6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
|
|
|
- Crystal Jackson
- 6 years ago
- Views:
Transcription
1 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading: Chapter 3, and Craig: Robotics Challenge: Build a Shelter on Mars!
2 Announcements Next Lab Reports: each team member talks about the technical piece he/she executed Sign up for Symposium: Computation and the Transformation of Nearly Everything
3 During the last module we saw Control architectures: reactive, behavior, deliberative Visibility Graphs for Motion Planning Started Configuration Space
4 Today Understand c-space Motion planning with grids Probabilistic motion planning


5 Transforming to C-Space Higher dimension Simpler problem
 C-Space 6D C-space (x,y,z,pitch,roll,yaw) β α γ 3D C-space (α,β,γ) 2n-D C-space (φ 1, ψ 1, φ 2, ψ 2,..., φ n, ψ n)")
6 C-space Overview robot maps to a point in higher dimensional space parameter for each degree of freedom (dof) of robot C-space = set of all robot placements acle = infeasible robot placements 3D C-space (x,y,z) C-Space 6D C-space (x,y,z,pitch,roll,yaw) β α γ 3D C-space (α,β,γ) 2n-D C-space (φ 1, ψ 1, φ 2, ψ 2,..., φ n, ψ n)

7 acle Example
8 Transforming to C-Space
9 acle for fixed robot orientation Robot
10 What if the robot can rotate?
11 What if the robot can rotate?
12 How do we compute C-space Identify dimensions Compute all c-obstacles
13 How do we compute c-obstacles? Step 1: Reflect Robot
14 C-space Algorithm Step 2: Minkowski sum with reflected robot
15 C-space Algorithm Step 2: Vert ( - Robot) + Vert (Obstacle)
16 C-space Algorithm Step 3: ConvexHull (Vert ( - Robot) + Vert (Obstacle))
17 Convex Hull Algorithm
18 How do we compute convex hulls?
19 Convex Hull Algorithm D E C A B
20 Convex Hull Algorithm D E C A B

21 acle with Rotations simple 2D workspace obstacle => complicated 3D acle Figure from Latombe 91
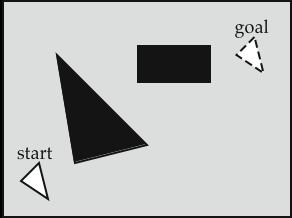
22 Motion Planning Algorithm (1) Compute c-obstacle for each obstacle (Reflect points, Minkowsky sums, convex hull) (2) Find path from start to goal for point robot The robots DOF dictate (1) The method for (2) differentiates among motion planning algorithms
23 Motion Planning Summary Workspace θ obst obst obst obst robot Path is swept volume x robot Path is 1D curve y C-space

24 How do we find the path? Recall Visibility Graphs Figure from Latombe 91 In 2D the V-graph method finds the shortest path from S to G What about 3D?
25 How hard is this to compute? The Complexity of Motion Plannin Most motion planning problems are PSPACE-hard [Reif 79, Hopcroft et al. 84 & 86] The best deterministic algorithm known has running time that is exponential in the dimension of the robot s C-space [Canny 86] C-space has high dimension - 6D for rigid body in 3-space simple obstacles have complex acles impractical to compute explicit representation of freespace for high dof robots So attention has turned to approximation and randomized algorithms which trade full completeness of the planner for a major gain in efficiency

26 Exact Cell Decomposition for finding path


27 Searching the Convex Cells for finding path Build graph Search for path
28 Approximate Cell Decomposition
29 Cell Connectivity Graph
30 Probabilistic Road Maps (PRM) for finding paths [Kavraki at al 96] C-space start goal Roadmap Construction (Pre-processing) 1. Randomly generate robot configurations (nodes) - discard nodes that are invalid 2. Connect pairs of nodes to form roadmap - simple, deterministic local planner (e.g., straightline) - discard paths that are invalid Query processing Primitives Required: 1. Method for Sampling points in C-Space 2. Method for `validating points in C-Space 1. Connect start and goal to roadmap 2. Find path in roadmap between start and goal - regenerate plans for edges in roadmap
31 More PRMS goal PRMs: Pros 1. PRMs are probabilistically complete 2. PRMs apply easily to high-dimensional C-space 3. PRMs support fast queries w/ enough preprocessing start Many success stories where PRMs solve previously unsolved problems
32 More PRMS goal PRMs: Pros 1. PRMs are probabilistically complete 2. PRMs apply easily to high-dimensional C-space 3. PRMs support fast queries w/ enough preprocessing start Many success stories where PRMs solve previously unsolved problems goal PRMs: Cons 1. PRMs don t work as well for some problems: unlikely to sample nodes in narrow passages hard to sample/connect nodes on constraint surfaces start
33 Sampling Around Obstacles [Amato et al 98] To Navigate Narrow Passages we must sample in them most PRM nodes are where planning is easy (not needed) PRM Roadmap goal OBPRM Roadmap goal start start Idea: Can we sample nodes near acle surfaces? we cannot explicitly construct the acles... we do have models of the (workspace) obstacles...
34 OBPRM: Finding points on acles Basic Idea (for workspace obstacle S) 1. Find a point in S s acle (robot placement colliding with S) 2. Select a random direction in C-space 3. Find a free point in that direction 4. Find boundary point between them using binary search (collision checks) Note: we can use more sophisticated approaches to try to cover acle
35 Repairing Paths [Amato et al] Even with the best sampling methods, roadmaps may not contain valid solution paths may lack points in narrow passages may contain approximate paths that are nearly valid acle approximate path acle
36 Repairing Paths [Amato et al] Even with the best sampling methods, roadmaps may not contain valid solution paths may lack points in narrow passages may contain approximate paths that are nearly valid Repairing/Improving Approximate Paths 1. Create initial roadmap 2. Extract approximate path P 3. Repair P (push to C-free) Focus search around P Use OBPRM-like techniques approximate path acle acle repaired path
37 Algorithm Summary Compute c-space for each obstacle Compute graph representation Find path from start to goal G V-graph complete; gives optimal shortest path in 2d What about 3d? What else can we optimize? S

38 Piano Movers Problem Donald et al 93
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
for Motion Planning RSS Lecture 10 Prof. Seth Teller
 Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Probabilistic Motion Planning: Algorithms and Applications
 Probabilistic Motion Planning: Algorithms and Applications Jyh-Ming Lien Department of Computer Science George Mason University Motion Planning in continuous spaces (Basic) Motion Planning (in a nutshell):
Probabilistic Motion Planning: Algorithms and Applications Jyh-Ming Lien Department of Computer Science George Mason University Motion Planning in continuous spaces (Basic) Motion Planning (in a nutshell):
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning
 6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Motion Planning. Jana Kosecka Department of Computer Science
 Motion Planning Jana Kosecka Department of Computer Science Discrete planning, graph search, shortest path, A* methods Road map methods Configuration space Slides thanks to http://cs.cmu.edu/~motionplanning,
Motion Planning Jana Kosecka Department of Computer Science Discrete planning, graph search, shortest path, A* methods Road map methods Configuration space Slides thanks to http://cs.cmu.edu/~motionplanning,
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Lecture 3: Motion Planning (cont.)
") CS 294-115 Algorithmic Human-Robot Interaction Fall 2016 Lecture 3: Motion Planning (cont.) Scribes: Molly Nicholas, Chelsea Zhang 3.1 Previously in class... Recall that we defined configuration spaces.
CS 294-115 Algorithmic Human-Robot Interaction Fall 2016 Lecture 3: Motion Planning (cont.) Scribes: Molly Nicholas, Chelsea Zhang 3.1 Previously in class... Recall that we defined configuration spaces.
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Lecture 3: Motion Planning 2
 CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
Road Map Methods. Including material from Howie Choset / G.D. Hager S. Leonard
 Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Introduction to State-of-the-art Motion Planning Algorithms. Presented by Konstantinos Tsianos
 Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
CS Path Planning
 Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Probabilistic roadmaps for efficient path planning
 Probabilistic roadmaps for efficient path planning Dan A. Alcantara March 25, 2007 1 Introduction The problem of finding a collision-free path between points in space has applications across many different
Probabilistic roadmaps for efficient path planning Dan A. Alcantara March 25, 2007 1 Introduction The problem of finding a collision-free path between points in space has applications across many different
Sampling-Based Robot Motion Planning. Lydia Kavraki Department of Computer Science Rice University Houston, TX USA
 Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
6.141: Robotics systems and science Lecture 10: Motion Planning III
 6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
vizmo++: a Visualization, Authoring, and Educational Tool for Motion Planning
 vizmo++: a Visualization, Authoring, and Educational Tool for Motion Planning Aimée Vargas E. Jyh-Ming Lien Nancy M. Amato. aimee@cs.tamu.edu neilien@cs.tamu.edu amato@cs.tamu.edu Technical Report TR05-011
vizmo++: a Visualization, Authoring, and Educational Tool for Motion Planning Aimée Vargas E. Jyh-Ming Lien Nancy M. Amato. aimee@cs.tamu.edu neilien@cs.tamu.edu amato@cs.tamu.edu Technical Report TR05-011
Sampling-Based Motion Planning
 Sampling-Based Motion Planning Pieter Abbeel UC Berkeley EECS Many images from Lavalle, Planning Algorithms Motion Planning Problem Given start state x S, goal state x G Asked for: a sequence of control
Sampling-Based Motion Planning Pieter Abbeel UC Berkeley EECS Many images from Lavalle, Planning Algorithms Motion Planning Problem Given start state x S, goal state x G Asked for: a sequence of control
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Star-shaped Roadmaps - A Deterministic Sampling Approach for Complete Motion Planning
 Star-shaped Roadmaps - A Deterministic Sampling Approach for Complete Motion Planning Gokul Varadhan Dinesh Manocha University of North Carolina at Chapel Hill http://gamma.cs.unc.edu/motion/ Email: {varadhan,dm}@cs.unc.edu
Star-shaped Roadmaps - A Deterministic Sampling Approach for Complete Motion Planning Gokul Varadhan Dinesh Manocha University of North Carolina at Chapel Hill http://gamma.cs.unc.edu/motion/ Email: {varadhan,dm}@cs.unc.edu
Sampling-based Planning 2
 RBE MOTION PLANNING Sampling-based Planning 2 Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Problem with KD-tree RBE MOTION PLANNING Curse of dimension
RBE MOTION PLANNING Sampling-based Planning 2 Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Problem with KD-tree RBE MOTION PLANNING Curse of dimension
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
II. RELATED WORK. A. Probabilistic roadmap path planner
 Gaussian PRM Samplers for Dynamic Configuration Spaces Yu-Te Lin and Shih-Chia Cheng Computer Science Department Stanford University Stanford, CA 94305, USA {yutelin, sccheng}@cs.stanford.edu SUID: 05371954,
Gaussian PRM Samplers for Dynamic Configuration Spaces Yu-Te Lin and Shih-Chia Cheng Computer Science Department Stanford University Stanford, CA 94305, USA {yutelin, sccheng}@cs.stanford.edu SUID: 05371954,
SUN ET AL.: NARROW PASSAGE SAMPLING FOR PROBABILISTIC ROADMAP PLANNING 1. Cover Page
 SUN ET AL.: NARROW PASSAGE SAMPLING FOR PROBABILISTIC ROADMAP PLANNING 1 Cover Page Paper Type: Regular Paper Paper Title: Narrow Passage Sampling for Probabilistic Roadmap Planning Authors Names and Addresses:
SUN ET AL.: NARROW PASSAGE SAMPLING FOR PROBABILISTIC ROADMAP PLANNING 1 Cover Page Paper Type: Regular Paper Paper Title: Narrow Passage Sampling for Probabilistic Roadmap Planning Authors Names and Addresses:
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
A Hybrid Approach for Complete Motion Planning
 A Hybrid Approach for Complete Motion Planning Liangjun Zhang 1 Young J. Kim 2 Dinesh Manocha 1 1 Dept. of Computer Science, University of North Carolina at Chapel Hill, USA, {zlj,dm}@cs.unc.edu 2 Dept.
A Hybrid Approach for Complete Motion Planning Liangjun Zhang 1 Young J. Kim 2 Dinesh Manocha 1 1 Dept. of Computer Science, University of North Carolina at Chapel Hill, USA, {zlj,dm}@cs.unc.edu 2 Dept.
Motion Planning 2D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
A Hybrid Approach for Complete Motion Planning
 A Hybrid Approach for Complete Motion Planning Liangjun Zhang 1 Young J. Kim 2 Dinesh Manocha 1 1 Dept. of Computer Science, University of North Carolina at Chapel Hill, USA, {zlj,dm}@cs.unc.edu 2 Dept.
A Hybrid Approach for Complete Motion Planning Liangjun Zhang 1 Young J. Kim 2 Dinesh Manocha 1 1 Dept. of Computer Science, University of North Carolina at Chapel Hill, USA, {zlj,dm}@cs.unc.edu 2 Dept.
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING
 MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Motion Planning 1 Retraction and Cell Decomposition
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Computational Geometry csci3250. Laura Toma. Bowdoin College
 Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Providing Haptic Hints to Automatic Motion Planners
 Providing Haptic Hints to Automatic Motion Planners O. Burchan Bayazit Guang Song Nancy M. Amato fburchanb,gsong,amatog@cs.tamu.edu Department of Computer Science, Texas A&M University College Station,
Providing Haptic Hints to Automatic Motion Planners O. Burchan Bayazit Guang Song Nancy M. Amato fburchanb,gsong,amatog@cs.tamu.edu Department of Computer Science, Texas A&M University College Station,
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Motion Planning. Thanks to Piotr Indyk. Lecture 11: Motion Planning
 Motion Planning Thanks to Piotr Indyk Piano Mover s Problem Given: A set of obstacles The initial position of a robot The final position of a robot Goal: find a path that Moves the robot from the initial
Motion Planning Thanks to Piotr Indyk Piano Mover s Problem Given: A set of obstacles The initial position of a robot The final position of a robot Goal: find a path that Moves the robot from the initial
Motion Planning with Dynamics, Physics based Simulations, and Linear Temporal Objectives. Erion Plaku
 Motion Planning with Dynamics, Physics based Simulations, and Linear Temporal Objectives Erion Plaku Laboratory for Computational Sensing and Robotics Johns Hopkins University Frontiers of Planning The
Motion Planning with Dynamics, Physics based Simulations, and Linear Temporal Objectives Erion Plaku Laboratory for Computational Sensing and Robotics Johns Hopkins University Frontiers of Planning The
Evaluation of the K-closest Neighbor Selection Strategy for PRM Construction
 Evaluation of the K-closest Neighbor Selection Strategy for PRM Construction Troy McMahon, Sam Jacobs, Bryan Boyd, Lydia Tapia, Nancy M. Amato Parasol Laboratory, Dept. of Computer Science and Engineering,
Evaluation of the K-closest Neighbor Selection Strategy for PRM Construction Troy McMahon, Sam Jacobs, Bryan Boyd, Lydia Tapia, Nancy M. Amato Parasol Laboratory, Dept. of Computer Science and Engineering,
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization
 Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
CS 763 F16. Moving objects in space with obstacles/constraints.
 Moving objects in space with obstacles/constraints. Objects = robots, vehicles, jointed linkages (robot arm), tools (e.g. on automated assembly line), foldable/bendable objects. Objects need not be physical
Moving objects in space with obstacles/constraints. Objects = robots, vehicles, jointed linkages (robot arm), tools (e.g. on automated assembly line), foldable/bendable objects. Objects need not be physical
Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,!
 Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
T S. Configuration Space S1 LP S0 ITM. S3 Start cfg
 An Adaptive Framework for `Single Shot' Motion Planning Λ Daniel R. Vallejo Christopher Jones Nancy M. Amato Texas A&M University Sandia National Laboratories Texas A&M University dvallejo@cs.tamu.edu
An Adaptive Framework for `Single Shot' Motion Planning Λ Daniel R. Vallejo Christopher Jones Nancy M. Amato Texas A&M University Sandia National Laboratories Texas A&M University dvallejo@cs.tamu.edu
Motion Planning via Manifold Samples
 The Raymond and Beverly Sackler Faculty of Exact Sciences The Blavatnik School of Computer Science Motion Planning via Manifold Samples Thesis submitted in partial fulfillment of the requirements for the
The Raymond and Beverly Sackler Faculty of Exact Sciences The Blavatnik School of Computer Science Motion Planning via Manifold Samples Thesis submitted in partial fulfillment of the requirements for the
Probabilistic Roadmap Planner with Adaptive Sampling Based on Clustering
 Proceedings of the 2nd International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 7-8 2015 Paper No. 173 Probabilistic Roadmap Planner with Adaptive Sampling Based
Proceedings of the 2nd International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 7-8 2015 Paper No. 173 Probabilistic Roadmap Planner with Adaptive Sampling Based
UOBPRM: A Uniformly Distributed Obstacle-Based PRM
 UOBPRM: A Uniformly Distributed Obstacle-Based PRM Hsin-Yi (Cindy) Yeh 1, Shawna Thomas 1, David Eppstein 2 and Nancy M. Amato 1 Abstract This paper presents a new sampling method for motion planning that
UOBPRM: A Uniformly Distributed Obstacle-Based PRM Hsin-Yi (Cindy) Yeh 1, Shawna Thomas 1, David Eppstein 2 and Nancy M. Amato 1 Abstract This paper presents a new sampling method for motion planning that
Search Spaces I. Before we get started... ME/CS 132b Advanced Robotics: Navigation and Perception 4/05/2011
 Search Spaces I b Advanced Robotics: Navigation and Perception 4/05/2011 1 Before we get started... Website updated with Spring quarter grading policy 30% homework, 20% lab, 50% course project Website
Search Spaces I b Advanced Robotics: Navigation and Perception 4/05/2011 1 Before we get started... Website updated with Spring quarter grading policy 30% homework, 20% lab, 50% course project Website
Choosing Good Distance Metrics and Local Planners for Probabilistic Roadmap Methods
 Choosing Good and Local Planners for Probabilistic Roadmap Methods Nancy M. Amato O. Burchan Bayazit Lucia K. Dale Christopher Jones Daniel Vallejo Technical Report 98- Department of Computer Science Texas
Choosing Good and Local Planners for Probabilistic Roadmap Methods Nancy M. Amato O. Burchan Bayazit Lucia K. Dale Christopher Jones Daniel Vallejo Technical Report 98- Department of Computer Science Texas
Mobile Robots Path Planning using Genetic Algorithms
 Mobile Robots Path Planning using Genetic Algorithms Nouara Achour LRPE Laboratory, Department of Automation University of USTHB Algiers, Algeria nachour@usthb.dz Mohamed Chaalal LRPE Laboratory, Department
Mobile Robots Path Planning using Genetic Algorithms Nouara Achour LRPE Laboratory, Department of Automation University of USTHB Algiers, Algeria nachour@usthb.dz Mohamed Chaalal LRPE Laboratory, Department
Providing Haptic Hints to Automatic Motion Planners
 Providing Haptic Hints to Automatic Motion Planners Nancy M. Amato O. Burchan Bayazit Kyunghwan Kim amato@cs.tamu.edu burchanb@cs.tamu.edu kimk@cs.tamu.edu Wookho Son wooks@cs.tamu.edu Guang Song gsong@cs.tamu.edu
Providing Haptic Hints to Automatic Motion Planners Nancy M. Amato O. Burchan Bayazit Kyunghwan Kim amato@cs.tamu.edu burchanb@cs.tamu.edu kimk@cs.tamu.edu Wookho Son wooks@cs.tamu.edu Guang Song gsong@cs.tamu.edu
OPTIMIZATION TECHNIQUES FOR PROBABILISTIC ROADMAPS A Dissertation by LUCIA KATHRYN DALE Submitted to Texas A&M University in partial fulfillment of th
 OPTIMIZATION TECHNIQUES FOR PROBABILISTIC ROADMAPS A Dissertation by LUCIA KATHRYN DALE Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for
OPTIMIZATION TECHNIQUES FOR PROBABILISTIC ROADMAPS A Dissertation by LUCIA KATHRYN DALE Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for
Robotics: Science and Systems I Lab 6: Motion Planning and Global Navigation Begins: 3/5/2014, 3pm Due: 3/12/2014, 3pm
 Objectives and Lab Overview Massachusetts Institute of Technology Robotics: Science and Systems I Lab 6: Motion Planning and Global Navigation Begins: 3/5/2014, 3pm Due: 3/12/2014, 3pm Your objective in
Objectives and Lab Overview Massachusetts Institute of Technology Robotics: Science and Systems I Lab 6: Motion Planning and Global Navigation Begins: 3/5/2014, 3pm Due: 3/12/2014, 3pm Your objective in
Shorter, Smaller, Tighter Old and New Challenges
 How can Computational Geometry help Robotics and Automation: Shorter, Smaller, Tighter Old and New Challenges Dan Halperin School of Computer Science Tel Aviv University Algorithms in the Field/CG, CG
How can Computational Geometry help Robotics and Automation: Shorter, Smaller, Tighter Old and New Challenges Dan Halperin School of Computer Science Tel Aviv University Algorithms in the Field/CG, CG
1 Introduction Automatic motion planning deals with finding a feasible sequence of motions to take some moving object (the `robot') from a given initi
 from a given initi") Customizing PRM Roadmaps at Query Time Λ Guang Song Shawna Miller Nancy M. Amato Dept. of Computer Science Dept. of Computer Science Dept. of Computer Science gsong@cs.tamu.edu slm5563@cs.tamu.edu amato@cs.tamu.edu
Customizing PRM Roadmaps at Query Time Λ Guang Song Shawna Miller Nancy M. Amato Dept. of Computer Science Dept. of Computer Science Dept. of Computer Science gsong@cs.tamu.edu slm5563@cs.tamu.edu amato@cs.tamu.edu
Robot Motion Planning and (a little) Computational Geometry
 Computational Geometry") Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Workspace Importance Sampling for Probabilistic Roadmap Planning
 Workspace Importance Sampling for Probabilistic Roadmap Planning Hanna Kurniawati David Hsu Department of Computer Science National University of Singapore Singapore, Republic of Singapore {hannakur, dyhsu}@comp.nus.edu.sg
Workspace Importance Sampling for Probabilistic Roadmap Planning Hanna Kurniawati David Hsu Department of Computer Science National University of Singapore Singapore, Republic of Singapore {hannakur, dyhsu}@comp.nus.edu.sg
Customizing PRM Roadmaps at Query Time Λ
 Customizing PRM Roadmaps at Query Time Λ Guang Song Shawna Miller Nancy M. Amato Department of Computer Science Texas A&M University College Station, TX 77843-3112 fgsong,slm5563,amatog@cs.tamu.edu Abstract
Customizing PRM Roadmaps at Query Time Λ Guang Song Shawna Miller Nancy M. Amato Department of Computer Science Texas A&M University College Station, TX 77843-3112 fgsong,slm5563,amatog@cs.tamu.edu Abstract
Func%on Approxima%on. Pieter Abbeel UC Berkeley EECS
 Func%on Approxima%on Pieter Abbeel UC Berkeley EECS Value Itera4on Algorithm: Start with for all s. For i=1,, H For all states s 2 S: Imprac4cal for large state spaces = the expected sum of rewards accumulated
Func%on Approxima%on Pieter Abbeel UC Berkeley EECS Value Itera4on Algorithm: Start with for all s. For i=1,, H For all states s 2 S: Imprac4cal for large state spaces = the expected sum of rewards accumulated
The Toggle Local Planner for Sampling-Based Motion Planning
 The Toggle Local Planner for Sampling-Based Motion Planning Jory Denny and Nancy M. Amato Abstract Sampling-based solutions to the motion planning problem, such as the probabilistic roadmap method (PRM),
The Toggle Local Planner for Sampling-Based Motion Planning Jory Denny and Nancy M. Amato Abstract Sampling-based solutions to the motion planning problem, such as the probabilistic roadmap method (PRM),
A Voronoi-Based Hybrid Motion Planner
 A Voronoi-Based Hybrid Motion Planner Mark Foskey Maxim Garber Ming C. Lin Dinesh Manocha Department of Computer Science University of North Carolina at Chapel Hill http://www.cs.unc.edu/ geom/voronoi/vplan
A Voronoi-Based Hybrid Motion Planner Mark Foskey Maxim Garber Ming C. Lin Dinesh Manocha Department of Computer Science University of North Carolina at Chapel Hill http://www.cs.unc.edu/ geom/voronoi/vplan
Nonholonomic motion planning for car-like robots
 Nonholonomic motion planning for car-like robots A. Sánchez L. 2, J. Abraham Arenas B. 1, and René Zapata. 2 1 Computer Science Dept., BUAP Puebla, Pue., México {aarenas}@cs.buap.mx 2 LIRMM, UMR5506 CNRS,
Nonholonomic motion planning for car-like robots A. Sánchez L. 2, J. Abraham Arenas B. 1, and René Zapata. 2 1 Computer Science Dept., BUAP Puebla, Pue., México {aarenas}@cs.buap.mx 2 LIRMM, UMR5506 CNRS,
CHAPTER SIX. the RRM creates small covering roadmaps for all tested environments.
 CHAPTER SIX CREATING SMALL ROADMAPS Many algorithms have been proposed that create a roadmap from which a path for a moving object can be extracted. These algorithms generally do not give guarantees on
CHAPTER SIX CREATING SMALL ROADMAPS Many algorithms have been proposed that create a roadmap from which a path for a moving object can be extracted. These algorithms generally do not give guarantees on
Efficient Motion Planning for Humanoid Robots using Lazy Collision Checking and Enlarged Robot Models
 Efficient Motion Planning for Humanoid Robots using Lazy Collision Checking and Enlarged Robot Models Nikolaus Vahrenkamp, Tamim Asfour and Rüdiger Dillmann Institute of Computer Science and Engineering
Efficient Motion Planning for Humanoid Robots using Lazy Collision Checking and Enlarged Robot Models Nikolaus Vahrenkamp, Tamim Asfour and Rüdiger Dillmann Institute of Computer Science and Engineering
Path Planning for a Robot Manipulator based on Probabilistic Roadmap and Reinforcement Learning
 674 International Journal Jung-Jun of Control, Park, Automation, Ji-Hun Kim, and and Systems, Jae-Bok vol. Song 5, no. 6, pp. 674-680, December 2007 Path Planning for a Robot Manipulator based on Probabilistic
674 International Journal Jung-Jun of Control, Park, Automation, Ji-Hun Kim, and and Systems, Jae-Bok vol. Song 5, no. 6, pp. 674-680, December 2007 Path Planning for a Robot Manipulator based on Probabilistic
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Minkowski Sums. Dinesh Manocha Gokul Varadhan. UNC Chapel Hill. NUS CS 5247 David Hsu
 Minkowski Sums Dinesh Manocha Gokul Varadhan UNC Chapel Hill NUS CS 5247 David Hsu Last Lecture Configuration space workspace configuration space 2 Problem Configuration Space of a Translating Robot Input:
Minkowski Sums Dinesh Manocha Gokul Varadhan UNC Chapel Hill NUS CS 5247 David Hsu Last Lecture Configuration space workspace configuration space 2 Problem Configuration Space of a Translating Robot Input:
Specialized PRM Trajectory Planning For Hyper-Redundant Robot Manipulators
 Specialized PRM Trajectory Planning For Hyper-Redundant Robot Manipulators MAHDI F. GHAJARI and RENE V. MAYORGA Department of Industrial Systems Engineering University of Regina 3737 Wascana Parkway, Regina,
Specialized PRM Trajectory Planning For Hyper-Redundant Robot Manipulators MAHDI F. GHAJARI and RENE V. MAYORGA Department of Industrial Systems Engineering University of Regina 3737 Wascana Parkway, Regina,
Decomposition-based Motion Planning: Towards Real-time Planning for Robots with Many Degrees of Freedom. Abstract
 Decomposition-based Motion Planning: Towards Real-time Planning for Robots with Many Degrees of Freedom Oliver Brock Lydia E. Kavraki Department of Computer Science Rice University, Houston, Texas 77005
Decomposition-based Motion Planning: Towards Real-time Planning for Robots with Many Degrees of Freedom Oliver Brock Lydia E. Kavraki Department of Computer Science Rice University, Houston, Texas 77005
Figure 1: A typical industrial scene with over 4000 obstacles. not cause collisions) into a number of cells. Motion is than planned through these cell
 into a number of cells. Motion is than planned through these cell") Recent Developments in Motion Planning Λ Mark H. Overmars Institute of Information and Computing Sciences, Utrecht University, P.O. Box 80.089, 3508 TB Utrecht, the Netherlands. Email: markov@cs.uu.nl.
Recent Developments in Motion Planning Λ Mark H. Overmars Institute of Information and Computing Sciences, Utrecht University, P.O. Box 80.089, 3508 TB Utrecht, the Netherlands. Email: markov@cs.uu.nl.
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots
 Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots Jingyu Xiang, Yuichi Tazaki, Tatsuya Suzuki and B. Levedahl Abstract This research develops a new roadmap
Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots Jingyu Xiang, Yuichi Tazaki, Tatsuya Suzuki and B. Levedahl Abstract This research develops a new roadmap
Hot topics and Open problems in Computational Geometry. My (limited) perspective. Class lecture for CSE 546,
 perspective. Class lecture for CSE 546,") Hot topics and Open problems in Computational Geometry. My (limited) perspective Class lecture for CSE 546, 2-13-07 Some slides from this talk are from Jack Snoeyink and L. Kavrakis Key trends on Computational
Hot topics and Open problems in Computational Geometry. My (limited) perspective Class lecture for CSE 546, 2-13-07 Some slides from this talk are from Jack Snoeyink and L. Kavrakis Key trends on Computational
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
f-v v-f f-e e-f f-f e-e-cross e-v v-e degenerate PCs e-e-touch v-v
 Planning Motion Compliant to Complex Contact States Λ uerong Ji, Jing iao Computer Science Department University of North Carolina - Charlotte Charlotte, NC 28223, US xji@uncc.edu, xiao@uncc.edu bstract
Planning Motion Compliant to Complex Contact States Λ uerong Ji, Jing iao Computer Science Department University of North Carolina - Charlotte Charlotte, NC 28223, US xji@uncc.edu, xiao@uncc.edu bstract
INCREASING THE CONNECTIVITY OF PROBABILISTIC ROADMAPS VIA GENETIC POST-PROCESSING. Giuseppe Oriolo Stefano Panzieri Andrea Turli
 INCREASING THE CONNECTIVITY OF PROBABILISTIC ROADMAPS VIA GENETIC POST-PROCESSING Giuseppe Oriolo Stefano Panzieri Andrea Turli Dip. di Informatica e Sistemistica, Università di Roma La Sapienza, Via Eudossiana
INCREASING THE CONNECTIVITY OF PROBABILISTIC ROADMAPS VIA GENETIC POST-PROCESSING Giuseppe Oriolo Stefano Panzieri Andrea Turli Dip. di Informatica e Sistemistica, Università di Roma La Sapienza, Via Eudossiana
SPATIAL GUIDANCE TO RRT PLANNER USING CELL-DECOMPOSITION ALGORITHM
 SPATIAL GUIDANCE TO RRT PLANNER USING CELL-DECOMPOSITION ALGORITHM Ahmad Abbadi, Radomil Matousek, Pavel Osmera, Lukas Knispel Brno University of Technology Institute of Automation and Computer Science
SPATIAL GUIDANCE TO RRT PLANNER USING CELL-DECOMPOSITION ALGORITHM Ahmad Abbadi, Radomil Matousek, Pavel Osmera, Lukas Knispel Brno University of Technology Institute of Automation and Computer Science
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
video 1 video 2 Motion Planning (It s all in the discretization) Digital Actors Basic problem Basic problem Two Possible Discretizations
 Digital Actors Basic problem Basic problem Two Possible Discretizations") Motion Planning (It s all in the discretization) Motion planning is the ability for an agent to compute its own motions in order to achieve certain goals. ll autonomous robots and digital actors should
Motion Planning (It s all in the discretization) Motion planning is the ability for an agent to compute its own motions in order to achieve certain goals. ll autonomous robots and digital actors should
Planning with Reachable Distances: Fast Enforcement of Closure Constraints
 Planning with Reachable Distances: Fast Enforcement of Closure Constraints Xinyu Tang Shawna Thomas Nancy M. Amato xinyut@cs.tamu.edu sthomas@cs.tamu.edu amato@cs.tamu.edu Technical Report TR6-8 Parasol
Planning with Reachable Distances: Fast Enforcement of Closure Constraints Xinyu Tang Shawna Thomas Nancy M. Amato xinyut@cs.tamu.edu sthomas@cs.tamu.edu amato@cs.tamu.edu Technical Report TR6-8 Parasol
Outline. Robotics Planning. Example: Getting to DC from Atlanta. Introduction
 Outline Robotics Planning Henrik I Christensen Introduction Representations Planning Basics Search methods Evaluation (or the lack thereof) Summary Introduction Example: Getting to DC from Atlanta Generation
Outline Robotics Planning Henrik I Christensen Introduction Representations Planning Basics Search methods Evaluation (or the lack thereof) Summary Introduction Example: Getting to DC from Atlanta Generation
RESAMPL: A Region-Sensitive Adaptive Motion Planner
 REAMPL: A Region-ensitive Adaptive Motion Planner amuel Rodriguez, hawna Thomas, Roger Pearce, and Nancy M. Amato Parasol Lab, Department of Computer cience, Texas A&M University, College tation, TX UA
REAMPL: A Region-ensitive Adaptive Motion Planner amuel Rodriguez, hawna Thomas, Roger Pearce, and Nancy M. Amato Parasol Lab, Department of Computer cience, Texas A&M University, College tation, TX UA
Path Planning for Point Robots. NUS CS 5247 David Hsu
 Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Approximate path planning. Computational Geometry csci3250 Laura Toma Bowdoin College
 Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Path Planning among Movable Obstacles: a Probabilistically Complete Approach
 Path Planning among Movable Obstacles: a Probabilistically Complete Approach Jur van den Berg 1, Mike Stilman 2, James Kuffner 3, Ming Lin 1, and Dinesh Manocha 1 1 Department of Computer Science, University
Path Planning among Movable Obstacles: a Probabilistically Complete Approach Jur van den Berg 1, Mike Stilman 2, James Kuffner 3, Ming Lin 1, and Dinesh Manocha 1 1 Department of Computer Science, University
Manipula0on Algorithms Mo0on Planning. Mo#on Planning I. Katharina Muelling (NREC, Carnegie Mellon University) 1
 1") 16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
CS 378: Computer Game Technology
 CS 378: Computer Game Technology Dynamic Path Planning, Flocking Spring 2012 University of Texas at Austin CS 378 Game Technology Don Fussell Dynamic Path Planning! What happens when the environment changes
CS 378: Computer Game Technology Dynamic Path Planning, Flocking Spring 2012 University of Texas at Austin CS 378 Game Technology Don Fussell Dynamic Path Planning! What happens when the environment changes
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
Factor-Guided Motion Planning for a Robot Arm
 Factor-Guided Motion Planning for a Robot Arm Jaesik Choi and Eyal Amir Computer Science Department University of Illinois at Urbana-Champaign Urbana, IL 61801 {choi31,eyal}@cs.uiuc.edu Abstract Motion
Factor-Guided Motion Planning for a Robot Arm Jaesik Choi and Eyal Amir Computer Science Department University of Illinois at Urbana-Champaign Urbana, IL 61801 {choi31,eyal}@cs.uiuc.edu Abstract Motion
Deformable Robot Motion Planning in a Reduced-Dimension Configuration Space
 2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Deformable Robot Motion Planning in a Reduced-Dimension Configuration Space
2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Deformable Robot Motion Planning in a Reduced-Dimension Configuration Space
Discrete search algorithms
 Robot Autonomy (16-662, S13) Lecture#08 (Monday February 11) Discrete search algorithms Lecturer: Siddhartha Srinivasa Scribes: Kavya Suresh & David Matten I. INTRODUCTION These notes contain a detailed
Robot Autonomy (16-662, S13) Lecture#08 (Monday February 11) Discrete search algorithms Lecturer: Siddhartha Srinivasa Scribes: Kavya Suresh & David Matten I. INTRODUCTION These notes contain a detailed
Collision Detection. These slides are mainly from Ming Lin s course notes at UNC Chapel Hill
 Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
A Voronoi-Based Hybrid Motion Planner for Rigid Bodies
 A Voronoi-Based Hybrid Motion Planner for Rigid Bodies Mark Foskey Maxim Garber Ming C. Lin Dinesh Manocha Department of Computer Science University of North Carolina Chapel Hill, NC 27599-3175 ffoskey,garber,lin,dmg@cs.unc.edu
A Voronoi-Based Hybrid Motion Planner for Rigid Bodies Mark Foskey Maxim Garber Ming C. Lin Dinesh Manocha Department of Computer Science University of North Carolina Chapel Hill, NC 27599-3175 ffoskey,garber,lin,dmg@cs.unc.edu
Kinodynamic Motion Planning on Roadmaps in Dynamic Environments
 Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 ThD11.1 Kinodynamic Motion Planning on Roadmaps in Dynamic Environments
Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 ThD11.1 Kinodynamic Motion Planning on Roadmaps in Dynamic Environments
VISUALIZATION TOOLS FOR MOVING OBJECTS. A Thesis AIMÉE VARGAS ESTRADA
 VISUALIZATION TOOLS FOR MOVING OBJECTS A Thesis by AIMÉE VARGAS ESTRADA Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of
VISUALIZATION TOOLS FOR MOVING OBJECTS A Thesis by AIMÉE VARGAS ESTRADA Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of