Undergrad HTAs / TAs. Help me make the course better! HTA deadline today (! sorry) TA deadline March 21 st, opens March 15th
|
|
|
- Aubrey Wilson
- 6 years ago
- Views:
Transcription
1
2 Undergrad HTAs / TAs Help me make the course better! HTA deadline today (! sorry) TA deadline March 2 st, opens March 5th

3 Project 2 Well done. Open ended parts, lots of opportunity for mistakes. Real implementation experience of a tricky vision system.


4 Episcopal Gaudi the haunted palace
5 Harder to mark Part 2 is somewhat open ended. Many of you came up with different solutions. -> We may have a few issues in the marking. Let us know if you think we ve made an error.
6 MATLAB tip - thresholding No need to iterate. img = im2double( imread( a.jpg ) ); imgt = img. double(img >.5);
7 Average Accuracy Across Notre Dame, Mt. Rushmore, and Gaudi s Episcopal Palace. 76% - Katya Schwiegershausen 2. 72% -Prasetya Utama % - Jessica Fu % Tiffany Chen 5. Gaudi s choice award: 34% - Spencer Boyum (st in Episcopal Palace)
8 Outline Recap camera calibration Epipolar Geometry
9 Oriented and Translated Camera R j w t k w O w i w
10 Degrees of freedom t x K R z y x t r r r t r r r t r r r v u s v u w z y x 5 6
11 How to calibrate the camera? Z Y s sv su t x K R
12 How do we calibrate a camera? su sv s Y Z
13 m m m m m m m m m m m m v Z v Y v v Z Y u Z u Y u u Z Y v Z v v Y v Z Y u Z u u Y u Z Y n n n n n n n n n n n n n n n n n n n n Method homogeneous linear system Solve for m s entries using linear least squares Ax= form Z Y m m m m m m m m m m m m s sv su [U, S, V] = svd(a); M = V(:,end); M = reshape(m,[],3)';
14 For project 3, we want the camera center
15 Estimate of camera center
16 Oriented and Translated Camera R j w t k w O w i w
17 Recovering the camera center Z Y s sv su t x K R z y x t r r r t r r r t r r r v u s v u w z y x This is not the camera center C. It is RC (because a point will be rotated before t x, t y, and t z are added) This is t K Q So K - m 4 is t So we need -R - K - m 4 to get C Q is K R. So we just need -Q - m 4
18 Estimate of camera center
19 Epipolar Geometry and Stereo Vision Many slides adapted from James Hays, Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, Hartley & Zisserman
 Disparity map D(x,y)")
=(x+d(x,y), y) If we could")

20 Depth from disparity image I(x,y) Disparity map D(x,y) image I (x,y ) (x,y )=(x+d(x,y), y) If we could find the corresponding points in two images, we could estimate relative depth James Hays
21 What do we need to know?. Calibration for the two cameras.. Camera projection matrix 2. Correspondence for every pixel. Like project 2, but project 2 is sparse. We need dense correspondence!


22 2. Correspondence for every pixel. Where do we need to search?
23 Depth from Stereo Goal: recover depth by finding image coordinate x that corresponds to x x x x z x' f f C Baseline C B
24 Depth from Stereo Goal: recover depth by finding image coordinate x that corresponds to x Sub-Problems. Calibration: How do we recover the relation of the cameras (if not already known)? 2. Correspondence: How do we search for the matching point x? x x'
25 Epipolar geometry Relates cameras from two positions
26 Wouldn t it be nice to know where matches can live? To constrain our 2d search to d?
27 Key idea: Epipolar constraint x x x x Potential matches for x have to lie on the corresponding line l. Potential matches for x have to lie on the corresponding line l.
28 VLFeat s 8 most confident matches among,+ local features.
29 Epipolar lines
30 Keep only the matches at are inliers with respect to the best fundamental matrix
31 Epipolar geometry: notation x x Baseline line connecting the two camera centers Epipoles = intersections of baseline with image planes = projections of the other camera center Epipolar Plane plane containing baseline (D family)
32 Epipolar geometry: notation x x Baseline line connecting the two camera centers Epipoles = intersections of baseline with image planes = projections of the other camera center Epipolar Plane plane containing baseline (D family) Epipolar Lines - intersections of epipolar plane with image planes (always come in corresponding pairs)
33 Think Pair Share Where are the epipoles? What do the epipolar lines look like? = camera center a) b) c) d)

34 Example: Converging cameras


35 Example: Motion parallel to image plane


36 Example: Forward motion e e Epipole has same coordinates in both images. Points move along lines radiating from e: Focus of expansion
37 What is this useful for? x x Find : If I know x, and have calibrated cameras (known intrinsics K,K and extrinsic relationship), I can restrict x to be along l. Discover disparity for stereo.
38 What is this useful for? x x Given candidate x, x correspondences, estimate relative position and orientation between the cameras and the 3D position of corresponding image points.
39 What is this useful for? x x Model fitting: see if candidate x, x correspondences fit estimated projection models of cameras and 2.
40 VLFeat s 8 most confident matches among,+ local features.
41 Epipolar lines
42 Keep only the matches at are inliers with respect to the best fundamental matrix
43 Epipolar constraint: Calibrated case x x x x xˆ K x Homogeneous 2d point (3D ray towards ) 2D pixel coordinate (homogeneous) 3D scene point xˆ K x 3D scene point in 2 nd camera s 3D coordinates
44 Epipolar constraint: Calibrated case x x x x t xˆ K Homogeneous 2d point (3D ray towards ) 2D pixel coordinate (homogeneous) x xˆ [ t 3D scene point ( Rxˆ )] (because x, R x, and t are co-planar) xˆ K x 3D scene point in 2 nd camera s 3D coordinates
45 Essential matrix x x xˆ [ t ( Rxˆ )] ˆ x T E xˆ with E t R E is a 3x3 matrix which relates corresponding pairs of normalized homogeneous image points across pairs of images for K calibrated cameras. Essential Matrix (Longuet-Higgins, 98) Estimates relative position/orientation. Note: [t] is matrix representation of cross product
46 Epipolar constraint: Uncalibrated case x x If we don t know K and K, then we can write the epipolar constraint in terms of unknown normalized coordinates: ˆ x T Ex ˆ x K xˆ, x Kx ˆ
47 The Fundamental Matrix Without knowing K and K, we can define a similar relation using unknown normalized coordinates xˆ T Ex ˆ T T xˆ K xˆ K x x x Fx with F K EK Fundamental Matrix (Faugeras and Luong, 992)
48 Properties of the Fundamental matrix x x x T Fx with F K EK T F x = is the epipolar line l associated with x F T x = is the epipolar line l associated with x F is singular (rank two): det(f)= F e = and F T e = (nullspaces of F = e ; nullspace of F T = e ) F has seven degrees of freedom: 9 entries but defined up to scale, det(f)=
49 F in more detail F is a 3x3 matrix Rank 2 -> projection; one column is a linear combination of the other two. Determined up to scale. 7 degrees of freedom a b αa + βb c d αc + βd e f αe + βf where a is scalar; e.g., can normalize out. Given x projected from into image, F constrains the projection of x into image 2 to an epipolar line.
50 Estimating the Fundamental Matrix 8-point algorithm Least squares solution using SVD on equations from 8 pairs of correspondences Enforce det(f)= constraint using SVD on F Note: estimation of F (or E) is degenerate for a planar scene.
51 8-point algorithm. Solve a system of homogeneous linear equations a. Write down the system of equations x T Fx uu f + uv f 2 + uf 3 + vu f 2 + vv f 22 + vf 23 + u f 3 + v f 32 + f 33 = Af = u u u v u v u v v v u v u n u v u n v n u n v n u n v n v n v n u n v n f f 2 f 3 f 2 f 33 =
52 8-point algorithm. Solve a system of homogeneous linear equations a. Write down the system of equations b. Solve f from Af= using SVD Matlab: [U, S, V] = svd(a); f = V(:, end); F = reshape(f, [3 3]) ;

53 Need to enforce singularity constraint
54 8-point algorithm. Solve a system of homogeneous linear equations a. Write down the system of equations b. Solve f from Af= using SVD Matlab: [U, S, V] = svd(a); f = V(:, end); F = reshape(f, [3 3]) ; 2. Resolve det(f) = constraint using SVD Matlab: [U, S, V] = svd(f); S(3,3) = ; F = USV ;
55 8-point algorithm. Solve a system of homogeneous linear equations a. Write down the system of equations b. Solve f from Af= using SVD 2. Resolve det(f) = constraint by SVD Notes: Use RANSAC to deal with outliers (sample 8 points) How to test for outliers?
56 Problem with eight-point algorithm f f f f f f f 2 uu uv u vu vv v u v f

57 Problem with eight-point algorithm f f f f f f f 2 uu uv u vu vv v u v Poor numerical conditioning Can be fixed by rescaling the data f
58 The normalized eight-point algorithm (Hartley, 995) Center the image data at the origin, and scale it so the mean squared distance between the origin and the data points is 2 pixels Use the eight-point algorithm to compute F from the normalized points Enforce the rank-2 constraint (for example, take SVD of F and throw out the smallest singular value) Transform fundamental matrix back to original units: if T and T are the normalizing transformations in the two images, than the fundamental matrix in original coordinates is T T F T

59 VLFeat s 8 most confident matches among,+ local features.

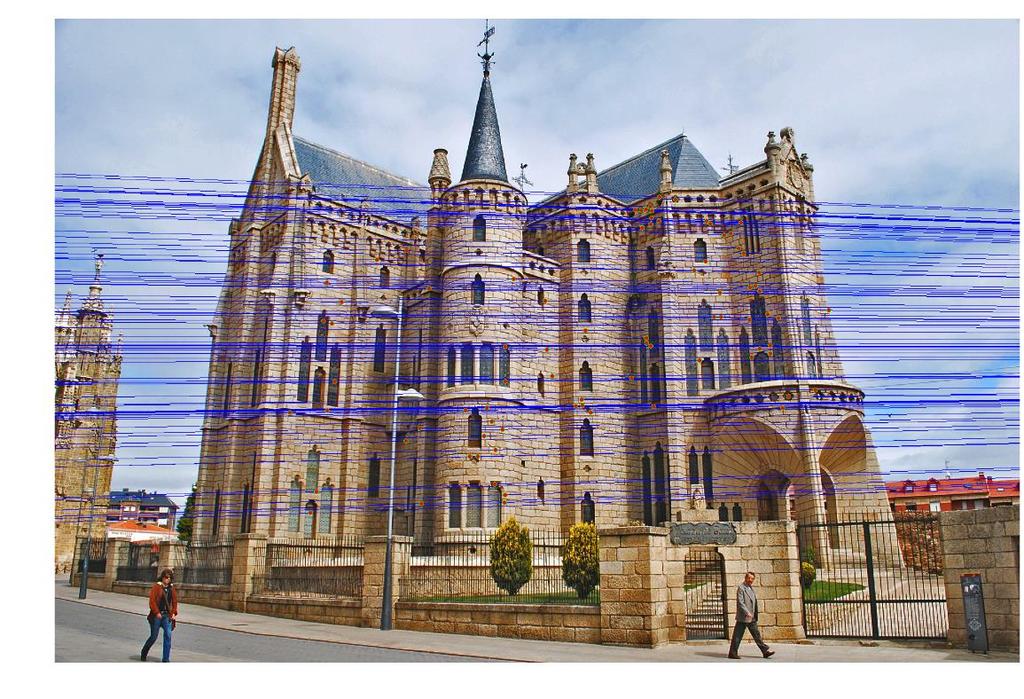
60 Epipolar lines

61 Keep only the matches at are inliers with respect to the best fundamental matrix

62 Comparison of estimation algorithms 8-point Normalized 8-point Nonlinear least squares Av. Dist pixels.92 pixel.86 pixel Av. Dist pixels.85 pixel.8 pixel
63 Let s recap Fundamental matrix song
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar geometry. x x
 Two-view geometry Epipolar geometry X x x Baseline line connecting the two camera centers Epipolar Plane plane containing baseline (1D family) Epipoles = intersections of baseline with image planes = projections
Two-view geometry Epipolar geometry X x x Baseline line connecting the two camera centers Epipolar Plane plane containing baseline (1D family) Epipoles = intersections of baseline with image planes = projections
Recovering structure from a single view Pinhole perspective projection
 EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
Multi-view geometry problems
 Multi-view geometry Multi-view geometry problems Structure: Given projections o the same 3D point in two or more images, compute the 3D coordinates o that point? Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera
Multi-view geometry Multi-view geometry problems Structure: Given projections o the same 3D point in two or more images, compute the 3D coordinates o that point? Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera
Structure from motion
 Multi-view geometry Structure rom motion Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera 3 R 3,t 3 Figure credit: Noah Snavely Structure rom motion? Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera 3 R 3,t 3 Structure:
Multi-view geometry Structure rom motion Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera 3 R 3,t 3 Figure credit: Noah Snavely Structure rom motion? Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera 3 R 3,t 3 Structure:
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Structure from Motion
 11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Lecture 5 Epipolar Geometry
 Lecture 5 Epipolar Geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 5-24-Jan-18 Lecture 5 Epipolar Geometry Why is stereo useful? Epipolar constraints Essential
Lecture 5 Epipolar Geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 5-24-Jan-18 Lecture 5 Epipolar Geometry Why is stereo useful? Epipolar constraints Essential
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Announcements. Stereo
 Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Reminder: Lecture 20: The Eight-Point Algorithm. Essential/Fundamental Matrix. E/F Matrix Summary. Computing F. Computing F from Point Matches
 Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Structure from Motion
 /8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
/8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Week 2: Two-View Geometry. Padua Summer 08 Frank Dellaert
 Week 2: Two-View Geometry Padua Summer 08 Frank Dellaert Mosaicking Outline 2D Transformation Hierarchy RANSAC Triangulation of 3D Points Cameras Triangulation via SVD Automatic Correspondence Essential
Week 2: Two-View Geometry Padua Summer 08 Frank Dellaert Mosaicking Outline 2D Transformation Hierarchy RANSAC Triangulation of 3D Points Cameras Triangulation via SVD Automatic Correspondence Essential
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Robust Geometry Estimation from two Images
 Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Last lecture. Passive Stereo Spacetime Stereo
 Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book)
") Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/,
Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/,
Computer Vision I. Announcement. Stereo Vision Outline. Stereo II. CSE252A Lecture 15
 Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Multiple View Geometry. Frank Dellaert
 Multiple View Geometry Frank Dellaert Outline Intro Camera Review Stereo triangulation Geometry of 2 views Essential Matrix Fundamental Matrix Estimating E/F from point-matches Why Consider Multiple Views?
Multiple View Geometry Frank Dellaert Outline Intro Camera Review Stereo triangulation Geometry of 2 views Essential Matrix Fundamental Matrix Estimating E/F from point-matches Why Consider Multiple Views?
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Fundamental Matrix & Structure from Motion
 Fundamental Matrix & Structure from Motion Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Transformations between images Structure from Motion The Essential Matrix The Fundamental
Fundamental Matrix & Structure from Motion Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Transformations between images Structure from Motion The Essential Matrix The Fundamental
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
C / 35. C18 Computer Vision. David Murray. dwm/courses/4cv.
 C18 2015 1 / 35 C18 Computer Vision David Murray david.murray@eng.ox.ac.uk www.robots.ox.ac.uk/ dwm/courses/4cv Michaelmas 2015 C18 2015 2 / 35 Computer Vision: This time... 1. Introduction; imaging geometry;
C18 2015 1 / 35 C18 Computer Vision David Murray david.murray@eng.ox.ac.uk www.robots.ox.ac.uk/ dwm/courses/4cv Michaelmas 2015 C18 2015 2 / 35 Computer Vision: This time... 1. Introduction; imaging geometry;
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15
 Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
CS231M Mobile Computer Vision Structure from motion
 CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
Epipolar geometry contd.
 Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Structure from Motion
 04/4/ Structure from Motion Comuter Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adated from Lana Lazebnik, Silvio Saverese, Steve Seitz his class: structure from motion Reca
04/4/ Structure from Motion Comuter Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adated from Lana Lazebnik, Silvio Saverese, Steve Seitz his class: structure from motion Reca
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Structure from Motion and Multi- view Geometry. Last lecture
 Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Structure from Motion
 Structure from Motion Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz, N Snavely, and D. Hoiem Administrative stuffs HW 3 due 11:55 PM, Oct 17 (Wed) Submit your alignment results!
Structure from Motion Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz, N Snavely, and D. Hoiem Administrative stuffs HW 3 due 11:55 PM, Oct 17 (Wed) Submit your alignment results!
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
3D Computer Vision. Structure from Motion. Prof. Didier Stricker
 3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
Structure from Motion
 Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
But First: Multi-View Projective Geometry
 View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
Computer Vision Lecture 20
 Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Two-View Geometry (Course 23, Lecture D)
") Two-View Geometry (Course 23, Lecture D) Jana Kosecka Department of Computer Science George Mason University http://www.cs.gmu.edu/~kosecka General Formulation Given two views of the scene recover the
Two-View Geometry (Course 23, Lecture D) Jana Kosecka Department of Computer Science George Mason University http://www.cs.gmu.edu/~kosecka General Formulation Given two views of the scene recover the
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Fundamental Matrix & Structure from Motion
 Fundamental Matrix & Structure from Motion Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Review of Assignment 0. Transformations between images Structure from Motion The Essential
Fundamental Matrix & Structure from Motion Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Review of Assignment 0. Transformations between images Structure from Motion The Essential
EECS 442: Final Project
 EECS 442: Final Project Structure From Motion Kevin Choi Robotics Ismail El Houcheimi Robotics Yih-Jye Jeffrey Hsu Robotics Abstract In this paper, we summarize the method, and results of our projective
EECS 442: Final Project Structure From Motion Kevin Choi Robotics Ismail El Houcheimi Robotics Yih-Jye Jeffrey Hsu Robotics Abstract In this paper, we summarize the method, and results of our projective
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
CS 664 Slides #9 Multi-Camera Geometry. Prof. Dan Huttenlocher Fall 2003
 CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Computer Vision I - Robust Geometry Estimation from two Cameras
 Computer Vision I - Robust Geometry Estimation from two Cameras Carsten Rother 16/01/2015 Computer Vision I: Image Formation Process FYI Computer Vision I: Image Formation Process 16/01/2015 2 Microsoft
Computer Vision I - Robust Geometry Estimation from two Cameras Carsten Rother 16/01/2015 Computer Vision I: Image Formation Process FYI Computer Vision I: Image Formation Process 16/01/2015 2 Microsoft
Vision par ordinateur
 Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
MAPI Computer Vision. Multiple View Geometry
 MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
3D Reconstruction from Two Views
 3D Reconstruction from Two Views Huy Bui UIUC huybui1@illinois.edu Yiyi Huang UIUC huang85@illinois.edu Abstract In this project, we study a method to reconstruct a 3D scene from two views. First, we extract
3D Reconstruction from Two Views Huy Bui UIUC huybui1@illinois.edu Yiyi Huang UIUC huang85@illinois.edu Abstract In this project, we study a method to reconstruct a 3D scene from two views. First, we extract
Multiple Views Geometry
 Multiple Views Geometry Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 2, 28 Epipolar geometry Fundamental geometric relationship between two perspective
Multiple Views Geometry Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 2, 28 Epipolar geometry Fundamental geometric relationship between two perspective
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Computer Vision I. Announcements. Random Dot Stereograms. Stereo III. CSE252A Lecture 16
 Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Depth from two cameras: stereopsis
 Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Computational Optical Imaging - Optique Numerique. -- Single and Multiple View Geometry, Stereo matching --
 Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Z (cm) Y (cm) X (cm)
 Y (cm) X (cm)") Oceans'98 IEEE/OES Conference Uncalibrated Vision for 3-D Underwater Applications K. Plakas, E. Trucco Computer Vision Group and Ocean Systems Laboratory Dept. of Computing and Electrical Engineering Heriot-Watt
Oceans'98 IEEE/OES Conference Uncalibrated Vision for 3-D Underwater Applications K. Plakas, E. Trucco Computer Vision Group and Ocean Systems Laboratory Dept. of Computing and Electrical Engineering Heriot-Watt
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
3D Photography: Epipolar geometry
 3D Photograph: Epipolar geometr Kalin Kolev, Marc Pollefes Spring 203 http://cvg.ethz.ch/teaching/203spring/3dphoto/ Schedule (tentative) Feb 8 Feb 25 Mar 4 Mar Mar 8 Mar 25 Apr Apr 8 Apr 5 Apr 22 Apr
3D Photograph: Epipolar geometr Kalin Kolev, Marc Pollefes Spring 203 http://cvg.ethz.ch/teaching/203spring/3dphoto/ Schedule (tentative) Feb 8 Feb 25 Mar 4 Mar Mar 8 Mar 25 Apr Apr 8 Apr 5 Apr 22 Apr
CS 1674: Intro to Computer Vision. Midterm Review. Prof. Adriana Kovashka University of Pittsburgh October 10, 2016
 CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
Depth from two cameras: stereopsis
 Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
1 (5 max) 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)
 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)") Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
3D FACE RECONSTRUCTION BASED ON EPIPOLAR GEOMETRY
 IJDW Volume 4 Number January-June 202 pp. 45-50 3D FACE RECONSRUCION BASED ON EPIPOLAR GEOMERY aher Khadhraoui, Faouzi Benzarti 2 and Hamid Amiri 3,2,3 Signal, Image Processing and Patterns Recognition
IJDW Volume 4 Number January-June 202 pp. 45-50 3D FACE RECONSRUCION BASED ON EPIPOLAR GEOMERY aher Khadhraoui, Faouzi Benzarti 2 and Hamid Amiri 3,2,3 Signal, Image Processing and Patterns Recognition
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Lecture'9'&'10:'' Stereo'Vision'
 Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera