Vision and Image Processing Lab., CRV Tutorial day- May 30, 2010 Ottawa, Canada
|
|
|
- Angel Matthews
- 5 years ago
- Views:
Transcription
1 Spatio-Temporal Salient Features Amir H. Shabani Vision and Image Processing Lab., University of Waterloo, ON CRV Tutorial day- May 30, 2010 Ottawa, Canada 1



2 Applications Automated surveillance for scene analysis, Elderly home monitoring for assisted living, Content-based video retrieval, Video analysis Human-computer interaction (HCI), 2

3 Application Human Action Recognition (Weizmann data set) 3
4 Motivations Conventional video analysis methods require tracking the objects or features and motion estimation. segmentation is hard in presence of non-stationary background or sensory. appearance/ motion model varies from one object to another. 4
5 Motivations (2) Conventional video analysis methods require tracking the objects or features and motion estimation. segmentation is hard in presence of non-stationary background or sensory. appearance/ motion model varies from one object to another. Q: is there any way to bypass these tasks or perform them implicitly? there are key frames and key places in the video that carry most information of what is happening in the video. The key space-time points correspond to the video events. Salient features characterize the video events. 5


6 Motivation (3): from image to video Spatial Salient Features Applications: Tracking, Object Recognition,... 6
7 Salient Feature Extraction Salient feature extraction consists of three steps: Video filtering at different spatio-temporal scales Key point detection Key point description using the characteristic of the point s surrounding volume. Key point detection: (1) Saliency map construction (2) non-max suppression (and thresholding) 7
8 (1) compute gradient distribution matrix (M) in a local neighbourhood of a point. (2) find points for which both curvature are significant. Corners are stable in arbitrary lighting condition. 8 ) (x, ) (x, ) (x, ) (x, ) ( 2 y 2 x 2 D D y x D y x D I D I I I I I I g M (M) k trace (M) C 2 det 2D Harris-Affine Corner Detector ) ( k
9 Spatio-temporal temporal Harris Corners Q: Interest? high variation in both space and time. => Extend the Harris corner function into 3D spatio-temporal domain. Spatial and temporal Gaussian filtering in the computation of the autocorrelation matrix. 9
10 Spatio-temporal temporal Harris Corners Q: Interest? high variation in both space and time. => Extend the Harris corner function into 3D spatio-temporal domain. Spatial and temporal Gaussian filtering in the computation of the autocorrelation matrix. (1) Compute the Harris saliency map. (2) Points with maximum saliency in a local volume => 3D corners. 10


11 Spatio-temporal temporal Harris Corners Hand clapping Walking 11

12 Why Multi-scale Salient Features? Spatial and temporal scale events require salient features at different spatial and temporal scales. 12
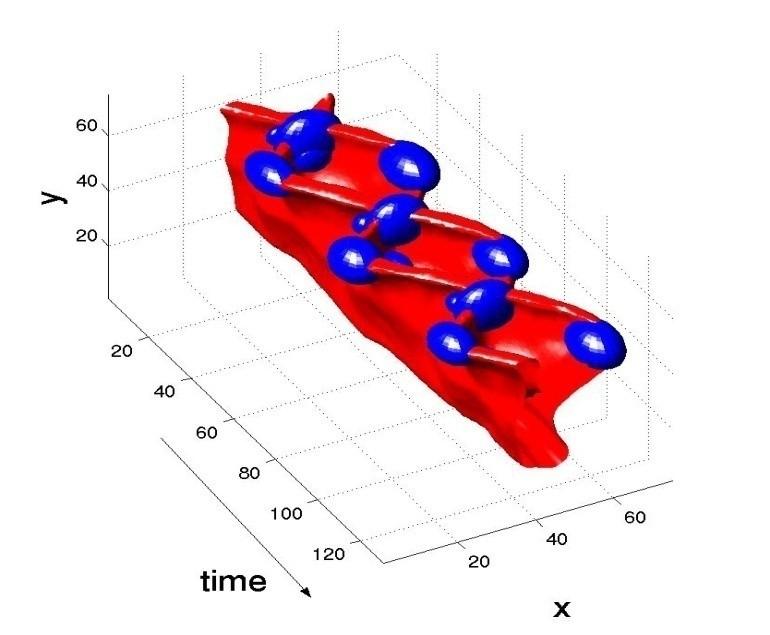
13 Spatio-temporal temporal Hessian Blobs Extension of the Hessian blob detector into 3D spatio-temporal domain: Spatial and temporal Gaussian filtering in the computation of the Hessian matrix. (1) Compute the determinant of Hessian matrix as the saliency map. (2) Points with maximum saliency in a local volume => center of 3D blobs. 13
 Compute the energy of the filter response (2) Points with maximum energy in a local")
14 Cuboids Spatial Gaussian along with temporal Gabor filtering. (1) Compute the energy of the filter response (2) Points with maximum energy in a local volume => center of cuboids. 14
15 Other Spatio-temporal temporal key Points Entropy-based interest points Dense sampling interest points 3D Scale-Invariant Feature Transform Salient opponent-based motion features (our paper in CRV 2010)... 15
16 Spatio-temporal temporal Feature Description So far: For event detection in video, we utilize the salient features. Video filtering at different spatio-temporal scales Key point detection Key point description using the characteristic of the point s surrounding volume. 16

")
 2D SIFT")
17 2 Dimensional Scale-Invariant Feature Transform Gaussians (F) Difference of Gaussian (DoG~LoG) 2D SIFT features Oriented gradients 17

18 3D SIFT Descriptor
19 Other Feature Descriptors 3D SIFT 3D HOG HOG + HOF Local jets,... Histogram of oriented spatial grad. (HOG) Histogram of optical flow (HOF)
20 Summary For video analysis we can study the events characterised by spatiotemporal salient features. Spatial and temporal scale events require salient features at different spatial and temporal scales. Salient feature extraction requires scale-space filtering, interest point detection, and feature description. 20
21 A Challenge: Time Causality Temporal Gaussian/Gabor filter requires both prior and posterior frames. Past Present Future Biological vision promotes causal filtering for the motion perception. Q: how we can address the time causality? A: come to our paper presentation on Wednesday 21
22 References Evaluation of local spatio-temporal features for action recognition, Wang et al., BMCV, 2009 Space time interest points, Laptev and Lindeberg, ICCV Behavior recognition via sparse spatio-temporal filters, Dollar et al., IEEE Workshop VS-PETS, An efficient dense and scale-invariant spatio-temporal interest point detector, Willems et al., ECCV A comparison of affine covariant region detectors, IJCV 2006, Mikolajczyk et al. 22
23 Thank you 23
24 Definition Interest point: Distinctive in a local region rich in local image structure, with its surrounding Repeatable : reproducible under different views Stable to noise, geometric/photometric deformation Has well-defined position in the image space 24
25 Covariant to Scale Change 25

26 Covariant to Scale Change 26




27 Some Requirements Scale change Geometric transformation Corner: significant changes in all directions Photometric transformation 27
28 Salient Features Scale-Invariant feature Transform (SIFT) Harris-affine corner detection Hessian-affine corner detection Edge-based Regions (EBR) Intensity-based Regions (IBR) Maximally Stable Extremal Regions (MSER) Entropy-based salient regions 28
29 Scale- Invariant Feature Transform (SIFT) Scale-space Theorem: a local (3D) maximum of NLoG in (x,y,σ) is a point that can be identified with different size in images ---> it is a scale-invariant keypoint. 29
 I I I 2 x x (x, I y D ) (x, D ) I x I I y 2 y (x, (x, D D ) ) (2) find points for which both curvature are significant.")
30 Harris-Affine Corner Detector (1) compute gradient distribution matrix (M) in a local neighbourhood of a point. M 2 D g( ) I I I 2 x x (x, I y D ) (x, D ) I x I I y 2 y (x, (x, D D ) ) (2) find points for which both curvature are significant. C 2 det (M) k trace (M) 2 k ( ) Corners are stable in arbitrary lighting condition. 30
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
IMPROVING SPATIO-TEMPORAL FEATURE EXTRACTION TECHNIQUES AND THEIR APPLICATIONS IN ACTION CLASSIFICATION. Maral Mesmakhosroshahi, Joohee Kim
 IMPROVING SPATIO-TEMPORAL FEATURE EXTRACTION TECHNIQUES AND THEIR APPLICATIONS IN ACTION CLASSIFICATION Maral Mesmakhosroshahi, Joohee Kim Department of Electrical and Computer Engineering Illinois Institute
IMPROVING SPATIO-TEMPORAL FEATURE EXTRACTION TECHNIQUES AND THEIR APPLICATIONS IN ACTION CLASSIFICATION Maral Mesmakhosroshahi, Joohee Kim Department of Electrical and Computer Engineering Illinois Institute
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions
 Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions Akitsugu Noguchi and Keiji Yanai Department of Computer Science, The University of Electro-Communications, 1-5-1 Chofugaoka,
Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions Akitsugu Noguchi and Keiji Yanai Department of Computer Science, The University of Electro-Communications, 1-5-1 Chofugaoka,
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Evaluation of Local Space-time Descriptors based on Cuboid Detector in Human Action Recognition
 International Journal of Innovation and Applied Studies ISSN 2028-9324 Vol. 9 No. 4 Dec. 2014, pp. 1708-1717 2014 Innovative Space of Scientific Research Journals http://www.ijias.issr-journals.org/ Evaluation
International Journal of Innovation and Applied Studies ISSN 2028-9324 Vol. 9 No. 4 Dec. 2014, pp. 1708-1717 2014 Innovative Space of Scientific Research Journals http://www.ijias.issr-journals.org/ Evaluation
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
EVENT DETECTION AND HUMAN BEHAVIOR RECOGNITION. Ing. Lorenzo Seidenari
 EVENT DETECTION AND HUMAN BEHAVIOR RECOGNITION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it What is an Event? Dictionary.com definition: something that occurs in a certain place during a particular
EVENT DETECTION AND HUMAN BEHAVIOR RECOGNITION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it What is an Event? Dictionary.com definition: something that occurs in a certain place during a particular
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Corner Detection. GV12/3072 Image Processing.
 Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Problems with template matching
 Problems with template matching The template represents the object as we expect to find it in the image The object can indeed be scaled or rotated This technique requires a separate template for each scale
Problems with template matching The template represents the object as we expect to find it in the image The object can indeed be scaled or rotated This technique requires a separate template for each scale
Bag of Optical Flow Volumes for Image Sequence Recognition 1
 RIEMENSCHNEIDER, DONOSER, BISCHOF: BAG OF OPTICAL FLOW VOLUMES 1 Bag of Optical Flow Volumes for Image Sequence Recognition 1 Hayko Riemenschneider http://www.icg.tugraz.at/members/hayko Michael Donoser
RIEMENSCHNEIDER, DONOSER, BISCHOF: BAG OF OPTICAL FLOW VOLUMES 1 Bag of Optical Flow Volumes for Image Sequence Recognition 1 Hayko Riemenschneider http://www.icg.tugraz.at/members/hayko Michael Donoser
CS229: Action Recognition in Tennis
 CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Image Features. Work on project 1. All is Vanity, by C. Allan Gilbert,
 Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
DETECTORS AND DESCRIPTORS FOR PHOTOGRAMMETRIC APPLICATIONS
 DETECTORS AND DESCRIPTORS FOR PHOTOGRAMMETRIC APPLICATIONS KEY WORDS: Features Detection, Orientation, Precision Fabio Remondino Institute for Geodesy and Photogrammetry, ETH Zurich, Switzerland E-mail:
DETECTORS AND DESCRIPTORS FOR PHOTOGRAMMETRIC APPLICATIONS KEY WORDS: Features Detection, Orientation, Precision Fabio Remondino Institute for Geodesy and Photogrammetry, ETH Zurich, Switzerland E-mail:
Video Google: A Text Retrieval Approach to Object Matching in Videos
 Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Velocity adaptation of space-time interest points
 Velocity adaptation of space-time interest points Ivan Laptev and Tony Lindeberg Computational Vision and Active Perception Laboratory (CVAP) Dept. of Numerical Analysis and Computer Science KTH, SE-1
Velocity adaptation of space-time interest points Ivan Laptev and Tony Lindeberg Computational Vision and Active Perception Laboratory (CVAP) Dept. of Numerical Analysis and Computer Science KTH, SE-1
Multi-modal Registration of Visual Data. Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy
 Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
CS 556: Computer Vision. Lecture 3
 CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Interest Points Harris corners Hessian points SIFT Difference-of-Gaussians SURF 2 Properties of Interest Points Locality
CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Interest Points Harris corners Hessian points SIFT Difference-of-Gaussians SURF 2 Properties of Interest Points Locality
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
MoSIFT: Recognizing Human Actions in Surveillance Videos
 MoSIFT: Recognizing Human Actions in Surveillance Videos CMU-CS-09-161 Ming-yu Chen and Alex Hauptmann School of Computer Science Carnegie Mellon University Pittsburgh PA 15213 September 24, 2009 Copyright
MoSIFT: Recognizing Human Actions in Surveillance Videos CMU-CS-09-161 Ming-yu Chen and Alex Hauptmann School of Computer Science Carnegie Mellon University Pittsburgh PA 15213 September 24, 2009 Copyright
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
A Tutorial on VLFeat
 A Tutorial on VLFeat Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 17/04/2014 MATLAB & Computer Vision 2 MATLAB offers
A Tutorial on VLFeat Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 17/04/2014 MATLAB & Computer Vision 2 MATLAB offers
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Scale Invariant Feature Transform by David Lowe
 Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Chapter 2 Action Representation
 Chapter 2 Action Representation Abstract In this chapter, various action recognition issues are covered in a concise manner. Various approaches are presented here. In Chap. 1, nomenclatures, various aspects
Chapter 2 Action Representation Abstract In this chapter, various action recognition issues are covered in a concise manner. Various approaches are presented here. In Chap. 1, nomenclatures, various aspects
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
ECE Digital Image Processing and Introduction to Computer Vision
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Recap, SIFT Motion Tracking Change Detection Feature
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Recap, SIFT Motion Tracking Change Detection Feature
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4
, Module 4") Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
Lecture 18: Human Motion Recognition
 Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM INTRODUCTION
 A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
Structure Guided Salient Region Detector
 Structure Guided Salient Region Detector Shufei Fan, Frank Ferrie Center for Intelligent Machines McGill University Montréal H3A2A7, Canada Abstract This paper presents a novel method for detection of
Structure Guided Salient Region Detector Shufei Fan, Frank Ferrie Center for Intelligent Machines McGill University Montréal H3A2A7, Canada Abstract This paper presents a novel method for detection of
CS 556: Computer Vision. Lecture 3
 CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Outline Matlab Image features -- Interest points Point descriptors Homework 1 2 Basic MATLAB Commands 3 Basic MATLAB
CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Outline Matlab Image features -- Interest points Point descriptors Homework 1 2 Basic MATLAB Commands 3 Basic MATLAB
Image Matching. AKA: Image registration, the correspondence problem, Tracking,
 Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
A Probabilistic Framework for Recognizing Similar Actions using Spatio-Temporal Features
 A Probabilistic Framework for Recognizing Similar Actions using Spatio-Temporal Features Alonso Patron-Perez, Ian Reid Department of Engineering Science, University of Oxford OX1 3PJ, Oxford, UK {alonso,ian}@robots.ox.ac.uk
A Probabilistic Framework for Recognizing Similar Actions using Spatio-Temporal Features Alonso Patron-Perez, Ian Reid Department of Engineering Science, University of Oxford OX1 3PJ, Oxford, UK {alonso,ian}@robots.ox.ac.uk
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
Evaluation of local descriptors for action recognition in videos
 Evaluation of local descriptors for action recognition in videos Piotr Bilinski and Francois Bremond INRIA Sophia Antipolis - PULSAR group 2004 route des Lucioles - BP 93 06902 Sophia Antipolis Cedex,
Evaluation of local descriptors for action recognition in videos Piotr Bilinski and Francois Bremond INRIA Sophia Antipolis - PULSAR group 2004 route des Lucioles - BP 93 06902 Sophia Antipolis Cedex,
Lecture: RANSAC and feature detectors
 Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Action Recognition & Categories via Spatial-Temporal Features
 Action Recognition & Categories via Spatial-Temporal Features 华俊豪, 11331007 huajh7@gmail.com 2014/4/9 Talk at Image & Video Analysis taught by Huimin Yu. Outline Introduction Frameworks Feature extraction
Action Recognition & Categories via Spatial-Temporal Features 华俊豪, 11331007 huajh7@gmail.com 2014/4/9 Talk at Image & Video Analysis taught by Huimin Yu. Outline Introduction Frameworks Feature extraction
Requirements for region detection
 Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
3D Vision. Viktor Larsson. Spring 2019
 3D Vision Viktor Larsson Spring 2019 Schedule Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar 25 Apr 1 Apr 8 Apr 15 Apr 22 Apr 29 May 6 May 13 May 20 May 27 Introduction Geometry, Camera Model, Calibration Features,
3D Vision Viktor Larsson Spring 2019 Schedule Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar 25 Apr 1 Apr 8 Apr 15 Apr 22 Apr 29 May 6 May 13 May 20 May 27 Introduction Geometry, Camera Model, Calibration Features,
Discriminant Interest Points are Stable
 Appears in IEEE Conf. on Computer Vision and Pattern Recognition, Minneapolis, 27. Discriminant Interest Points are Stable Dashan Gao Nuno Vasconcelos Department of Electrical and Computer Engineering
Appears in IEEE Conf. on Computer Vision and Pattern Recognition, Minneapolis, 27. Discriminant Interest Points are Stable Dashan Gao Nuno Vasconcelos Department of Electrical and Computer Engineering
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Click to edit title style
 Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Action Recognition using Randomised Ferns
 Action Recognition using Randomised Ferns Olusegun Oshin Andrew Gilbert John Illingworth Richard Bowden Centre for Vision, Speech and Signal Processing, University of Surrey Guildford, Surrey United Kingdom
Action Recognition using Randomised Ferns Olusegun Oshin Andrew Gilbert John Illingworth Richard Bowden Centre for Vision, Speech and Signal Processing, University of Surrey Guildford, Surrey United Kingdom
Lecture 4.1 Feature descriptors. Trym Vegard Haavardsholm
 Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
Comparison of Local Feature Descriptors
 Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Image matching. Announcements. Harder case. Even harder case. Project 1 Out today Help session at the end of class. by Diva Sian.
 Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Lecture 6: Finding Features (part 1/2)
") Lecture 6: Finding Features (part 1/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Stanford Vision Lab 1 What we will learn today? Local invariant features MoOvaOon Requirements, invariances Keypoint
Lecture 6: Finding Features (part 1/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Stanford Vision Lab 1 What we will learn today? Local invariant features MoOvaOon Requirements, invariances Keypoint
Wikipedia - Mysid
 Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Today. Main questions 10/30/2008. Bag of words models. Last time: Local invariant features. Harris corner detector: rotation invariant detection
 Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
FESID: Finite Element Scale Invariant Detector
 : Finite Element Scale Invariant Detector Dermot Kerr 1,SonyaColeman 1, and Bryan Scotney 2 1 School of Computing and Intelligent Systems, University of Ulster, Magee, BT48 7JL, Northern Ireland 2 School
: Finite Element Scale Invariant Detector Dermot Kerr 1,SonyaColeman 1, and Bryan Scotney 2 1 School of Computing and Intelligent Systems, University of Ulster, Magee, BT48 7JL, Northern Ireland 2 School
CS231A Section 6: Problem Set 3
 CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
Learning realistic human actions from movies
 Learning realistic human actions from movies Ivan Laptev, Marcin Marszalek, Cordelia Schmid, Benjamin Rozenfeld CVPR 2008 Presented by Piotr Mirowski Courant Institute, NYU Advanced Vision class, November
Learning realistic human actions from movies Ivan Laptev, Marcin Marszalek, Cordelia Schmid, Benjamin Rozenfeld CVPR 2008 Presented by Piotr Mirowski Courant Institute, NYU Advanced Vision class, November
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Evaluation of local spatio-temporal features for action recognition
 Evaluation of local spatio-temporal features for action recognition Heng Wang, Muhammad Muneeb Ullah, Alexander Klaser, Ivan Laptev, Cordelia Schmid To cite this version: Heng Wang, Muhammad Muneeb Ullah,
Evaluation of local spatio-temporal features for action recognition Heng Wang, Muhammad Muneeb Ullah, Alexander Klaser, Ivan Laptev, Cordelia Schmid To cite this version: Heng Wang, Muhammad Muneeb Ullah,
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Image Segmentation and Registration
 Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Computer Vision I - Basics of Image Processing Part 2
 Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching
 Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?