arxiv: v1 [cs.cv] 25 Feb 2019
|
|
|
- Basil Strickland
- 5 years ago
- Views:
Transcription

1 DD: Learning Optical with Unlabeled Data Distillation Pengpeng Liu, Irwin King, Michael R. Lyu, Jia Xu The Chinese University of Hong Kong, Shatin, N.T., Hong Kong Tencent AI Lab, Shenzhen, China {ppliu, king, arxiv: v1 [cs.cv] 25 Feb 2019 Abstract We present DD, a data distillation approach to learning optical flow estimation from unlabeled data. The approach distills reliable predictions from a teacher network, and uses these predictions as annotations to guide a student network to learn optical flow. Unlike existing work relying on handcrafted energy terms to handle occlusion, our approach is data-driven, and learns optical flow for occluded pixels. This enables us to train our model with a much simpler loss function, and achieve a much higher accuracy. We conduct a rigorous evaluation on the challenging Flying Chairs, MPI Sintel, KITT012 and 2015 benchmarks, and show that our approach significantly outperforms all existing unsupervised learning methods, while running at real time. Introduction Optical flow estimation is a core computer vision building block, with a wide range of applications, including autonomous driving (Menze and Geiger 2015), object tracking (Chauhan and Krishan 2013), action recognition (Simonyan and Zisserman 2014) and video processing (Bonneel et al. 2015). Traditional approaches (Horn and Schunck 1981; Brox et al. 2004; Brox and Malik 2011) formulate optical flow estimation as an energy minimization problem, but they are often computationally expensive (Xu, Ranftl, and Koltun 2017). Recent learning-based methods (Dosovitskiy et al. 2015; Ranjan and Black 2017; Ilg et al. 2017; Hui, Tang, and Loy 2018; Sun et al. 2018) overcome this issue by directly estimating optical flow from raw images using convolutional neural networks (CNNs). However, in order to train such CNNs with high performance, it requires a large collection of densely labeled data, which is extremely difficult to obtain for real-world sequences. One alternative is to use synthetic datasets. Unfortunately, there usually exists a large domain gap between the distribution of synthetic images and natural scenes (Liu et al. 2008). Previous networks (Dosovitskiy et al. 2015; Ranjan and Black 2017) trained only on synthetic data turn to overfit, and often perform poorly when they are directly evaluated on real sequences. Another promising direction is to learn from unlabeled videos, which are readily available Work mainly done during an internship at Tencent AI Lab. Copyright c 2019, Association for the Advancement of Artificial Intelligence ( All rights reserved. (x 1, y 1 ) (x1, y 1 ) (x 2, y 2 ) Teacher Student Guide Figure 1: Data distillation illustration. We use the optical flow predictions from our teacher model to guide the learning of our student model. at much larger scale. (Jason, Harley, and Derpanis 2016; Ren et al. 2017) employ the classical warping idea, and train CNNs with a photometric loss defined on the difference between reference and warped target images. Recent methods propose additional loss terms to cope with occluded pixels (Meister, Hur, and Roth 2018; Wang et al. 2018), or utilize multi-frames to reason occlusion (Janai et al. 2018). However, all these methods rely on hand-crafted energy terms to regularize optical flow estimation, lacking key capability to learn optical flow of occluded pixels. As a result, there is still a large performance gap comparing these methods with state-of-the-art fully supervised methods. Is it possible to learn optical flow in a data-driven way, while not using any ground truth at all? In this paper, we address this issue by a data distilling approach. Our algorithm optimizes two models, a teacher model and a student model (as shown in Figure 1). We train the teacher model to estimate optical flow for non-occluded pixels (e.g., (x 1, y 1 ) in ). Then, we hallucinate flow occlusion by cropping patches from original images (pixel (x 1, y 1 ) now becomes occluded in Ĩ1). Predictions from our teacher model are used as annotations to directly guide the student network to learn optical flow. Both networks share the identical architecture, and are trained end-to-end with simple loss functions. The student network is used to produce optical flow at test time, and runs at real time.
2 Image Warp & & Teacher Teacher Forward w f Backward w b Forwardbackward consistency check Forward O f Backward O b Cropped O f p Cropped O b p Warped Image w Warped Image w Photometric Loss Loss for Occluded Pixels & & Student Student Forward w f Backward w b Forwardbackward consistency check Forward O f Backward O b Valid Mask M f Valid Mask M b Warped Image w Warped Image w Photometric Loss Image Warp Figure 2: Framework overview of DD. Our teacher model and student model have identical network structures. We train the teacher model with a photometric loss L p for non-occluded pixels. The student model is trained with both L p and L o, a loss for occluded pixels. L o only functions on pixels that are non-occluded in original images but occluded in cropped patches (guided by Valid Mask M f, M b ). During testing, only the student model is used. The resulted self-training approach yields the highest accuracy among all unsupervised learning methods. At the time of writing, our method outperforms all published unsupervised flow methods on the Flying Chairs, MPI Sintel, KITT012 and 2015 benchmarks. More notably, our method achieves a Fl-noc error of 4.57% on KITT012, a Fl-all error of 14.29% on KITT015, even outperforming several recent fully supervised methods which are fine-tuned for each dataset (Dosovitskiy et al. 2015; Ranjan and Black 2017; Bailer, Varanasi, and Stricker 2017; Zweig and Wolf 2017; Xu, Ranftl, and Koltun 2017). Related Work Optical flow estimation has been a long-standing challenge in computer vision. Early variational approaches (Horn and Schunck 1981; Sun, Roth, and Black 2010) formulate it as an energy minimization problem based on brightness constancy and spatial smoothness. Such methods are effective for small motion, but tend to fail when displacements are large. Later, (Brox and Malik 2011; Weinzaepfel et al. 2013) integrate feature matching to tackle this issue. Specially, they find sparse feature correspondences to initialize flow estimation and further refine it in a pyramidal coarse-to-fine manner. The seminal work Epic (Revaud et al. 2015) interpolates dense flow from sparse matches and has become a widely used post-processing pipeline. Recently, (Bailer, Varanasi, and Stricker 2017; Xu, Ranftl, and Koltun 2017) use convolutional neural networks to learn a feature embedding for better matching and have demonstrated superior performance. However, all of these classical methods are often time-consuming, and their modules usually involve special tuning for different datasets. The success of deep neural networks has motivated the development of optical flow learning methods. The pioneer work is Net (Dosovitskiy et al. 2015), which takes two consecutive images as input and outputs a dense optical flow map. The following Net 2.0 (Ilg et al. 2017) significantly improves accuracy by stacking several basic Net modules together, and iteratively refining them. SpyNet (Ranjan and Black 2017) proposes to warp images at multiple scales to handle large displacements, and introduces a compact spatial pyramid network to predict optical flow. Very recently, PWC-Net (Sun et al. 2018) and Lite- Net (Hui, Tang, and Loy 2018) propose to warp features extracted from CNNs rather than warp images over different scales. They achieve state-of-the-art results while keeping a much smaller model size. Though promising performance has been achieved, these methods require a large amount of labeled training data, which is particularly difficult to obtain for optical flow. As a result, existing end-to-end deep learning based approaches (Dosovitskiy et al. 2015; Mayer et al. 2016; Janai et al. 2018) turn to utilize synthetic datasets for pretraining. Unfortunately, there usually exists a large domain gap between the distribution of synthetic datasets and natural scenes (Liu et al. 2008). Existing networks (Dosovitskiy et al. 2015; Ranjan and Black 2017) trained only on synthetic data turn to overfit, and often perform poorly when directly
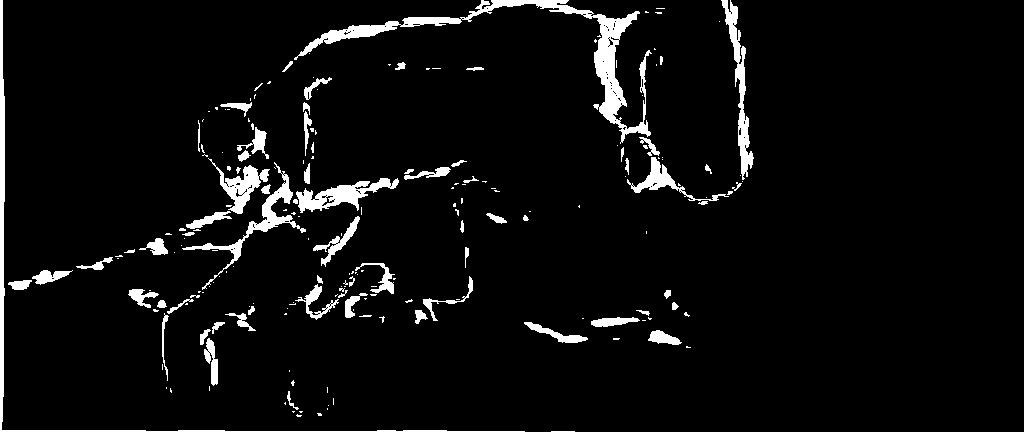
 is the first input image; (b,c) are forward and backward flow; (d,e) are forward and backward occlusion maps.")
 are forward and backward valid mask, where 1 means the pixel is occluded in (g) but non-occluded in (a), 0 otherwise. evaluated on real sequences.")
 construct loss functions based on brightness constancy and spatial smoothness.")

 introduce an unsupervised framework to estimate optical flow using a multi-frame formulation with temporal consistency.")



 with the same structure.")
3 (a) I1 (b) wf (c) wb (d) Of (e) Ob (f) Mf (g) Ie1 ef (h) w eb (i) w ef (j) O eb (k) O (l) Mb Figure 3: Example intermediate results from DD on KITTI. (a) is the first input image; (b,c) are forward and backward flow; (d,e) are forward and backward occlusion maps. (g) is the cropped patch of (a); (h,i,j,k) are the corresponding forward flow, backward flow, forward occlusion map and backward occlusion map respectively. (f,l) are forward and backward valid mask, where 1 means the pixel is occluded in (g) but non-occluded in (a), 0 otherwise. evaluated on real sequences. One promising direction is to develop unsupervised learning approaches. (Jason, Harley, and Derpanis 2016; Ren et al. 2017) construct loss functions based on brightness constancy and spatial smoothness. Specifically, the target image is warped according to the predicted flow, and then the difference between the reference image and the warped image is optimized using a photometric loss. Unfortunately, this loss would provide misleading information when the pixels are occluded. Very recently, (Meister, Hur, and Roth 2018; Wang et al. 2018) propose to first reason occlusion map and then exclude those occluded pixels when computing the photometric difference. Most recently, (Janai et al. 2018) introduce an unsupervised framework to estimate optical flow using a multi-frame formulation with temporal consistency. This method utilizes more data with more advanced occlusion reasoning, and hence achieves more accurate results. However, all these unsupervised learning methods rely on handcrafted energy terms to guide optical flow estimation, lacking key capability to learn optical flow of occluded pixels. As a consequence, the performance is still a large gap compared with state-of-the-art supervised methods. To bridge this gap, we propose to perform knowledge distillation from unlabeled data, inspired by (Hinton, Vinyals, and Dean 2015; Radosavovic et al. 2018) which performed knowledge distillation from multiple models or labeled data. In contrast to previous knowledge distillation methods, we do not use any human annotations. Our idea is to generate annotations on unlabeled data using a model trained with a classical optical flow energy, and then retrain the model using those extra generated annotations. This yields a simple yet effective method to learn optical flow for occluded pixels in a totally unsupervised manner. Method We first illustrate our learning framework in Figure 2. We simultaneously train two CNNs (a teacher model and a student model) with the same structure. The teacher model is employed to predict optical flow for non-occluded pixels and the student model is used to predict optical flow of both nonoccluded and occluded pixels. During testing time, only the student model is used to produce optical flow. Before describing our method, we define our notations as follows. Notation For our teacher model, we denote I1, I2 RH W 3 for two consecutive RGB images, where H and W are height and width respectively. Our goal is to estimate a forward optical flow wf RH W 2 from I1 to I2. After obtaining wf, we can warp I2 towards I1 to get a warped image I2w. Here, we also estimate a backward optical flow wb from I2 to I1 and a backward warp image I1w. Since there are many cases where one pixel is only visible in one image but not visible in the other image, namely occlusion, we denote Of, Ob RH W 1 as the forward and backward occlusion map respectively. For Of and Ob, value 1 means that the pixel in that location is occluded, while value 0 means not occluded. Our student model follows similar notations. We distill consistent predictions (wf and Of ) from our teacher model, and crop patches on the original images to hallucinate occlusion. Let Ie1, Ie2, wpf, wpb, Ofp and Obp denote the cropped image patches of I1, I2, wf, wb, Of and Ob respectively. The cropping size is h w, where h < H, w < W. The student network takes Ie1, Ie2 as input, and produces a forward and backward flow, a warped image, a occlusion ef, O eb respectively. ef, w e b, Ie2w, Ie1w, O map w p ef, we compute another mask After obtaining Of and O Mf, where value 1 means the pixel is occluded in image patch Ie1 but non-occluded in the original image I1. The backward mask Mb is computed in the same way. Figure 3 shows a real example for each notation used in DD. Network Architecture In principle, DD can use any backbone network to learn optical flow. We select PWC-Net (Sun et al. 2018) as our backbone network due to its remarkable performance and compact model size. PWC-Net learns 7-level feature representations for two input images, and gradually conducts feature warping and cost volume construction from the last level to the third level. As a result, the output resolution of flow map is a quarter of the original image size. We upsample the output flow to the full resolution using bilinear interpolation. To train two networks simultaneously in a totally unsupervised way, we normalize features when constructing cost volume, and swap the image pairs in our input to produce both forward and backward flow.









 in is the corresponding pixel of (x 1, y 1")














4 (a) Input Image 1 (b) GT (c) Our (d) GT (e) Our Figure 4: Sample results on Sintel datasets. The first three rows are from Sintel Clean, while the last three are from Sintel Final. Our method estimates accurate optical flow and reliable occlusion maps. We use the identical network architecture for our teacher and student model. The only difference between them is to train each with different input data and loss functions. Next, we discuss how to generate such data, and construct loss functions for each model in detail. Unlabeled Data Distillation For prior unsupervised optical flow learning methods, the only guidance is a photometric loss which measures the difference between the reference image and the warped target image. However, photometric loss makes no sense for occluded pixels. To tackle this issue, We distill predictions from our teacher model, and use them to generate input/output data for our student model. Figure 1 shows a toy example for our data distillation idea. Suppose pixel (x 2, y 2 ) in is the corresponding pixel of (x 1, y 1 ) in. Given (x 1, y 1 ) is non-occluded, we can use the classical photometric loss to find its optical flow using our teacher model. Now, if we crop image patches Ĩ1 and Ĩ 2, pixel (x 1, y 1 ) in Ĩ1 becomes occluded, since there is no corresponding pixel in Ĩ2 any more. Fortunately, the optical flow prediction for (x 1, y 1 ) from our teacher model is still there. We then directly use this prediction as annotation to guide the student model to learn optical flow for the occluded pixel (x 1, y 1 ) in Ĩ1. This is the key intuition behind DD. Figure 2 shows the main data flow for our approach. To make full use of the input data, we compute both forward and backward flow w f, w b for the original frames, as well as their warped images I w 1, I w 2. We also estimate two occlusion maps O f, O w by checking forward-backward consistency. The teacher model is trained with a photometric loss, which minimizes a warping error using,, O f, O w, I w 1, I w 2. This model produces accurate optical flow predictions for non-occluded pixels in and. For our student model, we randomly crop image patches Ĩ 1, Ĩ2 from,, and we compute forward and backward flow w f, w b for them. A similar photometric loss is employed for the non-occluded pixels in Ĩ1 and Ĩ2. In addition, predictions from our teacher model are employed as output annotations to guide those pixels occluded in cropped image patches but non-occluded in original images. Next, we discuss how to construct all the loss functions. Loss Functions Our loss functions include two components: photometric loss L p and loss for occluded pixels L o. Optionally, smoothness losses can also be added. Here, we focus on the above two loss terms for simplicity. For the teacher model, only L p is used to estimate the flow of non-occluded pixels, while for student model, L p and L o are both employed to estimate the optical flow of non-occluded and occluded pixels. Estimation. Our occlusion detection is based on the forward-backward consistency prior (Sundaram, Brox, and Keutzer 2010; Meister, Hur, and Roth 2018). That is, for non-occluded pixels, the forward flow should be the inverse of the backward flow at the corresponding pixel in the second image. We consider pixels as occluded when the mismatch between forward flow and backward flow is too large or the flow is out of image boundary Ω. Take a forward
5 Supervise Unsupervise Method Chairs Sintel Clean Sintel Final KITT012 KITT015 test train test train test train test Fl-noc train Fl-all NetS (Dosovitskiy et al. 2015) NetS+ft (Dosovitskiy et al. 2015) (3.66) 6.96 (4.44) SpyNet (Ranjan and Black 2017) SpyNet+ft (Ranjan and Black 2017) (3.17) 6.64 (4.32) % 35.07% Net2 (Ilg et al. 2017) Net2+ft (Ilg et al. 2017) (1.45) 4.16 (2.01) 5.74 (1.28) % (2.3) 11.48% PWC-Net (Sun et al. 2018) PWC-Net+ft (Sun et al. 2018) (1.70) 3.86 (2.21) 5.13 (1.45) % (2.16) 9.60% BackToBasic+ft (Jason, Harley, and Derpanis 2016) DST+ft (Ren et al. 2017) 5.11 (6.16) (6.81) % Un-CSS+ft (Meister, Hur, and Roth 2018) (7.91) % OccAware (Wang et al. 2018) OccAware+ft-Sintel (Wang et al. 2018) 3.76 (4.03) 7.95 (5.95) OccAware-KITTI (Wang et al. 2018) % MultiFrameOcc-Hard+ft (Janai et al. 2018) (6.05) (7.09) 6.65 MultiFrameOcc-Soft+ft (Janai et al. 2018) (3.89) 7.23 (5.52) % DD DD+ft-Sintel 3.46 (2.92) 6.18 (3.98) DD+ft-KITTI % % Table 1: Comparison to state-of-the-art optical flow estimation methods. All numbers are EPE except for the last column of KITT012 and KITT015 test sets, where we report percentage of erroneous pixels (Fl). Missing entries (-) indicate that the results are not reported for the respective method. Parentheses mean that the training is performed on the same dataset. Bold fonts highlight the best results among supervised and unsupervised methods respectively. Note that MultiFrameOcc (Janai et al. 2018) utilizes multiple frames, while all other methods use only two consecutive frames. occlusion map as an example, we first compute the reversed forward flow ŵ f = w b (p + w f (p)), where p Ω. A pixel is considered occluded if either of the following constraints is violated: { wf + ŵ f 2 < α 1 ( w f 2 + ŵ f 2 ) + α 2, (1) p + w f (p) / Ω, where we set α 1 = 0.01, α 2 = 0.05 for all our experiments. Backward occlusion maps are computed in the same way. Photometric Loss. The photometric loss is based on the brightness constancy assumption, which measures the difference between the reference image and the warped target image. It is only effective for non-occluded pixels. We define a simple loss as follows: L p = ψ( I w 2 ) (1 O f )/ (1 O f ) + ψ( I w 1 ) (1 O b )/ (1 O b ) (2) where ψ(x) = ( x + ɛ) q is a robust loss function, denotes the element-wise multiplication. During our experiments, we set ɛ = 0.01, q = 0.4. Our teacher model only minimizes this loss. Loss for Occluded Pixels. The key element in unsupervised learning is the loss for occluded pixels. In contrast to existing loss functions relying on smoothing prior to constrain flow estimation, our loss is purely data-driven. This enables us to directly learn from real data, and produce more accurate flow. To this end, we define our loss on pixels that are occluded in the cropped patch but non-occluded in the original image. Then, supervision is generated using predictions of the original image from our teacher model, which produces reliable optical flow for non-occluded pixels. To find these pixels, we first compute a valid mask M representing the pixels that are occluded in the cropped image but non-occluded in the original image: M f = clip(õf O p f, 0, 1) (3) Backward mask M b is computed in the same way. Then we define our loss for occluded pixels in the following, L o = ψ(w p f w f ) M f / M f + ψ(w p b w b) M b / M b (4) We use the same robust loss function ψ(x) with the same parameters defined in Eq. 2. Our student model minimizes the simple combination L p +L o. Experiments We evaluate DD on standard optical flow benchmarks including Flying Chairs (Dosovitskiy et al. 2015), MPI Sintel (Butler et al. 2012), KITT012(Geiger, Lenz, and Urtasun 2012), and KITT015 (Menze and Geiger 2015). We compare our results with state-of-the-art unsupervised methods including BackToBasic(Jason, Harley, and Derpanis 2016), DST(Ren et al. 2017), Un(Meister, Hur, and Roth 2018), OccAware(Wang et al. 2018) and MultiFrameOcc(Janai et al. 2018), as well as fully supervised learning methods including Net(Dosovitskiy et al. 2015), SpyNet(Ranjan and Black 2017), Net2(Ilg et al. 2017) and PWC-Net(Sun et al. 2018). Note that Multi- FrameOcc (Janai et al. 2018) utilizes multiple frames as input, while all other methods use only two consecutive frames. To ensure reproducibility and advance further innovations, we make our code and models publicly available our our project website.


, which is proved to be")











.")





6 (a) Input Image 1 (b) GT (c) Our (d) GT (e) Our Figure 5: Example results on KITTI datasets. The first three rows are from KITT012, and the last three are from KITT015. Our method estimates accurate optical flow and reliable occlusion maps. Note that on KITTI datasets, the occlusion masks are sparse and only contain pixels moving out of the image boundary. Implementation Details Data Preprocessing. We preprocess the image pairs using census transform (Zabih and Woodfill 1994), which is proved to be robust for optical flow estimation (Hafner, Demetz, and Weickert 2013). We find that this simple procedure can indeed improve the performance of unsupervised optical flow estimation, which is consistent with (Meister, Hur, and Roth 2018). Training procedure. For all our experiments, we use the same network architecture and train our model using Adam optimizer (Kingma and Ba 2014) with β1 =0.9 and β2 = For all datasets, we set batch size as 4. For all individual experiments, we use a initial learning rate of 1e-4, and it decays half every 50k iterations. For data augmentation, we only use random cropping, random flipping, and random channel swapping. Thanks to the simplicity of our loss functions, there is no need to tune hyper-parameters. Following prior work, we first pre-train DD on Flying Chairs. We initialize our teacher network from random, and warm it up with 200k iterations using our photometric loss without considering occlusion. Then, we add our occlusion detection check, and train the network with the photometric loss Lp for another 300k iterations. After that, we initialize the student model with the weights from our teacher model, and train both the teacher model (with Lp ) and the student model (with Lp + Lo ) together for 300k iterations. This concludes our pre-training, and the student model is used for future fine-tuning. We use the same fine-tuning procedure for all Sintel and KITTI datasets. First, we initialize the teacher network using the pre-trained student model from Flying Chairs, and train it for 300k iterations. Then, similar to pre-training on Flying Chairs, the student network is initialized with the new teacher model, and both networks are trained together for another 300k iterations. The student model is used during our evaluation. Evaluation Metrics. We consider two widely-used metrics to evaluate optical flow estimation and one metric of occlusion evaluation: average endpoint error (EPE), percentage of erroneous pixels (Fl), harmonic average of the precision and recall (F-measure). We also report the results of EPE over non-occluded pixels (NOC) and occluded pixels (OCC) respectively. EPE is the ranking metric on MPI Sintel benchmark, and Fl is the ranking metric on KITTI benchmarks. Comparison to State-of-the-art We compare our results with state-of-the art methods in Table 1. As we can see, our approach, DD, outperforms all existing unsupervised flow learning methods on all datasets. On the test set of Flying Chairs, our EPE is better than all prior results, decreasing from previous state-of-the-art 3.30 to More importantly, simply evaluating our model only pre-trained on Flying Chairs, DD achieves EPE=3.83 on Sintel Clean and EPE=4.85 on Sintel Final, which are even better than the results from state-of-the-art unsupervised methods (Wang et al. 2018; Janai et al. 2018) finetuned specifically for Sintel. This is remarkable, as it shows the great generalization capability of DD. After we finetuned DD using frames from the Sintel training set, we achieved an EPE=7.40 on the Sintel Final testing benchmark, improving the best prior result (EPE=8.81 from (Janai et al. 2018)) by a relative margin of 14.0 %. Similar improvement (from 7.23 to 6.18) is also observed on the Sintel Clean testing benchmark. Our model is even better than some supervised methods including (Dosovitskiy et al. 2015) and (Ranjan and Black 2017), which are finetuned on Sintel using ground truth annotations. Figure 4 shows sample DD results from Sintel, comparing our optical flow estimations and occlusion masks with the ground truth. On KITTI dataset, the improvement from DD is even
7 Census Data Chairs Sintel Clean Sintel Final KITT012 KITT015 Handling Transform Distillation ALL ALL NOC OCC ALL NOC OCC ALL NOC OCC ALL NOC OCC 4.06 (5.05) (2.45) (38.09) (7.54) (4.81) (42.46) (4.45) (2.16) (33.48) (6.56) (4.12) (37.83) (3.90) (1.60) (33.31) (5.23) (2.80) (36.35) (3.37) (1.34) (29.36) (4.47) (2.32) (31.86) (2.92) (1.27) (23.92) (3.98) (2.21) (26.74) Table 2: Ablation study. We compare the results of EPE over all pixels (ALL), non-occluded pixels (NOC) and occluded pixels (OCC) under different settings. Bold fonts highlight the best results. Method Sintel Sintel KITTI KITTI Clean Final MODOF 0.48 OccAware-ft (0.54) (0.48) MultiFrameOcc-Soft+ft (0.49) (0.44) 0.91 Ours (0.59) (0.52) Table 3: Comparison to state-of-the-art occlusion estimation methods. marks cases where the occlusion map is sparse and only the annotated pixels are considered. more significant. On KITT012 testing set, DD yields an EPE=3.0, 28.6 % lower than the best existing counterpart (EPE=4.2 from (Wang et al. 2018)). For the ranking measurement on KITT012, we achieve Fl-noc=4.57 %, even better than the result (4.82 %) from the well-known Net 2.0. For KITT015, DD performs particularly well. The Fl-all from DD reaches 14.29%, not only better than the best unsupervised method by a large margin (37.7 % relative improvement), but also outperforming several recent fully supervised learning methods including (Ranjan and Black 2017; Bailer, Varanasi, and Stricker 2017; Zweig and Wolf 2017; Xu, Ranftl, and Koltun 2017). Example results from KITT012 and 2015 can be seen in Figure 5. Estimation Next, we evaluate our occlusion estimation on both Sintel and KITTI dataset. We compare our method with MODOF(Xu, Jia, and Matsushita 2012), OccAwareft(Wang et al. 2018), MultiFrameOcc-Soft+ft(Janai et al. 2018) using F-measure. Note KITTI datasets only have sparse occlusion map. As shown in Table 3, our method achieve best occlusion estimation performance on Sintel Clean and Sintel Final datasets over all competing methods. On KITTI dataset, the ground truth occlusion masks only contain pixels moving out of the image boundary. However, our method will also estimate the occlusions within the image range. Under such settings, our method can achieve comparable performance. Ablation Study We conduct a thorough ablation analysis for different components of DDflow. We report our findings in Table 2. Handling. Comparing the first row and the second row, the third row and the fourth row, we can see that occlusion handling can improve the optical flow estimation performance over all pixels, non-occluded pixels and occluded pixels on all datasets. It is because that brightness constancy assumption does not hold for occluded pixels. Census Transform. Census transform can compensate for illumination changes, which is robust for optical flow estimation and has been widely used in traditional methods. Comparing the first row and the third row, the second row and the fourth row, we can see that it indeed constantly improves the performance on all datasets. Data Distillation. Since brightness constancy assumption does not hold for occluded pixels and there is no ground truth flow for occluded pixels, we introduce a data distillation loss to address this problem. As shown in the fourth row and the fifth row, occluded prediction can improve the performance on all datasets, especially for occluded pixels. EPE-OCC decreases from to (by 18.5 %) on Sintel Clean, from to (by 16.1 %) on Sintel Final dataset, from to (by 58.2 %) on KITT012 and from to (by 42.1 %) on KITT015. Such a big improvement demonstrates the effectiveness of DD. Our distillation strategy works particularly well near image boundary, since our teacher model can distill reliable labels for these pixels. For occluded pixels elsewhere, our method is not as effective, but still produces reasonable results to some extent. This is because we crop at random location for student model, which covers a large amount of occlusions. Exploring new ideas to cope with occluded pixels at any location can be a promising research direction in the future. Conclusion We have presented a data distillation approach to learn optical flow from unlabeled data. We have shown that CNNs can be self-trained to estimate optical flow, even for occluded pixels, without using any human annotations. To this end, we construct two networks. The predictions from the teacher network are used as annotations to guide the student network to learn optical flow. Our method, DD, has achieved the highest accuracy among all prior unsupervised methods on all challenging optical flow benchmarks. Our work makes a step towards distilling optical flow knowledge from unlabeled data. Going forward, our results suggest that our data distillation technique may be a promising direction for advancing other vision tasks like stereo matching (Zbontar and LeCun 2016) or depth estimation (Eigen, Puhrsch, and Fergus 2014).
8 References Bailer, C.; Varanasi, K.; and Stricker, D Cnn-based patch matching for optical flow with thresholded hinge embedding loss. In CVPR. Bonneel, N.; Tompkin, J.; Sunkavalli, K.; Sun, D.; Paris, S.; and Pfister, H Blind video temporal consistency. ACM Trans. Graph. 34(6):196:1 196:9. Brox, T., and Malik, J Large displacement optical flow: descriptor matching in variational motion estimation. TPAMI 33(3): Brox, T.; Bruhn, A.; Papenberg, N.; and Weickert, J High accuracy optical flow estimation based on a theory for warping. In ECCV. Butler, D. J.; Wulff, J.; Stanley, G. B.; and Black, M. J A naturalistic open source movie for optical flow evaluation. In ECCV. Chauhan, A. K., and Krishan, P Moving object tracking using gaussian mixture model and optical flow. International Journal of Advanced Research in Computer Science and Software Engineering 3(4). Dosovitskiy, A.; Fischer, P.; Ilg, E.; Hausser, P.; Hazirbas, C.; Golkov, V.; Van Der Smagt, P.; Cremers, D.; and Brox, T net: Learning optical flow with convolutional networks. In ICCV. Eigen, D.; Puhrsch, C.; and Fergus, R Depth map prediction from a single image using a multi-scale deep network. In NIPS. Geiger, A.; Lenz, P.; and Urtasun, R Are we ready for autonomous driving? the kitti vision benchmark suite. In CVPR. Hafner, D.; Demetz, O.; and Weickert, J Why is the census transform good for robust optic flow computation? In International Conference on Scale Space and Variational Methods in Computer Vision. Hinton, G.; Vinyals, O.; and Dean, J Distilling the knowledge in a neural network. arxiv preprint arxiv: Horn, B. K., and Schunck, B. G Determining optical flow. Artificial intelligence 17(1-3): Hui, T.-W.; Tang, X.; and Loy, C. C Liteflownet: A lightweight convolutional neural network for optical flow estimation. In CVPR. Ilg, E.; Mayer, N.; Saikia, T.; Keuper, M.; Dosovitskiy, A.; and Brox, T net 2.0: Evolution of optical flow estimation with deep networks. In CVPR. Janai, J.; Güney, F.; Ranjan, A.; Black, M. J.; and Geiger, A Unsupervised learning of multi-frame optical flow with occlusions. In ECCV. Jason, J. Y.; Harley, A. W.; and Derpanis, K. G Back to basics: Unsupervised learning of optical flow via brightness constancy and motion smoothness. In ECCV. Kingma, D. P., and Ba, J Adam: A method for stochastic optimization. arxiv preprint arxiv: Liu, C.; Freeman, W. T.; Adelson, E. H.; and Weiss, Y Human-assisted motion annotation. In CVPR. Mayer, N.; Ilg, E.; Hausser, P.; Fischer, P.; Cremers, D.; Dosovitskiy, A.; and Brox, T A large dataset to train convolutional networks for disparity, optical flow, and scene flow estimation. In CVPR. Meister, S.; Hur, J.; and Roth, S Un: Unsupervised learning of optical flow with a bidirectional census loss. In AAAI. Menze, M., and Geiger, A Object scene flow for autonomous vehicles. In CVPR. Radosavovic, I.; Dollár, P.; Girshick, R.; Gkioxari, G.; and He, K Data distillation: Towards omni-supervised learning. CVPR. Ranjan, A., and Black, M. J Optical flow estimation using a spatial pyramid network. In CVPR. Ren, Z.; Yan, J.; Ni, B.; Liu, B.; Yang, X.; and Zha, H Unsupervised deep learning for optical flow estimation. In AAAI. Revaud, J.; Weinzaepfel, P.; Harchaoui, Z.; and Schmid, C Epicflow: Edge-preserving interpolation of correspondences for optical flow. In CVPR. Simonyan, K., and Zisserman, A Two-stream convolutional networks for action recognition in videos. In NIPS. Sun, D.; Yang, X.; Liu, M.-Y.; and Kautz, J Pwcnet: Cnns for optical flow using pyramid, warping, and cost volume. In CVPR. Sun, D.; Roth, S.; and Black, M. J Secrets of optical flow estimation and their principles. In CVPR. Sundaram, N.; Brox, T.; and Keutzer, K Dense point trajectories by gpu-accelerated large displacement optical flow. In ECCV. Wang, Y.; Yang, Y.; Yang, Z.; Zhao, L.; and Xu, W aware unsupervised learning of optical flow. In CVPR. Weinzaepfel, P.; Revaud, J.; Harchaoui, Z.; and Schmid, C Deepflow: Large displacement optical flow with deep matching. In ICCV. Xu, L.; Jia, J.; and Matsushita, Y Motion detail preserving optical flow estimation. TPAMI 34(9): Xu, J.; Ranftl, R.; and Koltun, V Accurate Optical via Direct Cost Volume Processing. In CVPR. Zabih, R., and Woodfill, J Non-parametric local transforms for computing visual correspondence. In ECCV. Zbontar, J., and LeCun, Y Stereo matching by training a convolutional neural network to compare image patches. JMLR 17(1-32):2. Zweig, S., and Wolf, L Interponet, a brain inspired neural network for optical flow dense interpolation. In CVPR.
MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS. Mustafa Ozan Tezcan
 MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS Mustafa Ozan Tezcan Boston University Department of Electrical and Computer Engineering 8 Saint Mary s Street Boston, MA 2215 www.bu.edu/ece Dec. 19,
MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS Mustafa Ozan Tezcan Boston University Department of Electrical and Computer Engineering 8 Saint Mary s Street Boston, MA 2215 www.bu.edu/ece Dec. 19,
UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss
 UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss AAAI 2018, New Orleans, USA Simon Meister, Junhwa Hur, and Stefan Roth Department of Computer Science, TU Darmstadt 2 Deep
UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss AAAI 2018, New Orleans, USA Simon Meister, Junhwa Hur, and Stefan Roth Department of Computer Science, TU Darmstadt 2 Deep
arxiv: v2 [cs.cv] 4 Apr 2018
![arxiv: v2 [cs.cv] 4 Apr 2018](/thumbs/82/84891090.jpg "arxiv: v2 [cs.cv] 4 Apr 2018") Occlusion Aware Unsupervised Learning of Optical Flow Yang Wang 1 Yi Yang 1 Zhenheng Yang 2 Liang Zhao 1 Peng Wang 1 Wei Xu 1,3 1 Baidu Research 2 University of Southern California 3 National Engineering
Occlusion Aware Unsupervised Learning of Optical Flow Yang Wang 1 Yi Yang 1 Zhenheng Yang 2 Liang Zhao 1 Peng Wang 1 Wei Xu 1,3 1 Baidu Research 2 University of Southern California 3 National Engineering
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
PWC-Net: CNNs for Optical Flow Using Pyramid, Warping, and Cost Volume
 : CNNs for Optical Flow Using Pyramid, Warping, and Cost Volume Deqing Sun, Xiaodong Yang, Ming-Yu Liu, and Jan Kautz NVIDIA Abstract We present a compact but effective CNN model for optical flow, called.
: CNNs for Optical Flow Using Pyramid, Warping, and Cost Volume Deqing Sun, Xiaodong Yang, Ming-Yu Liu, and Jan Kautz NVIDIA Abstract We present a compact but effective CNN model for optical flow, called.
arxiv: v1 [cs.cv] 22 Jan 2016
![arxiv: v1 [cs.cv] 22 Jan 2016](/thumbs/76/73216866.jpg "arxiv: v1 [cs.cv] 22 Jan 2016") UNSUPERVISED CONVOLUTIONAL NEURAL NETWORKS FOR MOTION ESTIMATION Aria Ahmadi, Ioannis Patras School of Electronic Engineering and Computer Science Queen Mary University of London Mile End road, E1 4NS,
UNSUPERVISED CONVOLUTIONAL NEURAL NETWORKS FOR MOTION ESTIMATION Aria Ahmadi, Ioannis Patras School of Electronic Engineering and Computer Science Queen Mary University of London Mile End road, E1 4NS,
arxiv: v1 [cs.cv] 9 May 2018
![arxiv: v1 [cs.cv] 9 May 2018](/thumbs/89/97538145.jpg "arxiv: v1 [cs.cv] 9 May 2018") Layered Optical Flow Estimation Using a Deep Neural Network with a Soft Mask Xi Zhang, Di Ma, Xu Ouyang, Shanshan Jiang, Lin Gan, Gady Agam, Computer Science Department, Illinois Institute of Technology
Layered Optical Flow Estimation Using a Deep Neural Network with a Soft Mask Xi Zhang, Di Ma, Xu Ouyang, Shanshan Jiang, Lin Gan, Gady Agam, Computer Science Department, Illinois Institute of Technology
A Fusion Approach for Multi-Frame Optical Flow Estimation
 A Fusion Approach for Multi-Frame Optical Estimation Zhile Ren Orazio Gallo Deqing Sun Ming-Hsuan Yang Erik B. Sudderth Jan Kautz Georgia Tech NVIDIA UC Merced UC Irvine NVIDIA Abstract To date, top-performing
A Fusion Approach for Multi-Frame Optical Estimation Zhile Ren Orazio Gallo Deqing Sun Ming-Hsuan Yang Erik B. Sudderth Jan Kautz Georgia Tech NVIDIA UC Merced UC Irvine NVIDIA Abstract To date, top-performing
Joint Unsupervised Learning of Optical Flow and Depth by Watching Stereo Videos
 Joint Unsupervised Learning of Optical Flow and Depth by Watching Stereo Videos Yang Wang 1 Zhenheng Yang 2 Peng Wang 1 Yi Yang 1 Chenxu Luo 3 Wei Xu 1 1 Baidu Research 2 University of Southern California
Joint Unsupervised Learning of Optical Flow and Depth by Watching Stereo Videos Yang Wang 1 Zhenheng Yang 2 Peng Wang 1 Yi Yang 1 Chenxu Luo 3 Wei Xu 1 1 Baidu Research 2 University of Southern California
Semi-Supervised Learning for Optical Flow with Generative Adversarial Networks
 Semi-Supervised Learning for Optical Flow with Generative Adversarial Networks Wei-Sheng Lai 1 Jia-Bin Huang 2 Ming-Hsuan Yang 1,3 1 University of California, Merced 2 Virginia Tech 3 Nvidia Research 1
Semi-Supervised Learning for Optical Flow with Generative Adversarial Networks Wei-Sheng Lai 1 Jia-Bin Huang 2 Ming-Hsuan Yang 1,3 1 University of California, Merced 2 Virginia Tech 3 Nvidia Research 1
Supplementary Material for "FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks"
 Supplementary Material for "FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks" Architecture Datasets S short S long S fine FlowNetS FlowNetC Chairs 15.58 - - Chairs - 14.60 14.28 Things3D
Supplementary Material for "FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks" Architecture Datasets S short S long S fine FlowNetS FlowNetC Chairs 15.58 - - Chairs - 14.60 14.28 Things3D
arxiv: v1 [cs.cv] 7 May 2018
![arxiv: v1 [cs.cv] 7 May 2018](/thumbs/79/78829573.jpg "arxiv: v1 [cs.cv] 7 May 2018") LEARNING OPTICAL FLOW VIA DILATED NETWORKS AND OCCLUSION REASONING Yi Zhu and Shawn Newsam University of California, Merced 5200 N Lake Rd, Merced, CA, US {yzhu25, snewsam}@ucmerced.edu arxiv:1805.02733v1
LEARNING OPTICAL FLOW VIA DILATED NETWORKS AND OCCLUSION REASONING Yi Zhu and Shawn Newsam University of California, Merced 5200 N Lake Rd, Merced, CA, US {yzhu25, snewsam}@ucmerced.edu arxiv:1805.02733v1
Optical flow. Cordelia Schmid
 Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Fast Guided Global Interpolation for Depth and. Yu Li, Dongbo Min, Minh N. Do, Jiangbo Lu
 Fast Guided Global Interpolation for Depth and Yu Li, Dongbo Min, Minh N. Do, Jiangbo Lu Introduction Depth upsampling and motion interpolation are often required to generate a dense, high-quality, and
Fast Guided Global Interpolation for Depth and Yu Li, Dongbo Min, Minh N. Do, Jiangbo Lu Introduction Depth upsampling and motion interpolation are often required to generate a dense, high-quality, and
FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks
 Net 2.0: Evolution of Optical Estimation with Deep Networks Eddy Ilg, Nikolaus Mayer, Tonmoy Saikia, Margret Keuper, Alexey Dosovitskiy, Thomas Brox University of Freiburg, Germany {ilg,mayern,saikiat,keuper,dosovits,brox}@cs.uni-freiburg.de
Net 2.0: Evolution of Optical Estimation with Deep Networks Eddy Ilg, Nikolaus Mayer, Tonmoy Saikia, Margret Keuper, Alexey Dosovitskiy, Thomas Brox University of Freiburg, Germany {ilg,mayern,saikiat,keuper,dosovits,brox}@cs.uni-freiburg.de
Models Matter, So Does Training: An Empirical Study of CNNs for Optical Flow Estimation
 1 Models Matter, So Does Training: An Empirical Study of CNNs for Optical Flow Estimation Deqing Sun, Xiaodong Yang, Ming-Yu Liu, and Jan Kautz arxiv:1809.05571v1 [cs.cv] 14 Sep 2018 Abstract We investigate
1 Models Matter, So Does Training: An Empirical Study of CNNs for Optical Flow Estimation Deqing Sun, Xiaodong Yang, Ming-Yu Liu, and Jan Kautz arxiv:1809.05571v1 [cs.cv] 14 Sep 2018 Abstract We investigate
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
arxiv: v1 [cs.cv] 30 Nov 2017
![arxiv: v1 [cs.cv] 30 Nov 2017](/thumbs/75/71644976.jpg "arxiv: v1 [cs.cv] 30 Nov 2017") Super SloMo: High Quality Estimation of Multiple Intermediate Frames for Video Interpolation Huaizu Jiang 1 Deqing Sun 2 Varun Jampani 2 Ming-Hsuan Yang 3,2 Erik Learned-Miller 1 Jan Kautz 2 1 UMass Amherst
Super SloMo: High Quality Estimation of Multiple Intermediate Frames for Video Interpolation Huaizu Jiang 1 Deqing Sun 2 Varun Jampani 2 Ming-Hsuan Yang 3,2 Erik Learned-Miller 1 Jan Kautz 2 1 UMass Amherst
arxiv: v1 [cs.cv] 21 Sep 2018
![arxiv: v1 [cs.cv] 21 Sep 2018](/thumbs/87/95557631.jpg "arxiv: v1 [cs.cv] 21 Sep 2018") Temporal Interpolation as an Unsupervised Pretraining Task for Optical Flow Estimation Jonas Wulff 1,2 Michael J. Black 1 arxiv:1809.08317v1 [cs.cv] 21 Sep 2018 1 Max-Planck Institute for Intelligent Systems,
Temporal Interpolation as an Unsupervised Pretraining Task for Optical Flow Estimation Jonas Wulff 1,2 Michael J. Black 1 arxiv:1809.08317v1 [cs.cv] 21 Sep 2018 1 Max-Planck Institute for Intelligent Systems,
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Occlusions, Motion and Depth Boundaries with a Generic Network for Disparity, Optical Flow or Scene Flow Estimation
 Occlusions, Motion and Depth Boundaries with a Generic Network for Disparity, Optical Flow or Scene Flow Estimation Eddy Ilg *, Tonmoy Saikia *, Margret Keuper, and Thomas Brox University of Freiburg,
Occlusions, Motion and Depth Boundaries with a Generic Network for Disparity, Optical Flow or Scene Flow Estimation Eddy Ilg *, Tonmoy Saikia *, Margret Keuper, and Thomas Brox University of Freiburg,
Unsupervised Learning of Stereo Matching
 Unsupervised Learning of Stereo Matching Chao Zhou 1 Hong Zhang 1 Xiaoyong Shen 2 Jiaya Jia 1,2 1 The Chinese University of Hong Kong 2 Youtu Lab, Tencent {zhouc, zhangh}@cse.cuhk.edu.hk dylanshen@tencent.com
Unsupervised Learning of Stereo Matching Chao Zhou 1 Hong Zhang 1 Xiaoyong Shen 2 Jiaya Jia 1,2 1 The Chinese University of Hong Kong 2 Youtu Lab, Tencent {zhouc, zhangh}@cse.cuhk.edu.hk dylanshen@tencent.com
arxiv: v1 [cs.cv] 6 Dec 2016
![arxiv: v1 [cs.cv] 6 Dec 2016](/thumbs/73/69202460.jpg "arxiv: v1 [cs.cv] 6 Dec 2016") FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks Eddy Ilg, Nikolaus Mayer, Tonmoy Saikia, Margret Keuper, Alexey Dosovitskiy, Thomas Brox University of Freiburg, Germany arxiv:1612.01925v1
FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks Eddy Ilg, Nikolaus Mayer, Tonmoy Saikia, Margret Keuper, Alexey Dosovitskiy, Thomas Brox University of Freiburg, Germany arxiv:1612.01925v1
Efficient Coarse-to-Fine PatchMatch for Large Displacement Optical Flow
 Efficient Coarse-to-Fine PatchMatch for Large Displacement Optical Flow Yinlin Hu 1 Rui Song 1,2 Yunsong Li 1, huyinlin@gmail.com rsong@xidian.edu.cn ysli@mail.xidian.edu.cn 1 Xidian University, China
Efficient Coarse-to-Fine PatchMatch for Large Displacement Optical Flow Yinlin Hu 1 Rui Song 1,2 Yunsong Li 1, huyinlin@gmail.com rsong@xidian.edu.cn ysli@mail.xidian.edu.cn 1 Xidian University, China
Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation
 Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation Menandro Roxas Takeshi Oishi Institute of Industrial Science, The University of Tokyo roxas, oishi @cvl.iis.u-tokyo.ac.jp Abstract We
Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation Menandro Roxas Takeshi Oishi Institute of Industrial Science, The University of Tokyo roxas, oishi @cvl.iis.u-tokyo.ac.jp Abstract We
OPTICAL flow, a formulation of the dense correspondence. for Dense Correspondence. Yunsong Li, Yinlin Hu, Rui Song, Peng Rao and Yangli Wang
 1 Coarse-to-fine PatchMatch for Dense Correspondence Yunsong Li, Yinlin Hu, Rui Song, Peng Rao and Yangli Wang Abstract Although the matching technique has been studied in various areas of computer vision
1 Coarse-to-fine PatchMatch for Dense Correspondence Yunsong Li, Yinlin Hu, Rui Song, Peng Rao and Yangli Wang Abstract Although the matching technique has been studied in various areas of computer vision
Video Frame Interpolation Using Recurrent Convolutional Layers
 2018 IEEE Fourth International Conference on Multimedia Big Data (BigMM) Video Frame Interpolation Using Recurrent Convolutional Layers Zhifeng Zhang 1, Li Song 1,2, Rong Xie 2, Li Chen 1 1 Institute of
2018 IEEE Fourth International Conference on Multimedia Big Data (BigMM) Video Frame Interpolation Using Recurrent Convolutional Layers Zhifeng Zhang 1, Li Song 1,2, Rong Xie 2, Li Chen 1 1 Institute of
Conditional Prior Networks for Optical Flow
 Conditional Prior Networks for Optical Flow Yanchao Yang Stefano Soatto UCLA Vision Lab University of California, Los Angeles, CA 90095 {yanchao.yang, soatto}@cs.ucla.edu Abstract. Classical computation
Conditional Prior Networks for Optical Flow Yanchao Yang Stefano Soatto UCLA Vision Lab University of California, Los Angeles, CA 90095 {yanchao.yang, soatto}@cs.ucla.edu Abstract. Classical computation
Flow Estimation. Min Bai. February 8, University of Toronto. Min Bai (UofT) Flow Estimation February 8, / 47
 Flow Estimation February 8, / 47") Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Spatio-Temporal Transformer Network for Video Restoration
 Spatio-Temporal Transformer Network for Video Restoration Tae Hyun Kim 1,2, Mehdi S. M. Sajjadi 1,3, Michael Hirsch 1,4, Bernhard Schölkopf 1 1 Max Planck Institute for Intelligent Systems, Tübingen, Germany
Spatio-Temporal Transformer Network for Video Restoration Tae Hyun Kim 1,2, Mehdi S. M. Sajjadi 1,3, Michael Hirsch 1,4, Bernhard Schölkopf 1 1 Max Planck Institute for Intelligent Systems, Tübingen, Germany
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES
 EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES J. Liu 1, S. Ji 1,*, C. Zhang 1, Z. Qin 1 1 School of Remote Sensing and Information Engineering, Wuhan University,
EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES J. Liu 1, S. Ji 1,*, C. Zhang 1, Z. Qin 1 1 School of Remote Sensing and Information Engineering, Wuhan University,
Supplemental Material for End-to-End Learning of Video Super-Resolution with Motion Compensation
 Supplemental Material for End-to-End Learning of Video Super-Resolution with Motion Compensation Osama Makansi, Eddy Ilg, and Thomas Brox Department of Computer Science, University of Freiburg 1 Computation
Supplemental Material for End-to-End Learning of Video Super-Resolution with Motion Compensation Osama Makansi, Eddy Ilg, and Thomas Brox Department of Computer Science, University of Freiburg 1 Computation
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
A Deep Learning Approach to Vehicle Speed Estimation
 A Deep Learning Approach to Vehicle Speed Estimation Benjamin Penchas bpenchas@stanford.edu Tobin Bell tbell@stanford.edu Marco Monteiro marcorm@stanford.edu ABSTRACT Given car dashboard video footage,
A Deep Learning Approach to Vehicle Speed Estimation Benjamin Penchas bpenchas@stanford.edu Tobin Bell tbell@stanford.edu Marco Monteiro marcorm@stanford.edu ABSTRACT Given car dashboard video footage,
Perceptual Loss for Convolutional Neural Network Based Optical Flow Estimation. Zong-qing LU, Xiang ZHU and Qing-min LIAO *
 2017 2nd International Conference on Software, Multimedia and Communication Engineering (SMCE 2017) ISBN: 978-1-60595-458-5 Perceptual Loss for Convolutional Neural Network Based Optical Flow Estimation
2017 2nd International Conference on Software, Multimedia and Communication Engineering (SMCE 2017) ISBN: 978-1-60595-458-5 Perceptual Loss for Convolutional Neural Network Based Optical Flow Estimation
arxiv: v2 [cs.cv] 14 May 2018
![arxiv: v2 [cs.cv] 14 May 2018](/thumbs/79/79495201.jpg "arxiv: v2 [cs.cv] 14 May 2018") ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Two-Stream Convolutional Networks for Action Recognition in Videos
 Two-Stream Convolutional Networks for Action Recognition in Videos Karen Simonyan Andrew Zisserman Cemil Zalluhoğlu Introduction Aim Extend deep Convolution Networks to action recognition in video. Motivation
Two-Stream Convolutional Networks for Action Recognition in Videos Karen Simonyan Andrew Zisserman Cemil Zalluhoğlu Introduction Aim Extend deep Convolution Networks to action recognition in video. Motivation
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
CNN-based Patch Matching for Optical Flow with Thresholded Hinge Embedding Loss
 CNN-based Patch Matching for Optical Flow with Thresholded Hinge Embedding Loss Christian Bailer 1 Kiran Varanasi 1 Didier Stricker 1,2 Christian.Bailer@dfki.de Kiran.Varanasi@dfki.de Didier.Stricker@dfki.de
CNN-based Patch Matching for Optical Flow with Thresholded Hinge Embedding Loss Christian Bailer 1 Kiran Varanasi 1 Didier Stricker 1,2 Christian.Bailer@dfki.de Kiran.Varanasi@dfki.de Didier.Stricker@dfki.de
Flow Fields: Dense Correspondence Fields for Highly Accurate Large Displacement Optical Flow Estimation
 Flow Fields: Dense Correspondence Fields for Highly Accurate Large Displacement Optical Flow Estimation Christian Bailer1 Christian.Bailer@dfki.de 1 Bertram Taetz1,2 Bertram.Taetz@dfki.de Didier Stricker1,2
Flow Fields: Dense Correspondence Fields for Highly Accurate Large Displacement Optical Flow Estimation Christian Bailer1 Christian.Bailer@dfki.de 1 Bertram Taetz1,2 Bertram.Taetz@dfki.de Didier Stricker1,2
UNSUPERVISED STEREO MATCHING USING CORRESPONDENCE CONSISTENCY. Sunghun Joung Seungryong Kim Bumsub Ham Kwanghoon Sohn
 UNSUPERVISED STEREO MATCHING USING CORRESPONDENCE CONSISTENCY Sunghun Joung Seungryong Kim Bumsub Ham Kwanghoon Sohn School of Electrical and Electronic Engineering, Yonsei University, Seoul, Korea E-mail:
UNSUPERVISED STEREO MATCHING USING CORRESPONDENCE CONSISTENCY Sunghun Joung Seungryong Kim Bumsub Ham Kwanghoon Sohn School of Electrical and Electronic Engineering, Yonsei University, Seoul, Korea E-mail:
Deep Optical Flow Estimation Via Multi-Scale Correspondence Structure Learning
 Deep Optical Flow Estimation Via Multi-Scale Correspondence Structure Learning Shanshan Zhao 1, Xi Li 1,2,, Omar El Farouk Bourahla 1 1 Zhejiang University, Hangzhou, China 2 Alibaba-Zhejiang University
Deep Optical Flow Estimation Via Multi-Scale Correspondence Structure Learning Shanshan Zhao 1, Xi Li 1,2,, Omar El Farouk Bourahla 1 1 Zhejiang University, Hangzhou, China 2 Alibaba-Zhejiang University
Exploiting Semantic Information and Deep Matching for Optical Flow
 Exploiting Semantic Information and Deep Matching for Optical Flow Min Bai, Wenjie Luo, Kaustav Kundu, Raquel Urtasun Department of Computer Science, University of Toronto {mbai, wenjie, kkundu, urtasun}@cs.toronto.edu
Exploiting Semantic Information and Deep Matching for Optical Flow Min Bai, Wenjie Luo, Kaustav Kundu, Raquel Urtasun Department of Computer Science, University of Toronto {mbai, wenjie, kkundu, urtasun}@cs.toronto.edu
Comparison of stereo inspired optical flow estimation techniques
 Comparison of stereo inspired optical flow estimation techniques ABSTRACT The similarity of the correspondence problems in optical flow estimation and disparity estimation techniques enables methods to
Comparison of stereo inspired optical flow estimation techniques ABSTRACT The similarity of the correspondence problems in optical flow estimation and disparity estimation techniques enables methods to
Robust Local Optical Flow: Dense Motion Vector Field Interpolation
 Robust Local Optical Flow: Dense Motion Vector Field Interpolation Jonas Geistert geistert@nue.tu-berlin.de Tobias Senst senst@nue.tu-berlin.de Thomas Sikora sikora@nue.tu-berlin.de Abstract Optical flow
Robust Local Optical Flow: Dense Motion Vector Field Interpolation Jonas Geistert geistert@nue.tu-berlin.de Tobias Senst senst@nue.tu-berlin.de Thomas Sikora sikora@nue.tu-berlin.de Abstract Optical flow
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
arxiv: v1 [cs.cv] 23 Mar 2018
![arxiv: v1 [cs.cv] 23 Mar 2018](/thumbs/85/93001669.jpg "arxiv: v1 [cs.cv] 23 Mar 2018") Pyramid Stereo Matching Network Jia-Ren Chang Yong-Sheng Chen Department of Computer Science, National Chiao Tung University, Taiwan {followwar.cs00g, yschen}@nctu.edu.tw arxiv:03.0669v [cs.cv] 3 Mar 0
Pyramid Stereo Matching Network Jia-Ren Chang Yong-Sheng Chen Department of Computer Science, National Chiao Tung University, Taiwan {followwar.cs00g, yschen}@nctu.edu.tw arxiv:03.0669v [cs.cv] 3 Mar 0
Combining Stereo Disparity and Optical Flow for Basic Scene Flow
 Combining Stereo Disparity and Optical Flow for Basic Scene Flow René Schuster, Christian Bailer, Oliver Wasenmüller, Didier Stricker DFKI German Research Center for Artificial Intelligence firstname.lastname@dfki.de
Combining Stereo Disparity and Optical Flow for Basic Scene Flow René Schuster, Christian Bailer, Oliver Wasenmüller, Didier Stricker DFKI German Research Center for Artificial Intelligence firstname.lastname@dfki.de
arxiv: v1 [cs.cv] 16 Nov 2015
![arxiv: v1 [cs.cv] 16 Nov 2015](/thumbs/85/92600288.jpg "arxiv: v1 [cs.cv] 16 Nov 2015") Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
LEARNING RIGIDITY IN DYNAMIC SCENES FOR SCENE FLOW ESTIMATION
 LEARNING RIGIDITY IN DYNAMIC SCENES FOR SCENE FLOW ESTIMATION Kihwan Kim, Senior Research Scientist Zhaoyang Lv, Kihwan Kim, Alejandro Troccoli, Deqing Sun, James M. Rehg, Jan Kautz CORRESPENDECES IN COMPUTER
LEARNING RIGIDITY IN DYNAMIC SCENES FOR SCENE FLOW ESTIMATION Kihwan Kim, Senior Research Scientist Zhaoyang Lv, Kihwan Kim, Alejandro Troccoli, Deqing Sun, James M. Rehg, Jan Kautz CORRESPENDECES IN COMPUTER
arxiv: v2 [cs.cv] 7 Oct 2018
![arxiv: v2 [cs.cv] 7 Oct 2018](/thumbs/92/110264683.jpg "arxiv: v2 [cs.cv] 7 Oct 2018") Competitive Collaboration: Joint Unsupervised Learning of Depth, Camera Motion, Optical Flow and Motion Segmentation Anurag Ranjan 1 Varun Jampani 2 arxiv:1805.09806v2 [cs.cv] 7 Oct 2018 Kihwan Kim 2 Deqing
Competitive Collaboration: Joint Unsupervised Learning of Depth, Camera Motion, Optical Flow and Motion Segmentation Anurag Ranjan 1 Varun Jampani 2 arxiv:1805.09806v2 [cs.cv] 7 Oct 2018 Kihwan Kim 2 Deqing
Optical flow. Cordelia Schmid
 Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
DENSENET FOR DENSE FLOW. Yi Zhu and Shawn Newsam. University of California, Merced 5200 N Lake Rd, Merced, CA, US {yzhu25,
 ENSENET FOR ENSE FLOW Yi Zhu and Shawn Newsam University of California, Merced 5200 N Lake Rd, Merced, CA, US {yzhu25, snewsam}@ucmerced.edu ASTRACT Classical approaches for estimating optical flow have
ENSENET FOR ENSE FLOW Yi Zhu and Shawn Newsam University of California, Merced 5200 N Lake Rd, Merced, CA, US {yzhu25, snewsam}@ucmerced.edu ASTRACT Classical approaches for estimating optical flow have
Learning visual odometry with a convolutional network
 Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
Accurate Optical Flow via Direct Cost Volume Processing
 Accurate Optical Flow via Direct Cost Volume Processing Jia Xu René Ranftl Vladlen Koltun Intel Labs Abstract We present an optical flow estimation approach that operates on the full four-dimensional cost
Accurate Optical Flow via Direct Cost Volume Processing Jia Xu René Ranftl Vladlen Koltun Intel Labs Abstract We present an optical flow estimation approach that operates on the full four-dimensional cost
Stereo Matching, Optical Flow, Filling the Gaps and more
 Stereo Matching, Optical Flow, Filling the Gaps and more Prof. Lior Wolf The School of Computer Science, Tel-Aviv University ICRI-CI 2017 Retreat, May 9, 2017 Since last year, ICRI-CI supported projects
Stereo Matching, Optical Flow, Filling the Gaps and more Prof. Lior Wolf The School of Computer Science, Tel-Aviv University ICRI-CI 2017 Retreat, May 9, 2017 Since last year, ICRI-CI supported projects
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Depth Learning: When Depth Estimation Meets Deep Learning
 Depth Learning: When Depth Estimation Meets Deep Learning Prof. Liang LIN SenseTime Research & Sun Yat-sen University NITRE, June 18, 2018 Outline Part 1. Introduction Motivation Stereo Matching Single
Depth Learning: When Depth Estimation Meets Deep Learning Prof. Liang LIN SenseTime Research & Sun Yat-sen University NITRE, June 18, 2018 Outline Part 1. Introduction Motivation Stereo Matching Single
arxiv: v1 [cs.cv] 11 Apr 2016
![arxiv: v1 [cs.cv] 11 Apr 2016](/thumbs/89/98111250.jpg "arxiv: v1 [cs.cv] 11 Apr 2016") Beyond Brightness Constancy: Learning Noise Models for Optical Flow arxiv:1604.02815v1 [cs.cv] 11 Apr 2016 Dan Rosenbaum School of Computer Science and Engineering Hebrew University of Jerusalem www.cs.huji.ac.il/
Beyond Brightness Constancy: Learning Noise Models for Optical Flow arxiv:1604.02815v1 [cs.cv] 11 Apr 2016 Dan Rosenbaum School of Computer Science and Engineering Hebrew University of Jerusalem www.cs.huji.ac.il/
arxiv: v2 [cs.cv] 28 Mar 2018
![arxiv: v2 [cs.cv] 28 Mar 2018](/thumbs/77/75965075.jpg "arxiv: v2 [cs.cv] 28 Mar 2018") Learning for Disparity Estimation through Feature Constancy Zhengfa Liang Yiliu Feng Yulan Guo Hengzhu Liu Wei Chen Linbo Qiao Li Zhou Jianfeng Zhang arxiv:1712.01039v2 [cs.cv] 28 Mar 2018 National University
Learning for Disparity Estimation through Feature Constancy Zhengfa Liang Yiliu Feng Yulan Guo Hengzhu Liu Wei Chen Linbo Qiao Li Zhou Jianfeng Zhang arxiv:1712.01039v2 [cs.cv] 28 Mar 2018 National University
Deep Learning For Image Registration
 Deep Learning For Image Registration Yiping Lu School Of Mathmatical Science Peking university. luyiping9712@pku.edu.cn Abstract Image registration is an important task in computer vision and image processing
Deep Learning For Image Registration Yiping Lu School Of Mathmatical Science Peking university. luyiping9712@pku.edu.cn Abstract Image registration is an important task in computer vision and image processing
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material
 Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material Ayush Tewari 1,2 Michael Zollhöfer 1,2,3 Pablo Garrido 1,2 Florian Bernard 1,2 Hyeongwoo
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material Ayush Tewari 1,2 Michael Zollhöfer 1,2,3 Pablo Garrido 1,2 Florian Bernard 1,2 Hyeongwoo
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
arxiv: v2 [cs.cv] 9 Mar 2018
![arxiv: v2 [cs.cv] 9 Mar 2018](/thumbs/80/82468949.jpg "arxiv: v2 [cs.cv] 9 Mar 2018") Single View Stereo Matching Yue Luo 1 Jimmy Ren 1 Mude Lin 1 Jiahao Pang 1 Wenxiu Sun 1 Hongsheng Li 2 Liang Lin 1,3 arxiv:1803.02612v2 [cs.cv] 9 Mar 2018 1 SenseTime Research 2 The Chinese University
Single View Stereo Matching Yue Luo 1 Jimmy Ren 1 Mude Lin 1 Jiahao Pang 1 Wenxiu Sun 1 Hongsheng Li 2 Liang Lin 1,3 arxiv:1803.02612v2 [cs.cv] 9 Mar 2018 1 SenseTime Research 2 The Chinese University
CS231N Section. Video Understanding 6/1/2018
 CS231N Section Video Understanding 6/1/2018 Outline Background / Motivation / History Video Datasets Models Pre-deep learning CNN + RNN 3D convolution Two-stream What we ve seen in class so far... Image
CS231N Section Video Understanding 6/1/2018 Outline Background / Motivation / History Video Datasets Models Pre-deep learning CNN + RNN 3D convolution Two-stream What we ve seen in class so far... Image
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Structure-from-Motion-Aware PatchMatch for Adaptive Optical Flow Estimation
 Structure-from-Motion-Aware PatchMatch for Adaptive Optical Flow Estimation Daniel Maurer 1[0000 0002 3835 2138], Nico Marniok 2, Bastian Goldluecke 2[0000 0003 3427 4029], and Andrés Bruhn 1[0000 0003
Structure-from-Motion-Aware PatchMatch for Adaptive Optical Flow Estimation Daniel Maurer 1[0000 0002 3835 2138], Nico Marniok 2, Bastian Goldluecke 2[0000 0003 3427 4029], and Andrés Bruhn 1[0000 0003
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation
 AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
Camera-based Vehicle Velocity Estimation using Spatiotemporal Depth and Motion Features
 Camera-based Vehicle Velocity Estimation using Spatiotemporal Depth and Motion Features Moritz Kampelmuehler* kampelmuehler@student.tugraz.at Michael Mueller* michael.g.mueller@student.tugraz.at Christoph
Camera-based Vehicle Velocity Estimation using Spatiotemporal Depth and Motion Features Moritz Kampelmuehler* kampelmuehler@student.tugraz.at Michael Mueller* michael.g.mueller@student.tugraz.at Christoph
Slow Flow: Exploiting High-Speed Cameras for Accurate and Diverse Optical Flow Reference Data
 Slow Flow: Exploiting High-Speed Cameras for Accurate and Diverse Optical Flow Reference Data Joel Janai1 Fatma Gu ney1 Jonas Wulff2 Michael Black2 Andreas Geiger1,3 1 Autonomous Vision Group, MPI for
Slow Flow: Exploiting High-Speed Cameras for Accurate and Diverse Optical Flow Reference Data Joel Janai1 Fatma Gu ney1 Jonas Wulff2 Michael Black2 Andreas Geiger1,3 1 Autonomous Vision Group, MPI for
Scale Invariant Optical Flow
 Scale Invariant Optical Flow Li Xu Zhenlong Dai Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong {xuli,zldai,leojia}@cse.cuhk.edu.hk Abstract. Scale variation
Scale Invariant Optical Flow Li Xu Zhenlong Dai Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong {xuli,zldai,leojia}@cse.cuhk.edu.hk Abstract. Scale variation
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
SURVEY OF LOCAL AND GLOBAL OPTICAL FLOW WITH COARSE TO FINE METHOD
 SURVEY OF LOCAL AND GLOBAL OPTICAL FLOW WITH COARSE TO FINE METHOD M.E-II, Department of Computer Engineering, PICT, Pune ABSTRACT: Optical flow as an image processing technique finds its applications
SURVEY OF LOCAL AND GLOBAL OPTICAL FLOW WITH COARSE TO FINE METHOD M.E-II, Department of Computer Engineering, PICT, Pune ABSTRACT: Optical flow as an image processing technique finds its applications
Supplementary Material The Best of Both Worlds: Combining CNNs and Geometric Constraints for Hierarchical Motion Segmentation
 Supplementary Material The Best of Both Worlds: Combining CNNs and Geometric Constraints for Hierarchical Motion Segmentation Pia Bideau Aruni RoyChowdhury Rakesh R Menon Erik Learned-Miller University
Supplementary Material The Best of Both Worlds: Combining CNNs and Geometric Constraints for Hierarchical Motion Segmentation Pia Bideau Aruni RoyChowdhury Rakesh R Menon Erik Learned-Miller University
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
arxiv: v1 [cs.cv] 16 Nov 2017
![arxiv: v1 [cs.cv] 16 Nov 2017](/thumbs/77/76133890.jpg "arxiv: v1 [cs.cv] 16 Nov 2017") Frame Interpolation with Multi-Scale Deep Loss Functions and Generative Adversarial Networks arxiv:1711.06045v1 [cs.cv] 16 Nov 2017 Joost van Amersfoort, Wenzhe Shi, Alejandro Acosta, Francisco Massa,
Frame Interpolation with Multi-Scale Deep Loss Functions and Generative Adversarial Networks arxiv:1711.06045v1 [cs.cv] 16 Nov 2017 Joost van Amersfoort, Wenzhe Shi, Alejandro Acosta, Francisco Massa,
ACCURATE estimation of optical flow is a useful but challenging. Pyramidal Gradient Matching for Optical Flow Estimation
 1 Pyramidal Gradient Matching for Optical Flow Estimation Yuanwei Li arxiv:1704.03217v1 [cs.cv] 11 Apr 2017 Abstract Initializing optical flow field by either sparse descriptor matching or dense patch
1 Pyramidal Gradient Matching for Optical Flow Estimation Yuanwei Li arxiv:1704.03217v1 [cs.cv] 11 Apr 2017 Abstract Initializing optical flow field by either sparse descriptor matching or dense patch
Motion Estimation (II) Ce Liu Microsoft Research New England
 Ce Liu Microsoft Research New England") Motion Estimation (II) Ce Liu celiu@microsoft.com Microsoft Research New England Last time Motion perception Motion representation Parametric motion: Lucas-Kanade T I x du dv = I x I T x I y I x T I y
Motion Estimation (II) Ce Liu celiu@microsoft.com Microsoft Research New England Last time Motion perception Motion representation Parametric motion: Lucas-Kanade T I x du dv = I x I T x I y I x T I y
arxiv: v1 [cs.cv] 13 Dec 2018
![arxiv: v1 [cs.cv] 13 Dec 2018](/thumbs/92/108764739.jpg "arxiv: v1 [cs.cv] 13 Dec 2018") Frame u Frame t Frame s SIGNet: Semantic Instance Aided Unsupervised 3D Geometry Perception Yue Meng 1 Yongxi Lu 1 Aman Raj 1 Samuel Sunarjo 1 Rui Guo 2 Tara Javidi 1 Gaurav Bansal 2 Dinesh Bharadia 1
Frame u Frame t Frame s SIGNet: Semantic Instance Aided Unsupervised 3D Geometry Perception Yue Meng 1 Yongxi Lu 1 Aman Raj 1 Samuel Sunarjo 1 Rui Guo 2 Tara Javidi 1 Gaurav Bansal 2 Dinesh Bharadia 1
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
Optical Flow Estimation with CUDA. Mikhail Smirnov
 Optical Flow Estimation with CUDA Mikhail Smirnov msmirnov@nvidia.com Document Change History Version Date Responsible Reason for Change Mikhail Smirnov Initial release Abstract Optical flow is the apparent
Optical Flow Estimation with CUDA Mikhail Smirnov msmirnov@nvidia.com Document Change History Version Date Responsible Reason for Change Mikhail Smirnov Initial release Abstract Optical flow is the apparent
End-to-End Learning of Video Super-Resolution with Motion Compensation
 End-to-End Learning of Video Super-Resolution with Motion Compensation Osama Makansi, Eddy Ilg, and Thomas Brox Department of Computer Science, University of Freiburg Abstract. Learning approaches have
End-to-End Learning of Video Super-Resolution with Motion Compensation Osama Makansi, Eddy Ilg, and Thomas Brox Department of Computer Science, University of Freiburg Abstract. Learning approaches have
End-to-End Learning of Motion Representation for Video Understanding
 End-to-End Learning of Motion Representation for Video Understanding Lijie Fan 2, Wenbing Huang 1, Chuang Gan 3, Stefano Ermon 4, Boqing Gong 1, Junzhou Huang 1 1 Tencent AI Lab, 2 Tsinghua University,
End-to-End Learning of Motion Representation for Video Understanding Lijie Fan 2, Wenbing Huang 1, Chuang Gan 3, Stefano Ermon 4, Boqing Gong 1, Junzhou Huang 1 1 Tencent AI Lab, 2 Tsinghua University,
Discrete Optimization for Optical Flow
 Discrete Optimization for Optical Flow Moritz Menze 1, Christian Heipke 1, and Andreas Geiger 2 1 Leibniz Universität Hannover, Germany 2 Max Planck Institute for Intelligent Systems, Tübingen, Germany
Discrete Optimization for Optical Flow Moritz Menze 1, Christian Heipke 1, and Andreas Geiger 2 1 Leibniz Universität Hannover, Germany 2 Max Planck Institute for Intelligent Systems, Tübingen, Germany
Unsupervised Adaptation for Deep Stereo
 Unsupervised Adaptation for Deep Stereo Alessio Tonioni, Matteo Poggi, Stefano Mattoccia, Luigi Di Stefano University of Bologna, Department of Computer Science and Engineering (DISI) Viale del Risorgimento
Unsupervised Adaptation for Deep Stereo Alessio Tonioni, Matteo Poggi, Stefano Mattoccia, Luigi Di Stefano University of Bologna, Department of Computer Science and Engineering (DISI) Viale del Risorgimento
arxiv: v1 [cs.cv] 14 Dec 2016
![arxiv: v1 [cs.cv] 14 Dec 2016](/thumbs/88/115095109.jpg "arxiv: v1 [cs.cv] 14 Dec 2016") Detect, Replace, Refine: Deep Structured Prediction For Pixel Wise Labeling arxiv:1612.04770v1 [cs.cv] 14 Dec 2016 Spyros Gidaris University Paris-Est, LIGM Ecole des Ponts ParisTech spyros.gidaris@imagine.enpc.fr
Detect, Replace, Refine: Deep Structured Prediction For Pixel Wise Labeling arxiv:1612.04770v1 [cs.cv] 14 Dec 2016 Spyros Gidaris University Paris-Est, LIGM Ecole des Ponts ParisTech spyros.gidaris@imagine.enpc.fr
Fully Convolutional Network for Depth Estimation and Semantic Segmentation
 Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University