Modular robotics and locomotion Juan Gonzalez Gomez
|
|
|
- Richard Hicks
- 6 years ago
- Views:
Transcription
1 Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. May 2006
2 Contents Introduction to robotics Introduction to modular robotics Starting platform: Y1 Modules Locomotion of minimal configurations Locomotion of 1D worm-like robot Locomotion of 2D snake-like robots Future work
3 Introduction to robotics

4 Main areas of robotics Manipulation: Robots that are able to grasp and manipulate objects Industrial robots Service Robots Locomotion: Capability of the robots to move from one point to another Mobile robots

5 Locomotion: Classification of mobile robots (I) Mobile robots can be classified according to environment in which they move: Air. Flying robots: robotics planes, helicopters, insects... Water. Swimming robots: fish, snakes Earth. Terrestrial robots: Move on a surface Horizontal surface: Locomotion on the ground Vertical surface: Climbing robots.
6 Locomotion: Classification of mobile robots (II) Mobile robots can be classified according to the elements used to perform the locomotion: Wheeled robots tracked robots Legged robots Body-motion robots
7 Wheeled robots Locomotion is easy to achieve They are very efficient Mechanics is very well known DISADVANTAGE: They can only move on special surfaces

8 Tracked robots Very similar to wheeled robot They can move better in a rough terrain



9 Legged robots Higher power consumption More complex Coordination problem 2 legs Why there are so many legged animals in the nature? 8 legs 6 legs 4 legs
10 Body-motion robots The locomotion is based on the movements of the body Examples: snakes, worms...

11 Classification according the structure Specific design Modular design Specific design of an Humanoid Video Modular approach
12 Modular robotics


13 Introduction to Modular Robotics (I) Main idea: Building robots composed of modules The design is focused in the module, not in a particular robot The different combinations of modules are called configurations There are two kinds of modular robots: Manually reconfigurable robots Self-reconfigurable robots
14 Introduction to Modular Robotics (II) The idea of modular robotics was introduced by Mark Yim, in 1994 There are many groups working on this topic in the world. The most avanced robots are: POLYBOT (USA). Palo Alto Research Center (PARC) M-TRAN (JAPAN). Advance Industrial Science Technology (AIST) YAMOR (Swiss). Ecole Polytechnique Federale de Lausanne (EPFL)


15 Introduction to Modular Robotics (V) YAMOR The modules have 1 DOF Manually reconfigurable Control: ARM and FPGA Communication via bluetooth Connection using velcro


16 Introduction to Modular Robotics (III) Generation 1 Manually reconfigurable Many versions POLYBOT All the modules have 1 DOF 3 generations of modules Generation 3 Generation 2 11x7x6 cm Power PC 555 1MB Ram Can Bus Infrared emitters and detectors 5x5x5cm Maxon motor Similar electronics than G2
 M-TRAN 4")


17 Introduction to Modular Robotics (IV) M-TRAN 4 Legged All the modules have 2 DOF 6x12x6 cm CPU: 1 Neuron Chip and 3 PICs Acceleration sensor Wheel Snake Video

18 Starting platform: Y1 Modules

19 Y1 Modules: Introduction We needed a cheap and easy-to-build platform to research on modular robotics It was not possible to buy the modules developed by the other groups Y1 Modules is the first generation Fast prototyping Manually reconfigurable robots Students can build them very easily

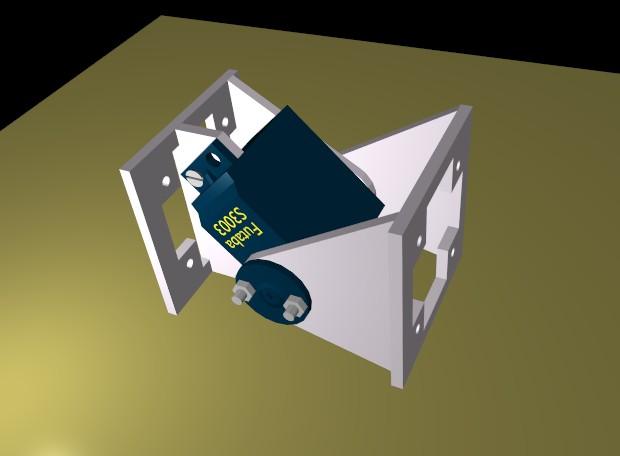
20 Y1 module: Characteristics Material: 3mm Plastic Servo: Futaba 3003 Dimension: 52x52x72mm Range: 180 degrees Two types of connection: Same orientation 90 degrees rotation Video





21 Y1 modules: Building in 6 steps
 2D structures 3D")
22 Y1 modules: Topology 1D: Chain robots (Worms, snakes) 2D structures 3D structures

23 Y1 Modules: 1D Structures (Chain robots) Two different type of robots: Same orientation 90 degrees rotation





24 Y1 modules: Electronics The electronic and power supply are located outside the module An 8 bits micro-controller is used for the generation of the PWM signal that position the servos The software running in the PC send the position to the servos by serial communication Y1 Modules RS-232 PC Power supply PWM
25 Y1 modules: Software The modules are controlled by the PC The software can set the position of every module There is an simple API Application API Position each module Enable/disable each module Modules controller Demo Let's see some code... Let's move one module...
26 Locomotion of minimal configurations

27 Introduction Complex robots can be constructed by attaching these modules But, what we wonder is: What is the minimum number of modules needed to achieve locomotion in 1D and 2D? How do these modules have to be coordinated to achieve the locomotion?
28 Configuration with one module (II) Can one module move from one point to another?? How can we test it????? Test Let's move one module...
29 Configuration with one module Answer: no locomotion Let's try with two modules...
30 Configuration with two modules: Pitch-Pitch Pitch axis Can this robot move from one point to another? if so... How do we have to coordinate the articulations????? Test Let's move two modules...

31 Configuration with two modules: Pitch-Pitch Pitch axis Answer: yes!! only two modules is enough for locomotion in 1D The robot can move forward and backward Let's try to study what happened...
32 Configuration Pitch-Pitch: Coordination 1 2π t) ϕ1 = Asin( T ϕ2 = Asin( 2π t+ φ ) T Two sinusoidal waves are applied to each articulation These waves only differ on the phase ( φ ) φ determines the coordination of the movement 2
33 Configuration I (Pitch-Pitch) Results 5,5 5 When φ is in the range [100, 130] degrees, the speed is maximum and the coordination is the best. ΔS (cm/cycle) 4,5 4 3,5 3 2,5 2 Demo 1,5 1 0, φ
34 Locomotion in 2D Now we want to build the minimal configuration capable of moving in 2D How many modules are necessary? What is the coordination? One module is not enough... Two modules? Three modules?????
35 Locomotion in 2D Let's try this configuration... Can this robot move from one point to another? Test Let's move two modules...
36 Locomotion in 2D ANSWER: NO Let's try with three modules... How can we connect the modules? Are three modules enough for moving in 2D? How are the modules coordinates? Test Let's move three modules...
 1D and 2D sinusoidal gait Lateral shift gait Lateral rolling")
37 Configuration II (Pitch-Yaw-Pitch) Description 1 Yaw Axis 2 3 Pitch axis Pitch axis Three modules: two rotating in the pitch axis and one in the yaw We call it Pitch-Yaw-Pitch configuration (PYP) 1D and 2D sinusoidal gait Lateral shift gait Lateral rolling gait
38 Configuration II (Pitch-Yaw-Pitch) 1D sinusoidal gait 1 ϕ1 = Asin( 2π t) T 2 3 ϕ2 = 0 ϕ3 = Asin( 2π t + φ ) T The angle of articulation 2 fixed to 0 degrees Articulations 1 and 3 coordinated in the same way that in the PP configuration Sames results as in configuration PP

39 Configuration II (Pitch-Yaw-Pitch) 2D sinusoidal gait 1 ϕ1 = Asin( 2π t) T ϕ2 = 0 ϕ3 = Asin( 2π t + φ ) T The same as in 1D sinusoidal gait, but the angle of articulation 2 different from 0 degrees The trajectory of the robot is an arc 2 3
40 Configuration II (Pitch-Yaw-Pitch) Lateral shift gait 1 ϕ1 = Asin( 2π t) T 2π t + π ) ϕ2 = Asin( 2 T ϕ3 = ϕ1 A<=40 Module 1 and 3 are in phase Module 2 is 90 degrees out of phase The robot moves parallel to its body axis 2 3

41 Configuration II (Pitch-Yaw-Pitch) Lateral rolling gait The same coordination as in the lateral shift gait, but using and amplitude A>60 degrees. The sense of rolling can also be controlled by changing the sign of the difference of phase The robot rolls about its body axis
42 Minimal configuration in 2D Which is the minimal configuration in 2D that can move from one point to another? How do we have to coordinate the modules? At least, we need three modules...???? Test
 1D sinusoidal gait along six different directions Rotation about the robot's yaw")
43 Configuration III: three-modules star Description Three modules in the same plane, moving about its pitch axis The angle between the modules is 120 degrees (connected in a three-points-star form) 1D sinusoidal gait along six different directions Rotation about the robot's yaw axis
44 Configuration III: three-modules star 1D sinusoidal gait The robot can move along six different directions Three sinusoidal waves are applied Example: In order to move along the red direction: ϕ2 = ϕ3 = Asin( 2π ) T ϕ 1= Asin( 2π + φ ) T 100< φ <130
45 Configuration III: three-modules star Rotation about its yaw axis Rotation about the robot yaw axis Three sinusoidal waves are applied ϕ 1 = Asin( 2π T ) ϕ 2 = Asin( 2π + T 2π ) 3 ϕ 3= Asin( 2π + T 4π π ) 3 Video
46 Conclusions... We have found three minimal configurations: 1D Structure Locomotion in 1D 1D Structure Locomotion in 2D Rolling 2D Structure Locomotion in 2D Rotating All of these robots are controlled using sinusoidal signals The phase difference determines the coordination between the modules A: Amplitude 2π φ t+ ) ϕ = Asin( T T: Period φ : Phase
47 Conclusions... We have discover the basic coordination method that is found in nature. All the vertebrates have central pattern generators (CPGs) in the Cord. CPG are oscillators that generate periodic signals that are applied to the muscles, making the animal move. CPGs Cord

48 Conclusions... We are applying the same model that in nature, but a little simplied CPG ϕ = Asin( π 2 t+ φ ) T There are one CPG per module: Module 1 Module 2 Module 3 CPG CPG CPG CPG Module 4
49 Conclusions... We have found a general control method valid for all the configurations!!! We only have to find the different parameters of the CPG: Phase difference, Amplitude and period.

50 Locomotion of 1D worm-like robot
51 1D chain robot: Introduction Configuration: 8 Y1 modules in the same orientation Dimensions: 52x52x576mm:
52 1D Chain robot: Locomotion approaches Two approaches can be used for the locomotion: Using 8 CPGs Using a global wave that travel through the robot, from the tail to the head For the second approach only 4 parameters have to be specified: Waveform Wavelength Amplitude Period

53 1D chain robots: Global waves The locomotion characteristics depend on the global wave used: High amplitude: Crossing over obstacles Low amplitude: Going inside a tube Semi-sine wave: Caterpillar locomotion




54 1D chain robots: Locomotion capabilities One feature of these robots is that they can change their shape: Video
55 Locomotion of 2D snake-robot
56 Chain robot 2D: Introduction Robot composed of 8 Y1 modules Two adjacent modules are 90 degrees rotated 90 degrees rotation This robot have the following locomotion capabilities: 1D locomotion 1D locomotion in an arc Lateral shift Rotating parallel to the ground Lateral rolling

57 Chain robot 2D: Control approaches Using 8 CPGs Using two global waves. One for the vertical modules and the other for the horizontal: Some gaits are easier to implement with the first approach and others with the second

58 Chain robot 2D: 1D locomotion Locomotion in 1D: straight and arc trajectories CPG CPG CPG CPG Fixed: 0 degrees φ=120 CPG CPG CPG CPG Fixed: 30 degrees

59 Chain robot 2D: 2D locomotion Locomotion in 2D: Lateral shift and rotating Vertical wave Horizontal wave φ=90 Shift right φ= 90 Shift left φ=0 Anti-clockwise rotation φ=180 Clockwise rotation
60 Chain robot 2D: Lateral rolling Two CPGs are used for vertical and horizontal modules The phase difference between them is 90 degrees The robot rotates about its body axis CPG φ=90 CPG Demo
 The servo is more")

61 Future work (I) We are designing a new module (GZ2) The servo is more powerful It is stronger: made of aluminium It has four connection plates
")

62 Future work (II) Caterpillar configuration: Snake configuration:


63 Future work 4 Leg configuration

64 Future work Humanoid configuration
65 Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. April 2006
Modular robotics and locomotion Juan Gonzalez Gomez
 Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. April 2006 Index Introduction to Modular robotics Starting
Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. April 2006 Index Introduction to Modular robotics Starting
Praktikum: 11 Caterpillar-like robot realization
 18.272 Praktikum: 11 Caterpillar-like robot realization Lecturers Lecturers Houxiang Houxiang Zhang Zhang Manfred Manfred Grove Grove @Tams/hzhang Institute TAMS s http://tams-www.informatik.uni-hamburg.de/hzhang
18.272 Praktikum: 11 Caterpillar-like robot realization Lecturers Lecturers Houxiang Houxiang Zhang Zhang Manfred Manfred Grove Grove @Tams/hzhang Institute TAMS s http://tams-www.informatik.uni-hamburg.de/hzhang
Live modular Robots! Dr. Houxiang Zhang. Dr. Juan González-Gómez. Faculty of Mathematics, Informatics and Natural Sciences University of Hamburg
 Live modular Robots! Dr. Houxiang Zhang Faculty of Mathematics, Informatics and Natural Sciences University of Hamburg Dr. Juan González-Gómez School of Engineering Universidad Autonoma de Madrid DFKI
Live modular Robots! Dr. Houxiang Zhang Faculty of Mathematics, Informatics and Natural Sciences University of Hamburg Dr. Juan González-Gómez School of Engineering Universidad Autonoma de Madrid DFKI
YaMoR and Bluemove an autonomous modular robot with Bluetooth interface for exploring adaptive locomotion
 YaMoR and Bluemove an autonomous modular robot with Bluetooth interface for exploring adaptive locomotion R. Moeckel, C. Jaquier, K. Drapel, E. Dittrich, A. Upegui, A. Ijspeert Ecole Polytechnique Fédérale
YaMoR and Bluemove an autonomous modular robot with Bluetooth interface for exploring adaptive locomotion R. Moeckel, C. Jaquier, K. Drapel, E. Dittrich, A. Upegui, A. Ijspeert Ecole Polytechnique Fédérale
Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots
 24 Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots Juan Gonzalez-Gomez 1, Houxiang Zhang 2 and Eduardo Boemo 1 1 Universidad Autonoma de Madrid, 2 University of Hamburg
24 Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots Juan Gonzalez-Gomez 1, Houxiang Zhang 2 and Eduardo Boemo 1 1 Universidad Autonoma de Madrid, 2 University of Hamburg
Juan Gonzalez-Gomez1, Houxiang Zhang2 & Eduardo Boemo1 Universidad Autonoma de Madrid Spain 2
 Chapter Number: X Locomotion Principles of 1D Topology Pitch and Pitch Yaw Connecting Modular Robots Juan Gonzalez-Gomez1, Houxiang Zhang2 & Eduardo Boemo1 Universidad Autonoma de Madrid Spain 2 University
Chapter Number: X Locomotion Principles of 1D Topology Pitch and Pitch Yaw Connecting Modular Robots Juan Gonzalez-Gomez1, Houxiang Zhang2 & Eduardo Boemo1 Universidad Autonoma de Madrid Spain 2 University
Centipede Robot Locomotion
 Master Project Centipede Robot Locomotion Brian Jiménez García [brian.jimenez@epfl.ch] Supervisor: Auke Jan Ikspeert Biologically Inspired Robotics Group (BIRG) Swiss Federal Institute of Technology Lausanne
Master Project Centipede Robot Locomotion Brian Jiménez García [brian.jimenez@epfl.ch] Supervisor: Auke Jan Ikspeert Biologically Inspired Robotics Group (BIRG) Swiss Federal Institute of Technology Lausanne
Self-Reconfigurable Modular Robot (M-TRAN) and its Motion Design
 and its Motion Design") Self-Reconfigurable Modular Robot (M-TRAN) and its Motion Design Haruhisa KUROKAWA *, Akiya KAMIMURA *, Eiichi YOSHIDA *, Kohji TOMITA *, Satoshi MURATA ** and Shigeru KOKAJI * * National Institute of
Self-Reconfigurable Modular Robot (M-TRAN) and its Motion Design Haruhisa KUROKAWA *, Akiya KAMIMURA *, Eiichi YOSHIDA *, Kohji TOMITA *, Satoshi MURATA ** and Shigeru KOKAJI * * National Institute of
Reconfigurable Robot
 Reconfigurable Robot What is a Reconfigurable Robot? Self-reconfiguring modular robots are autonomous kinematic machines with variable morphology They are able to deliberately change their own shape by
Reconfigurable Robot What is a Reconfigurable Robot? Self-reconfiguring modular robots are autonomous kinematic machines with variable morphology They are able to deliberately change their own shape by
Research article. Introduction
 Research article Exploring adaptive locomotion with YaMoR, a novel autonomous modular robot with Bluetooth interface Rico Moeckel, Cyril Jaquier, Kevin Drapel, Elmar Dittrich, Andres Upegui and Auke Jan
Research article Exploring adaptive locomotion with YaMoR, a novel autonomous modular robot with Bluetooth interface Rico Moeckel, Cyril Jaquier, Kevin Drapel, Elmar Dittrich, Andres Upegui and Auke Jan
Motion Simulation of a Modular Robotic System
 Motion Simulation of a Modular Robotic System Haruhisa KUROKAWA, Kohji TOMITA, Eiichi YOSHIDA, Satoshi MURATA and Shigeru KOKAJI Mechanical Engineering Laboratory, AIST, MITI Namiki 1-2, Tsukuba, Ibaraki
Motion Simulation of a Modular Robotic System Haruhisa KUROKAWA, Kohji TOMITA, Eiichi YOSHIDA, Satoshi MURATA and Shigeru KOKAJI Mechanical Engineering Laboratory, AIST, MITI Namiki 1-2, Tsukuba, Ibaraki
Inverse Kinematics for Humanoid Robots using Artificial Neural Networks
 Inverse Kinematics for Humanoid Robots using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Inverse Kinematics for Humanoid Robots using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Mimicry of Fish Swimming Patterns in a Robotic Fish
 Mimicry of Fish Swimming Patterns in a Robotic Fish Jian-Xin Xu, Qinyuan Ren, Wenchao Gao and Xue-Lei Niu Department of Electrical and Computer Engineering National University of Singapore, Singapore 117576
Mimicry of Fish Swimming Patterns in a Robotic Fish Jian-Xin Xu, Qinyuan Ren, Wenchao Gao and Xue-Lei Niu Department of Electrical and Computer Engineering National University of Singapore, Singapore 117576
Inverse Kinematics for Humanoid Robots Using Artificial Neural Networks
 Inverse Kinematics for Humanoid Robots Using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Inverse Kinematics for Humanoid Robots Using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Section 5.4: Modeling with Circular Functions
 Section 5.4: Modeling with Circular Functions Circular Motion Example A ferris wheel with radius 25 feet is rotating at a rate of 3 revolutions per minute, When t = 0, a chair starts at its lowest point
Section 5.4: Modeling with Circular Functions Circular Motion Example A ferris wheel with radius 25 feet is rotating at a rate of 3 revolutions per minute, When t = 0, a chair starts at its lowest point
Open Access The Kinematics Analysis and Configuration Optimize of Quadruped Robot. Jinrong Zhang *, Chenxi Wang and Jianhua Zhang
 Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 014, 6, 1685-1690 1685 Open Access The Kinematics Analysis and Configuration Optimize of Quadruped
Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 014, 6, 1685-1690 1685 Open Access The Kinematics Analysis and Configuration Optimize of Quadruped
Metamorphic Robots Seminar Report 2006 ABSTRACT
 ABSTRACT Metamorphic robots with shape changing capabilities provide a powerful and flexible approach to complex tasks in space exploration. Such robots can autonomously and intelligently reconfigure their
ABSTRACT Metamorphic robots with shape changing capabilities provide a powerful and flexible approach to complex tasks in space exploration. Such robots can autonomously and intelligently reconfigure their
SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT
 SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT Macie Tronacki* Industrial Research Institute for Automation and Measurements, Warsaw, Poland Corresponding author (mtronacki@piap.pl)
SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT Macie Tronacki* Industrial Research Institute for Automation and Measurements, Warsaw, Poland Corresponding author (mtronacki@piap.pl)
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Module 1 : Introduction to robotics. Lecture 3 : Industrial Manipulators & AGVs. Objectives. History of robots : Main bodies and wrists
 Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
CSIS 0801 Final Year Project. Implementation of An Intelligent Hexapod Robot. Individual Final Report - Kinematics
 CSIS 0801 Final Year Project Implementation of An Intelligent Hexapod Robot Individual Final Report - Kinematics FYP Account: fyp14013 Name: Yip Sit Wun (Terry) UID: 3035009744 HKU CS FYP14013 Implementation
CSIS 0801 Final Year Project Implementation of An Intelligent Hexapod Robot Individual Final Report - Kinematics FYP Account: fyp14013 Name: Yip Sit Wun (Terry) UID: 3035009744 HKU CS FYP14013 Implementation
Climbing and Descending Control of a Snake Robot on Step Environments based on Kinematics
 13 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 13. Tokyo, Japan Climbing and Descending Control of a Snake Robot on Step Environments based on Kinematics Motoyasu
13 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 13. Tokyo, Japan Climbing and Descending Control of a Snake Robot on Step Environments based on Kinematics Motoyasu
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis
 Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
An object in 3D space
 An object in 3D space An object's viewpoint Every Alice object has a viewpoint. The viewpoint of an object is determined by: The position of the object in 3D space. The orientation of the object relative
An object in 3D space An object's viewpoint Every Alice object has a viewpoint. The viewpoint of an object is determined by: The position of the object in 3D space. The orientation of the object relative
Mobile Robots Locomotion
 Mobile Robots Locomotion Institute for Software Technology 1 Course Outline 1. Introduction to Mobile Robots 2. Locomotion 3. Sensors 4. Localization 5. Environment Modelling 6. Reactive Navigation 2 Today
Mobile Robots Locomotion Institute for Software Technology 1 Course Outline 1. Introduction to Mobile Robots 2. Locomotion 3. Sensors 4. Localization 5. Environment Modelling 6. Reactive Navigation 2 Today
Control of an 8-Legged, 24 DOF, Mechatronic Robot
 Control of an 8-Legged, 24 DOF, Mechatronic Robot Submitted by Brian Lim Youliang Kuvesvaran s/o Paramasivan National Junior College Assoc. Prof. Dr. Francis Malcolm John Nickols Abstract The objective
Control of an 8-Legged, 24 DOF, Mechatronic Robot Submitted by Brian Lim Youliang Kuvesvaran s/o Paramasivan National Junior College Assoc. Prof. Dr. Francis Malcolm John Nickols Abstract The objective
Towards a multi-segment ambulatory microrobot
 2 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2, Anchorage, Alaska, USA Towards a multi-segment ambulatory microrobot Katie L. Hoffman and Robert J.
2 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2, Anchorage, Alaska, USA Towards a multi-segment ambulatory microrobot Katie L. Hoffman and Robert J.
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Mobile Robotics. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Mobile Robotics Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Mobile Robotics Robotica for Computer Engineering students A.A. 2006/2007
White paper Cartesian handling systems a technical comparison with conventional robots
 White paper Cartesian handling a technical comparison with conventional robots Why is it worthwhile to use Cartesian handling? The trend in conventional assembly and handling solutions is moving from robots
White paper Cartesian handling a technical comparison with conventional robots Why is it worthwhile to use Cartesian handling? The trend in conventional assembly and handling solutions is moving from robots
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Intelligent Robotics Climbing robots achievements and challenging. Outline of today s lecture. Outline of today s lecture
 Intelligent Robotics Climbing robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University University of
Intelligent Robotics Climbing robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University University of
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Phase-Functioned Neural Networks for Motion Learning
 Phase-Functioned Neural Networks for Motion Learning TAMS University of Hamburg 03.01.2018 Sebastian Starke University of Edinburgh School of Informatics Institue of Perception, Action and Behaviour Sebastian.Starke@ed.ac.uk
Phase-Functioned Neural Networks for Motion Learning TAMS University of Hamburg 03.01.2018 Sebastian Starke University of Edinburgh School of Informatics Institue of Perception, Action and Behaviour Sebastian.Starke@ed.ac.uk
Parameterized Controller Generation for Multiple Mode Behavior
 Parameterized Controller Generation for Multiple Mode Behavior Chaohui Gong, Matthew J. Travers, Hsien-Tang Kao and Howie Choset {chaohuig, mtravers, hkao, choset}@cmu.edu Abstract We derive and demonstrate
Parameterized Controller Generation for Multiple Mode Behavior Chaohui Gong, Matthew J. Travers, Hsien-Tang Kao and Howie Choset {chaohuig, mtravers, hkao, choset}@cmu.edu Abstract We derive and demonstrate
Structural Configurations of Manipulators
 Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Ceilbot vision and mapping system
 Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Self-Reconfigurable Robots for Space Exploration Effect of compliance in modular robots structures on the locomotion Adi Vardi
 Self-Reconfigurable Robots for Space Exploration Effect of compliance in modular robots structures on the locomotion Adi Vardi Prof. Auke Jan Ijspeert Stéphane Bonardi, Simon Hauser, Mehmet Mutlu, Massimo
Self-Reconfigurable Robots for Space Exploration Effect of compliance in modular robots structures on the locomotion Adi Vardi Prof. Auke Jan Ijspeert Stéphane Bonardi, Simon Hauser, Mehmet Mutlu, Massimo
7 Modelling and Animating Human Figures. Chapter 7. Modelling and Animating Human Figures. Department of Computer Science and Engineering 7-1
 Modelling and Animating Human Figures 7-1 Introduction Modeling and animating an articulated figure is one of the most formidable tasks that an animator can be faced with. It is especially challenging
Modelling and Animating Human Figures 7-1 Introduction Modeling and animating an articulated figure is one of the most formidable tasks that an animator can be faced with. It is especially challenging
DETC THREE-DIMENSIONAL KINEMATIC ANALYSIS OF THE ACTUATED SPOKE WHEEL ROBOT. September 10-13, 2006, Philadelphia, Pennsylvania, USA
 Proceedings Proceedings of IDETC/CIE of IDETC 06 2006 ASME 2006 ASME International International Design Design Engineering Engineering Technical Technical Conferences Conferences & September Computers
Proceedings Proceedings of IDETC/CIE of IDETC 06 2006 ASME 2006 ASME International International Design Design Engineering Engineering Technical Technical Conferences Conferences & September Computers
Lesson 5.2: Transformations of Sinusoidal Functions (Sine and Cosine)
") Lesson 5.2: Transformations of Sinusoidal Functions (Sine and Cosine) Reflections Horizontal Translation (c) Vertical Translation (d) Remember: vertical stretch horizontal stretch 1 Part A: Reflections
Lesson 5.2: Transformations of Sinusoidal Functions (Sine and Cosine) Reflections Horizontal Translation (c) Vertical Translation (d) Remember: vertical stretch horizontal stretch 1 Part A: Reflections
Direction Control of Robotic Fish Using Infrared Sensor Modules and IPMC Activation Schemes with a dspic30f4013 DSC
 Direction Control of Robotic Fish Using Infrared Sensor Modules and IPMC Activation Schemes with a dspic30f4013 DSC Carl A. Coppola 04/03/2009 ECE 480, Team 04 ME 481, Team 09 Abstract This application
Direction Control of Robotic Fish Using Infrared Sensor Modules and IPMC Activation Schemes with a dspic30f4013 DSC Carl A. Coppola 04/03/2009 ECE 480, Team 04 ME 481, Team 09 Abstract This application
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Shadow Dexterous Hand C6M Technical Specification
 Shadow Dexterous Hand C6M Technical Specification Current release: 15 th August '09 Shadow Dextrous Hand - Technical Specification Page 2/9 1 Overview...3 2 Mechanical Profile...3 2.1 Dimensions...3 2.2
Shadow Dexterous Hand C6M Technical Specification Current release: 15 th August '09 Shadow Dextrous Hand - Technical Specification Page 2/9 1 Overview...3 2 Mechanical Profile...3 2.1 Dimensions...3 2.2
Sphero Lightning Lab Cheat Sheet
 Actions Tool Description Variables Ranges Roll Combines heading, speed and time variables to make the robot roll. Duration Speed Heading (0 to 999999 seconds) (degrees 0-359) Set Speed Sets the speed of
Actions Tool Description Variables Ranges Roll Combines heading, speed and time variables to make the robot roll. Duration Speed Heading (0 to 999999 seconds) (degrees 0-359) Set Speed Sets the speed of
Mechanical structure of a robot=skeleton of human body Study of structure of a robot=physical structure of the manipulator structure
 UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
CMPUT 412 Motion Control Wheeled robots. Csaba Szepesvári University of Alberta
 CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
4.8. Solving Problems with Trigonometry. Copyright 2011 Pearson, Inc.
 4.8 Solving Problems with Trigonometry Copyright 2011 Pearson, Inc. What you ll learn about More Right Triangle Problems Simple Harmonic Motion and why These problems illustrate some of the better- known
4.8 Solving Problems with Trigonometry Copyright 2011 Pearson, Inc. What you ll learn about More Right Triangle Problems Simple Harmonic Motion and why These problems illustrate some of the better- known
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
Robot Practical Course
 64-272 Robot Practical Course http://tams-www.informatik.uni-hamburg.de/ lectures/2013ss/praktikum/robot_practical_course/ Manfred Grove, Ben Adler University of Hamburg Faculty of Mathematics, Informatics
64-272 Robot Practical Course http://tams-www.informatik.uni-hamburg.de/ lectures/2013ss/praktikum/robot_practical_course/ Manfred Grove, Ben Adler University of Hamburg Faculty of Mathematics, Informatics
Self Assembly of Modular Manipulators with Active and Passive Modules
 Self Assembly of Modular Manipulators with Active and Passive Modules Seung-kook Yun and Daniela Rus Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology, Cambridge,
Self Assembly of Modular Manipulators with Active and Passive Modules Seung-kook Yun and Daniela Rus Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology, Cambridge,
Mechanism Kinematics and Dynamics
 Mechanism Kinematics and Dynamics Final Project 1. The window shield wiper For the window wiper, (1). Select the length of all links such that the wiper tip X p (t) can cover a 120 cm window width. (2).
Mechanism Kinematics and Dynamics Final Project 1. The window shield wiper For the window wiper, (1). Select the length of all links such that the wiper tip X p (t) can cover a 120 cm window width. (2).
Top of pin head. Engagement latch. Disengagement latch
 Autonomous and Self-Sufficient CONRO Modules for Reconfigurable Robots Andres Castano, Ramesh Chokkalingam, and Peter Will University of Southern California Information Sciences Institute 4676 Admiralty
Autonomous and Self-Sufficient CONRO Modules for Reconfigurable Robots Andres Castano, Ramesh Chokkalingam, and Peter Will University of Southern California Information Sciences Institute 4676 Admiralty
Control of Snake Like Robot for Locomotion and Manipulation
 Control of Snake Like Robot for Locomotion and Manipulation MYamakita 1,, Takeshi Yamada 1 and Kenta Tanaka 1 1 Tokyo Institute of Technology, -1-1 Ohokayama, Meguro-ku, Tokyo, Japan, yamakita@ctrltitechacjp
Control of Snake Like Robot for Locomotion and Manipulation MYamakita 1,, Takeshi Yamada 1 and Kenta Tanaka 1 1 Tokyo Institute of Technology, -1-1 Ohokayama, Meguro-ku, Tokyo, Japan, yamakita@ctrltitechacjp
University of Jordan Faculty of Engineering and Technology Mechatronics Engineering Department
 University of Jordan Faculty of Engineering and Technology Mechatronics Engineering Department 2016 Control and Measurement Laboratory Robotino Robot (Mobile Robot System) Robotino Robot Objectives: The
University of Jordan Faculty of Engineering and Technology Mechatronics Engineering Department 2016 Control and Measurement Laboratory Robotino Robot (Mobile Robot System) Robotino Robot Objectives: The
A Modular Self-Reconfigurable Bipartite Robotic System: Implementation and Motion Planning
 A Modular Self-Reconfigurable Bipartite Robotic System: Implementation and Motion Planning CEM ÜNSAL, HAN KILIÇÇÖTE, AND PRADEEP K. KHOSLA Institute for Complex Engineered Systems, Carnegie Mellon University,
A Modular Self-Reconfigurable Bipartite Robotic System: Implementation and Motion Planning CEM ÜNSAL, HAN KILIÇÇÖTE, AND PRADEEP K. KHOSLA Institute for Complex Engineered Systems, Carnegie Mellon University,
Task Priority Grasping and Locomotion Control of Modular Robot
 Task Priority Grasping and Locomotion Control of Modular Robot G. Salvietti, H.X. Zhang, J. Gonzalez-Gòmez, D. Prattichizzo, J.W. Zhang Abstract This paper presents modular robots for grasping manipulation
Task Priority Grasping and Locomotion Control of Modular Robot G. Salvietti, H.X. Zhang, J. Gonzalez-Gòmez, D. Prattichizzo, J.W. Zhang Abstract This paper presents modular robots for grasping manipulation
Self-Reconfigurable Modular Robot
 Proceedings of 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2001), 606-612. Self-Reconfigurable Modular Robot - Experiments on Reconfiguration and Locomotion - Akiya KAMIMURA
Proceedings of 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2001), 606-612. Self-Reconfigurable Modular Robot - Experiments on Reconfiguration and Locomotion - Akiya KAMIMURA
CONTROL ALGORITHM OP THE WALKER CLIMBING OVER OBSTACLES. D.E. Okhotsimski, A.K, Platonov U S S R
 Session 11 CONTROL ALGORITHM OP THE WALKER CLIMBING OVER OBSTACLES Robot Implementations D.E. Okhotsimski, A.K, Platonov U S S R Abstract. The paper deals with the problem of development the multilevel
Session 11 CONTROL ALGORITHM OP THE WALKER CLIMBING OVER OBSTACLES Robot Implementations D.E. Okhotsimski, A.K, Platonov U S S R Abstract. The paper deals with the problem of development the multilevel
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 6: Geometrical configurations Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 6: Geometrical configurations Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN
A Hybrid Software Platform for Sony AIBO Robots
 A Hybrid Software Platform for Sony AIBO Robots Dragos Golubovic, Bo Li, Huosheng Hu Department of Computer Science, University of Essex, Wivenhoe Park, Colchester CO4 3SQ, United Kingdom Email: {dgolub,
A Hybrid Software Platform for Sony AIBO Robots Dragos Golubovic, Bo Li, Huosheng Hu Department of Computer Science, University of Essex, Wivenhoe Park, Colchester CO4 3SQ, United Kingdom Email: {dgolub,
Modular Model of Snake Robot
 INDIAN INSTITUTE OF TECHNOLOGY, GUWAHATI EE304 DESIGN LABORATORY PROJECT REPORT Modular Model of Snake Robot Guide: Dr. Prithwijit Guha, Assistant Professor, IIT Guwahati Name Swapnil Gupta 120108036 Somitra
INDIAN INSTITUTE OF TECHNOLOGY, GUWAHATI EE304 DESIGN LABORATORY PROJECT REPORT Modular Model of Snake Robot Guide: Dr. Prithwijit Guha, Assistant Professor, IIT Guwahati Name Swapnil Gupta 120108036 Somitra
A Self-Reconfigurable Modular Robot: Reconfiguration Planning and Experiments
 A Self-Reconfigurable Modular Robot: Reconfiguration Planning and Experiments Eiichi Yoshida, Satoshi Murata, Akiya Kamimura, Kohji Tomita, Haruhisa Kurokawa, and Shigeru Kokaji Distributed System Design
A Self-Reconfigurable Modular Robot: Reconfiguration Planning and Experiments Eiichi Yoshida, Satoshi Murata, Akiya Kamimura, Kohji Tomita, Haruhisa Kurokawa, and Shigeru Kokaji Distributed System Design
3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit
 3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit 9 Toyomi Fujita and Yuya Kondo Tohoku Institute of Technology Japan 1. Introduction A 3D configuration and terrain sensing
3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit 9 Toyomi Fujita and Yuya Kondo Tohoku Institute of Technology Japan 1. Introduction A 3D configuration and terrain sensing
MARA. Modular collaborative robot, product specification. Electrical characteristics. Software characteristics. Motion characteristics
 MARA Modular collaborative robot, product specification Electrical characteristics Power input 100-230Vac, 50-60Hz. Nominal power consumption
MARA Modular collaborative robot, product specification Electrical characteristics Power input 100-230Vac, 50-60Hz. Nominal power consumption
MOTION TRAJECTORY PLANNING AND SIMULATION OF 6- DOF MANIPULATOR ARM ROBOT
 MOTION TRAJECTORY PLANNING AND SIMULATION OF 6- DOF MANIPULATOR ARM ROBOT Hongjun ZHU ABSTRACT:In order to better study the trajectory of robot motion, a motion trajectory planning and simulation based
MOTION TRAJECTORY PLANNING AND SIMULATION OF 6- DOF MANIPULATOR ARM ROBOT Hongjun ZHU ABSTRACT:In order to better study the trajectory of robot motion, a motion trajectory planning and simulation based
Motion Control (wheeled robots)
") Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Design of a Three-Axis Rotary Platform
 Design of a Three-Axis Rotary Platform William Mendez, Yuniesky Rodriguez, Lee Brady, Sabri Tosunoglu Mechanics and Materials Engineering, Florida International University 10555 W Flagler Street, Miami,
Design of a Three-Axis Rotary Platform William Mendez, Yuniesky Rodriguez, Lee Brady, Sabri Tosunoglu Mechanics and Materials Engineering, Florida International University 10555 W Flagler Street, Miami,
SELECTION OF WHEEL CHASSIS FOR MOBILE ROBOTS IN COURSE OF PRODUCTION PROCESSES AUTOMATIZATION
 6th INTERNATIONAL MULTIDISCIPLINARY CONFERENCE SELECTION OF WHEEL CHASSIS FOR MOBILE ROBOTS IN COURSE OF PRODUCTION PROCESSES AUTOMATIZATION Ing. Ladislav Kárník, CSc., Technical University of Ostrava,
6th INTERNATIONAL MULTIDISCIPLINARY CONFERENCE SELECTION OF WHEEL CHASSIS FOR MOBILE ROBOTS IN COURSE OF PRODUCTION PROCESSES AUTOMATIZATION Ing. Ladislav Kárník, CSc., Technical University of Ostrava,
CONRO: Towards Deployable Robots with Inter-Robot Metamorphic Capabilities
 Autonomous Robots 8, 309 324, 2000 c 2000 Kluwer Academic Publishers. Manufactured in The Netherlands. CONRO: Towards Deployable Robots with Inter-Robot Metamorphic Capabilities ANDRES CASTANO, WEI-MIN
Autonomous Robots 8, 309 324, 2000 c 2000 Kluwer Academic Publishers. Manufactured in The Netherlands. CONRO: Towards Deployable Robots with Inter-Robot Metamorphic Capabilities ANDRES CASTANO, WEI-MIN
Obstacle Avoiding Robot
 Brigosha Technologies Obstacle Avoiding Robot Introduction An Obstacle Avoiding Robot may be defined as a robot which can avoid any unwanted obstacle in its path and is capable of changing its path. The
Brigosha Technologies Obstacle Avoiding Robot Introduction An Obstacle Avoiding Robot may be defined as a robot which can avoid any unwanted obstacle in its path and is capable of changing its path. The
C. HECKMAN TEST 2A SOLUTIONS 170
 C HECKMN TEST SOLUTIONS 170 (1) [15 points] The angle θ is in Quadrant IV and tan θ = Find the exact values of 5 sin θ, cos θ, tan θ, cot θ, sec θ, and csc θ Solution: point that the terminal side of the
C HECKMN TEST SOLUTIONS 170 (1) [15 points] The angle θ is in Quadrant IV and tan θ = Find the exact values of 5 sin θ, cos θ, tan θ, cot θ, sec θ, and csc θ Solution: point that the terminal side of the
HIL/SIL BY DEVELOPMENT OF SIX-LEGGED ROBOT SLAIR2
 HIL/SIL BY DEVELOPMENT OF SIX-LEGGED ROBOT SLAIR2 DZHANTIMIROV 1, PALIS 2, SCHMUCKER 1, TELESH 2, ZAVGORODNIY 2 1 Department Virtual Engineering, Fraunhofer Institute for Factory Operation and Automation,
HIL/SIL BY DEVELOPMENT OF SIX-LEGGED ROBOT SLAIR2 DZHANTIMIROV 1, PALIS 2, SCHMUCKER 1, TELESH 2, ZAVGORODNIY 2 1 Department Virtual Engineering, Fraunhofer Institute for Factory Operation and Automation,
Implementation Of Stair Climbing Robo using Microcontroller
 Implementation Of Stair Climbing Robo using Microcontroller Mrs.A.H.Tirmare 1, Ms.P.S.Mali2, Ms.S.M.Bhoi 3 1 Assi.Professor E & Tc Department, Bharati Vidyapeeth s College Of Engg Shivaji University Kolhapur
Implementation Of Stair Climbing Robo using Microcontroller Mrs.A.H.Tirmare 1, Ms.P.S.Mali2, Ms.S.M.Bhoi 3 1 Assi.Professor E & Tc Department, Bharati Vidyapeeth s College Of Engg Shivaji University Kolhapur
1 in = 25.4 mm 1 m = ft g = 9.81 m/s 2
 ENGR 122 Section Instructor: Name: Form#: 52 Allowed materials include calculator (without wireless capability), pencil or pen. Honor Statement: On my honor, I promise that I have not received any outside
ENGR 122 Section Instructor: Name: Form#: 52 Allowed materials include calculator (without wireless capability), pencil or pen. Honor Statement: On my honor, I promise that I have not received any outside
This overview summarizes topics described in detail later in this chapter.
 20 Application Environment: Robot Space and Motion Overview This overview summarizes topics described in detail later in this chapter. Describing Space A coordinate system is a way to describe the space
20 Application Environment: Robot Space and Motion Overview This overview summarizes topics described in detail later in this chapter. Describing Space A coordinate system is a way to describe the space
Handy Board MX. page 1
 Handy Board MX The Handy Board MX (Modular extension) was developed as a quick-connect system to help eliminate connection errors, reduce prototyping time, and lower the bar of necessary technical skill.
Handy Board MX The Handy Board MX (Modular extension) was developed as a quick-connect system to help eliminate connection errors, reduce prototyping time, and lower the bar of necessary technical skill.
Experimental study of Redundant Snake Robot Based on Kinematic Model
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 ThD7.5 Experimental study of Redundant Snake Robot Based on Kinematic Model Motoyasu Tanaka and Fumitoshi Matsuno
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 ThD7.5 Experimental study of Redundant Snake Robot Based on Kinematic Model Motoyasu Tanaka and Fumitoshi Matsuno
PROBLEMS AND EXERCISES PROBLEMS
 64 Fundamentals of Kinematics and Dynamics of Machines and Mechanisms PROBLEMS AND EXERCISES PROBLEMS 1. In Figure 1.14c an inverted slider-crank mechanism is shown. b. If the input is the displacement
64 Fundamentals of Kinematics and Dynamics of Machines and Mechanisms PROBLEMS AND EXERCISES PROBLEMS 1. In Figure 1.14c an inverted slider-crank mechanism is shown. b. If the input is the displacement
Fundamentals of Inverse Kinematics Using Scara Robot
 Fundamentals of Inverse Kinematics Using Scara Robot Overview of SCARA Bot: The 2 Degree of freedom (DOF) Selective Compliance Articulate Robotic Arm (SCARA) (Selective Compliance Articulated Robot Arm)
Fundamentals of Inverse Kinematics Using Scara Robot Overview of SCARA Bot: The 2 Degree of freedom (DOF) Selective Compliance Articulate Robotic Arm (SCARA) (Selective Compliance Articulated Robot Arm)
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
An Interactive Software Environment for Gait Generation and Control Design of Sony Legged Robots
 An Interactive Software Environment for Gait Generation and Control Design of Sony Legged Robots Dragos Golubovic and Huosheng Hu Department of Computer Science, University of Essex, Colchester CO4 3SQ,
An Interactive Software Environment for Gait Generation and Control Design of Sony Legged Robots Dragos Golubovic and Huosheng Hu Department of Computer Science, University of Essex, Colchester CO4 3SQ,
Arduino Smart Robot Car Kit User Guide
 User Guide V1.0 04.2017 UCTRONIC Table of Contents 1. Introduction...3 2. Assembly...4 2.1 Arduino Uno R3...4 2.2 HC-SR04 Ultrasonic Sensor Module with Bracket / Holder...5 2.3 L293D Motor Drive Expansion
User Guide V1.0 04.2017 UCTRONIC Table of Contents 1. Introduction...3 2. Assembly...4 2.1 Arduino Uno R3...4 2.2 HC-SR04 Ultrasonic Sensor Module with Bracket / Holder...5 2.3 L293D Motor Drive Expansion
ROBOTICS 9/2/2015. Last and First Name Matricola
 ROBOTICS 9/2/2015 Last and First Name Matricola PART 1 - QUIZ (8 marks) 1. The geometric specification of the robot working space - considers the last 3 degrees of freedom of a manipulator T F - is only
ROBOTICS 9/2/2015 Last and First Name Matricola PART 1 - QUIZ (8 marks) 1. The geometric specification of the robot working space - considers the last 3 degrees of freedom of a manipulator T F - is only
.. bionically inspired robotic joint... oolbox....
 obolink.. bionically inspired robotic joint... oolbox... www.igus.eu/robolink... robolink in research and development The Concept igus offers a toolkit of parts with which to design and build robotic arms.
obolink.. bionically inspired robotic joint... oolbox... www.igus.eu/robolink... robolink in research and development The Concept igus offers a toolkit of parts with which to design and build robotic arms.
Using the Generalized Inverted Pendulum to generate less energy-consuming trajectories for humanoid walking
 Using the Generalized Inverted Pendulum to generate less energy-consuming trajectories for humanoid walking Sahab Omran, Sophie Sakka, Yannick Aoustin To cite this version: Sahab Omran, Sophie Sakka, Yannick
Using the Generalized Inverted Pendulum to generate less energy-consuming trajectories for humanoid walking Sahab Omran, Sophie Sakka, Yannick Aoustin To cite this version: Sahab Omran, Sophie Sakka, Yannick
Online Optimization of Modular Robot Locomotion
 Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 2005 Online Optimization of Modular Robot Locomotion Daniel MARBACH and Auke Jan IJSPEERT Swiss
Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 2005 Online Optimization of Modular Robot Locomotion Daniel MARBACH and Auke Jan IJSPEERT Swiss
Structural synthesis of linkages for quadruped biorobot
 IOP onference Series: Materials Science and Engineering PAPER OPE AESS Structural synthesis of linkages for quadruped biorobot legs To cite this article: O Antonescu et al 16 IOP onf. Ser.: Mater. Sci.
IOP onference Series: Materials Science and Engineering PAPER OPE AESS Structural synthesis of linkages for quadruped biorobot legs To cite this article: O Antonescu et al 16 IOP onf. Ser.: Mater. Sci.
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
1. Introduction Packing list Parts Introduction Uno R3 Board for Arduino Specifications... 6
 Table of Contents Smart Bluetooth Robot Car Kit for Arduino 1. Introduction...4 1.1 Packing list...5 2. Parts Introduction...6 2.1 Uno R3 Board for Arduino...6 2.1.1 Specifications... 6 2.2 HC-SR04 Ultrasonic
Table of Contents Smart Bluetooth Robot Car Kit for Arduino 1. Introduction...4 1.1 Packing list...5 2. Parts Introduction...6 2.1 Uno R3 Board for Arduino...6 2.1.1 Specifications... 6 2.2 HC-SR04 Ultrasonic
Option G 1: Refraction
 Name: Date: Option G 1: Refraction 1. The table below relates to the electromagnetic spectrum. Complete the table by stating the name of the region of the spectrum and the name of a possible source of
Name: Date: Option G 1: Refraction 1. The table below relates to the electromagnetic spectrum. Complete the table by stating the name of the region of the spectrum and the name of a possible source of
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
BeRobot the Robotic Development Kits, Be your Robot
 BeRobot the Robotic Development Kits, Be your Robot (Guinness World Records) About Features Specifications About The BeRobot from Gestream is the current Guinness World Record holder for the smallest robot
BeRobot the Robotic Development Kits, Be your Robot (Guinness World Records) About Features Specifications About The BeRobot from Gestream is the current Guinness World Record holder for the smallest robot
Docking in Self-Reconfigurable Robots
 Docking in Self-Reconfigurable Robots Wei-Min Shen and Peter Will Information Sciences Institute, University of Southern California 4676 Admiralty Way, Marina del Rey, CA 90292, USA {shen,will}@isi.edu
Docking in Self-Reconfigurable Robots Wei-Min Shen and Peter Will Information Sciences Institute, University of Southern California 4676 Admiralty Way, Marina del Rey, CA 90292, USA {shen,will}@isi.edu
Stability control of a wheel-legged mini-rover
 Stability control of a wheel-legged mini-rover C. Grand, F. Ben Amar, F. Plumet and Ph. Bidaud Laboratoire de Robotique de Paris, Université de Paris VI 18, route du Panorama, 92265 Fontenay-Aux-Roses,
Stability control of a wheel-legged mini-rover C. Grand, F. Ben Amar, F. Plumet and Ph. Bidaud Laboratoire de Robotique de Paris, Université de Paris VI 18, route du Panorama, 92265 Fontenay-Aux-Roses,
Major project components: Sensors Robot hardware/software integration Kinematic model generation High-level control
 Status update: Path planning/following for a snake Major project components: Sensors Robot hardware/software integration Kinematic model generation High-level control 2. Optical mouse Optical mouse technology
Status update: Path planning/following for a snake Major project components: Sensors Robot hardware/software integration Kinematic model generation High-level control 2. Optical mouse Optical mouse technology
Section 7.1. Standard position- the vertex of the ray is at the origin and the initial side lies along the positive x-axis.
 1 Section 7.1 I. Definitions Angle Formed by rotating a ray about its endpoint. Initial side Starting point of the ray. Terminal side- Position of the ray after rotation. Vertex of the angle- endpoint
1 Section 7.1 I. Definitions Angle Formed by rotating a ray about its endpoint. Initial side Starting point of the ray. Terminal side- Position of the ray after rotation. Vertex of the angle- endpoint