Introduction to Kinematic Synthesis of Mechanisms
|
|
|
- Randolph Dickerson
- 5 years ago
- Views:
Transcription
1 Introduction to Kinematic Synthesis of Mechanisms J. M. McCarthy and B. Roth

2 Watt: Drawing a Straight Line James Watt: Though I am not over anxious after fame, yet I am more proud of the parallel motion than of any other mechanical invention I have ever made. Watt s straight-line linkage Dimensions of Watt s linkage Use in high performance rear suspensions




3 Four-bar Linkage Design Spare tire deployment
4 More Four-bar Examples




5 Long travel suspension Six-bar Linkage Design

6 Walking Machines Theo Jansen designed an eight-bar linkage for the legs of his Strandbeest We can design a six-bar linkage with a similar walking gait j x y
7 Different Gaits Once the general homotopy is solved, parameter homotopies execute rapidly. Here are results for other foot trajectories Cognate linkages


8 Prototype One of the leg designs was manufactured as a compliant linkage Lasercut polypropylene Used to build a robot about 30 cm in length
=(x(t), y(t)), has")
 and y(t); 2.")


9 Mechanical Fourier Series 1. A closed parameterized curve, f(t)=(x(t), y(t)), has a Fourier series expansion of the coordinate functions, x(t) and y(t); 2. Scotch yoke mechanisms generate cosine and sine terms, add using a belt and pulleys; 3. Combine the movements of x and y coordinates to draw the curve. D. C. Miller, ``A 32-element Harmonic Synthesizer, Journal of the Franklin Institute, Jan The Heart Curve

10 Trigonometric Plane Curves

11 Epicycles: Coupled Serial Chain The Butterfly mechanism draws the Butterfly curve: Y. Liu and J. M. McCarthy, "Design of Mechanisms to Draw Trigonometric Plane Curves," ME 322 special Kinematic issue Synthesis Selected of Papers Mechanisms from the IDETC 2016, Journal of Mechanisms and Robotics, April 2017, Vol 9(2). doi: /





12 Manufacturing Prototype


13 A Linkage Writes in Chinese Each of the serial chains is driven by the same input. The system has one degree-of-freedom
14 Mechanical Driven Spatial Chains A TRR spatial chain was selected to model the magpie wing TRR Chain TR Subchain
15 Driving Six-bar Linkages The four target functions and the six-bar linkages that generate them

16 Biomimetic Movement Solutions of the synthesis polynomials for each of the four target functions ψa=fa(ϕ), ψb=fb(ϕ), ψc=fc(ϕ), ψd=fd(ϕ) Binary Driven ψ A ψ B ψ C ψ D Linkage solutions Design Candidates point mechanisms point mechanisms point mechanisms point mechanisms Feasible designs Synthesis computation time (hr) Analysis computation time (hr) As ME many 322 Kinematic as 45x10 Synthesis 6 possible of Mechanisms wing linkage designs.



17 Hovering Wing Movement Balta,M.,Ahmed,K.A.,Wang,P.L.,McCarthy,J.M., and Taha, H. E., Design and manufacturing of flapping wing mechanisms for micro air vehicles. In 58th AIAA/ASCE/AHS/ ASC Structures, Structural Dynamics, and Materials Conference, p


18 Spatial Mechanisms A D O B E F C R. S. Hartenberg and J. Denavit, 1964 Kinematic Synthesis of Linkages, McGraw-Hill, New York.



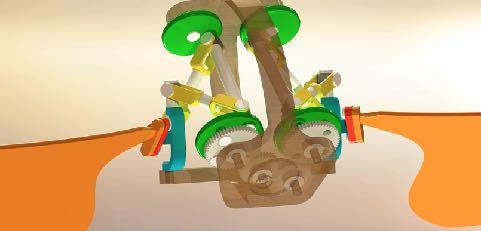
19 Spatial Flapping Wing Mechanism

20 Flapping Wing Mechanism







21 Inventors
22 Summary Kempe s Universality Theorem, proves the existence of a drawing linkage for every algebraic curve, but the construction yields complex systems with hundreds of links for a cubic curve. Kinematic synthesis of robotic systems to draw curves contributes to design innovation. Opportunities are as varied as stroke rehabilitation, disaster relief, vehicle suspensions, and walking and flying robots. Trigonometric cubic Bezier curves can be drawn by four-link coupled serial chains. Thus, a one degree-of-freedom linkage system can sign your name and write cursive Chinese. Spatial Mechanism Synthesis is yielding innovative designs for new applications in areas as diverse as micro-air vehicles and tunnel boring machines.
Optimization of Watt s Six-bar Linkage to Generate Straight and Parallel Leg Motion
 intehweb.com Optimization of Watt s Six-bar Linkage to Generate Straight and Parallel Leg Motion Hamid Mehdigholi and Saeed Akbarnejad Sharif University of Technology mehdi@sharif.ir Abstract: This paper
intehweb.com Optimization of Watt s Six-bar Linkage to Generate Straight and Parallel Leg Motion Hamid Mehdigholi and Saeed Akbarnejad Sharif University of Technology mehdi@sharif.ir Abstract: This paper
Kinematics, Polynomials, and Computers A Brief History
 Kinematics, Polynomials, and Computers A Brief History J. Michael McCarthy Department of Mechanical and Aerospace Engineering University of California, Irvine Irvine, CA 92697 JMR Editorial February 2011
Kinematics, Polynomials, and Computers A Brief History J. Michael McCarthy Department of Mechanical and Aerospace Engineering University of California, Irvine Irvine, CA 92697 JMR Editorial February 2011
Kinematic Synthesis. October 6, 2015 Mark Plecnik
 Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Path Curvature of the Single Flier Eight-Bar Linkage
 Gordon R. Pennock ASME Fellow Associate Professor Edward C. Kinzel Research Assistant School of Mechanical Engineering, Purdue University, West Lafayette, Indiana 47907-2088 Path Curvature of the Single
Gordon R. Pennock ASME Fellow Associate Professor Edward C. Kinzel Research Assistant School of Mechanical Engineering, Purdue University, West Lafayette, Indiana 47907-2088 Path Curvature of the Single
DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS
 DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS ALBA PEREZ Robotics and Automation Laboratory University of California, Irvine Irvine, CA 9697 email: maperez@uci.edu AND J. MICHAEL MCCARTHY Department of Mechanical
DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS ALBA PEREZ Robotics and Automation Laboratory University of California, Irvine Irvine, CA 9697 email: maperez@uci.edu AND J. MICHAEL MCCARTHY Department of Mechanical
Design of a Three-Axis Rotary Platform
 Design of a Three-Axis Rotary Platform William Mendez, Yuniesky Rodriguez, Lee Brady, Sabri Tosunoglu Mechanics and Materials Engineering, Florida International University 10555 W Flagler Street, Miami,
Design of a Three-Axis Rotary Platform William Mendez, Yuniesky Rodriguez, Lee Brady, Sabri Tosunoglu Mechanics and Materials Engineering, Florida International University 10555 W Flagler Street, Miami,
Mechanism Kinematics and Dynamics
 Mechanism Kinematics and Dynamics Final Project 1. The window shield wiper For the window wiper, (1). Select the length of all links such that the wiper tip X p (t) can cover a 120 cm window width. (2).
Mechanism Kinematics and Dynamics Final Project 1. The window shield wiper For the window wiper, (1). Select the length of all links such that the wiper tip X p (t) can cover a 120 cm window width. (2).
OPTIMAL KINEMATIC DESIGN OF A CAR AXLE GUIDING MECHANISM IN MBS SOFTWARE ENVIRONMENT
 OPTIMAL KINEMATIC DESIGN OF A CAR AXLE GUIDING MECHANISM IN MBS SOFTWARE ENVIRONMENT Dr. eng. Cătălin ALEXANDRU Transilvania University of Braşov, calex@unitbv.ro Abstract: This work deals with the optimal
OPTIMAL KINEMATIC DESIGN OF A CAR AXLE GUIDING MECHANISM IN MBS SOFTWARE ENVIRONMENT Dr. eng. Cătălin ALEXANDRU Transilvania University of Braşov, calex@unitbv.ro Abstract: This work deals with the optimal
Mechanism Kinematics and Dynamics
 Mechanism Kinematics and Dynamics Final Project Presentation 10:10-13:00, 12/21 and 12/28 1. The window shield wiper (2) For the window wiper in Fig.1.33 on p.26 of the PPT, (1). Select the length of all
Mechanism Kinematics and Dynamics Final Project Presentation 10:10-13:00, 12/21 and 12/28 1. The window shield wiper (2) For the window wiper in Fig.1.33 on p.26 of the PPT, (1). Select the length of all
Mechanism Design. Four-bar coupler-point curves
 Mechanism Design Four-bar coupler-point curves Four-bar coupler-point curves A coupler is the most interesting link in any linkage. It is in complex motion, and thus points on the coupler can have path
Mechanism Design Four-bar coupler-point curves Four-bar coupler-point curves A coupler is the most interesting link in any linkage. It is in complex motion, and thus points on the coupler can have path
Singularity Analysis of an Extensible Kinematic Architecture: Assur Class N, Order N 1
 David H. Myszka e-mail: dmyszka@udayton.edu Andrew P. Murray e-mail: murray@notes.udayton.edu University of Dayton, Dayton, OH 45469 James P. Schmiedeler The Ohio State University, Columbus, OH 43210 e-mail:
David H. Myszka e-mail: dmyszka@udayton.edu Andrew P. Murray e-mail: murray@notes.udayton.edu University of Dayton, Dayton, OH 45469 James P. Schmiedeler The Ohio State University, Columbus, OH 43210 e-mail:
Lecture 3. Planar Kinematics
 Matthew T. Mason Mechanics of Manipulation Outline Where are we? s 1. Foundations and general concepts. 2.. 3. Spherical and spatial kinematics. Readings etc. The text: By now you should have read Chapter
Matthew T. Mason Mechanics of Manipulation Outline Where are we? s 1. Foundations and general concepts. 2.. 3. Spherical and spatial kinematics. Readings etc. The text: By now you should have read Chapter
Kinematics Fundamentals CREATING OF KINEMATIC CHAINS
 Kinematics Fundamentals CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies the
Kinematics Fundamentals CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies the
Modelling of mechanical system CREATING OF KINEMATIC CHAINS
 Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Structural synthesis of linkages for quadruped biorobot
 IOP onference Series: Materials Science and Engineering PAPER OPE AESS Structural synthesis of linkages for quadruped biorobot legs To cite this article: O Antonescu et al 16 IOP onf. Ser.: Mater. Sci.
IOP onference Series: Materials Science and Engineering PAPER OPE AESS Structural synthesis of linkages for quadruped biorobot legs To cite this article: O Antonescu et al 16 IOP onf. Ser.: Mater. Sci.
Synthesis of Spatial RPRP Loops for a Given Screw System
 Synthesis of Spatial RPRP Loops for a Given Screw System A. Perez-Gracia Institut de Robotica i Informatica Industrial (IRI) UPC/CSIC, Barcelona, Spain and: College of Engineering, Idaho State Univesity,
Synthesis of Spatial RPRP Loops for a Given Screw System A. Perez-Gracia Institut de Robotica i Informatica Industrial (IRI) UPC/CSIC, Barcelona, Spain and: College of Engineering, Idaho State Univesity,
Some algebraic geometry problems arising in the field of mechanism theory. J-P. Merlet INRIA, BP Sophia Antipolis Cedex France
 Some algebraic geometry problems arising in the field of mechanism theory J-P. Merlet INRIA, BP 93 06902 Sophia Antipolis Cedex France Abstract Mechanism theory has always been a favorite field of study
Some algebraic geometry problems arising in the field of mechanism theory J-P. Merlet INRIA, BP 93 06902 Sophia Antipolis Cedex France Abstract Mechanism theory has always been a favorite field of study
Did you ever think that a four hundred year-old spider may be why we study linear relationships today?
 Show Me: Determine if a Function is Linear M8221 Did you ever think that a four hundred year-old spider may be why we study linear relationships today? Supposedly, while lying in bed Rene Descartes noticed
Show Me: Determine if a Function is Linear M8221 Did you ever think that a four hundred year-old spider may be why we study linear relationships today? Supposedly, while lying in bed Rene Descartes noticed
Synthesis of Planar Mechanisms, Part XI: Al-Jazari Quick Return-Motion Mechanism Galal Ali Hassaan Emeritus Professor, Mechanical Design & Production
 Synthesis of Planar Mechanisms, Part XI: Al-Jazari Quick Return-Motion Mechanism Galal Ali Hassaan Emeritus Professor, Mechanical Design & Production Department. Faculty of Engineering, Cairo University,
Synthesis of Planar Mechanisms, Part XI: Al-Jazari Quick Return-Motion Mechanism Galal Ali Hassaan Emeritus Professor, Mechanical Design & Production Department. Faculty of Engineering, Cairo University,
Control of an 8-Legged, 24 DOF, Mechatronic Robot
 Control of an 8-Legged, 24 DOF, Mechatronic Robot Submitted by Brian Lim Youliang Kuvesvaran s/o Paramasivan National Junior College Assoc. Prof. Dr. Francis Malcolm John Nickols Abstract The objective
Control of an 8-Legged, 24 DOF, Mechatronic Robot Submitted by Brian Lim Youliang Kuvesvaran s/o Paramasivan National Junior College Assoc. Prof. Dr. Francis Malcolm John Nickols Abstract The objective
Slider-Cranks as Compatibility Linkages for Parametrizing Center-Point Curves
 David H. Myszka e-mail: dmyszka@udayton.edu Andrew P. Murray e-mail: murray@notes.udayton.edu University of Dayton, Dayton, OH 45469 Slider-Cranks as Compatibility Linkages for Parametrizing Center-Point
David H. Myszka e-mail: dmyszka@udayton.edu Andrew P. Murray e-mail: murray@notes.udayton.edu University of Dayton, Dayton, OH 45469 Slider-Cranks as Compatibility Linkages for Parametrizing Center-Point
WEEKS 1-2 MECHANISMS
 References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
Designing flapping wings as oscillating structures
 th World Congress on Structural and Multidisciplinary Optimization May 9-4,, Orlando, Florida, USA Designing flapping wings as oscillating structures Zhiyuan Zhang, Ashok V. Kumar, Raphael T. Haftka University
th World Congress on Structural and Multidisciplinary Optimization May 9-4,, Orlando, Florida, USA Designing flapping wings as oscillating structures Zhiyuan Zhang, Ashok V. Kumar, Raphael T. Haftka University
MENG 372 Chapter 3 Graphical Linkage Synthesis. All figures taken from Design of Machinery, 3 rd ed. Robert Norton 2003
 MENG 372 Chapter 3 Graphical Linkage Synthesis All figures taken from Design of Machinery, 3 rd ed. Robert Norton 2003 1 Introduction Synthesis: to design or create a mechanism to give a certain motion
MENG 372 Chapter 3 Graphical Linkage Synthesis All figures taken from Design of Machinery, 3 rd ed. Robert Norton 2003 1 Introduction Synthesis: to design or create a mechanism to give a certain motion
On a Jansen leg with multiple gait patterns for reconfigurable walking platforms
 Special Issue Article On a Jansen leg with multiple gait patterns for reconfigurable walking platforms Advances in Mechanical Engineering 1 18 Ó The Author(s) 2015 DOI: 10.1177/1687814015573824 aime.sagepub.com
Special Issue Article On a Jansen leg with multiple gait patterns for reconfigurable walking platforms Advances in Mechanical Engineering 1 18 Ó The Author(s) 2015 DOI: 10.1177/1687814015573824 aime.sagepub.com
A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles
 A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles Jing Wang, Zhihua Qu,, Yi Guo and Jian Yang Electrical and Computer Engineering University
A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles Jing Wang, Zhihua Qu,, Yi Guo and Jian Yang Electrical and Computer Engineering University
DETC APPROXIMATE MOTION SYNTHESIS OF SPHERICAL KINEMATIC CHAINS
 Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007 September 4-7, 2007, Las Vegas, Nevada, USA DETC2007-34372
Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007 September 4-7, 2007, Las Vegas, Nevada, USA DETC2007-34372
Computational Design + Fabrication: 4D Analysis
 Computational Design + Fabrication: 4D Analysis Jonathan Bachrach EECS UC Berkeley October 6, 2015 Today 1 News Torque and Work Simple Machines Closed Chains Analysis Paper Review Lab 3 Critique News 2
Computational Design + Fabrication: 4D Analysis Jonathan Bachrach EECS UC Berkeley October 6, 2015 Today 1 News Torque and Work Simple Machines Closed Chains Analysis Paper Review Lab 3 Critique News 2
Data-Driven Kinematics: Unifying Synthesis of Planar Four-Bar Linkages via Motion Analysis
 Data-Driven Kinematics: Unifying Synthesis of Planar Four-Bar Linkages via Motion Analysis Anurag Purwar, Q. Jeffrey Ge Abstract This paper presents a novel data-driven approach for kinematic synthesis
Data-Driven Kinematics: Unifying Synthesis of Planar Four-Bar Linkages via Motion Analysis Anurag Purwar, Q. Jeffrey Ge Abstract This paper presents a novel data-driven approach for kinematic synthesis
A Review Paper on Analysis and Simulation of Kinematics of 3R Robot with the Help of RoboAnalyzer
 A Review Paper on Analysis and Simulation of Kinematics of 3R Robot with the Help of RoboAnalyzer Ambuja Singh Student Saakshi Singh Student, Ratna Priya Kanchan Student, Abstract -Robot kinematics the
A Review Paper on Analysis and Simulation of Kinematics of 3R Robot with the Help of RoboAnalyzer Ambuja Singh Student Saakshi Singh Student, Ratna Priya Kanchan Student, Abstract -Robot kinematics the
Theory of Machines Course # 1
 Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
5.2. The Sine Function and the Cosine Function. Investigate A
 5.2 The Sine Function and the Cosine Function What do an oceanographer, a stock analyst, an audio engineer, and a musician playing electronic instruments have in common? They all deal with periodic patterns.
5.2 The Sine Function and the Cosine Function What do an oceanographer, a stock analyst, an audio engineer, and a musician playing electronic instruments have in common? They all deal with periodic patterns.
ME5286 Robotics Spring 2014 Quiz 1 Solution. Total Points: 30
 Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
DESIGN AND ANALYSIS OF WEIGHT SHIFT STEERING MECHANISM BASED ON FOUR BAR MECHANISM
 International Journal of Mechanical Engineering and Technology (IJMET) Volume 8, Issue 12, December 2017, pp. 417 424, Article ID: IJMET_08_12_041 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=8&itype=12
International Journal of Mechanical Engineering and Technology (IJMET) Volume 8, Issue 12, December 2017, pp. 417 424, Article ID: IJMET_08_12_041 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=8&itype=12
DETC THREE-DIMENSIONAL KINEMATIC ANALYSIS OF THE ACTUATED SPOKE WHEEL ROBOT. September 10-13, 2006, Philadelphia, Pennsylvania, USA
 Proceedings Proceedings of IDETC/CIE of IDETC 06 2006 ASME 2006 ASME International International Design Design Engineering Engineering Technical Technical Conferences Conferences & September Computers
Proceedings Proceedings of IDETC/CIE of IDETC 06 2006 ASME 2006 ASME International International Design Design Engineering Engineering Technical Technical Conferences Conferences & September Computers
Video 11.1 Vijay Kumar. Property of University of Pennsylvania, Vijay Kumar
 Video 11.1 Vijay Kumar 1 Smooth three dimensional trajectories START INT. POSITION INT. POSITION GOAL Applications Trajectory generation in robotics Planning trajectories for quad rotors 2 Motion Planning
Video 11.1 Vijay Kumar 1 Smooth three dimensional trajectories START INT. POSITION INT. POSITION GOAL Applications Trajectory generation in robotics Planning trajectories for quad rotors 2 Motion Planning
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
DESIGN OF ONE DEGREE OF FREEDOM CLOSED LOOP SPATIAL CHAINS USING NON-CIRCULAR GEARS
 DESIGN OF ONE DEGREE OF FREEDOM CLOSED LOOP SPATIAL CHAINS USING NON-CIRCULAR GEARS By MANDAR SHRIKANT HARSHE A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
DESIGN OF ONE DEGREE OF FREEDOM CLOSED LOOP SPATIAL CHAINS USING NON-CIRCULAR GEARS By MANDAR SHRIKANT HARSHE A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
The closed-loop kinematics modeling and numerical calculation of the parallel hexapod robot in space
 Special Issue Article The closed-loop kinematics modeling and numerical calculation of the parallel hexapod robot in space Advances in Mechanical Engineering 017, Vol. 9() 1 15 Ó The Author(s) 017 DOI:
Special Issue Article The closed-loop kinematics modeling and numerical calculation of the parallel hexapod robot in space Advances in Mechanical Engineering 017, Vol. 9() 1 15 Ó The Author(s) 017 DOI:
DESIGN OF GRAPHICAL USER INTERFACES FOR THE SYNTHESIS OF PLANAR RR DYADS
 Proceedings of the ASME 2014 International Mechanical Engineering Congress and Exposition IMECE2014 November 14-20, 2014, Montreal, Quebec, Canada IMECE2014-38564 DESIGN OF GRAPHICAL USER INTERFACES FOR
Proceedings of the ASME 2014 International Mechanical Engineering Congress and Exposition IMECE2014 November 14-20, 2014, Montreal, Quebec, Canada IMECE2014-38564 DESIGN OF GRAPHICAL USER INTERFACES FOR
Mechanism and Robot Kinematics, Part I: Algebraic Foundations
 Mechanism and Robot Kinematics, Part I: Algebraic Foundations Charles Wampler General Motors R&D Center In collaboration with Andrew Sommese University of Notre Dame Overview Why kinematics is (mostly)
Mechanism and Robot Kinematics, Part I: Algebraic Foundations Charles Wampler General Motors R&D Center In collaboration with Andrew Sommese University of Notre Dame Overview Why kinematics is (mostly)
Modular robotics and locomotion Juan Gonzalez Gomez
 Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. May 2006 Contents Introduction to robotics Introduction
Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. May 2006 Contents Introduction to robotics Introduction
UC Irvine UC Irvine Previously Published Works
 UC Irvine UC Irvine Previously Published Works Title Dimensional synthesis of six-bar linkage as a constrained RPR chain Permalink https://escholarship.org/uc/item/6sw8h4n5 ISBN 9789400749016 Authors Plecnik,
UC Irvine UC Irvine Previously Published Works Title Dimensional synthesis of six-bar linkage as a constrained RPR chain Permalink https://escholarship.org/uc/item/6sw8h4n5 ISBN 9789400749016 Authors Plecnik,
Synthesis of Planar Mechanisms, Part IX: Path Generation using 6 Bar 2 Sliders Mechanism
 International Journal of Computer Techniques - Volume 2 Issue 6, Nov- Dec 2015 RESEARCH ARTICLE Synthesis of Planar Mechanisms, Part IX: Path Generation using 6 Bar 2 Sliders Mechanism Galal Ali Hassaan
International Journal of Computer Techniques - Volume 2 Issue 6, Nov- Dec 2015 RESEARCH ARTICLE Synthesis of Planar Mechanisms, Part IX: Path Generation using 6 Bar 2 Sliders Mechanism Galal Ali Hassaan
DEPARTMENT - Mathematics. Coding: N Number. A Algebra. G&M Geometry and Measure. S Statistics. P - Probability. R&P Ratio and Proportion
 DEPARTMENT - Mathematics Coding: N Number A Algebra G&M Geometry and Measure S Statistics P - Probability R&P Ratio and Proportion YEAR 7 YEAR 8 N1 Integers A 1 Simplifying G&M1 2D Shapes N2 Decimals S1
DEPARTMENT - Mathematics Coding: N Number A Algebra G&M Geometry and Measure S Statistics P - Probability R&P Ratio and Proportion YEAR 7 YEAR 8 N1 Integers A 1 Simplifying G&M1 2D Shapes N2 Decimals S1
Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software
 Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software 1 Thavamani.P, 2 Ramesh.K, 3 Sundari.B 1 M.E Scholar, Applied Electronics, JCET, Dharmapuri, Tamilnadu, India 2 Associate Professor,
Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software 1 Thavamani.P, 2 Ramesh.K, 3 Sundari.B 1 M.E Scholar, Applied Electronics, JCET, Dharmapuri, Tamilnadu, India 2 Associate Professor,
C O M P U T E R G R A P H I C S. Computer Animation. Guoying Zhao 1 / 66
 Computer Animation Guoying Zhao 1 / 66 Basic Elements of Computer Graphics Modeling construct the 3D model of the scene Rendering Render the 3D model, compute the color of each pixel. The color is related
Computer Animation Guoying Zhao 1 / 66 Basic Elements of Computer Graphics Modeling construct the 3D model of the scene Rendering Render the 3D model, compute the color of each pixel. The color is related
SolidWorks Assembly Files. Assemblies Mobility. The Mating Game Mating features. Mechanical Mates Relative rotation about axes
 Assemblies Mobility SolidWorks Assembly Files An assembly file is a collection of parts The first part brought into an assembly file is fixed Other parts are constrained relative to that part (or other
Assemblies Mobility SolidWorks Assembly Files An assembly file is a collection of parts The first part brought into an assembly file is fixed Other parts are constrained relative to that part (or other
Single Actuator Shaker Design to Generate Infinite Spatial Signatures
 2 nd International and 17 th National Conference on Machines and Mechanisms inacomm215-55 Single Actuator Shaker Design to Generate Infinite Spatial Signatures K D Lagoo, T A Dwarakanath and D N Badodkar
2 nd International and 17 th National Conference on Machines and Mechanisms inacomm215-55 Single Actuator Shaker Design to Generate Infinite Spatial Signatures K D Lagoo, T A Dwarakanath and D N Badodkar
Mechanism Synthesis Rules
 Mechanism Synthesis ules Linkage Transformation ules Grashof s Law Inversion ME312: Dynamics of Mechanisms 1 BB LINKAGE TANSFOMATION ULE 1 evolute joints in any loop can be replaced by prismatic joints
Mechanism Synthesis ules Linkage Transformation ules Grashof s Law Inversion ME312: Dynamics of Mechanisms 1 BB LINKAGE TANSFOMATION ULE 1 evolute joints in any loop can be replaced by prismatic joints
Robot Inverse Kinematics Asanga Ratnaweera Department of Mechanical Engieering
 PR 5 Robot Dynamics & Control /8/7 PR 5: Robot Dynamics & Control Robot Inverse Kinematics Asanga Ratnaweera Department of Mechanical Engieering The Inverse Kinematics The determination of all possible
PR 5 Robot Dynamics & Control /8/7 PR 5: Robot Dynamics & Control Robot Inverse Kinematics Asanga Ratnaweera Department of Mechanical Engieering The Inverse Kinematics The determination of all possible
An Interactive Software Environment for Gait Generation and Control Design of Sony Legged Robots
 An Interactive Software Environment for Gait Generation and Control Design of Sony Legged Robots Dragos Golubovic and Huosheng Hu Department of Computer Science, University of Essex, Colchester CO4 3SQ,
An Interactive Software Environment for Gait Generation and Control Design of Sony Legged Robots Dragos Golubovic and Huosheng Hu Department of Computer Science, University of Essex, Colchester CO4 3SQ,
Inherently Balanced Double Bennett Linkage
 Inherently Balanced Double Bennett Linkage V. van der Wijk Delft University of Technology - Dep. of Precision and Microsystems Engineering Mechatronic System Design, e-mail: v.vanderwijk@tudelft.nl Abstract.
Inherently Balanced Double Bennett Linkage V. van der Wijk Delft University of Technology - Dep. of Precision and Microsystems Engineering Mechatronic System Design, e-mail: v.vanderwijk@tudelft.nl Abstract.
Trajectory Planning for Automatic Machines and Robots
 Luigi Biagiotti Claudio Melchiorri Trajectory Planning for Automatic Machines and Robots Springer 1 Trajectory Planning 1 1.1 A General Overview on Trajectory Planning 1 1.2 One-dimensional Trajectories
Luigi Biagiotti Claudio Melchiorri Trajectory Planning for Automatic Machines and Robots Springer 1 Trajectory Planning 1 1.1 A General Overview on Trajectory Planning 1 1.2 One-dimensional Trajectories
Atlas of Fixed Links and Equivalent Links in Mechanisms of 6 Links, 7 Joints, 1F Kinematic Chains Using [JJ] Matrix
![Atlas of Fixed Links and Equivalent Links in Mechanisms of 6 Links, 7 Joints, 1F Kinematic Chains Using [JJ] Matrix](/thumbs/74/70568404.jpg "Atlas of Fixed Links and Equivalent Links in Mechanisms of 6 Links, 7 Joints, 1F Kinematic Chains Using [JJ] Matrix") Atlas of Fixed Links and Equivalent Links in Mechanisms of 6 Links, 7 Joints, 1F Kinematic Chains Using [JJ] Matrix Dr. Ali Hasan Mechanical Engineering Department, Jamia Millia Islamia, New Delhi. ABSTRACT-Author
Atlas of Fixed Links and Equivalent Links in Mechanisms of 6 Links, 7 Joints, 1F Kinematic Chains Using [JJ] Matrix Dr. Ali Hasan Mechanical Engineering Department, Jamia Millia Islamia, New Delhi. ABSTRACT-Author
Mimicry of Fish Swimming Patterns in a Robotic Fish
 Mimicry of Fish Swimming Patterns in a Robotic Fish Jian-Xin Xu, Qinyuan Ren, Wenchao Gao and Xue-Lei Niu Department of Electrical and Computer Engineering National University of Singapore, Singapore 117576
Mimicry of Fish Swimming Patterns in a Robotic Fish Jian-Xin Xu, Qinyuan Ren, Wenchao Gao and Xue-Lei Niu Department of Electrical and Computer Engineering National University of Singapore, Singapore 117576
Bi-mobile Mechanisms Designed by Means of Their Inverse Models
 International Conference on Applied Mechanics, Electronics and Mechatronics Engineering (AMEME ) ISBN: ---- Bi-mobile Mechanisms Designed by Means of ir Inverse Models Adriana COMANESCU * and Claudiu ZALESCHI
International Conference on Applied Mechanics, Electronics and Mechatronics Engineering (AMEME ) ISBN: ---- Bi-mobile Mechanisms Designed by Means of ir Inverse Models Adriana COMANESCU * and Claudiu ZALESCHI
SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT
 SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT Macie Tronacki* Industrial Research Institute for Automation and Measurements, Warsaw, Poland Corresponding author (mtronacki@piap.pl)
SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT Macie Tronacki* Industrial Research Institute for Automation and Measurements, Warsaw, Poland Corresponding author (mtronacki@piap.pl)
ROBOTICS 9/2/2015. Last and First Name Matricola
 ROBOTICS 9/2/2015 Last and First Name Matricola PART 1 - QUIZ (8 marks) 1. The geometric specification of the robot working space - considers the last 3 degrees of freedom of a manipulator T F - is only
ROBOTICS 9/2/2015 Last and First Name Matricola PART 1 - QUIZ (8 marks) 1. The geometric specification of the robot working space - considers the last 3 degrees of freedom of a manipulator T F - is only
Lecture Note 2: Configuration Space
 ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
SYNTHETICA 2.0: SOFTWARE FOR THE SYNTHESIS OF CONSTRAINED SERIAL CHAINS
 Proceedings of the DETC 04 ASME 2004 Design Engineering Technical Conferences September 28-October 2, 2004, Salt Lake City, Utah, USA DETC2004-57524 SYNTHETICA 2.0: SOFTWARE FOR THE SYNTHESIS OF CONSTRAINED
Proceedings of the DETC 04 ASME 2004 Design Engineering Technical Conferences September 28-October 2, 2004, Salt Lake City, Utah, USA DETC2004-57524 SYNTHETICA 2.0: SOFTWARE FOR THE SYNTHESIS OF CONSTRAINED
Mechanics Place in Science Mechanisms and Structures Number Synthesis Paradoxes and Isomers Transformations and Inversions Grashof s Law
 INTODUCTION TO MECHANISM SYNTHESIS Mechanics Place in Science Mechanisms and Structures Number Synthesis Paradoxes and Isomers Transformations and Inversions Grashof s Law ME312: Dynamics of Mechanisms
INTODUCTION TO MECHANISM SYNTHESIS Mechanics Place in Science Mechanisms and Structures Number Synthesis Paradoxes and Isomers Transformations and Inversions Grashof s Law ME312: Dynamics of Mechanisms
SYNTHESIS OF PLANAR MECHANISMS FOR PICK AND PLACE TASKS WITH GUIDING LOCATIONS
 Proceedings of the ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference IDETC/CIE 2013 August 4-7, 2013, Portland, Oregon, USA DETC2013-12021
Proceedings of the ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference IDETC/CIE 2013 August 4-7, 2013, Portland, Oregon, USA DETC2013-12021
Spherical Lamina Emergent Mechanisms
 Brigham Young University BYU ScholarsArchive All Faculty Publications 2012-10 Spherical Lamina Emergent Mechanisms Samuel E. Wilding Brigham Young University - Provo Larry L. Howell Brigham Young University
Brigham Young University BYU ScholarsArchive All Faculty Publications 2012-10 Spherical Lamina Emergent Mechanisms Samuel E. Wilding Brigham Young University - Provo Larry L. Howell Brigham Young University
Fundamentals of Robotics Study of a Robot - Chapter 2 and 3
 Fundamentals of Robotics Study of a Robot - Chapter 2 and 3 Sergi Valverde u1068016@correu.udg.edu Daniel Martínez u1068321@correu.udg.edu June 9, 2011 1 Introduction This report introduces the second
Fundamentals of Robotics Study of a Robot - Chapter 2 and 3 Sergi Valverde u1068016@correu.udg.edu Daniel Martínez u1068321@correu.udg.edu June 9, 2011 1 Introduction This report introduces the second
Simulation Model for Coupler Curve Generation using Five Bar Planar Mechanism With Rotation Constraint
 Simulation Model for Coupler Curve Generation using Five Bar Planar Mechanism With Rotation Constraint A. K. Abhyankar, S.Y.Gajjal Department of Mechanical Engineering, NBN Sinhgad School of Engineering,
Simulation Model for Coupler Curve Generation using Five Bar Planar Mechanism With Rotation Constraint A. K. Abhyankar, S.Y.Gajjal Department of Mechanical Engineering, NBN Sinhgad School of Engineering,
Modeling and kinematics simulation of freestyle skiing robot
 Acta Technica 62 No. 3A/2017, 321 334 c 2017 Institute of Thermomechanics CAS, v.v.i. Modeling and kinematics simulation of freestyle skiing robot Xiaohua Wu 1,3, Jian Yi 2 Abstract. Freestyle skiing robot
Acta Technica 62 No. 3A/2017, 321 334 c 2017 Institute of Thermomechanics CAS, v.v.i. Modeling and kinematics simulation of freestyle skiing robot Xiaohua Wu 1,3, Jian Yi 2 Abstract. Freestyle skiing robot
Using RecurDyn. Contents
 Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Spatial R-C-C-R Mechanism for a Single DOF Gripper
 NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
FREE SINGULARITY PATH PLANNING OF HYBRID PARALLEL ROBOT
 Proceedings of the 11 th International Conference on Manufacturing Research (ICMR2013), Cranfield University, UK, 19th 20th September 2013, pp 313-318 FREE SINGULARITY PATH PLANNING OF HYBRID PARALLEL
Proceedings of the 11 th International Conference on Manufacturing Research (ICMR2013), Cranfield University, UK, 19th 20th September 2013, pp 313-318 FREE SINGULARITY PATH PLANNING OF HYBRID PARALLEL
THEORETICAL AND EXPERIMENTAL RESEARCHES ON THE DYNAMICS OF MOBILE ROBOTS
 Revista Mecanisme şi Manipulatoare, Vol., Nr., 6, pag. 67-7 ARoMM-IFoMM HEOREICAL AND EXPERIMENAL RESEARCHES ON HE DYNAMICS OF MOBILE ROBOS Nicolae DUMIRU *, Mirela CHERCIU** *) Prof. dr. ing. Universitatea
Revista Mecanisme şi Manipulatoare, Vol., Nr., 6, pag. 67-7 ARoMM-IFoMM HEOREICAL AND EXPERIMENAL RESEARCHES ON HE DYNAMICS OF MOBILE ROBOS Nicolae DUMIRU *, Mirela CHERCIU** *) Prof. dr. ing. Universitatea
Optimal motion trajectories. Physically based motion transformation. Realistic character animation with control. Highly dynamic motion
 Realistic character animation with control Optimal motion trajectories Physically based motion transformation, Popovi! and Witkin Synthesis of complex dynamic character motion from simple animation, Liu
Realistic character animation with control Optimal motion trajectories Physically based motion transformation, Popovi! and Witkin Synthesis of complex dynamic character motion from simple animation, Liu
UC Irvine UC Irvine Previously Published Works
 UC Irvine UC Irvine Previously Published Works Title Synthesis of a Stephenson II function generator for eight precision positions Permalink https://escholarship.org/uc/item/nf29694 ISBN 978079855935 Authors
UC Irvine UC Irvine Previously Published Works Title Synthesis of a Stephenson II function generator for eight precision positions Permalink https://escholarship.org/uc/item/nf29694 ISBN 978079855935 Authors
[2] J. "Kinematics," in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.
![[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.](/thumbs/90/102406247.jpg "[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.") 92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
Overview. What is mechanism? What will I learn today? ME 311: Dynamics of Machines and Mechanisms Lecture 2: Synthesis
 Overview ME 311: Dynamics of Machines and Mechanisms Lecture 2: Synthesis By Suril Shah Some fundamentals Synthesis Function, path and motion generation Limiting condition Dimensional synthesis 1 2 What
Overview ME 311: Dynamics of Machines and Mechanisms Lecture 2: Synthesis By Suril Shah Some fundamentals Synthesis Function, path and motion generation Limiting condition Dimensional synthesis 1 2 What
J. Michael McCarthy. Type Synthesis. Gruebler s Equation, Assur Groups, Baranov Trusses, Graph Theory and Rigidity Theory
 J. Michael McCarthy Type Synthesis Gruebler s Equation, Assur Groups, Baranov Trusses, Graph Theory and Rigidity Theory Simple Machines The classification of machines was introduced during the Renaissance
J. Michael McCarthy Type Synthesis Gruebler s Equation, Assur Groups, Baranov Trusses, Graph Theory and Rigidity Theory Simple Machines The classification of machines was introduced during the Renaissance
ME 321 Kinematics and Dynamics of Machines
 .0 INTRODUCTION ME Kinematics and Dynamics of Machines All Text References in these notes are for: Mechanism Design: Analysis and Synthesis, Volume, Fourth Edition, Erdman, Sandor and Kota, Prentice-Hall,
.0 INTRODUCTION ME Kinematics and Dynamics of Machines All Text References in these notes are for: Mechanism Design: Analysis and Synthesis, Volume, Fourth Edition, Erdman, Sandor and Kota, Prentice-Hall,
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Contents 10. Graphs of Trigonometric Functions
 Contents 10. Graphs of Trigonometric Functions 2 10.2 Sine and Cosine Curves: Horizontal and Vertical Displacement...... 2 Example 10.15............................... 2 10.3 Composite Sine and Cosine
Contents 10. Graphs of Trigonometric Functions 2 10.2 Sine and Cosine Curves: Horizontal and Vertical Displacement...... 2 Example 10.15............................... 2 10.3 Composite Sine and Cosine
Zulfiqar Habib and Manabu Sakai. Received September 9, 2003
 Scientiae Mathematicae Japonicae Online, e-004, 63 73 63 G PH QUINTIC SPIRAL TRANSITION CURVES AND THEIR APPLICATIONS Zulfiqar Habib and Manabu Sakai Received September 9, 003 Abstract. A method for family
Scientiae Mathematicae Japonicae Online, e-004, 63 73 63 G PH QUINTIC SPIRAL TRANSITION CURVES AND THEIR APPLICATIONS Zulfiqar Habib and Manabu Sakai Received September 9, 003 Abstract. A method for family
Planning for Optimal Robot Trajectory for Visual Inspection
 Journal of Automation and Control, 2014, Vol. 2, No. 1, 15-20 Available online at http://pubs.sciepub.com/automation/2/1/3 Science and Education Publishing DOI:10.12691/automation-2-1-3 Planning for Optimal
Journal of Automation and Control, 2014, Vol. 2, No. 1, 15-20 Available online at http://pubs.sciepub.com/automation/2/1/3 Science and Education Publishing DOI:10.12691/automation-2-1-3 Planning for Optimal
Simplified Walking: A New Way to Generate Flexible Biped Patterns
 1 Simplified Walking: A New Way to Generate Flexible Biped Patterns Jinsu Liu 1, Xiaoping Chen 1 and Manuela Veloso 2 1 Computer Science Department, University of Science and Technology of China, Hefei,
1 Simplified Walking: A New Way to Generate Flexible Biped Patterns Jinsu Liu 1, Xiaoping Chen 1 and Manuela Veloso 2 1 Computer Science Department, University of Science and Technology of China, Hefei,
Mechanism and Robot Kinematics, Part II: Numerical Algebraic Geometry
 Mechanism and Robot Kinematics, Part II: Numerical Algebraic Geometry Charles Wampler General Motors R&D Center Including joint work with Andrew Sommese, University of Notre Dame Jan Verschelde, Univ.
Mechanism and Robot Kinematics, Part II: Numerical Algebraic Geometry Charles Wampler General Motors R&D Center Including joint work with Andrew Sommese, University of Notre Dame Jan Verschelde, Univ.
Experimental Studies of Flapping-wing Aerodynamics
 Experimental Studies of Flapping-wing Aerodynamics N. Phillips Aeromechanical Systems Group Cranfield University Defence Academy of the UK Shrivenham, Swindon, UK SN6 8LA Tel: 01793 78 5271 Fax: 01793
Experimental Studies of Flapping-wing Aerodynamics N. Phillips Aeromechanical Systems Group Cranfield University Defence Academy of the UK Shrivenham, Swindon, UK SN6 8LA Tel: 01793 78 5271 Fax: 01793
Modular robotics and locomotion Juan Gonzalez Gomez
 Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. April 2006 Index Introduction to Modular robotics Starting
Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. April 2006 Index Introduction to Modular robotics Starting
CONTROL ALGORITHM OP THE WALKER CLIMBING OVER OBSTACLES. D.E. Okhotsimski, A.K, Platonov U S S R
 Session 11 CONTROL ALGORITHM OP THE WALKER CLIMBING OVER OBSTACLES Robot Implementations D.E. Okhotsimski, A.K, Platonov U S S R Abstract. The paper deals with the problem of development the multilevel
Session 11 CONTROL ALGORITHM OP THE WALKER CLIMBING OVER OBSTACLES Robot Implementations D.E. Okhotsimski, A.K, Platonov U S S R Abstract. The paper deals with the problem of development the multilevel
A Task Driven Unified Synthesis of Planar Four-Bar and Six-Bar Linkages with R- and P- Joints For Five Position Realization
 A Task Driven Unified Synthesis of Planar Four-Bar and Six-Bar Linkages with R- and P- Joints For Five Position Realization Ping Zhao, Xiangyun Li, A. Purwar, Q.J. Ge, Hefei University of Technology Southwest
A Task Driven Unified Synthesis of Planar Four-Bar and Six-Bar Linkages with R- and P- Joints For Five Position Realization Ping Zhao, Xiangyun Li, A. Purwar, Q.J. Ge, Hefei University of Technology Southwest
Open Access The Kinematics Analysis and Configuration Optimize of Quadruped Robot. Jinrong Zhang *, Chenxi Wang and Jianhua Zhang
 Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 014, 6, 1685-1690 1685 Open Access The Kinematics Analysis and Configuration Optimize of Quadruped
Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 014, 6, 1685-1690 1685 Open Access The Kinematics Analysis and Configuration Optimize of Quadruped
Thomas Bräunl EMBEDDED ROBOTICS. Mobile Robot Design and Applications with Embedded Systems. Second Edition. With 233 Figures and 24 Tables.
 Thomas Bräunl EMBEDDED ROBOTICS Mobile Robot Design and Applications with Embedded Systems Second Edition With 233 Figures and 24 Tables Springer CONTENTS PART I: EMBEDDED SYSTEMS 1 Robots and Controllers
Thomas Bräunl EMBEDDED ROBOTICS Mobile Robot Design and Applications with Embedded Systems Second Edition With 233 Figures and 24 Tables Springer CONTENTS PART I: EMBEDDED SYSTEMS 1 Robots and Controllers
Kinematics of pantograph masts
 Kinematics of pantograph masts B. P. Nagaraj, R. Pandiyan ISRO Satellite Centre, Bangalore, 560 017, India and Ashitava Ghosal Dept. of Mechanical Engineering, Indian Institute of Science, Bangalore 560
Kinematics of pantograph masts B. P. Nagaraj, R. Pandiyan ISRO Satellite Centre, Bangalore, 560 017, India and Ashitava Ghosal Dept. of Mechanical Engineering, Indian Institute of Science, Bangalore 560
A Simplified Vehicle and Driver Model for Vehicle Systems Development
 A Simplified Vehicle and Driver Model for Vehicle Systems Development Martin Bayliss Cranfield University School of Engineering Bedfordshire MK43 0AL UK Abstract For the purposes of vehicle systems controller
A Simplified Vehicle and Driver Model for Vehicle Systems Development Martin Bayliss Cranfield University School of Engineering Bedfordshire MK43 0AL UK Abstract For the purposes of vehicle systems controller
101. Design and realization of virtual prototype of shotcrete robot based on OpenGL
 101. Design and realization of virtual prototype of shotcrete robot based on OpenGL Pei-si Zhong 1, Yi Zheng 2, Kun-hua Liu 3 1, 2, 3 Shandong University of Science and Technology, Qingdao, China 2 Qingdao
101. Design and realization of virtual prototype of shotcrete robot based on OpenGL Pei-si Zhong 1, Yi Zheng 2, Kun-hua Liu 3 1, 2, 3 Shandong University of Science and Technology, Qingdao, China 2 Qingdao
Design of a Flapping Wing Mechanism for Force Analysis and Optimization
 1 Ryan B. George and Dr. Scott L. Thomson Brigham Young University, Ira A. Fulton College of Engineering and Technology, Department of Mechanical Engineering, 435 CTB, Provo, UT 84604, USA Abstract The
1 Ryan B. George and Dr. Scott L. Thomson Brigham Young University, Ira A. Fulton College of Engineering and Technology, Department of Mechanical Engineering, 435 CTB, Provo, UT 84604, USA Abstract The
NOVEL SOLUTION FOR LEG MOTION WITH 5-LINK BELT MECHANISM
 Int. J. of Applied Mechanics and Engineering, 2014, vol.19, No.4, pp.699-708 DOI: 10.2478/ijame-2014-0048 NOVEL SOLUTION FOR LEG MOTION WITH 5-LINK BELT MECHANISM E.Ch. LOVASZ *, C. POP, F. POP and V.
Int. J. of Applied Mechanics and Engineering, 2014, vol.19, No.4, pp.699-708 DOI: 10.2478/ijame-2014-0048 NOVEL SOLUTION FOR LEG MOTION WITH 5-LINK BELT MECHANISM E.Ch. LOVASZ *, C. POP, F. POP and V.
Design Automation MAE 2250
 Design Automation MAE 2250 Team not functioning? 1. Ask the TA to call a counselling meeting Include head TAs Jeff/Katie 2. Assign clear goals and responsibilities Deliverables and dates for each member
Design Automation MAE 2250 Team not functioning? 1. Ask the TA to call a counselling meeting Include head TAs Jeff/Katie 2. Assign clear goals and responsibilities Deliverables and dates for each member
MACHINES AND MECHANISMS
 MACHINES AND MECHANISMS APPLIED KINEMATIC ANALYSIS Fourth Edition David H. Myszka University of Dayton PEARSON ж rentice Hall Pearson Education International Boston Columbus Indianapolis New York San Francisco
MACHINES AND MECHANISMS APPLIED KINEMATIC ANALYSIS Fourth Edition David H. Myszka University of Dayton PEARSON ж rentice Hall Pearson Education International Boston Columbus Indianapolis New York San Francisco
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Advances in Engineering Research, volume 123 2nd International Conference on Materials Science, Machinery and Energy Engineering (MSMEE 2017)
") Advances in Engineering Research, volume nd International Conference on Materials Science, Machinery and Energy Engineering MSMEE Kinematics Simulation of DOF Manipulator Guangbing Bao,a, Shizhao Liu,b,
Advances in Engineering Research, volume nd International Conference on Materials Science, Machinery and Energy Engineering MSMEE Kinematics Simulation of DOF Manipulator Guangbing Bao,a, Shizhao Liu,b,
DETC SLIDER CRANKS AS COMPATIBILITY LINKAGES FOR PARAMETERIZING CENTER POINT CURVES
 Proceedings of the ASME 2009 International Design Engineering Technical Conferences & Computers and Information Proceedings in Engineering of IDETC/CIE Conference 2009 ASME 2009 International Design Engineering
Proceedings of the ASME 2009 International Design Engineering Technical Conferences & Computers and Information Proceedings in Engineering of IDETC/CIE Conference 2009 ASME 2009 International Design Engineering