
Modeling 3D Human Poses from Uncalibrated Monocular Images
 Modeling 3D Human Poses from Uncalibrated Monocular Images Xiaolin K. Wei Texas A&M University xwei@cse.tamu.edu Jinxiang Chai Texas A&M University jchai@cse.tamu.edu Abstract This paper introduces an
Modeling 3D Human Poses from Uncalibrated Monocular Images Xiaolin K. Wei Texas A&M University xwei@cse.tamu.edu Jinxiang Chai Texas A&M University jchai@cse.tamu.edu Abstract This paper introduces an
Generalized Principal Component Analysis CVPR 2007
 Generalized Principal Component Analysis Tutorial @ CVPR 2007 Yi Ma ECE Department University of Illinois Urbana Champaign René Vidal Center for Imaging Science Institute for Computational Medicine Johns
Generalized Principal Component Analysis Tutorial @ CVPR 2007 Yi Ma ECE Department University of Illinois Urbana Champaign René Vidal Center for Imaging Science Institute for Computational Medicine Johns
A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction
 A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction Jaemin Lee and Ergun Akleman Visualization Sciences Program Texas A&M University Abstract In this paper we present a practical
A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction Jaemin Lee and Ergun Akleman Visualization Sciences Program Texas A&M University Abstract In this paper we present a practical
Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging
 Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging Florin C. Ghesu 1, Thomas Köhler 1,2, Sven Haase 1, Joachim Hornegger 1,2 04.09.2014 1 Pattern
Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging Florin C. Ghesu 1, Thomas Köhler 1,2, Sven Haase 1, Joachim Hornegger 1,2 04.09.2014 1 Pattern
Hyperspectral and Multispectral Image Fusion Using Local Spatial-Spectral Dictionary Pair
 Hyperspectral and Multispectral Image Fusion Using Local Spatial-Spectral Dictionary Pair Yifan Zhang, Tuo Zhao, and Mingyi He School of Electronics and Information International Center for Information
Hyperspectral and Multispectral Image Fusion Using Local Spatial-Spectral Dictionary Pair Yifan Zhang, Tuo Zhao, and Mingyi He School of Electronics and Information International Center for Information
Feature Point Extraction using 3D Separability Filter for Finger Shape Recognition
 Feature Point Extraction using 3D Separability Filter for Finger Shape Recognition Ryoma Yataka, Lincon Sales de Souza, and Kazuhiro Fukui Graduate School of Systems and Information Engineering, University
Feature Point Extraction using 3D Separability Filter for Finger Shape Recognition Ryoma Yataka, Lincon Sales de Souza, and Kazuhiro Fukui Graduate School of Systems and Information Engineering, University
Extensions of One-Dimensional Gray-level Nonlinear Image Processing Filters to Three-Dimensional Color Space
 Extensions of One-Dimensional Gray-level Nonlinear Image Processing Filters to Three-Dimensional Color Space Orlando HERNANDEZ and Richard KNOWLES Department Electrical and Computer Engineering, The College
Extensions of One-Dimensional Gray-level Nonlinear Image Processing Filters to Three-Dimensional Color Space Orlando HERNANDEZ and Richard KNOWLES Department Electrical and Computer Engineering, The College
Coded Illumination and Imaging for Fluorescence Based Classification
 Coded Illumination and Imaging for Fluorescence Based Classification Yuta Asano 1, Misaki Meguro 1, Chao Wang 2, Antony Lam 3, Yinqiang Zheng 4, Takahiro Okabe 2, and Imari Sato 1,4 1 Tokyo Institute of
Coded Illumination and Imaging for Fluorescence Based Classification Yuta Asano 1, Misaki Meguro 1, Chao Wang 2, Antony Lam 3, Yinqiang Zheng 4, Takahiro Okabe 2, and Imari Sato 1,4 1 Tokyo Institute of
Robust Face Recognition via Sparse Representation Authors: John Wright, Allen Y. Yang, Arvind Ganesh, S. Shankar Sastry, and Yi Ma
 Robust Face Recognition via Sparse Representation Authors: John Wright, Allen Y. Yang, Arvind Ganesh, S. Shankar Sastry, and Yi Ma Presented by Hu Han Jan. 30 2014 For CSE 902 by Prof. Anil K. Jain: Selected
Robust Face Recognition via Sparse Representation Authors: John Wright, Allen Y. Yang, Arvind Ganesh, S. Shankar Sastry, and Yi Ma Presented by Hu Han Jan. 30 2014 For CSE 902 by Prof. Anil K. Jain: Selected
Factorization with Missing and Noisy Data
 Factorization with Missing and Noisy Data Carme Julià, Angel Sappa, Felipe Lumbreras, Joan Serrat, and Antonio López Computer Vision Center and Computer Science Department, Universitat Autònoma de Barcelona,
Factorization with Missing and Noisy Data Carme Julià, Angel Sappa, Felipe Lumbreras, Joan Serrat, and Antonio López Computer Vision Center and Computer Science Department, Universitat Autònoma de Barcelona,
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
A MAXIMUM NOISE FRACTION TRANSFORM BASED ON A SENSOR NOISE MODEL FOR HYPERSPECTRAL DATA. Naoto Yokoya 1 and Akira Iwasaki 2
 A MAXIMUM NOISE FRACTION TRANSFORM BASED ON A SENSOR NOISE MODEL FOR HYPERSPECTRAL DATA Naoto Yokoya 1 and Akira Iwasaki 1 Graduate Student, Department of Aeronautics and Astronautics, The University of
A MAXIMUM NOISE FRACTION TRANSFORM BASED ON A SENSOR NOISE MODEL FOR HYPERSPECTRAL DATA Naoto Yokoya 1 and Akira Iwasaki 1 Graduate Student, Department of Aeronautics and Astronautics, The University of
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Classification of Hyperspectral Breast Images for Cancer Detection. Sander Parawira December 4, 2009
 1 Introduction Classification of Hyperspectral Breast Images for Cancer Detection Sander Parawira December 4, 2009 parawira@stanford.edu In 2009 approximately one out of eight women has breast cancer.
1 Introduction Classification of Hyperspectral Breast Images for Cancer Detection Sander Parawira December 4, 2009 parawira@stanford.edu In 2009 approximately one out of eight women has breast cancer.
Image Enhancement Techniques for Fingerprint Identification
 March 2013 1 Image Enhancement Techniques for Fingerprint Identification Pankaj Deshmukh, Siraj Pathan, Riyaz Pathan Abstract The aim of this paper is to propose a new method in fingerprint enhancement
March 2013 1 Image Enhancement Techniques for Fingerprint Identification Pankaj Deshmukh, Siraj Pathan, Riyaz Pathan Abstract The aim of this paper is to propose a new method in fingerprint enhancement
Bipartite Graph Partitioning and Content-based Image Clustering
 Bipartite Graph Partitioning and Content-based Image Clustering Guoping Qiu School of Computer Science The University of Nottingham qiu @ cs.nott.ac.uk Abstract This paper presents a method to model the
Bipartite Graph Partitioning and Content-based Image Clustering Guoping Qiu School of Computer Science The University of Nottingham qiu @ cs.nott.ac.uk Abstract This paper presents a method to model the
Characterizing and Controlling the. Spectral Output of an HDR Display
 Characterizing and Controlling the Spectral Output of an HDR Display Ana Radonjić, Christopher G. Broussard, and David H. Brainard Department of Psychology, University of Pennsylvania, Philadelphia, PA
Characterizing and Controlling the Spectral Output of an HDR Display Ana Radonjić, Christopher G. Broussard, and David H. Brainard Department of Psychology, University of Pennsylvania, Philadelphia, PA
EFFICIENT REPRESENTATION OF LIGHTING PATTERNS FOR IMAGE-BASED RELIGHTING
 EFFICIENT REPRESENTATION OF LIGHTING PATTERNS FOR IMAGE-BASED RELIGHTING Hyunjung Shim Tsuhan Chen {hjs,tsuhan}@andrew.cmu.edu Department of Electrical and Computer Engineering Carnegie Mellon University
EFFICIENT REPRESENTATION OF LIGHTING PATTERNS FOR IMAGE-BASED RELIGHTING Hyunjung Shim Tsuhan Chen {hjs,tsuhan}@andrew.cmu.edu Department of Electrical and Computer Engineering Carnegie Mellon University
Differential Structure in non-linear Image Embedding Functions
 Differential Structure in non-linear Image Embedding Functions Robert Pless Department of Computer Science, Washington University in St. Louis pless@cse.wustl.edu Abstract Many natural image sets are samples
Differential Structure in non-linear Image Embedding Functions Robert Pless Department of Computer Science, Washington University in St. Louis pless@cse.wustl.edu Abstract Many natural image sets are samples
Storage Efficient NL-Means Burst Denoising for Programmable Cameras
 Storage Efficient NL-Means Burst Denoising for Programmable Cameras Brendan Duncan Stanford University brendand@stanford.edu Miroslav Kukla Stanford University mkukla@stanford.edu Abstract An effective
Storage Efficient NL-Means Burst Denoising for Programmable Cameras Brendan Duncan Stanford University brendand@stanford.edu Miroslav Kukla Stanford University mkukla@stanford.edu Abstract An effective
Face Hallucination Based on Eigentransformation Learning
 Advanced Science and Technology etters, pp.32-37 http://dx.doi.org/10.14257/astl.2016. Face allucination Based on Eigentransformation earning Guohua Zou School of software, East China University of Technology,
Advanced Science and Technology etters, pp.32-37 http://dx.doi.org/10.14257/astl.2016. Face allucination Based on Eigentransformation earning Guohua Zou School of software, East China University of Technology,
Interreflection Removal Using Fluorescence
 Interreflection Removal Using Fluorescence Ying Fu 1, Antony Lam 2, Yasuyuki Matsushita 3, Imari Sato 4, and Yoichi Sato 1 1 The University of Tokyo, 2 Saitama University, 3 Microsoft Research Asia, 4
Interreflection Removal Using Fluorescence Ying Fu 1, Antony Lam 2, Yasuyuki Matsushita 3, Imari Sato 4, and Yoichi Sato 1 1 The University of Tokyo, 2 Saitama University, 3 Microsoft Research Asia, 4
Linear Discriminant Analysis for 3D Face Recognition System
 Linear Discriminant Analysis for 3D Face Recognition System 3.1 Introduction Face recognition and verification have been at the top of the research agenda of the computer vision community in recent times.
Linear Discriminant Analysis for 3D Face Recognition System 3.1 Introduction Face recognition and verification have been at the top of the research agenda of the computer vision community in recent times.
Projection Center Calibration for a Co-located Projector Camera System
 Projection Center Calibration for a Co-located Camera System Toshiyuki Amano Department of Computer and Communication Science Faculty of Systems Engineering, Wakayama University Sakaedani 930, Wakayama,
Projection Center Calibration for a Co-located Camera System Toshiyuki Amano Department of Computer and Communication Science Faculty of Systems Engineering, Wakayama University Sakaedani 930, Wakayama,
Deep Learning-driven Depth from Defocus via Active Multispectral Quasi-random Projections with Complex Subpatterns
 Deep Learning-driven Depth from Defocus via Active Multispectral Quasi-random Projections with Complex Subpatterns Avery Ma avery.ma@uwaterloo.ca Alexander Wong a28wong@uwaterloo.ca David A Clausi dclausi@uwaterloo.ca
Deep Learning-driven Depth from Defocus via Active Multispectral Quasi-random Projections with Complex Subpatterns Avery Ma avery.ma@uwaterloo.ca Alexander Wong a28wong@uwaterloo.ca David A Clausi dclausi@uwaterloo.ca
Linear Approximation of Sensitivity Curve Calibration
 Linear Approximation of Sensitivity Curve Calibration Dietrich Paulus 1 Joachim Hornegger 2 László Csink 3 Universität Koblenz-Landau Computational Visualistics Universitätsstr. 1 567 Koblenz paulus@uni-koblenz.de
Linear Approximation of Sensitivity Curve Calibration Dietrich Paulus 1 Joachim Hornegger 2 László Csink 3 Universität Koblenz-Landau Computational Visualistics Universitätsstr. 1 567 Koblenz paulus@uni-koblenz.de
High Dynamic Range Imaging.
 High Dynamic Range Imaging High Dynamic Range [3] In photography, dynamic range (DR) is measured in exposure value (EV) differences or stops, between the brightest and darkest parts of the image that show
High Dynamic Range Imaging High Dynamic Range [3] In photography, dynamic range (DR) is measured in exposure value (EV) differences or stops, between the brightest and darkest parts of the image that show
Detecting motion by means of 2D and 3D information
 Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
Manifold Learning for Video-to-Video Face Recognition
 Manifold Learning for Video-to-Video Face Recognition Abstract. We look in this work at the problem of video-based face recognition in which both training and test sets are video sequences, and propose
Manifold Learning for Video-to-Video Face Recognition Abstract. We look in this work at the problem of video-based face recognition in which both training and test sets are video sequences, and propose
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 3. HIGH DYNAMIC RANGE Computer Vision 2 Dr. Benjamin Guthier Pixel Value Content of this
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 3. HIGH DYNAMIC RANGE Computer Vision 2 Dr. Benjamin Guthier Pixel Value Content of this
Technical Report. Title: Manifold learning and Random Projections for multi-view object recognition
 Technical Report Title: Manifold learning and Random Projections for multi-view object recognition Authors: Grigorios Tsagkatakis 1 and Andreas Savakis 2 1 Center for Imaging Science, Rochester Institute
Technical Report Title: Manifold learning and Random Projections for multi-view object recognition Authors: Grigorios Tsagkatakis 1 and Andreas Savakis 2 1 Center for Imaging Science, Rochester Institute
HOW USEFUL ARE COLOUR INVARIANTS FOR IMAGE RETRIEVAL?
 HOW USEFUL ARE COLOUR INVARIANTS FOR IMAGE RETRIEVAL? Gerald Schaefer School of Computing and Technology Nottingham Trent University Nottingham, U.K. Gerald.Schaefer@ntu.ac.uk Abstract Keywords: The images
HOW USEFUL ARE COLOUR INVARIANTS FOR IMAGE RETRIEVAL? Gerald Schaefer School of Computing and Technology Nottingham Trent University Nottingham, U.K. Gerald.Schaefer@ntu.ac.uk Abstract Keywords: The images
Image Segmentation Techniques for Object-Based Coding
 Image Techniques for Object-Based Coding Junaid Ahmed, Joseph Bosworth, and Scott T. Acton The Oklahoma Imaging Laboratory School of Electrical and Computer Engineering Oklahoma State University {ajunaid,bosworj,sacton}@okstate.edu
Image Techniques for Object-Based Coding Junaid Ahmed, Joseph Bosworth, and Scott T. Acton The Oklahoma Imaging Laboratory School of Electrical and Computer Engineering Oklahoma State University {ajunaid,bosworj,sacton}@okstate.edu
Biometric Security System Using Palm print
 ISSN (Online) : 2319-8753 ISSN (Print) : 2347-6710 International Journal of Innovative Research in Science, Engineering and Technology Volume 3, Special Issue 3, March 2014 2014 International Conference
ISSN (Online) : 2319-8753 ISSN (Print) : 2347-6710 International Journal of Innovative Research in Science, Engineering and Technology Volume 3, Special Issue 3, March 2014 2014 International Conference
Image Coding with Active Appearance Models
 Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Image Classification Using Wavelet Coefficients in Low-pass Bands
 Proceedings of International Joint Conference on Neural Networks, Orlando, Florida, USA, August -7, 007 Image Classification Using Wavelet Coefficients in Low-pass Bands Weibao Zou, Member, IEEE, and Yan
Proceedings of International Joint Conference on Neural Networks, Orlando, Florida, USA, August -7, 007 Image Classification Using Wavelet Coefficients in Low-pass Bands Weibao Zou, Member, IEEE, and Yan