Supplementary A. Overview. C. Time and Space Complexity. B. Shape Retrieval. D. Permutation Invariant SOM. B.1. Dataset
|
|
|
- Janice Fleming
- 5 years ago
- Views:
Transcription
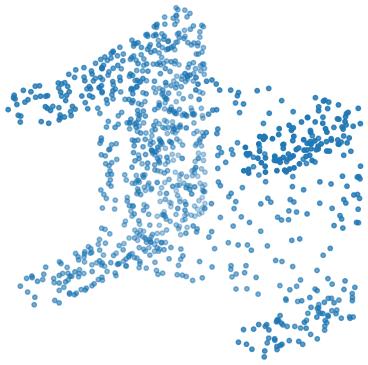
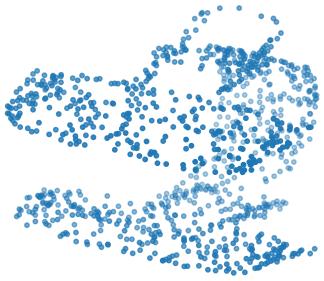
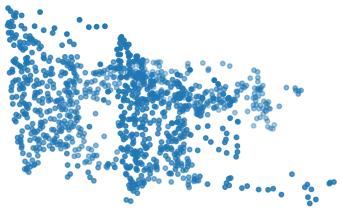
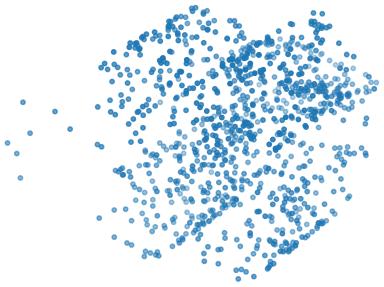
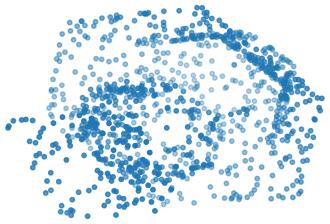
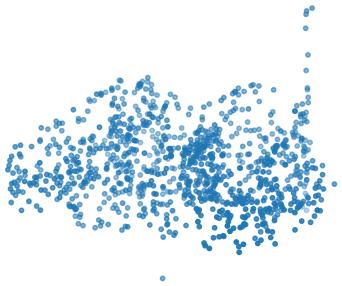
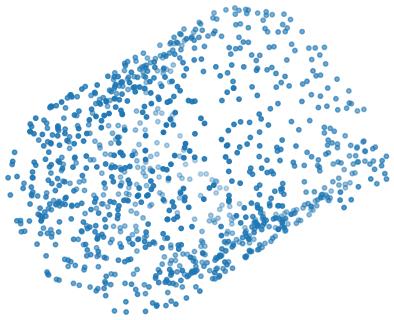
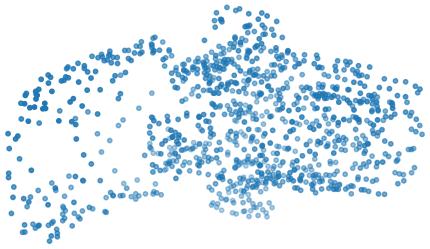
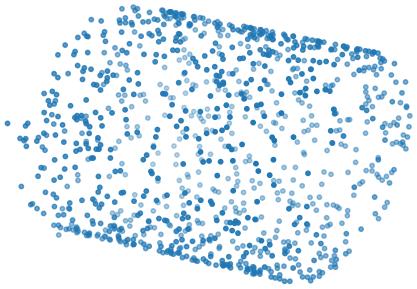
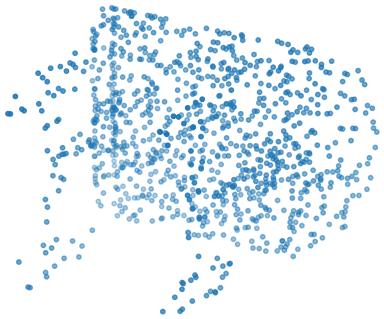
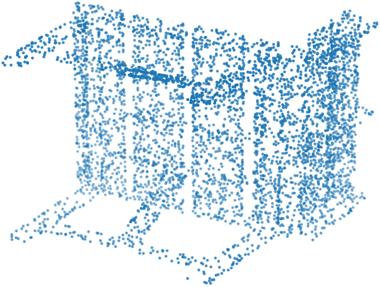
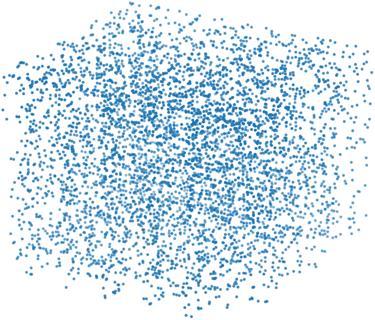
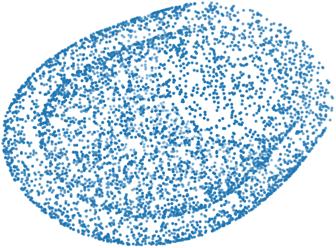
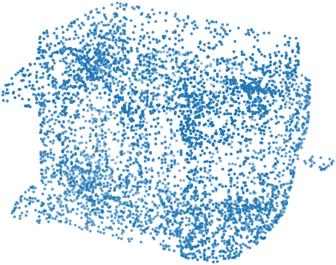
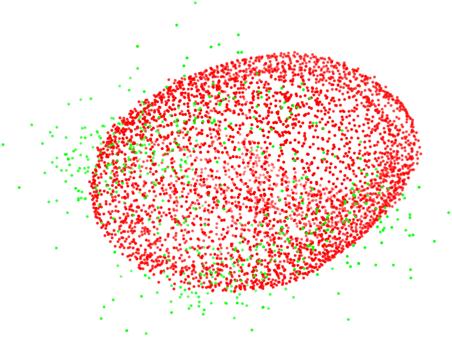
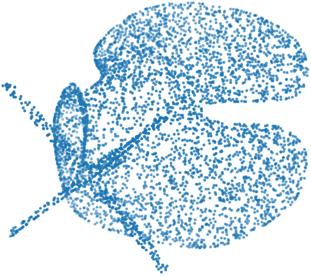
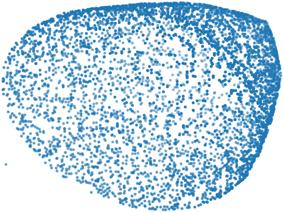
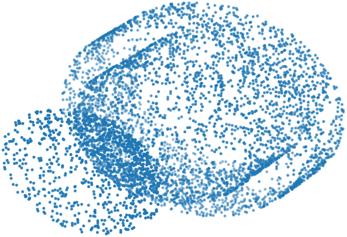
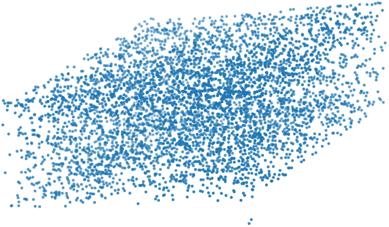
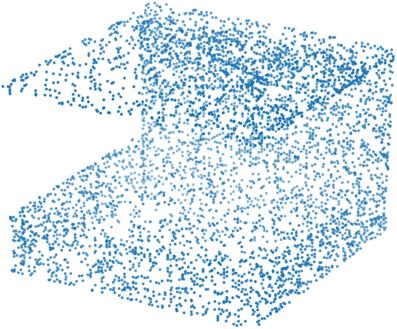
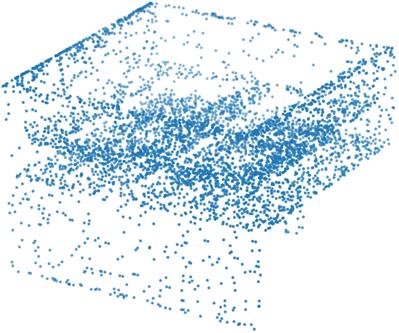
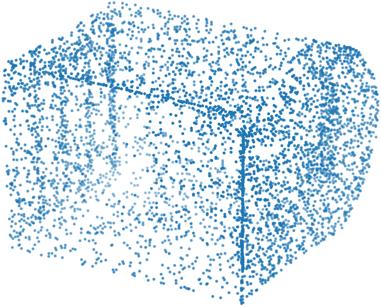
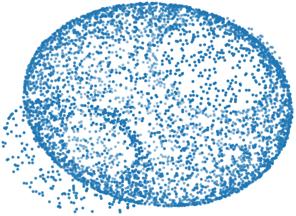
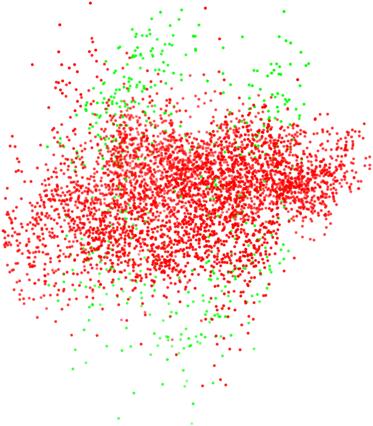
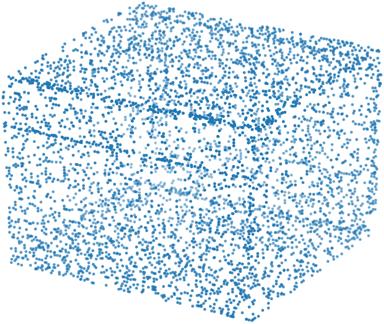
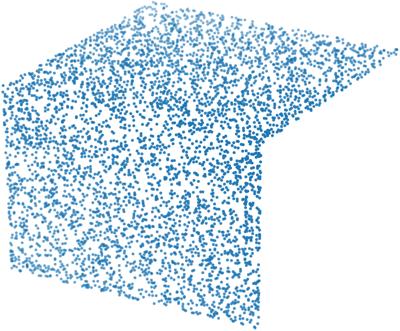
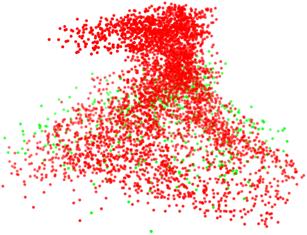
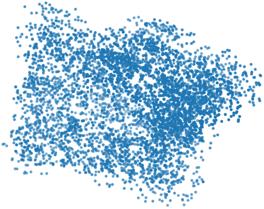
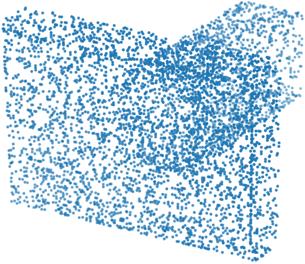
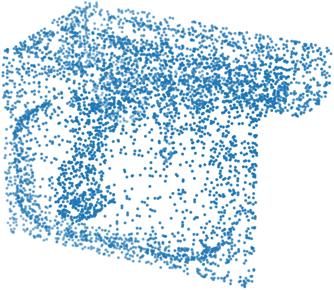
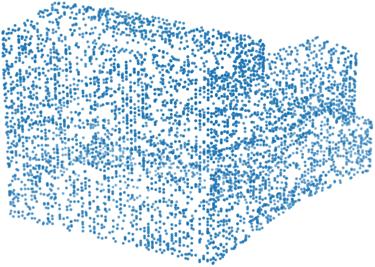
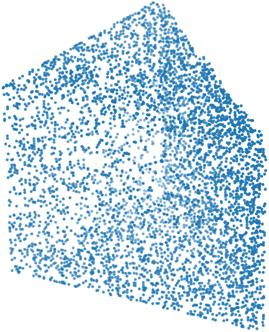
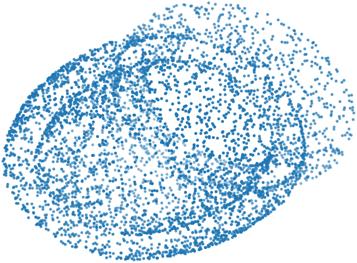
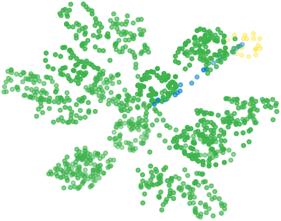
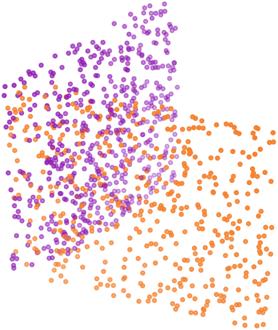
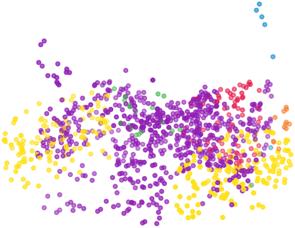
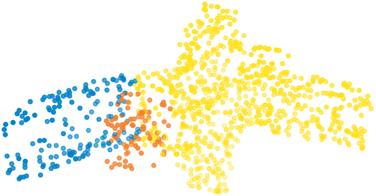
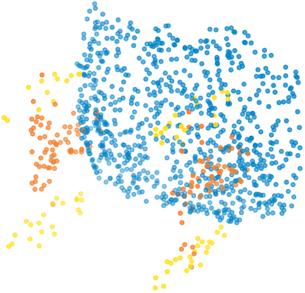
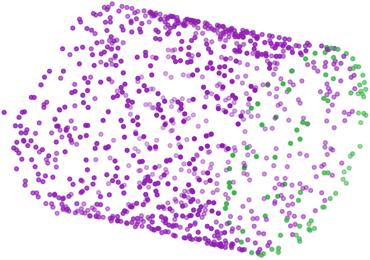
1 Supplementary A. Overview This supplementary document provides more technical details and experimental results to the main paper. Shape retrieval experiments are demonstrated with ShapeNet Core55 dataset in Sec. B. The time and space complexity is analyzed in Sec. C, followed by detailed illustration of our permutation invariant SOM training algorithms in Sec. D. More experiments and results are presented in Sec. E. B. Shape Retrieval Our object classification network can be easily extended to the task of 3D shape retrieval by regarding the classification score as the feature vector. Given a query shape and a shape library, the similarity between the query and the candidates can be computed as their feature vector distances. B.1. Dataset We perform 3D shape retrieval task using the ShapeNet Core55 dataset, which contains 51,19 shapes from 55 categories and 24 subcategories. Specifically, we adopt the dataset split provided by the 3D Shape Retrieval Contest 216 (SHREC16), where 7% of the models are used for training, 1% for validation and 2% for testing. Since the 3D shapes are represented by CAD models, i.e., vertices and faces, we sample 5, points and surface normal vectors from each CAD model. Data augmentation is identical with the previous classification and segmentation experiments - random jitter and scale. B.2. Procedures We train a classification network on the ShapeNet Core55 dataset using identical configurations as our Model- Net4 classification experiment, i.e. a SOM of size 8 8 and k =3. For simplicity, the softmax loss is minimized with only the category labels (without any subcategory information). The classification score vector of length 55 is used as the feature vector. We calculate the L2 feature distance between each shape in the test set and all shapes in the same predicted category from the test set (including itself). The corresponding retrieval list is constructed by sorting these shapes according to the feature distances. B.3. Performance SHREC16 provides several evaluation metrics including Precision-Recall curve, F-score, mean average precision (map), normalized discounted cumulative gain (NDCG). These metrics are computed under two contexts - macro and micro. Macro metric is a simple average across all categories while micro metric is a weighted average according to the number of shapes in each category. As shown in Table 3, our SO-Net out-performs state-of-the-art approaches with most metrics. The precision-recall curves are illustrated in Fig. 9, where SO-Net demonstrates the largest area under curve (AUC). Some shape retrieval results are visualized in Fig. 11. C. Time and Space Complexity We evaluate the model size, forward (inference) time and training time of several point cloud based networks in the task of ModelNet4 classification, as shown in Table 4. The forward timings are acquired with a batch size of 8 and input point cloud size of 124. In the comparison, we choose the networks with the best classification accuracy among various configurations of PointNet and PointNet++, i.e., Point- Net with transformations and PointNet++ with multi-scale grouping (MSG). Because of the parallelizability and simplicity of our network design, our model size is smaller and the training speed is significantly faster compared to Point- Net and its successor PointNet++. Meanwhile, our inference time is around 1/3 of that of PointNet++. D. Permutation Invariant SOM We apply two methods to ensure that the SOM is invariant to the permutation of the input points - fixed initialization and deterministic training rule. D.1. Initialization for SOM Training In addition to permutation invariance, the initialization should be reasonable so that the SOM training is less prone to local minima. Suboptimal SOM may lead to many isolated nodes outside the coverage of the input points. For simplicity, we use fixed initialization for any point cloud input although there are other initialization approaches that are permutation invariant, e.g., principal component initialization. We generate a set of node coordinates that are uniformly distributed in an unit ball to serve as a reasonable initialization because the input point clouds are in various shapes. Unfortunately, as shown in Fig. 1, isolated nodes are inevitable even with uniform initialization. Isolated nodes may not be associated during the knn search, and their corresponding node features will be set to zero, i.e. the node features are invalid. Nevertheless, our SO-Net is robust to small amount of invalid nodes as demonstrated in the experiments. We propose a simple algorithm based on potential field methods to generate the initialization as shown in Algorithm 1. S = {s j 2 R 3,j =,,M 1} represents the SOM nodes and is the learning rate. The key idea is to apply a repulsion force between any pair of nodes, and external forces to attract nodes toward the origin. The parameter is used to control the weighting between the re-
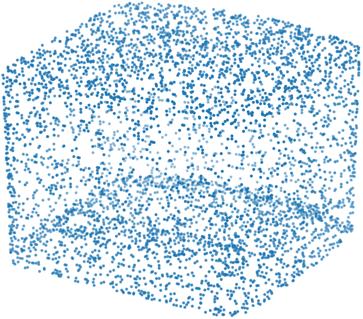
2 Method Tatsuma Wang CCMLT Li ViewAggregation Bai GIFT [3] Su MVCNN [33] Kd-Net [18] O-CNN [36] Ours Micro map Macro map Table 3. 3D shape retrieval results with SHREC16. Our SO-Net out-performs state-of-the-art deep networks with most metrics. 1 1 Bai_GIFT Li_ViewAggregation Su_MVCNN Tatsuma_DB-FMCD-FUL-LCDR Wang_CCMLT SO-Net.95.9 Bai_GIFT Li_ViewAggregation Su_MVCNN Tatsuma_DB-FMCD-FUL-LCDR Wang_CCMLT SO-Net P P R R (a) (b) Figure 9. Precision-recall curve for micro (a) and macro (b) metrics in the 3D shape retrieval task. In both curves, the SO-Net demonstrates the largest AUC. PointNet [26] PointNet++ [28] Kd-Net [18] Ours Size / MB Forward / ms Train / h Table 4. Time and space complexity of point cloud based networks in ModelNet4 classification. Figure 1. Results of SOM training with uniform initialization. Isolated nodes are inevitable even with uniform initialization. pulsion and attraction force, so that the resulting nodes are within the unit ball. Algorithm 1 Potential field method for SOM initialization Set random seed. Random initialization: S U( 1, 1) repeat for all sj 2 S do fjwall sj fjnode for all sk 2 S, k 6= j do s s fjnode fjnode + ksjj skkk2 2 for all sj 2 S do sj sj + (fjwall + fjnode ) until converge D.2. Batch Update Training Instead of updating the SOM once per point, the batch update rule conducts one update after accumulating the effect of all points in the point cloud. As a result, each SOM
3 update iteration is unrelated to the order of point, i.e., permutation invariant. During SOM training, each training sample affects the winner node and all its neighbors. We define the neighborhood function as a Gaussian distribution as follows: w xy (x, y p, q, x, y) = exp 1 2 (x µ)t 1 (x µ) p (2 )2 µ = p q T " # 2x =. 2 y The pseudo code of the training scheme is shown in Algorithm 2. P = {p i 2 R 3,i =,,N 1} and S = {s j 2 R 3,j =,,M 1} represent the input points and SOM nodes respectively. The learning rate t and neighborhood parameter ( x, y) should be decreased slowly during training. In addition, Algorithm 2 can be easily implemented as matrix operations which are highly efficient on GPU. Algorithm 2 SOM batch update rule Initialize m m SOM S with Algorithm 1 for t<maxiter do. Set update vectors to zero for all s xy 2 S do D xy. Accumulate the effect of all points for all p i 2 P do Obtain nearest neighbor coordinate p, q for all s xy 2 S do w xy Eq. (6) D xy D xy + w xy (p i s xy ). Conduct one update for all s xy 2 S do s xy s xy + t D xy t t +1 Adjust x, y and t E. More Experiments E.1. MNIST Classification We evaluate our network using the 2D MNIST dataset, which contains 6, images for training and (6) 1, images for testing. 2D coordinates are extracted from the non-zero pixels of the images. In order to upsample these 2D coordinates into point clouds of a certain size, e.g., 512 in our experiment, we augment the original pixel coordinates with Gaussian noise N (,.1). Other than the acquisition of point clouds, the data augmentation is exactly the same as other experiments using ModelNet or ShapeNetPart. We reduce the SOM size to 4 4 and set k = 4 because the point clouds are in 2D and the cloud size is relatively small. The neurons in the shared fully connected layers are reduced as well: during point feature extraction and (128+2) during node feature extraction. Similar to 3D classification tasks, our network outperforms existing point cloud based deep networks although the best performance is still from the well engineered 2D ConvNets as shown in Table 6. Despite using point cloud representation instead of images, our network demonstrates better results compared with ConvNets such as Network in Network [22], LeNet5 [2]. E.2. Classification with SOM Only There are two sources of information utilized by the SO- Net - the point cloud and trained SOM. The information from SOM is explicitly used when the nodes are concatenated with the node features at the beginning of node feature extraction. Additionally, the SOM is implicitly utilized because point normalization, knn search and the max pooling are based on the nodes. We perform classification using the SOM nodes without the point coordinates of the point cloud to analyze the contribution of the SOM. We feed the SOM nodes into a 3-layer MLP with MNIST, ModelNet1 and ModelNet4 dataset. Similarly in the Kd-Net [18], experiments are conducted using the kd-tree split directions without point information, i.e. feeding directions of the splits into a MLP. The results are shown in Table 5. It is interesting that we can achieve reasonable performance in the classification tasks by combining SOM and a simple MLP. But there is still a large gap between this variant and the full SO-Net, which suggests that the integration of SOM and point clouds is important. Another intriguing phenomenon is that the SOM based MLP achieves better results than split-based MLP. It suggests that maybe SOM is more expressive than kd-trees in the context of classification. E.3. Result Visualization To visualize the shape retrieval results, we present the top 5 retrieval results for a few shapes as shown in Fig. 11 For the point cloud autoencoder, we present results from two networks. The first network consumes 124 points and reconstructs 128 points with the ShapeNetPart dataset (Fig. 12), while the second one consumes 5 points
4 Method Input MNIST ModelNet1 ModelNet4 Kd-Net split based MLP [18] splits Kd-Net depth 1 [18] point Ours - SOM based MLP SOM nodes Ours point Table 5. Classification results using structure information - SOM nodes and kd-tree split directions. Method Error rate (%) Multi-column DNN [1].23 Network in Network [22].47 LeNet5 [2].8 Multi-layer perceptron [31] 1.6 PointNet [26].78 PointNet++ [28].51 Kd-Net [18].9 ECC [32].63 Ours.44 Table 6. MNIST classification results. and reconstructs 468 points using the ModelNet4 dataset (Fig. 13). We present one instance for each category. For results of object part segmentation using ShapeNet- Part dataset, we visualize one instance per category in Fig. 14. The inputs to the network are point clouds of size 124 and the corresponding surface normal vectors.







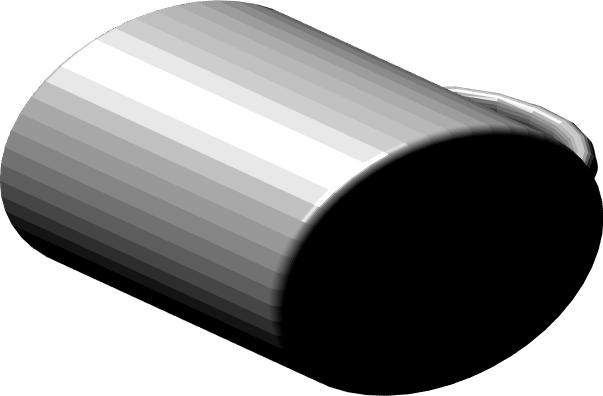
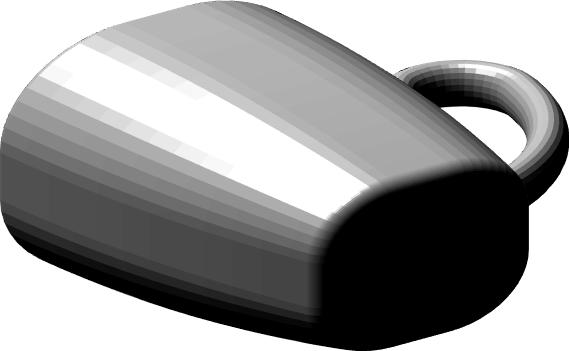
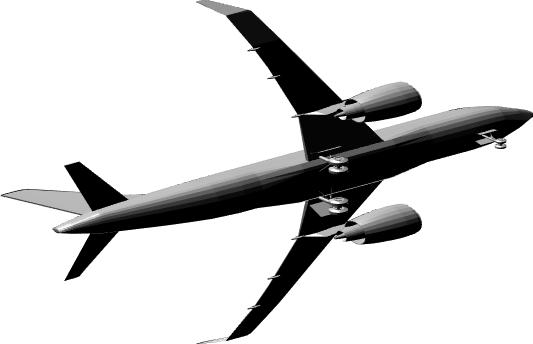

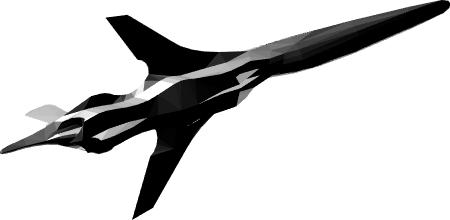





5 Figure 11. Top 5 retrieval results. First column: query shapes. Column 2-6: retrieved shapes ordered by feature similarity.

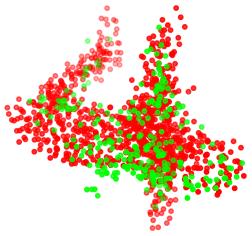
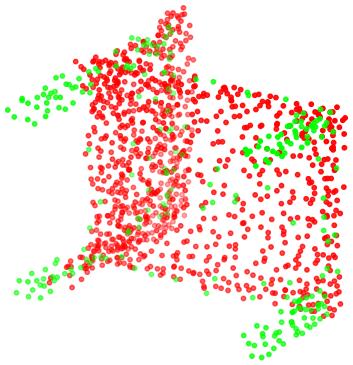
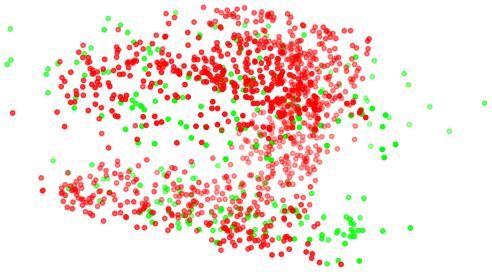

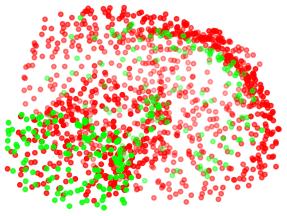
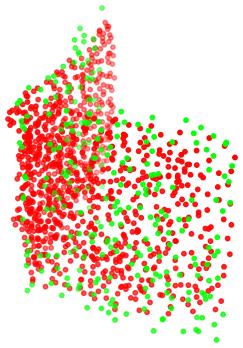
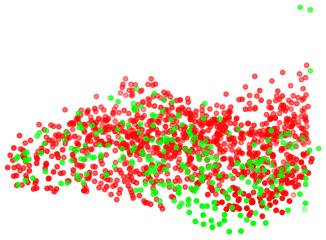
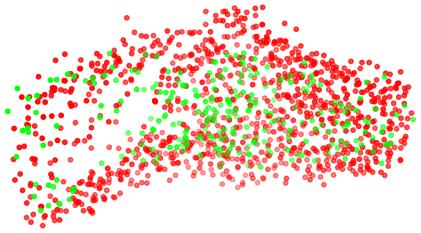
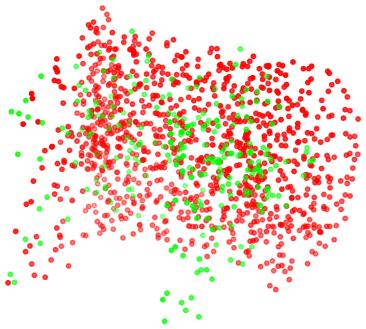
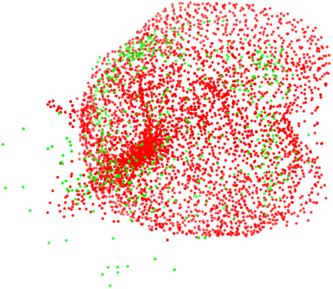
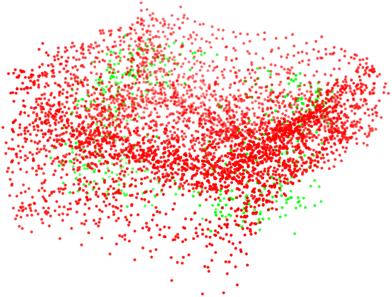
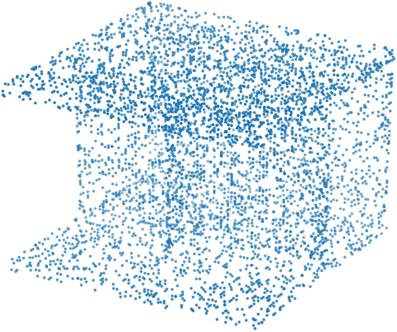
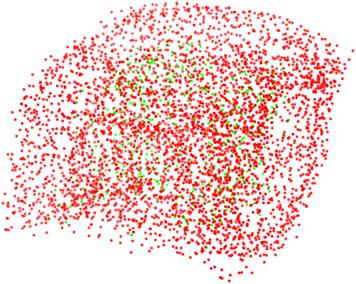
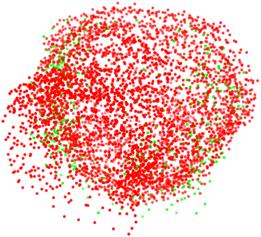
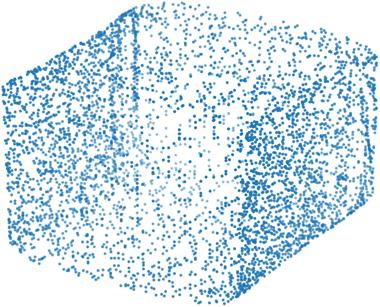
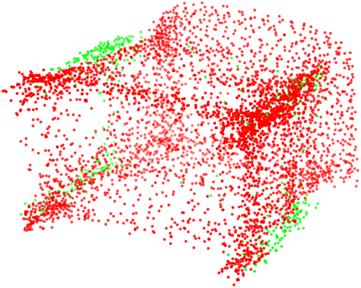
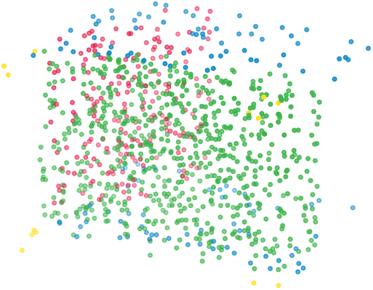
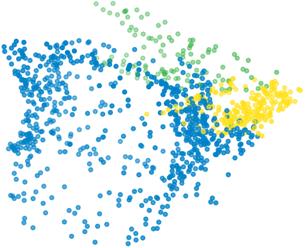
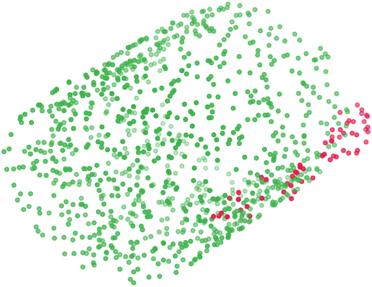
6 Figure 12. Results of our ShapeNetPart autoencoder. Red points are recovered by the convolution branch and green ones are by the fully connected branch. Odd rows: input point clouds. Even rows: reconstructed point clouds.


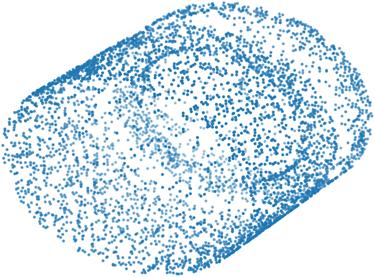
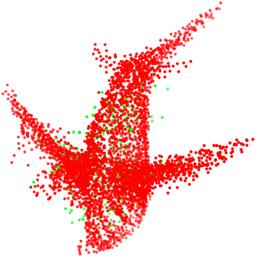
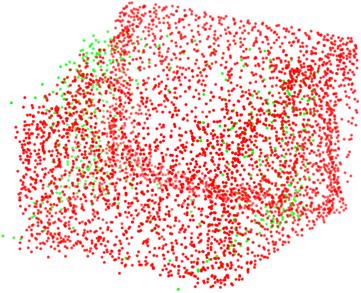
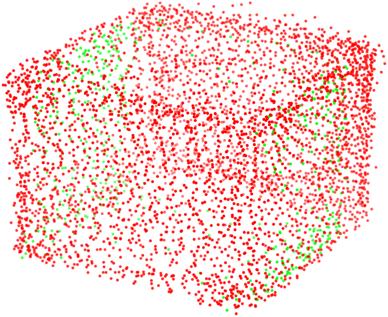
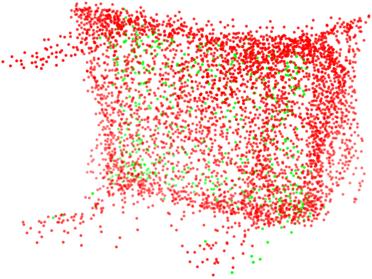
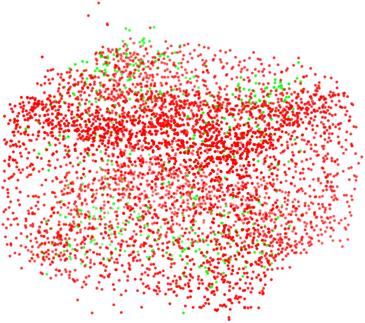
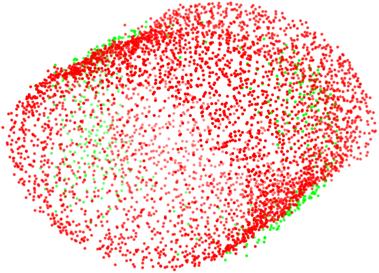

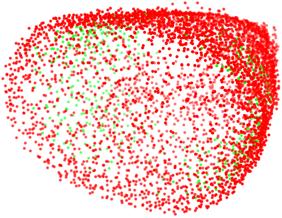
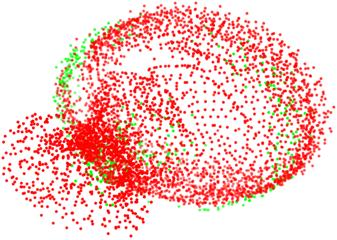
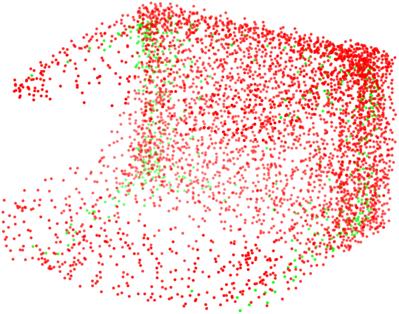

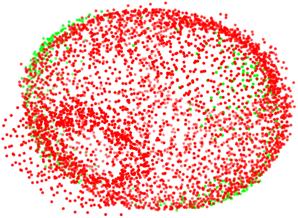
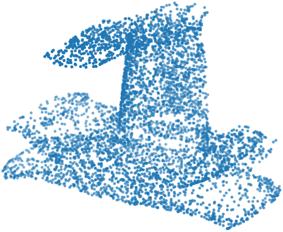
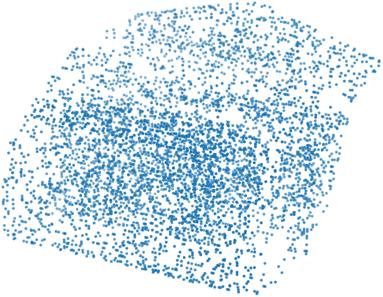
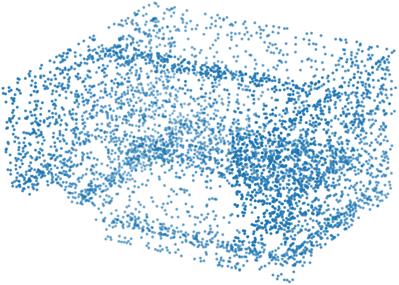
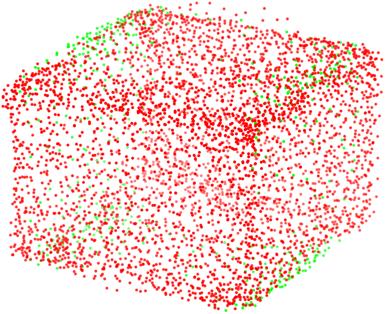
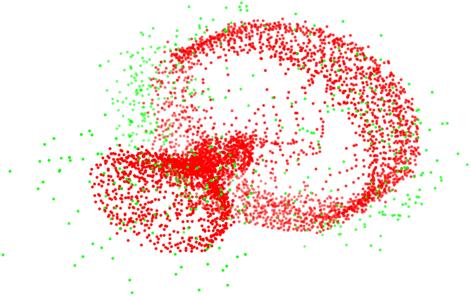
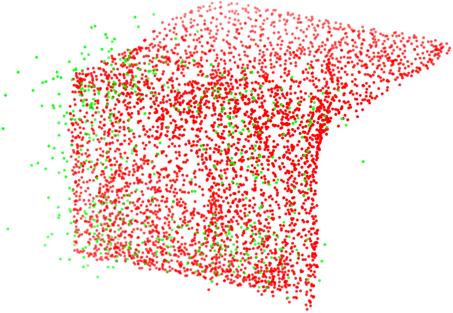
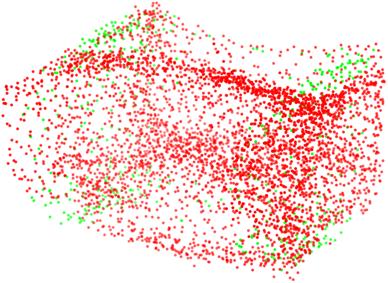
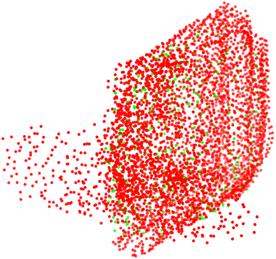
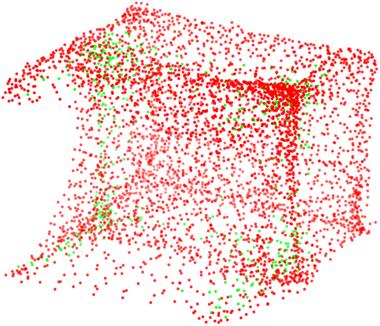

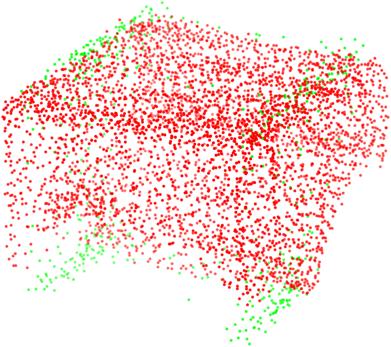

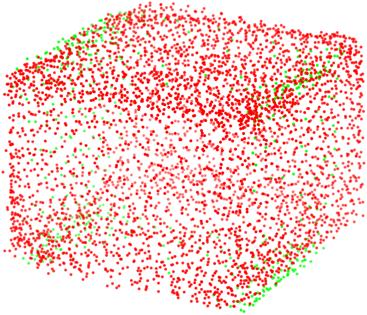
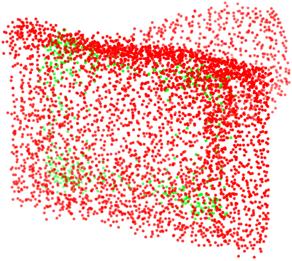
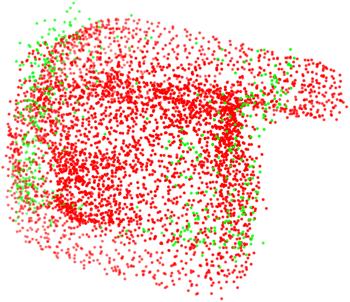
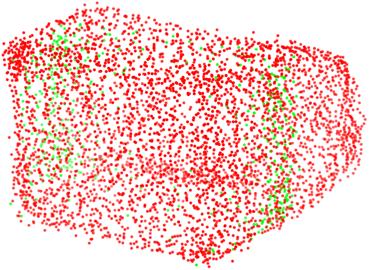


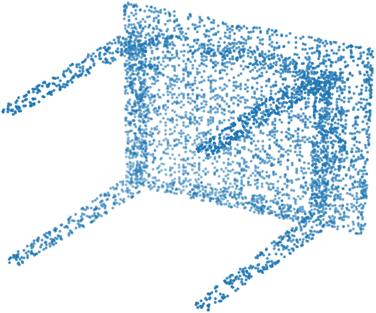
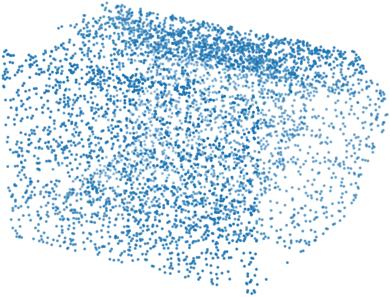
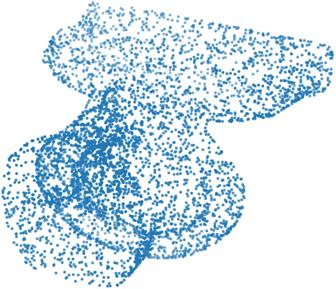
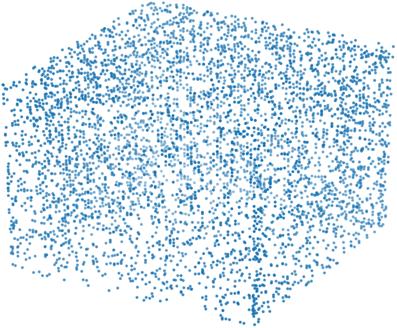
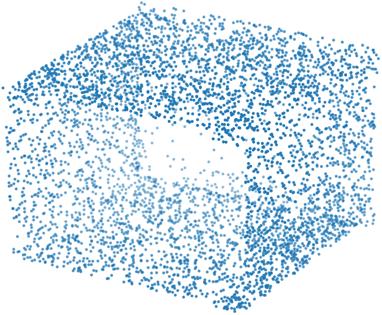
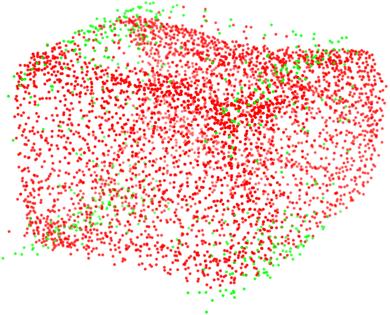
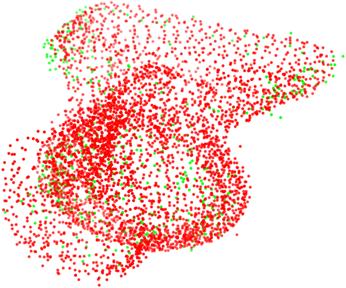
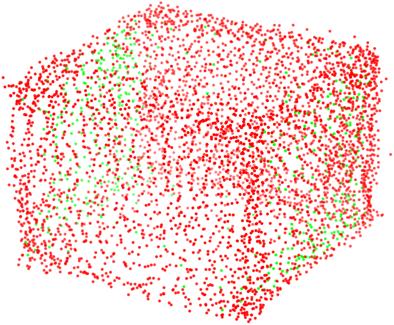
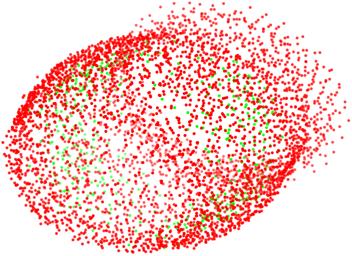
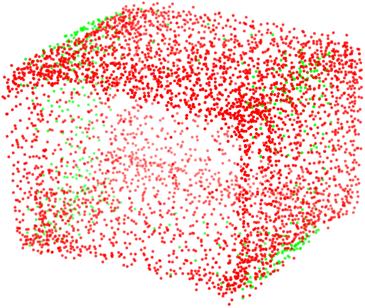
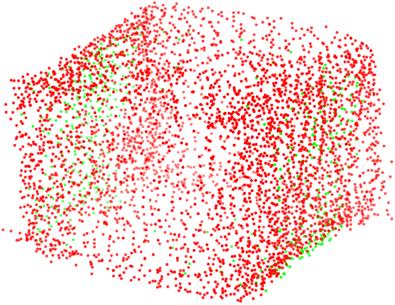
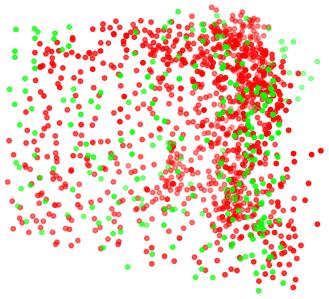
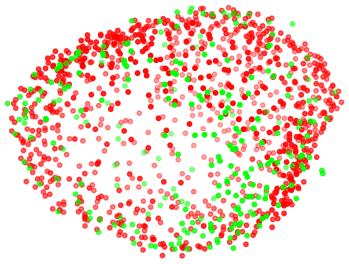
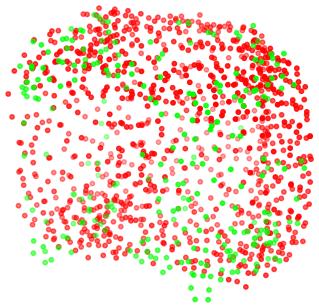
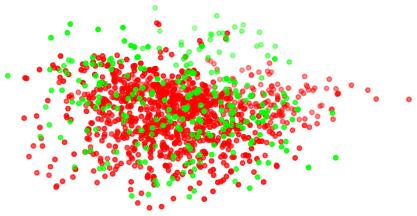
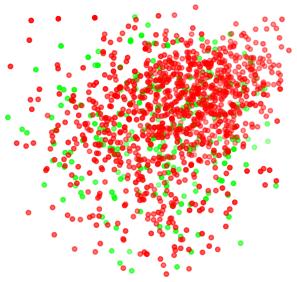
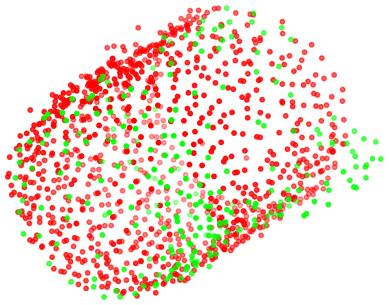
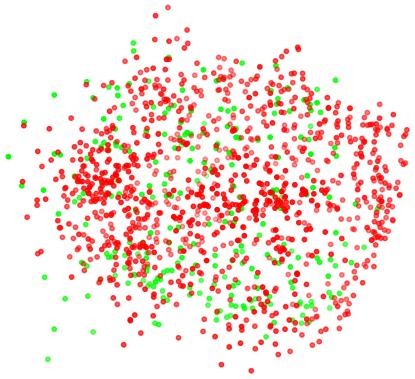
7 Figure 13. Results of our ModelNet4 autoencoder. Red points are recovered by the convolution branch and green ones are by the fully connected branch. Odd rows: input point clouds. Even rows: reconstructed point clouds.



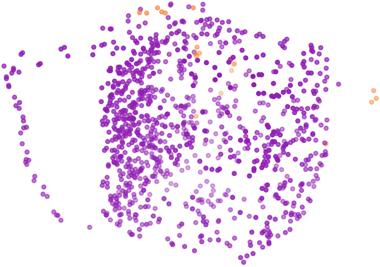
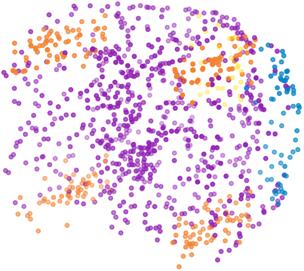
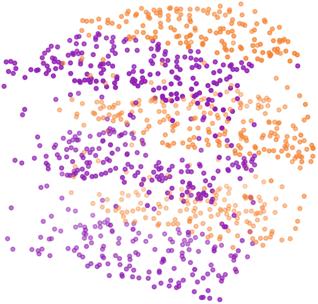
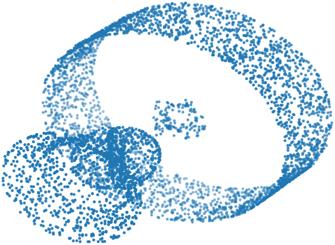
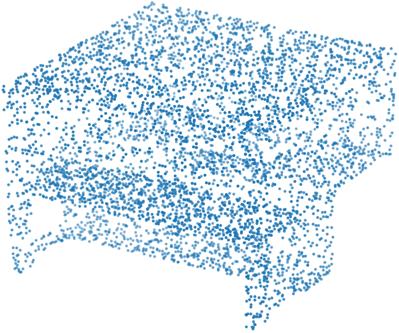
8 Figure 14. Results of object part segmentation. Odd rows: ground truth segmentation. Even rows: predicted segmentation.
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
 PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
arxiv: v4 [cs.cv] 27 Mar 2018
![arxiv: v4 [cs.cv] 27 Mar 2018](/thumbs/96/128983416.jpg "arxiv: v4 [cs.cv] 27 Mar 2018") SO-Net: Self-Organizing Network for Point Cloud Analysis Jiaxin Li Ben M. Chen Gim Hee Lee National University of Singapore arxiv:1803.04249v4 [cs.cv] 27 Mar 2018 Abstract This paper presents SO-Net, a
SO-Net: Self-Organizing Network for Point Cloud Analysis Jiaxin Li Ben M. Chen Gim Hee Lee National University of Singapore arxiv:1803.04249v4 [cs.cv] 27 Mar 2018 Abstract This paper presents SO-Net, a
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas
 PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
POINT CLOUD DEEP LEARNING
 POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
3D Deep Learning on Geometric Forms. Hao Su
 3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
arxiv: v1 [cs.cv] 28 Nov 2018
![arxiv: v1 [cs.cv] 28 Nov 2018](/thumbs/91/104803963.jpg "arxiv: v1 [cs.cv] 28 Nov 2018") MeshNet: Mesh Neural Network for 3D Shape Representation Yutong Feng, 1 Yifan Feng, 2 Haoxuan You, 1 Xibin Zhao 1, Yue Gao 1 1 BNRist, KLISS, School of Software, Tsinghua University, China. 2 School of
MeshNet: Mesh Neural Network for 3D Shape Representation Yutong Feng, 1 Yifan Feng, 2 Haoxuan You, 1 Xibin Zhao 1, Yue Gao 1 1 BNRist, KLISS, School of Software, Tsinghua University, China. 2 School of
CS468: 3D Deep Learning on Point Cloud Data. class label part label. Hao Su. image. May 10, 2017
 CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601
 with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601") Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
SO-Net: Self-Organizing Network for Point Cloud Analysis
 SO-Net: Self-Organizing Network for Point Cloud Analysis Jiaxin Li Ben M. Chen Gim Hee Lee National University of Singapore Abstract This paper presents SO-Net, a permutation invariant architecture for
SO-Net: Self-Organizing Network for Point Cloud Analysis Jiaxin Li Ben M. Chen Gim Hee Lee National University of Singapore Abstract This paper presents SO-Net, a permutation invariant architecture for
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material
 Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
PHOG:Photometric and geometric functions for textured shape retrieval. Presentation by Eivind Kvissel
 PHOG:Photometric and geometric functions for textured shape retrieval Presentation by Eivind Kvissel Introduction This paper is about tackling the issue of textured 3D object retrieval. Thanks to advances
PHOG:Photometric and geometric functions for textured shape retrieval Presentation by Eivind Kvissel Introduction This paper is about tackling the issue of textured 3D object retrieval. Thanks to advances
Machine Learning 13. week
 Machine Learning 13. week Deep Learning Convolutional Neural Network Recurrent Neural Network 1 Why Deep Learning is so Popular? 1. Increase in the amount of data Thanks to the Internet, huge amount of
Machine Learning 13. week Deep Learning Convolutional Neural Network Recurrent Neural Network 1 Why Deep Learning is so Popular? 1. Increase in the amount of data Thanks to the Internet, huge amount of
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
Supplementary Material for Ensemble Diffusion for Retrieval
 Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Non-Profiled Deep Learning-Based Side-Channel Attacks
 Non-Profiled Deep Learning-Based Side-Channel Attacks Benjamin Timon UL Transaction Security, Singapore benjamin.timon@ul.com Abstract. Deep Learning has recently been introduced as a new alternative to
Non-Profiled Deep Learning-Based Side-Channel Attacks Benjamin Timon UL Transaction Security, Singapore benjamin.timon@ul.com Abstract. Deep Learning has recently been introduced as a new alternative to
Dynamic Routing Between Capsules
 Report Explainable Machine Learning Dynamic Routing Between Capsules Author: Michael Dorkenwald Supervisor: Dr. Ullrich Köthe 28. Juni 2018 Inhaltsverzeichnis 1 Introduction 2 2 Motivation 2 3 CapusleNet
Report Explainable Machine Learning Dynamic Routing Between Capsules Author: Michael Dorkenwald Supervisor: Dr. Ullrich Köthe 28. Juni 2018 Inhaltsverzeichnis 1 Introduction 2 2 Motivation 2 3 CapusleNet
Su et al. Shape Descriptors - III
 Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Structure-oriented Networks of Shape Collections
 Structure-oriented Networks of Shape Collections Noa Fish 1 Oliver van Kaick 2 Amit Bermano 3 Daniel Cohen-Or 1 1 Tel Aviv University 2 Carleton University 3 Princeton University 1 pplementary material
Structure-oriented Networks of Shape Collections Noa Fish 1 Oliver van Kaick 2 Amit Bermano 3 Daniel Cohen-Or 1 1 Tel Aviv University 2 Carleton University 3 Princeton University 1 pplementary material
The exam is closed book, closed notes except your one-page cheat sheet.
 CS 189 Fall 2015 Introduction to Machine Learning Final Please do not turn over the page before you are instructed to do so. You have 2 hours and 50 minutes. Please write your initials on the top-right
CS 189 Fall 2015 Introduction to Machine Learning Final Please do not turn over the page before you are instructed to do so. You have 2 hours and 50 minutes. Please write your initials on the top-right
Photo-realistic Renderings for Machines Seong-heum Kim
 Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
MoonRiver: Deep Neural Network in C++
 MoonRiver: Deep Neural Network in C++ Chung-Yi Weng Computer Science & Engineering University of Washington chungyi@cs.washington.edu Abstract Artificial intelligence resurges with its dramatic improvement
MoonRiver: Deep Neural Network in C++ Chung-Yi Weng Computer Science & Engineering University of Washington chungyi@cs.washington.edu Abstract Artificial intelligence resurges with its dramatic improvement
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR
 3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle Outline Introduction Preliminaries Approach Volumetric Density Mapping
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle Outline Introduction Preliminaries Approach Volumetric Density Mapping
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Deep Learning with Tensorflow AlexNet
 Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
Vulnerability of machine learning models to adversarial examples
 Vulnerability of machine learning models to adversarial examples Petra Vidnerová Institute of Computer Science The Czech Academy of Sciences Hora Informaticae 1 Outline Introduction Works on adversarial
Vulnerability of machine learning models to adversarial examples Petra Vidnerová Institute of Computer Science The Czech Academy of Sciences Hora Informaticae 1 Outline Introduction Works on adversarial
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models
 One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
Deep Face Recognition. Nathan Sun
 Deep Face Recognition Nathan Sun Why Facial Recognition? Picture ID or video tracking Higher Security for Facial Recognition Software Immensely useful to police in tracking suspects Your face will be an
Deep Face Recognition Nathan Sun Why Facial Recognition? Picture ID or video tracking Higher Security for Facial Recognition Software Immensely useful to police in tracking suspects Your face will be an
Machine Learning. Deep Learning. Eric Xing (and Pengtao Xie) , Fall Lecture 8, October 6, Eric CMU,
 , Fall Lecture 8, October 6, Eric CMU,") Machine Learning 10-701, Fall 2015 Deep Learning Eric Xing (and Pengtao Xie) Lecture 8, October 6, 2015 Eric Xing @ CMU, 2015 1 A perennial challenge in computer vision: feature engineering SIFT Spin image
Machine Learning 10-701, Fall 2015 Deep Learning Eric Xing (and Pengtao Xie) Lecture 8, October 6, 2015 Eric Xing @ CMU, 2015 1 A perennial challenge in computer vision: feature engineering SIFT Spin image
Learning to generate 3D shapes
 Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
SHREC 16 Track Large-Scale 3D Shape Retrieval from ShapeNet Core55
 Eurographics Workshop on 3D Object Retrieval (2016) J. Jorge and M. Lin (Guest Editors) SHREC 16 Track Large-Scale 3D Shape Retrieval from ShapeNet Core55 M. Savva 1, F. Yu 2, Hao Su 1, M. Aono 8, B. Chen
Eurographics Workshop on 3D Object Retrieval (2016) J. Jorge and M. Lin (Guest Editors) SHREC 16 Track Large-Scale 3D Shape Retrieval from ShapeNet Core55 M. Savva 1, F. Yu 2, Hao Su 1, M. Aono 8, B. Chen
arxiv: v1 [cs.cv] 2 Dec 2018
![arxiv: v1 [cs.cv] 2 Dec 2018](/thumbs/91/106472963.jpg "arxiv: v1 [cs.cv] 2 Dec 2018") PVRNet: Point-View Relation Neural Network for 3D Shape Recognition Haoxuan You 1, Yifan Feng 2, Xibin Zhao 1, hangqing Zou 3, Rongrong Ji 2, Yue Gao 1 1 BNRist, KLISS, School of Software, Tsinghua University,
PVRNet: Point-View Relation Neural Network for 3D Shape Recognition Haoxuan You 1, Yifan Feng 2, Xibin Zhao 1, hangqing Zou 3, Rongrong Ji 2, Yue Gao 1 1 BNRist, KLISS, School of Software, Tsinghua University,
Supplementary Material for The Generalized PatchMatch Correspondence Algorithm
 Supplementary Material for The Generalized PatchMatch Correspondence Algorithm Connelly Barnes 1, Eli Shechtman 2, Dan B Goldman 2, Adam Finkelstein 1 1 Princeton University, 2 Adobe Systems 1 Overview
Supplementary Material for The Generalized PatchMatch Correspondence Algorithm Connelly Barnes 1, Eli Shechtman 2, Dan B Goldman 2, Adam Finkelstein 1 1 Princeton University, 2 Adobe Systems 1 Overview
Emphasizing 3D Properties in Recurrent Multi-View Aggregation for 3D Shape Retrieval
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) Emphasizing 3D Properties in Recurrent Multi-View Aggregation for 3D Shape Retrieval Cheng Xu, Biao Leng, Cheng Zhang, Xiaochen Zhou
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) Emphasizing 3D Properties in Recurrent Multi-View Aggregation for 3D Shape Retrieval Cheng Xu, Biao Leng, Cheng Zhang, Xiaochen Zhou
3D Shape Segmentation with Projective Convolutional Networks
 3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
Hide-and-Seek: Forcing a network to be Meticulous for Weakly-supervised Object and Action Localization
 Hide-and-Seek: Forcing a network to be Meticulous for Weakly-supervised Object and Action Localization Krishna Kumar Singh and Yong Jae Lee University of California, Davis ---- Paper Presentation Yixian
Hide-and-Seek: Forcing a network to be Meticulous for Weakly-supervised Object and Action Localization Krishna Kumar Singh and Yong Jae Lee University of California, Davis ---- Paper Presentation Yixian
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
Deep Learning With Noise
 Deep Learning With Noise Yixin Luo Computer Science Department Carnegie Mellon University yixinluo@cs.cmu.edu Fan Yang Department of Mathematical Sciences Carnegie Mellon University fanyang1@andrew.cmu.edu
Deep Learning With Noise Yixin Luo Computer Science Department Carnegie Mellon University yixinluo@cs.cmu.edu Fan Yang Department of Mathematical Sciences Carnegie Mellon University fanyang1@andrew.cmu.edu
Mask R-CNN. By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi
 Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Neural Network and Deep Learning. Donglin Zeng, Department of Biostatistics, University of North Carolina
 Neural Network and Deep Learning Early history of deep learning Deep learning dates back to 1940s: known as cybernetics in the 1940s-60s, connectionism in the 1980s-90s, and under the current name starting
Neural Network and Deep Learning Early history of deep learning Deep learning dates back to 1940s: known as cybernetics in the 1940s-60s, connectionism in the 1980s-90s, and under the current name starting
Point2Sequence: Learning the Shape Representation of 3D Point Clouds with an Attention-based Sequence to Sequence Network
 Point2Sequence: Learning the Shape Representation of 3D Point Clouds with an Attention-based Sequence to Sequence Network Xinhai Liu, Zhizhong Han,2, Yu-Shen Liu, Matthias Zwicker 2 School of Software,
Point2Sequence: Learning the Shape Representation of 3D Point Clouds with an Attention-based Sequence to Sequence Network Xinhai Liu, Zhizhong Han,2, Yu-Shen Liu, Matthias Zwicker 2 School of Software,
CS 340 Lec. 4: K-Nearest Neighbors
 CS 340 Lec. 4: K-Nearest Neighbors AD January 2011 AD () CS 340 Lec. 4: K-Nearest Neighbors January 2011 1 / 23 K-Nearest Neighbors Introduction Choice of Metric Overfitting and Underfitting Selection
CS 340 Lec. 4: K-Nearest Neighbors AD January 2011 AD () CS 340 Lec. 4: K-Nearest Neighbors January 2011 1 / 23 K-Nearest Neighbors Introduction Choice of Metric Overfitting and Underfitting Selection
Keras: Handwritten Digit Recognition using MNIST Dataset
 Keras: Handwritten Digit Recognition using MNIST Dataset IIT PATNA February 9, 2017 1 / 24 OUTLINE 1 Introduction Keras: Deep Learning library for Theano and TensorFlow 2 Installing Keras Installation
Keras: Handwritten Digit Recognition using MNIST Dataset IIT PATNA February 9, 2017 1 / 24 OUTLINE 1 Introduction Keras: Deep Learning library for Theano and TensorFlow 2 Installing Keras Installation
3D Deep Learning
 3D Deep Learning Tutorial@CVPR2017 Hao Su (UCSD) Leonidas Guibas (Stanford) Michael Bronstein (Università della Svizzera Italiana) Evangelos Kalogerakis (UMass) Jimei Yang (Adobe Research) Charles Qi (Stanford)
3D Deep Learning Tutorial@CVPR2017 Hao Su (UCSD) Leonidas Guibas (Stanford) Michael Bronstein (Università della Svizzera Italiana) Evangelos Kalogerakis (UMass) Jimei Yang (Adobe Research) Charles Qi (Stanford)
arxiv: v1 [cs.cv] 21 Nov 2018
![arxiv: v1 [cs.cv] 21 Nov 2018](/thumbs/90/103871586.jpg "arxiv: v1 [cs.cv] 21 Nov 2018") Angular riplet-center Loss for Multi-view 3D Shape Retrieval Zhaoqun Li 1, Cheng Xu 1, Biao Leng 1,2,3 1 School of Computer Science and Engineering, Beihang University, Beijing, 100191 2 Research Institute
Angular riplet-center Loss for Multi-view 3D Shape Retrieval Zhaoqun Li 1, Cheng Xu 1, Biao Leng 1,2,3 1 School of Computer Science and Engineering, Beihang University, Beijing, 100191 2 Research Institute
Introduction to Neural Networks
 Introduction to Neural Networks Jakob Verbeek 2017-2018 Biological motivation Neuron is basic computational unit of the brain about 10^11 neurons in human brain Simplified neuron model as linear threshold
Introduction to Neural Networks Jakob Verbeek 2017-2018 Biological motivation Neuron is basic computational unit of the brain about 10^11 neurons in human brain Simplified neuron model as linear threshold
NVIDIA FOR DEEP LEARNING. Bill Veenhuis
 NVIDIA FOR DEEP LEARNING Bill Veenhuis bveenhuis@nvidia.com Nvidia is the world s leading ai platform ONE ARCHITECTURE CUDA 2 GPU: Perfect Companion for Accelerating Apps & A.I. CPU GPU 3 Intro to AI AGENDA
NVIDIA FOR DEEP LEARNING Bill Veenhuis bveenhuis@nvidia.com Nvidia is the world s leading ai platform ONE ARCHITECTURE CUDA 2 GPU: Perfect Companion for Accelerating Apps & A.I. CPU GPU 3 Intro to AI AGENDA
3D Object Classification via Spherical Projections
 3D Object Classification via Spherical Projections Zhangjie Cao 1,QixingHuang 2,andRamaniKarthik 3 1 School of Software Tsinghua University, China 2 Department of Computer Science University of Texas at
3D Object Classification via Spherical Projections Zhangjie Cao 1,QixingHuang 2,andRamaniKarthik 3 1 School of Software Tsinghua University, China 2 Department of Computer Science University of Texas at
Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels
 Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIENCE, VOL.32, NO.9, SEPTEMBER 2010 Hae Jong Seo, Student Member,
Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIENCE, VOL.32, NO.9, SEPTEMBER 2010 Hae Jong Seo, Student Member,
Know your data - many types of networks
 Architectures Know your data - many types of networks Fixed length representation Variable length representation Online video sequences, or samples of different sizes Images Specific architectures for
Architectures Know your data - many types of networks Fixed length representation Variable length representation Online video sequences, or samples of different sizes Images Specific architectures for
Deep Learning for Computer Vision II
 IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
CS 6501: Deep Learning for Computer Graphics. Training Neural Networks II. Connelly Barnes
 CS 6501: Deep Learning for Computer Graphics Training Neural Networks II Connelly Barnes Overview Preprocessing Initialization Vanishing/exploding gradients problem Batch normalization Dropout Additional
CS 6501: Deep Learning for Computer Graphics Training Neural Networks II Connelly Barnes Overview Preprocessing Initialization Vanishing/exploding gradients problem Batch normalization Dropout Additional
LSTM and its variants for visual recognition. Xiaodan Liang Sun Yat-sen University
 LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
Apparel Classifier and Recommender using Deep Learning
 Apparel Classifier and Recommender using Deep Learning Live Demo at: http://saurabhg.me/projects/tag-that-apparel Saurabh Gupta sag043@ucsd.edu Siddhartha Agarwal siagarwa@ucsd.edu Apoorve Dave a1dave@ucsd.edu
Apparel Classifier and Recommender using Deep Learning Live Demo at: http://saurabhg.me/projects/tag-that-apparel Saurabh Gupta sag043@ucsd.edu Siddhartha Agarwal siagarwa@ucsd.edu Apoorve Dave a1dave@ucsd.edu
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Intro to Deep Learning. Slides Credit: Andrej Karapathy, Derek Hoiem, Marc Aurelio, Yann LeCunn
 Intro to Deep Learning Slides Credit: Andrej Karapathy, Derek Hoiem, Marc Aurelio, Yann LeCunn Why this class? Deep Features Have been able to harness the big data in the most efficient and effective
Intro to Deep Learning Slides Credit: Andrej Karapathy, Derek Hoiem, Marc Aurelio, Yann LeCunn Why this class? Deep Features Have been able to harness the big data in the most efficient and effective
Sparse 3D Convolutional Neural Networks for Large-Scale Shape Retrieval
 Sparse 3D Convolutional Neural Networks for Large-Scale Shape Retrieval Alexandr Notchenko, Ermek Kapushev, Evgeny Burnaev {avnotchenko,kapushev,burnaevevgeny}@gmail.com Skolkovo Institute of Science and
Sparse 3D Convolutional Neural Networks for Large-Scale Shape Retrieval Alexandr Notchenko, Ermek Kapushev, Evgeny Burnaev {avnotchenko,kapushev,burnaevevgeny}@gmail.com Skolkovo Institute of Science and
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015
 CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
Deep Aggregation of Local 3D Geometric Features for 3D Model Retrieval
 FURUYA AND OHBUCHI: DEEP AGGREGATION OF LOCAL 3D FEATURES 1 Deep Aggregation of Local 3D Geometric Features for 3D Model Retrieval Takahiko Furuya 1 takahikof AT yamanashi.ac.jp Ryutarou Ohbuchi 1 ohbuchi
FURUYA AND OHBUCHI: DEEP AGGREGATION OF LOCAL 3D FEATURES 1 Deep Aggregation of Local 3D Geometric Features for 3D Model Retrieval Takahiko Furuya 1 takahikof AT yamanashi.ac.jp Ryutarou Ohbuchi 1 ohbuchi
Why Normalizing v? Why did we normalize v on the right side? Because we want the length of the left side to be the eigenvalue
 Why Normalizing v? Why did we normalize v on the right side? Because we want the length of the left side to be the eigenvalue 1 CCI PCA Algorithm (1) 2 CCI PCA Algorithm (2) 3 PCA from the FERET Face Image
Why Normalizing v? Why did we normalize v on the right side? Because we want the length of the left side to be the eigenvalue 1 CCI PCA Algorithm (1) 2 CCI PCA Algorithm (2) 3 PCA from the FERET Face Image
4422 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 27, NO. 9, SEPTEMBER 2018
 4422 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 27, NO. 9, SEPTEMBER 2018 Robust 3D Hand Pose Estimation From Single Depth Images Using Multi-View CNNs Liuhao Ge, Hui Liang, Member, IEEE, Junsong Yuan,
4422 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 27, NO. 9, SEPTEMBER 2018 Robust 3D Hand Pose Estimation From Single Depth Images Using Multi-View CNNs Liuhao Ge, Hui Liang, Member, IEEE, Junsong Yuan,
Neural Network-Hardware Co-design for Scalable RRAM-based BNN Accelerators
 Neural Network-Hardware Co-design for Scalable RRAM-based BNN Accelerators Yulhwa Kim, Hyungjun Kim, and Jae-Joon Kim Dept. of Creative IT Engineering, Pohang University of Science and Technology (POSTECH),
Neural Network-Hardware Co-design for Scalable RRAM-based BNN Accelerators Yulhwa Kim, Hyungjun Kim, and Jae-Joon Kim Dept. of Creative IT Engineering, Pohang University of Science and Technology (POSTECH),
PSU Student Research Symposium 2017 Bayesian Optimization for Refining Object Proposals, with an Application to Pedestrian Detection Anthony D.
 PSU Student Research Symposium 2017 Bayesian Optimization for Refining Object Proposals, with an Application to Pedestrian Detection Anthony D. Rhodes 5/10/17 What is Machine Learning? Machine learning
PSU Student Research Symposium 2017 Bayesian Optimization for Refining Object Proposals, with an Application to Pedestrian Detection Anthony D. Rhodes 5/10/17 What is Machine Learning? Machine learning
Tutorial on Machine Learning Tools
 Tutorial on Machine Learning Tools Yanbing Xue Milos Hauskrecht Why do we need these tools? Widely deployed classical models No need to code from scratch Easy-to-use GUI Outline Matlab Apps Weka 3 UI TensorFlow
Tutorial on Machine Learning Tools Yanbing Xue Milos Hauskrecht Why do we need these tools? Widely deployed classical models No need to code from scratch Easy-to-use GUI Outline Matlab Apps Weka 3 UI TensorFlow
A Deep Learning Approach to Vehicle Speed Estimation
 A Deep Learning Approach to Vehicle Speed Estimation Benjamin Penchas bpenchas@stanford.edu Tobin Bell tbell@stanford.edu Marco Monteiro marcorm@stanford.edu ABSTRACT Given car dashboard video footage,
A Deep Learning Approach to Vehicle Speed Estimation Benjamin Penchas bpenchas@stanford.edu Tobin Bell tbell@stanford.edu Marco Monteiro marcorm@stanford.edu ABSTRACT Given car dashboard video footage,
Neural Network Optimization and Tuning / Spring 2018 / Recitation 3
 Neural Network Optimization and Tuning 11-785 / Spring 2018 / Recitation 3 1 Logistics You will work through a Jupyter notebook that contains sample and starter code with explanations and comments throughout.
Neural Network Optimization and Tuning 11-785 / Spring 2018 / Recitation 3 1 Logistics You will work through a Jupyter notebook that contains sample and starter code with explanations and comments throughout.
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
3D Object Recognition using Multiclass SVM-KNN
 3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
Accelerating Convolutional Neural Nets. Yunming Zhang
 Accelerating Convolutional Neural Nets Yunming Zhang Focus Convolutional Neural Nets is the state of the art in classifying the images The models take days to train Difficult for the programmers to tune
Accelerating Convolutional Neural Nets Yunming Zhang Focus Convolutional Neural Nets is the state of the art in classifying the images The models take days to train Difficult for the programmers to tune
Self-Organizing Maps for cyclic and unbounded graphs
 Self-Organizing Maps for cyclic and unbounded graphs M. Hagenbuchner 1, A. Sperduti 2, A.C. Tsoi 3 1- University of Wollongong, Wollongong, Australia. 2- University of Padova, Padova, Italy. 3- Hong Kong
Self-Organizing Maps for cyclic and unbounded graphs M. Hagenbuchner 1, A. Sperduti 2, A.C. Tsoi 3 1- University of Wollongong, Wollongong, Australia. 2- University of Padova, Padova, Italy. 3- Hong Kong
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Face Recognition A Deep Learning Approach
 Face Recognition A Deep Learning Approach Lihi Shiloh Tal Perl Deep Learning Seminar 2 Outline What about Cat recognition? Classical face recognition Modern face recognition DeepFace FaceNet Comparison
Face Recognition A Deep Learning Approach Lihi Shiloh Tal Perl Deep Learning Seminar 2 Outline What about Cat recognition? Classical face recognition Modern face recognition DeepFace FaceNet Comparison
COMP 551 Applied Machine Learning Lecture 16: Deep Learning
 COMP 551 Applied Machine Learning Lecture 16: Deep Learning Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: Class web page: www.cs.mcgill.ca/~hvanho2/comp551 Unless otherwise noted, all
COMP 551 Applied Machine Learning Lecture 16: Deep Learning Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: Class web page: www.cs.mcgill.ca/~hvanho2/comp551 Unless otherwise noted, all
Multimodal Medical Image Retrieval based on Latent Topic Modeling
 Multimodal Medical Image Retrieval based on Latent Topic Modeling Mandikal Vikram 15it217.vikram@nitk.edu.in Suhas BS 15it110.suhas@nitk.edu.in Aditya Anantharaman 15it201.aditya.a@nitk.edu.in Sowmya Kamath
Multimodal Medical Image Retrieval based on Latent Topic Modeling Mandikal Vikram 15it217.vikram@nitk.edu.in Suhas BS 15it110.suhas@nitk.edu.in Aditya Anantharaman 15it201.aditya.a@nitk.edu.in Sowmya Kamath
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Deep Learning For Video Classification. Presented by Natalie Carlebach & Gil Sharon
 Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Where s Waldo? A Deep Learning approach to Template Matching
 Where s Waldo? A Deep Learning approach to Template Matching Thomas Hossler Department of Geological Sciences Stanford University thossler@stanford.edu Abstract We propose a new approach to Template Matching
Where s Waldo? A Deep Learning approach to Template Matching Thomas Hossler Department of Geological Sciences Stanford University thossler@stanford.edu Abstract We propose a new approach to Template Matching
Artificial Intelligence. Programming Styles
 Artificial Intelligence Intro to Machine Learning Programming Styles Standard CS: Explicitly program computer to do something Early AI: Derive a problem description (state) and use general algorithms to
Artificial Intelligence Intro to Machine Learning Programming Styles Standard CS: Explicitly program computer to do something Early AI: Derive a problem description (state) and use general algorithms to
RECENT years have witnessed the rapid growth of image. SSDH: Semi-supervised Deep Hashing for Large Scale Image Retrieval
 SSDH: Semi-supervised Deep Hashing for Large Scale Image Retrieval Jian Zhang, Yuxin Peng, and Junchao Zhang arxiv:607.08477v [cs.cv] 28 Jul 206 Abstract The hashing methods have been widely used for efficient
SSDH: Semi-supervised Deep Hashing for Large Scale Image Retrieval Jian Zhang, Yuxin Peng, and Junchao Zhang arxiv:607.08477v [cs.cv] 28 Jul 206 Abstract The hashing methods have been widely used for efficient
Supplementary Materials for Learning to Parse Wireframes in Images of Man-Made Environments
 Supplementary Materials for Learning to Parse Wireframes in Images of Man-Made Environments Kun Huang, Yifan Wang, Zihan Zhou 2, Tianjiao Ding, Shenghua Gao, and Yi Ma 3 ShanghaiTech University {huangkun,
Supplementary Materials for Learning to Parse Wireframes in Images of Man-Made Environments Kun Huang, Yifan Wang, Zihan Zhou 2, Tianjiao Ding, Shenghua Gao, and Yi Ma 3 ShanghaiTech University {huangkun,
Binary Convolutional Neural Network on RRAM
 Binary Convolutional Neural Network on RRAM Tianqi Tang, Lixue Xia, Boxun Li, Yu Wang, Huazhong Yang Dept. of E.E, Tsinghua National Laboratory for Information Science and Technology (TNList) Tsinghua
Binary Convolutional Neural Network on RRAM Tianqi Tang, Lixue Xia, Boxun Li, Yu Wang, Huazhong Yang Dept. of E.E, Tsinghua National Laboratory for Information Science and Technology (TNList) Tsinghua
Deep Learning Explained Module 4: Convolution Neural Networks (CNN or Conv Nets)
") Deep Learning Explained Module 4: Convolution Neural Networks (CNN or Conv Nets) Sayan D. Pathak, Ph.D., Principal ML Scientist, Microsoft Roland Fernandez, Senior Researcher, Microsoft Module Outline
Deep Learning Explained Module 4: Convolution Neural Networks (CNN or Conv Nets) Sayan D. Pathak, Ph.D., Principal ML Scientist, Microsoft Roland Fernandez, Senior Researcher, Microsoft Module Outline
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction
 Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Deep Character-Level Click-Through Rate Prediction for Sponsored Search
 Deep Character-Level Click-Through Rate Prediction for Sponsored Search Bora Edizel - Phd Student UPF Amin Mantrach - Criteo Research Xiao Bai - Oath This work was done at Yahoo and will be presented as
Deep Character-Level Click-Through Rate Prediction for Sponsored Search Bora Edizel - Phd Student UPF Amin Mantrach - Criteo Research Xiao Bai - Oath This work was done at Yahoo and will be presented as
Single Image Super Resolution of Textures via CNNs. Andrew Palmer
 Single Image Super Resolution of Textures via CNNs Andrew Palmer What is Super Resolution (SR)? Simple: Obtain one or more high-resolution images from one or more low-resolution ones Many, many applications
Single Image Super Resolution of Textures via CNNs Andrew Palmer What is Super Resolution (SR)? Simple: Obtain one or more high-resolution images from one or more low-resolution ones Many, many applications
Stacked Denoising Autoencoders for Face Pose Normalization
 Stacked Denoising Autoencoders for Face Pose Normalization Yoonseop Kang 1, Kang-Tae Lee 2,JihyunEun 2, Sung Eun Park 2 and Seungjin Choi 1 1 Department of Computer Science and Engineering Pohang University
Stacked Denoising Autoencoders for Face Pose Normalization Yoonseop Kang 1, Kang-Tae Lee 2,JihyunEun 2, Sung Eun Park 2 and Seungjin Choi 1 1 Department of Computer Science and Engineering Pohang University
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Supplementary Material for SphereNet: Learning Spherical Representations for Detection and Classification in Omnidirectional Images
 Supplementary Material for SphereNet: Learning Spherical Representations for Detection and Classification in Omnidirectional Images Benjamin Coors 1,3, Alexandru Paul Condurache 2,3, and Andreas Geiger
Supplementary Material for SphereNet: Learning Spherical Representations for Detection and Classification in Omnidirectional Images Benjamin Coors 1,3, Alexandru Paul Condurache 2,3, and Andreas Geiger
arxiv: v1 [cs.cv] 6 Nov 2018 Abstract
![arxiv: v1 [cs.cv] 6 Nov 2018 Abstract](/thumbs/89/101192741.jpg "arxiv: v1 [cs.cv] 6 Nov 2018 Abstract") 3DCapsule: Extending the Capsule Architecture to Classify 3D Point Clouds Ali Cheraghian Australian National University, Data61-CSIRO ali.cheraghian@anu.edu.au Lars Petersson Data61-CSIRO lars.petersson@data61.csiro.au
3DCapsule: Extending the Capsule Architecture to Classify 3D Point Clouds Ali Cheraghian Australian National University, Data61-CSIRO ali.cheraghian@anu.edu.au Lars Petersson Data61-CSIRO lars.petersson@data61.csiro.au
Learning to Segment Object Candidates
 Learning to Segment Object Candidates Pedro Pinheiro, Ronan Collobert and Piotr Dollar Presented by - Sivaraman, Kalpathy Sitaraman, M.S. in Computer Science, University of Virginia Facebook Artificial
Learning to Segment Object Candidates Pedro Pinheiro, Ronan Collobert and Piotr Dollar Presented by - Sivaraman, Kalpathy Sitaraman, M.S. in Computer Science, University of Virginia Facebook Artificial
1. Introduction. 2. Motivation and Problem Definition. Volume 8 Issue 2, February Susmita Mohapatra
 Pattern Recall Analysis of the Hopfield Neural Network with a Genetic Algorithm Susmita Mohapatra Department of Computer Science, Utkal University, India Abstract: This paper is focused on the implementation
Pattern Recall Analysis of the Hopfield Neural Network with a Genetic Algorithm Susmita Mohapatra Department of Computer Science, Utkal University, India Abstract: This paper is focused on the implementation
Ryerson University CP8208. Soft Computing and Machine Intelligence. Naive Road-Detection using CNNS. Authors: Sarah Asiri - Domenic Curro
 Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Kaggle Data Science Bowl 2017 Technical Report
 Kaggle Data Science Bowl 2017 Technical Report qfpxfd Team May 11, 2017 1 Team Members Table 1: Team members Name E-Mail University Jia Ding dingjia@pku.edu.cn Peking University, Beijing, China Aoxue Li
Kaggle Data Science Bowl 2017 Technical Report qfpxfd Team May 11, 2017 1 Team Members Table 1: Team members Name E-Mail University Jia Ding dingjia@pku.edu.cn Peking University, Beijing, China Aoxue Li
CENG 783. Special topics in. Deep Learning. AlchemyAPI. Week 11. Sinan Kalkan
 CENG 783 Special topics in Deep Learning AlchemyAPI Week 11 Sinan Kalkan TRAINING A CNN Fig: http://www.robots.ox.ac.uk/~vgg/practicals/cnn/ Feed-forward pass Note that this is written in terms of the
CENG 783 Special topics in Deep Learning AlchemyAPI Week 11 Sinan Kalkan TRAINING A CNN Fig: http://www.robots.ox.ac.uk/~vgg/practicals/cnn/ Feed-forward pass Note that this is written in terms of the
Alternatives to Direct Supervision
 CreativeAI: Deep Learning for Graphics Alternatives to Direct Supervision Niloy Mitra Iasonas Kokkinos Paul Guerrero Nils Thuerey Tobias Ritschel UCL UCL UCL TUM UCL Timetable Theory and Basics State of
CreativeAI: Deep Learning for Graphics Alternatives to Direct Supervision Niloy Mitra Iasonas Kokkinos Paul Guerrero Nils Thuerey Tobias Ritschel UCL UCL UCL TUM UCL Timetable Theory and Basics State of
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left