04 - Normal Estimation, Curves
|
|
|
- Daniella Douglas
- 5 years ago
- Views:
Transcription
1 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung
2 Normal Estimation


3 Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
4 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
5 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
6 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
7 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
8 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
9 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
10 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
11 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
12 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
13 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
14 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
15 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
16 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
17 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
18 Normal Estimation Assign a normal vector n at each point cloud point x Estimate the direction by fitting a local plane Find consistent global orientation by propagation (spanning tree)
19 Local Plane Fitting For each point x in the cloud, pick k nearest neighbors or all points in r-ball: Find a plane Π that minimizes the sum of square distances:


20 Local Plane Fitting For each point x in the cloud, pick k nearest neighbors or all points in r-ball: Find a plane Π that minimizes the sum of square distances:
21 Linear Least Squares? y x
22 Linear Least Squares? Find a line y = ax+b s.t. y x But we would like true orthogonal distances!
23 Best Fit with SSD y yʹ xʹ x SSD = sum of squared distances (or differences)
24 Principle Component Analysis (PCA) PCA finds an orthogonal basis that best represents a given data set y yʹ xʹ z x x y PCA finds the best approximating line/plane/orientation (in terms of Σdistances 2 )
25 Notations Input points: Looking for a (hyper) plane passing through c with normal n s.t.
26 Notations Input points: Centroid: m Vectors from the centroid:
27 Centroid: 0-dim Approximation It can be shown that: m m minimizes SSD m will be the origin of the (hyper)-plane Our problem becomes:
28 Hyperplane Normal Minimize!
29 Hyperplane Normal Minimize!
30 Hyperplane Normal Constrained minimization Lagrange multipliers Matrix Cookbook!
31 Hyperplane Normal Constrained minimization Lagrange multipliers
32 Hyperplane Normal Constrained minimization Lagrange multipliers What can be said about n??
33 Hyperplane Normal Constrained minimization Lagrange multipliers n is the eigenvector of S with the smallest eigenvalue
34 Summary Best Fitting Plane Recipe Input: Compute centroid = plane origin Compute scatter matrix The plane normal n is the eigenvector of S with the smallest eigenvalue
35 What does the Scatter Matrix do? Let s look at a line l through the center of mass m with direction vector v, and project our points x i onto it. The variance of the projected points xʹi is: x i y i l m v xʹi l l l l Original set Small variance Large variance
36 What does the Scatter Matrix do? The scatter matrix measures the variance of our data points along the direction v x i y i l m v xʹi l l l l Original set Small variance Large variance
37 Principal Components Eigenvectors of S that correspond to big eigenvalues are the directions in which the data has strong components (= large variance). If the eigenvalues are more or less the same there is no preferable direction.
38 Principal Components There s no preferable direction S looks like this: There s a clear preferable direction S looks like this: Any vector is an eigenvector µ is close to zero, much smaller than λ
39 Normal Orientation PCA may return arbitrarily oriented eigenvectors Wish to orient consistently Neighboring points should have similar normals
40 Normal Orientation Build graph connecting neighboring points Edge (i,j) exists if xi knn(xj) or xj knn(xi) Propagate normal orientation through graph For neighbors xi, xj : Flip nj if ni T nj < 0 Fails at sharp edges/corners Propagate along safe paths (parallel tangent planes) Minimum spanning tree with angle-based edge weights Surface reconstruction from unorganized points, Hoppe et al., SIGGRAPH
41 Elementary Differential Geometry


42 Differential Geometry Motivation Describe and analyze geometric characteristics of shapes e.g. how smooth?






43 Differential Geometry Motivation Describe and analyze geometric characteristics of shapes e.g. how smooth? how shapes deform
44 Differential Geometry Basics Geometry of manifolds Things that can be discovered by local observation: point + neighborhood
45 Differential Geometry Basics Geometry of manifolds Things that can be discovered by local observation: point + neighborhood manifold point
46 Differential Geometry Basics Geometry of manifolds Things that can be discovered by local observation: point + neighborhood manifold point
47 Differential Geometry Basics Geometry of manifolds Things that can be discovered by local observation: point + neighborhood continuous 1-1 mapping manifold point
48 Differential Geometry Basics Geometry of manifolds Things that can be discovered by local observation: point + neighborhood manifold point continuous 1-1 mapping non-manifold point
49 Differential Geometry Basics Geometry of manifolds Things that can be discovered by local observation: point + neighborhood manifold point continuous 1-1 mapping non-manifold point x
50 Differential Geometry Basics Geometry of manifolds Things that can be discovered by local observation: point + neighborhood
51 Differential Geometry Basics Geometry of manifolds Things that can be discovered by local observation: point + neighborhood continuous 1-1 mapping
52 Differential Geometry Basics Geometry of manifolds Things that can be discovered by local observation: point + neighborhood v continuous 1-1 mapping u If a sufficiently smooth mapping can be constructed, we can look at its first and second derivatives Tangents, normals, curvatures, curve angles Distances, topology
53 Curves
 or GFDL (http://www.gnu.org/copyleft/fdl.")
54 How do we model shapes? Delcam Plc. [CC BY-SA 3.0 ( or GFDL ( via Wikimedia Commons


55 Building blocks: curves and surfaces By Wojciech mula at Polish Wikipedia, CC BY-SA 3.0,
56 A modeling session Demo with Keynote for 2D Demo with Blender for 3D
57 Modeling curves We need mathematical concepts to characterize the desired curve properties Notions from curve geometry help with designing user interfaces for curve creation and editing
58 2D parametric curve must be continuous

59 A curve can be parameterized in many different ways
60 Tangent vector Parametrization-independent!
61 Arc length How long is the curve between and? How far does the particle travel? Speed is, so: Speed is nonnegative, so is non-decreasing
62 Arc length parameterization Every curve has a natural parameterization:
63 Arc length parameterization Every curve has a natural parameterization: Isometry between parameter domain and curve Tangent vector is unit-length:
64 Curvature How much does the curve turn per unit?
65 Curvature How much does the curve turn per unit?
66 Curvature profile Given, we can get up to a constant by integration. Integrating reconstructs the curve up to rigid motion.



67 Curvature of a circle Curvature of a circle: = Unit Normal Osculating circle
68 Frenet Frame

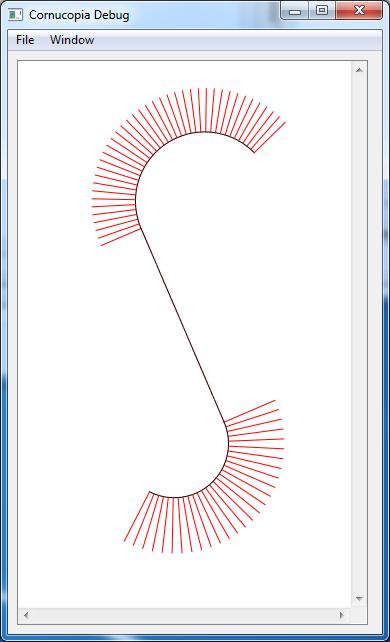
69 Curvature normal Points inward useful for evaluating curve quality


70 Smoothness Two kinds, parametric and geometric: Parametrization-Independent
71 Smoothness example
72 Recap on parametric curves



73 Turning Angle from start tangent to end tangent: If curve is closed, the tangent at the beginning is the same as the tangent at the end
74 Turning numbers measures how many full turns the tangent makes.
75 Gauss map Point on curve maps to point on unit circle.

76 Space curves (3D) In 3D, many vectors are orthogonal to T B are the Frenet frame N is torsion: non-planarity T
77 Discrete Differential Geometry of Curves Some references: see
78 Discrete Planar Curves
79 Discrete Planar Curves Piecewise linear curves Not smooth at vertices Can t take derivatives Generalize notions from the smooth world for the discrete case! There is no one single way
80 Tangents, Normals For any point on the edge, the tangent is simply the unit vector along the edge and the normal is the perpendicular vector
81 Tangents, Normals For vertices, we have many options
82 Tangents, Normals Can choose to average the adjacent edge normals
83 Tangents, Normals Weight by edge lengths
84 Inscribed Polygon, p Connection between discrete and smooth Finite number of vertices each lying on the curve, connected by straight edges.
85 The Length of a Discrete Curve Sum of edge lengths p 2 p 3 p 4 p 1

86 The Length of a Continuous Curve Take limit over a refinement sequence h = max edge length
87 Curvature of a Discrete Curve Curvature is the change in normal direction as we travel along the curve no change along each edge curvature is zero along edges
88 Curvature of a Discrete Curve Curvature is the change in normal direction as we travel along the curve normal changes at vertices record the turning angle!
89 Curvature of a Discrete Curve Curvature is the change in normal direction as we travel along the curve normal changes at vertices record the turning angle!
90 Curvature of a Discrete Curve Curvature is the change in normal direction as we travel along the curve same as the turning angle between the edges
91 Curvature of a Discrete Curve Zero along the edges Turning angle at the vertices = the change in normal direction α 1 α 2 α 1, α 2 > 0, α 3 < 0 α 3
92 Total Signed Curvature α 1 α 2 Sum of turning angles α 3
93 Discrete Gauss Map Edges map to points, vertices map to arcs.
94 Discrete Gauss Map Turning number well-defined for discrete curves.
95 Discrete Turning Number Theorem For a closed curve, the total signed curvature is an integer multiple of 2π. proof: sum of exterior angles

96 Turning Number Theorem Continuous world Discrete world k:
97 Curvature is scale dependent is scale-independent
98 Discrete Curvature Integrated Quantity! Cannot view α i as pointwise curvature α 1 α 2 It is integrated curvature over a local area associated with vertex i
99 Discrete Curvature Integrated Quantity! Integrated over a local area associated with vertex i α 1 α 2 A 1
100 Discrete Curvature Integrated Quantity! Integrated over a local area associated with vertex i α 1 α 2 A 1 A 2
101 Discrete Curvature Integrated Quantity! Integrated over a local area associated with vertex i α 1 α 2 A 1 A 2 The vertex areas A i form a covering of the curve. They are pairwise disjoint (except endpoints).
102 Structure Preservation Arbitrary discrete curve discrete analogue of continuous theorem total signed curvature obeys discrete turning number theorem even coarse mesh (curve) which continuous theorems to preserve? that depends on the application
103 Convergence Consider refinement sequence length of inscribed polygon approaches length of smooth curve in general, discrete measure approaches continuous analogue which refinement sequence? depends on discrete operator pathological sequences may exist in what sense does the operator converge? (pointwise, L 2 ; linear, quadratic)
104 Recap Structure- preservation Convergence For an arbitrary (even coarse) discrete curve, the discrete measure of curvature obeys the discrete turning number theorem. In the limit of a refinement sequence, discrete measures of length and curvature agree with continuous measures.
105 Thank you
Shape Modeling. Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell. CS 523: Computer Graphics, Spring 2011
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
05 - Surfaces. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Daniele Panozzo
 05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
Digital Geometry Processing
 Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Surface Reconstruction. Gianpaolo Palma
 Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Discrete Differential Geometry: An Applied Introduction
 Discrete Differential Geometry: An Applied Introduction Eitan Grinspun with Mathieu Desbrun, Konrad Polthier, Peter Schröder, & Ari Stern 1 Differential Geometry Why do we care? geometry of surfaces Springborn
Discrete Differential Geometry: An Applied Introduction Eitan Grinspun with Mathieu Desbrun, Konrad Polthier, Peter Schröder, & Ari Stern 1 Differential Geometry Why do we care? geometry of surfaces Springborn
(Discrete) Differential Geometry
 Differential Geometry") (Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
(Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
Geometric Modeling in Graphics
 Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Distance Functions 1
 Distance Functions 1 Distance function Given: geometric object F (curve, surface, solid, ) Assigns to each point the shortest distance from F Level sets of the distance function are trimmed offsets F p
Distance Functions 1 Distance function Given: geometric object F (curve, surface, solid, ) Assigns to each point the shortest distance from F Level sets of the distance function are trimmed offsets F p
CS 523: Computer Graphics, Spring Differential Geometry of Surfaces
 CS 523: Computer Graphics, Spring 2009 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2009 3/4/2009 Recap Differential Geometry of Curves Andrew Nealen, Rutgers, 2009 3/4/2009
CS 523: Computer Graphics, Spring 2009 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2009 3/4/2009 Recap Differential Geometry of Curves Andrew Nealen, Rutgers, 2009 3/4/2009
Let and be a differentiable function. Let Then be the level surface given by
 Module 12 : Total differential, Tangent planes and normals Lecture 35 : Tangent plane and normal [Section 35.1] > Objectives In this section you will learn the following : The notion tangent plane to a
Module 12 : Total differential, Tangent planes and normals Lecture 35 : Tangent plane and normal [Section 35.1] > Objectives In this section you will learn the following : The notion tangent plane to a
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Let be a function. We say, is a plane curve given by the. Let a curve be given by function where is differentiable with continuous.
 Module 8 : Applications of Integration - II Lecture 22 : Arc Length of a Plane Curve [Section 221] Objectives In this section you will learn the following : How to find the length of a plane curve 221
Module 8 : Applications of Integration - II Lecture 22 : Arc Length of a Plane Curve [Section 221] Objectives In this section you will learn the following : How to find the length of a plane curve 221
Surface Parameterization
 Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Motivation. Parametric Curves (later Surfaces) Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)
 Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)") Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Justin Solomon MIT, Spring 2017
 http://www.alvinomassage.com/images/knot.jpg Justin Solomon MIT, Spring 2017 Some materials from Stanford CS 468, spring 2013 (Butscher & Solomon) What is a curve? A function? Not a curve Jams on accelerator
http://www.alvinomassage.com/images/knot.jpg Justin Solomon MIT, Spring 2017 Some materials from Stanford CS 468, spring 2013 (Butscher & Solomon) What is a curve? A function? Not a curve Jams on accelerator
Geometric modeling 1
 Geometric Modeling 1 Look around the room. To make a 3D model of a room requires modeling every single object you can see. Leaving out smaller objects (clutter) makes the room seem sterile and unrealistic
Geometric Modeling 1 Look around the room. To make a 3D model of a room requires modeling every single object you can see. Leaving out smaller objects (clutter) makes the room seem sterile and unrealistic
Surface Reconstruction from Unorganized Points
 Survey of Methods in Computer Graphics: Surface Reconstruction from Unorganized Points H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, W. Stuetzle SIGGRAPH 1992. Article and Additional Material at: http://research.microsoft.com/en-us/um/people/hoppe/proj/recon/
Survey of Methods in Computer Graphics: Surface Reconstruction from Unorganized Points H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, W. Stuetzle SIGGRAPH 1992. Article and Additional Material at: http://research.microsoft.com/en-us/um/people/hoppe/proj/recon/
Fast marching methods
 1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
Background for Surface Integration
 Background for urface Integration 1 urface Integrals We have seen in previous work how to define and compute line integrals in R 2. You should remember the basic surface integrals that we will need to
Background for urface Integration 1 urface Integrals We have seen in previous work how to define and compute line integrals in R 2. You should remember the basic surface integrals that we will need to
Mathematically, the path or the trajectory of a particle moving in space in described by a function of time.
 Module 15 : Vector fields, Gradient, Divergence and Curl Lecture 45 : Curves in space [Section 45.1] Objectives In this section you will learn the following : Concept of curve in space. Parametrization
Module 15 : Vector fields, Gradient, Divergence and Curl Lecture 45 : Curves in space [Section 45.1] Objectives In this section you will learn the following : Concept of curve in space. Parametrization
CS 523: Computer Graphics, Spring Shape Modeling. Differential Geometry of Surfaces
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2011 2/22/2011 Differential Geometry of Surfaces Continuous and Discrete Motivation Smoothness
CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2011 2/22/2011 Differential Geometry of Surfaces Continuous and Discrete Motivation Smoothness
Introduction to geometry
 1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
Invariant Measures. The Smooth Approach
 Invariant Measures Mathieu Desbrun & Peter Schröder 1 The Smooth Approach On this show lots of derivatives tedious expressions in coordinates For what? only to discover that there are invariant measures
Invariant Measures Mathieu Desbrun & Peter Schröder 1 The Smooth Approach On this show lots of derivatives tedious expressions in coordinates For what? only to discover that there are invariant measures
Tutorial 4. Differential Geometry I - Curves
 23686 Numerical Geometry of Images Tutorial 4 Differential Geometry I - Curves Anastasia Dubrovina c 22 / 2 Anastasia Dubrovina CS 23686 - Tutorial 4 - Differential Geometry I - Curves Differential Geometry
23686 Numerical Geometry of Images Tutorial 4 Differential Geometry I - Curves Anastasia Dubrovina c 22 / 2 Anastasia Dubrovina CS 23686 - Tutorial 4 - Differential Geometry I - Curves Differential Geometry
SOLVING PARTIAL DIFFERENTIAL EQUATIONS ON POINT CLOUDS
 SOLVING PARTIAL DIFFERENTIAL EQUATIONS ON POINT CLOUDS JIAN LIANG AND HONGKAI ZHAO Abstract. In this paper we present a general framework for solving partial differential equations on manifolds represented
SOLVING PARTIAL DIFFERENTIAL EQUATIONS ON POINT CLOUDS JIAN LIANG AND HONGKAI ZHAO Abstract. In this paper we present a general framework for solving partial differential equations on manifolds represented
Surface Reconstruction with MLS
 Surface Reconstruction with MLS Tobias Martin CS7960, Spring 2006, Feb 23 Literature An Adaptive MLS Surface for Reconstruction with Guarantees, T. K. Dey and J. Sun A Sampling Theorem for MLS Surfaces,
Surface Reconstruction with MLS Tobias Martin CS7960, Spring 2006, Feb 23 Literature An Adaptive MLS Surface for Reconstruction with Guarantees, T. K. Dey and J. Sun A Sampling Theorem for MLS Surfaces,
Surfaces: notes on Geometry & Topology
 Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Research in Computational Differential Geomet
 Research in Computational Differential Geometry November 5, 2014 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. Approximations Often
Research in Computational Differential Geometry November 5, 2014 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. Approximations Often
Mesh Processing Pipeline
 Mesh Smoothing 1 Mesh Processing Pipeline... Scan Reconstruct Clean Remesh 2 Mesh Quality Visual inspection of sensitive attributes Specular shading Flat Shading Gouraud Shading Phong Shading 3 Mesh Quality
Mesh Smoothing 1 Mesh Processing Pipeline... Scan Reconstruct Clean Remesh 2 Mesh Quality Visual inspection of sensitive attributes Specular shading Flat Shading Gouraud Shading Phong Shading 3 Mesh Quality
Unit 10 Circles 10-1 Properties of Circles Circle - the set of all points equidistant from the center of a circle. Chord - A line segment with
 Unit 10 Circles 10-1 Properties of Circles Circle - the set of all points equidistant from the center of a circle. Chord - A line segment with endpoints on the circle. Diameter - A chord which passes through
Unit 10 Circles 10-1 Properties of Circles Circle - the set of all points equidistant from the center of a circle. Chord - A line segment with endpoints on the circle. Diameter - A chord which passes through
Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia
 Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia 2008 1 Non-Convex Non Convex Boundary Convex boundary creates significant distortion Free boundary is better 2 Fixed
Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia 2008 1 Non-Convex Non Convex Boundary Convex boundary creates significant distortion Free boundary is better 2 Fixed
Voronoi Diagram. Xiao-Ming Fu
 Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
What is Geometry Processing? Understanding the math of 3D shape and applying that math to discrete shape
 Geometry Processing What is Geometry Processing? Understanding the math of 3D shape and applying that math to discrete shape What is Geometry Processing? Understanding the math of 3D shape and applying
Geometry Processing What is Geometry Processing? Understanding the math of 3D shape and applying that math to discrete shape What is Geometry Processing? Understanding the math of 3D shape and applying
Curriki Geometry Glossary
 Curriki Geometry Glossary The following terms are used throughout the Curriki Geometry projects and represent the core vocabulary and concepts that students should know to meet Common Core State Standards.
Curriki Geometry Glossary The following terms are used throughout the Curriki Geometry projects and represent the core vocabulary and concepts that students should know to meet Common Core State Standards.
Glossary of dictionary terms in the AP geometry units
 Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Teichmüller Space and Fenchel-Nielsen Coordinates
 Teichmüller Space and Fenchel-Nielsen Coordinates Nathan Lopez November 30, 2015 Abstract Here we give an overview of Teichmüller space and its realization as a smooth manifold through Fenchel- Nielsen
Teichmüller Space and Fenchel-Nielsen Coordinates Nathan Lopez November 30, 2015 Abstract Here we give an overview of Teichmüller space and its realization as a smooth manifold through Fenchel- Nielsen
a triangle with all acute angles acute triangle angles that share a common side and vertex adjacent angles alternate exterior angles
 acute triangle a triangle with all acute angles adjacent angles angles that share a common side and vertex alternate exterior angles two non-adjacent exterior angles on opposite sides of the transversal;
acute triangle a triangle with all acute angles adjacent angles angles that share a common side and vertex alternate exterior angles two non-adjacent exterior angles on opposite sides of the transversal;
Spline Curves. Spline Curves. Prof. Dr. Hans Hagen Algorithmic Geometry WS 2013/2014 1
 Spline Curves Prof. Dr. Hans Hagen Algorithmic Geometry WS 2013/2014 1 Problem: In the previous chapter, we have seen that interpolating polynomials, especially those of high degree, tend to produce strong
Spline Curves Prof. Dr. Hans Hagen Algorithmic Geometry WS 2013/2014 1 Problem: In the previous chapter, we have seen that interpolating polynomials, especially those of high degree, tend to produce strong
Mathematical Research Letters 1, (1994) MÖBIUS CONE STRUCTURES ON 3-DIMENSIONAL MANIFOLDS. Feng Luo
 MÖBIUS CONE STRUCTURES ON 3-DIMENSIONAL MANIFOLDS. Feng Luo") Mathematical Research Letters 1, 257 261 (1994) MÖBIUS CONE STRUCTURES ON 3-DIMENSIONAL MANIFOLDS Feng Luo Abstract. We show that for any given angle α (0, 2π), any closed 3- manifold has a Möbius cone
Mathematical Research Letters 1, 257 261 (1994) MÖBIUS CONE STRUCTURES ON 3-DIMENSIONAL MANIFOLDS Feng Luo Abstract. We show that for any given angle α (0, 2π), any closed 3- manifold has a Möbius cone
Triangle meshes I. CS 4620 Lecture Kavita Bala (with previous instructor Marschner) Cornell CS4620 Fall 2015 Lecture 2
 Cornell CS4620 Fall 2015 Lecture 2") Triangle meshes I CS 4620 Lecture 2 1 Shape http://fc00.deviantart.net/fs70/f/2014/220/5/3/audi_r8_render_by_smiska333-d7u9pjt.jpg spheres Andrzej Barabasz approximate sphere Rineau & Yvinec CGAL manual
Triangle meshes I CS 4620 Lecture 2 1 Shape http://fc00.deviantart.net/fs70/f/2014/220/5/3/audi_r8_render_by_smiska333-d7u9pjt.jpg spheres Andrzej Barabasz approximate sphere Rineau & Yvinec CGAL manual
03 - Reconstruction. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Spring 17 - Daniele Panozzo
 3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
GAUSS-BONNET FOR DISCRETE SURFACES
 GAUSS-BONNET FOR DISCRETE SURFACES SOHINI UPADHYAY Abstract. Gauss-Bonnet is a deep result in differential geometry that illustrates a fundamental relationship between the curvature of a surface and its
GAUSS-BONNET FOR DISCRETE SURFACES SOHINI UPADHYAY Abstract. Gauss-Bonnet is a deep result in differential geometry that illustrates a fundamental relationship between the curvature of a surface and its
Introduction to Immersion, Embedding, and the Whitney Embedding Theorems
 Introduction to Immersion, Embedding, and the Whitney Embedding Theorems Paul Rapoport November 23, 2015 Abstract We give an overview of immersion in order to present the idea of embedding, then discuss
Introduction to Immersion, Embedding, and the Whitney Embedding Theorems Paul Rapoport November 23, 2015 Abstract We give an overview of immersion in order to present the idea of embedding, then discuss
Outline. Reconstruction of 3D Meshes from Point Clouds. Motivation. Problem Statement. Applications. Challenges
 Reconstruction of 3D Meshes from Point Clouds Ming Zhang Patrick Min cs598b, Geometric Modeling for Computer Graphics Feb. 17, 2000 Outline - problem statement - motivation - applications - challenges
Reconstruction of 3D Meshes from Point Clouds Ming Zhang Patrick Min cs598b, Geometric Modeling for Computer Graphics Feb. 17, 2000 Outline - problem statement - motivation - applications - challenges
DEPARTMENT - Mathematics. Coding: N Number. A Algebra. G&M Geometry and Measure. S Statistics. P - Probability. R&P Ratio and Proportion
 DEPARTMENT - Mathematics Coding: N Number A Algebra G&M Geometry and Measure S Statistics P - Probability R&P Ratio and Proportion YEAR 7 YEAR 8 N1 Integers A 1 Simplifying G&M1 2D Shapes N2 Decimals S1
DEPARTMENT - Mathematics Coding: N Number A Algebra G&M Geometry and Measure S Statistics P - Probability R&P Ratio and Proportion YEAR 7 YEAR 8 N1 Integers A 1 Simplifying G&M1 2D Shapes N2 Decimals S1
Parameterization of Triangular Meshes with Virtual Boundaries
 Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
Lawrence Public Schools Mathematics Curriculum Map, Geometry
 Chapter 1: An Informal Introduction to Suggested Time frame: 21 days G-CO.12 Make formal geometric constructions with a variety of tools and methods (compass and straightedge, string, reflective devices,
Chapter 1: An Informal Introduction to Suggested Time frame: 21 days G-CO.12 Make formal geometric constructions with a variety of tools and methods (compass and straightedge, string, reflective devices,
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]
![Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]](/thumbs/93/111713975.jpg "Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]") Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Euler s Theorem. Brett Chenoweth. February 26, 2013
 Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS
 GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
Saab. Kyle McDonald. Polygon Meshes
 Saab Kyle McDonald Polygon Meshes Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 What is a polygon mesh? Like a point cloud, it is a discrete sampling of a surface... but, it adds linear (flat)
Saab Kyle McDonald Polygon Meshes Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 What is a polygon mesh? Like a point cloud, it is a discrete sampling of a surface... but, it adds linear (flat)
Point A location in geometry. A point has no dimensions without any length, width, or depth. This is represented by a dot and is usually labelled.
 Test Date: November 3, 2016 Format: Scored out of 100 points. 8 Multiple Choice (40) / 8 Short Response (60) Topics: Points, Angles, Linear Objects, and Planes Recognizing the steps and procedures for
Test Date: November 3, 2016 Format: Scored out of 100 points. 8 Multiple Choice (40) / 8 Short Response (60) Topics: Points, Angles, Linear Objects, and Planes Recognizing the steps and procedures for
Solution 2. ((3)(1) (2)(1), (4 3), (4)(2) (3)(3)) = (1, 1, 1) D u (f) = (6x + 2yz, 2y + 2xz, 2xy) (0,1,1) = = 4 14
(1) (2)(1), (4 3), (4)(2) (3)(3)) = (1, 1, 1) D u (f) = (6x + 2yz, 2y + 2xz, 2xy) (0,1,1) = = 4 14") Vector and Multivariable Calculus L Marizza A Bailey Practice Trimester Final Exam Name: Problem 1. To prepare for true/false and multiple choice: Compute the following (a) (4, 3) ( 3, 2) Solution 1. (4)(
Vector and Multivariable Calculus L Marizza A Bailey Practice Trimester Final Exam Name: Problem 1. To prepare for true/false and multiple choice: Compute the following (a) (4, 3) ( 3, 2) Solution 1. (4)(
Iain Claridge. Surface Curvature
 Iain Claridge Surface Curvature Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Curves and surfaces in 3D For our purposes: A curve is a map α : ℝ ℝ3 a b I (or from some subset I of ℝ) α(a) α(b)
Iain Claridge Surface Curvature Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Curves and surfaces in 3D For our purposes: A curve is a map α : ℝ ℝ3 a b I (or from some subset I of ℝ) α(a) α(b)
UNIVERSITY OF CALGARY. Subdivision Surfaces. Advanced Geometric Modeling Faramarz Samavati
 Subdivision Surfaces Surfaces Having arbitrary Topologies Tensor Product Surfaces Non Tensor Surfaces We can t find u-curves and v-curves in general surfaces General Subdivision Coarse mesh Subdivision
Subdivision Surfaces Surfaces Having arbitrary Topologies Tensor Product Surfaces Non Tensor Surfaces We can t find u-curves and v-curves in general surfaces General Subdivision Coarse mesh Subdivision
Ohio Tutorials are designed specifically for the Ohio Learning Standards to prepare students for the Ohio State Tests and end-ofcourse
 Tutorial Outline Ohio Tutorials are designed specifically for the Ohio Learning Standards to prepare students for the Ohio State Tests and end-ofcourse exams. Math Tutorials offer targeted instruction,
Tutorial Outline Ohio Tutorials are designed specifically for the Ohio Learning Standards to prepare students for the Ohio State Tests and end-ofcourse exams. Math Tutorials offer targeted instruction,
Lecture 6 Introduction to Numerical Geometry. Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2018
 Lecture 6 Introduction to Numerical Geometry Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2018 Outline Introduction Basic concepts in geometry Discrete geometry Metric for discrete
Lecture 6 Introduction to Numerical Geometry Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2018 Outline Introduction Basic concepts in geometry Discrete geometry Metric for discrete
Geometry Processing TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAA
 Geometry Processing What is Geometry Processing? Understanding the math of 3D shape What is Geometry Processing? Understanding the math of 3D shape and applying that math to discrete shape What is Geometry
Geometry Processing What is Geometry Processing? Understanding the math of 3D shape What is Geometry Processing? Understanding the math of 3D shape and applying that math to discrete shape What is Geometry
Restricted-Orientation Convexity in Higher-Dimensional Spaces
 Restricted-Orientation Convexity in Higher-Dimensional Spaces ABSTRACT Eugene Fink Derick Wood University of Waterloo, Waterloo, Ont, Canada N2L3G1 {efink, dwood}@violetwaterlooedu A restricted-oriented
Restricted-Orientation Convexity in Higher-Dimensional Spaces ABSTRACT Eugene Fink Derick Wood University of Waterloo, Waterloo, Ont, Canada N2L3G1 {efink, dwood}@violetwaterlooedu A restricted-oriented
Parameterization. Michael S. Floater. November 10, 2011
 Parameterization Michael S. Floater November 10, 2011 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to generate from point
Parameterization Michael S. Floater November 10, 2011 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to generate from point
Def De orma f tion orma Disney/Pixar
 Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Inverse and Implicit functions
 CHAPTER 3 Inverse and Implicit functions. Inverse Functions and Coordinate Changes Let U R d be a domain. Theorem. (Inverse function theorem). If ϕ : U R d is differentiable at a and Dϕ a is invertible,
CHAPTER 3 Inverse and Implicit functions. Inverse Functions and Coordinate Changes Let U R d be a domain. Theorem. (Inverse function theorem). If ϕ : U R d is differentiable at a and Dϕ a is invertible,
Laplacian Meshes. COS 526 Fall 2016 Slides from Olga Sorkine and Yaron Lipman
 Laplacian Meshes COS 526 Fall 2016 Slides from Olga Sorkine and Yaron Lipman Outline Differential surface representation Ideas and applications Compact shape representation Mesh editing and manipulation
Laplacian Meshes COS 526 Fall 2016 Slides from Olga Sorkine and Yaron Lipman Outline Differential surface representation Ideas and applications Compact shape representation Mesh editing and manipulation
Review of Tuesday. ECS 175 Chapter 3: Object Representation
 Review of Tuesday We have learnt how to rasterize lines and fill polygons Colors (and other attributes) are specified at vertices Interpolation required to fill polygon with attributes 26 Review of Tuesday
Review of Tuesday We have learnt how to rasterize lines and fill polygons Colors (and other attributes) are specified at vertices Interpolation required to fill polygon with attributes 26 Review of Tuesday
Parallel Computation of Spherical Parameterizations for Mesh Analysis. Th. Athanasiadis and I. Fudos University of Ioannina, Greece
 Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
Laplacian Operator and Smoothing
 Laplacian Operator and Smoothing Xifeng Gao Acknowledgements for the slides: Olga Sorkine-Hornung, Mario Botsch, and Daniele Panozzo Applications in Geometry Processing Smoothing Parameterization Remeshing
Laplacian Operator and Smoothing Xifeng Gao Acknowledgements for the slides: Olga Sorkine-Hornung, Mario Botsch, and Daniele Panozzo Applications in Geometry Processing Smoothing Parameterization Remeshing
Geometry and Gravitation
 Chapter 15 Geometry and Gravitation 15.1 Introduction to Geometry Geometry is one of the oldest branches of mathematics, competing with number theory for historical primacy. Like all good science, its
Chapter 15 Geometry and Gravitation 15.1 Introduction to Geometry Geometry is one of the oldest branches of mathematics, competing with number theory for historical primacy. Like all good science, its
Lagrange multipliers October 2013
 Lagrange multipliers 14.8 14 October 2013 Example: Optimization with constraint. Example: Find the extreme values of f (x, y) = x + 2y on the ellipse 3x 2 + 4y 2 = 3. 3/2 1 1 3/2 Example: Optimization
Lagrange multipliers 14.8 14 October 2013 Example: Optimization with constraint. Example: Find the extreme values of f (x, y) = x + 2y on the ellipse 3x 2 + 4y 2 = 3. 3/2 1 1 3/2 Example: Optimization
Geometry Definitions and Theorems. Chapter 9. Definitions and Important Terms & Facts
 Geometry Definitions and Theorems Chapter 9 Definitions and Important Terms & Facts A circle is the set of points in a plane at a given distance from a given point in that plane. The given point is the
Geometry Definitions and Theorems Chapter 9 Definitions and Important Terms & Facts A circle is the set of points in a plane at a given distance from a given point in that plane. The given point is the
Integrated Mathematics I Performance Level Descriptors
 Limited A student performing at the Limited Level demonstrates a minimal command of Ohio s Learning Standards for Integrated Mathematics I. A student at this level has an emerging ability to demonstrate
Limited A student performing at the Limited Level demonstrates a minimal command of Ohio s Learning Standards for Integrated Mathematics I. A student at this level has an emerging ability to demonstrate
Geometry of Flat Surfaces
 Geometry of Flat Surfaces Marcelo iana IMPA - Rio de Janeiro Xi an Jiaotong University 2005 Geometry of Flat Surfaces p.1/43 Some (non-flat) surfaces Sphere (g = 0) Torus (g = 1) Bitorus (g = 2) Geometry
Geometry of Flat Surfaces Marcelo iana IMPA - Rio de Janeiro Xi an Jiaotong University 2005 Geometry of Flat Surfaces p.1/43 Some (non-flat) surfaces Sphere (g = 0) Torus (g = 1) Bitorus (g = 2) Geometry
Moving Least Squares Multiresolution Surface Approximation
 Moving Least Squares Multiresolution Surface Approximation BORIS MEDEROS LUIZ VELHO LUIZ HENRIQUE DE FIGUEIREDO IMPA Instituto de Matemática Pura e Aplicada Estrada Dona Castorina 110, 22461-320 Rio de
Moving Least Squares Multiresolution Surface Approximation BORIS MEDEROS LUIZ VELHO LUIZ HENRIQUE DE FIGUEIREDO IMPA Instituto de Matemática Pura e Aplicada Estrada Dona Castorina 110, 22461-320 Rio de
Surfaces, meshes, and topology
 Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Curve Corner Cutting
 Subdivision ision Techniqueses Spring 2010 1 Curve Corner Cutting Take two points on different edges of a polygon and join them with a line segment. Then, use this line segment to replace all vertices
Subdivision ision Techniqueses Spring 2010 1 Curve Corner Cutting Take two points on different edges of a polygon and join them with a line segment. Then, use this line segment to replace all vertices
2D Spline Curves. CS 4620 Lecture 18
 2D Spline Curves CS 4620 Lecture 18 2014 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes that is, without discontinuities So far we can make things with corners (lines,
2D Spline Curves CS 4620 Lecture 18 2014 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes that is, without discontinuities So far we can make things with corners (lines,
REGULAR GRAPHS OF GIVEN GIRTH. Contents
 REGULAR GRAPHS OF GIVEN GIRTH BROOKE ULLERY Contents 1. Introduction This paper gives an introduction to the area of graph theory dealing with properties of regular graphs of given girth. A large portion
REGULAR GRAPHS OF GIVEN GIRTH BROOKE ULLERY Contents 1. Introduction This paper gives an introduction to the area of graph theory dealing with properties of regular graphs of given girth. A large portion
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Spectral Compression of Mesh Geometry
 Spectral Compression of Mesh Geometry Zachi Karni, Craig Gotsman SIGGRAPH 2000 1 Introduction Thus far, topology coding drove geometry coding. Geometric data contains far more information (15 vs. 3 bits/vertex).
Spectral Compression of Mesh Geometry Zachi Karni, Craig Gotsman SIGGRAPH 2000 1 Introduction Thus far, topology coding drove geometry coding. Geometric data contains far more information (15 vs. 3 bits/vertex).
Computergrafik. Matthias Zwicker Universität Bern Herbst 2016
 Computergrafik Matthias Zwicker Universität Bern Herbst 2016 Today Curves NURBS Surfaces Parametric surfaces Bilinear patch Bicubic Bézier patch Advanced surface modeling 2 Piecewise Bézier curves Each
Computergrafik Matthias Zwicker Universität Bern Herbst 2016 Today Curves NURBS Surfaces Parametric surfaces Bilinear patch Bicubic Bézier patch Advanced surface modeling 2 Piecewise Bézier curves Each
Geometric Registration for Deformable Shapes 2.2 Deformable Registration
 Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Geometric structures on manifolds
 CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
Elementary Planar Geometry
 Elementary Planar Geometry What is a geometric solid? It is the part of space occupied by a physical object. A geometric solid is separated from the surrounding space by a surface. A part of the surface
Elementary Planar Geometry What is a geometric solid? It is the part of space occupied by a physical object. A geometric solid is separated from the surrounding space by a surface. A part of the surface
Lectures in Discrete Differential Geometry 3 Discrete Surfaces
 Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
STATISTICS AND ANALYSIS OF SHAPE
 Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
Optimizing triangular meshes to have the incrircle packing property
 Packing Circles and Spheres on Surfaces Ali Mahdavi-Amiri Introduction Optimizing triangular meshes to have p g g the incrircle packing property Our Motivation PYXIS project Geometry Nature Geometry Isoperimetry
Packing Circles and Spheres on Surfaces Ali Mahdavi-Amiri Introduction Optimizing triangular meshes to have p g g the incrircle packing property Our Motivation PYXIS project Geometry Nature Geometry Isoperimetry
Differential Geometry: Circle Packings. [A Circle Packing Algorithm, Collins and Stephenson] [CirclePack, Ken Stephenson]
![Differential Geometry: Circle Packings. [A Circle Packing Algorithm, Collins and Stephenson] [CirclePack, Ken Stephenson]](/thumbs/85/92091407.jpg "Differential Geometry: Circle Packings. [A Circle Packing Algorithm, Collins and Stephenson] [CirclePack, Ken Stephenson]") Differential Geometry: Circle Packings [A Circle Packing Algorithm, Collins and Stephenson] [CirclePack, Ken Stephenson] Conformal Maps Recall: Given a domain Ω R 2, the map F:Ω R 2 is conformal if it
Differential Geometry: Circle Packings [A Circle Packing Algorithm, Collins and Stephenson] [CirclePack, Ken Stephenson] Conformal Maps Recall: Given a domain Ω R 2, the map F:Ω R 2 is conformal if it
The topology of limits of embedded minimal disks. (joint work with Jacob Bernstein) Giuseppe Tinaglia King s College London
 Giuseppe Tinaglia King s College London") The topology of limits of embedded minimal disks. (joint work with Jacob Bernstein) Giuseppe Tinaglia King s College London Notations; Background; Main result; Possible questions; Another proof. Let M
The topology of limits of embedded minimal disks. (joint work with Jacob Bernstein) Giuseppe Tinaglia King s College London Notations; Background; Main result; Possible questions; Another proof. Let M
Estimating normal vectors and curvatures by centroid weights
 Computer Aided Geometric Design 21 (2004) 447 458 www.elsevier.com/locate/cagd Estimating normal vectors and curvatures by centroid weights Sheng-Gwo Chen, Jyh-Yang Wu Department of Mathematics, National
Computer Aided Geometric Design 21 (2004) 447 458 www.elsevier.com/locate/cagd Estimating normal vectors and curvatures by centroid weights Sheng-Gwo Chen, Jyh-Yang Wu Department of Mathematics, National
Generalized barycentric coordinates
 Generalized barycentric coordinates Michael S. Floater August 20, 2012 In this lecture, we review the definitions and properties of barycentric coordinates on triangles, and study generalizations to convex,
Generalized barycentric coordinates Michael S. Floater August 20, 2012 In this lecture, we review the definitions and properties of barycentric coordinates on triangles, and study generalizations to convex,
Lectures 19: The Gauss-Bonnet Theorem I. Table of contents
 Math 348 Fall 07 Lectures 9: The Gauss-Bonnet Theorem I Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams. In
Math 348 Fall 07 Lectures 9: The Gauss-Bonnet Theorem I Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams. In
Triangle meshes I. CS 4620 Lecture Steve Marschner. Cornell CS4620 Spring 2017
 Triangle meshes I CS 4620 Lecture 2 2017 Steve Marschner 1 spheres Andrzej Barabasz approximate sphere Rineau & Yvinec CGAL manual 2017 Steve Marschner 2 finite element analysis PATRIOT Engineering 2017
Triangle meshes I CS 4620 Lecture 2 2017 Steve Marschner 1 spheres Andrzej Barabasz approximate sphere Rineau & Yvinec CGAL manual 2017 Steve Marschner 2 finite element analysis PATRIOT Engineering 2017
Introduction to the Mathematical Concepts of CATIA V5
 CATIA V5 Training Foils Introduction to the Mathematical Concepts of CATIA V5 Version 5 Release 19 January 2009 EDU_CAT_EN_MTH_FI_V5R19 1 About this course Objectives of the course Upon completion of this
CATIA V5 Training Foils Introduction to the Mathematical Concepts of CATIA V5 Version 5 Release 19 January 2009 EDU_CAT_EN_MTH_FI_V5R19 1 About this course Objectives of the course Upon completion of this
Geometric Modeling in Graphics
 Geometric Modeling in Graphics Part 2: Meshes properties Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Meshes properties Working with DCEL representation One connected component with simple
Geometric Modeling in Graphics Part 2: Meshes properties Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Meshes properties Working with DCEL representation One connected component with simple
Lagrange multipliers 14.8
 Lagrange multipliers 14.8 14 October 2013 Example: Optimization with constraint. Example: Find the extreme values of f (x, y) = x + 2y on the ellipse 3x 2 + 4y 2 = 3. 3/2 Maximum? 1 1 Minimum? 3/2 Idea:
Lagrange multipliers 14.8 14 October 2013 Example: Optimization with constraint. Example: Find the extreme values of f (x, y) = x + 2y on the ellipse 3x 2 + 4y 2 = 3. 3/2 Maximum? 1 1 Minimum? 3/2 Idea:
Divided-and-Conquer for Voronoi Diagrams Revisited. Supervisor: Ben Galehouse Presenter: Xiaoqi Cao
 Divided-and-Conquer for Voronoi Diagrams Revisited Supervisor: Ben Galehouse Presenter: Xiaoqi Cao Outline Introduction Generalized Voronoi Diagram Algorithm for building generalized Voronoi Diagram Applications
Divided-and-Conquer for Voronoi Diagrams Revisited Supervisor: Ben Galehouse Presenter: Xiaoqi Cao Outline Introduction Generalized Voronoi Diagram Algorithm for building generalized Voronoi Diagram Applications
Overview. Efficient Simplification of Point-sampled Surfaces. Introduction. Introduction. Neighborhood. Local Surface Analysis
 Overview Efficient Simplification of Pointsampled Surfaces Introduction Local surface analysis Simplification methods Error measurement Comparison PointBased Computer Graphics Mark Pauly PointBased Computer
Overview Efficient Simplification of Pointsampled Surfaces Introduction Local surface analysis Simplification methods Error measurement Comparison PointBased Computer Graphics Mark Pauly PointBased Computer
Triangle meshes I. CS 4620 Lecture 2
 Triangle meshes I CS 4620 Lecture 2 2014 Steve Marschner 1 spheres Andrzej Barabasz approximate sphere Rineau & Yvinec CGAL manual 2014 Steve Marschner 2 finite element analysis PATRIOT Engineering 2014
Triangle meshes I CS 4620 Lecture 2 2014 Steve Marschner 1 spheres Andrzej Barabasz approximate sphere Rineau & Yvinec CGAL manual 2014 Steve Marschner 2 finite element analysis PATRIOT Engineering 2014
Subdivision Surfaces
 Subdivision Surfaces 1 Geometric Modeling Sometimes need more than polygon meshes Smooth surfaces Traditional geometric modeling used NURBS Non uniform rational B-Spline Demo 2 Problems with NURBS A single
Subdivision Surfaces 1 Geometric Modeling Sometimes need more than polygon meshes Smooth surfaces Traditional geometric modeling used NURBS Non uniform rational B-Spline Demo 2 Problems with NURBS A single