CS 763 F16. Moving objects in space with obstacles/constraints.
|
|
|
- Cynthia Wilkerson
- 5 years ago
- Views:
Transcription

,")
,")




 -")
1 Moving objects in space with obstacles/constraints. Objects = robots, vehicles, jointed linkages (robot arm), tools (e.g. on automated assembly line), foldable/bendable objects. Objects need not be physical (e.g. fly-through animation). We will concentrate on moving from one position to another, though visiting a sequence of positions is also very interesting. Outline: - translational motion (one rigid object) - with rotations - linkage motion (robot arm)
2 Translational motion a polygon translating among polygonal obstacles. Start with a point moving among polygonal obstacles. Then we can use the shortest path algorithm from previous lecture. But we do not really need the shortest path
3 How to find if there is some path from point s to point t among polygonal obstacles. the blue graph is called a roadmap - construct trapezoidal map of space outside obstacles - construct dual graph = the roadmap vertex = trapezoid; edge = two trapezoids share a boundary - let T(s) = trapezoid containing s; T(t) = trapezoid containing t - there is a path s > t iff T(s) and T(t) are connected in the roadmap graph - time O(n log n)
4 An alternative roadmap: the Voronoi diagram of the obstacles. Voronoi Diagrams: Planning Find the point q* of the Voronoi Then, for a given route, the point stays as far as possible from the obstacles

5 A disc moving among polygonal obstacles. Model as a point (the center of the disc) moving among enlarged obstacles. disc radius = r the center of the disc must stay distance r from the obstacles the disc cannot follow this path O Rourke Enlarging the obstacles is captured more formally via Minkowski sum, A B

6 Minkowski sum

7 A polygon moving among polygons by translation only. R = moving polygon P = an obstacle polygon Replace R by a reference point at the origin. Enlarge P to compensate we need where can the reference point be when R touches P?
8 Can polygon R move (via translations) from initial to final position among polygonal obstacles? high level idea - compute the Minkowski sum P ( R) for each obstacle P - take the union, to obtain new polygonal obstacles - test if a point (the reference point) can move from initial to final position among the new enlarged obstacles
9 Theorem. If P and R are convex polygons with n and m edges, respectively, then P R has at most n+m edges and can be found in O(n+m) time. intuition for the proof: as we slide R around P, tracing the path of the reference point in R, each vertex of P and each vertex of R cause a vertex in the path
 complexity. Figure 82: Minkowski sum of O(n 2 m 2 ) complexity. - 467 -")
10 Complexity of Minkowski sum R P R and P convex O(n+m) R convex, P non-convex O(nm) R, P non-convex O(n 2 m 2 ) These bounds are tight: R, P non-convex R convex, P non-convex Figure 83: Minkowski sum of O(nm) complexity. Figure 82: Minkowski sum of O(n 2 m 2 ) complexity
11 Computing the union of the enlarged polygons. Complexity of the union is reduced due to the following: two convex polygons boundaries can intersect many times they form pseudodiscs if their boundaries intersect at most twice Note: need a more careful definition in case of shared boundary segments Theorem 1: Let P1 and P2 be disjoint convex polygons. Then P1 R and P2 R form pseudodiscs. Theorem 2: If Q1... Qk are pairwise pseudodiscs of total size n then their union has size O(n)
12
13
14 Putting it all together: To move polygon R of constant size among polygonal obstacles of total size n. If an obstacle is non-convex, triangulate to get convex pieces (total size is still O(n)). Forbidden space = union of enlarged convex polygons = Free space = complement of forbidden space. Forbidden space has size (number of vertices) O(n) by Theorems 1 and 2. The forbidden space can be computed in O(n log n) time. (or via simpler O(n log 2 n) time divide and conquer algorithm)
15 Translational motion planning in higher dimensions in 2D O(n log n) by above method in 3D O(n^2 log^2 n) by similar method (for convex robot) general road map algorithm of Canny O(n^d log n) where d is the number of degrees of freedom this applies to rotational motion as well
 moving among polygonal obstacles in the plane.")
 where (x,y) is the position of")
16 Motion planning with rotations. Consider a line segment ( ladder ) moving among polygonal obstacles in the plane. There are 3 degrees of freedom. Choose an endpoint of the ladder as a reference point. The position of the ladder is specified by (x, y, θ) where (x,y) is the position of the reference point, and θ is the rotation angle

17 a ladder moving among 3 rectangular obstacles configuration space θ=0 configuration space θ=30 configuration space θ=60 figures from Devadoss & O Rourke

18 configuration space in 3D (3rd dimension is θ) The 3D configuration space has curved boundaries and is hard to deal with
19 Roadmap technique using cell decomposition

20 For fixed θ, use previous technique to find configuration space. Divide into equivalence regions: two positions of the ladder are equivalent if moving the ladder parallel to itself, it hits the same two obstacles

21 Now increase θ. The combinatorics of the regions changes only at critical angles in the direction through two vertices. There are O(n^2) critical directions
 time. - 479 -")
22 Best algorithm takes O(n^2) time
 The study of linkage")
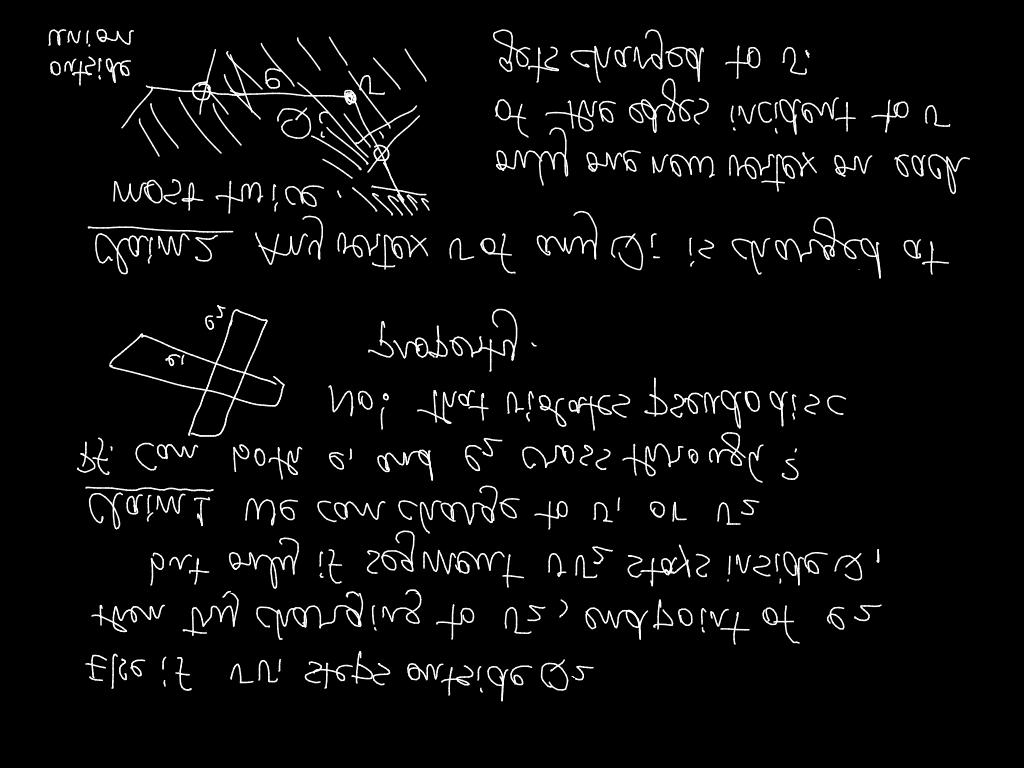
23 Robot Arm Motion (Linkages) The study of linkages is old, e.g. Peaucellier linkage to convert rotary motion to linear motion We will just look at a chain (not a general graph) a polygonal chain where the segments ( links ) have fixed lengths and the angles between successive links may change. Two models: as P moves on a circle, Q moves on a line - intersection of links allowed, e.g. above, where linkage is essentially planar, but each link is slightly higher (in 3rd dimension) than previous - intersections forbidden. e.g. protein folding, robot arm in 3D

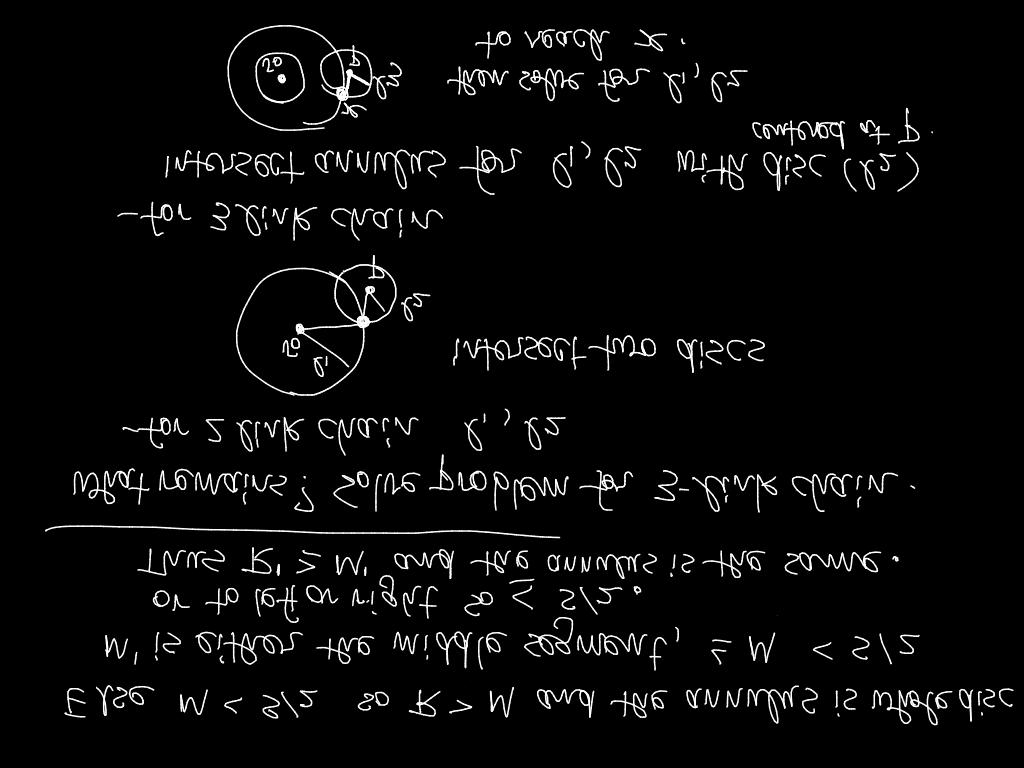
24 We will study two problems: 1. Given a chain with one endpoint fixed, where can the other endpoint reach? Allow intersections. 2. Given a chain, can we go from any configuration to any other? Forbid intersections. different views not to scale

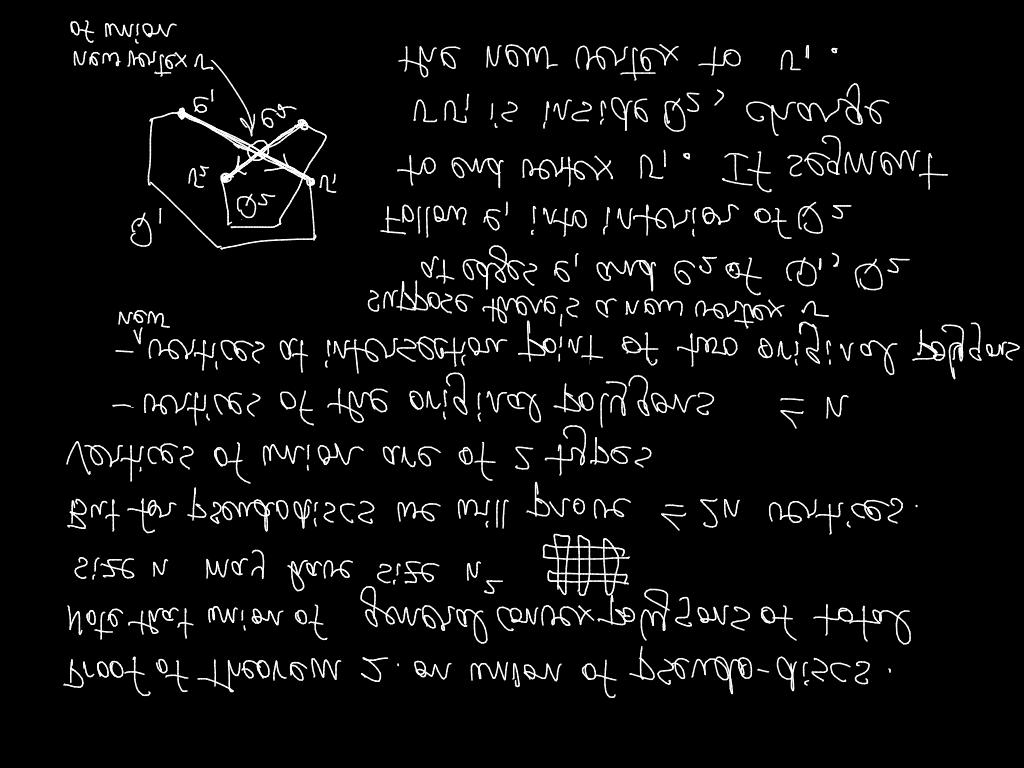
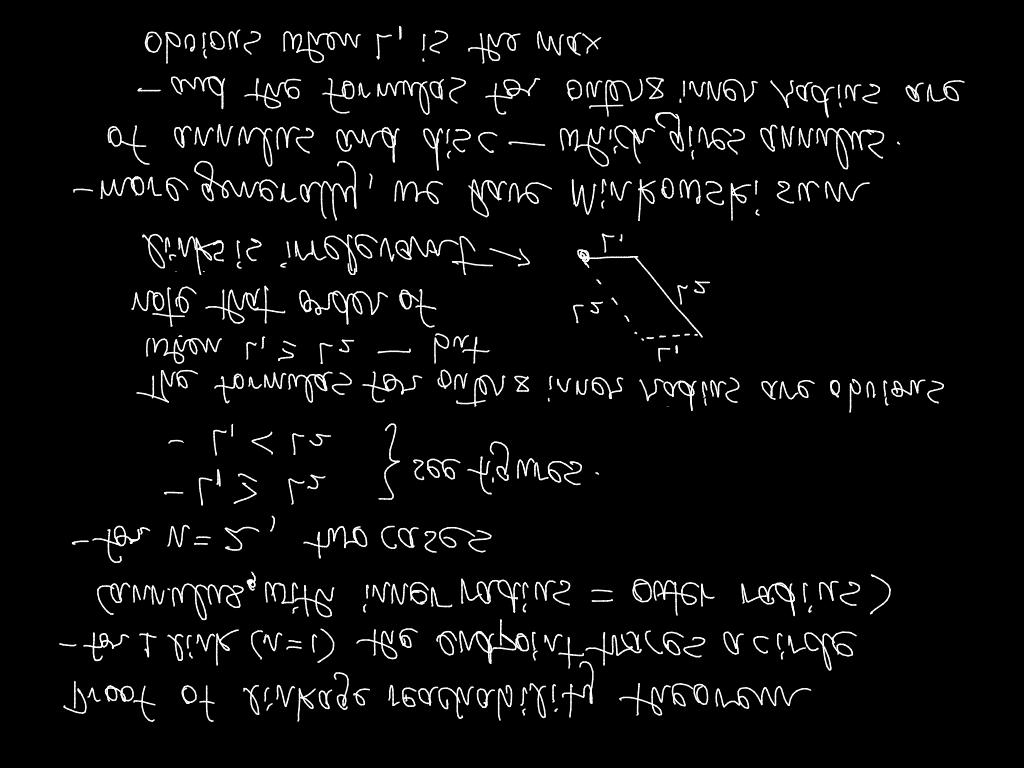
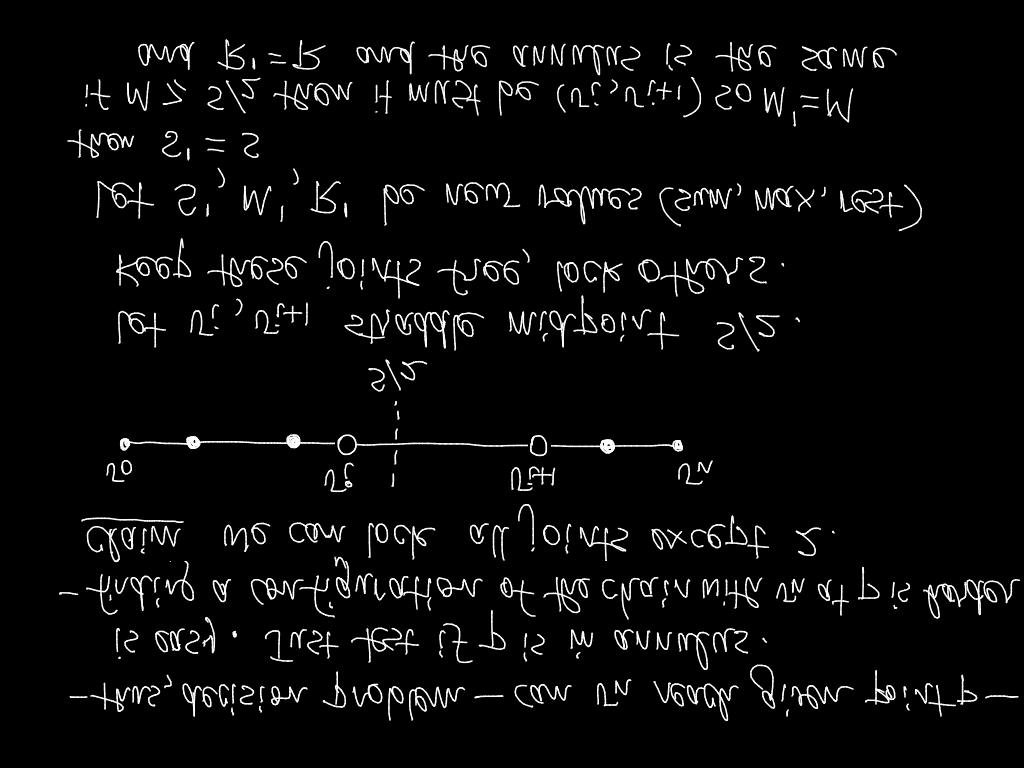
25 Theorem. outer radius = inner radius = John Hopcroft, Deborah Joseph, and Sue Whitesides. "On the movement of robot arms in 2-dimensional bounded regions."

26 reachability of a chain of links 2 links Minkowski sum of annulus and disc
27
28
29

30 2. Given a linkage, can we go from any configuration to any other? Forbid intersections. Erik Demaine In 3D, the answer is not always. Biedl, T., Demaine, E., Demaine, M., Lazard, S., Lubiw, A., O'Rourke, J., Overmars, M., Robbins, S., Streinu, I., Toussaint, G. and Whitesides, S., Locked and unlocked polygonal chains in three dimensions Fig. 1. A locked, open chain K with long knitting needles at the ends. OPEN. Can a chain of unit length links be locked? OPEN. Find a polynomial time algorithm to test if a 3D polygonal chain is locked. (It is PSPACE-hard to test if we can get from one configuration to another.)


")


31 Theorem. In 2D, any chain can be straightened. Any closed chain can be made convex. Robert Connelly, Erik D. Demaine, and Günter Rote. "Straightening Polygonal Arcs and Convexifying Polygonal Cycles." 2003 (Erik Demain s PhD thesis work) This implies that a linkage can go from any configuration to any other. initial config. straight config. final config. idea of proof: they show that it suffices to use expansive motions the distance between any two vertices never decreases
32 A better way to go from initial to final configuration avoid going through intermediate straight/convex chain. Hayley Iben, James F. O Brien, and Erik D. Demaine. "Refolding planar polygons." Fig. 2 The top row demonstrates how using the vertex-position metric alone will, as expected, generate a sequence with self intersections. The bottom row illustrates how the collision-avoidance machinery alters the vertex motions to avoid self intersection. Computation times were less than one second
Motion Planning. O Rourke, Chapter 8
 O Rourke, Chapter 8 Outline Translating a polygon Moving a ladder Shortest Path (Point-to-Point) Goal: Given disjoint polygons in the plane, and given positions s and t, find the shortest path from s to
O Rourke, Chapter 8 Outline Translating a polygon Moving a ladder Shortest Path (Point-to-Point) Goal: Given disjoint polygons in the plane, and given positions s and t, find the shortest path from s to
Motion Planning. Thanks to Piotr Indyk. Lecture 11: Motion Planning
 Motion Planning Thanks to Piotr Indyk Piano Mover s Problem Given: A set of obstacles The initial position of a robot The final position of a robot Goal: find a path that Moves the robot from the initial
Motion Planning Thanks to Piotr Indyk Piano Mover s Problem Given: A set of obstacles The initial position of a robot The final position of a robot Goal: find a path that Moves the robot from the initial
On Unfolding Lattice Polygons/Trees and Diameter-4 Trees
 On Unfolding Lattice Polygons/Trees and Diameter-4 Trees Sheung-Hung Poon Department of Mathematics and Computer Science, TU Eindhoven, 5600 MB, Eindhoven, the Netherlands. spoon@win.tue.nl Abstract. We
On Unfolding Lattice Polygons/Trees and Diameter-4 Trees Sheung-Hung Poon Department of Mathematics and Computer Science, TU Eindhoven, 5600 MB, Eindhoven, the Netherlands. spoon@win.tue.nl Abstract. We
Planar Minimally Rigid Graphs and Pseudotriangulations. November 21, 2003
 Planar Minimally Rigid Graphs and Pseudotriangulations November 21, 2003 0 Planar Minimally Rigid Graphs and Pseudotriangulations I. Rigid Graphs. II. Robot Arms III. Pseudotriangles IV. Relationships
Planar Minimally Rigid Graphs and Pseudotriangulations November 21, 2003 0 Planar Minimally Rigid Graphs and Pseudotriangulations I. Rigid Graphs. II. Robot Arms III. Pseudotriangles IV. Relationships
Graphs, Trees. Pebbles, Robots
 Graphs, Trees Pebbles, Robots 1 Outline I. Robot Arms. II. Rigid Graphs. III. Characterizations of minimally rigid graphs. IV. Trees, Arboricity and Characterizations. V. The Pebbling Algorithm. VI. Applications:
Graphs, Trees Pebbles, Robots 1 Outline I. Robot Arms. II. Rigid Graphs. III. Characterizations of minimally rigid graphs. IV. Trees, Arboricity and Characterizations. V. The Pebbling Algorithm. VI. Applications:
On Unfolding Trees and Polygons on Various Lattices
 On Unfolding Trees and Polygons on Various Lattices Author: Sheung-Hung Poon, Presented by: Elena Mumford Technical University of Eindhoven (TU/e), The Netherlands The 19th Canadian Conference on Computational
On Unfolding Trees and Polygons on Various Lattices Author: Sheung-Hung Poon, Presented by: Elena Mumford Technical University of Eindhoven (TU/e), The Netherlands The 19th Canadian Conference on Computational
Computational Geometry csci3250. Laura Toma. Bowdoin College
 Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Lecture 11 Combinatorial Planning: In the Plane
 CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
C i 2i. 4i 1. true side false side
 On the Complexity of the Linkage Reconfiguration Problem Helmut Alt, Christian Knauer, Günter Rote, Sue Whitesides B 03-02 January 2003 On the Complexity of the Linkage Reconfiguration Problem Helmut Alt
On the Complexity of the Linkage Reconfiguration Problem Helmut Alt, Christian Knauer, Günter Rote, Sue Whitesides B 03-02 January 2003 On the Complexity of the Linkage Reconfiguration Problem Helmut Alt
Locked and Unlocked Chains of Planar Shapes
 Locked and Unlocked Chains of Planar Shapes Robert Connelly Erik D. Demaine Martin L. Demaine Sándor Fekete Stefan Langerman Joseph S. B. Mitchell Ares Ribó Günter Rote August 3, 2004 Dedicated to Godfried
Locked and Unlocked Chains of Planar Shapes Robert Connelly Erik D. Demaine Martin L. Demaine Sándor Fekete Stefan Langerman Joseph S. B. Mitchell Ares Ribó Günter Rote August 3, 2004 Dedicated to Godfried
Week 8 Voronoi Diagrams
 1 Week 8 Voronoi Diagrams 2 Voronoi Diagram Very important problem in Comp. Geo. Discussed back in 1850 by Dirichlet Published in a paper by Voronoi in 1908 3 Voronoi Diagram Fire observation towers: an
1 Week 8 Voronoi Diagrams 2 Voronoi Diagram Very important problem in Comp. Geo. Discussed back in 1850 by Dirichlet Published in a paper by Voronoi in 1908 3 Voronoi Diagram Fire observation towers: an
Computational Geometry
 More on Voronoi diagrams 1 Can we move a disc from one location to another amidst obstacles? 2 Since the Voronoi diagram of point sites is locally furthest away from those sites, we can move the disc if
More on Voronoi diagrams 1 Can we move a disc from one location to another amidst obstacles? 2 Since the Voronoi diagram of point sites is locally furthest away from those sites, we can move the disc if
Single-Vertex Origami and Spherical Expansive Motions
 Single-Vertex Origami and Spherical Expansive Motions Ileana Streinu 1 and Walter Whiteley 2 1 Computer Science Department, Smith College, Northampton, MA 01063, USA. streinu@cs.smith.edu, http://cs.smith.edu/~streinu
Single-Vertex Origami and Spherical Expansive Motions Ileana Streinu 1 and Walter Whiteley 2 1 Computer Science Department, Smith College, Northampton, MA 01063, USA. streinu@cs.smith.edu, http://cs.smith.edu/~streinu
Collision Detection CS434. Daniel G. Aliaga Department of Computer Science Purdue University
 Collision Detection CS434 Daniel G. Aliaga Department of Computer Science Purdue University Some Applications Animations/games Robotic planning Haptics Some collision detection approaches Minkowski Sum
Collision Detection CS434 Daniel G. Aliaga Department of Computer Science Purdue University Some Applications Animations/games Robotic planning Haptics Some collision detection approaches Minkowski Sum
Reachability on a region bounded by two attached squares
 Reachability on a region bounded by two attached squares Ali Mohades mohades@cic.aku.ac.ir AmirKabir University of Tech., Math. and Computer Sc. Dept. Mohammadreza Razzazi razzazi@ce.aku.ac.ir AmirKabir
Reachability on a region bounded by two attached squares Ali Mohades mohades@cic.aku.ac.ir AmirKabir University of Tech., Math. and Computer Sc. Dept. Mohammadreza Razzazi razzazi@ce.aku.ac.ir AmirKabir
arxiv:cs.cg/ v1 20 Oct 2004
 A 2-CHAIN CAN INTERLOCK WITH A k-chain JULIE GLASS, STEFAN LANGERMAN, JOSEPH O ROURKE, JACK SNOEYINK, AND JIANYUAN K. ZHONG arxiv:cs.cg/0410052 v1 20 Oct 2004 Abstract. One of the open problems posed in
A 2-CHAIN CAN INTERLOCK WITH A k-chain JULIE GLASS, STEFAN LANGERMAN, JOSEPH O ROURKE, JACK SNOEYINK, AND JIANYUAN K. ZHONG arxiv:cs.cg/0410052 v1 20 Oct 2004 Abstract. One of the open problems posed in
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Divided-and-Conquer for Voronoi Diagrams Revisited. Supervisor: Ben Galehouse Presenter: Xiaoqi Cao
 Divided-and-Conquer for Voronoi Diagrams Revisited Supervisor: Ben Galehouse Presenter: Xiaoqi Cao Outline Introduction Generalized Voronoi Diagram Algorithm for building generalized Voronoi Diagram Applications
Divided-and-Conquer for Voronoi Diagrams Revisited Supervisor: Ben Galehouse Presenter: Xiaoqi Cao Outline Introduction Generalized Voronoi Diagram Algorithm for building generalized Voronoi Diagram Applications
An Energy-Driven Approach to Linkage Unfolding
 An Energy-Driven Approach to Linkage Unfolding Jason H. Cantarella Erik D. Demaine Hayley N. Iben James F. O Brien Abstract We present a new algorithm for unfolding planar polygonal linkages without self-intersection
An Energy-Driven Approach to Linkage Unfolding Jason H. Cantarella Erik D. Demaine Hayley N. Iben James F. O Brien Abstract We present a new algorithm for unfolding planar polygonal linkages without self-intersection
arxiv: v1 [cs.cg] 11 Sep 2007
![arxiv: v1 [cs.cg] 11 Sep 2007](/thumbs/77/74677208.jpg "arxiv: v1 [cs.cg] 11 Sep 2007") Unfolding Restricted Convex Caps Joseph O Rourke arxiv:0709.1647v1 [cs.cg] 11 Sep 2007 September 11, 2007 Abstract This paper details an algorithm for unfolding a class of convex polyhedra, where each
Unfolding Restricted Convex Caps Joseph O Rourke arxiv:0709.1647v1 [cs.cg] 11 Sep 2007 September 11, 2007 Abstract This paper details an algorithm for unfolding a class of convex polyhedra, where each
Straight Line motion with rigid sets
 Straight ine motion with rigid sets arxiv:40.4743v [math.mg] 9 Jan 04 Robert Connelly and uis Montejano January 7, 08 Abstract If one is given a rigid triangle in the plane or space, we show that the only
Straight ine motion with rigid sets arxiv:40.4743v [math.mg] 9 Jan 04 Robert Connelly and uis Montejano January 7, 08 Abstract If one is given a rigid triangle in the plane or space, we show that the only
Minkowski Sums. Dinesh Manocha Gokul Varadhan. UNC Chapel Hill. NUS CS 5247 David Hsu
 Minkowski Sums Dinesh Manocha Gokul Varadhan UNC Chapel Hill NUS CS 5247 David Hsu Last Lecture Configuration space workspace configuration space 2 Problem Configuration Space of a Translating Robot Input:
Minkowski Sums Dinesh Manocha Gokul Varadhan UNC Chapel Hill NUS CS 5247 David Hsu Last Lecture Configuration space workspace configuration space 2 Problem Configuration Space of a Translating Robot Input:
Road Map Methods. Including material from Howie Choset / G.D. Hager S. Leonard
 Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Motion Planning 2D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning in Eight Directions
 Robot Motion Planning in Eight Directions Miloš Šeda and Tomáš Březina Abstract In this paper, we investigate the problem of 8-directional robot motion planning where the goal is to find a collision-free
Robot Motion Planning in Eight Directions Miloš Šeda and Tomáš Březina Abstract In this paper, we investigate the problem of 8-directional robot motion planning where the goal is to find a collision-free
CS 532: 3D Computer Vision 14 th Set of Notes
 1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
Refolding Planar Polygons. Copyright Spring by Hayley Nicole Iben
 Refolding Planar Polygons Copyright Spring 2005 by Hayley Nicole Iben i Abstract Refolding Planar Polygons by Hayley Nicole Iben Master of Science in Computer Science University of California at Berkeley
Refolding Planar Polygons Copyright Spring 2005 by Hayley Nicole Iben i Abstract Refolding Planar Polygons by Hayley Nicole Iben Master of Science in Computer Science University of California at Berkeley
Minimal locked trees. Citation. As Published Publisher. Version
 Minimal locked trees The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher Ballinger, Brad et al. Minimal
Minimal locked trees The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher Ballinger, Brad et al. Minimal
Week 7 Convex Hulls in 3D
 1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
arxiv:cs.cg/ v4 3 Aug 2006
 On the Development of the Intersection of a Plane with a Polytope Joseph O Rourke arxiv:cs.cg/0006035 v4 3 Aug 2006 Abstract Define a slice curve as the intersection of a plane with the surface of a polytope,
On the Development of the Intersection of a Plane with a Polytope Joseph O Rourke arxiv:cs.cg/0006035 v4 3 Aug 2006 Abstract Define a slice curve as the intersection of a plane with the surface of a polytope,
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
Planar Graphs. 1 Graphs and maps. 1.1 Planarity and duality
 Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Robot Motion Planning Using Generalised Voronoi Diagrams
 Robot Motion Planning Using Generalised Voronoi Diagrams MILOŠ ŠEDA, VÁCLAV PICH Institute of Automation and Computer Science Brno University of Technology Technická 2, 616 69 Brno CZECH REPUBLIC Abstract:
Robot Motion Planning Using Generalised Voronoi Diagrams MILOŠ ŠEDA, VÁCLAV PICH Institute of Automation and Computer Science Brno University of Technology Technická 2, 616 69 Brno CZECH REPUBLIC Abstract:
When can a net fold to a polyhedron?
 Computational Geometry 31 (2005) 207 218 www.elsevier.com/locate/comgeo When can a net fold to a polyhedron? Therese Biedl, Anna Lubiw, Julie Sun School of Computer Science, University of Waterloo, Waterloo,
Computational Geometry 31 (2005) 207 218 www.elsevier.com/locate/comgeo When can a net fold to a polyhedron? Therese Biedl, Anna Lubiw, Julie Sun School of Computer Science, University of Waterloo, Waterloo,
Pebbles, Trees and Rigid Graphs. May, 2005
 Pebbles, Trees and Rigid Graphs May, 2005 0 Rigidity of Graphs Construct the graph G in 2 using inflexible bars for the edges and rotatable joints for the vertices. This immersion is rigid if the only
Pebbles, Trees and Rigid Graphs May, 2005 0 Rigidity of Graphs Construct the graph G in 2 using inflexible bars for the edges and rotatable joints for the vertices. This immersion is rigid if the only
Henneberg construction
 Henneberg construction Seminar über Algorithmen FU-Berlin, WS 2007/08 Andrei Haralevich Abstract: In this work will be explained two different types of steps of Henneberg construction. And how Henneberg
Henneberg construction Seminar über Algorithmen FU-Berlin, WS 2007/08 Andrei Haralevich Abstract: In this work will be explained two different types of steps of Henneberg construction. And how Henneberg
Acute Triangulations of Polygons
 Europ. J. Combinatorics (2002) 23, 45 55 doi:10.1006/eujc.2001.0531 Available online at http://www.idealibrary.com on Acute Triangulations of Polygons H. MAEHARA We prove that every n-gon can be triangulated
Europ. J. Combinatorics (2002) 23, 45 55 doi:10.1006/eujc.2001.0531 Available online at http://www.idealibrary.com on Acute Triangulations of Polygons H. MAEHARA We prove that every n-gon can be triangulated
Computational Geometry
 Lecture 12: Lecture 12: Motivation: Terrains by interpolation To build a model of the terrain surface, we can start with a number of sample points where we know the height. Lecture 12: Motivation: Terrains
Lecture 12: Lecture 12: Motivation: Terrains by interpolation To build a model of the terrain surface, we can start with a number of sample points where we know the height. Lecture 12: Motivation: Terrains
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Voronoi Diagrams in the Plane. Chapter 5 of O Rourke text Chapter 7 and 9 of course text
 Voronoi Diagrams in the Plane Chapter 5 of O Rourke text Chapter 7 and 9 of course text Voronoi Diagrams As important as convex hulls Captures the neighborhood (proximity) information of geometric objects
Voronoi Diagrams in the Plane Chapter 5 of O Rourke text Chapter 7 and 9 of course text Voronoi Diagrams As important as convex hulls Captures the neighborhood (proximity) information of geometric objects
How Do Computers Solve Geometric Problems? Sorelle Friedler, University of Maryland - College Park
 How Do Computers Solve Geometric Problems? Sorelle Friedler, University of Maryland - College Park http://www.cs.umd.edu/~sorelle Outline Introduction Algorithms Computational Geometry Art Museum Problem
How Do Computers Solve Geometric Problems? Sorelle Friedler, University of Maryland - College Park http://www.cs.umd.edu/~sorelle Outline Introduction Algorithms Computational Geometry Art Museum Problem
Unit 5: Part 1 Planning
 Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
arxiv: v4 [cs.cg] 12 Jul 2007
![arxiv: v4 [cs.cg] 12 Jul 2007](/thumbs/83/88426851.jpg "arxiv: v4 [cs.cg] 12 Jul 2007") Unfolding Orthogonal Terrains Joseph O Rourke arxiv:0707.060v4 [cs.cg] Jul 007 Jul, 007 Abstract It is shown that ever orthogonal terrain, i.e., an orthogonal (rightangled) polhedron based on a rectangle
Unfolding Orthogonal Terrains Joseph O Rourke arxiv:0707.060v4 [cs.cg] Jul 007 Jul, 007 Abstract It is shown that ever orthogonal terrain, i.e., an orthogonal (rightangled) polhedron based on a rectangle
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Line segment intersection. Family of intersection problems
 CG Lecture 2 Line segment intersection Intersecting two line segments Line sweep algorithm Convex polygon intersection Boolean operations on polygons Subdivision overlay algorithm 1 Family of intersection
CG Lecture 2 Line segment intersection Intersecting two line segments Line sweep algorithm Convex polygon intersection Boolean operations on polygons Subdivision overlay algorithm 1 Family of intersection
Course Number: Course Title: Geometry
 Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Computational Geometry: Theory and Applications. Morphing polyhedra with parallel faces: Counterexamples
 Computational Geometry 42 (2009) 395 402 Contents lists available at ScienceDirect Computational Geometry: Theory and Applications www.elsevier.com/locate/comgeo Morphing polyhedra with parallel faces:
Computational Geometry 42 (2009) 395 402 Contents lists available at ScienceDirect Computational Geometry: Theory and Applications www.elsevier.com/locate/comgeo Morphing polyhedra with parallel faces:
The Touring Polygons Problem (TPP)
") The Touring Polygons Problem (TPP) [Dror-Efrat-Lubiw-M]: Given a sequence of k polygons in the plane, a start point s, and a target point, t, we seek a shortest path that starts at s, visits in order each
The Touring Polygons Problem (TPP) [Dror-Efrat-Lubiw-M]: Given a sequence of k polygons in the plane, a start point s, and a target point, t, we seek a shortest path that starts at s, visits in order each
References. Additional lecture notes for 2/18/02.
 References Additional lecture notes for 2/18/02. I-COLLIDE: Interactive and Exact Collision Detection for Large-Scale Environments, by Cohen, Lin, Manocha & Ponamgi, Proc. of ACM Symposium on Interactive
References Additional lecture notes for 2/18/02. I-COLLIDE: Interactive and Exact Collision Detection for Large-Scale Environments, by Cohen, Lin, Manocha & Ponamgi, Proc. of ACM Symposium on Interactive
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
Lecture 3. Planar Kinematics
 Matthew T. Mason Mechanics of Manipulation Outline Where are we? s 1. Foundations and general concepts. 2.. 3. Spherical and spatial kinematics. Readings etc. The text: By now you should have read Chapter
Matthew T. Mason Mechanics of Manipulation Outline Where are we? s 1. Foundations and general concepts. 2.. 3. Spherical and spatial kinematics. Readings etc. The text: By now you should have read Chapter
MISCELLANEOUS SHAPES
 MISCELLANEOUS SHAPES 4.1. INTRODUCTION Five generic shapes of polygons have been usefully distinguished in the literature: convex, orthogonal, star, spiral, and monotone. 1 Convex polygons obviously do
MISCELLANEOUS SHAPES 4.1. INTRODUCTION Five generic shapes of polygons have been usefully distinguished in the literature: convex, orthogonal, star, spiral, and monotone. 1 Convex polygons obviously do
Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here)
") Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here) Voronoi Diagram & Delaunay Triangualtion Algorithms Divide-&-Conquer Plane Sweep Lifting
Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here) Voronoi Diagram & Delaunay Triangualtion Algorithms Divide-&-Conquer Plane Sweep Lifting
Refolding Planar Polygons
 Discrete & Computational Geometry manuscript No. (will be inserted by the editor) Refolding Planar Polygons Hayley N. Iben 1, James F. O Brien 2, Erik D. Demaine 3 1 University of California, Berkeley
Discrete & Computational Geometry manuscript No. (will be inserted by the editor) Refolding Planar Polygons Hayley N. Iben 1, James F. O Brien 2, Erik D. Demaine 3 1 University of California, Berkeley
Motion Planning for a Class of Planar Closed-Chain Manipulators
 Motion Planning for a Class of Planar Closed-Chain Manipulators Guanfeng Liu Department of Computer Science Stanford University Stanford, CA Email:liugf@cs.stanford.edu J.C. Trinkle Department of Computer
Motion Planning for a Class of Planar Closed-Chain Manipulators Guanfeng Liu Department of Computer Science Stanford University Stanford, CA Email:liugf@cs.stanford.edu J.C. Trinkle Department of Computer
Packing Two Disks into a Polygonal Environment
 Packing Two Disks into a Polygonal Environment Prosenjit Bose, School of Computer Science, Carleton University. E-mail: jit@cs.carleton.ca Pat Morin, School of Computer Science, Carleton University. E-mail:
Packing Two Disks into a Polygonal Environment Prosenjit Bose, School of Computer Science, Carleton University. E-mail: jit@cs.carleton.ca Pat Morin, School of Computer Science, Carleton University. E-mail:
Locked and Unlocked Polygonal Chains in 3D
 Locked and Unlocked Polygonal Chains in 3D arxiv:cs/9910009v1 [cs.cg] 8 Oct 1999 T. Biedl E. Demaine M. Demaine S. Lazard A. Lubiw J. O Rourke M. Overmars S. Robbins I. Streinu G. Toussaint S. Whitesides
Locked and Unlocked Polygonal Chains in 3D arxiv:cs/9910009v1 [cs.cg] 8 Oct 1999 T. Biedl E. Demaine M. Demaine S. Lazard A. Lubiw J. O Rourke M. Overmars S. Robbins I. Streinu G. Toussaint S. Whitesides
COMPUTATIONAL GEOMETRY
 Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
Unfolding Rectangle-Faced Orthostacks
 Unfolding Rectangle-Faced Orthostacks Erin W. Chambers Kyle A. Sykes Cynthia M. Traub Abstract We prove that rectangle-faced orthostacks, a restricted class of orthostacks, can be grid-edge unfolded without
Unfolding Rectangle-Faced Orthostacks Erin W. Chambers Kyle A. Sykes Cynthia M. Traub Abstract We prove that rectangle-faced orthostacks, a restricted class of orthostacks, can be grid-edge unfolded without
Planning: Part 1 Classical Planning
 Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
On Multiple Moving Objects 1. Michael Erdmann 2 and Tomfis Lozano-P6rez 2
 Algorithmica (1987) 2:477-521 Algorithmica 9 1987 Springer-Verlag New York lnc. On Multiple Moving Objects 1 Michael Erdmann 2 and Tomfis Lozano-P6rez 2 Abstract. This paper explores the motion-planning
Algorithmica (1987) 2:477-521 Algorithmica 9 1987 Springer-Verlag New York lnc. On Multiple Moving Objects 1 Michael Erdmann 2 and Tomfis Lozano-P6rez 2 Abstract. This paper explores the motion-planning
Roadmap Methods vs. Cell Decomposition in Robot Motion Planning
 Proceedings of the 6th WSEAS International Conference on Signal Processing, Robotics and Automation, Corfu Island, Greece, February 16-19, 007 17 Roadmap Methods vs. Cell Decomposition in Robot Motion
Proceedings of the 6th WSEAS International Conference on Signal Processing, Robotics and Automation, Corfu Island, Greece, February 16-19, 007 17 Roadmap Methods vs. Cell Decomposition in Robot Motion
Edge-Unfolding Orthogonal Polyhedra is Strongly NP-Complete
 CCCG 2011, Toronto ON, August 10 12, 2011 Edge-Unfolding Orthogonal Polyhedra is Strongly NP-Complete Zachary Abel Erik D. Demaine Abstract We prove that it is strongly NP-complete to decide whether a
CCCG 2011, Toronto ON, August 10 12, 2011 Edge-Unfolding Orthogonal Polyhedra is Strongly NP-Complete Zachary Abel Erik D. Demaine Abstract We prove that it is strongly NP-complete to decide whether a
In what follows, we will focus on Voronoi diagrams in Euclidean space. Later, we will generalize to other distance spaces.
 Voronoi Diagrams 4 A city builds a set of post offices, and now needs to determine which houses will be served by which office. It would be wasteful for a postman to go out of their way to make a delivery
Voronoi Diagrams 4 A city builds a set of post offices, and now needs to determine which houses will be served by which office. It would be wasteful for a postman to go out of their way to make a delivery
Refolding Planar Polygons
 Refolding Planar Polygons Hayley N. Iben James F. O Brien Erik D. Demaine University of California, Berkeley Massachusetts Institute of Technology Abstract This paper describes a guaranteed technique for
Refolding Planar Polygons Hayley N. Iben James F. O Brien Erik D. Demaine University of California, Berkeley Massachusetts Institute of Technology Abstract This paper describes a guaranteed technique for
MATH 113 Section 8.2: Two-Dimensional Figures
 MATH 113 Section 8.2: Two-Dimensional Figures Prof. Jonathan Duncan Walla Walla University Winter Quarter, 2008 Outline 1 Classifying Two-Dimensional Shapes 2 Polygons Triangles Quadrilaterals 3 Other
MATH 113 Section 8.2: Two-Dimensional Figures Prof. Jonathan Duncan Walla Walla University Winter Quarter, 2008 Outline 1 Classifying Two-Dimensional Shapes 2 Polygons Triangles Quadrilaterals 3 Other
6.890 Lecture 21 Scribe Notes
 6.890 Lecture 21 Scribe Notes 1 3SUM motivation Throughout this class, we have categorized problems based on whether they were solvable in polynomial time or not. However, it would also be nice to know
6.890 Lecture 21 Scribe Notes 1 3SUM motivation Throughout this class, we have categorized problems based on whether they were solvable in polynomial time or not. However, it would also be nice to know
for Motion Planning RSS Lecture 10 Prof. Seth Teller
 Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Morphing Planar Graph Drawings
 Morphing Planar Graph Drawings Giuseppe Di Battista Università degli Studi Roma Tre The 12th International Conference and Workshops on Algorithms and Computation WALCOM 2018 Basic definitions Graph drawing
Morphing Planar Graph Drawings Giuseppe Di Battista Università degli Studi Roma Tre The 12th International Conference and Workshops on Algorithms and Computation WALCOM 2018 Basic definitions Graph drawing
Configuration Space. Ioannis Rekleitis
 Configuration Space Ioannis Rekleitis Configuration Space Configuration Space Definition A robot configuration is a specification of the positions of all robot points relative to a fixed coordinate system
Configuration Space Ioannis Rekleitis Configuration Space Configuration Space Definition A robot configuration is a specification of the positions of all robot points relative to a fixed coordinate system
On Merging Straight Skeletons
 On Merging Straight Skeletons Franz Aurenhammer 1 and Michael Steinkogler 2 1 Institute for Theoretical Computer Science, University of Technology, Graz, Austria auren@igi.tugraz.at 2 Institute for Theoretical
On Merging Straight Skeletons Franz Aurenhammer 1 and Michael Steinkogler 2 1 Institute for Theoretical Computer Science, University of Technology, Graz, Austria auren@igi.tugraz.at 2 Institute for Theoretical
Dynamic Collision Detection
 Distance Computation Between Non-Convex Polyhedra June 17, 2002 Applications Dynamic Collision Detection Applications Dynamic Collision Detection Evaluating Safety Tolerances Applications Dynamic Collision
Distance Computation Between Non-Convex Polyhedra June 17, 2002 Applications Dynamic Collision Detection Applications Dynamic Collision Detection Evaluating Safety Tolerances Applications Dynamic Collision
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
A 2-CHAIN CAN INTERLOCK WITH AN OPEN 11-CHAIN
 2-CHIN CN INTERLOCK WITH N OPEN 11-CHIN JULIE GLSS, IN LU, JOSEPH O ROURKE, ND JINYUN K. ZHONG bstract. n open problem posed in [3] asked for the minimal k such that a flexible open k-chain can interlock
2-CHIN CN INTERLOCK WITH N OPEN 11-CHIN JULIE GLSS, IN LU, JOSEPH O ROURKE, ND JINYUN K. ZHONG bstract. n open problem posed in [3] asked for the minimal k such that a flexible open k-chain can interlock
The Farthest Point Delaunay Triangulation Minimizes Angles
 The Farthest Point Delaunay Triangulation Minimizes Angles David Eppstein Department of Information and Computer Science UC Irvine, CA 92717 November 20, 1990 Abstract We show that the planar dual to the
The Farthest Point Delaunay Triangulation Minimizes Angles David Eppstein Department of Information and Computer Science UC Irvine, CA 92717 November 20, 1990 Abstract We show that the planar dual to the
Collision Detection. These slides are mainly from Ming Lin s course notes at UNC Chapel Hill
 Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
Lecture Note 2: Configuration Space
 ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
Minimum-Link Watchman Tours
 Minimum-Link Watchman Tours Esther M. Arkin Joseph S. B. Mitchell Christine D. Piatko Abstract We consider the problem of computing a watchman route in a polygon with holes. We show that the problem of
Minimum-Link Watchman Tours Esther M. Arkin Joseph S. B. Mitchell Christine D. Piatko Abstract We consider the problem of computing a watchman route in a polygon with holes. We show that the problem of
Computational Geometry
 Planar point location Point location Introduction Planar point location Strip-based structure Point location problem: Preprocess a planar subdivision such that for any query point q, the face of the subdivision
Planar point location Point location Introduction Planar point location Strip-based structure Point location problem: Preprocess a planar subdivision such that for any query point q, the face of the subdivision
Straight-line Drawability of Embedded Graphs
 Straight-line Drawability of Embedded Graphs Hiroshi Nagamochi Department of Applied Mathematics and Physics, Kyoto University, Yoshida Honmachi, Sakyo, Kyoto 606-8501, Japan. nag@amp.i.kyoto-u.ac.jp Abstract:
Straight-line Drawability of Embedded Graphs Hiroshi Nagamochi Department of Applied Mathematics and Physics, Kyoto University, Yoshida Honmachi, Sakyo, Kyoto 606-8501, Japan. nag@amp.i.kyoto-u.ac.jp Abstract:
Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots
 Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots Jingyu Xiang, Yuichi Tazaki, Tatsuya Suzuki and B. Levedahl Abstract This research develops a new roadmap
Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots Jingyu Xiang, Yuichi Tazaki, Tatsuya Suzuki and B. Levedahl Abstract This research develops a new roadmap
Edge-Unfolding Nested Polyhedral Bands
 Edge-Unfolding Nested Polyhedral Bands Greg Aloupis a,1, Erik D. Demaine b,2, Stefan Langerman c,3, Pat Morin d,1, Joseph O Rourke e,4, Ileana Streinu e,5 and Godfried Toussaint a,1 a School of Computer
Edge-Unfolding Nested Polyhedral Bands Greg Aloupis a,1, Erik D. Demaine b,2, Stefan Langerman c,3, Pat Morin d,1, Joseph O Rourke e,4, Ileana Streinu e,5 and Godfried Toussaint a,1 a School of Computer
Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs
 16-350 Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs Maxim Likhachev Robotics Institute 2D Planning for Omnidirectional Point Robot Planning for omnidirectional
16-350 Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs Maxim Likhachev Robotics Institute 2D Planning for Omnidirectional Point Robot Planning for omnidirectional
Algorithmic Semi-algebraic Geometry and its applications. Saugata Basu School of Mathematics & College of Computing Georgia Institute of Technology.
 1 Algorithmic Semi-algebraic Geometry and its applications Saugata Basu School of Mathematics & College of Computing Georgia Institute of Technology. 2 Introduction: Three problems 1. Plan the motion of
1 Algorithmic Semi-algebraic Geometry and its applications Saugata Basu School of Mathematics & College of Computing Georgia Institute of Technology. 2 Introduction: Three problems 1. Plan the motion of
Other Voronoi/Delaunay Structures
 Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Flattening Fixed-Angle Chains Is Strongly NP-Hard
 Flattening Fixed-Angle Chains Is Strongly NP-Hard Erik D. Demaine and Sarah Eisenstat MIT Computer Science and Artificial Intelligence Laboratory, 32 Vassar St., Cambridge, MA 02139, USA {edemaine,seisenst}@mit.edu
Flattening Fixed-Angle Chains Is Strongly NP-Hard Erik D. Demaine and Sarah Eisenstat MIT Computer Science and Artificial Intelligence Laboratory, 32 Vassar St., Cambridge, MA 02139, USA {edemaine,seisenst}@mit.edu
Manipula0on Algorithms Mo0on Planning. Mo#on Planning I. Katharina Muelling (NREC, Carnegie Mellon University) 1
 1") 16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
Advanced Algorithms Computational Geometry Prof. Karen Daniels. Fall, 2012
 UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
Polygon Triangulation. (slides partially by Daniel Vlasic )
") Polygon Triangulation (slides partially by Daniel Vlasic ) Triangulation: Definition Triangulation of a simple polygon P: decomposition of P into triangles by a maximal set of non-intersecting diagonals
Polygon Triangulation (slides partially by Daniel Vlasic ) Triangulation: Definition Triangulation of a simple polygon P: decomposition of P into triangles by a maximal set of non-intersecting diagonals
DIMACS Center for Discrete Mathematics & Theoretical Computer Science
 DIMACS Center for Discrete Mathematics & Theoretical Computer Science DIMACS EDUCATIONAL MODULE SERIES MODULE 08-1 Linkages as Applied to Protein Folding Date Prepared: March 2008 James D. Factor Marquette
DIMACS Center for Discrete Mathematics & Theoretical Computer Science DIMACS EDUCATIONAL MODULE SERIES MODULE 08-1 Linkages as Applied to Protein Folding Date Prepared: March 2008 James D. Factor Marquette
Computational Geometry [csci 3250]
![Computational Geometry [csci 3250]](/thumbs/93/112686747.jpg "Computational Geometry [csci 3250]") Computational Geometry [csci 3250] Laura Toma Bowdoin College Polygon Triangulation Polygon Triangulation The problem: Triangulate a given polygon. (output a set of diagonals that partition the polygon
Computational Geometry [csci 3250] Laura Toma Bowdoin College Polygon Triangulation Polygon Triangulation The problem: Triangulate a given polygon. (output a set of diagonals that partition the polygon
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Grasping and folding knots
 Grasping and folding knots Weifu Wang Devin Balkcom Abstract String stretched tightly along a sequence of fixed grasp points takes the shape of a polygonal arc. In this work, we investigate how many points
Grasping and folding knots Weifu Wang Devin Balkcom Abstract String stretched tightly along a sequence of fixed grasp points takes the shape of a polygonal arc. In this work, we investigate how many points