Structure from Motion
|
|
|
- Mark Stewart
- 5 years ago
- Views:
Transcription
1 /8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert
2 This class: structure from motion Recap of epipolar geometry Depth from two views Affine structure from motion
3 Recap: Epipoles Point in left image corresponds to epipolar line l in right image Epipolar line passes through the epipole (the intersection of the cameras baseline with the image plane C C
4 Recap: Fundamental Matri Fundamental matri maps from a point in one image to a line in the other If and correspond to the same 3d point X:




5 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera Camera 2 Camera 3?? Slide credit: Noah Snavely
6 Structure from motion ambiguity If we scale the entire scene by some factor k and, at the same time, scale the camera matrices by the factor of /k, the projections of the scene points in the image remain eactly the same: PX k P( kx) It is impossible to recover the absolute scale of the scene!

7 How do we know the scale of image content?

8
9 Structure from motion ambiguity If we scale the entire scene by some factor k and, at the same time, scale the camera matrices by the factor of /k, the projections of the scene points in the image remain eactly the same More generally: if we transform the scene using a transformation Q and apply the inverse transformation to the camera matrices, then the images do not change PX PQ - QX
10 Projective structure from motion Given: m images of n fied 3D points ij = P i X j, i =,, m, j =,, n Problem: estimate m projection matrices P i and n 3D points X j from the mn corresponding points ij X j j 3j P 2j Slides from Lana Lazebnik P 2 P 3
11 Projective structure from motion Given: m images of n fied 3D points ij = P i X j, i =,, m, j =,, n Problem: estimate m projection matrices P i and n 3D points X j from the mn corresponding points ij With no calibration info, cameras and points can only be recovered up to a 44 projective transformation Q: X QX, P PQ - We can solve for structure and motion when 2mn >= m +3n 5 For two cameras, at least 7 points are needed

12 Types of ambiguity Projective 5dof A T v t v Preserves intersection and tangency Affine 2dof A T 0 t Preserves parallellism, volume ratios Similarity 7dof s R T 0 t Preserves angles, ratios of length Euclidean 6dof R T 0 t Preserves angles, lengths With no constraints on the camera calibration matri or on the scene, we get a projective reconstruction Need additional information to upgrade the reconstruction to affine, similarity, or Euclidean
13 Projective ambiguity Q p A T v t v PX PQ - Q X P P

14 Projective ambiguity
15 Affine ambiguity Affine Q A A T 0 t PX PQ - Q X A A

16 Affine ambiguity
17 Similarity ambiguity Q s sr T 0 t PX PQ -Q X S S
18 Similarity ambiguity
19 Bundle adjustment Non-linear method for refining structure and motion Minimizing reprojection error m E( P, X) D n i j 2, P X ij i j X j P X j j 3j P P 2 X j 2j P 3 X j P 2 P 3

20 Photo synth Noah Snavely, Steven M. Seitz, Richard Szeliski, "Photo tourism: Eploring photo collections in 3D," SIGGRAPH

 center at")
21 Structure from motion Let s start with affine cameras (the math is easier) center at infinity
22 Affine structure from motion Affine projection is a linear mapping + translation in inhomogeneous coordinates y a a 2 a a 2 22 a a 3 23 X t Y t Z y AX t a 2 a X Projection of world origin. We are given corresponding 2D points () in several frames 2. We want to estimate the 3D points (X) and the affine parameters of each camera (A)
23 Affine structure from motion Centering: subtract the centroid of the image points For simplicity, assume that the origin of the world coordinate system is at the centroid of the 3D points After centering, each normalized point ij is related to the 3D point X i by j i n k k j i n k i k i i j i n k ik ij ij n n n A X X X A b A X b A X j i ij X A
24 Suppose we know 3D points and affine camera parameters then, we can compute the observed 2d positions of each point mn m m n n n m X X X A A A Camera Parameters (2m3) 3D Points (3n) 2D Image Points (2mn)
25 What if we instead observe corresponding 2d image points? Can we recover the camera parameters and 3d points? cameras (2 m) points (n) n m mn m m n n X X X A A A D ? What rank is the matri of 2D points?

26 Factorizing the measurement matri AX Source: M. Hebert
27 Factorizing the measurement matri Singular value decomposition of D: Source: M. Hebert

28 Factorizing the measurement matri Singular value decomposition of D: Source: M. Hebert
29 Factorizing the measurement matri Obtaining a factorization from SVD: Source: M. Hebert

30 Factorizing the measurement matri Obtaining a factorization from SVD: This decomposition minimizes D-MS 2 Source: M. Hebert

31 Affine ambiguity A ~ X ~ S The decomposition is not unique. We get the same D by using any 3 3 matri C and applying the transformations A AC, X C - X That is because we have only an affine transformation and we have not enforced any Euclidean constraints (like forcing the image aes to be perpendicular, for eample) Source: M. Hebert
32 Eliminating the affine ambiguity Orthographic: image aes are perpendicular and scale is a a 2 = 0 a 2 a a 2 = a 2 2 = X This translates into 3m equations in L = CC T : A i L A T i = Id, i =,, m Solve for L Recover C from L by Cholesky decomposition: L = CC T Update M and S: M = MC, S = C - S Source: M. Hebert
33 Algorithm summary Given: m images and n tracked features ij For each image i, center the feature coordinates Construct a 2m n measurement matri D: Column j contains the projection of point j in all views Row i contains one coordinate of the projections of all the n points in image i Factorize D: Compute SVD: D = U W V T Create U 3 by taking the first 3 columns of U Create V 3 by taking the first 3 columns of V Create W 3 by taking the upper left 3 3 block of W Create the motion (affine) and shape (3D) matrices: A = U 3 W 3 ½ and X = W 3 ½ V 3 T Eliminate affine ambiguity Source: M. Hebert

34 Dealing with missing data So far, we have assumed that all points are visible in all views In reality, the measurement matri typically looks something like this: cameras points One solution: solve using a dense submatri of visible points Iteratively add new cameras
35 A nice short eplanation Class notes from Lischinksi and Gruber
Structure from Motion
 11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
Structure from Motion CSC 767
 Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Structure from Motion
 04/4/ Structure from Motion Comuter Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adated from Lana Lazebnik, Silvio Saverese, Steve Seitz his class: structure from motion Reca
04/4/ Structure from Motion Comuter Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adated from Lana Lazebnik, Silvio Saverese, Steve Seitz his class: structure from motion Reca
C280, Computer Vision
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
Structure from Motion
 Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 4 Affine Structure from Motion Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 4 Affine Structure from Motion Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D, Newmark Civil Engineering
Structure from Motion
 Structure from Motion Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz, N Snavely, and D. Hoiem Administrative stuffs HW 3 due 11:55 PM, Oct 17 (Wed) Submit your alignment results!
Structure from Motion Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz, N Snavely, and D. Hoiem Administrative stuffs HW 3 due 11:55 PM, Oct 17 (Wed) Submit your alignment results!
CS231M Mobile Computer Vision Structure from motion
 CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
CS 532: 3D Computer Vision 7 th Set of Notes
 1 CS 532: 3D Computer Vision 7 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Logistics No class on October
1 CS 532: 3D Computer Vision 7 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Logistics No class on October
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15
 Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Recovering structure from a single view Pinhole perspective projection
 EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Undergrad HTAs / TAs. Help me make the course better! HTA deadline today (! sorry) TA deadline March 21 st, opens March 15th
 TA deadline March 21 st, opens March 15th") Undergrad HTAs / TAs Help me make the course better! HTA deadline today (! sorry) TA deadline March 2 st, opens March 5th Project 2 Well done. Open ended parts, lots of opportunity for mistakes. Real implementation
Undergrad HTAs / TAs Help me make the course better! HTA deadline today (! sorry) TA deadline March 2 st, opens March 5th Project 2 Well done. Open ended parts, lots of opportunity for mistakes. Real implementation
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Lecture 5 Epipolar Geometry
 Lecture 5 Epipolar Geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 5-24-Jan-18 Lecture 5 Epipolar Geometry Why is stereo useful? Epipolar constraints Essential
Lecture 5 Epipolar Geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 5-24-Jan-18 Lecture 5 Epipolar Geometry Why is stereo useful? Epipolar constraints Essential
Multiple Views Geometry
 Multiple Views Geometry Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 2, 28 Epipolar geometry Fundamental geometric relationship between two perspective
Multiple Views Geometry Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 2, 28 Epipolar geometry Fundamental geometric relationship between two perspective
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Epipolar Geometry for General Cameras. Sanja Fidler CSC420: Intro to Image Understanding 1 / 33
 Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
CS 664 Structure and Motion. Daniel Huttenlocher
 CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
CS231A Course Notes 4: Stereo Systems and Structure from Motion
 CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
Projective geometry for 3D Computer Vision
 Subhashis Banerjee Computer Science and Engineering IIT Delhi Dec 16, 2015 Overview Pin-hole camera Why projective geometry? Reconstruction Computer vision geometry: main problems Correspondence problem:
Subhashis Banerjee Computer Science and Engineering IIT Delhi Dec 16, 2015 Overview Pin-hole camera Why projective geometry? Reconstruction Computer vision geometry: main problems Correspondence problem:
Multiple View Geometry in Computer Vision
 Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Structure Computation Lecture 18 March 22, 2005 2 3D Reconstruction The goal of 3D reconstruction
Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Structure Computation Lecture 18 March 22, 2005 2 3D Reconstruction The goal of 3D reconstruction
Epipolar geometry. x x
 Two-view geometry Epipolar geometry X x x Baseline line connecting the two camera centers Epipolar Plane plane containing baseline (1D family) Epipoles = intersections of baseline with image planes = projections
Two-view geometry Epipolar geometry X x x Baseline line connecting the two camera centers Epipolar Plane plane containing baseline (1D family) Epipoles = intersections of baseline with image planes = projections
Metric Structure from Motion
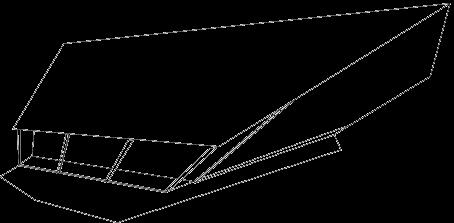
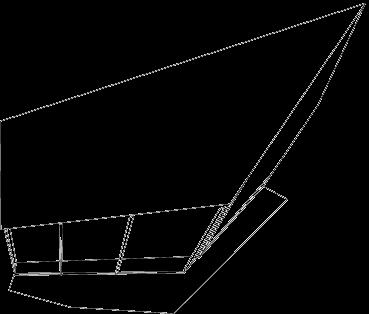
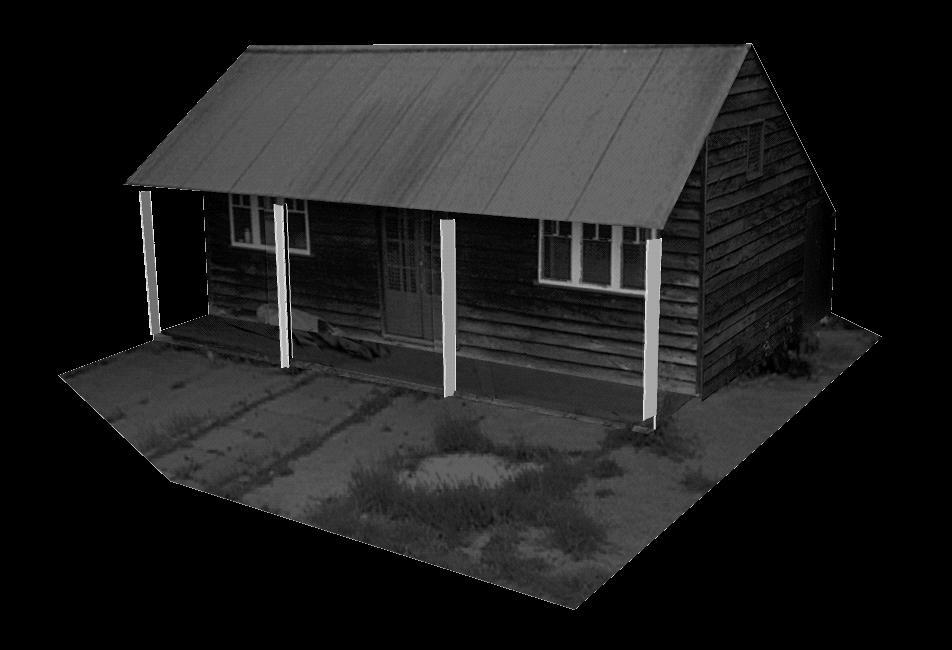
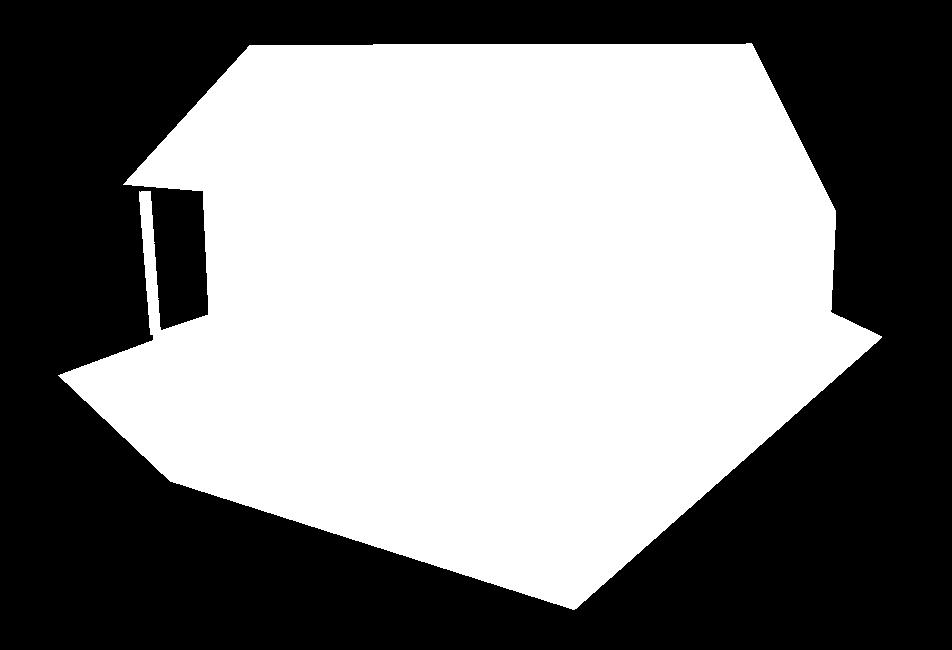
 CS443 Final Project Metric Structure from Motion Peng Cheng 1 Objective of the Project Given: 1. A static object with n feature points and unknown shape. 2. A camera with unknown intrinsic parameters takes
CS443 Final Project Metric Structure from Motion Peng Cheng 1 Objective of the Project Given: 1. A static object with n feature points and unknown shape. 2. A camera with unknown intrinsic parameters takes
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Last lecture. Passive Stereo Spacetime Stereo
 Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Reminder: Lecture 20: The Eight-Point Algorithm. Essential/Fundamental Matrix. E/F Matrix Summary. Computing F. Computing F from Point Matches
 Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
The end of affine cameras
 The end of affine cameras Affine SFM revisited Epipolar geometry Two-view structure from motion Multi-view structure from motion Planches : http://www.di.ens.fr/~ponce/geomvis/lect3.pptx http://www.di.ens.fr/~ponce/geomvis/lect3.pdf
The end of affine cameras Affine SFM revisited Epipolar geometry Two-view structure from motion Multi-view structure from motion Planches : http://www.di.ens.fr/~ponce/geomvis/lect3.pptx http://www.di.ens.fr/~ponce/geomvis/lect3.pdf
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Multi-view geometry problems
 Multi-view geometry Multi-view geometry problems Structure: Given projections o the same 3D point in two or more images, compute the 3D coordinates o that point? Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera
Multi-view geometry Multi-view geometry problems Structure: Given projections o the same 3D point in two or more images, compute the 3D coordinates o that point? Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
3D reconstruction class 11
 3D reconstruction class 11 Multiple View Geometry Comp 290-089 Marc Pollefeys Multiple View Geometry course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective 2D Geometry Jan. 14, 16
3D reconstruction class 11 Multiple View Geometry Comp 290-089 Marc Pollefeys Multiple View Geometry course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective 2D Geometry Jan. 14, 16
Part I: Single and Two View Geometry Internal camera parameters
 !! 43 1!???? Imaging eometry Multiple View eometry Perspective projection Richard Hartley Andrew isserman O p y VPR June 1999 where image plane This can be written as a linear mapping between homogeneous
!! 43 1!???? Imaging eometry Multiple View eometry Perspective projection Richard Hartley Andrew isserman O p y VPR June 1999 where image plane This can be written as a linear mapping between homogeneous
Structure from motion
 Multi-view geometry Structure rom motion Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera 3 R 3,t 3 Figure credit: Noah Snavely Structure rom motion? Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera 3 R 3,t 3 Structure:
Multi-view geometry Structure rom motion Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera 3 R 3,t 3 Figure credit: Noah Snavely Structure rom motion? Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera 3 R 3,t 3 Structure:
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
CS 1674: Intro to Computer Vision. Midterm Review. Prof. Adriana Kovashka University of Pittsburgh October 10, 2016
 CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
CS 231A: Computer Vision (Winter 2018) Problem Set 2
 Problem Set 2") CS 231A: Computer Vision (Winter 2018) Problem Set 2 Due Date: Feb 09 2018, 11:59pm Note: In this PS, using python2 is recommended, as the data files are dumped with python2. Using python3 might cause
CS 231A: Computer Vision (Winter 2018) Problem Set 2 Due Date: Feb 09 2018, 11:59pm Note: In this PS, using python2 is recommended, as the data files are dumped with python2. Using python3 might cause
Computer Vision Lecture 20
 Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
3D Reconstruction from Two Views
 3D Reconstruction from Two Views Huy Bui UIUC huybui1@illinois.edu Yiyi Huang UIUC huang85@illinois.edu Abstract In this project, we study a method to reconstruct a 3D scene from two views. First, we extract
3D Reconstruction from Two Views Huy Bui UIUC huybui1@illinois.edu Yiyi Huang UIUC huang85@illinois.edu Abstract In this project, we study a method to reconstruct a 3D scene from two views. First, we extract
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
But First: Multi-View Projective Geometry
 View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Epipolar Geometry and the Essential Matrix
 Epipolar Geometry and the Essential Matrix Carlo Tomasi The epipolar geometry of a pair of cameras expresses the fundamental relationship between any two corresponding points in the two image planes, and
Epipolar Geometry and the Essential Matrix Carlo Tomasi The epipolar geometry of a pair of cameras expresses the fundamental relationship between any two corresponding points in the two image planes, and
Two-View Geometry (Course 23, Lecture D)
") Two-View Geometry (Course 23, Lecture D) Jana Kosecka Department of Computer Science George Mason University http://www.cs.gmu.edu/~kosecka General Formulation Given two views of the scene recover the
Two-View Geometry (Course 23, Lecture D) Jana Kosecka Department of Computer Science George Mason University http://www.cs.gmu.edu/~kosecka General Formulation Given two views of the scene recover the
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Transformations Between Two Images. Translation Rotation Rigid Similarity (scaled rotation) Affine Projective Pseudo Perspective Bi linear
 Affine Projective Pseudo Perspective Bi linear") Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear Fundamental Matri Lecture 13 pplications Stereo Structure from Motion
Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear Fundamental Matri Lecture 13 pplications Stereo Structure from Motion
Invariance of l and the Conic Dual to Circular Points C
 Invariance of l and the Conic Dual to Circular Points C [ ] A t l = (0, 0, 1) is preserved under H = v iff H is an affinity: w [ ] l H l H A l l v 0 [ t 0 v! = = w w] 0 0 v = 0 1 1 C = diag(1, 1, 0) is
Invariance of l and the Conic Dual to Circular Points C [ ] A t l = (0, 0, 1) is preserved under H = v iff H is an affinity: w [ ] l H l H A l l v 0 [ t 0 v! = = w w] 0 0 v = 0 1 1 C = diag(1, 1, 0) is
Fundamental Matrix. Lecture 13
 Fundamental Matri Lecture 13 Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear pplications Stereo Structure from Motion
Fundamental Matri Lecture 13 Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear pplications Stereo Structure from Motion
Computer Vision Lecture 18
 Course Outline Computer Vision Lecture 8 Motion and Optical Flow.0.009 Bastian Leibe RWTH Aachen http://www.umic.rwth-aachen.de/multimedia leibe@umic.rwth-aachen.de Man slides adapted from K. Grauman,
Course Outline Computer Vision Lecture 8 Motion and Optical Flow.0.009 Bastian Leibe RWTH Aachen http://www.umic.rwth-aachen.de/multimedia leibe@umic.rwth-aachen.de Man slides adapted from K. Grauman,
Geometry for Computer Vision
 Geometry for Computer Vision Lecture 5b Calibrated Multi View Geometry Per-Erik Forssén 1 Overview The 5-point Algorithm Structure from Motion Bundle Adjustment 2 Planar degeneracy In the uncalibrated
Geometry for Computer Vision Lecture 5b Calibrated Multi View Geometry Per-Erik Forssén 1 Overview The 5-point Algorithm Structure from Motion Bundle Adjustment 2 Planar degeneracy In the uncalibrated
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Structure from Motion and Multi- view Geometry. Last lecture
 Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Camera models and calibration
 Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
A Factorization Method for Structure from Planar Motion
 A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Projective 2D Geometry
 Projective D Geometry Multi View Geometry (Spring '08) Projective D Geometry Prof. Kyoung Mu Lee SoEECS, Seoul National University Homogeneous representation of lines and points Projective D Geometry Line
Projective D Geometry Multi View Geometry (Spring '08) Projective D Geometry Prof. Kyoung Mu Lee SoEECS, Seoul National University Homogeneous representation of lines and points Projective D Geometry Line
CS 231A Computer Vision (Winter 2015) Problem Set 2
 Problem Set 2") CS 231A Computer Vision (Winter 2015) Problem Set 2 Due Feb 9 th 2015 11:59pm 1 Fundamental Matrix (20 points) In this question, you will explore some properties of fundamental matrix and derive a minimal
CS 231A Computer Vision (Winter 2015) Problem Set 2 Due Feb 9 th 2015 11:59pm 1 Fundamental Matrix (20 points) In this question, you will explore some properties of fundamental matrix and derive a minimal
Augmented Reality II - Camera Calibration - Gudrun Klinker May 11, 2004
 Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 8: Geometric transformations Szeliski: Chapter 3.6 Reading Announcements Project 2 out today, due Oct. 4 (demo at end of class today) Image alignment Why don
CS467: Computer Vision Noah Snavely Lecture 8: Geometric transformations Szeliski: Chapter 3.6 Reading Announcements Project 2 out today, due Oct. 4 (demo at end of class today) Image alignment Why don
Computer Vision. 2. Projective Geometry in 3D. Lars Schmidt-Thieme
 Computer Vision 2. Projective Geometry in 3D Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Computer Science University of Hildesheim, Germany 1 / 26 Syllabus Mon.
Computer Vision 2. Projective Geometry in 3D Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Computer Science University of Hildesheim, Germany 1 / 26 Syllabus Mon.
Fundamental Matrix & Structure from Motion
 Fundamental Matrix & Structure from Motion Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Transformations between images Structure from Motion The Essential Matrix The Fundamental
Fundamental Matrix & Structure from Motion Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Transformations between images Structure from Motion The Essential Matrix The Fundamental
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will