Training models for road scene understanding with automated ground truth Dan Levi
|
|
|
- Reynard Hart
- 6 years ago
- Views:
Transcription

1 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder, Tomer Peer


")





2 GM Advanced Technical Center in Israel (ATCI)
3 Agenda Road scene understanding Acquiring training data with automated ground truth (AGT) Test cases: General obstacle detection Road segmentation General obstacle classification Curb detection Freespace Challenges and limitations Summary and future work

 General obstacles:")
4 On-board road scene understanding Static: Road edge Road markings, complex lane understanding Signs Obstacles: clutter, construction zone cones Dynamic: Classified objects (cars, pedestrians, bicycles, animals ) General obstacles: animals, carts
5 Obstacle detection: general and category based
 3D sensors (Stereo,")
6 General obstacles, freespace, road segmentation - Road segmentation (vision) Mono-camera using semantic segmentation - General obstacle detection - Freespace (all non-flat road delimiters) 3D sensors (Stereo, Lidar)

7 Training Data Revisiting Unreasonable Effectiveness of Data in Deep Learning Era [Sun et al. 2017]

8 Manual Annotation The Cityscapes Dataset for Semantic Urban Scene Understanding [Cordts et al. 2016] Time: ~60 min per image ~1000 annotators

9 Computer graphics simulated data Photo-realism Scenario generation

10 Simulated data for optical flow FlowNet: Learning Optical Flow with Convolutional Networks [Dosovitskiy et. al. 2015]
11 Automated ground truth(agt) / Cross-sensor learning Velodyne LIDAR

12 Depth from a single image Semi-Supervised Deep Learning for Monocular Depth Map Prediction [Kuznietsov et al. 2017]

13 Map supervised road detection Map-supervised road detection [Laddha et al. 2016]


14 AGT for road scene understanding general setup Supervising sensors Target sensors Perquisite: Full alignment and synchronization between sensors




15 AGT for road scene understanding: scheme Supervising sensors: Target sensors: Task: object detection Data AGT: 1. Compute Task on Supervising sensors: - Offline - Temporal AGT: 2. Project output to target sensor domain Ground truth
16 Automated ground truth / Cross-sensor learning 1. Solve an easier problem - Run time - Completeness 2. Promise - Scalability - Continuous (un-bounded) improvement 1. Challenging setup 2. Annotation quality / accuracy 3. Inherent limitations of supervisor : - Learning beyond supervisor capabilities - Learning from the same sensor (bootstrapping)
17 Supervising sensors: Velodyne HDL64 AGT for General obstacle detection Target sensors: Front camera Task: General obs. Det. Data AGT Ground truth
18 StixelNet: Monocular obstacle detection Levi, Dan, Noa Garnett, Ethan Fetaya. StixelNet : A Deep Convolutional Network for Obstacle Detection and Road Segmentation. In BMVC 2015.


19 StixelNet column based approach INPUT OUTPUT

20 AGT for obstacle detection version I KITTI Dataset [Geiger et al. 2013]
 and 800 test.")
21 AGT for obstacle detection version I Velodyne LIDAR Raw images: 56 sequences (50 Train, 6 Test). 6,000 train images (every 5 th frame) and 800 test. Ground truth result: After GT: 331K training columns and 57K testing

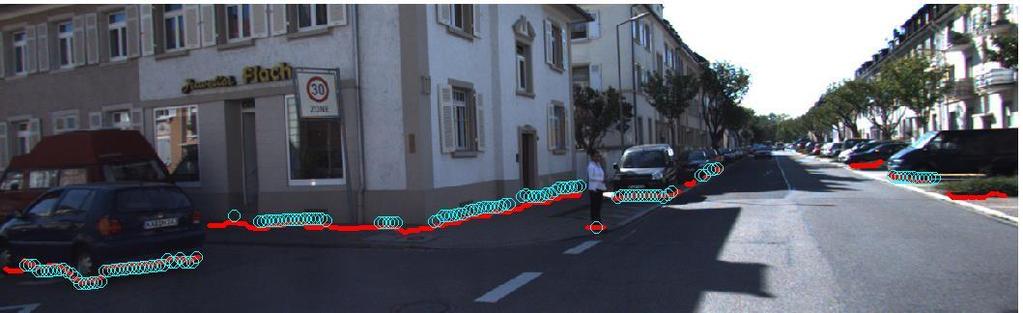
22 AGT for general obstacles in image plane 1. Project Lidar points to image plane 2. Interpolate depth to all pixels 3. Find columns with depth profile typical to transition: road roughly vertical obstacle Figure taken from [Fernandes et al. 2015]


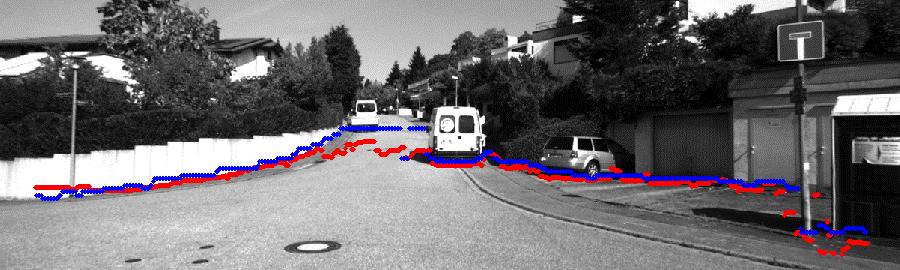
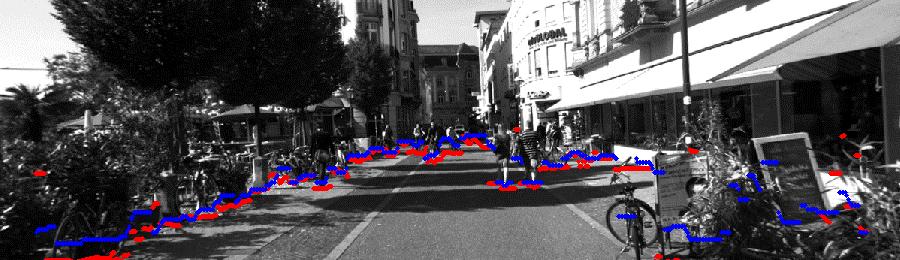
23 General obstacles AGT examples Limitations: - Cannot handle: close obstacles, clear columns - Low coverage (~30%)
 11 200 Max poolin g (4X3) Dense Dense Dense 1024 2048 50 OUTPUT")
24 StixelNet (v1) 5 Layer CNN Layer 1: convolution al Layer 2: convolution al Layer 3: fully connected Layer 4: fully connected Layer 5: fully connected 5 1 INPUT Max poolin g (8X4) Max poolin g (4X3) Dense Dense Dense OUTPUT y

25
26 Experimental Results (Max Probability)

27 Comparison with stereo Stereo [Badino et al. 2009] StixelNet
28 Supervising sensors: AGT for Obstacle classification Target sensors: Front camera Task: Obstacle classification Data AGT Ground truth

29 AGT for obstacle classification Image based detection Lidar based verification Source:

30 Obstacle classification trained net result: pedestrians
31 AGT for General obstacle detection (ver 2) Supervising sensors: Velodyne HDL64 Target sensors: Front camera Task: General obs. Det. Data AGT Ground truth
32 Unified network: StixelNet + Object detection + Object pose estimation Noa Garnett, Shai Silberstein, Shaul Oron, Ethan Fetaya, Uri Verner, Ariel Ayash, Vlad Goldner, Rafi Cohen, Kobi Horn, Dan Levi. Real-time category-based and general obstacle detection for autonomous driving. CVRSUAD Workshop, ICCV2017.





33 Object-centric obstacle detection AGT Estimate and subtract road plane 3D Clustering (objects above 20cm) Detect clear columns: No object above 5cm + far enough returns near obstacles: 1. Below lidar coverage 2. During training Project to image, smooth Bottom contour via dynamic programming

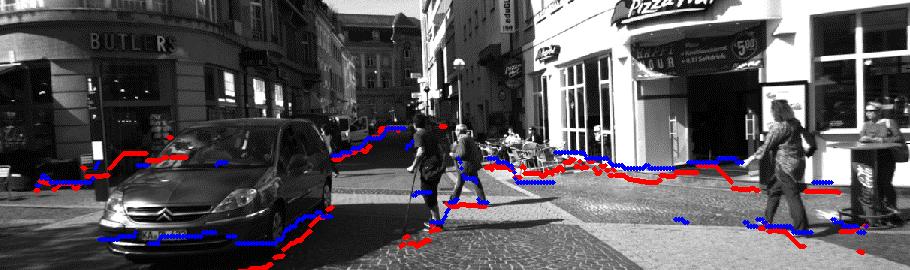
34 General obstacles: old vs. new AGT

 20M Kitti-test 760 11K")
35 New general obstacle dataset with fisheye lens camera #images Kitti--train 6K 5M Internaltrain 16K #instances (columns) 20M Kitti-test K Internal-test K
36 StixelNet2: New network architecture

37 Improved results on KITTI
38 Experimental results with new AGT Old New 0 Kitti - max Pr. Internal - max Pr. kitti - avg. Pr Internal - avg. Pr
39 Experimental results with new AGT Edge cases excluded ( near, clear ) Chart Old New Title Kitti - max Pr. Internal - max Pr. kitti - avg. Pr Internal - avg. Pr
40 Cross dataset generalization kitti-test max kitti-test avg internal-test max internal-test avg Train on KITTI Train on internal Train on both
41 Supervising sensors: AGT for car pose estimation Target sensors: Task: pose estimation IMU Data AGT Ground truth



42 AGT for pose estimation Multi sensor, temporal object detection 8 orientation bins pose representation Source: Dynamic Static


43 Pose estimation trained with mixed AGT and Manual



44 AGT for Curb detection






45 Curb detection trained net result examples
46 Supervising sensors: AGT for freespace Target sensors: Task: freespace Data AGT Ground truth
47 AGT for freespace with 3D beams Estimate and subtract road plane Analyze single Lidar Beam Velodyne Project limit to ground plane Velodyn e scan direction Project freespace limit to image plane, find near and clear


48 Obstacles vs. Freespace AGT

49 Freespace + object detection + car 3D pose

50 Freespace + object detection + car 3D pose

51 Freespace + object detection + car 3D pose

52 Freespace + object detection + car 3D pose

53 Freespace + object detection + car 3D pose
 2. Graph-cut segmentation 3.")
54 Finetuning from AGT: road segmentation 1. Fine-tune on KITTI Road segmentation (manually labelled) 2. Graph-cut segmentation 3. State-of-the-art accuracy among non-anonymous (94.88% MaxF)

55 AGT challenges: How accurate is the AGT?

56 AGT challenges: calibration, synchronization


57 AGT Perception mistakes Non-flat road Assumptions / coverage
58 Thank you!
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder
Real-time category-based and general obstacle detection for autonomous driving
 Real-time category-based and general obstacle detection for autonomous driving Noa Garnett Shai Silberstein Shaul Oron Ethan Fetaya Uri Verner Ariel Ayash Vlad Goldner Rafi Cohen Kobi Horn Dan Levi Advanced
Real-time category-based and general obstacle detection for autonomous driving Noa Garnett Shai Silberstein Shaul Oron Ethan Fetaya Uri Verner Ariel Ayash Vlad Goldner Rafi Cohen Kobi Horn Dan Levi Advanced
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving. Frank Schuster, Dr. Martin Haueis
 Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Visual Perception for Autonomous Driving on the NVIDIA DrivePX2 and using SYNTHIA
 Visual Perception for Autonomous Driving on the NVIDIA DrivePX2 and using SYNTHIA Dr. Juan C. Moure Dr. Antonio Espinosa http://grupsderecerca.uab.cat/hpca4se/en/content/gpu http://adas.cvc.uab.es/elektra/
Visual Perception for Autonomous Driving on the NVIDIA DrivePX2 and using SYNTHIA Dr. Juan C. Moure Dr. Antonio Espinosa http://grupsderecerca.uab.cat/hpca4se/en/content/gpu http://adas.cvc.uab.es/elektra/
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Towards Autonomous Vehicle. What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors
 7 May 2017 Disclaimer Towards Autonomous Vehicle What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors Why Vision Sensors? Humans use both eyes as main sense
7 May 2017 Disclaimer Towards Autonomous Vehicle What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors Why Vision Sensors? Humans use both eyes as main sense
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Collaborative Mapping with Streetlevel Images in the Wild. Yubin Kuang Co-founder and Computer Vision Lead
 Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
Non-flat Road Detection Based on A Local Descriptor
 Non-flat Road Detection Based on A Local Descriptor Kangru Wang, Lei Qu, Lili Chen, Yuzhang Gu, Xiaolin Zhang Abstrct The detection of road surface and free space remains challenging for non-flat plane,
Non-flat Road Detection Based on A Local Descriptor Kangru Wang, Lei Qu, Lili Chen, Yuzhang Gu, Xiaolin Zhang Abstrct The detection of road surface and free space remains challenging for non-flat plane,
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet.
 Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
TorontoCity: Seeing the World with a Million Eyes
 TorontoCity: Seeing the World with a Million Eyes Authors Shenlong Wang, Min Bai, Gellert Mattyus, Hang Chu, Wenjie Luo, Bin Yang Justin Liang, Joel Cheverie, Sanja Fidler, Raquel Urtasun * Project Completed
TorontoCity: Seeing the World with a Million Eyes Authors Shenlong Wang, Min Bai, Gellert Mattyus, Hang Chu, Wenjie Luo, Bin Yang Justin Liang, Joel Cheverie, Sanja Fidler, Raquel Urtasun * Project Completed
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving
 Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving Shmoolik Mangan, PhD Algorithms Development Manager, VAYAVISION AutonomousTech TLV Israel 2018 VAYAVISION s approach
Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving Shmoolik Mangan, PhD Algorithms Development Manager, VAYAVISION AutonomousTech TLV Israel 2018 VAYAVISION s approach
Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
 Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving assistance applications on smart mobile devices
 Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Mask R-CNN. By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi
 Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Self Driving. DNN * * Reinforcement * Unsupervised *
 CNN 응용 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection
CNN 응용 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection
2 OVERVIEW OF RELATED WORK
 Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization
 Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
arxiv: v1 [cs.cv] 16 Mar 2018
![arxiv: v1 [cs.cv] 16 Mar 2018](/thumbs/92/109632247.jpg "arxiv: v1 [cs.cv] 16 Mar 2018") The ApolloScape Dataset for Autonomous Driving Xinyu Huang, Xinjing Cheng, Qichuan Geng, Binbin Cao, Dingfu Zhou, Peng Wang, Yuanqing Lin, and Ruigang Yang arxiv:1803.06184v1 [cs.cv] 16 Mar 2018 Baidu
The ApolloScape Dataset for Autonomous Driving Xinyu Huang, Xinjing Cheng, Qichuan Geng, Binbin Cao, Dingfu Zhou, Peng Wang, Yuanqing Lin, and Ruigang Yang arxiv:1803.06184v1 [cs.cv] 16 Mar 2018 Baidu
LEARNING RIGIDITY IN DYNAMIC SCENES FOR SCENE FLOW ESTIMATION
 LEARNING RIGIDITY IN DYNAMIC SCENES FOR SCENE FLOW ESTIMATION Kihwan Kim, Senior Research Scientist Zhaoyang Lv, Kihwan Kim, Alejandro Troccoli, Deqing Sun, James M. Rehg, Jan Kautz CORRESPENDECES IN COMPUTER
LEARNING RIGIDITY IN DYNAMIC SCENES FOR SCENE FLOW ESTIMATION Kihwan Kim, Senior Research Scientist Zhaoyang Lv, Kihwan Kim, Alejandro Troccoli, Deqing Sun, James M. Rehg, Jan Kautz CORRESPENDECES IN COMPUTER
CONTENT ENGINEERING & VISION LABORATORY. Régis Vinciguerra
 CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
Joint Object Detection and Viewpoint Estimation using CNN features
 Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Pedestrian Detection Using Correlated Lidar and Image Data EECS442 Final Project Fall 2016
 edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss
 UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss AAAI 2018, New Orleans, USA Simon Meister, Junhwa Hur, and Stefan Roth Department of Computer Science, TU Darmstadt 2 Deep
UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss AAAI 2018, New Orleans, USA Simon Meister, Junhwa Hur, and Stefan Roth Department of Computer Science, TU Darmstadt 2 Deep
Amodal and Panoptic Segmentation. Stephanie Liu, Andrew Zhou
 Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
A System for Real-time Detection and Tracking of Vehicles from a Single Car-mounted Camera
 A System for Real-time Detection and Tracking of Vehicles from a Single Car-mounted Camera Claudio Caraffi, Tomas Vojir, Jiri Trefny, Jan Sochman, Jiri Matas Toyota Motor Europe Center for Machine Perception,
A System for Real-time Detection and Tracking of Vehicles from a Single Car-mounted Camera Claudio Caraffi, Tomas Vojir, Jiri Trefny, Jan Sochman, Jiri Matas Toyota Motor Europe Center for Machine Perception,
Realtime Object Detection and Segmentation for HD Mapping
 Realtime Object Detection and Segmentation for HD Mapping William Raveane Lead AI Engineer Bahram Yoosefizonooz Technical Director NavInfo Europe Advanced Research Lab Presented at GTC Europe 2018 AI in
Realtime Object Detection and Segmentation for HD Mapping William Raveane Lead AI Engineer Bahram Yoosefizonooz Technical Director NavInfo Europe Advanced Research Lab Presented at GTC Europe 2018 AI in
Semantic Segmentation
 Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Calibration of a rotating multi-beam Lidar
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
arxiv: v2 [cs.cv] 12 Jul 2018
![arxiv: v2 [cs.cv] 12 Jul 2018](/thumbs/82/86180382.jpg "arxiv: v2 [cs.cv] 12 Jul 2018") The ApolloScape Dataset for Autonomous Driving Xinyu Huang, Xinjing Cheng, Qichuan Geng, Binbin Cao, Dingfu Zhou, Peng Wang, Yuanqing Lin, and Ruigang Yang arxiv:1803.06184v2 [cs.cv] 12 Jul 2018 Baidu
The ApolloScape Dataset for Autonomous Driving Xinyu Huang, Xinjing Cheng, Qichuan Geng, Binbin Cao, Dingfu Zhou, Peng Wang, Yuanqing Lin, and Ruigang Yang arxiv:1803.06184v2 [cs.cv] 12 Jul 2018 Baidu
Camera-based Vehicle Velocity Estimation using Spatiotemporal Depth and Motion Features
 Camera-based Vehicle Velocity Estimation using Spatiotemporal Depth and Motion Features Moritz Kampelmuehler* kampelmuehler@student.tugraz.at Michael Mueller* michael.g.mueller@student.tugraz.at Christoph
Camera-based Vehicle Velocity Estimation using Spatiotemporal Depth and Motion Features Moritz Kampelmuehler* kampelmuehler@student.tugraz.at Michael Mueller* michael.g.mueller@student.tugraz.at Christoph
Automatic Dense Semantic Mapping From Visual Street-level Imagery
 Automatic Dense Semantic Mapping From Visual Street-level Imagery Sunando Sengupta [1], Paul Sturgess [1], Lubor Ladicky [2], Phillip H.S. Torr [1] [1] Oxford Brookes University [2] Visual Geometry Group,
Automatic Dense Semantic Mapping From Visual Street-level Imagery Sunando Sengupta [1], Paul Sturgess [1], Lubor Ladicky [2], Phillip H.S. Torr [1] [1] Oxford Brookes University [2] Visual Geometry Group,
Computing the Stereo Matching Cost with CNN
 University at Austin Figure. The of lefttexas column displays the left input image, while the right column displays the output of our stereo method. Examples are sorted by difficulty, with easy examples
University at Austin Figure. The of lefttexas column displays the left input image, while the right column displays the output of our stereo method. Examples are sorted by difficulty, with easy examples
Cloud-based Large Scale Video Analysis
 Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Ground Plane Detection with a Local Descriptor
 Ground Plane Detection with a Local Descriptor Kangru Wang, Lei Qu, Lili Chen, Yuzhang Gu, Dongchen Zhu, Xiaolin Zhang Shanghai Institute of Microsystem and Information Technology (SIMIT), Chinese Academy
Ground Plane Detection with a Local Descriptor Kangru Wang, Lei Qu, Lili Chen, Yuzhang Gu, Dongchen Zhu, Xiaolin Zhang Shanghai Institute of Microsystem and Information Technology (SIMIT), Chinese Academy
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
From 3D descriptors to monocular 6D pose: what have we learned?
 ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
Team Aware Perception System using Stereo Vision and Radar
 Team Aware Perception System using Stereo Vision and Radar System Development Review 03/ 08 / 2017 Amit Agarwal Harry Golash Yihao Qian Menghan Zhang Zihao (Theo) Zhang Project Description Develop a standalone
Team Aware Perception System using Stereo Vision and Radar System Development Review 03/ 08 / 2017 Amit Agarwal Harry Golash Yihao Qian Menghan Zhang Zihao (Theo) Zhang Project Description Develop a standalone
Visual features detection based on deep neural network in autonomous driving tasks
 430 Fomin I., Gromoshinskii D., Stepanov D. Visual features detection based on deep neural network in autonomous driving tasks Ivan Fomin, Dmitrii Gromoshinskii, Dmitry Stepanov Computer vision lab Russian
430 Fomin I., Gromoshinskii D., Stepanov D. Visual features detection based on deep neural network in autonomous driving tasks Ivan Fomin, Dmitrii Gromoshinskii, Dmitry Stepanov Computer vision lab Russian
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES
 EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES J. Liu 1, S. Ji 1,*, C. Zhang 1, Z. Qin 1 1 School of Remote Sensing and Information Engineering, Wuhan University,
EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES J. Liu 1, S. Ji 1,*, C. Zhang 1, Z. Qin 1 1 School of Remote Sensing and Information Engineering, Wuhan University,
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601
 with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601") Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Object Detection on Self-Driving Cars in China. Lingyun Li
 Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Depth Learning: When Depth Estimation Meets Deep Learning
 Depth Learning: When Depth Estimation Meets Deep Learning Prof. Liang LIN SenseTime Research & Sun Yat-sen University NITRE, June 18, 2018 Outline Part 1. Introduction Motivation Stereo Matching Single
Depth Learning: When Depth Estimation Meets Deep Learning Prof. Liang LIN SenseTime Research & Sun Yat-sen University NITRE, June 18, 2018 Outline Part 1. Introduction Motivation Stereo Matching Single
Automotive 3D Object Detection Without Target Domain Annotations
 Master of Science Thesis in Electrical Engineering Department of Electrical Engineering, Linköping University, 2018 Automotive 3D Object Detection Without Target Domain Annotations Erik Linder-Norén and
Master of Science Thesis in Electrical Engineering Department of Electrical Engineering, Linköping University, 2018 Automotive 3D Object Detection Without Target Domain Annotations Erik Linder-Norén and
Efficient L-Shape Fitting for Vehicle Detection Using Laser Scanners
 Efficient L-Shape Fitting for Vehicle Detection Using Laser Scanners Xiao Zhang, Wenda Xu, Chiyu Dong, John M. Dolan, Electrical and Computer Engineering, Carnegie Mellon University Robotics Institute,
Efficient L-Shape Fitting for Vehicle Detection Using Laser Scanners Xiao Zhang, Wenda Xu, Chiyu Dong, John M. Dolan, Electrical and Computer Engineering, Carnegie Mellon University Robotics Institute,
When Big Datasets are Not Enough: The need for visual virtual worlds.
 When Big Datasets are Not Enough: The need for visual virtual worlds. Alan Yuille Bloomberg Distinguished Professor Departments of Cognitive Science and Computer Science Johns Hopkins University Computational
When Big Datasets are Not Enough: The need for visual virtual worlds. Alan Yuille Bloomberg Distinguished Professor Departments of Cognitive Science and Computer Science Johns Hopkins University Computational
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
On Board 6D Visual Sensors for Intersection Driving Assistance Systems
 On Board 6D Visual Sensors for Intersection Driving Assistance Systems S. Nedevschi, T. Marita, R. Danescu, F. Oniga, S. Bota, I. Haller, C. Pantilie, M. Drulea, C. Golban Sergiu.Nedevschi@cs.utcluj.ro
On Board 6D Visual Sensors for Intersection Driving Assistance Systems S. Nedevschi, T. Marita, R. Danescu, F. Oniga, S. Bota, I. Haller, C. Pantilie, M. Drulea, C. Golban Sergiu.Nedevschi@cs.utcluj.ro
Epipolar geometry-based ego-localization using an in-vehicle monocular camera
 Epipolar geometry-based ego-localization using an in-vehicle monocular camera Haruya Kyutoku 1, Yasutomo Kawanishi 1, Daisuke Deguchi 1, Ichiro Ide 1, Hiroshi Murase 1 1 : Nagoya University, Japan E-mail:
Epipolar geometry-based ego-localization using an in-vehicle monocular camera Haruya Kyutoku 1, Yasutomo Kawanishi 1, Daisuke Deguchi 1, Ichiro Ide 1, Hiroshi Murase 1 1 : Nagoya University, Japan E-mail:
iqmulus/terramobilita benchmark on Urban Analysis
 iqmulus/terramobilita benchmark on Urban Analysis Bruno Vallet, Mathieu Brédif, Béatriz Marcotegui, Andres Serna, Nicolas Paparoditis 1 / 50 Introduction 2 / 50 Introduction Mobile laser scanning (MLS)
iqmulus/terramobilita benchmark on Urban Analysis Bruno Vallet, Mathieu Brédif, Béatriz Marcotegui, Andres Serna, Nicolas Paparoditis 1 / 50 Introduction 2 / 50 Introduction Mobile laser scanning (MLS)
The Hilbert Problems of Computer Vision. Jitendra Malik UC Berkeley & Google, Inc.
 The Hilbert Problems of Computer Vision Jitendra Malik UC Berkeley & Google, Inc. This talk The computational power of the human brain Research is the art of the soluble Hilbert problems, circa 2004 Hilbert
The Hilbert Problems of Computer Vision Jitendra Malik UC Berkeley & Google, Inc. This talk The computational power of the human brain Research is the art of the soluble Hilbert problems, circa 2004 Hilbert
(Deep) Learning for Robot Perception and Navigation. Wolfram Burgard
 Learning for Robot Perception and Navigation. Wolfram Burgard") (Deep) Learning for Robot Perception and Navigation Wolfram Burgard Deep Learning for Robot Perception (and Navigation) Lifeng Bo, Claas Bollen, Thomas Brox, Andreas Eitel, Dieter Fox, Gabriel L. Oliveira,
(Deep) Learning for Robot Perception and Navigation Wolfram Burgard Deep Learning for Robot Perception (and Navigation) Lifeng Bo, Claas Bollen, Thomas Brox, Andreas Eitel, Dieter Fox, Gabriel L. Oliveira,
Simulation: A Must for Autonomous Driving
 Simulation: A Must for Autonomous Driving NVIDIA GTC 2018 (SILICON VALLEY) / Talk ID: S8859 Rohit Ramanna Business Development Manager Smart Virtual Prototyping, ESI North America Rodolphe Tchalekian EMEA
Simulation: A Must for Autonomous Driving NVIDIA GTC 2018 (SILICON VALLEY) / Talk ID: S8859 Rohit Ramanna Business Development Manager Smart Virtual Prototyping, ESI North America Rodolphe Tchalekian EMEA
arxiv: v1 [cs.cv] 4 Aug 2017
![arxiv: v1 [cs.cv] 4 Aug 2017](/thumbs/86/94276091.jpg "arxiv: v1 [cs.cv] 4 Aug 2017") Augmented Reality Meets Computer Vision : Efficient Data Generation for Urban Driving Scenes Hassan Abu Alhaija 1 Siva Karthik Mustikovela 1 Lars Mescheder 2 Andreas Geiger 2,3 Carsten Rother 1 arxiv:1708.01566v1
Augmented Reality Meets Computer Vision : Efficient Data Generation for Urban Driving Scenes Hassan Abu Alhaija 1 Siva Karthik Mustikovela 1 Lars Mescheder 2 Andreas Geiger 2,3 Carsten Rother 1 arxiv:1708.01566v1
S7348: Deep Learning in Ford's Autonomous Vehicles. Bryan Goodman Argo AI 9 May 2017
 S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
Flow Estimation. Min Bai. February 8, University of Toronto. Min Bai (UofT) Flow Estimation February 8, / 47
 Flow Estimation February 8, / 47") Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Mapping with Dynamic-Object Probabilities Calculated from Single 3D Range Scans
 Mapping with Dynamic-Object Probabilities Calculated from Single 3D Range Scans Philipp Ruchti Wolfram Burgard Abstract Various autonomous robotic systems require maps for robust and safe navigation. Particularly
Mapping with Dynamic-Object Probabilities Calculated from Single 3D Range Scans Philipp Ruchti Wolfram Burgard Abstract Various autonomous robotic systems require maps for robust and safe navigation. Particularly
Optical flow. Cordelia Schmid
 Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Perception, Planning, Control, and Coordination for Autonomous Vehicles
 machines Article Perception, Planning, Control, and Coordination for Autonomous Vehicles Scott Drew Pendleton 1, *, Hans Andersen 1, Xinxin Du 2, Xiaotong Shen 2, Malika Meghjani 2, You Hong Eng 2, Daniela
machines Article Perception, Planning, Control, and Coordination for Autonomous Vehicles Scott Drew Pendleton 1, *, Hans Andersen 1, Xinxin Du 2, Xiaotong Shen 2, Malika Meghjani 2, You Hong Eng 2, Daniela
Towards a visual perception system for LNG pipe inspection
 Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Scene Understanding Networks for Autonomous Driving based on Around View Monitoring System
 Scene Understanding Networks for Autonomous Driving based on Around View Monitoring System JeongYeol Baek 1,*, Ioana Veronica Chelu 2,*, Livia Iordache 2, Vlad Paunescu 2, HyunJoo Ryu 1, Alexandru Ghiuta
Scene Understanding Networks for Autonomous Driving based on Around View Monitoring System JeongYeol Baek 1,*, Ioana Veronica Chelu 2,*, Livia Iordache 2, Vlad Paunescu 2, HyunJoo Ryu 1, Alexandru Ghiuta
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems
 Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Image processing techniques for driver assistance. Razvan Itu June 2014, Technical University Cluj-Napoca
 Image processing techniques for driver assistance Razvan Itu June 2014, Technical University Cluj-Napoca Introduction Computer vision & image processing from wiki: any form of signal processing for which
Image processing techniques for driver assistance Razvan Itu June 2014, Technical University Cluj-Napoca Introduction Computer vision & image processing from wiki: any form of signal processing for which
Computer Vision: Making machines see
 Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps
 OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
Hide-and-Seek: Forcing a network to be Meticulous for Weakly-supervised Object and Action Localization
 Hide-and-Seek: Forcing a network to be Meticulous for Weakly-supervised Object and Action Localization Krishna Kumar Singh and Yong Jae Lee University of California, Davis ---- Paper Presentation Yixian
Hide-and-Seek: Forcing a network to be Meticulous for Weakly-supervised Object and Action Localization Krishna Kumar Singh and Yong Jae Lee University of California, Davis ---- Paper Presentation Yixian
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Flow-Based Video Recognition
 Flow-Based Video Recognition Jifeng Dai Visual Computing Group, Microsoft Research Asia Joint work with Xizhou Zhu*, Yuwen Xiong*, Yujie Wang*, Lu Yuan and Yichen Wei (* interns) Talk pipeline Introduction
Flow-Based Video Recognition Jifeng Dai Visual Computing Group, Microsoft Research Asia Joint work with Xizhou Zhu*, Yuwen Xiong*, Yujie Wang*, Lu Yuan and Yichen Wei (* interns) Talk pipeline Introduction
Joint Inference in Image Databases via Dense Correspondence. Michael Rubinstein MIT CSAIL (while interning at Microsoft Research)
") Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Deep Face Recognition. Nathan Sun
 Deep Face Recognition Nathan Sun Why Facial Recognition? Picture ID or video tracking Higher Security for Facial Recognition Software Immensely useful to police in tracking suspects Your face will be an
Deep Face Recognition Nathan Sun Why Facial Recognition? Picture ID or video tracking Higher Security for Facial Recognition Software Immensely useful to police in tracking suspects Your face will be an
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR
 3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle Outline Introduction Preliminaries Approach Volumetric Density Mapping
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle Outline Introduction Preliminaries Approach Volumetric Density Mapping
Stereo Vision Based Traversable Region Detection for Mobile Robots Using U-V-Disparity
 Stereo Vision Based Traversable Region Detection for Mobile Robots Using U-V-Disparity ZHU Xiaozhou, LU Huimin, Member, IEEE, YANG Xingrui, LI Yubo, ZHANG Hui College of Mechatronics and Automation, National
Stereo Vision Based Traversable Region Detection for Mobile Robots Using U-V-Disparity ZHU Xiaozhou, LU Huimin, Member, IEEE, YANG Xingrui, LI Yubo, ZHANG Hui College of Mechatronics and Automation, National
SpatialFuser. Offers support for GNSS and INS navigation systems. Supports multiple remote sensing equipment configurations.
 SPATIALFUSER SpatialFuser SpatialFuser is designed to georeference data acquired by our LiDAR mapping systems into common mapping formats such as LAS/LAZ or GPX. The main purpose of SpatialFuser is to
SPATIALFUSER SpatialFuser SpatialFuser is designed to georeference data acquired by our LiDAR mapping systems into common mapping formats such as LAS/LAZ or GPX. The main purpose of SpatialFuser is to
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
arxiv: v1 [cs.ro] 23 Feb 2018
![arxiv: v1 [cs.ro] 23 Feb 2018](/thumbs/84/89142674.jpg "arxiv: v1 [cs.ro] 23 Feb 2018") IMLS-SLAM: scan-to-model matching based on 3D data Jean-Emmanuel Deschaud 1 1 MINES ParisTech, PSL Research University, Centre for Robotics, 60 Bd St Michel 75006 Paris, France arxiv:1802.08633v1 [cs.ro]
IMLS-SLAM: scan-to-model matching based on 3D data Jean-Emmanuel Deschaud 1 1 MINES ParisTech, PSL Research University, Centre for Robotics, 60 Bd St Michel 75006 Paris, France arxiv:1802.08633v1 [cs.ro]
Computer Vision at Cambridge: Reconstruction,Registration and Recognition
 Computer Vision at Cambridge: Reconstruction,Registration and Recognition Roberto Cipolla Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering
Computer Vision at Cambridge: Reconstruction,Registration and Recognition Roberto Cipolla Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Supplementary Material for Sparsity Invariant CNNs
 Supplementary Material for Sparsity Invariant CNNs Jonas Uhrig,1,2 Nick Schneider,1,3 Lukas Schneider 1,4 Uwe Franke 1 Thomas Brox 2 Andreas Geiger 4,5 1 Daimler R&D Sindelfingen 2 University of Freiburg
Supplementary Material for Sparsity Invariant CNNs Jonas Uhrig,1,2 Nick Schneider,1,3 Lukas Schneider 1,4 Uwe Franke 1 Thomas Brox 2 Andreas Geiger 4,5 1 Daimler R&D Sindelfingen 2 University of Freiburg