C18 Computer Vision. Lecture 1 Introduction: imaging geometry, camera calibration. Victor Adrian Prisacariu.
|
|
|
- Octavia Foster
- 5 years ago
- Views:
Transcription

1 C8 Computer Vision Lecture Introduction: imaging geometry, camera calibration Victor Adrian Prisacariu
2 InfiniTAM Demo
3 Course Content VP: Intro, basic image features, basic multiview geometry Introduction: imaging geometry, camera calibration. Salient feature detection: points, edges and SIFTs. Recovering 3D from two images I: epipolar geometry. Recovering 3D from two images II: stereo correspondences, triangulation, ego-motion. Slides at -> Teaching Lots borrowed from David Murray + AV C8. AV: Neural networks and applications Small baseline correspondences and optic flow. Large scale image retrieval. Fundamentals of convolutional neural networks. Object detection and recognition.

4 Useful Texts Multiple View Geometry in Computer Vision Richard Hartley, Andrew Zisserman Computer Vision: A Modern Approach David Forsyth, Jean Ponce Prentice Hall; ISBN: Dimensional Computer Vision: A Geometric Viewpoint Olivier Faugeras
5 Computer Vision: This time. Introduction: imaging geometry, camera calibration.. Introduction. 2. The perspective camera as a geometric device. 3. Perspective using homogeneous coordinates. 4. Calibration the elements of the perspective model. 2. Salient feature detection: points, edges and SIFTs. 3. Recovering 3D from two images I: epipolar geometry. 4. Recovering 3D from two images II: stereo correspondences, triangulation, ego-motion.

6 . Introduction Aim in geometric computational vision is to take a number of 2D images, and obtain an understanding of the 3D environment; what is in it; and how it evolves over time. What do we have here? seems very easy
7 Wrong! It s a very hard big data problem From the hardware engineering perspective The raw throughput is unsettlingly large: Colour stereo pair at 30Hz -> 00s MB/s. Now multiply by non-trivial processing cost per byte Image collections are huge. Certainly challenging, but no longer frightening. From applied maths perspective Scene info is made highly implicit or lost by reprojection. Inverse mappings 2D -> 3D ill-posed, ill-conditioned. Can only be solved by introducing constraints: about the way the world actually works; or about the way we expect it to work. We now know about these. No longer frightening.
8 Wrong! It s a very hard big data problem From the Information-Engineering / AI perspective Images have uneven information content both absolutely and contextually. Computational visual semantics: what does visual stuff mean exactly? If we are under time pressure, what is the important visual stuff right now? Still a massive challenge if we want genuine autonomy.
9 Natural vision is a hard problem But we see effortlessly! Yep, spot on if one neglects: the 0 neurons involved. aeons of evolution generating hardwire priors P(I). that we sleep with eyes shut, and avert gaze when thinking. Very hard work for our brains does machine vision have a hope? Perhaps building a general vision system is a flawed concept. Evidence that the human visual system is a bag of tricks specialized processing for specialized tasks. Perhaps we should expect no more of computer vision? However, the h.v.s. does give us a convincing magic show. Each trick flows seamlessly into the next. Do we have an inkling how that will be achieved?
10 So why bother? What are the advantages? From a sensor standpoint Vision is a passive sensor (unlike sonar, radar, lasers). Wide range of depths, overlaps and complements other sensors. Wide diversity of methods to recover 3D information: so vision has process redundancy. Images provide data redundancy. From a natural communications standpoint The world is awash with information-rich photons. Because we have eyes, vision provides a natural language of communication. If we want robots/man-machine-interfaces to act and interact in our environments, they have to speak that language.
11 Organizing the tricks Although human and computer vision might be bags of tricks, it is useful to place the tricks within larger processing paradigms. For example: a) Data-driven, bottom-up processing. b) Model-driven, top-down, generative processing. c) Dynamic Vision (mixes bottom-up with top-down feedback). d) Active Vision (task oriented). e) Data-driven discriminative approach (machine learning). These are neither all-embracing nor exclusive.
12 (a) Data-driven, bottom-up processing Image processing produces map of salient 2D features. Features input into a range of shape from X processes whose output was the 2.5D sketch. Only in the last stage we get a fully 3D objectcentered description.
13 (b) Model-driven, and (c) Dynamic vision Model-driven, top-down, generative processing: a model of the scene is assumed known. Supply a pose for the object relative to the camera, and use projection to predict where salient features should be found in the image space. Search for the features, and refine the pose by minimizing the observed deviation. Dynamic vision: mixes bottomup/top-down by introducing feedback. Top-down Dynamic
14 (d) Active Vision Introduces task-oriented sensing-perceptionaction loops: Visual data needs only be good enough to drive the particular action. No need to build and maintain an overarching representation of the surroundings. Computational resources focused where they are needed.
15 (e) Data-driven approach The aim is to learn a description of the transformation between input and output using exemplars. Geometry is not forgotten, but implicit learned representation are favored.
16 .2 The perspective camera as a geometric device
17 This is (a picture of) my cat x = Cat nose 520
18 My cat lives in a 3D world x = x. x / X = X. X / X 0 The point X in world space projects to the point x in image space
19 Going from X in 3D to x in 2D x = x. x /? X = X. X / X 0 film/sensor cat Output would be blurry L if film just exposed to the cat
20 Going from X in 3D to x in 2D x = x. x /? X = X. X / X 0 film/sensor barrier cat Blur reduced, looks good J
21 Pinhole Camera x = x. x /? X = X. X / X 0 Image Plane pinhole cat All rays pass through the center of projection (a single point). Image forms on the image plane.
22 Pinhole Camera image plane f X = X. X / X 0 p o Optical axis x = x. x / f focal length o camera origin p principal point The 3D point X = x. x / = f f X. X / X 0 is imaged into x = x. x / as:

23 .2 The perspective camera as a geometric device
24 Homogeneous coordinates The projection x = fx/x 0 is non-linear L. Can be made linear using homogeneous coordinates involves representing the image and scene in higher dimensional space. Limiting cases e.g. vanishing points are handled better. Homogeneous coordinates allow for transformations to be concatenated more easily.

25 3D Euclidean transforms: inhomogeneous coordinates My cat moves through 3D space. The movement of the tip of the nose can be described using an Euclidean transform: ; X 0. = R 0 0 X 0. + t 0. rotation translation
26 3D Euclidean transforms: inhomogeneous coordinates ; Euclidean transform: X 0. = R 0 0 X 0. + t 0. Concatenation of successive transform is a mess! X. = R. X + t. X / = R / X. + t / X / = R / R. X + t. + t / = R / R. X + R / t + t /.
27 3D Euclidean transforms: homogeneous coordinates We replace the 3D points X Y Z The Euclidean transform becomes: X = E X with a four vector = R t 0 G X X Y Z. Transformations can now be concatenated by matrix multiplication: X. = E.H X H X / = E /. X. X / = E /. E.H X 0
28 Homogeneous coordinates definition in R 0 X = X, Y, Z G is represented in homogeneous coordinates by any 4-vector X. X / X 0 X L such that X = X. /X L, Y = X / /X L, and Z = X 0 /X L. So the following homogeneous vectors represent the same point, for any λ 0: X. X / X 0 X L and λ X. X / X 0 X L E.g. 2,3,5, G is the same as 3, 4.5, 7.5,.5 G and both represent the same inhomogeneous point 2,3,5 G
29 Homogeneous coordinates definition in R / x = x, y G is represented in homogeneous coordinates by any 3-vector x. x / x 0 such that x = x. /x 0, y = x / /x 0. E.g.,2,3 G is the same as 3,6,9 G and both represent the same inhomogeneous point 0.33,0.66 G
30 Homogeneous notation rues for use. Convert the inhomogeneous point to an homogeneous vector: X X Y Y Z Z 2. Apply a 4 4 transform. 3. Dehomogenize the resulting vector: X. X / X 0 X L X. /X L X / /X L X 0 /X L

31 Projective transformations A projective transformation is a linear transformation on homogeneous 4-vectors represented by a non-singular 4x4 matrix. X. X / X 0 X L = p.. p./ p./ p.l p /. p // p /0 p /L p 0. p 0/ p 00 p 0L p L. p L/ p L0 p LL X. X / X 0 X L The effect on the homogenous points is that the original and transformed points are linked through a projection center. The 4x4 matrix is defined up to scale, and so has 5 degrees of freedom.
32 More 3D-3D and 2D-2D Transforms Projective (5 dof): X. X / = P X L L 0 X L Affine (2 dof): X = A 0 0 t 0 0 G Similarity (7 dof): X = SR 0 0 t 0 0 G Euclidean (6 dof): X = R 0 0 t 0 0 G X. X / X 0 X L X X X Projective (aka Homography, 8 dof): x ;. x ; / x ; 0 Affine (6 dof): = H 0 0 x. x / x 0 x = A 2 2 t / 0 G Similarity (5 dof): x = SR / / t / 0 G Euclidean (4 dof): x = R / 2 t 2 0 G x x x




33 2D-2D Transform Examples cos θ sin θ t a sin θ cos θ t b 0 0 scos θ ssin θ t a ssin θ scos θ t b 0 0 a.. a./ t a a /. a // t b 0 0 h.. h./ h./ h /. h // h /0 h 0. h 0/ h 00 Euclidean 3 DoF Similarity 4 DoF Affine 6 DoF Projective 8 DoF
34 Perspective 3D-2D Transforms Similar to a 3D-3D projective transform, but constrain the transformed point to a plane z = f. x. x z = f X ijklm = / f Because z = f is fixed, we can write: x. p.. p./ p./ p.l x λ / p /. p // p /0 p /L = f fp 0. fp 0/ fp 00 fp 0L p 0. p 0/ p 00 p 0L X. X / X 0 The 3 rd row is redundant, so: λ x. x / = p.. p./ p./ p.l p /. p // p /0 p /L p 0. p 0/ p 00 p 0L X. X / X 0 = P 0 L X. X / X 0 P 0 L is the projection matrix and this is a perspective transform
35 .3 Perspective using homogeneous coordinates x = x. x / x. x / = f f X = X. X / X 0 λ x. x / = f f X. X / X 0 λx. = fx. λx / = fx / λ = X 0 x. = f X. X 0 x / = f X / X 0
36 Perspective using homogeneous coordinates Image Point Projection Matrix World Point λ x. x / = f f X. X / X 0
37 Perspective using homogeneous coordinates It is useful to split up the overall projection matrix into three parts:. a part that depends on the internals of the camera 2. a vanilla projection matrix 3. a Euclidean transformation between the world and camera frames. We first assume the scene and world are aligned with the camera coords, so that the extrinsic camera matrix is identity and get: Image Point Camera s Intrinsic Calibration Projection matrix (vanilla) Camera s Extrinsic Calibration World Point λ x y f f X
38 Perspective using homogeneous coordinates Now let s make things more general: Insert a rotation R and translation t between world and camera coordinates. Insert some extra term in the intrinsic calibration matrix. Image Point Camera s Intrinsic Calibration Projection matrix (vanilla) Camera s Extrinsic Calibration World Point λ x y f sf u H 0 γf v r r.. r./ r.0 t. r /. r // r /0 t / r 0. r 0/ r 00 t X


39 The camera pose (extrinsic parameters) The camera s extrinsic calibration is just the rotation R and translation t that take points from the world frame to the camera frame. X t = R t 0 G X u
.")

40 Building R R captures rotation and can be built from various types of rotation representations (Euler angles, quaternions, etc.). Euler angles capture the angles of rotation axis using 3 parameters, one for each axis. X ; = R v X u = cos θ v sin θ v 0 sin θ v cos θ v X w X ;; = R b X ; = X x = R a X ;; = cos θ b 0 sin θ b 0 0 X ; sin θ b 0 cos θ b cos θ a ± sin θ a X ;; 0 sin θ a cos θ a R {u = R a R b R v Order matters!

41 Building t
42 Inverting the transform R {u t {u 0 G. = Ru{ t u{ 0 G For rotation: R u{ = R {u. = R {u G For translation: t u{ = t {u t u{ = R u{ t {u
43 The intrinsic calibration parameters Describe hardware properties of real cameras: The image plane might be skewed. The central axis of the lens might not line up with the optical axis. The light gathering elements might not be square. Lens distortion. K = f γf ~ s = f sf u r 0 γf v r 0 0 different scaling on x and y γ is the aspect ratio. Origin offset, (u r, v r ) is the principal point. s accounts for skew
44 Summary of steps from Scene to Image. Move scene point X u, G into camera coordinate by 4 4 extrinsic Euclidean transformation: X { R t = X u 0 G 2. Project into ideal camera via a vanilla perspective transformation: x = I 0 X{ 3. Map the ideal image into the real image using intrinsic matrix: x = K x
45 .4 Camera Calibration The process that finds K, and accounts for the internal physical characteristics of the camera. (Usually) done once per camera. There are a variety of method for self-calibration, auto-calibration or pre-calibration. We will gloss over pre-calibration, using a specially made known visual scene.
46 What is camera calibration? Image Point Camera s Intrinsic Calibration Projection matrix (vanilla) Camera s Extrinsic Calibration World Point λ x y f sf u H 0 γf v r r.. r./ r.0 t. r /. r // r /0 t / r 0. r 0/ r 00 t X λx K [I 0] P 0 L = K[R t] R t 0 G X Camera calibration: recover K
47 Camera Calibration Math Part. Recover overall projection matrix P 0 L. Assume target with at least 6 known scene points. Build and solve system of (at least) 2 equations. 2. Construct P Š Œ x = p.. KR p./ from p.0 p X.L leftmost 3x3 block λ y = p of P = K[R t]. /. p // p /0 p Y /L Z p 0. p 0/ p 00 p 0L 3. Invert P Š Œ so P Š Œ = R. K.. λ = p 4. Decompose P 0. X + p Š Œ using 0/ Y + p 00 Z + p QR decomposition 0L p 0. X + p 0/ Y + p 00 Z + p 0L x = p.. X + p./ Y + p.0 Z + p.l into p 0. RX and + p 0/ Y K. + p 00 Z + p 0L y = p /. X + p // Y + p /0 Z + p /L 5. Normalise K (as scale of P was unknown). X Y Z Recover t = K. 0 0 X x Y x Z x x X Y Z p.l X y p Y /L y Z p G /L y y. p = 0 0 where p contains the unknowns.
48 Camera Calibration Math Part. Recover overall projection matrix P 0 L. Assume target with at least 6 known scene points. Build and solve system of (at least) 2 equations. 2. Construct P Š Œ = KR from leftmost 3x3 block of P = K[R t]. 3. Invert P Š Œ so P Š Œ = R. K.. 4. Decompose P P Š Œ using G QR decomposition p into R and K... p./ p.0 p.l P = p /. p // p /0 p /L 5. Normalise K (as pscale 0. 0/ of p 00 Pp 0L was unknown). 6. Recover t = K. p.l p /L p G /L.
49 Camera Calibration Math Part. Recover overall projection matrix P 0 L. Assume target with at least 6 known scene points. Build and solve system of (at least) 2 equations. 2. Construct P Š Œ = KR from leftmost 3x3 block of P = K[R t]. 3. Invert P Š Œ so P Š Œ = R. K.. 4. Decompose P Š Œ using QR decomposition into R and K. 5. Normalise K (as scale of - P was unknown) Recover P. t = K R. K K p.l p /L p G G /L. R
50 Camera Calibration Math Part. Recover overall projection matrix P 0 L. Assume target with at least 6 known scene points. Build and solve system of (at least) 2 equations. 2. Construct P Š Œ = KR from leftmost 3x3 block of P = K[R t]. 3. Invert P Š Œ so P Š Œ = R. K.. 4. Decompose P Š Œ using QR decomposition into R and K. 5. Normalise K (as scale of P was unknown). 6. Recover t = K. p.l p /L p G 0L.
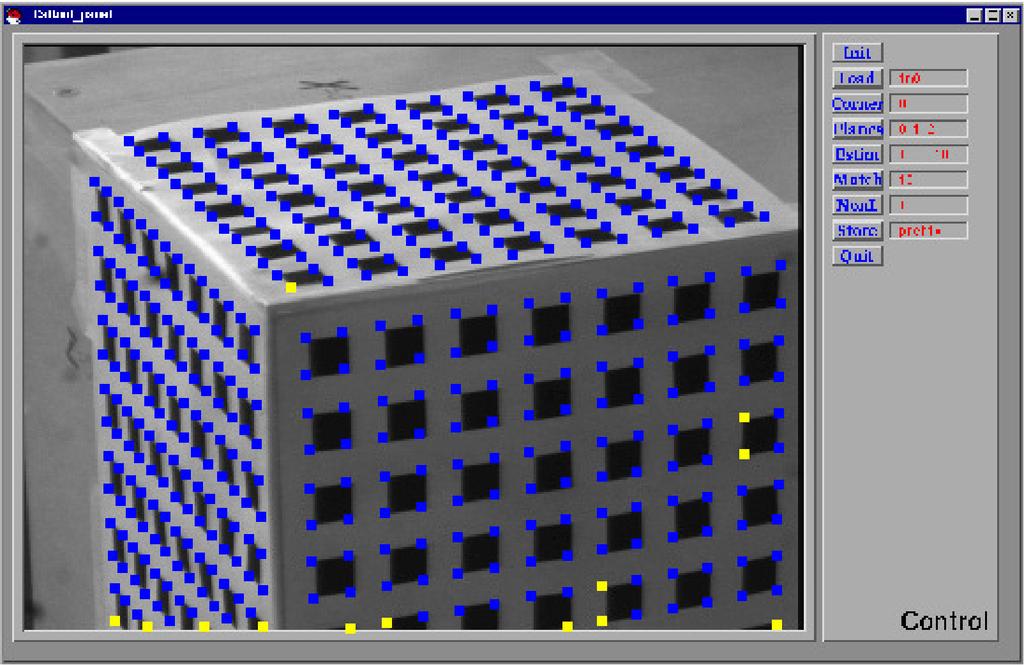
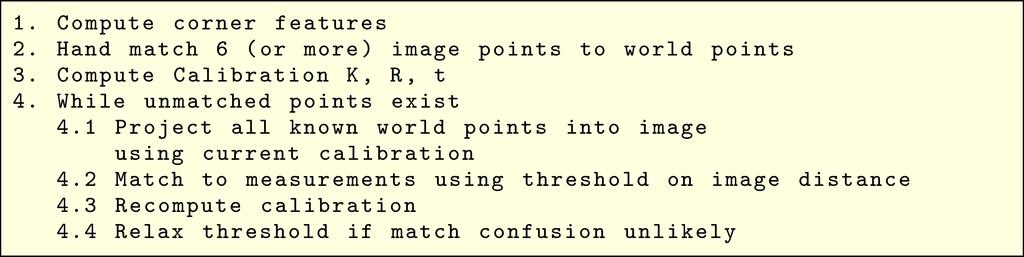
51 Camera Calibration Example Algorithm


52 Radial Distortion So far, we have figured out the transformations that turn our camera into a notional camera with the world and the camera coordinates aligned and an ideal image plane. One often has to correct for the other optical distortions and aberrations. Radial distortion is the most common see the Q sheet. Correction for this distortion is applied before carrying out calibration.
53 Practical Camera Calibration Matlab Calibration Toolkit
54 Summary of Lecture In this lecture we have: Introduced the aims of computer vision, and some paradigms. Explored linear transformations and introduced homogeneous coordinates. Defined perspective projection from a scene, and saw that it could be made linear using homogeneous coordinates. Discussed how to pre-calibrate a camera using image of six or more known scene points.
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Augmented Reality II - Camera Calibration - Gudrun Klinker May 11, 2004
 Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Sameer Agarwal LECTURE 1 Image Formation 1.1. The geometry of image formation We begin by considering the process of image formation when a
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Sameer Agarwal LECTURE 1 Image Formation 1.1. The geometry of image formation We begin by considering the process of image formation when a
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
C / 35. C18 Computer Vision. David Murray. dwm/courses/4cv.
 C18 2015 1 / 35 C18 Computer Vision David Murray david.murray@eng.ox.ac.uk www.robots.ox.ac.uk/ dwm/courses/4cv Michaelmas 2015 C18 2015 2 / 35 Computer Vision: This time... 1. Introduction; imaging geometry;
C18 2015 1 / 35 C18 Computer Vision David Murray david.murray@eng.ox.ac.uk www.robots.ox.ac.uk/ dwm/courses/4cv Michaelmas 2015 C18 2015 2 / 35 Computer Vision: This time... 1. Introduction; imaging geometry;
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Computer Vision: Lecture 3
 Computer Vision: Lecture 3 Carl Olsson 2019-01-29 Carl Olsson Computer Vision: Lecture 3 2019-01-29 1 / 28 Todays Lecture Camera Calibration The inner parameters - K. Projective vs. Euclidean Reconstruction.
Computer Vision: Lecture 3 Carl Olsson 2019-01-29 Carl Olsson Computer Vision: Lecture 3 2019-01-29 1 / 28 Todays Lecture Camera Calibration The inner parameters - K. Projective vs. Euclidean Reconstruction.
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Structure from Motion
 Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Lecture 3: Camera Calibration, DLT, SVD
 Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
Agenda. Perspective projection. Rotations. Camera models
 Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Structure from Motion CSC 767
 Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Recovering structure from a single view Pinhole perspective projection
 EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Introduction to Homogeneous coordinates
 Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Week 2: Two-View Geometry. Padua Summer 08 Frank Dellaert
 Week 2: Two-View Geometry Padua Summer 08 Frank Dellaert Mosaicking Outline 2D Transformation Hierarchy RANSAC Triangulation of 3D Points Cameras Triangulation via SVD Automatic Correspondence Essential
Week 2: Two-View Geometry Padua Summer 08 Frank Dellaert Mosaicking Outline 2D Transformation Hierarchy RANSAC Triangulation of 3D Points Cameras Triangulation via SVD Automatic Correspondence Essential
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Camera calibration. Robotic vision. Ville Kyrki
 Camera calibration Robotic vision 19.1.2017 Where are we? Images, imaging Image enhancement Feature extraction and matching Image-based tracking Camera models and calibration Pose estimation Motion analysis
Camera calibration Robotic vision 19.1.2017 Where are we? Images, imaging Image enhancement Feature extraction and matching Image-based tracking Camera models and calibration Pose estimation Motion analysis
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
2D/3D Geometric Transformations and Scene Graphs
 2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
Geometry of image formation
 eometry of image formation Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 3, 2008 Talk Outline
eometry of image formation Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 3, 2008 Talk Outline
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Reminder: Lecture 20: The Eight-Point Algorithm. Essential/Fundamental Matrix. E/F Matrix Summary. Computing F. Computing F from Point Matches
 Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
METR Robotics Tutorial 2 Week 2: Homogeneous Coordinates
 METR4202 -- Robotics Tutorial 2 Week 2: Homogeneous Coordinates The objective of this tutorial is to explore homogenous transformations. The MATLAB robotics toolbox developed by Peter Corke might be a
METR4202 -- Robotics Tutorial 2 Week 2: Homogeneous Coordinates The objective of this tutorial is to explore homogenous transformations. The MATLAB robotics toolbox developed by Peter Corke might be a
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Camera models and calibration
 Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe : Martin Stiaszny and Dana Qu LECTURE 0 Camera Calibration 0.. Introduction Just like the mythical frictionless plane, in real life we will
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe : Martin Stiaszny and Dana Qu LECTURE 0 Camera Calibration 0.. Introduction Just like the mythical frictionless plane, in real life we will
Math background. 2D Geometric Transformations. Implicit representations. Explicit representations. Read: CS 4620 Lecture 6
 Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
More Mosaic Madness. CS194: Image Manipulation & Computational Photography. Steve Seitz and Rick Szeliski. Jeffrey Martin (jeffrey-martin.
 More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
An idea which can be used once is a trick. If it can be used more than once it becomes a method
 An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
3D Modeling using multiple images Exam January 2008
 3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
Instance-level recognition I. - Camera geometry and image alignment
 Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Geometric Transformations
 Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Jayson Smith LECTURE 4 Planar Scenes and Homography 4.1. Points on Planes This lecture examines the special case of planar scenes. When talking
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Jayson Smith LECTURE 4 Planar Scenes and Homography 4.1. Points on Planes This lecture examines the special case of planar scenes. When talking
Computer Vision CSCI-GA Assignment 1.
 Computer Vision CSCI-GA.2272-001 Assignment 1. September 22, 2017 Introduction This assignment explores various methods for aligning images and feature extraction. There are four parts to the assignment:
Computer Vision CSCI-GA.2272-001 Assignment 1. September 22, 2017 Introduction This assignment explores various methods for aligning images and feature extraction. There are four parts to the assignment:
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Structure from Motion and Multi- view Geometry. Last lecture
 Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
3D Vision Real Objects, Real Cameras. Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun,
, 12 (parts of) Computerized Image Analysis MN2 Anders Brun,") 3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
CSCI 5980/8980: Assignment #4. Fundamental Matrix
 Submission CSCI 598/898: Assignment #4 Assignment due: March 23 Individual assignment. Write-up submission format: a single PDF up to 5 pages (more than 5 page assignment will be automatically returned.).
Submission CSCI 598/898: Assignment #4 Assignment due: March 23 Individual assignment. Write-up submission format: a single PDF up to 5 pages (more than 5 page assignment will be automatically returned.).