Image Transformations & Camera Calibration. Mašinska vizija, 2018.
|
|
|
- Matilda Douglas
- 5 years ago
- Views:
Transcription
1 Image Transformations & Camera Calibration Mašinska vizija, 2018.
2 Image transformations
3 What ve we learnt so far?
4
5
6
7
8
9
10
11
12
13
14
15 Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize transformation Perform image rotation for a predefined angle
16
17 Example 2 perspective transform Open perspective_warp_template.cpp Define two sets of corner points srcquad and dstquad Points are cv::point2f type Use.cols nad.rows to define the original image corners Define arbitrary corners for the new image Use cv::getperspetivetransform with generated pairs of points to acquire the transformation matrix. Apply the matrix and warp the image


18 Example 2 perspective transform Open perspective_warp_template.cpp Define two sets of corner points srcquad and dstquad Points are cv::point2f type Use.cols nad.rows to define the original image corners Define arbitrary corners for the new image Use cv::getperspetivetransform with generated pairs of points to acquire the transformation matrix. Apply the matrix and warp the image
19 Image formation What 3D world information is stored in each pixel? Image formation is a process that produces a particular image given: A set of lighting conditions Scene geometry Surface properties Camera optics Are parallel lines in the real world parallel in the image? Are straight lines in the real world straight in the image?
20
21
22
23 Pinhole camera model
24 Pinhole camera model

25 Pinhole vs. real camera model
26 3D coordinates to pixel coordinates?
27 Camera matrix
28
29
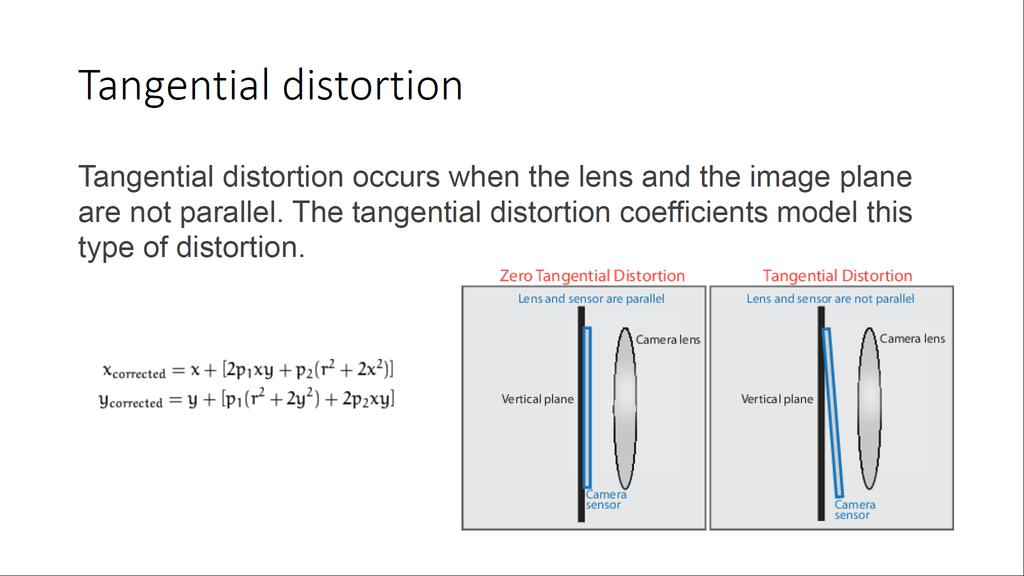
30 Distortion

31 Distortion example
32
33
34
35
36 Camera calibration
37 Camera Calibration, Why? Camera calibration is a necessary step in 3D computer vision. A calibrated camera can be used as a quantitative sensor It is essential in many applications to recover 3D quantitative measures about the observed scene from 2D images. Such as 3D Euclidean structure. From a calibrated camera we can measure how far an object is from the camera, or the height of the object, etc. e.g., object avoidance in robot navigation.
38
39
40 Camera calibration Find the intrinsic and extrinsic parameters of a camera Extrinsic parameters: the camera s location and orientation in the world. Intrinsic parameters: the relationships between pixel coordinates and camera coordinates. Find the distortion coefficients of the camera Radial Tangential VERY large literature on the subject Good calibration is important when we need to: Reconstruct a world model. Interact with the world: Robot, hand-eye coordination
41 Basic idea 1. Given a set of world points Pi and their image coordinates (ui,vi) 2. Find the projection matrix M 3. and then find intrinsic and extrinsic parameters. To estimate the camera parameters, we need to have 3-D world points and their corresponding 2-D image points. These correspondences are acquired using multiple images of a calibration pattern, such as a checkerboard. Using the correspondences, we can solve for the camera parameters.
42 How many parameters are we looking for?
43 Calibration Techniques Calibration using 3D calibration object Calibration using 2D planer pattern Calibration using 1D object (line-based calibration) Self Calibration: no calibration objects Vanishing points from for orthogonal direction Many other smart ideas

44 Calibration Techniques Calibration using 3D calibration object: Calibration is performed by observing a calibration object whose geometry in 3D space is known with very good precision. Calibration object usually consists of two or three planes orthogonal to each other, e.g. calibration cube Calibration can also be done with a plane undergoing a precisely known translation (Tsai approach) (+) most accurate calibration, simple theory (-) more expensive, more elaborate setup

45 Calibration Techniques 2D plane-based calibration Requires observation of a planar pattern shown at few different orientations No need to know the plane motion Set up is easy, the most popular approach.
46 Calibration Techniques Self-calibration: Techniques in this category do not use any calibration object Only image point correspondences are required Just move the camera in a static scene and obtain multiple images Correspondences between three images are sufficient to recover both the internal and external parameters
47 Calibration Techniques Which calibration technique to use? Calibration with apparatus versus self-calibration: Whenever possible, if you can pre-calibrate the camera, you should do it with a calibration object Self-calibration cannot usually achieve the same accuracy as calibration with an object. Sometimes pre-calibration is impossible (e.g., a scene reconstruction from an old movie), self-calibration is the only choice.

48 Calibration Techniques Calibration using 3D calibration object Calibration using 2D planer pattern Calibration using 1D object (line-based calibration) Self Calibration: no calibration objects 2D planer pattern approaches seems to be a good compromise: good accuracy with simple setup 1D object is suitable for calibrating multiple cameras at once.
49
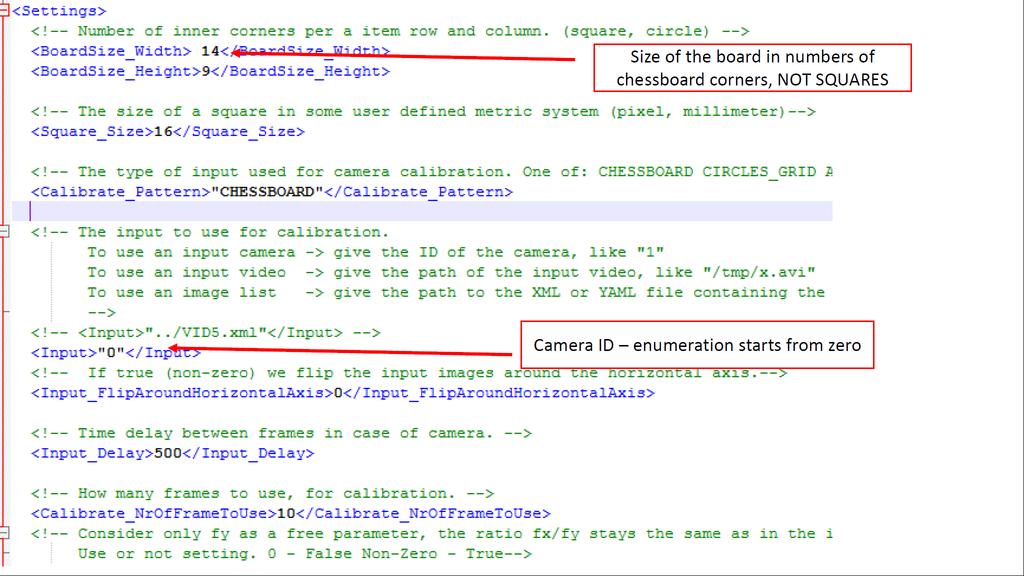
50
51
52
53
54

55
56
57 Example 3 perform camera calibration Create New Project (New Project -> Win32 console application -> Next -> Empty project -> Finish) Add OpenCV Property pages Add camera_calibration_with_debug.cpp to Source files Adjust the path to the config file in_vid5.xml Open the config file
58
59
60
61
62
63
64
65
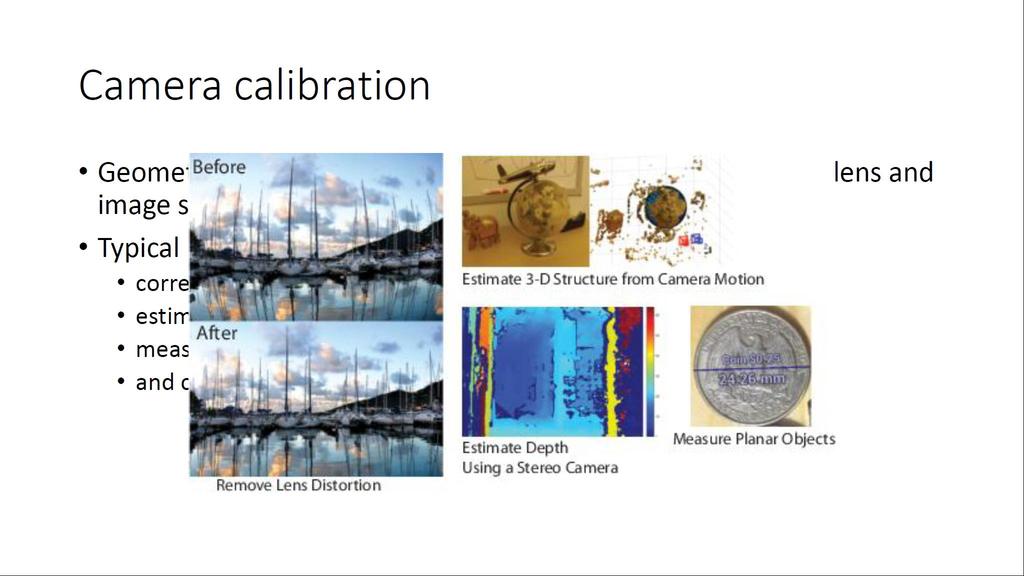
66
67
68

69
70
71
72

73 Geometric camera calibration, also referred to as camera resectioning, estimates the parameters of a lens and image sensor of an image or video camera. You can use these parameters to correct for lens distortion, measure the size of an object in world units, or determine the location of the camera in the scene. These tasks are used in applications such as machine vision to detect and measure objects. They are also used in robotics, for navigation systems, and 3-D scene reconstruction. Examples of what you can do after calibrating your camera:
74 Pinhole camera model A pinhole camera is a simple camera without a lens and with a single small aperture. Light rays pass through the aperture and project an inverted image on the opposite side of the camera. Think of the virtual image plane as being in front of the camera and containing the upright image of the scene. As a result, the image on this image plane (also called the projective plane) is always in focus, and the size ofthe image relative to the distant object is given by a single parameter ofthe camera: its focal length. For our idealized pinhole camera, the distance from the pinhole aperture to the screen is precisely the focal length
75 Reference [1] OpenCV dev Documentation [2] Adrian Kaehler and Gary Bradski Learning OpenCV 3: Computer Vision in C++ with the OpenCV Library (1st ed.). O'Reilly Media, Inc.. [3] [4] Kenneth Dawson-Howe A Practical Introduction to Computer Vision with OpenCV (1st ed.). Wiley Publishing. [5] Zhang, Z. "A Flexible New Technique for Camera Calibration." IEEE Transactions on Pattern Analysis and Machine Intelligence. Vol. 22, No. 11, 2000, pp [6] [7] %20Poboljsanje%20kvaliteta%20slike%20-%20prostorne%20operacije.pdf
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Autonomous Floor Cleaning Prototype Robot Based on Image Processing
 Autonomous Floor Cleaning Prototype Robot Based on Image Processing A.Charles, 1 PG Scholar, Kumaraguru College of Technology, Coimbatore, India Varunac1186@gmail.com Dr. Rani Thottungal, 2 Head of the
Autonomous Floor Cleaning Prototype Robot Based on Image Processing A.Charles, 1 PG Scholar, Kumaraguru College of Technology, Coimbatore, India Varunac1186@gmail.com Dr. Rani Thottungal, 2 Head of the
Robot Vision: Camera calibration
 Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
CAMERA CALIBRATION FOR VISUAL ODOMETRY SYSTEM
 SCIENTIFIC RESEARCH AND EDUCATION IN THE AIR FORCE-AFASES 2016 CAMERA CALIBRATION FOR VISUAL ODOMETRY SYSTEM Titus CIOCOIU, Florin MOLDOVEANU, Caius SULIMAN Transilvania University, Braşov, Romania (ciocoiutitus@yahoo.com,
SCIENTIFIC RESEARCH AND EDUCATION IN THE AIR FORCE-AFASES 2016 CAMERA CALIBRATION FOR VISUAL ODOMETRY SYSTEM Titus CIOCOIU, Florin MOLDOVEANU, Caius SULIMAN Transilvania University, Braşov, Romania (ciocoiutitus@yahoo.com,
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Camera models and calibration
 Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Projector Calibration for Pattern Projection Systems
 Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Assignment 2 : Projection and Homography
 TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
EECS 4330/7330 Introduction to Mechatronics and Robotic Vision, Fall Lab 1. Camera Calibration
 1 Lab 1 Camera Calibration Objective In this experiment, students will use stereo cameras, an image acquisition program and camera calibration algorithms to achieve the following goals: 1. Develop a procedure
1 Lab 1 Camera Calibration Objective In this experiment, students will use stereo cameras, an image acquisition program and camera calibration algorithms to achieve the following goals: 1. Develop a procedure
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Humanoid Robotics. Projective Geometry, Homogeneous Coordinates. (brief introduction) Maren Bennewitz
 Maren Bennewitz") Humanoid Robotics Projective Geometry, Homogeneous Coordinates (brief introduction) Maren Bennewitz Motivation Cameras generate a projected image of the 3D world In Euclidian geometry, the math for describing
Humanoid Robotics Projective Geometry, Homogeneous Coordinates (brief introduction) Maren Bennewitz Motivation Cameras generate a projected image of the 3D world In Euclidian geometry, the math for describing
Epipolar Geometry in Stereo, Motion and Object Recognition
 Epipolar Geometry in Stereo, Motion and Object Recognition A Unified Approach by GangXu Department of Computer Science, Ritsumeikan University, Kusatsu, Japan and Zhengyou Zhang INRIA Sophia-Antipolis,
Epipolar Geometry in Stereo, Motion and Object Recognition A Unified Approach by GangXu Department of Computer Science, Ritsumeikan University, Kusatsu, Japan and Zhengyou Zhang INRIA Sophia-Antipolis,
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Sameer Agarwal LECTURE 1 Image Formation 1.1. The geometry of image formation We begin by considering the process of image formation when a
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Sameer Agarwal LECTURE 1 Image Formation 1.1. The geometry of image formation We begin by considering the process of image formation when a
Course 23: Multiple-View Geometry For Image-Based Modeling
 Course 23: Multiple-View Geometry For Image-Based Modeling Jana Kosecka (CS, GMU) Yi Ma (ECE, UIUC) Stefano Soatto (CS, UCLA) Rene Vidal (Berkeley, John Hopkins) PRIMARY REFERENCE 1 Multiple-View Geometry
Course 23: Multiple-View Geometry For Image-Based Modeling Jana Kosecka (CS, GMU) Yi Ma (ECE, UIUC) Stefano Soatto (CS, UCLA) Rene Vidal (Berkeley, John Hopkins) PRIMARY REFERENCE 1 Multiple-View Geometry
COS429: COMPUTER VISON CAMERAS AND PROJECTIONS (2 lectures)
") COS429: COMPUTER VISON CMERS ND PROJECTIONS (2 lectures) Pinhole cameras Camera with lenses Sensing nalytical Euclidean geometry The intrinsic parameters of a camera The extrinsic parameters of a camera
COS429: COMPUTER VISON CMERS ND PROJECTIONS (2 lectures) Pinhole cameras Camera with lenses Sensing nalytical Euclidean geometry The intrinsic parameters of a camera The extrinsic parameters of a camera
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
(Geometric) Camera Calibration
 Camera Calibration") (Geoetric) Caera Calibration CS635 Spring 217 Daniel G. Aliaga Departent of Coputer Science Purdue University Caera Calibration Caeras and CCDs Aberrations Perspective Projection Calibration Caeras First
(Geoetric) Caera Calibration CS635 Spring 217 Daniel G. Aliaga Departent of Coputer Science Purdue University Caera Calibration Caeras and CCDs Aberrations Perspective Projection Calibration Caeras First
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Agenda. Perspective projection. Rotations. Camera models
 Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Calibrating an Overhead Video Camera
 Calibrating an Overhead Video Camera Raul Rojas Freie Universität Berlin, Takustraße 9, 495 Berlin, Germany http://www.fu-fighters.de Abstract. In this section we discuss how to calibrate an overhead video
Calibrating an Overhead Video Camera Raul Rojas Freie Universität Berlin, Takustraße 9, 495 Berlin, Germany http://www.fu-fighters.de Abstract. In this section we discuss how to calibrate an overhead video
Introduction to 3D Machine Vision
 Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Multiple View Reconstruction of Calibrated Images using Singular Value Decomposition
 Multiple View Reconstruction of Calibrated Images using Singular Value Decomposition Ayan Chaudhury, Abhishek Gupta, Sumita Manna, Subhadeep Mukherjee, Amlan Chakrabarti Abstract Calibration in a multi
Multiple View Reconstruction of Calibrated Images using Singular Value Decomposition Ayan Chaudhury, Abhishek Gupta, Sumita Manna, Subhadeep Mukherjee, Amlan Chakrabarti Abstract Calibration in a multi
IEEE Consumer Electronics Society Calibrating a VR Camera. Adam Rowell CTO, Lucid VR
 IEEE Consumer Electronics Society Calibrating a VR Camera Adam Rowell CTO, Lucid VR adam@lucidcam.com Virtual Reality Cameras Lucid VR Camera How Does it Work? Lucid Software Technology Recording: Synchronization
IEEE Consumer Electronics Society Calibrating a VR Camera Adam Rowell CTO, Lucid VR adam@lucidcam.com Virtual Reality Cameras Lucid VR Camera How Does it Work? Lucid Software Technology Recording: Synchronization
Project Title: Welding Machine Monitoring System Phase II. Name of PI: Prof. Kenneth K.M. LAM (EIE) Progress / Achievement: (with photos, if any)
 Progress / Achievement: (with photos, if any)") Address: Hong Kong Polytechnic University, Phase 8, Hung Hom, Kowloon, Hong Kong. Telephone: (852) 3400 8441 Email: cnerc.steel@polyu.edu.hk Website: https://www.polyu.edu.hk/cnerc-steel/ Project Title:
Address: Hong Kong Polytechnic University, Phase 8, Hung Hom, Kowloon, Hong Kong. Telephone: (852) 3400 8441 Email: cnerc.steel@polyu.edu.hk Website: https://www.polyu.edu.hk/cnerc-steel/ Project Title:
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
Viewing. Announcements. A Note About Transformations. Orthographic and Perspective Projection Implementation Vanishing Points
 Viewing Announcements. A Note About Transformations. Orthographic and Perspective Projection Implementation Vanishing Points Viewing Announcements. A Note About Transformations. Orthographic and Perspective
Viewing Announcements. A Note About Transformations. Orthographic and Perspective Projection Implementation Vanishing Points Viewing Announcements. A Note About Transformations. Orthographic and Perspective
CSCI 5980: Assignment #3 Homography
 Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
A General Expression of the Fundamental Matrix for Both Perspective and Affine Cameras
 A General Expression of the Fundamental Matrix for Both Perspective and Affine Cameras Zhengyou Zhang* ATR Human Information Processing Res. Lab. 2-2 Hikari-dai, Seika-cho, Soraku-gun Kyoto 619-02 Japan
A General Expression of the Fundamental Matrix for Both Perspective and Affine Cameras Zhengyou Zhang* ATR Human Information Processing Res. Lab. 2-2 Hikari-dai, Seika-cho, Soraku-gun Kyoto 619-02 Japan
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
NAME VCamera camera model representation
 NAME VCamera camera model representation SYNOPSIS #include void VRegisterCameraType (void); extern VRepnKind VCameraRepn; VCamera camera; ld... -lvcam -lvista -lm -lgcc... DESCRIPTION
NAME VCamera camera model representation SYNOPSIS #include void VRegisterCameraType (void); extern VRepnKind VCameraRepn; VCamera camera; ld... -lvcam -lvista -lm -lgcc... DESCRIPTION
One or more objects A viewer with a projection surface Projectors that go from the object(s) to the projection surface
 to the projection surface") Classical Viewing Viewing requires three basic elements One or more objects A viewer with a projection surface Projectors that go from the object(s) to the projection surface Classical views are based
Classical Viewing Viewing requires three basic elements One or more objects A viewer with a projection surface Projectors that go from the object(s) to the projection surface Classical views are based
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, less
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, less
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
521466S Machine Vision Exercise #1 Camera models
 52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
Il colore: acquisizione e visualizzazione. Lezione 17: 11 Maggio 2012
 Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Chapters 1 7: Overview
 Chapters 1 7: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 7: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapter
Chapters 1 7: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 7: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapter
Exterior Orientation Parameters
 Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
C18 Computer Vision. Lecture 1 Introduction: imaging geometry, camera calibration. Victor Adrian Prisacariu.
 C8 Computer Vision Lecture Introduction: imaging geometry, camera calibration Victor Adrian Prisacariu http://www.robots.ox.ac.uk/~victor InfiniTAM Demo Course Content VP: Intro, basic image features,
C8 Computer Vision Lecture Introduction: imaging geometry, camera calibration Victor Adrian Prisacariu http://www.robots.ox.ac.uk/~victor InfiniTAM Demo Course Content VP: Intro, basic image features,
3-D D Euclidean Space - Vectors
 3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
3D-2D Laser Range Finder calibration using a conic based geometry shape
 3D-2D Laser Range Finder calibration using a conic based geometry shape Miguel Almeida 1, Paulo Dias 1, Miguel Oliveira 2, Vítor Santos 2 1 Dept. of Electronics, Telecom. and Informatics, IEETA, University
3D-2D Laser Range Finder calibration using a conic based geometry shape Miguel Almeida 1, Paulo Dias 1, Miguel Oliveira 2, Vítor Santos 2 1 Dept. of Electronics, Telecom. and Informatics, IEETA, University
Another Look at Camera Control
 Another Look at Camera Control Karan Singh, Cindy Grimm, Nisha Sudarsanan Media and Machines Lab Department of Computer Science and Engineering Washington University in St. Louis University of Toronto
Another Look at Camera Control Karan Singh, Cindy Grimm, Nisha Sudarsanan Media and Machines Lab Department of Computer Science and Engineering Washington University in St. Louis University of Toronto
3D from Images - Assisted Modeling, Photogrammetry. Marco Callieri ISTI-CNR, Pisa, Italy
 3D from Images - Assisted Modeling, Photogrammetry Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, cheaper
3D from Images - Assisted Modeling, Photogrammetry Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, cheaper
Computer Vision I. Dense Stereo Correspondences. Anita Sellent 1/15/16
 Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Classical and Computer Viewing. Adapted From: Ed Angel Professor of Emeritus of Computer Science University of New Mexico
 Classical and Computer Viewing Adapted From: Ed Angel Professor of Emeritus of Computer Science University of New Mexico Planar Geometric Projections Standard projections project onto a plane Projectors
Classical and Computer Viewing Adapted From: Ed Angel Professor of Emeritus of Computer Science University of New Mexico Planar Geometric Projections Standard projections project onto a plane Projectors
Three-Dimensional Hand Tracking and Surface-Geometry Measurement for a Robot-Vision System
 Three-Dimensional Hand Tracking and Surface-Geometry Measurement for a Robot-Vision System by Chris Yu-liang Liu A thesis presented to the University of Waterloo in fulfillment of the thesis requirement
Three-Dimensional Hand Tracking and Surface-Geometry Measurement for a Robot-Vision System by Chris Yu-liang Liu A thesis presented to the University of Waterloo in fulfillment of the thesis requirement
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Lecture 7 Measurement Using a Single Camera. Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016
 Lecture 7 Measurement Using a Single Camera Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016 If I have an image containing a coin, can you tell me the diameter of that coin? Contents
Lecture 7 Measurement Using a Single Camera Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016 If I have an image containing a coin, can you tell me the diameter of that coin? Contents
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Image formation. Thanks to Peter Corke and Chuck Dyer for the use of some slides
 Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Hand-Eye Calibration from Image Derivatives
 Hand-Eye Calibration from Image Derivatives Abstract In this paper it is shown how to perform hand-eye calibration using only the normal flow field and knowledge about the motion of the hand. The proposed
Hand-Eye Calibration from Image Derivatives Abstract In this paper it is shown how to perform hand-eye calibration using only the normal flow field and knowledge about the motion of the hand. The proposed
Equidistant Fish-Eye Calibration and Rectification by Vanishing Point Extraction
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 32, NO. X, XXXXXXX 2010 1 Equidistant Fish-Eye Calibration and Rectification by Vanishing Point Extraction Ciarán Hughes, Member, IEEE,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 32, NO. X, XXXXXXX 2010 1 Equidistant Fish-Eye Calibration and Rectification by Vanishing Point Extraction Ciarán Hughes, Member, IEEE,
Image Formation I Chapter 2 (R. Szelisky)
") Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Robotics - Projective Geometry and Camera model. Marcello Restelli
 Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing points & line http://www.wetcanvas.com/ http://pennpaint.blogspot.com/ http://www.joshuanava.biz/perspective/in-other-words-the-observer-simply-points-in-thesame-direction-as-the-lines-in-order-to-find-their-vanishing-point.html
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing points & line http://www.wetcanvas.com/ http://pennpaint.blogspot.com/ http://www.joshuanava.biz/perspective/in-other-words-the-observer-simply-points-in-thesame-direction-as-the-lines-in-order-to-find-their-vanishing-point.html
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Recovery of Intrinsic and Extrinsic Camera Parameters Using Perspective Views of Rectangles
 177 Recovery of Intrinsic and Extrinsic Camera Parameters Using Perspective Views of Rectangles T. N. Tan, G. D. Sullivan and K. D. Baker Department of Computer Science The University of Reading, Berkshire
177 Recovery of Intrinsic and Extrinsic Camera Parameters Using Perspective Views of Rectangles T. N. Tan, G. D. Sullivan and K. D. Baker Department of Computer Science The University of Reading, Berkshire
2 DETERMINING THE VANISHING POINT LOCA- TIONS
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL.??, NO.??, DATE 1 Equidistant Fish-Eye Calibration and Rectiication by Vanishing Point Extraction Abstract In this paper we describe
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL.??, NO.??, DATE 1 Equidistant Fish-Eye Calibration and Rectiication by Vanishing Point Extraction Abstract In this paper we describe
Lecture 3: Camera Calibration, DLT, SVD
 Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe : Martin Stiaszny and Dana Qu LECTURE 0 Camera Calibration 0.. Introduction Just like the mythical frictionless plane, in real life we will
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe : Martin Stiaszny and Dana Qu LECTURE 0 Camera Calibration 0.. Introduction Just like the mythical frictionless plane, in real life we will
Camera Calibration for Video See-Through Head-Mounted Display. Abstract. 1.0 Introduction. Mike Bajura July 7, 1993
 Camera Calibration for Video See-Through Head-Mounted Display Mike Bajura July 7, 1993 Abstract This report describes a method for computing the parameters needed to model a television camera for video
Camera Calibration for Video See-Through Head-Mounted Display Mike Bajura July 7, 1993 Abstract This report describes a method for computing the parameters needed to model a television camera for video
Computer Vision Project-1
 University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Camera model and calibration
 and calibration AVIO tristan.moreau@univ-rennes1.fr Laboratoire de Traitement du Signal et des Images (LTSI) Université de Rennes 1. Mardi 21 janvier 1 AVIO tristan.moreau@univ-rennes1.fr and calibration
and calibration AVIO tristan.moreau@univ-rennes1.fr Laboratoire de Traitement du Signal et des Images (LTSI) Université de Rennes 1. Mardi 21 janvier 1 AVIO tristan.moreau@univ-rennes1.fr and calibration