Deep Multi-Sensor Lane Detection
|
|
|
- Regina Jones
- 5 years ago
- Views:
Transcription
1 Deep Multi-Sensor Lane Detection Min Bai,1,2 Gellert Mattyus,1 Namdar Homayounfar 1,2 Shenlong Wang 1,2 Shrinidhi Kowshika Lakshmikanth 1 Raquel Urtasun 1,2 Abstract Reliable and accurate lane detection has been a long-standing problem in the field of autonomous driving. In recent years, many approaches have been developed that use images (or videos) as input and reason in image space. In this paper we argue that accurate image estimates do not translate to precise 3D lane boundaries, which are the input required by modern motion planning algorithms. To address this issue, we propose a novel deep neural network that takes advantage of both LiDAR and camera sensors and produces very accurate estimates directly in 3D space. We demonstrate the performance of our approach on both highways and in cities, and show very accurate estimates in complex scenarios such as heavy traffic (which produces occlusion), fork, merges and intersections. I. INTRODUCTION Lane detection is one of the fundamental problems in autonomous driving. To drive safely, the vehicle must reliably detect the boundaries of its current lane for accurate localization, while also estimating the nearby lanes for maneuvering. Accurate detections of lane regions can help reduce ambiguities when detecting and tracking other traffic participants. Furthermore, it is an essential component for the automatic creation of high definition maps, as well as error checking and change detection in existing maps. Most approaches to lane detection take an image (or a video) as input and estimate the lane boundaries in image space [1], [2], [3], [4], [5], [6]. In this paper, we argue that accurate results in the camera view may not imply accurate estimates in 3D space. This is due to the fact that the perspective projection of the camera causes the spatial resolution in 3D to decrease drastically with distance from the camera. This is a big issue for modern self driving vehicles as motion planners require a birds eye view representation of the lane topology. We refer the reader to Fig. 2 for an illustration of this problem. The figure shows sample outputs of the state-of-the-art camera based lane detection approach of [2]. Despite very accurate results in camera perspective, the results in 3D are not very accurate. Several approaches that directly use 3D sensors such as LiDAR have been proposed [7], [8], [9], [10], [11], [12]. Although LiDAR gives an unambiguous measurement of 3D points, it is spatially much more sparse when compare to images, especially at long-range. Consequently, many of the proposed methods relied on handcrafted features and strong assumptions, e.g. fitting parabolic curves. Additionally, they 1 MB, GM, NH, SW, SKL, and RU is with Uber Advanced Technologies Group, {mbai3, gmattyus, namdar, slwang, klshrinidhi, urtasun}@uber.com 2 MB, NH, SW, RU is with University of Toronto, {mbai, namdar, slwang, urtasun}@cs.toronto.edu often fall short in reliability, especially in less ideal scenarios like heavy occlusion. While camera-based techniques have been fairly extensively explored, the possibility to exploit the rapid progress in deep learning to boost the accuracy and reliability of lane detectors using LiDAR or multi-sensor input remains open. In this paper we propose a novel deep neural network that takes advantage of both LiDAR and camera sensors and produces very accurate estimates directly in 3D space. Our network can be learned end-to-end, and can produce reliable estimates with any combination of sensors. Importantly, our approach is very efficient and runs in as little as 70ms on a single Titan p GPU when using all sensors. We demonstrate the effectiveness of our approach on two large scale real world datasets containing both highway and city scenes, and show significant improvements over the state-of-the-art. II. RELATED WORK This section discusses the various techniques that have been proposed to tackle the lane detection task. The techniques are grouped by their themes. a) Camera view lane detection: A commonly seen family of solutions reason in the first person perspective of a vehicle. This includes a number of traditional computer vision techniques based on feature extraction using handcrafted methods to identify likely locations of lane markings. Such methods include the use of various edge detection filters [1], corner detection features [13], Haar-like features [14], and clustering [15]. This is then often followed by line or spline fitting with techniques such as RANSAC to yield final lane detections. Some techniques further use conditional random fields to refine the outputs [6]. However, these techniques are often held back by their inability to reason in abstract domains in the presence of heavy occlusion by other traffic participants, varying lighting conditions between day and night scenes, and weather conditions. Additionally, due to the perspective transformation by the camera, far away road and lane markings are simultaneously heavily distorted and reduced in resolution. Recent advances in convolutional neural networks (CNN) have led to a drastic increase in performance in various 2D computer vision tasks. Many methods have been proposed that leverage these powerful models for feature extraction or direct lane detection [2], [3], [4], [5]. Some techniques have been proposed which attempt to detect lanes in the camera view, but additionally use regularities in the 3D space to guide the detections. For example, [16] exploits the fact that lanes are mostly parallel lines in 3D and

2 Fig. 1. Complete network architecture. Our model takes as input information extracted from LiDAR sweeps, and predicts a dense ground height. The input RGB camera image is projected onto the dense ground, and is combined with the LiDAR information to produce lane detections in overhead view 3D view. converge at a vanishing point in the projected image. They use the 2D detections of these vanishing points to further guide their CNN-based lane detection model. Additionally, [17] explored an interesting framework which uses transfer learning methods to improve lane detection performance on different datasets. b) Overhead view lane detection: As will be shown later in our work, reasoning about lanes in the overhead view domain has significant advantages. This setting has previously been explored by [18], where the authors use a siamese CNN to simultaneously reason about both overhead and camera view input. An earlier work by [19] uses perspective mapping to project camera images into an assumed fixed ground plane and a relatively simple neural network model for the related task of road symbol detection. There, they demonstrated the benefits of reasoning in the overhead view as it reduces the perspective distortion of far away road symbols. This scheme is followed by other authors, including [20]. However, these schemes neglect the natural swaying of the ego-vehicle due to its suspension system, as well as inherent sloping of the road. This limits the spatial accuracy of their detections. In contrast, we propose an endto-end trained deep learning model that predicts an accurate ground height estimation as an intermediate step onto which the camera image is projected. c) LiDAR-based lane detection: Several techniques have been proposed using LiDAR measurements as the input [7], [8], [9], [10]. However, these techniques largely do not leverage the recent advances in deep learning. Consequently, they either assign each point a label resulting in only sparse labels, or using some underlying assumption, such as parabolic curve to fit a lane model. Other works have successfully applied CNNs to the task of road segmentation, especially in the overhead view [21]. Our work takes this one step further to show that information from LiDAR is sufficient for dense and accurate lane boundary detections as well. d) Multi-sensor lane detection: Previous works also exploit the use of multiple sensors to boost the performance of lane detection and tracking [11], [12]. However, lane perception only uses the cameras, while LiDAR is used for supplementary tasks such as obstacle masking and curb fitting. Unlike these methods, our approach aggregates information from both sensors to detect lanes in the same output space. III. MULTI-MODEL END-TO-END LANE DETECTION In this section, we propose a new model that produces accurate and reliable lane boundaries in 3D space. Our model combines the strength of camera s dense observations as well as LiDAR s unambiguous 3D measurements. In the following, we first define the input and output parameterization, followed by a description of the architecture of our proposed end-to-end learnable model. We then discuss each individual component in detail as well as how to train our model. A. Parameterization of the Input and Output Our approach is inspired by the observation that performing lane detection in image space can result in large inaccuracies in 3D (especially at long range). To address this issue, we phrase the problem as a dense pixel-wise prediction task in 3D vehicle coordinates, regardless of the type of sensor input employed. This enables the lane detection to directly deliver lane boundaries in the same space in which the motion planning and control system operate. Most existing pixel-wise CNN-based approaches (e.g. [2]) attempt to predict whether or not a given pixel belongs to a lane boundary. However, they disregard the distinction between cases where the detected lane boundary is slightly shifted compared to the ground truth, and cases where the detection is completely spurious or missing. To address this problem, we phrase the output space as the minimum Euclidean distance to the nearest lane boundary at each location. This allows the model to explicitly reason about the relationship of each 3D location and lane boundaries,
![Fig. 2. Illustration of the necessity of reasoning about lane detections in the overhead view. The input camera image overlaid with the predictions from [2] is shown on the left.](/docs-images/90/103934153/images/3-0.jpg "The lane probability output of the model in camera view is shown next, followed by the re-projection of the probability output into overhead view.")



3 Fig. 2. Illustration of the necessity of reasoning about lane detections in the overhead view. The input camera image overlaid with the predictions from [2] is shown on the left. The lane probability output of the model in camera view is shown next, followed by the re-projection of the probability output into overhead view. The lane detections re-projected into overhead view is on the right. Although the lane detections in camera view appear quite accurate, the shortcomings are clearly visible in the overhead view, as the probability output becomes diffuse with increasing distance, and the detected lane boundaries become less accurate. providing an output that encapsulates richer information than class labels. Moreover, the loss is more forgiving to small offsets between the prediction and ground truth. To aid the network s learning, we make a small modification to the distance transform. In particular, we eliminate the unbounded regression problem by thresholding the target value, and invert the distance transform by subtracting it from the threshold itself. As a result, the training target is equal to the threshold at the lane boundary, and decays outward to zero. Our model takes two inputs: a LiDAR point cloud as well as an image of the scene. In particular, we bring the point clouds from five consecutive frames to a common reference frame by correcting for ego-motion. We then rasterize the point clouds to a 3-channel image in Bird s Eye View (BEV) encoding both the intensity and height of the highest point as well as the height of the lowest point in each discretization bin. It is important to note that there may be independently moving objects such as other vehicles in the scene whose motion would not be compensated for. However, by encoding the highest and lowest height in each discretization bin, the network is informed of the regions that contain moving objects. Using this, the network can learn to ignore distracting data, and interpolate where necessary. The second input is the RGB camera image. We refer the reader to Fig. 1 for an illustration of our model. In the next section, we describe our multi-sensor neural network in details. B. Network Architecture. To achieve the goal of simultaneously leverage information from the first person view camera image and the BEV LiDAR image, we must align their domain by re-projecting the camera image into BEV as well. Since our camera is calibrated and fixed to the vehicle, the projection of a point P v = (x v, y v, z v ) T in the vehicle frame is defined by the projection matrix C = K[R v t v ], where K is the camera calibration matrix and R v, t v is the rotation and translation from vehicle to the camera coordinate system. Because the vehicle frame is fixed (i.e. x v, y v are constants), only the z v elevation of the ground has to be estimated online to define the projection from ground into the camera. The simplest solution is to assume that the road is flat and parallel to the vehicle frame, in which case z v would be a constant as well. Unfortunately, real world roads often have significant slopes over large distances. Moreover, the elevation and pitch of the vehicle relative to the ground is constantly changing due to the vehicle s suspensions. Because of the oblique angle, ground regions far away from the vehicle are covered by very few LiDAR measurements. As well, many LiDAR readings do not come from the ground, but rather various obstacles and other traffic participants. From experimentation, we find that these pose significant difficulties when attempting to use traditional robust estimators such as RANSAC to produce a dense ground height estimate. Instead, in this paper we take advantage of deep learning and design a network that estimates dense ground from the sparse LiDAR point cloud, which learns to simultaneously ignore objects above the ground, as well as extrapolate to produce a dense ground surface. Ground Height Estimator: We use a fast convolutional neural net (CNN) based on ResNet50 [22] to predict a dense ground height from the LiDAR input. We reduce the feature dimensions of ResNet50 by a factor of 2 for scales 1 and 2, and a factor of 4 for scales 3 to 5. Additionally, we remove one convolutional block from each of scale 2, 3, and 5. This is followed by large receptive field average pooling inspired by [23]. In particular, we produce three additional feature volumes using pooling with receptive field and stride sizes of 10, 25, and 60, before concatenating the feature volumes with the original output of scale 5. This gives the network the capability to propagate information about the ground height from regions with high LiDAR point density to regions with low density. Next, the feature volume undergoes 3 additional bottleneck residual blocks, before being upsampled using interleaved transposed convolutions and basic residual blocks. The result is a dense ground height image in BEV of size This corresponds to a region of 48 48m at 5cm per pixel. Camera Image Re-projection: We project the camera image to the estimated ground surface using a differentiable warping function [24]. This produces an image warped onto the dense ground height prediction described above. Note that the re-projection process does not explicitly handle 3D occlusions in the ground plane, with pixels of objects above the ground being projected onto the ground surface. However, as markings guiding lane detections are on the
4 ground plane, the locations of detected lanes will be largely unaffected. The result is a re-projected camera image with the same size as the predicted dense ground image above. Combining Re-projected Camera Image with LiDAR: we use a second CNN to leverage both the re-projected camera image and the LiDAR input to produce pixel-wise lane detection results. This module takes as input LiDAR data in the same format as the ground height estimator. We design a second CNN that is largely identical to that used in the dense ground height estimation, with the exception that the feature dimension of scales 3 to 5 are only reduced by a factor of 2 relative to the original ResNet50, with no blocks removed. Moreover, we duplicate scales 1 to 3 at the input without weight sharing such that the re-projected camera image and the LiDAR images are passed into separate input branches. The two streams of information are concatenated at scale 4. The output of this network is our distance transform estimates. C. Model Learning The parameters Θ of the overall model are optimized by minimizing a combination of the lane detection loss and the ground height estimation loss: l model (Θ) = l lane (Θ) + λl gnd (Θ) The lane detection loss l lane is defined by l lane (Θ) = (τ min{d p,gt, τ}) d p,pred 2 p Output Image where d p,gt and d p,pred are the ground truth and predicted distance transform values for pixel p, respectively. τ is a threshold used to cap the distance transform values to a range between [0, τ], as it is unnecessary for the CNN to produce exact distance transform values for regions far away from any lane boundary. Additionally, this is inverted such that the maximum predicted value τ occurs at the lane boundary, and linearly decreases outward to 0. This removes the need for the network to predict a sharp drop-off in distance transform values at the thresholding boundary from τ to 0. The ground height estimation loss l gnd is defined by l gnd (Θ) = p Output Image z p,gt z p,pred In this case, we select the L1 loss to encourage smoothness in the output. IV. EPERIMENTS This section discusses the details of our dataset, evaluation metrics and results. A. Datasets We evaluate our approach on two datasets collected in North America. The first dataset includes highway traffic scenes with 22073, 2572, and 5240 examples in training, validation, and test set, respectively. The second dataset includes city scenes from a medium sized city, with 16918, Fig. 3. Difference between the AP at various distances from vehicle of our LiDAR+Camera model versus the LiDAR-only model. It is evident that the LiDAR+Camera model outperforms the LiDAR-only model at all distances, with the advantage further increasing with distance. 2607, and 5758 examples in the training, validation, and test sets, respectively. The annotations includes the ground truth lane boundaries in both the camera view and overhead view. We use HD maps which contain dense 3D measurements and annotated lane graphs together with a localization system to provide us with dense ground height ground truth for each example. We plan to release this dataset. B. Experimental Setup Here, we describe the details of our training process. We set the loss mixing factor λ = 20. All models are trained using the ADAM [25] optimizer with a learning rate of 1e 4 and a weight decay of 1e 4 with a batch size of 8 until convergence as determined by the validation set loss. Additionally, we select the distance transform value threshold of τ = 30 for all models on highway scenes, and reduced it to τ = 20 for all models in city scenes to account for the closer spacing of lane boundaries in the latter scenario. This corresponds to 1.5m and 1.0m in the overhead view, respectively. We further improve the variations in our dataset by augmenting our dataset. We randomly adjust brightness, contrast, saturation and hue of the camera image, and randomly rotate the birds eye view images. To avoid artifacts in the LiDAR image (e.g. interpolate the height between empty and occupied pixels) we first rotate the 3D points prior to rasterization. C. Metrics We use two sets of metrics to measure the performance of our model. The first set of metrics directly compares the predicted and ground truth inverted truncated distance transforms over the output prediction by computing the L1 and L2 distances. These metrics naturally penalize both false positive and false negative detections of the lanes at a (overhead) pixel level. Additionally, we use a simple method to extract a linebased lane boundary representation by thresholding and

 The detected lane")


 The distance transform output of the model.")


, there may be distracting lines (row 5), and")
.")











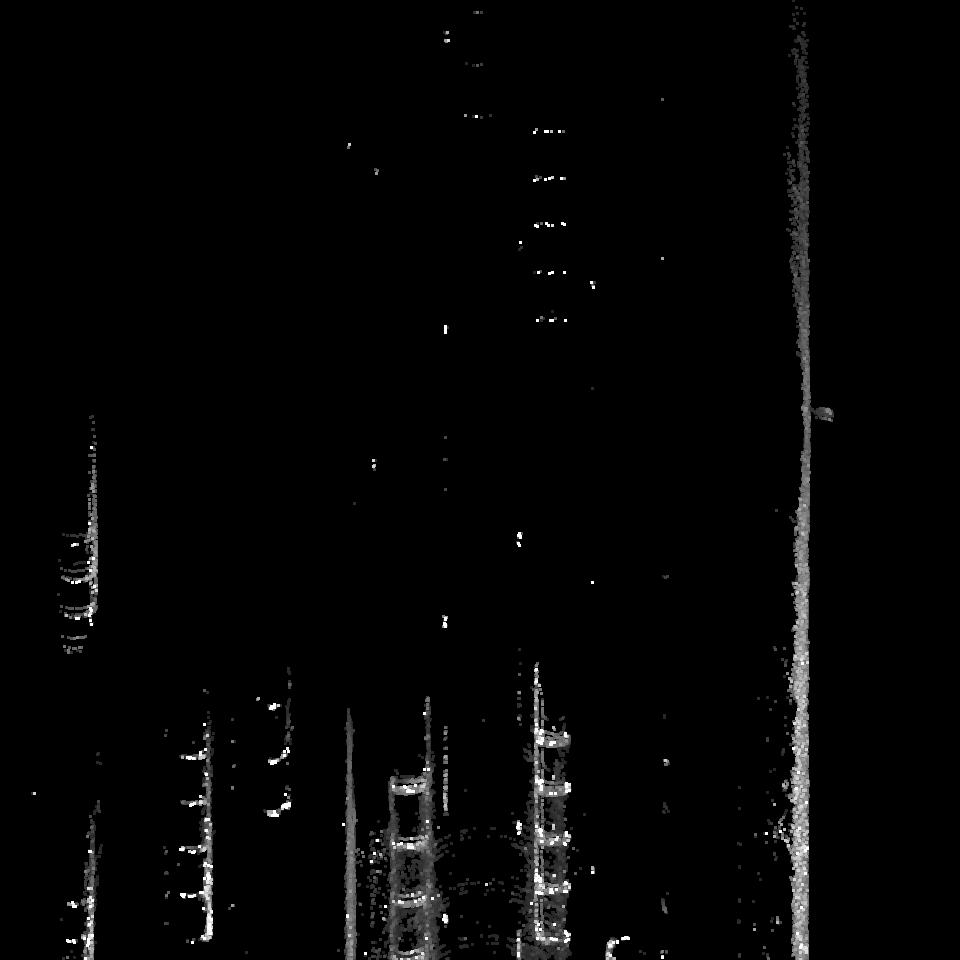

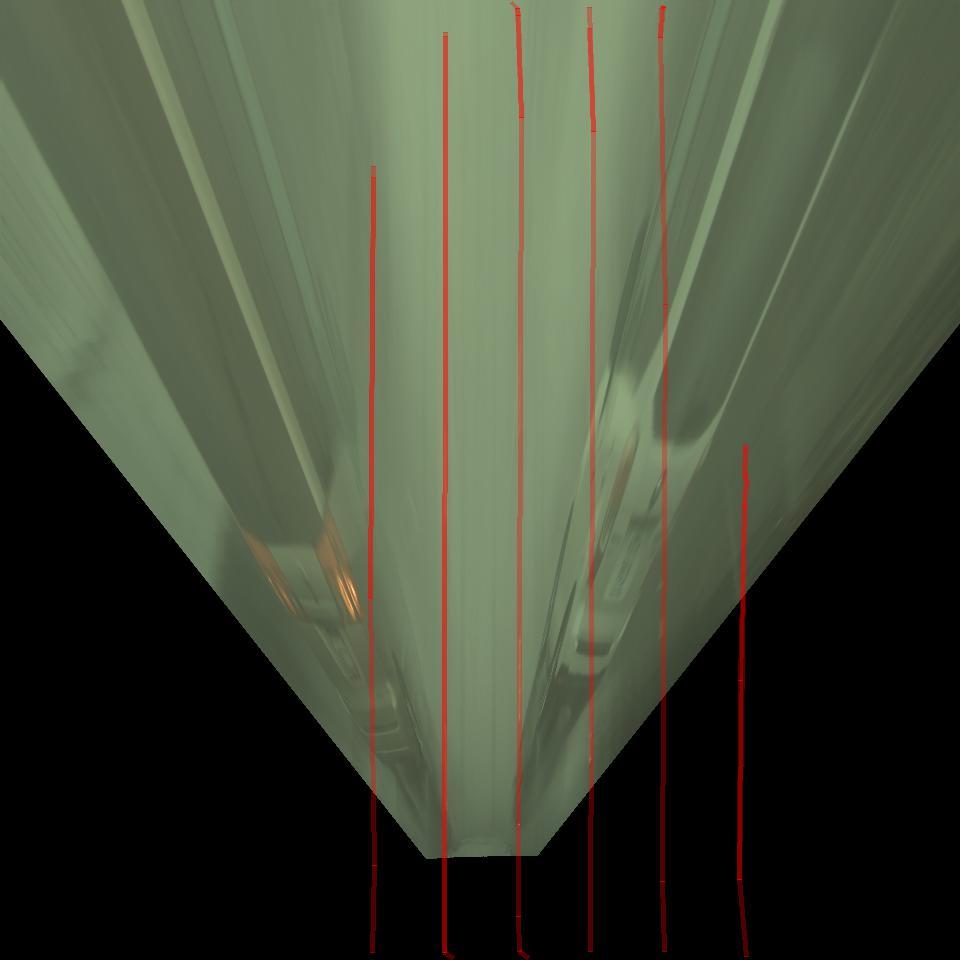
5 Fig. 4. Output of our method using both LiDAR and camera on highways. From left to right: (1) The detected lane distance transforms are naively thresholded are projected into the camera image using the predicted ground height. Lanes are predicted up to 48m ahead. (2) The LiDAR image. (3) The ground truth lanes. (4) The distance transform output of the model. (5) The camera warped to top-down view using the predicted ground overlaid with the predicted lanes (red). Lane detection can be highly non-trivial: vehicles can occlude the lane markings (rows 1-3), there may be distracting lines (row 5), and rain on both the ground and the camera sensor (last row). However, our model is able to leverage to multiple sources of information to produce high quality lane detections. binarizing the predictions at a fixed value. The thresholds are selected to be 20 for the highway model, and 15 for the city model, which are 10 px and 5 px away from the lane boundary, respectively. The result is skeletonized via binary erosion, which is then compared to the ground truth lane boundaries by computing the average precision scores at pixel thresholds ranging from 1 to 9. In the overhead image view, this corresponds to physical distances of 5 cm to 45 cm. Moreover, we evaluate the exact precision and recall values at 5 pixel deviation, or 25 cm in the overhead view. This is a stringent requirement, as in comparison the typical lane marking itself is only 15 cm wide. Finally, we evaluate the correctness of the detected lane topology by finding the number of connected components in the skeletonized prediction, and comparing it with the number of lanes present in the ground truth by computing the absolute difference. This statistic is averaged across all test examples. All results are reported in the test set. D. Analysis We present qualitative and quantitative results of our method in this section. The performance of our complete model in highway and city scenes can be found in the third and sixth rows of Table I. Additionally, sample output images can be found in Fig. 4 and Fig. 5. Moreover, we perform ablation studies to examine the factors influencing the performance of our model, as well as comparing with the current state-of-the-art lane detector of [2].

 The detected")


 The LiDAR image.")
 The distance transform output of the")
 The camera warped to top-down view")
.")





 Sensor Input: we explore the")





6 Fig. 5. Output of our method using both LiDAR and camera in urban areas. From left to right: (1) The detected lane distance transforms are naively thresholded are projected into the camera image using the predicted ground height. Lanes are predicted up to 48m ahead. (2) The LiDAR image. (3) The ground truth lanes. (4) The distance transform output of the model. (5) The camera warped to top-down view using the predicted ground overlaid with the predicted lanes (red). Scenario Camera LiDAR DT L2 (cm2 ) DT L1 (cm) AP 82.9% 78.8% 84.0% 76.7% 75.6% 78.1% 95.0% 91.3% 95.6% 88.3% 86.3% 89.3% 94.0% 89.2% 94.3% 79.0% 72.4% 76.9% Top. Mean Dev TABLE I C OMPARISONS OF TEST SET PERFORMANCE OF LANE DETECTION RESULTS OF USING VARIOUS SENSORS. a) Sensor Input: we explore the performance impact of using information from the camera image, LiDAR, and the combination of both in Table I. It is clear that the performance of the model that leverages both the LiDAR and camera information achieves the highest performance. This is especially true in the highway setting with faster vehicle motion. As a result, the distant regions still have relatively sparse LiDAR points despite aggregating multiple sweeps, while the much denser camera image is able to somewhat compensate for this. In comparison, the LiDAR-only model performs somewhat worse, while the camera-based model returns the lowest performance.
 The detected lane distance transforms are naively thresholded are projected into the")
 The ground truth lanes. (4) The distance transform output of the model.")



 110.4 112.9 130.4 124.")


![b) Comparison with state of the art: we compare the lane detection results using the SCNN model [2] with ours,](/docs-images/90/103934153/images/7-8.jpg "with the results in Table II.")
 to produce lane detections in camera space.")



7 Fig. 6. Failure cases due to rain, occlusions and missing lane markings. From left to right: (1) The detected lane distance transforms are naively thresholded are projected into the camera image using the predicted ground height. Lanes are predicted up to 48m ahead. (2) The LiDAR image. (3) The ground truth lanes. (4) The distance transform output of the model. (5) The camera warped to top-down view using the predicted ground overlaid with the predicted lanes (red). AP Lane Config 2 lanes 3 lanes 4 lanes 5 lanes 6 lanes or more SCNN compatible SCNN 64.7% 48.1% 67.9% 66.2% 66.4% 59.5% Ours 85.5% 78.6% 84.2% 82.8% 82.7% 84.7% SCNN 75.2% 54.3% 78.4% 76.3% 75.7% 69.1% 25cm Ours 96.9% 90.2% 96.7% 95.3% 94.3% 96.3% SCNN 76.1% 45.5% 52.6% 57.8% 46.8% 72.3% 25cm Ours 95.4% 83.8% 95.5% 94.0% 93.1% 94.3% TABLE II C OMPARISON OF TEST SET PERFORMANCE OF LANE DETECTION WITH THE SCNN MODEL AND OUR L I DAR+C AMERA MODEL IN SCENARIOS WITH DIFFERENT NUMBERS OF LANES. Scenario Ground Height Predicted Ground Truth Predicted Ground Truth DT L2 (cm2 ) DT L1 (cm) AP 78.8% 78.4% 75.6% 74.7% 91.3% 91.0% 86.3% 85.7% 89.2% 88.4% 72.4% 73.4% Top. Mean Dev TABLE III C OMPARISONS OF LANE DETECTION RESULTS USING ONLY RE - PROJECTED CAMERA IMAGE ONTO GROUND TRUTH GROUND HEIGHT VS PREDICTED GROUND HEIGHT. b) Comparison with state of the art: we compare the lane detection results using the SCNN model [2] with ours, with the results in Table II. In particular, we train the SCNN model using the authors provided code on the camera images (as by their design) to produce lane detections in camera space. These detections are then re-projected into overhead view using the ground truth dense ground height and evaluated. While SCNN can only detect the ego lane and the neighboring left and right lanes, our model is able to detect all visible lanes within the 48 meter square. As such, the recall metric for SCNN is low in situations with more lanes. We showcase the performance difference across scenes with varying number of lanes. Because the SCNN detection receives only the image as input which cannot see the ground immediately next to the ego-vehicle, we ignore lanes within 15m of the ego-vehicle for both methods for a fair comparison. Finally, the last row of the table shows the methods evaluated over only scenes that contain an ego lane and at most one lane to the left and right, which is fully within the stated capabilities of SCNN. Our method signifiantly outperforms SCNN in all situations, further validating the effectiveness of our 3D reasoning. c) Evaluation over Distance: because of the foreshortening effect, the density of measurement points falling onto the ground falls off rapidly with the distance from the vehicle. Since LiDAR sweeps have much lower resolution
8 than a camera image, this effect is more pronounced in the former case. To further analyze the benefit of using both camera and LiDAR data compared with using only the latter, we plot the relative average precision of the two models versus distance from the vehicle, as shown in Fig. 3. It is clear that in both scenarios, the performance of the former model exceeds that of the latter. This performance gap is especially large at the longest distance bin, where the number of LiDAR points on the ground is very sparse even with sweep aggregation. This suggests that intelligently combining the information from both sensors will provide the best lane detections. d) Ground height prediction: our model is able to predict the ground height onto which the camera images are projected. In Table III we explore the performance gains possible if the accuracy of ground height estimation is improved by substituting the predictions with ground truth. For this experiment, we only provide the LiDAR BEV image to the ground height estimator so that the model can only perform lane detection using the re-projected camera image. We see that the performance is very similar when using estimated and perfect ground. e) Qualitative Analysis: in Fig. 4 and Fig. 5, we see a number of examples where the lane detections are very accurate. The high level of performance is achieved in a variety of scenarios including with complex lane geometries (large number of lanes or merges and exits), as well as occlusions by other vehicles. Moreover, the alignment of the lanes in both the camera view and in BEV are seen to be of high quality. The performance of the lane detector in adverse scenarios in Fig. 4 such as darkness, rain, and fog suggests that the model is able to perform in a variety of situations. Finally, the smoothness of the predicted lane boundaries is noteworthy, and highly beneficial to the consumers of the detection results. f) Failure modes: despite the generally very accurate lane detections, there are a few failure modes of our model. These can be seen in Fig. 6. The first row shows a case where the heavy rain causes significantly reduced visibility, especially at a distance. In the second row, large vehicles block the view of the ground for both sensors, showing the negative impact of heavy occlusions. Finally, the third image shows a case where the lane boundaries do not have actual paint in reality. In these scenarios, more advanced models are required to infer the virtual lane boundaries. V. CONCLUSION In this paper we have argued that accurate image estimates do not translate to precise 3D lane boundaries, which are the input required by modern motion planning algorithms. To address this issue, we have proposed a novel deep neural network that takes advantage of both LiDAR and camera sensors and produces very accurate estimates directly in 3D space. We have demonstrated the performance of our approach on two challenging real world datasets containing both highway and city scenes, showing its superiority when compared to the state of the art. In the future we plan to reason about lane attributes such as lane types and other road elements such as crosswalks. REFERENCES [1] M. Haloi and D. B. Jayagopi, A robust lane detection and departure warning system, in IV, [2]. Pan, J. Shi, P. Luo,. Wang, and. Tang, Spatial as deep: Spatial cnn for traffic scene understanding, in AAAI, [3] J. Kim and C. Park, End-to-end ego lane estimation based on sequential transfer learning for self-driving cars, in CVPR Workshop, [4] B. Huval, T. Wang, S. Tandon, J. Kiske, W. Song, J. Pazhayampallil, Mykhaylo, Andriluka, P. Rajpurkar, T. Migimatsu, R. Cheng-Yue, F. Mujica, A. Coates, and A. Y. Ng, An empirical evaluation of deep learning on highway driving, ariv, [5] O. Bailo, S. Lee, F. Rameau, J. S. Yoon, and I. S. Kweon, Robust road marking detection and recognition using density-based grouping and machine learning techniques, in WACV, [6] J. Hur, S.-N. Kang, and S.-W. Seo, Multi-lane detection in urban driving environments using conditional random fields, in IV, [7] S. Kammel and B. Pitzer, Lidar-based lane marker detection and mapping, in IV, [8] P. Lindner, E. Richter, G. W. an Kiyozaku Takagi, and A. Isogai, Multi-channel lidar processing for lane detection and estimation, in ITSC, [9] M. Thuy and F. P. Leon, Lane detection and tracking based on lidar data, in Metrology and Measurement Systems, [10] A. Hata and D. Wolf, Road marking detection using lidar reflective intensity data and its application to vehicle localization, in ITSC, [11] A. S. Huang and S. Teller, Probabilistic lane estimation using basis curves, in RSS, [12] A. S. Huang, D. Moore, M. Antone, E. Olson, and S. Teller, Finding multiple lanes in urban road networks with vision and lidar, Autonomous Robots, [13] T. Wu and A. Ranganathan, A practical system for road marking detection and recognition, in IV, [14] H. Jung, J. Min, and J. Kim, An efficient lane detection algorithm for lane departure detection, in IV, [15] F. Zhang, H. Stahle, C. Chen, C. Buckl, and A. Knoll, A lane marking extraction approach based on random finite set statistics, in IV, [16] S. Lee, J. Kim, J. S. Yoon, S. Shin, O. Bailo, N. Kim, T.-H. Lee, H. S. Hong, S.-H. Han, and I. S. Kweon, Vpgnet: Vanishing point guided network for lane and road marking detection and recognition, in ICCV, [17] A. Gurghian, T. Koduri, S. V. Bailur, K. J. Carey, and V. N. Murali, Deeplanes: End-to-end lane position estimation using deep neural networks, in CVPR Workshop, [18] B. He, R. Ai, Y. Yan, and. Lang, Accurate and robust lane detection based on dual-view convolutional neutral network, in IV, [19] A. Kheyrollahi and T. P. Breckon, Automatic real-time road marking recognition using a feature driven approach, Machine Vision and Applications, vol. 23, [20] D. Hyeon, S. Lee, S. Jung, S.-W. Kim, and S.-W. Seo, Robust road marking detection using convex grouping method in around-view monitoring system, in IV, [21] L. Caltagirone, S. Scheidegger, L. Svensson, and M. Wahde, Fast lidar-based road detection using fully convolutional neural networks, in IV, [22] K. He,. Zhang, S. Ren, and J. Sun, Deep residual learning for image recognition, in CVPR, [23] H. Zhao, J. Shi,. Qi,. Wang, and J. Jia, Pyramid scene parsing network, [24] M. Jaderberg, K. Simonyan, A. Zisserman, and K. Kavukcuoglu, Spatial transformer networks, in NIPS, [25] D. Kingma and J. Ba, Adam: A method for stochastic optimization, ICLR, 2015.
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Supplementary Material for SphereNet: Learning Spherical Representations for Detection and Classification in Omnidirectional Images
 Supplementary Material for SphereNet: Learning Spherical Representations for Detection and Classification in Omnidirectional Images Benjamin Coors 1,3, Alexandru Paul Condurache 2,3, and Andreas Geiger
Supplementary Material for SphereNet: Learning Spherical Representations for Detection and Classification in Omnidirectional Images Benjamin Coors 1,3, Alexandru Paul Condurache 2,3, and Andreas Geiger
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Pedestrian Detection Using Correlated Lidar and Image Data EECS442 Final Project Fall 2016
 edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
TorontoCity: Seeing the World with a Million Eyes
 TorontoCity: Seeing the World with a Million Eyes Authors Shenlong Wang, Min Bai, Gellert Mattyus, Hang Chu, Wenjie Luo, Bin Yang Justin Liang, Joel Cheverie, Sanja Fidler, Raquel Urtasun * Project Completed
TorontoCity: Seeing the World with a Million Eyes Authors Shenlong Wang, Min Bai, Gellert Mattyus, Hang Chu, Wenjie Luo, Bin Yang Justin Liang, Joel Cheverie, Sanja Fidler, Raquel Urtasun * Project Completed
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601
 with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601") Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Chapter 9 Object Tracking an Overview
 Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Postprint.
 http://www.diva-portal.org Postprint This is the accepted version of a paper presented at 14th International Conference of the Biometrics Special Interest Group, BIOSIG, Darmstadt, Germany, 9-11 September,
http://www.diva-portal.org Postprint This is the accepted version of a paper presented at 14th International Conference of the Biometrics Special Interest Group, BIOSIG, Darmstadt, Germany, 9-11 September,
Instance-aware Semantic Segmentation via Multi-task Network Cascades
 Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai, Kaiming He, Jian Sun Microsoft research 2016 Yotam Gil Amit Nativ Agenda Introduction Highlights Implementation Further
Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai, Kaiming He, Jian Sun Microsoft research 2016 Yotam Gil Amit Nativ Agenda Introduction Highlights Implementation Further
Supplementary: Cross-modal Deep Variational Hand Pose Estimation
 Supplementary: Cross-modal Deep Variational Hand Pose Estimation Adrian Spurr, Jie Song, Seonwook Park, Otmar Hilliges ETH Zurich {spurra,jsong,spark,otmarh}@inf.ethz.ch Encoder/Decoder Linear(512) Table
Supplementary: Cross-modal Deep Variational Hand Pose Estimation Adrian Spurr, Jie Song, Seonwook Park, Otmar Hilliges ETH Zurich {spurra,jsong,spark,otmarh}@inf.ethz.ch Encoder/Decoder Linear(512) Table
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
 Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
/10/$ IEEE 4048
 21 IEEE International onference on Robotics and Automation Anchorage onvention District May 3-8, 21, Anchorage, Alaska, USA 978-1-4244-54-4/1/$26. 21 IEEE 448 Fig. 2: Example keyframes of the teabox object.
21 IEEE International onference on Robotics and Automation Anchorage onvention District May 3-8, 21, Anchorage, Alaska, USA 978-1-4244-54-4/1/$26. 21 IEEE 448 Fig. 2: Example keyframes of the teabox object.
HDNET: Exploiting HD Maps for 3D Object Detection
 HDNET: Exploiting HD Maps for 3D Object Detection Bin Yang 1,2 Ming Liang 1 Raquel Urtasun 1,2 1 Uber Advanced Technologies Group 2 University of Toronto {byang10, ming.liang, urtasun}@uber.com Abstract:
HDNET: Exploiting HD Maps for 3D Object Detection Bin Yang 1,2 Ming Liang 1 Raquel Urtasun 1,2 1 Uber Advanced Technologies Group 2 University of Toronto {byang10, ming.liang, urtasun}@uber.com Abstract:
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Sensory Augmentation for Increased Awareness of Driving Environment
 Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Supplementary Materials for Learning to Parse Wireframes in Images of Man-Made Environments
 Supplementary Materials for Learning to Parse Wireframes in Images of Man-Made Environments Kun Huang, Yifan Wang, Zihan Zhou 2, Tianjiao Ding, Shenghua Gao, and Yi Ma 3 ShanghaiTech University {huangkun,
Supplementary Materials for Learning to Parse Wireframes in Images of Man-Made Environments Kun Huang, Yifan Wang, Zihan Zhou 2, Tianjiao Ding, Shenghua Gao, and Yi Ma 3 ShanghaiTech University {huangkun,
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Photometric Stereo with Auto-Radiometric Calibration
 Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation
 ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
SurfNet: Generating 3D shape surfaces using deep residual networks-supplementary Material
 SurfNet: Generating 3D shape surfaces using deep residual networks-supplementary Material Ayan Sinha MIT Asim Unmesh IIT Kanpur Qixing Huang UT Austin Karthik Ramani Purdue sinhayan@mit.edu a.unmesh@gmail.com
SurfNet: Generating 3D shape surfaces using deep residual networks-supplementary Material Ayan Sinha MIT Asim Unmesh IIT Kanpur Qixing Huang UT Austin Karthik Ramani Purdue sinhayan@mit.edu a.unmesh@gmail.com
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
A DATA DRIVEN METHOD FOR FLAT ROOF BUILDING RECONSTRUCTION FROM LiDAR POINT CLOUDS
 A DATA DRIVEN METHOD FOR FLAT ROOF BUILDING RECONSTRUCTION FROM LiDAR POINT CLOUDS A. Mahphood, H. Arefi *, School of Surveying and Geospatial Engineering, College of Engineering, University of Tehran,
A DATA DRIVEN METHOD FOR FLAT ROOF BUILDING RECONSTRUCTION FROM LiDAR POINT CLOUDS A. Mahphood, H. Arefi *, School of Surveying and Geospatial Engineering, College of Engineering, University of Tehran,
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Supplementary Material for Ensemble Diffusion for Retrieval
 Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
A Keypoint Descriptor Inspired by Retinal Computation
 A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
Real-Time Detection of Road Markings for Driving Assistance Applications
 Real-Time Detection of Road Markings for Driving Assistance Applications Ioana Maria Chira, Ancuta Chibulcutean Students, Faculty of Automation and Computer Science Technical University of Cluj-Napoca
Real-Time Detection of Road Markings for Driving Assistance Applications Ioana Maria Chira, Ancuta Chibulcutean Students, Faculty of Automation and Computer Science Technical University of Cluj-Napoca
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation
 AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
FOOTPRINTS EXTRACTION
 Building Footprints Extraction of Dense Residential Areas from LiDAR data KyoHyouk Kim and Jie Shan Purdue University School of Civil Engineering 550 Stadium Mall Drive West Lafayette, IN 47907, USA {kim458,
Building Footprints Extraction of Dense Residential Areas from LiDAR data KyoHyouk Kim and Jie Shan Purdue University School of Civil Engineering 550 Stadium Mall Drive West Lafayette, IN 47907, USA {kim458,
Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving assistance applications on smart mobile devices
 Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Joint Vanishing Point Extraction and Tracking. 9. June 2015 CVPR 2015 Till Kroeger, Dengxin Dai, Luc Van Gool, Computer Vision ETH Zürich
 Joint Vanishing Point Extraction and Tracking 9. June 2015 CVPR 2015 Till Kroeger, Dengxin Dai, Luc Van Gool, Computer Vision Lab @ ETH Zürich Definition: Vanishing Point = Intersection of 2D line segments,
Joint Vanishing Point Extraction and Tracking 9. June 2015 CVPR 2015 Till Kroeger, Dengxin Dai, Luc Van Gool, Computer Vision Lab @ ETH Zürich Definition: Vanishing Point = Intersection of 2D line segments,
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots
 3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry
 cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry Steven Scher December 2, 2004 Steven Scher SteveScher@alumni.princeton.edu Abstract Three-dimensional
cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry Steven Scher December 2, 2004 Steven Scher SteveScher@alumni.princeton.edu Abstract Three-dimensional
Viewpoint Invariant Features from Single Images Using 3D Geometry
 Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Combining PGMs and Discriminative Models for Upper Body Pose Detection
 Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
arxiv: v2 [cs.cv] 14 May 2018
![arxiv: v2 [cs.cv] 14 May 2018](/thumbs/79/79495201.jpg "arxiv: v2 [cs.cv] 14 May 2018") ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Geometric Rectification of Remote Sensing Images
 Geometric Rectification of Remote Sensing Images Airborne TerrestriaL Applications Sensor (ATLAS) Nine flight paths were recorded over the city of Providence. 1 True color ATLAS image (bands 4, 2, 1 in
Geometric Rectification of Remote Sensing Images Airborne TerrestriaL Applications Sensor (ATLAS) Nine flight paths were recorded over the city of Providence. 1 True color ATLAS image (bands 4, 2, 1 in
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
ROBUST LINE-BASED CALIBRATION OF LENS DISTORTION FROM A SINGLE VIEW
 ROBUST LINE-BASED CALIBRATION OF LENS DISTORTION FROM A SINGLE VIEW Thorsten Thormählen, Hellward Broszio, Ingolf Wassermann thormae@tnt.uni-hannover.de University of Hannover, Information Technology Laboratory,
ROBUST LINE-BASED CALIBRATION OF LENS DISTORTION FROM A SINGLE VIEW Thorsten Thormählen, Hellward Broszio, Ingolf Wassermann thormae@tnt.uni-hannover.de University of Hannover, Information Technology Laboratory,
Mask R-CNN. By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi
 Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material
 Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Background subtraction in people detection framework for RGB-D cameras
 Background subtraction in people detection framework for RGB-D cameras Anh-Tuan Nghiem, Francois Bremond INRIA-Sophia Antipolis 2004 Route des Lucioles, 06902 Valbonne, France nghiemtuan@gmail.com, Francois.Bremond@inria.fr
Background subtraction in people detection framework for RGB-D cameras Anh-Tuan Nghiem, Francois Bremond INRIA-Sophia Antipolis 2004 Route des Lucioles, 06902 Valbonne, France nghiemtuan@gmail.com, Francois.Bremond@inria.fr
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm
 CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Mask R-CNN. Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018
 Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION
 2012 IEEE International Conference on Multimedia and Expo Workshops DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION Yasir Salih and Aamir S. Malik, Senior Member IEEE Centre for Intelligent
2012 IEEE International Conference on Multimedia and Expo Workshops DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION Yasir Salih and Aamir S. Malik, Senior Member IEEE Centre for Intelligent
arxiv: v2 [cs.cv] 7 May 2018
![arxiv: v2 [cs.cv] 7 May 2018](/thumbs/89/99975542.jpg "arxiv: v2 [cs.cv] 7 May 2018") VH-HFCN based Parking Slot and Lane Markings Segmentation on Panoramic Surround View Yan Wu, Tao Yang, Junqiao Zhao, Linting Guan and Wei Jiang arxiv:1804.07027v2 [cs.cv] 7 May 2018 Abstract The automatic
VH-HFCN based Parking Slot and Lane Markings Segmentation on Panoramic Surround View Yan Wu, Tao Yang, Junqiao Zhao, Linting Guan and Wei Jiang arxiv:1804.07027v2 [cs.cv] 7 May 2018 Abstract The automatic
Car tracking in tunnels
 Czech Pattern Recognition Workshop 2000, Tomáš Svoboda (Ed.) Peršlák, Czech Republic, February 2 4, 2000 Czech Pattern Recognition Society Car tracking in tunnels Roman Pflugfelder and Horst Bischof Pattern
Czech Pattern Recognition Workshop 2000, Tomáš Svoboda (Ed.) Peršlák, Czech Republic, February 2 4, 2000 Czech Pattern Recognition Society Car tracking in tunnels Roman Pflugfelder and Horst Bischof Pattern
Using temporal seeding to constrain the disparity search range in stereo matching
 Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling
 [DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
[DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
Definition, Detection, and Evaluation of Meeting Events in Airport Surveillance Videos
 Definition, Detection, and Evaluation of Meeting Events in Airport Surveillance Videos Sung Chun Lee, Chang Huang, and Ram Nevatia University of Southern California, Los Angeles, CA 90089, USA sungchun@usc.edu,
Definition, Detection, and Evaluation of Meeting Events in Airport Surveillance Videos Sung Chun Lee, Chang Huang, and Ram Nevatia University of Southern California, Los Angeles, CA 90089, USA sungchun@usc.edu,
Detecting and Identifying Moving Objects in Real-Time
 Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
Medical images, segmentation and analysis
 Medical images, segmentation and analysis ImageLab group http://imagelab.ing.unimo.it Università degli Studi di Modena e Reggio Emilia Medical Images Macroscopic Dermoscopic ELM enhance the features of
Medical images, segmentation and analysis ImageLab group http://imagelab.ing.unimo.it Università degli Studi di Modena e Reggio Emilia Medical Images Macroscopic Dermoscopic ELM enhance the features of
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
Hierarchical Recurrent Attention Networks for Structured Online Maps
 Hierarchical Recurrent Attention Networks for Structured Online Maps Namdar Homayounfar, Wei-Chiu Ma, Shrinidhi Kowshika Lakshmikanth, Raquel Urtasun Uber ATG Toronto {namdar,weichiu,klshrinidhi,urtasun}@uber.com
Hierarchical Recurrent Attention Networks for Structured Online Maps Namdar Homayounfar, Wei-Chiu Ma, Shrinidhi Kowshika Lakshmikanth, Raquel Urtasun Uber ATG Toronto {namdar,weichiu,klshrinidhi,urtasun}@uber.com
Facial Expression Classification with Random Filters Feature Extraction
 Facial Expression Classification with Random Filters Feature Extraction Mengye Ren Facial Monkey mren@cs.toronto.edu Zhi Hao Luo It s Me lzh@cs.toronto.edu I. ABSTRACT In our work, we attempted to tackle
Facial Expression Classification with Random Filters Feature Extraction Mengye Ren Facial Monkey mren@cs.toronto.edu Zhi Hao Luo It s Me lzh@cs.toronto.edu I. ABSTRACT In our work, we attempted to tackle
Scene Segmentation in Adverse Vision Conditions
 Scene Segmentation in Adverse Vision Conditions Evgeny Levinkov Max Planck Institute for Informatics, Saarbrücken, Germany levinkov@mpi-inf.mpg.de Abstract. Semantic road labeling is a key component of
Scene Segmentation in Adverse Vision Conditions Evgeny Levinkov Max Planck Institute for Informatics, Saarbrücken, Germany levinkov@mpi-inf.mpg.de Abstract. Semantic road labeling is a key component of
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models
 One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction
 Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Automatic Tracking of Moving Objects in Video for Surveillance Applications
 Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot
 Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot Yoichi Nakaguro Sirindhorn International Institute of Technology, Thammasat University P.O. Box 22, Thammasat-Rangsit Post Office,
Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot Yoichi Nakaguro Sirindhorn International Institute of Technology, Thammasat University P.O. Box 22, Thammasat-Rangsit Post Office,
Exploring Curve Fitting for Fingers in Egocentric Images
 Exploring Curve Fitting for Fingers in Egocentric Images Akanksha Saran Robotics Institute, Carnegie Mellon University 16-811: Math Fundamentals for Robotics Final Project Report Email: asaran@andrew.cmu.edu
Exploring Curve Fitting for Fingers in Egocentric Images Akanksha Saran Robotics Institute, Carnegie Mellon University 16-811: Math Fundamentals for Robotics Final Project Report Email: asaran@andrew.cmu.edu
Joint Object Detection and Viewpoint Estimation using CNN features
 Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos
 Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos Kihyuk Sohn 1 Sifei Liu 2 Guangyu Zhong 3 Xiang Yu 1 Ming-Hsuan Yang 2 Manmohan Chandraker 1,4 1 NEC Labs
Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos Kihyuk Sohn 1 Sifei Liu 2 Guangyu Zhong 3 Xiang Yu 1 Ming-Hsuan Yang 2 Manmohan Chandraker 1,4 1 NEC Labs