Fundamentals of Computer Graphics. Lecture 3 Parametric curve and surface. Yong-Jin Liu.
|
|
|
- Mae Morton
- 5 years ago
- Views:
Transcription
1 Fundamentals of Computer Graphics Lecture 3 Parametric curve and surface Yong-Jin Liu liuyongjin@tsinghua.edu.cn

2 Smooth curve and surface
3 Design criteria of smooth curve and surface Smooth and continuity Ability to control the local shape Stability Is it easy to draw
4 Smooth and continuity Regard the curve as the orbit of point changing with its parameter u C( u) y( u) zu ( ) 2 n x( u) a0 a1u a2u anu Regard the differential of one point as the its speed along the orbit, the direction of speed is the tangent direction of this point x( u) a1 2a2u nanu C( u) y( u) z ( u) n1
5
6 C n metric of curve smooth Differentiability of function:if parametric curve has continuous derivative until n order at any point in the interval [a, b],i.e. n order continuous differentiable, then the curve is n order parametric continuous in the interval [a, b]. Polynomial curve has infinite order parametric continuous C Polynomial curve of n order p n (x)=a 0 +a 1 x+a 2 x 2 +a n x n
7 Consider two curves with a common point Differentiability of function:if parametric curve has continuous derivative until n order at any point in the interval [a, b],i.e. n order continuous differentiable, then the curve is n order parametric continuous in the interval [a, b]. C 0 continuous C 1 continuous
8 C n curve continuity Differentiability of function:if combined parametric curve has continuous derivative until n order at the joint point, it is called C n or n-order parametric continuous. Is there any thing wrong? The same curve can have different parameters. circle: 1 t xt () x( u) cos( u) or 1 t y( u) sin( u) 2t yt () 1 t 2 2 2
9 Different parameters will get different derivative vector! (0,2) ) (1 ) 2(1, ) (1 4 )) ( ), ( ( (0,1) )) ),cos( sin( ( )) ( ), ( ( t t t t t y t x u u u y u x
10 C(u), u [a, b] C(t), t [0, 1], t u b a a dc( u) dc( t) dt 1 dc( t) 1 C( u) C( t) du dt du b a dt b a
11 Two continuity definitions Differentiability of function:if combined parametric curve has continuous derivative until n order at the joint,i.e. n order continuous differentiable, such smooth is called C n or n order parametric continuous. Geometry continuity:if the direction of derivative vector of combined curve at the joint is equal, then it is n order geometry continuous, denoted by G n.
12 If require G 0 or C 0 continuous at the joint, that is to say two curves are continuous at the joint. If require G 1 continuous at the joint,that is to say two curves are G 0 continuous at the joint, and have the common derivative vector P (1)=aQ (0). when a=1,g 1 continuous is also C 1 continuous If require G 2 continuous at the joint,that is to say two curves are G 1 continuous at the joint, and have common curvature vector.
13 Curvature formula P(1) P (1) Q(0) Q (0) 3 3 P(1) Q(0) This equation can be wrote as : Q a P bp 2 (0) (1) (1) a, b is arbitrary constant. When a=1,b=0,g 2 continuous is also C 2 continuous. P(0) P(t) P(1) Q(0) Q(t) Q(1) Figure continuous of two curves
14 Arc length parameterization of curve The same curve can have different parameter If u(s) is a monotonic function,then C(s)=C(u(s)) is a new parameterization about s of the curve Compute the length L(u) of curve C(u) If there exists parameter s, so that L(s)=s, s 0? s = 0 Length L(s) Parameter s Curve C(s)
15 Arc length parameterization of curve ds Let C( u) du u s C( u) du L( u) 0 u s L s 1 ( ) ( ) dc( s) dc( u( s)) du 1 v( s) C( u) ds du ds C ( u ) vs ( ) 1
16
17 Design criteria of smooth curve and surface Smooth and continuity Ability to control the local shape Stability Is it easy to draw
18 Power based representation of polynomial curve n order polynomial curve C n (u)=a 0 +a 1 u+a 2 u 2 ++a n u n C( u) ( x( u), y( u), z( u)) a u a ( x, y, z ) i i i i C( u) n i0 a a a a u u u i n i i n i T
19 See from the aspect of human computer interaction n order polynomial curve C n (u)=a 0 +a 1 u+a 2 u 2 ++a n u n 1 order polynomial curve: a 1 +a 0 a 1 u+a 0 a 0
20 n order polynomial curve C n (u)=a 0 +a 1 u+a 2 u 2 ++a n u n 2 order polynomial curve: a 2 u 2 +a 1 u+a 0 a 1 a 0 a 2 +a 1 +a 0 2a 2 +a 1 Parabola, ellipse, hyperbola?
21 n order polynomial curve C n (u)=a 0 +a 1 u+a 2 u 2 ++a n u n 3 order polynomial curve: a 3 u 3 +a 2 u 2 +a 1 u+a 0
22 Power based representation of polynomial curve n order polynomial curve C n (u)=a 0 +a 1 u+a 2 u 2 ++a n u n The representation and control ability is very bad Bernstein based representation of polynomial curve Beizer curve Bernstien polynomial n C( u) pibi, n( u) i0 n! i Bin, ( u) u (1 u) i!( n i)! ni
23 f ( u) a a u a u u 2 a 2 p 2 B 2,2 a 0 a 1 u p 0 p 1 1 B 0,2 B 1,2 f ( u) C( u) p B p B p B 0 0,2 1 1,2 2 2,2
24 Bernstein based representation of polynomial curve have clear geometry meaning n C( u) p B ( u) B ( u) p i i, n i, n i i0 i0 n
25 Bernstein based representation of polynomial curve Have clear geometry meaning n C( u) p B ( u) B ( u) p, u [0,1] i i, n i, n i i0 i0 Interpolation of endpoints n n C(0) p B (0) p i0 n i0 i i, n 0 C(1) p B (1) p i i, n n n! i ni Bin, ( u) u (1 u), u [0, 1] i!( n i)!
26 Bernstein based representation of polynomial curve Have clear geometry meaning Why there exists control polygon effect when use Bernstein based representation?
27 1 order Bezier curve n C( u) B ( u) p B ( u) p B ( u) p i0 i, n i 0,1 0 1,1 1 n! i ni Bin, ( u) u (1 u), u [0, 1] i!( n i)! u=0 u=1
28 2 order Bezier curve n C( u) B ( u) p B ( u) p B ( u) p B ( u) p i0 i, n i 0,2 0 1,2 1 2,2 2 n! i ni Bin, ( u) u (1 u), u [0, 1] i!( n i)! u=0 u=1
29 3 order Bezier curve n C( u) B ( u) p B ( u) p B ( u) p B ( u) p B ( u) p i0 i, n i 0,3 0 1,3 1 2,3 2 3,3 3 n! i ni Bin, ( u) u (1 u), u [0, 1] i!( n i)! u=0 u=1
30 9 order Bezier curve 9 C( u) B ( u) p i0 i, n i n! i ni Bin, ( u) u (1 u), u [0, 1] i!( n i)! u=0 u=1 u=0.5
31 Properties of Bezier curve and Bernstein base 1. B i,n (u) 0, for all i, n and 0 u 1 2. Partition of unity n i=0b i,n (u) = 1, 0 u 1 3. B 0,n (0) = B n,n (1) = 1 4. B i,n (u) has and only has a maximum value in the interval [0,1], it is at u=i/n 5. Base set {B i,n (u)} is symmetry about u=1/2 n! i ni Bin, ( u) u (1 u), u [0, 1] i!( n i)!
32 Computation method of Bezier curve Method 1: 9 C( u) B ( u) p i0 i, n n! i ni Bin, ( u) u (1 u), u [0, 1] i!( n i)! Method 2:geometry drawing i
33 Computation method of Bezier curve Method 2 (geometry drawing, ruler drawing): example 2 order Bezier curve 2 C( u) B ( u) P i0 i,2 i (1 u) P 2 u(1 u) P u P (1 u)((1 u) P up ) u((1 u) P up )
34
35
36 2 order Bezier curve 2 C( u) B ( u) P i0 i,2 i (1 u) P 2 u(1 u) P u P (1 u)((1 u) P up ) u((1 u) P up ) Is this property general?
37 Properties of Bezier curve and Bernstein base 6. recursive definition: B i,n (u) = (1u)B i,n1 (u) +ub i1,n1 (u) with B i,n (u) 0, if i < 0 or i > n 7. derivative: B i,n (u) = db i,n (u) /du = n(b i1,n1 (u) B i,n1 (u) ) with B 1,n1 (u) B n,n1 (u) 0 n! i ni Bin, ( u) u (1 u), u [0, 1] i!( n i)!
38 Denote n order Bezier curve as C n (P 0,,P n ), then we have C n (P 0,,P n )=(1u)C n1 (P 0,,P n-1 )+uc n1 (P 1,,P n )
39
40
41 Geometry drawing algorithm n order Bezier curve has C n (P 0,,P n )=(1u)C n1 (P 0,,P n-1 )+uc n1 (P 1,,P n ) denote P i as P 0,i P k,i (u)=(1u)p k1,i (u)+up k1,i+1 (u) k = 1,,n i = 0,,nk decasteljau algorithm


42 Smooth curve and surface in 3D space
43 1D to 2D Regard the curve as the orbit of point changing with its parameter u C( u) y( u) zu ( ) 2 n x( u) a0 a1u a2u anu
44 Tensor product surface Tensor product surfaces S( u, v) ( x( u, v), y( u, v), z( u, v)) n m i0 j0 f ( u) g ( v) b i j i, j [ f ( u)] [ b ][ g ( v)] T i i, j j Base function Geometry coefficient Point S(u 0, v 0 ) Isoparametric lines C(u) = S(u, v 0 ) and C(v) = S(u 0, v)
45
46 Tensor product Bezier surface n m S( u, v) B ( u) B ( v) Point S(u 0, v 0 ) i0 j0 i, n j, m i, j Isoparametric lines C(u) = S(u, v 0 ) and C(v) = S(u 0, v) P
47
48
49 n m S( u, v) B ( u) B ( v) i0 j0 2D Bernstein base P i, n j, m i, j
50 Computation method of Bezier curve Geometry drawing algorithm decasteljau algorithm
51 Computation method of Bezier curve decasteljau algorithm n S( u, v) B ( u) B ( v) P i0 j0 i0 m i, n i, n j, m i, j n m Bi, n ( u) Bj, m( v) Pi, j i0 j0 n B ( u) Q i v u
52
53 Design criteria of smooth curve and surface Smooth and continuity Ability to control the local shape Stability Is it easy to draw Is Bezier curve perfect?
54
55 Beizer curve The representation and control ability of local shape is bad if interpolate many (n+1) discrete point s, then require a high order (n) Bezier curve. How to improve? Splicing many Bezier curve segments n order polynomial curve C n (u)=a 0 +a 1 u+a 2 u 2 ++a n u n
56 Design of B-spline curve Determine the order of continuity p Determine node vector U = {u 0, u 1,, u m }; Determine a set of control points {P 0, P 1,, P n }; The form of B-spline curve is n C( u) Ni, p( u) i0 P i
57 B-spline surface Tensor product surface n m S( u, v) N ( u) N ( v) p1 q1 i0 j0 P i, p j, q i, j r1 U {0,,0, u,, u,1,,1} p1 r p1 s1 q1 sq1 p1 V {0,,0, u,, u,1,,1} q1 r n p 1 and s m q 1
58
59 Ability of local shape change
60 Ability of local shape change
61 The reason is the local scope of basic function P n m S( u, v) N ( u) N ( v) i0 j0 P i, p j, q i, j N ( u) N ( v) [ u, u ) [ v, v ) i, j i, p j, q i i p1 j jq1
62
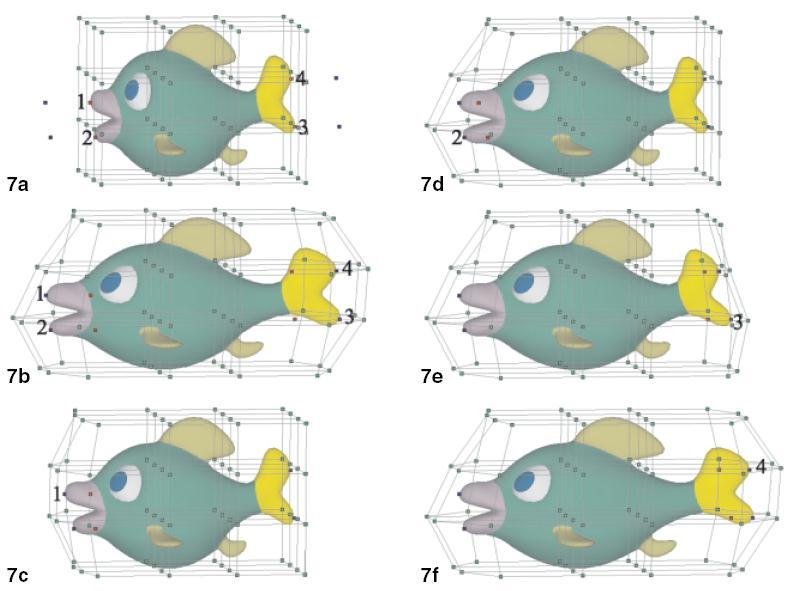
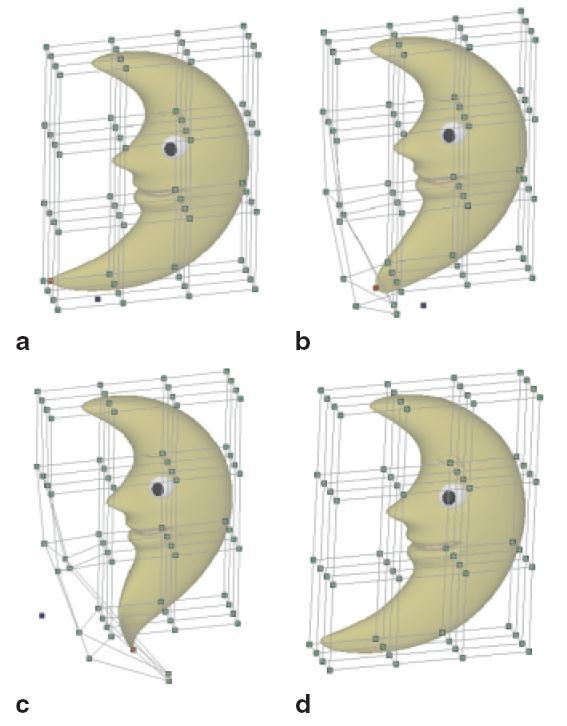
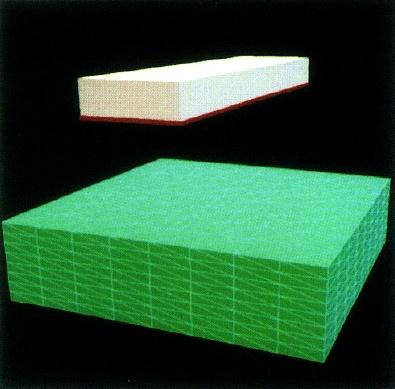
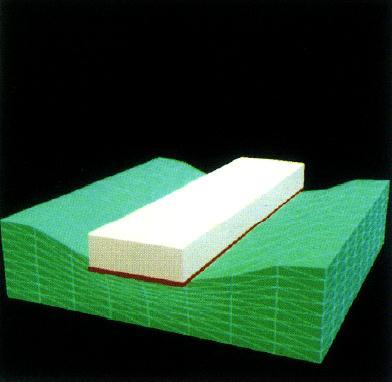
63 Some extensions of NURBS curve and surface Free form deformation (FFD) Subdivision surface
 p1 i0 m1 U {0,,0, u,, u,1,,1} P p1 m p1 i p1 2D surface 3D")
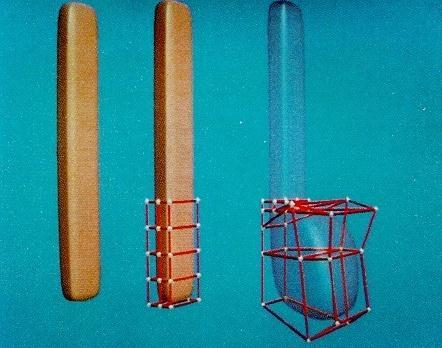
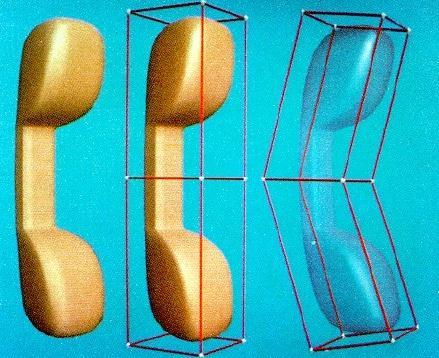
64 Free deformation of parametric curve and surface (FFD) 1D curve n C( u) Ni, p( u) p1 i0 m1 U {0,,0, u,, u,1,,1} P p1 m p1 i p1 2D surface 3D solid
65 Free deformation of parametric curve and surface (FFD) 1D curve 2D surface n m S( u, v) N ( u) N ( v) p1 q1 3D solid i0 j0 P i, p j, q i, j r1 U {0,,0, u,, u,1,,1} p1 r p1 s1 q1 sq1 p1 V {0,,0, u,, u,1,,1} q1
66 Free deformation of parametric curve and surface (FFD) 1D curve 2D surface 3D solid n m l S( u, v, w) N ( u) N ( v) N ( v) P i0 j0 k0 i, p j, q k, r i, j, k o1 U {0,,0, u,, u,1,,1} p1 r p1 p1 p1 s1 V {0,,0, u,, u,1,,1} q1 sq1 q1 q1 t1 W {0,,0, u,, u,1,,1} r1 tr1 r1 r1
67
68
69
70 Free deformation of parametric curve and surface (FFD) 1D curve 2D surface 3D solid Further expansion?
71
72 Free deformation of parametric curve and surface (FFD) 1D curve 2D surface 3D solid Further expansion?

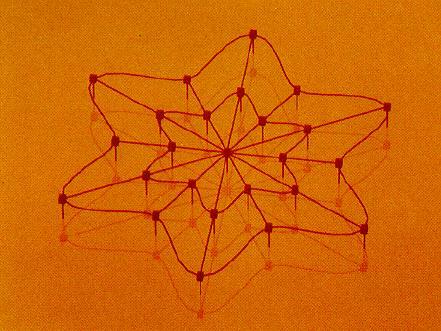
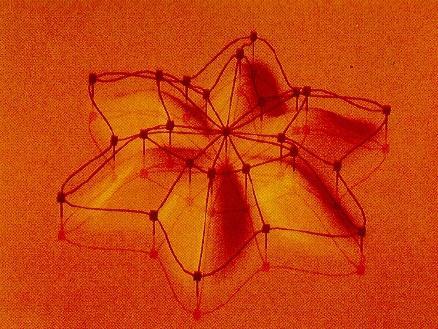
73 Extended Free Form Deformation
74

75
76

77
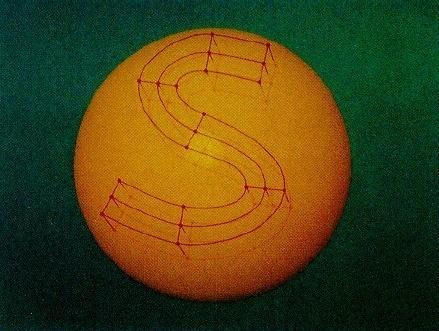
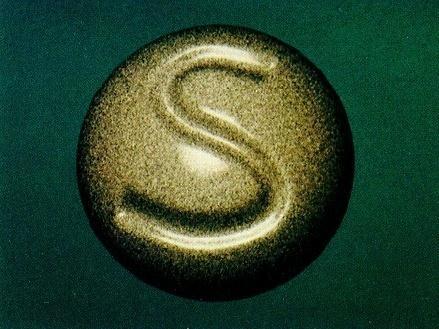
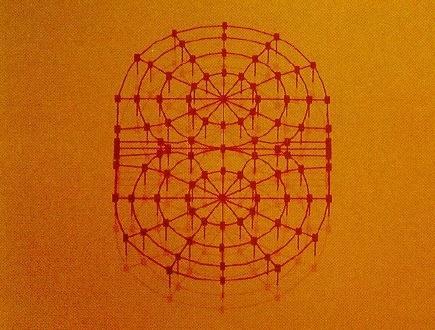
78 Selective Course Project 6 Try to program the following shape using GDI+:
; Point point3(160, 180); Point point4(200, 200); Point point5(230, 150); Point point6(220, 50); Point point7(190, 70); Point point8(130, 220); Point curvepoints[8] = {point1, point2,")
79 Tips: The following code constructs a complicated region using two spline curves using namespace Gdiplus; Graphics graphics( pdc->m_hdc ); Pen pen(color::blue, 3); Point point1( 50, 200); Point point2(100, 150); Point point3(160, 180); Point point4(200, 200); Point point5(230, 150); Point point6(220, 50); Point point7(190, 70); Point point8(130, 220); Point curvepoints[8] = {point1, point2, point3, point4, point5, point6, point7, point8}; Point* pcurvepoints = curvepoints; GraphicsPath path; path.addclosedcurve(curvepoints, 8, 0.5); PathGradientBrush pthgrbrush(&path); pthgrbrush.setcentercolor(color(255, 0, 0, 255)); Color colors[] = {Color(0, 0, 0, 255)}; INT count = 1; pthgrbrush.setsurroundcolors(colors, &count); graphics.drawclosedcurve(&pen, curvepoints, 8, 0.5); graphics.fillpath(&pthgrbrush, &path);
3D Modeling Parametric Curves & Surfaces
 3D Modeling Parametric Curves & Surfaces Shandong University Spring 2012 3D Object Representations Raw data Point cloud Range image Polygon soup Solids Voxels BSP tree CSG Sweep Surfaces Mesh Subdivision
3D Modeling Parametric Curves & Surfaces Shandong University Spring 2012 3D Object Representations Raw data Point cloud Range image Polygon soup Solids Voxels BSP tree CSG Sweep Surfaces Mesh Subdivision
Curve and Surface Basics
 Curve and Surface Basics Implicit and parametric forms Power basis form Bezier curves Rational Bezier Curves Tensor Product Surfaces ME525x NURBS Curve and Surface Modeling Page 1 Implicit and Parametric
Curve and Surface Basics Implicit and parametric forms Power basis form Bezier curves Rational Bezier Curves Tensor Product Surfaces ME525x NURBS Curve and Surface Modeling Page 1 Implicit and Parametric
CS-184: Computer Graphics. Today
 CS-84: Computer Graphics Lecture #5: Curves and Surfaces Prof. James O Brien University of California, Berkeley V25F-5-. Today General curve and surface representations Splines and other polynomial bases
CS-84: Computer Graphics Lecture #5: Curves and Surfaces Prof. James O Brien University of California, Berkeley V25F-5-. Today General curve and surface representations Splines and other polynomial bases
Parametric curves. Brian Curless CSE 457 Spring 2016
 Parametric curves Brian Curless CSE 457 Spring 2016 1 Reading Required: Angel 10.1-10.3, 10.5.2, 10.6-10.7, 10.9 Optional Bartels, Beatty, and Barsky. An Introduction to Splines for use in Computer Graphics
Parametric curves Brian Curless CSE 457 Spring 2016 1 Reading Required: Angel 10.1-10.3, 10.5.2, 10.6-10.7, 10.9 Optional Bartels, Beatty, and Barsky. An Introduction to Splines for use in Computer Graphics
Fall CSCI 420: Computer Graphics. 4.2 Splines. Hao Li.
 Fall 2014 CSCI 420: Computer Graphics 4.2 Splines Hao Li http://cs420.hao-li.com 1 Roller coaster Next programming assignment involves creating a 3D roller coaster animation We must model the 3D curve
Fall 2014 CSCI 420: Computer Graphics 4.2 Splines Hao Li http://cs420.hao-li.com 1 Roller coaster Next programming assignment involves creating a 3D roller coaster animation We must model the 3D curve
CS-184: Computer Graphics
 CS-184: Computer Graphics Lecture #12: Curves and Surfaces Prof. James O Brien University of California, Berkeley V2007-F-12-1.0 Today General curve and surface representations Splines and other polynomial
CS-184: Computer Graphics Lecture #12: Curves and Surfaces Prof. James O Brien University of California, Berkeley V2007-F-12-1.0 Today General curve and surface representations Splines and other polynomial
3D Modeling Parametric Curves & Surfaces. Shandong University Spring 2013
 3D Modeling Parametric Curves & Surfaces Shandong University Spring 2013 3D Object Representations Raw data Point cloud Range image Polygon soup Surfaces Mesh Subdivision Parametric Implicit Solids Voxels
3D Modeling Parametric Curves & Surfaces Shandong University Spring 2013 3D Object Representations Raw data Point cloud Range image Polygon soup Surfaces Mesh Subdivision Parametric Implicit Solids Voxels
CS130 : Computer Graphics Curves. Tamar Shinar Computer Science & Engineering UC Riverside
 CS130 : Computer Graphics Curves Tamar Shinar Computer Science & Engineering UC Riverside Design considerations local control of shape design each segment independently smoothness and continuity ability
CS130 : Computer Graphics Curves Tamar Shinar Computer Science & Engineering UC Riverside Design considerations local control of shape design each segment independently smoothness and continuity ability
Design considerations
 Curves Design considerations local control of shape design each segment independently smoothness and continuity ability to evaluate derivatives stability small change in input leads to small change in
Curves Design considerations local control of shape design each segment independently smoothness and continuity ability to evaluate derivatives stability small change in input leads to small change in
Splines. Parameterization of a Curve. Curve Representations. Roller coaster. What Do We Need From Curves in Computer Graphics? Modeling Complex Shapes
 CSCI 420 Computer Graphics Lecture 8 Splines Jernej Barbic University of Southern California Hermite Splines Bezier Splines Catmull-Rom Splines Other Cubic Splines [Angel Ch 12.4-12.12] Roller coaster
CSCI 420 Computer Graphics Lecture 8 Splines Jernej Barbic University of Southern California Hermite Splines Bezier Splines Catmull-Rom Splines Other Cubic Splines [Angel Ch 12.4-12.12] Roller coaster
Bézier Splines. B-Splines. B-Splines. CS 475 / CS 675 Computer Graphics. Lecture 14 : Modelling Curves 3 B-Splines. n i t i 1 t n i. J n,i.
 Bézier Splines CS 475 / CS 675 Computer Graphics Lecture 14 : Modelling Curves 3 n P t = B i J n,i t with 0 t 1 J n, i t = i=0 n i t i 1 t n i No local control. Degree restricted by the control polygon.
Bézier Splines CS 475 / CS 675 Computer Graphics Lecture 14 : Modelling Curves 3 n P t = B i J n,i t with 0 t 1 J n, i t = i=0 n i t i 1 t n i No local control. Degree restricted by the control polygon.
CS 475 / CS Computer Graphics. Modelling Curves 3 - B-Splines
 CS 475 / CS 675 - Computer Graphics Modelling Curves 3 - Bézier Splines n P t = i=0 No local control. B i J n,i t with 0 t 1 J n,i t = n i t i 1 t n i Degree restricted by the control polygon. http://www.cs.mtu.edu/~shene/courses/cs3621/notes/spline/bezier/bezier-move-ct-pt.html
CS 475 / CS 675 - Computer Graphics Modelling Curves 3 - Bézier Splines n P t = i=0 No local control. B i J n,i t with 0 t 1 J n,i t = n i t i 1 t n i Degree restricted by the control polygon. http://www.cs.mtu.edu/~shene/courses/cs3621/notes/spline/bezier/bezier-move-ct-pt.html
Computer Graphics Curves and Surfaces. Matthias Teschner
 Computer Graphics Curves and Surfaces Matthias Teschner Outline Introduction Polynomial curves Bézier curves Matrix notation Curve subdivision Differential curve properties Piecewise polynomial curves
Computer Graphics Curves and Surfaces Matthias Teschner Outline Introduction Polynomial curves Bézier curves Matrix notation Curve subdivision Differential curve properties Piecewise polynomial curves
2D Spline Curves. CS 4620 Lecture 18
 2D Spline Curves CS 4620 Lecture 18 2014 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes that is, without discontinuities So far we can make things with corners (lines,
2D Spline Curves CS 4620 Lecture 18 2014 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes that is, without discontinuities So far we can make things with corners (lines,
Lecture IV Bézier Curves
 Lecture IV Bézier Curves Why Curves? Why Curves? Why Curves? Why Curves? Why Curves? Linear (flat) Curved Easier More pieces Looks ugly Complicated Fewer pieces Looks smooth What is a curve? Intuitively:
Lecture IV Bézier Curves Why Curves? Why Curves? Why Curves? Why Curves? Why Curves? Linear (flat) Curved Easier More pieces Looks ugly Complicated Fewer pieces Looks smooth What is a curve? Intuitively:
Parametric Curves. University of Texas at Austin CS384G - Computer Graphics
 Parametric Curves University of Texas at Austin CS384G - Computer Graphics Fall 2010 Don Fussell Parametric Representations 3 basic representation strategies: Explicit: y = mx + b Implicit: ax + by + c
Parametric Curves University of Texas at Austin CS384G - Computer Graphics Fall 2010 Don Fussell Parametric Representations 3 basic representation strategies: Explicit: y = mx + b Implicit: ax + by + c
Parametric Curves. University of Texas at Austin CS384G - Computer Graphics Fall 2010 Don Fussell
 Parametric Curves University of Texas at Austin CS384G - Computer Graphics Fall 2010 Don Fussell Parametric Representations 3 basic representation strategies: Explicit: y = mx + b Implicit: ax + by + c
Parametric Curves University of Texas at Austin CS384G - Computer Graphics Fall 2010 Don Fussell Parametric Representations 3 basic representation strategies: Explicit: y = mx + b Implicit: ax + by + c
Know it. Control points. B Spline surfaces. Implicit surfaces
 Know it 15 B Spline Cur 14 13 12 11 Parametric curves Catmull clark subdivision Parametric surfaces Interpolating curves 10 9 8 7 6 5 4 3 2 Control points B Spline surfaces Implicit surfaces Bezier surfaces
Know it 15 B Spline Cur 14 13 12 11 Parametric curves Catmull clark subdivision Parametric surfaces Interpolating curves 10 9 8 7 6 5 4 3 2 Control points B Spline surfaces Implicit surfaces Bezier surfaces
2D Spline Curves. CS 4620 Lecture 13
 2D Spline Curves CS 4620 Lecture 13 2008 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes [Boeing] that is, without discontinuities So far we can make things with corners
2D Spline Curves CS 4620 Lecture 13 2008 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes [Boeing] that is, without discontinuities So far we can make things with corners
Curves. Computer Graphics CSE 167 Lecture 11
 Curves Computer Graphics CSE 167 Lecture 11 CSE 167: Computer graphics Polynomial Curves Polynomial functions Bézier Curves Drawing Bézier curves Piecewise Bézier curves Based on slides courtesy of Jurgen
Curves Computer Graphics CSE 167 Lecture 11 CSE 167: Computer graphics Polynomial Curves Polynomial functions Bézier Curves Drawing Bézier curves Piecewise Bézier curves Based on slides courtesy of Jurgen
Parametric curves. Reading. Curves before computers. Mathematical curve representation. CSE 457 Winter Required:
 Reading Required: Angel 10.1-10.3, 10.5.2, 10.6-10.7, 10.9 Parametric curves CSE 457 Winter 2014 Optional Bartels, Beatty, and Barsky. An Introduction to Splines for use in Computer Graphics and Geometric
Reading Required: Angel 10.1-10.3, 10.5.2, 10.6-10.7, 10.9 Parametric curves CSE 457 Winter 2014 Optional Bartels, Beatty, and Barsky. An Introduction to Splines for use in Computer Graphics and Geometric
Bezier Curves, B-Splines, NURBS
 Bezier Curves, B-Splines, NURBS Example Application: Font Design and Display Curved objects are everywhere There is always need for: mathematical fidelity high precision artistic freedom and flexibility
Bezier Curves, B-Splines, NURBS Example Application: Font Design and Display Curved objects are everywhere There is always need for: mathematical fidelity high precision artistic freedom and flexibility
CSE 167: Introduction to Computer Graphics Lecture #11: Bezier Curves. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016
 CSE 167: Introduction to Computer Graphics Lecture #11: Bezier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Project 3 due tomorrow Midterm 2 next
CSE 167: Introduction to Computer Graphics Lecture #11: Bezier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Project 3 due tomorrow Midterm 2 next
Curves and Surfaces 1
 Curves and Surfaces 1 Representation of Curves & Surfaces Polygon Meshes Parametric Cubic Curves Parametric Bi-Cubic Surfaces Quadric Surfaces Specialized Modeling Techniques 2 The Teapot 3 Representing
Curves and Surfaces 1 Representation of Curves & Surfaces Polygon Meshes Parametric Cubic Curves Parametric Bi-Cubic Surfaces Quadric Surfaces Specialized Modeling Techniques 2 The Teapot 3 Representing
Sung-Eui Yoon ( 윤성의 )
") CS480: Computer Graphics Curves and Surfaces Sung-Eui Yoon ( 윤성의 ) Course URL: http://jupiter.kaist.ac.kr/~sungeui/cg Today s Topics Surface representations Smooth curves Subdivision 2 Smooth Curves and
CS480: Computer Graphics Curves and Surfaces Sung-Eui Yoon ( 윤성의 ) Course URL: http://jupiter.kaist.ac.kr/~sungeui/cg Today s Topics Surface representations Smooth curves Subdivision 2 Smooth Curves and
COMPUTER AIDED GEOMETRIC DESIGN. Thomas W. Sederberg
 COMPUTER AIDED GEOMETRIC DESIGN Thomas W. Sederberg January 31, 2011 ii T. W. Sederberg iii Preface This semester is the 24 th time I have taught a course at Brigham Young University titled, Computer Aided
COMPUTER AIDED GEOMETRIC DESIGN Thomas W. Sederberg January 31, 2011 ii T. W. Sederberg iii Preface This semester is the 24 th time I have taught a course at Brigham Young University titled, Computer Aided
08 - Designing Approximating Curves
 08 - Designing Approximating Curves Acknowledgement: Olga Sorkine-Hornung, Alexander Sorkine-Hornung, Ilya Baran Last time Interpolating curves Monomials Lagrange Hermite Different control types Polynomials
08 - Designing Approximating Curves Acknowledgement: Olga Sorkine-Hornung, Alexander Sorkine-Hornung, Ilya Baran Last time Interpolating curves Monomials Lagrange Hermite Different control types Polynomials
Shape Modeling. Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell. CS 523: Computer Graphics, Spring 2011
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
Isoparametric Curve of Quadratic F-Bézier Curve
 J. of the Chosun Natural Science Vol. 6, No. 1 (2013) pp. 46 52 Isoparametric Curve of Quadratic F-Bézier Curve Hae Yeon Park 1 and Young Joon Ahn 2, Abstract In this thesis, we consider isoparametric
J. of the Chosun Natural Science Vol. 6, No. 1 (2013) pp. 46 52 Isoparametric Curve of Quadratic F-Bézier Curve Hae Yeon Park 1 and Young Joon Ahn 2, Abstract In this thesis, we consider isoparametric
CGT 581 G Geometric Modeling Curves
 CGT 581 G Geometric Modeling Curves Bedrich Benes, Ph.D. Purdue University Department of Computer Graphics Technology Curves What is a curve? Mathematical definition 1) The continuous image of an interval
CGT 581 G Geometric Modeling Curves Bedrich Benes, Ph.D. Purdue University Department of Computer Graphics Technology Curves What is a curve? Mathematical definition 1) The continuous image of an interval
Computer Graphics CS 543 Lecture 13a Curves, Tesselation/Geometry Shaders & Level of Detail
 Computer Graphics CS 54 Lecture 1a Curves, Tesselation/Geometry Shaders & Level of Detail Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) So Far Dealt with straight lines
Computer Graphics CS 54 Lecture 1a Curves, Tesselation/Geometry Shaders & Level of Detail Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) So Far Dealt with straight lines
Computergrafik. Matthias Zwicker Universität Bern Herbst 2016
 Computergrafik Matthias Zwicker Universität Bern Herbst 2016 Today Curves NURBS Surfaces Parametric surfaces Bilinear patch Bicubic Bézier patch Advanced surface modeling 2 Piecewise Bézier curves Each
Computergrafik Matthias Zwicker Universität Bern Herbst 2016 Today Curves NURBS Surfaces Parametric surfaces Bilinear patch Bicubic Bézier patch Advanced surface modeling 2 Piecewise Bézier curves Each
Intro to Curves Week 4, Lecture 7
 CS 430/536 Computer Graphics I Intro to Curves Week 4, Lecture 7 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel University
CS 430/536 Computer Graphics I Intro to Curves Week 4, Lecture 7 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel University
Rational Bezier Curves
 Rational Bezier Curves Use of homogeneous coordinates Rational spline curve: define a curve in one higher dimension space, project it down on the homogenizing variable Mathematical formulation: n P(u)
Rational Bezier Curves Use of homogeneous coordinates Rational spline curve: define a curve in one higher dimension space, project it down on the homogenizing variable Mathematical formulation: n P(u)
Intro to Curves Week 1, Lecture 2
 CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University Outline Math review Introduction to 2D curves
CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University Outline Math review Introduction to 2D curves
Central issues in modelling
 Central issues in modelling Construct families of curves, surfaces and volumes that can represent common objects usefully; are easy to interact with; interaction includes: manual modelling; fitting to
Central issues in modelling Construct families of curves, surfaces and volumes that can represent common objects usefully; are easy to interact with; interaction includes: manual modelling; fitting to
Computergrafik. Matthias Zwicker. Herbst 2010
 Computergrafik Matthias Zwicker Universität Bern Herbst 2010 Today Curves NURBS Surfaces Parametric surfaces Bilinear patch Bicubic Bézier patch Advanced surface modeling Piecewise Bézier curves Each segment
Computergrafik Matthias Zwicker Universität Bern Herbst 2010 Today Curves NURBS Surfaces Parametric surfaces Bilinear patch Bicubic Bézier patch Advanced surface modeling Piecewise Bézier curves Each segment
Space deformation Free-form deformation Deformation control Examples: twisting, bending, tapering
 Deformation Beyond rigid body motion (e.g. translation, rotation) Extremely valuable for both modeling and rendering Applications { animation, design, visualization { engineering, medicine { education,
Deformation Beyond rigid body motion (e.g. translation, rotation) Extremely valuable for both modeling and rendering Applications { animation, design, visualization { engineering, medicine { education,
A New Class of Quasi-Cubic Trigonometric Bezier Curve and Surfaces
 A New Class of Quasi-Cubic Trigonometric Bezier Curve and Surfaces Mridula Dube 1, Urvashi Mishra 2 1 Department of Mathematics and Computer Science, R.D. University, Jabalpur, Madhya Pradesh, India 2
A New Class of Quasi-Cubic Trigonometric Bezier Curve and Surfaces Mridula Dube 1, Urvashi Mishra 2 1 Department of Mathematics and Computer Science, R.D. University, Jabalpur, Madhya Pradesh, India 2
CSE 167: Introduction to Computer Graphics Lecture #13: Curves. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2017
 CSE 167: Introduction to Computer Graphics Lecture #13: Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2017 Announcements Project 4 due Monday Nov 27 at 2pm Next Tuesday:
CSE 167: Introduction to Computer Graphics Lecture #13: Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2017 Announcements Project 4 due Monday Nov 27 at 2pm Next Tuesday:
CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2
 CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 Outline Math review Introduction to 2D curves
CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 Outline Math review Introduction to 2D curves
GL9: Engineering Communications. GL9: CAD techniques. Curves Surfaces Solids Techniques
 436-105 Engineering Communications GL9:1 GL9: CAD techniques Curves Surfaces Solids Techniques Parametric curves GL9:2 x = a 1 + b 1 u + c 1 u 2 + d 1 u 3 + y = a 2 + b 2 u + c 2 u 2 + d 2 u 3 + z = a
436-105 Engineering Communications GL9:1 GL9: CAD techniques Curves Surfaces Solids Techniques Parametric curves GL9:2 x = a 1 + b 1 u + c 1 u 2 + d 1 u 3 + y = a 2 + b 2 u + c 2 u 2 + d 2 u 3 + z = a
Remark. Jacobs University Visualization and Computer Graphics Lab : ESM4A - Numerical Methods 331
 Remark Reconsidering the motivating example, we observe that the derivatives are typically not given by the problem specification. However, they can be estimated in a pre-processing step. A good estimate
Remark Reconsidering the motivating example, we observe that the derivatives are typically not given by the problem specification. However, they can be estimated in a pre-processing step. A good estimate
Information Coding / Computer Graphics, ISY, LiTH. Splines
 28(69) Splines Originally a drafting tool to create a smooth curve In computer graphics: a curve built from sections, each described by a 2nd or 3rd degree polynomial. Very common in non-real-time graphics,
28(69) Splines Originally a drafting tool to create a smooth curve In computer graphics: a curve built from sections, each described by a 2nd or 3rd degree polynomial. Very common in non-real-time graphics,
LECTURE #6. Geometric Modelling for Engineering Applications. Geometric modeling for engineering applications
 LECTURE #6 Geometric modeling for engineering applications Geometric Modelling for Engineering Applications Introduction to modeling Geometric modeling Curve representation Hermite curve Bezier curve B-spline
LECTURE #6 Geometric modeling for engineering applications Geometric Modelling for Engineering Applications Introduction to modeling Geometric modeling Curve representation Hermite curve Bezier curve B-spline
An introduction to interpolation and splines
 An introduction to interpolation and splines Kenneth H. Carpenter, EECE KSU November 22, 1999 revised November 20, 2001, April 24, 2002, April 14, 2004 1 Introduction Suppose one wishes to draw a curve
An introduction to interpolation and splines Kenneth H. Carpenter, EECE KSU November 22, 1999 revised November 20, 2001, April 24, 2002, April 14, 2004 1 Introduction Suppose one wishes to draw a curve
Dgp _ lecture 2. Curves
 Dgp _ lecture 2 Curves Questions? This lecture will be asking questions about curves, their Relationship to surfaces, and how they are used and controlled. Topics of discussion will be: Free form Curves
Dgp _ lecture 2 Curves Questions? This lecture will be asking questions about curves, their Relationship to surfaces, and how they are used and controlled. Topics of discussion will be: Free form Curves
PS Geometric Modeling Homework Assignment Sheet I (Due 20-Oct-2017)
") Homework Assignment Sheet I (Due 20-Oct-2017) Assignment 1 Let n N and A be a finite set of cardinality n = A. By definition, a permutation of A is a bijective function from A to A. Prove that there exist
Homework Assignment Sheet I (Due 20-Oct-2017) Assignment 1 Let n N and A be a finite set of cardinality n = A. By definition, a permutation of A is a bijective function from A to A. Prove that there exist
B-spline Curves. Smoother than other curve forms
 Curves and Surfaces B-spline Curves These curves are approximating rather than interpolating curves. The curves come close to, but may not actually pass through, the control points. Usually used as multiple,
Curves and Surfaces B-spline Curves These curves are approximating rather than interpolating curves. The curves come close to, but may not actually pass through, the control points. Usually used as multiple,
COMP3421. Global Lighting Part 2: Radiosity
 COMP3421 Global Lighting Part 2: Radiosity Recap: Global Lighting The lighting equation we looked at earlier only handled direct lighting from sources: We added an ambient fudge term to account for all
COMP3421 Global Lighting Part 2: Radiosity Recap: Global Lighting The lighting equation we looked at earlier only handled direct lighting from sources: We added an ambient fudge term to account for all
Fathi El-Yafi Project and Software Development Manager Engineering Simulation
 An Introduction to Geometry Design Algorithms Fathi El-Yafi Project and Software Development Manager Engineering Simulation 1 Geometry: Overview Geometry Basics Definitions Data Semantic Topology Mathematics
An Introduction to Geometry Design Algorithms Fathi El-Yafi Project and Software Development Manager Engineering Simulation 1 Geometry: Overview Geometry Basics Definitions Data Semantic Topology Mathematics
Representing Curves Part II. Foley & Van Dam, Chapter 11
 Representing Curves Part II Foley & Van Dam, Chapter 11 Representing Curves Polynomial Splines Bezier Curves Cardinal Splines Uniform, non rational B-Splines Drawing Curves Applications of Bezier splines
Representing Curves Part II Foley & Van Dam, Chapter 11 Representing Curves Polynomial Splines Bezier Curves Cardinal Splines Uniform, non rational B-Splines Drawing Curves Applications of Bezier splines
Until now we have worked with flat entities such as lines and flat polygons. Fit well with graphics hardware Mathematically simple
 Curves and surfaces Escaping Flatland Until now we have worked with flat entities such as lines and flat polygons Fit well with graphics hardware Mathematically simple But the world is not composed of
Curves and surfaces Escaping Flatland Until now we have worked with flat entities such as lines and flat polygons Fit well with graphics hardware Mathematically simple But the world is not composed of
Spline Surfaces, Subdivision Surfaces
 CS-C3100 Computer Graphics Spline Surfaces, Subdivision Surfaces vectorportal.com Trivia Assignment 1 due this Sunday! Feedback on the starter code, difficulty, etc., much appreciated Put in your README
CS-C3100 Computer Graphics Spline Surfaces, Subdivision Surfaces vectorportal.com Trivia Assignment 1 due this Sunday! Feedback on the starter code, difficulty, etc., much appreciated Put in your README
CS130 : Computer Graphics Curves (cont.) Tamar Shinar Computer Science & Engineering UC Riverside
 Tamar Shinar Computer Science & Engineering UC Riverside") CS130 : Computer Graphics Curves (cont.) Tamar Shinar Computer Science & Engineering UC Riverside Blending Functions Blending functions are more convenient basis than monomial basis canonical form (monomial
CS130 : Computer Graphics Curves (cont.) Tamar Shinar Computer Science & Engineering UC Riverside Blending Functions Blending functions are more convenient basis than monomial basis canonical form (monomial
Curves D.A. Forsyth, with slides from John Hart
 Curves D.A. Forsyth, with slides from John Hart Central issues in modelling Construct families of curves, surfaces and volumes that can represent common objects usefully; are easy to interact with; interaction
Curves D.A. Forsyth, with slides from John Hart Central issues in modelling Construct families of curves, surfaces and volumes that can represent common objects usefully; are easy to interact with; interaction
Curves and Curved Surfaces. Adapted by FFL from CSE167: Computer Graphics Instructor: Ronen Barzel UCSD, Winter 2006
 Curves and Curved Surfaces Adapted by FFL from CSE167: Computer Graphics Instructor: Ronen Barzel UCSD, Winter 2006 Outline for today Summary of Bézier curves Piecewise-cubic curves, B-splines Surface
Curves and Curved Surfaces Adapted by FFL from CSE167: Computer Graphics Instructor: Ronen Barzel UCSD, Winter 2006 Outline for today Summary of Bézier curves Piecewise-cubic curves, B-splines Surface
COMPUTER AIDED ENGINEERING DESIGN (BFF2612)
") COMPUTER AIDED ENGINEERING DESIGN (BFF2612) BASIC MATHEMATICAL CONCEPTS IN CAED by Dr. Mohd Nizar Mhd Razali Faculty of Manufacturing Engineering mnizar@ump.edu.my COORDINATE SYSTEM y+ y+ z+ z+ x+ RIGHT
COMPUTER AIDED ENGINEERING DESIGN (BFF2612) BASIC MATHEMATICAL CONCEPTS IN CAED by Dr. Mohd Nizar Mhd Razali Faculty of Manufacturing Engineering mnizar@ump.edu.my COORDINATE SYSTEM y+ y+ z+ z+ x+ RIGHT
Introduction to Computer Graphics
 Introduction to Computer Graphics 2016 Spring National Cheng Kung University Instructors: Min-Chun Hu 胡敏君 Shih-Chin Weng 翁士欽 ( 西基電腦動畫 ) Data Representation Curves and Surfaces Limitations of Polygons Inherently
Introduction to Computer Graphics 2016 Spring National Cheng Kung University Instructors: Min-Chun Hu 胡敏君 Shih-Chin Weng 翁士欽 ( 西基電腦動畫 ) Data Representation Curves and Surfaces Limitations of Polygons Inherently
Curves and Surfaces Computer Graphics I Lecture 9
 15-462 Computer Graphics I Lecture 9 Curves and Surfaces Parametric Representations Cubic Polynomial Forms Hermite Curves Bezier Curves and Surfaces [Angel 10.1-10.6] February 19, 2002 Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 9 Curves and Surfaces Parametric Representations Cubic Polynomial Forms Hermite Curves Bezier Curves and Surfaces [Angel 10.1-10.6] February 19, 2002 Frank Pfenning Carnegie
Geometric Modeling of Curves
 Curves Locus of a point moving with one degree of freedom Locus of a one-dimensional parameter family of point Mathematically defined using: Explicit equations Implicit equations Parametric equations (Hermite,
Curves Locus of a point moving with one degree of freedom Locus of a one-dimensional parameter family of point Mathematically defined using: Explicit equations Implicit equations Parametric equations (Hermite,
Bezier Curves. An Introduction. Detlef Reimers
 Bezier Curves An Introduction Detlef Reimers detlefreimers@gmx.de http://detlefreimers.de September 1, 2011 Chapter 1 Bezier Curve Basics 1.1 Linear Interpolation This section will give you a basic introduction
Bezier Curves An Introduction Detlef Reimers detlefreimers@gmx.de http://detlefreimers.de September 1, 2011 Chapter 1 Bezier Curve Basics 1.1 Linear Interpolation This section will give you a basic introduction
Introduction p. 1 What Is Geometric Modeling? p. 1 Computer-aided geometric design Solid modeling Algebraic geometry Computational geometry
 Introduction p. 1 What Is Geometric Modeling? p. 1 Computer-aided geometric design Solid modeling Algebraic geometry Computational geometry Representation Ab initio design Rendering Solid modelers Kinematic
Introduction p. 1 What Is Geometric Modeling? p. 1 Computer-aided geometric design Solid modeling Algebraic geometry Computational geometry Representation Ab initio design Rendering Solid modelers Kinematic
Review 1. Richard Koch. April 23, 2005
 Review Richard Koch April 3, 5 Curves From the chapter on curves, you should know. the formula for arc length in section.;. the definition of T (s), κ(s), N(s), B(s) in section.4. 3. the fact that κ =
Review Richard Koch April 3, 5 Curves From the chapter on curves, you should know. the formula for arc length in section.;. the definition of T (s), κ(s), N(s), B(s) in section.4. 3. the fact that κ =
Parameterization of triangular meshes
 Parameterization of triangular meshes Michael S. Floater November 10, 2009 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to
Parameterization of triangular meshes Michael S. Floater November 10, 2009 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to
Topic 5.1: Line Elements and Scalar Line Integrals. Textbook: Section 16.2
 Topic 5.1: Line Elements and Scalar Line Integrals Textbook: Section 16.2 Warm-Up: Derivatives of Vector Functions Suppose r(t) = x(t) î + y(t) ĵ + z(t) ˆk parameterizes a curve C. The vector: is: r (t)
Topic 5.1: Line Elements and Scalar Line Integrals Textbook: Section 16.2 Warm-Up: Derivatives of Vector Functions Suppose r(t) = x(t) î + y(t) ĵ + z(t) ˆk parameterizes a curve C. The vector: is: r (t)
Advanced Modeling 2. Katja Bühler, Andrej Varchola, Eduard Gröller. March 24, x(t) z(t)
 z(t)") Advanced Modeling 2 Katja Bühler, Andrej Varchola, Eduard Gröller March 24, 2014 1 Parametric Representations A parametric curve in E 3 is given by x(t) c : c(t) = y(t) ; t I = [a, b] R z(t) where x(t),
Advanced Modeling 2 Katja Bühler, Andrej Varchola, Eduard Gröller March 24, 2014 1 Parametric Representations A parametric curve in E 3 is given by x(t) c : c(t) = y(t) ; t I = [a, b] R z(t) where x(t),
Interactive Graphics. Lecture 9: Introduction to Spline Curves. Interactive Graphics Lecture 9: Slide 1
 Interactive Graphics Lecture 9: Introduction to Spline Curves Interactive Graphics Lecture 9: Slide 1 Interactive Graphics Lecture 13: Slide 2 Splines The word spline comes from the ship building trade
Interactive Graphics Lecture 9: Introduction to Spline Curves Interactive Graphics Lecture 9: Slide 1 Interactive Graphics Lecture 13: Slide 2 Splines The word spline comes from the ship building trade
Computer Graphics Spline and Surfaces
 Computer Graphics 2016 10. Spline and Surfaces Hongxin Zhang State Key Lab of CAD&CG, Zhejiang University 2016-12-05 Outline! Introduction! Bézier curve and surface! NURBS curve and surface! subdivision
Computer Graphics 2016 10. Spline and Surfaces Hongxin Zhang State Key Lab of CAD&CG, Zhejiang University 2016-12-05 Outline! Introduction! Bézier curve and surface! NURBS curve and surface! subdivision
An Introduction to Bezier Curves, B-Splines, and Tensor Product Surfaces with History and Applications
 An Introduction to Bezier Curves, B-Splines, and Tensor Product Surfaces with History and Applications Benjamin T. Bertka University of California Santa Cruz May 30 th, 2008 1 History Before computer graphics
An Introduction to Bezier Curves, B-Splines, and Tensor Product Surfaces with History and Applications Benjamin T. Bertka University of California Santa Cruz May 30 th, 2008 1 History Before computer graphics
Spline Curves. Spline Curves. Prof. Dr. Hans Hagen Algorithmic Geometry WS 2013/2014 1
 Spline Curves Prof. Dr. Hans Hagen Algorithmic Geometry WS 2013/2014 1 Problem: In the previous chapter, we have seen that interpolating polynomials, especially those of high degree, tend to produce strong
Spline Curves Prof. Dr. Hans Hagen Algorithmic Geometry WS 2013/2014 1 Problem: In the previous chapter, we have seen that interpolating polynomials, especially those of high degree, tend to produce strong
CS337 INTRODUCTION TO COMPUTER GRAPHICS. Describing Shapes. Constructing Objects in Computer Graphics. Bin Sheng Representing Shape 9/20/16 1/15
 Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Name: Date: 1. Match the equation with its graph. Page 1
 Name: Date: 1. Match the equation with its graph. y 6x A) C) Page 1 D) E) Page . Match the equation with its graph. ( x3) ( y3) A) C) Page 3 D) E) Page 4 3. Match the equation with its graph. ( x ) y 1
Name: Date: 1. Match the equation with its graph. y 6x A) C) Page 1 D) E) Page . Match the equation with its graph. ( x3) ( y3) A) C) Page 3 D) E) Page 4 3. Match the equation with its graph. ( x ) y 1
Parameterization. Michael S. Floater. November 10, 2011
 Parameterization Michael S. Floater November 10, 2011 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to generate from point
Parameterization Michael S. Floater November 10, 2011 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to generate from point
Shape Representation Basic problem We make pictures of things How do we describe those things? Many of those things are shapes Other things include
 Shape Representation Basic problem We make pictures of things How do we describe those things? Many of those things are shapes Other things include motion, behavior Graphics is a form of simulation and
Shape Representation Basic problem We make pictures of things How do we describe those things? Many of those things are shapes Other things include motion, behavior Graphics is a form of simulation and
Need for Parametric Equations
 Curves and Surfaces Curves and Surfaces Need for Parametric Equations Affine Combinations Bernstein Polynomials Bezier Curves and Surfaces Continuity when joining curves B Spline Curves and Surfaces Need
Curves and Surfaces Curves and Surfaces Need for Parametric Equations Affine Combinations Bernstein Polynomials Bezier Curves and Surfaces Continuity when joining curves B Spline Curves and Surfaces Need
CS123 INTRODUCTION TO COMPUTER GRAPHICS. Describing Shapes. Constructing Objects in Computer Graphics 1/15
 Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Surfaces for CAGD. FSP Tutorial. FSP-Seminar, Graz, November
 Surfaces for CAGD FSP Tutorial FSP-Seminar, Graz, November 2005 1 Tensor Product Surfaces Given: two curve schemes (Bézier curves or B splines): I: x(u) = m i=0 F i(u)b i, u [a, b], II: x(v) = n j=0 G
Surfaces for CAGD FSP Tutorial FSP-Seminar, Graz, November 2005 1 Tensor Product Surfaces Given: two curve schemes (Bézier curves or B splines): I: x(u) = m i=0 F i(u)b i, u [a, b], II: x(v) = n j=0 G
Advanced Graphics. Beziers, B-splines, and NURBS. Alex Benton, University of Cambridge Supported in part by Google UK, Ltd
 Advanced Graphics Beziers, B-splines, and NURBS Alex Benton, University of Cambridge A.Benton@damtp.cam.ac.uk Supported in part by Google UK, Ltd Bezier splines, B-Splines, and NURBS Expensive products
Advanced Graphics Beziers, B-splines, and NURBS Alex Benton, University of Cambridge A.Benton@damtp.cam.ac.uk Supported in part by Google UK, Ltd Bezier splines, B-Splines, and NURBS Expensive products
CS3621 Midterm Solution (Fall 2005) 150 points
 150 points") CS362 Midterm Solution Fall 25. Geometric Transformation CS362 Midterm Solution (Fall 25) 5 points (a) [5 points] Find the 2D transformation matrix for the reflection about the y-axis transformation (i.e.,
CS362 Midterm Solution Fall 25. Geometric Transformation CS362 Midterm Solution (Fall 25) 5 points (a) [5 points] Find the 2D transformation matrix for the reflection about the y-axis transformation (i.e.,
13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY
 13.472J/1.128J/2.158J/16.94J COMPUTATIONAL GEOMETRY Lectures 4 and 5 N. M. Patrikalakis Massachusetts Institute of Technology Cambridge, MA 2139-437, USA Copyright c 23 Massachusetts Institute of Technology
13.472J/1.128J/2.158J/16.94J COMPUTATIONAL GEOMETRY Lectures 4 and 5 N. M. Patrikalakis Massachusetts Institute of Technology Cambridge, MA 2139-437, USA Copyright c 23 Massachusetts Institute of Technology
Curves and Surfaces Computer Graphics I Lecture 10
 15-462 Computer Graphics I Lecture 10 Curves and Surfaces Parametric Representations Cubic Polynomial Forms Hermite Curves Bezier Curves and Surfaces [Angel 10.1-10.6] September 30, 2003 Doug James Carnegie
15-462 Computer Graphics I Lecture 10 Curves and Surfaces Parametric Representations Cubic Polynomial Forms Hermite Curves Bezier Curves and Surfaces [Angel 10.1-10.6] September 30, 2003 Doug James Carnegie
American International Journal of Research in Science, Technology, Engineering & Mathematics
 American International Journal of Research in Science, Technology, Engineering & Mathematics Available online at http://www.iasir.net ISSN (Print): 38-349, ISSN (Online): 38-3580, ISSN (CD-ROM): 38-369
American International Journal of Research in Science, Technology, Engineering & Mathematics Available online at http://www.iasir.net ISSN (Print): 38-349, ISSN (Online): 38-3580, ISSN (CD-ROM): 38-369
2Surfaces. Design with Bézier Surfaces
 You don t see something until you have the right metaphor to let you perceive it. James Gleick Surfaces Design with Bézier Surfaces S : r(u, v) = Bézier surfaces represent an elegant way to build a surface,
You don t see something until you have the right metaphor to let you perceive it. James Gleick Surfaces Design with Bézier Surfaces S : r(u, v) = Bézier surfaces represent an elegant way to build a surface,
Computer Graphics Splines and Curves
 Computer Graphics 2015 9. Splines and Curves Hongxin Zhang State Key Lab of CAD&CG, Zhejiang University 2015-11-23 About homework 3 - an alternative solution with WebGL - links: - WebGL lessons http://learningwebgl.com/blog/?page_id=1217
Computer Graphics 2015 9. Splines and Curves Hongxin Zhang State Key Lab of CAD&CG, Zhejiang University 2015-11-23 About homework 3 - an alternative solution with WebGL - links: - WebGL lessons http://learningwebgl.com/blog/?page_id=1217
Surface Modeling. Polygon Tables. Types: Generating models: Polygon Surfaces. Polygon surfaces Curved surfaces Volumes. Interactive Procedural
 Surface Modeling Types: Polygon surfaces Curved surfaces Volumes Generating models: Interactive Procedural Polygon Tables We specify a polygon surface with a set of vertex coordinates and associated attribute
Surface Modeling Types: Polygon surfaces Curved surfaces Volumes Generating models: Interactive Procedural Polygon Tables We specify a polygon surface with a set of vertex coordinates and associated attribute
Approximation of 3D-Parametric Functions by Bicubic B-spline Functions
 International Journal of Mathematical Modelling & Computations Vol. 02, No. 03, 2012, 211-220 Approximation of 3D-Parametric Functions by Bicubic B-spline Functions M. Amirfakhrian a, a Department of Mathematics,
International Journal of Mathematical Modelling & Computations Vol. 02, No. 03, 2012, 211-220 Approximation of 3D-Parametric Functions by Bicubic B-spline Functions M. Amirfakhrian a, a Department of Mathematics,
The goal is the definition of points with numbers and primitives with equations or functions. The definition of points with numbers requires a
 The goal is the definition of points with numbers and primitives with equations or functions. The definition of points with numbers requires a coordinate system and then the measuring of the point with
The goal is the definition of points with numbers and primitives with equations or functions. The definition of points with numbers requires a coordinate system and then the measuring of the point with
The Essentials of CAGD
 The Essentials of CAGD Chapter 6: Bézier Patches Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2 Farin & Hansford The
The Essentials of CAGD Chapter 6: Bézier Patches Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2 Farin & Hansford The
Shape Control of Cubic H-Bézier Curve by Moving Control Point
 Journal of Information & Computational Science 4: 2 (2007) 871 878 Available at http://www.joics.com Shape Control of Cubic H-Bézier Curve by Moving Control Point Hongyan Zhao a,b, Guojin Wang a,b, a Department
Journal of Information & Computational Science 4: 2 (2007) 871 878 Available at http://www.joics.com Shape Control of Cubic H-Bézier Curve by Moving Control Point Hongyan Zhao a,b, Guojin Wang a,b, a Department
OpenGL Graphics System. 2D Graphics Primitives. Drawing 2D Graphics Primitives. 2D Graphics Primitives. Mathematical 2D Primitives.
 D Graphics Primitives Eye sees Displays - CRT/LCD Frame buffer - Addressable pixel array (D) Graphics processor s main function is to map application model (D) by projection on to D primitives: points,
D Graphics Primitives Eye sees Displays - CRT/LCD Frame buffer - Addressable pixel array (D) Graphics processor s main function is to map application model (D) by projection on to D primitives: points,
Properties of Blending Functions
 Chapter 5 Properties of Blending Functions We have just studied how the Bernstein polynomials serve very nicely as blending functions. We have noted that a degree n Bézier curve always begins at P 0 and
Chapter 5 Properties of Blending Functions We have just studied how the Bernstein polynomials serve very nicely as blending functions. We have noted that a degree n Bézier curve always begins at P 0 and
Computer Aided Geometric Design
 Brigham Young University BYU ScholarsArchive All Faculty Publications 2012-01-10 Computer Aided Geometric Design Thomas W. Sederberg tom@cs.byu.edu Follow this and additional works at: https://scholarsarchive.byu.edu/facpub
Brigham Young University BYU ScholarsArchive All Faculty Publications 2012-01-10 Computer Aided Geometric Design Thomas W. Sederberg tom@cs.byu.edu Follow this and additional works at: https://scholarsarchive.byu.edu/facpub
Curves, Surfaces and Recursive Subdivision
 Department of Computer Sciences Graphics Fall 25 (Lecture ) Curves, Surfaces and Recursive Subdivision Conics: Curves and Quadrics: Surfaces Implicit form arametric form Rational Bézier Forms Recursive
Department of Computer Sciences Graphics Fall 25 (Lecture ) Curves, Surfaces and Recursive Subdivision Conics: Curves and Quadrics: Surfaces Implicit form arametric form Rational Bézier Forms Recursive
Note on Industrial Applications of Hu s Surface Extension Algorithm
 Note on Industrial Applications of Hu s Surface Extension Algorithm Yu Zang, Yong-Jin Liu, and Yu-Kun Lai Tsinghua National Laboratory for Information Science and Technology, Department of Computer Science
Note on Industrial Applications of Hu s Surface Extension Algorithm Yu Zang, Yong-Jin Liu, and Yu-Kun Lai Tsinghua National Laboratory for Information Science and Technology, Department of Computer Science
Free-Form Deformation (FFD)
") Chapter 14 Free-Form Deformation (FFD) Free-form deformation (FFD) is a technique for manipulating any shape in a free-form manner. Pierre Bézier used this idea to manipulate large numbers of control points
Chapter 14 Free-Form Deformation (FFD) Free-form deformation (FFD) is a technique for manipulating any shape in a free-form manner. Pierre Bézier used this idea to manipulate large numbers of control points
CSE 167: Introduction to Computer Graphics Lecture 12: Bézier Curves. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013
 CSE 167: Introduction to Computer Graphics Lecture 12: Bézier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Announcements Homework assignment 5 due tomorrow, Nov
CSE 167: Introduction to Computer Graphics Lecture 12: Bézier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Announcements Homework assignment 5 due tomorrow, Nov
OUTLINE. Quadratic Bezier Curves Cubic Bezier Curves
 BEZIER CURVES 1 OUTLINE Introduce types of curves and surfaces Introduce the types of curves Interpolating Hermite Bezier B-spline Quadratic Bezier Curves Cubic Bezier Curves 2 ESCAPING FLATLAND Until
BEZIER CURVES 1 OUTLINE Introduce types of curves and surfaces Introduce the types of curves Interpolating Hermite Bezier B-spline Quadratic Bezier Curves Cubic Bezier Curves 2 ESCAPING FLATLAND Until
A second order algorithm for orthogonal projection onto curves and surfaces
 A second order algorithm for orthogonal projection onto curves and surfaces Shi-min Hu and Johannes Wallner Dept. of Computer Science and Technology, Tsinghua University, Beijing, China shimin@tsinghua.edu.cn;
A second order algorithm for orthogonal projection onto curves and surfaces Shi-min Hu and Johannes Wallner Dept. of Computer Science and Technology, Tsinghua University, Beijing, China shimin@tsinghua.edu.cn;
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry