Rigid ICP registration with Kinect
|
|
|
- Francis Dalton
- 6 years ago
- Views:
Transcription
1 Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1
2 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7 Methods..p.10 Performances p.11 About the project..p.12 References..p.13 More results..p.14 2
3 Overview The main goal of the first part of the project was to perform an Iterative Closest Point registration on two depth maps obtained using the Kinect depth sensor in C++ on the windows platform. The other purposes of this first part was to learn how to integrate alone big libraries (dynamic or not) to the project and to handle with the difficulties of implementing an algorithm on the different classes of the libraries whom do not match necessarily one with the other. The second part of the project was to bond, two by two with the precedent algorithm, different scan frames get by the Kinect with the help of its motor to get a whole body depth image. Development of the project After reading the papers of Hao-Ii, Besl & McKay and Rusinkiewicz & Levoy we first tried, with different interfaces, to obtain the two frames of the depth map. We chose the OpenNi interface to get the wanted depth frames. To implement the rigid ICP algorithm we had to use a library matrix handler, after searching some libraries (armadillo and others), we used (by Yonathan guidance) the OpenCV library for the matrices calculation need and the depth images displaying. Then we developed the simplest rigid Iterative Closest Point algorithm (as describe below) same as in the Besl and McKay's paper. Thereafter, in order to ensure the success of our project we decided to improve our algorithm as describe below. Then we had to control the motor, which had the consequence to back to a previous version of OPENNI (from 2.0 to 1.5, the development of this tool may have been stopped when PrimeSens get bought by Apple) and learn how to move it for our purpose. After the fusion of the scans we decided to save the results in some formats to allow the user choose the interface he wants to process the depth results (for MeshLab and Matlab process/display) 3
4 Papers The first paper we red was the Hao-Li one. The purpose of his paper was to reconstruct with a Kinect a full body in 3-D with the multiple frames of the body got with the Kinect motor and the rotation of the body on itself to scan all the parts of the body. The reconstruction was divided in pipeline's stations where the first one: scanning, fusion and segmentation were the goal of the entire project. To perform this first part we need, after the body scan, to use the rigid ICP algorithm to bond the different frames together to get the whole body depth image. Thus we had to implement the rigid ICP. The second was Besl & McKay's paper. In this paper all the theory of the first (rigid) iterative closest point algorithm is described. After some mathematical preliminaries the paper focused on the representation of the data as the one which interested us: the Point sets (as the Kinect) and it describes the Corresponding Registration to apply. The algorithm is based on two main actions on a picture. Given a model shape and a measured shape, we will apply on each point of the measured data set a rotation and a translation in the space. The goal is to optimize those transformations by minimizing the distance square error of the transformation on the measured shape to the model as: In order to not affect the performances we cannot pass on all the data points of the images, then we have to select a part of them randomly. To the algorithm understand where the two shapes (points cloud) are in the space we first calculate the center of mass of the two given shapes and get the cross covariance matrix to know what is the link between the two shapes points in the space. After optimization calculations we are able to obtain a unit quaternion vector which will give us the rotation transformation. Then after the rotation transform we can apply the translation transform relatively to the center of mass of the model. We can calculate now the new mean square error and check if the performances are satisfying. The third paper was the paper of Rusinkiewicz & Levoy. This paper checked the performances of the different variants of the rigid ICP algorithm. We then checked which variance will be good enough for our purpose. ICP algorithm is divided in five main steps. Selection of points: we deduced from the paper and the supposed shape of the body (like the "wave " scene) that the random sampling give a good convergence but we also implemented the uniform sampling method which were supposed to improve only a little the performances but in our case the improvement was really important. 4
5 Matching points: the closest point algorithm (as described in Besl & McKay paper) gives a reasonable convergence rate for shapes like bodies. The weighting and rejecting of pairs and the error metric minimization were not used in our algorithm, the initial rigid ICP paper did not treat those variants. 5
6 Project algorithm Using the OpenNI interface we can get two depth frames from the Kinect. Threads assure the user to see itself and let him time to stand in front the camera where to get a good scanning of the body. To get the frames we had to control the kinect motor. After several research about the properties about the motor, we find that it can tilt the field of view using the tilt motor in the sensor. The motor allows an additional [+/-31] degrees. The frames are converted to OpenCV Mat type to deal with displaying, filtering and registration on the depth images. After getting the two frames, we will filter the depth image by distance: all the objects far from this distance and then the useless background will be deleted (zero value pixel). This step is also in the Hao-Li paper (part 3.2) but in our case any sophisticated segmentation algorithms were used but only "distance" filtering. Then the floor have not been removed that is why the position of the user and the field of view of the Kinect must not scan the floor in any frames. If not the algorithm will fail for sure, sampled points won't match between the body and the floor. As said above we have implemented the simple Besl & McKay ICP algorithm we will describe it here: We first randomly/uniformly sampling a fixed number of points whom values are different from zero (just the interesting shape) in the two pictures. There possibly are the same pixels chosen many times in the case of the random point selection. For uniform sampling a grid has been used. With the OpenCV matrices calculation tool we will be able to compute all the vectors, matrices, eigenvectors needed in the algorithm. We first compute the closest point in the two pictures by calculating the minimum Euclidean distance between all pair of points (in the shape and the model). Then we can calculate all the matrices needed and the transformations to apply on each one of the sampled points. We check if the algorithm's convergence is satisfying enough and we decide to continue or stop it (the convergence to a local minimum have been proved in the MacKay paper). We keep the rotation and translation transformation of each iteration in an accessible list for the user. Texturization: body reconstruction by Poisson reconstruction or triangles meshing have been done on Matlab but because both the not incredibly good results and the Matlab and not C++ implementation have convinced us to not add it to the project. (The code and results are existing and can be given if asked). The RGB representation needs a triangulation to be display that is why it is not a part of the results. 6




7 Results Other results can be found at the end of the report. Input Frames: First frame 20 th Frame 50 th Frame Output: Matlab Result Displaying 7

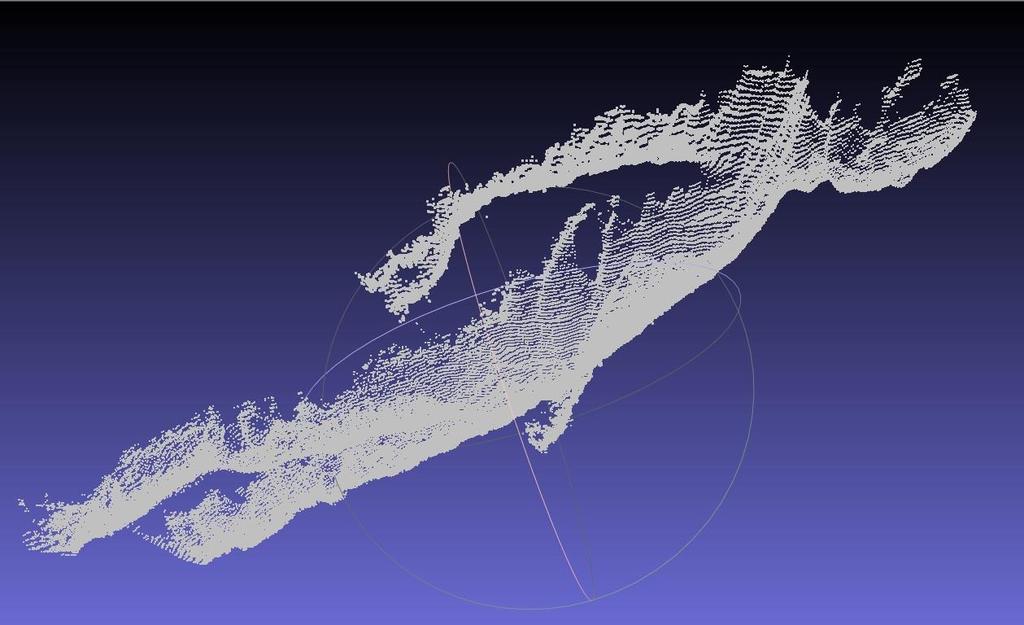
8 MeshLab Result MeshLab Result 8


9 MeshLab Result MeshLab Result 9
10 Methods Problem: The main problem is the initial position of 2 frames. If they are not close enough the algorithm may converge to a local minimum instead of the global. That s why the biggest challenge is to find the right match. The sampling is then the most important step. The third problem is the depth frame return by the Kinect is of a poor quality which means that in addition of the transformation the matching point is difficult because the 2 frames are different and find correspondences can be a more difficult task. Solution: We start by improving the method of the sampling, from random to uniform. The algorithm passes on the entire matrix on a grid, by sampling only depth values greater than zero (not background). The Openni Camera driver provides default camera models out-of-the-box with reasonably accurate focal lengths (relating 3D points to 2D image coordinates). They do not model lens distortion, but fortunately the Kinect uses low-distortion lenses ( k1 ~= 0.1), so even the edges of the image are not displaced by more than a few pixels. Since our application requires maximum accuracy from the Kinect's 3D data we should to perform a rigorous calibration. But finally, since our application would be used by different users with different Kinect we decided to perform a general, average calibration with an average intrinsic matrix calibration. More precise calibration will improve the performances and the final result but ask from the user a tiresome calibration step. In each execution the algorithm, as said before, has to find a sequence of rotation and translation; that s why we wanted to help the algorithm by giving him a prior rotation that it needs to perform. For that we had to know an average angle covered by the Kinect between two frames. Below we joined the rotation matrix for a given angle: The Rotation of the motor is really not accurate. We noticed that the motor move are not the same (not same angle) at each iteration. So we decided to not help the algorithm with the first matrix rotation (this try did not really improve the results). At the beginning, we tried to perform ICP between a frame and the result of the all precedent frames bonded together. But after some execution, the result, due to the accumulated noise, is far from the reality and the algorithm don t find right match between the new frame and the precedent bonded result. So we found better to perform ICP between pair of frames. It is an application of the transitivity law: if the transformation between frame i an d frame i-1 is optimal and the transformation between i+1 and i is optimal too, then the transformation sequence between i+1 and i-1 is optimal: 11
11 ( ) n n n n n n n Tr F R F T Tr Tr Tr F, with F the frame, Tr the transformation, R and T the corresponding Rotation translation. The last methods that we used to reduce noise accumulation was to add only the new data part of the new frame at the bottom of the picture. Performances Our ICP algorithm and the ICP algorithm in general does not give good performances for big moves of the shapes. Only little rotations can converge in a satisfying way. Translation is not a problem, the calculation of the center of mass give us quickly the translation to apply even for big distances. One of the problems of the closest point matching part is that for rotation of the body the distance can match points in the two pictures that are totally different but because of the rotation are at the same depth distance. The big number of samples and the small moves of the user seems solve this problem. As said above, for big moves ICP algorithm can give bad results, sometimes it would appear it converges to a wrong local minimum (as described in the Besl & McKay paper). Even for big moves the algorithm converges quickly enough: from 1-3 iterations for small moves or simple shapes (like lines created artificially in the code) to about 10 iterations for big rotations (without or with translations) where it seems not converging well at all. One of the implementation problems is the loss of data when converting from infinitesimal values of the vectors to indexes in the matrices for displaying that is the reason of the zero value pixel lines on the shape registration. One solution is to use a filter (median) but in some cases it can affects the displayed image (depends on the type of pixels around). The bad resolution of the Kinect affects the image s acquisition: holes in the target shape. At the optimization step, we faced a tradeoff: good fusion result vs time. We test all our methods explain before with different parameters. The number of sampling has the most critical influence on the performance, it s varies between 8000 or less for bad results to or more for good results. Another parameter was the threshold and the number of iteration in each ICP algorithm, after several test we fixed the threshold at As explain above for big rotation it seems not converging well at all, that s why we decided to perform the algorithm in each frames and not by step of two, despite the fact that the time would have been then divided. Then we can say that the average time for the ICP running step is between 1.2~3mn depending on the number of sampled points. The scanning and reconstructing time is about less than one minute. Finding a correspondence radius can improve the closest point search step but all is a matter of wanted performances. Another critical point is the presence of noise in the picture. The resolution of the Kinect is bad and it returns sometimes irrelevant pixels whom are critical and make the algorithm fail. 11
12 About the project The reading of the papers was very interesting and introduced us to the world of computer & geometric vision and to the academic space. The lack of good materials (good computers) at the beginning of the project and the ability of solve computer maintenance problem both in hardware and software were very difficult for us, but thanks to google we gone through it (almost). We lost a lot of time by understanding by our own the way the libraries work and their inabilities to deal with simple problems like casting in OpenCV in matrices conversions etc. the software problems did not help us too. We think support the students on all this maintenance will save lot of time and let the students more time to improve the project itself and not to throw them to Google s help to deal with those new problems never seen before in regular courses at CS or EE. Today we certainly know others libraries and tools would have make the project easier and better. We would like to thank all the peoples from the Laboratory whom help us to complete this project. 12
13 References "3D SELF-PORTRAITS" Hao Li, Etienne Vouga, Anton Gudym, Jonathan T. Barron, Linjie Luo, Gleb Gusev ACM Transactions on Graphics, Proceedings of the 6th ACM SIGGRAPH Conference and Exhibition in Asia 2013, 11/2013 SIGGRAPH ASIA 2013 "A Method for Registration of 3-D Shapes" Besl, Paul J.; N.D. McKay (1992). IEEE Trans. on Pattern Analysis and Machine Intelligence (Los Alamitos, CA, USA: IEEE Computer Society) "Efficient Variants of the ICP Algorithm" Szymon Rusinkiewicz, Marc Levoy Stanford University 13


14 More results Result2-1 Result2-2 14


15 Result2-3 Result2-4 15


16 Result3-1 Result3-2 16

17 Result3-3 17
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Video Over Time. Presented on by. Daniel Kubacki
 3D Video Over Time Presented on 3-10-11 by Daniel Kubacki Co-Advisors: Minh Do & Sanjay Patel This work funded by the Universal Parallel Computing Resource Center 2 What s the BIG deal? Video Rate Capture
3D Video Over Time Presented on 3-10-11 by Daniel Kubacki Co-Advisors: Minh Do & Sanjay Patel This work funded by the Universal Parallel Computing Resource Center 2 What s the BIG deal? Video Rate Capture
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
3D Models from Range Sensors. Gianpaolo Palma
 3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Algorithm research of 3D point cloud registration based on iterative closest point 1
 Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
#$ % $ $& "$%% " $ '$ " '
 ! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
Scanning Real World Objects without Worries 3D Reconstruction
 Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
PHOTOGRAMMETRIC TECHNIQUE FOR TEETH OCCLUSION ANALYSIS IN DENTISTRY
 PHOTOGRAMMETRIC TECHNIQUE FOR TEETH OCCLUSION ANALYSIS IN DENTISTRY V. A. Knyaz a, *, S. Yu. Zheltov a, a State Research Institute of Aviation System (GosNIIAS), 539 Moscow, Russia (knyaz,zhl)@gosniias.ru
PHOTOGRAMMETRIC TECHNIQUE FOR TEETH OCCLUSION ANALYSIS IN DENTISTRY V. A. Knyaz a, *, S. Yu. Zheltov a, a State Research Institute of Aviation System (GosNIIAS), 539 Moscow, Russia (knyaz,zhl)@gosniias.ru
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
A 3D Point Cloud Registration Algorithm based on Feature Points
 International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A 3D Point Cloud Registration Algorithm based on Feature Points Yi Ren 1, 2, a, Fucai Zhou 1, b 1 School
International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A 3D Point Cloud Registration Algorithm based on Feature Points Yi Ren 1, 2, a, Fucai Zhou 1, b 1 School
Skybox. Ruoqi He & Chia-Man Hung. February 26, 2016
 Skybox Ruoqi He & Chia-Man Hung February 26, 206 Introduction In this project, we present a method to construct a skybox from a series of photos we took ourselves. It is a graphical procedure of creating
Skybox Ruoqi He & Chia-Man Hung February 26, 206 Introduction In this project, we present a method to construct a skybox from a series of photos we took ourselves. It is a graphical procedure of creating
Mobile Point Fusion. Real-time 3d surface reconstruction out of depth images on a mobile platform
 Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
STRUCTURAL ICP ALGORITHM FOR POSE ESTIMATION BASED ON LOCAL FEATURES
 STRUCTURAL ICP ALGORITHM FOR POSE ESTIMATION BASED ON LOCAL FEATURES Marco A. Chavarria, Gerald Sommer Cognitive Systems Group. Christian-Albrechts-University of Kiel, D-2498 Kiel, Germany {mc,gs}@ks.informatik.uni-kiel.de
STRUCTURAL ICP ALGORITHM FOR POSE ESTIMATION BASED ON LOCAL FEATURES Marco A. Chavarria, Gerald Sommer Cognitive Systems Group. Christian-Albrechts-University of Kiel, D-2498 Kiel, Germany {mc,gs}@ks.informatik.uni-kiel.de
Clustering in Registration of 3D Point Clouds
 Sergey Arkhangelskiy 1 Ilya Muchnik 2 1 Google Moscow 2 Rutgers University, New Jersey, USA International Workshop Clusters, orders, trees: Methods and applications in honor of Professor Boris Mirkin December
Sergey Arkhangelskiy 1 Ilya Muchnik 2 1 Google Moscow 2 Rutgers University, New Jersey, USA International Workshop Clusters, orders, trees: Methods and applications in honor of Professor Boris Mirkin December
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
3D Digitization of Human Foot Based on Computer Stereo Vision Combined with KINECT Sensor Hai-Qing YANG a,*, Li HE b, Geng-Xin GUO c and Yong-Jun XU d
 2017 International Conference on Mechanical Engineering and Control Automation (ICMECA 2017) ISBN: 978-1-60595-449-3 3D Digitization of Human Foot Based on Computer Stereo Vision Combined with KINECT Sensor
2017 International Conference on Mechanical Engineering and Control Automation (ICMECA 2017) ISBN: 978-1-60595-449-3 3D Digitization of Human Foot Based on Computer Stereo Vision Combined with KINECT Sensor
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
ENGN D Photography / Spring 2018 / SYLLABUS
 ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
A study of a multi-kinect system for human body scanning
 A study of a multi-kinect system for human body scanning A Seminar Report Submitted in partial fulfillment of requirements for the degree of Master of Technology by Shashwat Rohilla Roll No: 133050009
A study of a multi-kinect system for human body scanning A Seminar Report Submitted in partial fulfillment of requirements for the degree of Master of Technology by Shashwat Rohilla Roll No: 133050009
Range Image Registration with Edge Detection in Spherical Coordinates
 Range Image Registration with Edge Detection in Spherical Coordinates Olcay Sertel 1 and Cem Ünsalan2 Computer Vision Research Laboratory 1 Department of Computer Engineering 2 Department of Electrical
Range Image Registration with Edge Detection in Spherical Coordinates Olcay Sertel 1 and Cem Ünsalan2 Computer Vision Research Laboratory 1 Department of Computer Engineering 2 Department of Electrical
Free-form 3D object reconstruction from range images. C. Schütz, T. Jost, H. Hügli
 Free-form 3D object reconstruction from range images C. Schütz, T. Jost, H. Hügli Institute for Microtechnology University of Neuchatel, rue Breguet 2 CH-2000 Neuchatel, Switzerland email: christian.schutz@imt.unine.ch
Free-form 3D object reconstruction from range images C. Schütz, T. Jost, H. Hügli Institute for Microtechnology University of Neuchatel, rue Breguet 2 CH-2000 Neuchatel, Switzerland email: christian.schutz@imt.unine.ch
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Object Reconstruction
 B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Efficient SLAM Scheme Based ICP Matching Algorithm Using Image and Laser Scan Information
 Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
3D Environment Reconstruction
 3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
Accurate Motion Estimation and High-Precision 3D Reconstruction by Sensor Fusion
 007 IEEE International Conference on Robotics and Automation Roma, Italy, 0-4 April 007 FrE5. Accurate Motion Estimation and High-Precision D Reconstruction by Sensor Fusion Yunsu Bok, Youngbae Hwang,
007 IEEE International Conference on Robotics and Automation Roma, Italy, 0-4 April 007 FrE5. Accurate Motion Estimation and High-Precision D Reconstruction by Sensor Fusion Yunsu Bok, Youngbae Hwang,
Intelligent Robots for Handling of Flexible Objects. IRFO Vision System
 Intelligent Robots for Handling of Flexible Objects IRFO Vision System Andreas Jordt Multimedia Information Processing Institute of Computer Science University Kiel IRFO Vision System Overview 2) Sensing
Intelligent Robots for Handling of Flexible Objects IRFO Vision System Andreas Jordt Multimedia Information Processing Institute of Computer Science University Kiel IRFO Vision System Overview 2) Sensing
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Invariant shape similarity. Invariant shape similarity. Invariant similarity. Equivalence. Equivalence. Equivalence. Equal SIMILARITY TRANSFORMATION
 1 Invariant shape similarity Alexer & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 2 Invariant shape similarity 048921 Advanced topics in vision Processing Analysis
1 Invariant shape similarity Alexer & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 2 Invariant shape similarity 048921 Advanced topics in vision Processing Analysis
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
3D Reconstruction of a Hopkins Landmark
 3D Reconstruction of a Hopkins Landmark Ayushi Sinha (461), Hau Sze (461), Diane Duros (361) Abstract - This paper outlines a method for 3D reconstruction from two images. Our procedure is based on known
3D Reconstruction of a Hopkins Landmark Ayushi Sinha (461), Hau Sze (461), Diane Duros (361) Abstract - This paper outlines a method for 3D reconstruction from two images. Our procedure is based on known
Calibrated Image Acquisition for Multi-view 3D Reconstruction
 Calibrated Image Acquisition for Multi-view 3D Reconstruction Sriram Kashyap M S Guide: Prof. Sharat Chandran Indian Institute of Technology, Bombay April 2009 Sriram Kashyap 3D Reconstruction 1/ 42 Motivation
Calibrated Image Acquisition for Multi-view 3D Reconstruction Sriram Kashyap M S Guide: Prof. Sharat Chandran Indian Institute of Technology, Bombay April 2009 Sriram Kashyap 3D Reconstruction 1/ 42 Motivation
Iterative Closest Point Algorithm in the Presence of Anisotropic Noise
 Iterative Closest Point Algorithm in the Presence of Anisotropic Noise L. Maier-Hein, T. R. dos Santos, A. M. Franz, H.-P. Meinzer German Cancer Research Center, Div. of Medical and Biological Informatics
Iterative Closest Point Algorithm in the Presence of Anisotropic Noise L. Maier-Hein, T. R. dos Santos, A. M. Franz, H.-P. Meinzer German Cancer Research Center, Div. of Medical and Biological Informatics
Point Cloud Processing
 Point Cloud Processing Has anyone seen the toothpaste? Given a point cloud: how do you detect and localize objects? how do you map terrain? What is a point cloud? Point cloud: a set of points in 3-D space
Point Cloud Processing Has anyone seen the toothpaste? Given a point cloud: how do you detect and localize objects? how do you map terrain? What is a point cloud? Point cloud: a set of points in 3-D space
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
ECE-161C Cameras. Nuno Vasconcelos ECE Department, UCSD
 ECE-161C Cameras Nuno Vasconcelos ECE Department, UCSD Image formation all image understanding starts with understanding of image formation: projection of a scene from 3D world into image on 2D plane 2
ECE-161C Cameras Nuno Vasconcelos ECE Department, UCSD Image formation all image understanding starts with understanding of image formation: projection of a scene from 3D world into image on 2D plane 2
Measuring and Visualizing Geometrical Differences Using a Consumer Grade Range Camera
 Measuring and Visualizing Geometrical Differences Using a Consumer Grade Range Camera Gijs Ramaekers Supervisor: Jonny Gustafsson Abstract Measuring geometrically complex parts is currently very labor
Measuring and Visualizing Geometrical Differences Using a Consumer Grade Range Camera Gijs Ramaekers Supervisor: Jonny Gustafsson Abstract Measuring geometrically complex parts is currently very labor
3D Editing System for Captured Real Scenes
 3D Editing System for Captured Real Scenes Inwoo Ha, Yong Beom Lee and James D.K. Kim Samsung Advanced Institute of Technology, Youngin, South Korea E-mail: {iw.ha, leey, jamesdk.kim}@samsung.com Tel:
3D Editing System for Captured Real Scenes Inwoo Ha, Yong Beom Lee and James D.K. Kim Samsung Advanced Institute of Technology, Youngin, South Korea E-mail: {iw.ha, leey, jamesdk.kim}@samsung.com Tel:
Il colore: acquisizione e visualizzazione. Lezione 17: 11 Maggio 2012
 Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
3D-2D Laser Range Finder calibration using a conic based geometry shape
 3D-2D Laser Range Finder calibration using a conic based geometry shape Miguel Almeida 1, Paulo Dias 1, Miguel Oliveira 2, Vítor Santos 2 1 Dept. of Electronics, Telecom. and Informatics, IEETA, University
3D-2D Laser Range Finder calibration using a conic based geometry shape Miguel Almeida 1, Paulo Dias 1, Miguel Oliveira 2, Vítor Santos 2 1 Dept. of Electronics, Telecom. and Informatics, IEETA, University
Fundamentals of 3D. Lecture 4: Debriefing: ICP (kd-trees) Homography Graphics pipeline. Frank Nielsen 5 octobre 2011
 Homography Graphics pipeline. Frank Nielsen 5 octobre 2011") INF555 Fundamentals of 3D Lecture 4: Debriefing: ICP (kd-trees) Homography Graphics pipeline Frank Nielsen 5 octobre 2011 nielsen@lix.polytechnique.fr ICP: Iterative Closest Point Algorithm at a glance
INF555 Fundamentals of 3D Lecture 4: Debriefing: ICP (kd-trees) Homography Graphics pipeline Frank Nielsen 5 octobre 2011 nielsen@lix.polytechnique.fr ICP: Iterative Closest Point Algorithm at a glance
EE640 FINAL PROJECT HEADS OR TAILS
 EE640 FINAL PROJECT HEADS OR TAILS By Laurence Hassebrook Initiated: April 2015, updated April 27 Contents 1. SUMMARY... 1 2. EXPECTATIONS... 2 3. INPUT DATA BASE... 2 4. PREPROCESSING... 4 4.1 Surface
EE640 FINAL PROJECT HEADS OR TAILS By Laurence Hassebrook Initiated: April 2015, updated April 27 Contents 1. SUMMARY... 1 2. EXPECTATIONS... 2 3. INPUT DATA BASE... 2 4. PREPROCESSING... 4 4.1 Surface
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect
 A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect Diana Beltran and Luis Basañez Technical University of Catalonia, Barcelona, Spain {diana.beltran,luis.basanez}@upc.edu
A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect Diana Beltran and Luis Basañez Technical University of Catalonia, Barcelona, Spain {diana.beltran,luis.basanez}@upc.edu
A New Approach For 3D Image Reconstruction From Multiple Images
 International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 9, Number 4 (2017) pp. 569-574 Research India Publications http://www.ripublication.com A New Approach For 3D Image Reconstruction
International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 9, Number 4 (2017) pp. 569-574 Research India Publications http://www.ripublication.com A New Approach For 3D Image Reconstruction
Computer Vision. Introduction
 Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Stereoscopic Vision System for reconstruction of 3D objects
 Stereoscopic Vision System for reconstruction of 3D objects Robinson Jimenez-Moreno Professor, Department of Mechatronics Engineering, Nueva Granada Military University, Bogotá, Colombia. Javier O. Pinzón-Arenas
Stereoscopic Vision System for reconstruction of 3D objects Robinson Jimenez-Moreno Professor, Department of Mechatronics Engineering, Nueva Granada Military University, Bogotá, Colombia. Javier O. Pinzón-Arenas
Shape and Appearance from Images and Range Data
 SIGGRAPH 2000 Course on 3D Photography Shape and Appearance from Images and Range Data Brian Curless University of Washington Overview Range images vs. point clouds Registration Reconstruction from point
SIGGRAPH 2000 Course on 3D Photography Shape and Appearance from Images and Range Data Brian Curless University of Washington Overview Range images vs. point clouds Registration Reconstruction from point
Reconstruction of complete 3D object model from multi-view range images.
 Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Project: Camera Rectification and Structure from Motion
 Project: Camera Rectification and Structure from Motion CIS 580, Machine Perception, Spring 2018 April 18, 2018 In this project, you will learn how to estimate the relative poses of two cameras and compute
Project: Camera Rectification and Structure from Motion CIS 580, Machine Perception, Spring 2018 April 18, 2018 In this project, you will learn how to estimate the relative poses of two cameras and compute
SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Michael Hofer a
 SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Michael Hofer a a Institute of Geometry, Vienna University of Technology, Wiedner Hauptstr. 8 10, A
SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Michael Hofer a a Institute of Geometry, Vienna University of Technology, Wiedner Hauptstr. 8 10, A
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
An Overview of Matchmoving using Structure from Motion Methods
 An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Generating 3D Meshes from Range Data
 Princeton University COS598B Lectures on 3D Modeling Generating 3D Meshes from Range Data Robert Kalnins Robert Osada Overview Range Images Optical Scanners Error sources and solutions Range Surfaces Mesh
Princeton University COS598B Lectures on 3D Modeling Generating 3D Meshes from Range Data Robert Kalnins Robert Osada Overview Range Images Optical Scanners Error sources and solutions Range Surfaces Mesh
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
PART IV: RS & the Kinect
 Computer Vision on Rolling Shutter Cameras PART IV: RS & the Kinect Per-Erik Forssén, Erik Ringaby, Johan Hedborg Computer Vision Laboratory Dept. of Electrical Engineering Linköping University Tutorial
Computer Vision on Rolling Shutter Cameras PART IV: RS & the Kinect Per-Erik Forssén, Erik Ringaby, Johan Hedborg Computer Vision Laboratory Dept. of Electrical Engineering Linköping University Tutorial
3D Modeling from Range Images
 1 3D Modeling from Range Images A Comprehensive System for 3D Modeling from Range Images Acquired from a 3D ToF Sensor Dipl.-Inf. March 22th, 2007 Sensor and Motivation 2 3D sensor PMD 1k-S time-of-flight
1 3D Modeling from Range Images A Comprehensive System for 3D Modeling from Range Images Acquired from a 3D ToF Sensor Dipl.-Inf. March 22th, 2007 Sensor and Motivation 2 3D sensor PMD 1k-S time-of-flight
CSE 145/237D FINAL REPORT. 3D Reconstruction with Dynamic Fusion. Junyu Wang, Zeyangyi Wang
 CSE 145/237D FINAL REPORT 3D Reconstruction with Dynamic Fusion Junyu Wang, Zeyangyi Wang Contents Abstract... 2 Background... 2 Implementation... 4 Development setup... 4 Real time capturing... 5 Build
CSE 145/237D FINAL REPORT 3D Reconstruction with Dynamic Fusion Junyu Wang, Zeyangyi Wang Contents Abstract... 2 Background... 2 Implementation... 4 Development setup... 4 Real time capturing... 5 Build
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation
 A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES
 REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES T. Yamakawa a, K. Fukano a,r. Onodera a, H. Masuda a, * a Dept. of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications,
REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES T. Yamakawa a, K. Fukano a,r. Onodera a, H. Masuda a, * a Dept. of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications,
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
Hand-eye calibration with a depth camera: 2D or 3D?
 Hand-eye calibration with a depth camera: 2D or 3D? Svenja Kahn 1, Dominik Haumann 2 and Volker Willert 2 1 Fraunhofer IGD, Darmstadt, Germany 2 Control theory and robotics lab, TU Darmstadt, Darmstadt,
Hand-eye calibration with a depth camera: 2D or 3D? Svenja Kahn 1, Dominik Haumann 2 and Volker Willert 2 1 Fraunhofer IGD, Darmstadt, Germany 2 Control theory and robotics lab, TU Darmstadt, Darmstadt,
Camera Calibration for Video See-Through Head-Mounted Display. Abstract. 1.0 Introduction. Mike Bajura July 7, 1993
 Camera Calibration for Video See-Through Head-Mounted Display Mike Bajura July 7, 1993 Abstract This report describes a method for computing the parameters needed to model a television camera for video
Camera Calibration for Video See-Through Head-Mounted Display Mike Bajura July 7, 1993 Abstract This report describes a method for computing the parameters needed to model a television camera for video
Robust Range Image Registration using a Common Plane
 VRVis Technical Report 1 Robust Range Image Registration using a Common Plane Joachim Bauer bauer@icg.vrvis.at Konrad Karner karner@vrvis.at Andreas Klaus klaus@vrvis.at Roland Perko University of Technology
VRVis Technical Report 1 Robust Range Image Registration using a Common Plane Joachim Bauer bauer@icg.vrvis.at Konrad Karner karner@vrvis.at Andreas Klaus klaus@vrvis.at Roland Perko University of Technology
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
ICP and 3D-Reconstruction
 N. Slottke, H. Linne 1 Nikolas Slottke 1 Hendrik Linne 2 {7slottke, 7linne}@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme
N. Slottke, H. Linne 1 Nikolas Slottke 1 Hendrik Linne 2 {7slottke, 7linne}@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
Introduction to Mobile Robotics Iterative Closest Point Algorithm. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras
 Introduction to Mobile Robotics Iterative Closest Point Algorithm Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation 2 The Problem Given: two corresponding point sets: Wanted: translation
Introduction to Mobile Robotics Iterative Closest Point Algorithm Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation 2 The Problem Given: two corresponding point sets: Wanted: translation
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
3D Modeling using multiple images Exam January 2008
 3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration
 MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
User-assisted Segmentation and 3D Motion Tracking. Michael Fleder Sudeep Pillai Jeremy Scott
 User-assisted Segmentation and 3D Motion Tracking Michael Fleder Sudeep Pillai Jeremy Scott 3D Object Tracking Virtual reality and animation Imitation in robotics Autonomous driving Augmented reality Motivation
User-assisted Segmentation and 3D Motion Tracking Michael Fleder Sudeep Pillai Jeremy Scott 3D Object Tracking Virtual reality and animation Imitation in robotics Autonomous driving Augmented reality Motivation
CS 283: Assignment 1 Geometric Modeling and Mesh Simplification
 CS 283: Assignment 1 Geometric Modeling and Mesh Simplification Ravi Ramamoorthi 1 Introduction This assignment is about triangle meshes as a tool for geometric modeling. As the complexity of models becomes
CS 283: Assignment 1 Geometric Modeling and Mesh Simplification Ravi Ramamoorthi 1 Introduction This assignment is about triangle meshes as a tool for geometric modeling. As the complexity of models becomes
AAM Based Facial Feature Tracking with Kinect
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 3 Sofia 2015 Print ISSN: 1311-9702; Online ISSN: 1314-4081 DOI: 10.1515/cait-2015-0046 AAM Based Facial Feature Tracking
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 3 Sofia 2015 Print ISSN: 1311-9702; Online ISSN: 1314-4081 DOI: 10.1515/cait-2015-0046 AAM Based Facial Feature Tracking