Configuration Space. Ioannis Rekleitis
|
|
|
- Alberta Flowers
- 5 years ago
- Views:
Transcription

1 Configuration Space Ioannis Rekleitis
2 Configuration Space

3 Configuration Space
4 Definition A robot configuration is a specification of the positions of all robot points relative to a fixed coordinate system Usually a configuration is expressed as a vector of position/orientation parameters


5 What is a Path? q init q goal q goal q init


6 What is a Path?
7 Tool: Configuration Space (C-Space C) q 2 q 1 q 2 q 1
 q 2 q 1 q 2 q")
8 Tool: Configuration Space (C-Space C) q 2 q 1 q 2 q 1
9 Tool: Configuration Space (C-Space C)
10 Articulated Robot Example q = (q 1,q 2,,q 10 ) q 2 q 1
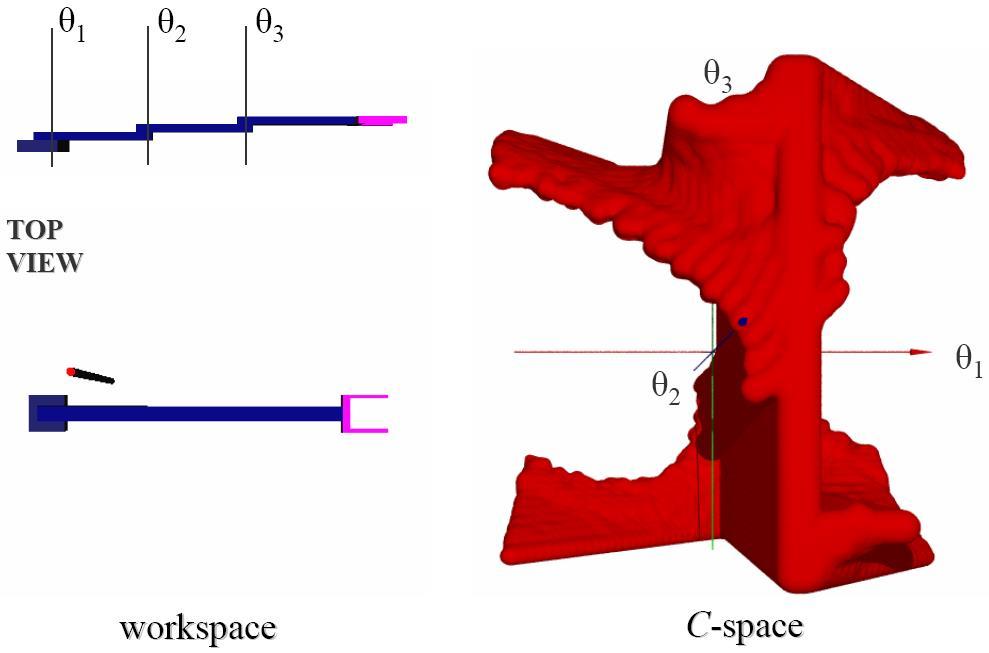
11 Configuration Space of a Robot Space of all its possible configurations But the topology of this space is usually not that of a Cartesian space C = S 1 x S 1
12 Configuration Space of a Robot Space of all its possible configurations But the topology of this space is usually not that of a Cartesian space C = S 1 x S 1
13 Configuration Space of a Robot Space of all its possible configurations But the topology of this space is usually not that of a Cartesian space C = S 1 x S 1
14 Structure of Configuration Space It is a manifold For each point q, there is a 1-to-1 map between a neighborhood of q and a Cartesian space R n, where n is the dimension of C This map is a local coordinate system called a chart. C can always be covered by a finite number of charts. Such a set is called an atlas

15 Example
16 Case of a Planar Rigid Robot workspace y robot reference direction q reference point 3-parameter representation: q = (x,y,q) with q [0,2p). Two charts are needed Other representation: q = (x,y,cosq,sinq) c-space is a 3-D cylinder R 2 x S 1 embedded in a 4-D space x
17 Rigid Robot in 3-D Workspace q = (x,y,z,a,b,g) The c-space is a 6-D space (manifold) embedded in a 12-D Cartesian space. It is denoted by R 3 xso(3) Other representation: q = (x,y,z,r 11,r 12,,r 33 ) where r 11, r 12,, r 33 are the elements of rotation matrix R: r 11 r 12 r 13 r 21 r 22 r 23 r 31 r 32 r 33 with: r i12 +r i22 +r i3 2 = 1 r i1 r j1 + r i2 r 2j + r i3 r j3 = 0 det(r) = +1
 z z 1 2 3 4")
18 Parameterization of SO(3) Euler angles: (f,q,y) z z Unit quaternion: x y f q x x y y y x (cos q/2, n 1 sin q/2, n 2 sin q/2, n 3 sin q/2) z z y

19 A welding robot
20 A Stuart Platform
21 Barrett WAM arm
22 Barrett WAM arm on a mobile platform
23 Configuration Space Obstacle

24 Two link path

25 2D Rigid Object
26 The Configuration Space


27 Moving a piano
28 Parameterization of Torus
29 Metric in Configuration Space A metric or distance function d in C is a map d: (q 1,q 2 ) C 2 d(q 1,q 2 ) > 0 such that: d(q 1,q 2 ) = 0 if and only if q 1 = q 2 d(q 1,q 2 ) = d (q 2,q 1 ) d(q 1,q 2 ) < d(q 1,q 3 ) + d(q 3,q 2 )
30 Metric in Configuration Space Example: Robot A and point x of A x(q): location of x in the workspace when A is at configuration q A distance d in C is defined by: d(q,q ) = max x A x(q)-x(q ) where a - b denotes the Euclidean distance between points a and b in the workspace
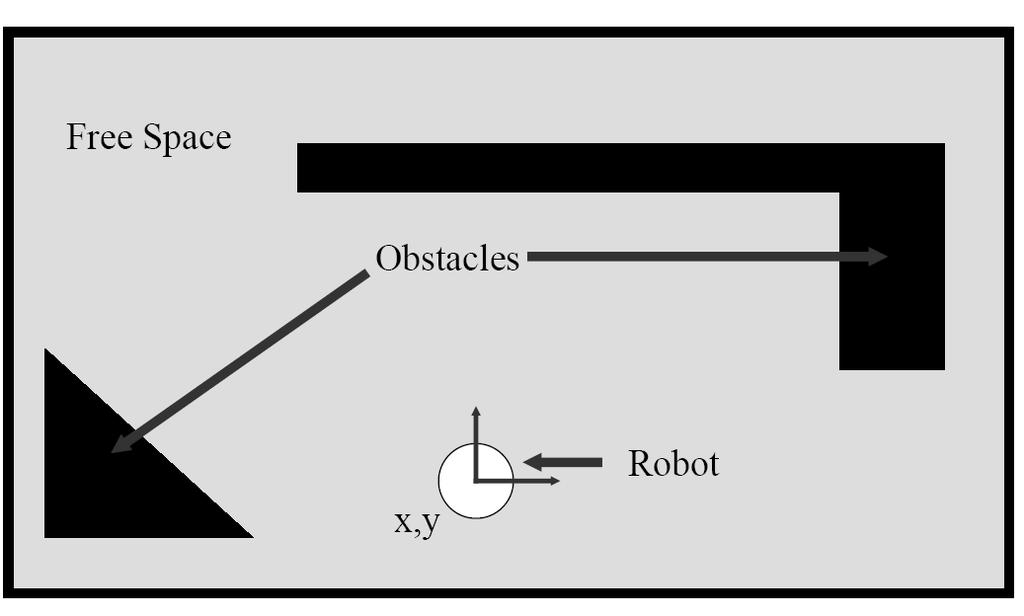
31 Obstacles in C-Space A configuration q is collision-free, or free, if the robot placed at q has null intersection with the obstacles in the workspace The free space F is the set of free configurations A C-obstacle is the set of configurations where the robot collides with a given workspace obstacle A configuration is semi-free if the robot at this configuration touches obstacles without overlap


32 Disc Robot in 2-D Workspace

33 Rigid Robot Translating in 2-D CB = B A = {b-a a A, b B} b1-a1 b1 a1
34 Linear-Time Computation of C-Obstacle in 2-D (convex polygons)


35 Rigid Robot Translating and Rotating in 2-D
36 Free and Semi-Free Paths A free path lies entirely in the free space F A semi-free path lies entirely in the semi-free space
37 Remarks on Free-Space Topology The robot and the obstacles are modeled as closed subsets, meaning that they contain their boundaries One can show that the C-obstacles are closed subsets of the configuration space C as well Consequently, the free space F is an open subset of C. Hence, each free configuration is the center of a ball of non-zero radius entirely contained in F The semi-free space is a closed subset of C. Its boundary is a superset of the boundary of F
38
39
40 Notion of Homotopic Paths Two paths with the same endpoints are homotopic if one can be continuously deformed into the other R x S 1 example: t 1 and t 2 are homotopic t 1 and t 3 are not homotopic q In this example, infinity of homotopy classes t 3 t 1 t 2 q
41 Connectedness of C-Space C is connected if every two configurations can be connected by a path C is simply-connected if any two paths connecting the same endpoints are homotopic Examples: R 2 or R 3 Otherwise C is multiply-connected Examples: S 1 and SO(3) are multiply- connected: - In S 1, infinity of homotopy classes - In SO(3), only two homotopy classes

42 Classes of Homotopic Free Paths
43 Probabilistic Roadmaps PRMs
44 Rapidly-exploring Random Trees A point P in C is randomly chosen. The nearest vertex in the RRT is selected. A new edge is added from this vertex in the direction of P, at distance. The further the algorithm goes, the more space is covered.
45 Rapidly-expanding Random Trees Starting vertex
46 Rapidly-expanding Random Trees Vertex randomly drawn
47 Rapidly-expanding Random Trees Nearest vertex
48 Rapidly-expanding Random Trees New vertex The vertex is in Cfree
49 Rapidly-expanding Random Trees Vertex randomly drawn
50 Rapidly-expanding Random Trees Nearest point
51 Rapidly-expanding Random Trees The vertex is in Cfree New vertex
52 Rapidly-expanding Random Trees
53 Rapidly-expanding Random Trees Vertex randomly drawn
54 Rapidly-expanding Random Trees Nearest vertex
55 Rapidly-expanding Random Trees New vertex
56 Rapidly-expanding Random Trees And it continues
57 RRT-Connect We grow two trees, one from the beginning vertex and another from the end vertex Each time we create a new vertex, we try to greedily connect the two trees
58 Start RRT-Connect: example Goal
59 RRT-Connect: example Random vertex
60 RRT-Connect: example
61 RRT-Connect: example We greedily connect the bottom tree to our new vertex
62 RRT-Connect: example
63 RRT-Connect: example
64 RRT-Connect: example
65 RRT-Connect: example Obstacle found!
66 RRT-Connect: example Now we swap roles!
67 RRT-Connect: example Now we swap roles!
68 RRT-Connect: example We grow the bottom tree
69 RRT-Connect: example Now we greedily try to connect And we continue
70 RRT-Connect: example
71 RRT-Connect: example
72 RRT-Connect: example
73 RRT-Connect: example
74 RRT-Connect: example
75 RRT-Connect: example
76 RRT-Connect: example
77 RRT-Connect: example
78 RRT-Connect: example
79 RRT-Connect: example
80 RRT-Connect: example
81 RRT-Connect: example
82 RRT-Connect: example
83 RRT-Connect: example
84 RRT-Connect: example
85 RRT-Connect: example
86 RRT-Connect: example
87 RRT-Connect: example
88 RRT-Connect: example
89 RRT-Connect: example
90 RRT-Connect: example
91 RRT-Connect: example Connection made!
92 RRT-Connect: example Now we have a solution!
93 RRT-Connect: example Last step: path smoothing
94 RRT-Connect: example Last step: path smoothing

95 An RRT in 2D Example from:

96 A Puzzle solved using RRTs The goal is the separate the two bars from each other. You might have seen a puzzle like this before. The example was constructed by Boris Yamrom, GE Corporate Research & Development Center, and posted as a research benchmark by Nancy Amato at Texas A&M University. It has been cited in many places as a one of the most challenging motion planning examples. In 2001, it was solved by using a balanced bidirectional RRT, developed by James Kuffner and Steve LaValle. There are no special heuristics or parameters that were tuned specifically for this problem. On a current PC (circa 2003), it consistently takes a few minutes to solve.

97 Lunar Landing The following is an open loop trajectory that was planned in a 12-dimensional state space. The video shows an X-Wing fighter that must fly through structures on a lunar base before entering the hangar. This result was presented by CSCE-774 Steve LaValle Robotic Systems and James Kuffner at the Workshop on the Algorithmic Foundations of Robotics, 2000.
Sampling-based Planning 2
 RBE MOTION PLANNING Sampling-based Planning 2 Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Problem with KD-tree RBE MOTION PLANNING Curse of dimension
RBE MOTION PLANNING Sampling-based Planning 2 Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Problem with KD-tree RBE MOTION PLANNING Curse of dimension
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Motion Planning 1 Retraction and Cell Decomposition
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
Part I Part 1 Sampling-based Motion Planning
 Overview of the Lecture Randomized Sampling-based Motion Planning Methods Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 05 B4M36UIR
Overview of the Lecture Randomized Sampling-based Motion Planning Methods Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 05 B4M36UIR
Part I Part 1 Sampling-based Motion Planning
 Overview of the Lecture Randomized Sampling-based Motion Planning Methods Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 06 B4M36UIR
Overview of the Lecture Randomized Sampling-based Motion Planning Methods Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 06 B4M36UIR
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
Search Spaces I. Before we get started... ME/CS 132b Advanced Robotics: Navigation and Perception 4/05/2011
 Search Spaces I b Advanced Robotics: Navigation and Perception 4/05/2011 1 Before we get started... Website updated with Spring quarter grading policy 30% homework, 20% lab, 50% course project Website
Search Spaces I b Advanced Robotics: Navigation and Perception 4/05/2011 1 Before we get started... Website updated with Spring quarter grading policy 30% homework, 20% lab, 50% course project Website
Lecture 3: Motion Planning (cont.)
") CS 294-115 Algorithmic Human-Robot Interaction Fall 2016 Lecture 3: Motion Planning (cont.) Scribes: Molly Nicholas, Chelsea Zhang 3.1 Previously in class... Recall that we defined configuration spaces.
CS 294-115 Algorithmic Human-Robot Interaction Fall 2016 Lecture 3: Motion Planning (cont.) Scribes: Molly Nicholas, Chelsea Zhang 3.1 Previously in class... Recall that we defined configuration spaces.
Motion Planning. COMP3431 Robot Software Architectures
 Motion Planning COMP3431 Robot Software Architectures Motion Planning Task Planner can tell the robot discrete steps but can t say how to execute them Discrete actions must be turned into operations in
Motion Planning COMP3431 Robot Software Architectures Motion Planning Task Planner can tell the robot discrete steps but can t say how to execute them Discrete actions must be turned into operations in
Planning & Decision-making in Robotics Planning Representations/Search Algorithms: RRT, RRT-Connect, RRT*
 16-782 Planning & Decision-making in Robotics Planning Representations/Search Algorithms: RRT, RRT-Connect, RRT* Maxim Likhachev Robotics Institute Carnegie Mellon University Probabilistic Roadmaps (PRMs)
16-782 Planning & Decision-making in Robotics Planning Representations/Search Algorithms: RRT, RRT-Connect, RRT* Maxim Likhachev Robotics Institute Carnegie Mellon University Probabilistic Roadmaps (PRMs)
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Introduction to State-of-the-art Motion Planning Algorithms. Presented by Konstantinos Tsianos
 Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Lecture 3: Motion Planning 2
 CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
6.3 Poincare's Theorem
 Figure 6.5: The second cut. for some g 0. 6.3 Poincare's Theorem Theorem 6.3.1 (Poincare). Let D be a polygon diagram drawn in the hyperbolic plane such that the lengths of its edges and the interior angles
Figure 6.5: The second cut. for some g 0. 6.3 Poincare's Theorem Theorem 6.3.1 (Poincare). Let D be a polygon diagram drawn in the hyperbolic plane such that the lengths of its edges and the interior angles
A Flavor of Topology. Shireen Elhabian and Aly A. Farag University of Louisville January 2010
 A Flavor of Topology Shireen Elhabian and Aly A. Farag University of Louisville January 2010 In 1670 s I believe that we need another analysis properly geometric or linear, which treats place directly
A Flavor of Topology Shireen Elhabian and Aly A. Farag University of Louisville January 2010 In 1670 s I believe that we need another analysis properly geometric or linear, which treats place directly
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Road Map Methods. Including material from Howie Choset / G.D. Hager S. Leonard
 Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
for Motion Planning RSS Lecture 10 Prof. Seth Teller
 Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Workspace-Guided Rapidly-Exploring Random Tree Method for a Robot Arm
 WorkspaceGuided RapidlyExploring Random Tree Method for a Robot Arm Jaesik Choi choi31@cs.uiuc.edu August 12, 2007 Abstract Motion planning for robotic arms is important for real, physical world applications.
WorkspaceGuided RapidlyExploring Random Tree Method for a Robot Arm Jaesik Choi choi31@cs.uiuc.edu August 12, 2007 Abstract Motion planning for robotic arms is important for real, physical world applications.
Motion Planning: Probabilistic Roadmaps. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning: Probabilistic Roadmaps Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dalla lezione: Basic Motion Planning for a Point Robot CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm
Motion Planning: Probabilistic Roadmaps Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dalla lezione: Basic Motion Planning for a Point Robot CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Motion Planning 2D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Homework #2 Posted: February 8 Due: February 15
 CS26N Motion Planning for Robots, Digital Actors and Other Moving Objects (Winter 2012) Homework #2 Posted: February 8 Due: February 15 How to complete this HW: First copy this file; then type your answers
CS26N Motion Planning for Robots, Digital Actors and Other Moving Objects (Winter 2012) Homework #2 Posted: February 8 Due: February 15 How to complete this HW: First copy this file; then type your answers
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Visual Navigation for Flying Robots. Motion Planning
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Human-Oriented Robotics. Robot Motion Planning. Kai Arras Social Robotics Lab, University of Freiburg
 Robot Motion Planning Kai Arras, University of Freiburg 1 Contents Introduction Configuration space Combinatorial planning Sampling-based planning Potential fields methods A, Any-Angle A, D/D Lite Dynamic
Robot Motion Planning Kai Arras, University of Freiburg 1 Contents Introduction Configuration space Combinatorial planning Sampling-based planning Potential fields methods A, Any-Angle A, D/D Lite Dynamic
Motion Planning. Jana Kosecka Department of Computer Science
 Motion Planning Jana Kosecka Department of Computer Science Discrete planning, graph search, shortest path, A* methods Road map methods Configuration space Slides thanks to http://cs.cmu.edu/~motionplanning,
Motion Planning Jana Kosecka Department of Computer Science Discrete planning, graph search, shortest path, A* methods Road map methods Configuration space Slides thanks to http://cs.cmu.edu/~motionplanning,
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Manifolds Pt. 1. PHYS Southern Illinois University. August 24, 2016
 Manifolds Pt. 1 PHYS 500 - Southern Illinois University August 24, 2016 PHYS 500 - Southern Illinois University Manifolds Pt. 1 August 24, 2016 1 / 20 Motivating Example: Pendulum Example Consider a pendulum
Manifolds Pt. 1 PHYS 500 - Southern Illinois University August 24, 2016 PHYS 500 - Southern Illinois University Manifolds Pt. 1 August 24, 2016 1 / 20 Motivating Example: Pendulum Example Consider a pendulum
Path Deformation Roadmaps
 Path Deformation Roadmaps Léonard Jaillet and Thierry Siméon LAAS-CNRS, Toulouse, France, {ljaillet,nic}@laas.fr Abstract: This paper describes a new approach to sampling-based motion planning with PRM
Path Deformation Roadmaps Léonard Jaillet and Thierry Siméon LAAS-CNRS, Toulouse, France, {ljaillet,nic}@laas.fr Abstract: This paper describes a new approach to sampling-based motion planning with PRM
Geometric structures on manifolds
 CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
Motion Planning for Humanoid Robots
 Motion Planning for Humanoid Robots Presented by: Li Yunzhen What is Humanoid Robots & its balance constraints? Human-like Robots A configuration q is statically-stable if the projection of mass center
Motion Planning for Humanoid Robots Presented by: Li Yunzhen What is Humanoid Robots & its balance constraints? Human-like Robots A configuration q is statically-stable if the projection of mass center
Offline and Online Evolutionary Bi-Directional RRT Algorithms for Efficient Re-Planning in Environments with Moving Obstacles
 Offline and Online Evolutionary Bi-Directional RRT Algorithms for Efficient Re-Planning in Environments with Moving Obstacles Sean R. Martin, Steve E. Wright, and John W. Sheppard, Fellow, IEEE Abstract
Offline and Online Evolutionary Bi-Directional RRT Algorithms for Efficient Re-Planning in Environments with Moving Obstacles Sean R. Martin, Steve E. Wright, and John W. Sheppard, Fellow, IEEE Abstract
Chapter 4 Concepts from Geometry
 Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
Potential Function. Homework #3. Part I: Star Algorithm
 Homework #3 Potential Function Part I: Star Algorithm I have implemented the Star Algorithm to compute the 2-dimensional configuration space Q starting from the workspace W and the robot shape R. The obstacles
Homework #3 Potential Function Part I: Star Algorithm I have implemented the Star Algorithm to compute the 2-dimensional configuration space Q starting from the workspace W and the robot shape R. The obstacles
Sampling-Based Motion Planning
 Sampling-Based Motion Planning Pieter Abbeel UC Berkeley EECS Many images from Lavalle, Planning Algorithms Motion Planning Problem Given start state x S, goal state x G Asked for: a sequence of control
Sampling-Based Motion Planning Pieter Abbeel UC Berkeley EECS Many images from Lavalle, Planning Algorithms Motion Planning Problem Given start state x S, goal state x G Asked for: a sequence of control
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222)
") 2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
CS 763 F16. Moving objects in space with obstacles/constraints.
 Moving objects in space with obstacles/constraints. Objects = robots, vehicles, jointed linkages (robot arm), tools (e.g. on automated assembly line), foldable/bendable objects. Objects need not be physical
Moving objects in space with obstacles/constraints. Objects = robots, vehicles, jointed linkages (robot arm), tools (e.g. on automated assembly line), foldable/bendable objects. Objects need not be physical
Sampling-Based Robot Motion Planning. Lydia Kavraki Department of Computer Science Rice University Houston, TX USA
 Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,!
 Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
Path Planning among Movable Obstacles: a Probabilistically Complete Approach
 Path Planning among Movable Obstacles: a Probabilistically Complete Approach Jur van den Berg 1, Mike Stilman 2, James Kuffner 3, Ming Lin 1, and Dinesh Manocha 1 1 Department of Computer Science, University
Path Planning among Movable Obstacles: a Probabilistically Complete Approach Jur van den Berg 1, Mike Stilman 2, James Kuffner 3, Ming Lin 1, and Dinesh Manocha 1 1 Department of Computer Science, University
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Final Exam, F11PE Solutions, Topology, Autumn 2011
 Final Exam, F11PE Solutions, Topology, Autumn 2011 Question 1 (i) Given a metric space (X, d), define what it means for a set to be open in the associated metric topology. Solution: A set U X is open if,
Final Exam, F11PE Solutions, Topology, Autumn 2011 Question 1 (i) Given a metric space (X, d), define what it means for a set to be open in the associated metric topology. Solution: A set U X is open if,
Factor-Guided Motion Planning for a Robot Arm
 Factor-Guided Motion Planning for a Robot Arm Jaesik Choi and Eyal Amir Computer Science Department University of Illinois at Urbana-Champaign Urbana, IL 61801 {choi31,eyal}@cs.uiuc.edu Abstract Motion
Factor-Guided Motion Planning for a Robot Arm Jaesik Choi and Eyal Amir Computer Science Department University of Illinois at Urbana-Champaign Urbana, IL 61801 {choi31,eyal}@cs.uiuc.edu Abstract Motion
Star-shaped Roadmaps - A Deterministic Sampling Approach for Complete Motion Planning
 Star-shaped Roadmaps - A Deterministic Sampling Approach for Complete Motion Planning Gokul Varadhan Dinesh Manocha University of North Carolina at Chapel Hill http://gamma.cs.unc.edu/motion/ Email: {varadhan,dm}@cs.unc.edu
Star-shaped Roadmaps - A Deterministic Sampling Approach for Complete Motion Planning Gokul Varadhan Dinesh Manocha University of North Carolina at Chapel Hill http://gamma.cs.unc.edu/motion/ Email: {varadhan,dm}@cs.unc.edu
Topological Data Analysis - I. Afra Zomorodian Department of Computer Science Dartmouth College
 Topological Data Analysis - I Afra Zomorodian Department of Computer Science Dartmouth College September 3, 2007 1 Acquisition Vision: Images (2D) GIS: Terrains (3D) Graphics: Surfaces (3D) Medicine: MRI
Topological Data Analysis - I Afra Zomorodian Department of Computer Science Dartmouth College September 3, 2007 1 Acquisition Vision: Images (2D) GIS: Terrains (3D) Graphics: Surfaces (3D) Medicine: MRI
1 Euler characteristics
 Tutorials: MA342: Tutorial Problems 2014-15 Tuesday, 1-2pm, Venue = AC214 Wednesday, 2-3pm, Venue = AC201 Tutor: Adib Makroon 1 Euler characteristics 1. Draw a graph on a sphere S 2 PROBLEMS in such a
Tutorials: MA342: Tutorial Problems 2014-15 Tuesday, 1-2pm, Venue = AC214 Wednesday, 2-3pm, Venue = AC201 Tutor: Adib Makroon 1 Euler characteristics 1. Draw a graph on a sphere S 2 PROBLEMS in such a
15-494/694: Cognitive Robotics
 15-494/694: Cognitive Robotics Dave Touretzky Lecture 9: Path Planning with Rapidly-exploring Random Trees Navigating with the Pilot Image from http://www.futuristgerd.com/2015/09/10 Outline How is path
15-494/694: Cognitive Robotics Dave Touretzky Lecture 9: Path Planning with Rapidly-exploring Random Trees Navigating with the Pilot Image from http://www.futuristgerd.com/2015/09/10 Outline How is path
Retraction-Based RRT Planner for Articulated Models
 Retraction-Based RRT Planner for Articulated Models Jia Pan 1 and Liangjun Zhang 2 and Dinesh Manocha 3 1 panj@cs.unc.edu, 3 dm@cs.unc.edu, Dept. of Computer Science, University of North Carolina at Chapel
Retraction-Based RRT Planner for Articulated Models Jia Pan 1 and Liangjun Zhang 2 and Dinesh Manocha 3 1 panj@cs.unc.edu, 3 dm@cs.unc.edu, Dept. of Computer Science, University of North Carolina at Chapel
Geometric structures on manifolds
 CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
CS Path Planning
 Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
II. RELATED WORK. A. Probabilistic roadmap path planner
 Gaussian PRM Samplers for Dynamic Configuration Spaces Yu-Te Lin and Shih-Chia Cheng Computer Science Department Stanford University Stanford, CA 94305, USA {yutelin, sccheng}@cs.stanford.edu SUID: 05371954,
Gaussian PRM Samplers for Dynamic Configuration Spaces Yu-Te Lin and Shih-Chia Cheng Computer Science Department Stanford University Stanford, CA 94305, USA {yutelin, sccheng}@cs.stanford.edu SUID: 05371954,
Hyperbolic structures and triangulations
 CHAPTER Hyperbolic structures and triangulations In chapter 3, we learned that hyperbolic structures lead to developing maps and holonomy, and that the developing map is a covering map if and only if the
CHAPTER Hyperbolic structures and triangulations In chapter 3, we learned that hyperbolic structures lead to developing maps and holonomy, and that the developing map is a covering map if and only if the
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization
 Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Probabilistic Motion Planning: Algorithms and Applications
 Probabilistic Motion Planning: Algorithms and Applications Jyh-Ming Lien Department of Computer Science George Mason University Motion Planning in continuous spaces (Basic) Motion Planning (in a nutshell):
Probabilistic Motion Planning: Algorithms and Applications Jyh-Ming Lien Department of Computer Science George Mason University Motion Planning in continuous spaces (Basic) Motion Planning (in a nutshell):
Non-holonomic Planning
 Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Hot topics and Open problems in Computational Geometry. My (limited) perspective. Class lecture for CSE 546,
 perspective. Class lecture for CSE 546,") Hot topics and Open problems in Computational Geometry. My (limited) perspective Class lecture for CSE 546, 2-13-07 Some slides from this talk are from Jack Snoeyink and L. Kavrakis Key trends on Computational
Hot topics and Open problems in Computational Geometry. My (limited) perspective Class lecture for CSE 546, 2-13-07 Some slides from this talk are from Jack Snoeyink and L. Kavrakis Key trends on Computational
Math 734 Aug 22, Differential Geometry Fall 2002, USC
 Math 734 Aug 22, 2002 1 Differential Geometry Fall 2002, USC Lecture Notes 1 1 Topological Manifolds The basic objects of study in this class are manifolds. Roughly speaking, these are objects which locally
Math 734 Aug 22, 2002 1 Differential Geometry Fall 2002, USC Lecture Notes 1 1 Topological Manifolds The basic objects of study in this class are manifolds. Roughly speaking, these are objects which locally
Introduction to geometry
 1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
Topology of Surfaces
 EM225 Topology of Surfaces Geometry and Topology In Euclidean geometry, the allowed transformations are the so-called rigid motions which allow no distortion of the plane (or 3-space in 3 dimensional geometry).
EM225 Topology of Surfaces Geometry and Topology In Euclidean geometry, the allowed transformations are the so-called rigid motions which allow no distortion of the plane (or 3-space in 3 dimensional geometry).
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
Simplicial Hyperbolic Surfaces
 Simplicial Hyperbolic Surfaces Talk by Ken Bromberg August 21, 2007 1-Lipschitz Surfaces- In this lecture we will discuss geometrically meaningful ways of mapping a surface S into a hyperbolic manifold
Simplicial Hyperbolic Surfaces Talk by Ken Bromberg August 21, 2007 1-Lipschitz Surfaces- In this lecture we will discuss geometrically meaningful ways of mapping a surface S into a hyperbolic manifold
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
LQR-RRT : Optimal Sampling-Based Motion Planning with Automatically Derived Extension Heuristics
 LQR-RRT : Optimal Sampling-Based Motion Planning with Automatically Derived Extension Heuristics Alejandro Perez, Robert Platt Jr., George Konidaris, Leslie Kaelbling and Tomas Lozano-Perez Computer Science
LQR-RRT : Optimal Sampling-Based Motion Planning with Automatically Derived Extension Heuristics Alejandro Perez, Robert Platt Jr., George Konidaris, Leslie Kaelbling and Tomas Lozano-Perez Computer Science
Hybrid Probabilistic RoadMap - Monte Carlo Motion Planning for Closed Chain Systems with Spherical Joints
 Hybrid Probabilistic RoadMap - Monte Carlo Motion Planning for Closed Chain Systems with Spherical Joints Li Han Dept. of Mathematics and Computer Science Clark University Worcester, MA 01610 Email: lhan@clarku.edu
Hybrid Probabilistic RoadMap - Monte Carlo Motion Planning for Closed Chain Systems with Spherical Joints Li Han Dept. of Mathematics and Computer Science Clark University Worcester, MA 01610 Email: lhan@clarku.edu
Path Planning. Jacky Baltes Dept. of Computer Science University of Manitoba 11/21/10
 Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Introduction to Intelligent System ( , Fall 2017) Instruction for Assignment 2 for Term Project. Rapidly-exploring Random Tree and Path Planning
 Instruction for Assignment 2 for Term Project. Rapidly-exploring Random Tree and Path Planning") Instruction for Assignment 2 for Term Project Rapidly-exploring Random Tree and Path Planning Introduction The objective of this semester s term project is to implement a path planning algorithm for a
Instruction for Assignment 2 for Term Project Rapidly-exploring Random Tree and Path Planning Introduction The objective of this semester s term project is to implement a path planning algorithm for a
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
Motion Planning with Monte Carlo Random Walks. Weifeng Chen
 Motion Planning with Monte Carlo Random Walks by Weifeng Chen A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Department of Computing Science University
Motion Planning with Monte Carlo Random Walks by Weifeng Chen A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Department of Computing Science University
Principles of Robot Motion
 Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
Planar Graphs. 1 Graphs and maps. 1.1 Planarity and duality
 Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Lecture 7: Jan 31, Some definitions related to Simplical Complex. 7.2 Topological Equivalence and Homeomorphism
 CS 6170 Computational Topology: Topological Data Analysis University of Utah Spring 2017 School of Computing Lecture 7: Jan 31, 2017 Lecturer: Prof. Bei Wang Scribe: Avani Sharma,
CS 6170 Computational Topology: Topological Data Analysis University of Utah Spring 2017 School of Computing Lecture 7: Jan 31, 2017 Lecturer: Prof. Bei Wang Scribe: Avani Sharma,
Learning Humanoid Reaching Tasks in Dynamic Environments
 Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 TuD3.5 Learning Humanoid Reaching Tasks in Dynamic Environments Xiaoxi
Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 TuD3.5 Learning Humanoid Reaching Tasks in Dynamic Environments Xiaoxi
FACOLTÀ DI INGEGNERIA DELL INFORMAZIONE ELECTIVE IN ROBOTICS. Quadrotor. Motion Planning Algorithms. Academic Year
 FACOLTÀ DI INGEGNERIA DELL INFORMAZIONE ELECTIVE IN ROBOTICS Quadrotor Motion Planning Algorithms Prof. Marilena Vendittelli Prof. Jean-Paul Laumond Jacopo Capolicchio Riccardo Spica Academic Year 2010-2011
FACOLTÀ DI INGEGNERIA DELL INFORMAZIONE ELECTIVE IN ROBOTICS Quadrotor Motion Planning Algorithms Prof. Marilena Vendittelli Prof. Jean-Paul Laumond Jacopo Capolicchio Riccardo Spica Academic Year 2010-2011
T S. Configuration Space S1 LP S0 ITM. S3 Start cfg
 An Adaptive Framework for `Single Shot' Motion Planning Λ Daniel R. Vallejo Christopher Jones Nancy M. Amato Texas A&M University Sandia National Laboratories Texas A&M University dvallejo@cs.tamu.edu
An Adaptive Framework for `Single Shot' Motion Planning Λ Daniel R. Vallejo Christopher Jones Nancy M. Amato Texas A&M University Sandia National Laboratories Texas A&M University dvallejo@cs.tamu.edu
Introduction to robot algorithms CSE 410/510
 Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Lecture 18 Kinematic Chains
 CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
Lectures on topology. S. K. Lando
 Lectures on topology S. K. Lando Contents 1 Reminder 2 1.1 Topological spaces and continuous mappings.......... 3 1.2 Examples............................. 4 1.3 Properties of topological spaces.................
Lectures on topology S. K. Lando Contents 1 Reminder 2 1.1 Topological spaces and continuous mappings.......... 3 1.2 Examples............................. 4 1.3 Properties of topological spaces.................
Nonholonomic motion planning for car-like robots
 Nonholonomic motion planning for car-like robots A. Sánchez L. 2, J. Abraham Arenas B. 1, and René Zapata. 2 1 Computer Science Dept., BUAP Puebla, Pue., México {aarenas}@cs.buap.mx 2 LIRMM, UMR5506 CNRS,
Nonholonomic motion planning for car-like robots A. Sánchez L. 2, J. Abraham Arenas B. 1, and René Zapata. 2 1 Computer Science Dept., BUAP Puebla, Pue., México {aarenas}@cs.buap.mx 2 LIRMM, UMR5506 CNRS,
Topic: Orientation, Surfaces, and Euler characteristic
 Topic: Orientation, Surfaces, and Euler characteristic The material in these notes is motivated by Chapter 2 of Cromwell. A source I used for smooth manifolds is do Carmo s Riemannian Geometry. Ideas of
Topic: Orientation, Surfaces, and Euler characteristic The material in these notes is motivated by Chapter 2 of Cromwell. A source I used for smooth manifolds is do Carmo s Riemannian Geometry. Ideas of
Path Planning. Ioannis Rekleitis
 Path Planning Ioannis Rekleitis Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2 Mo+on Planning The ability to go from A to B
Path Planning Ioannis Rekleitis Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2 Mo+on Planning The ability to go from A to B
f-v v-f f-e e-f f-f e-e-cross e-v v-e degenerate PCs e-e-touch v-v
 Planning Motion Compliant to Complex Contact States Λ uerong Ji, Jing iao Computer Science Department University of North Carolina - Charlotte Charlotte, NC 28223, US xji@uncc.edu, xiao@uncc.edu bstract
Planning Motion Compliant to Complex Contact States Λ uerong Ji, Jing iao Computer Science Department University of North Carolina - Charlotte Charlotte, NC 28223, US xji@uncc.edu, xiao@uncc.edu bstract
Planning with Reachable Distances: Fast Enforcement of Closure Constraints
 Planning with Reachable Distances: Fast Enforcement of Closure Constraints Xinyu Tang Shawna Thomas Nancy M. Amato xinyut@cs.tamu.edu sthomas@cs.tamu.edu amato@cs.tamu.edu Technical Report TR6-8 Parasol
Planning with Reachable Distances: Fast Enforcement of Closure Constraints Xinyu Tang Shawna Thomas Nancy M. Amato xinyut@cs.tamu.edu sthomas@cs.tamu.edu amato@cs.tamu.edu Technical Report TR6-8 Parasol
Workspace Skeleton Tools for Motion Planning
 Workspace Skeleton Tools for Motion Planning Kiffany Lyons, Diego Ruvalcaba, Mukulika Ghosh, Shawna Thomas, and Nancy Amato Abstract Motion planning is the ability to find a valid path from a start to
Workspace Skeleton Tools for Motion Planning Kiffany Lyons, Diego Ruvalcaba, Mukulika Ghosh, Shawna Thomas, and Nancy Amato Abstract Motion planning is the ability to find a valid path from a start to
Motion Planning, Part III Graph Search, Part I. Howie Choset
 Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Final Report: Dynamic Dubins-curve based RRT Motion Planning for Differential Constrain Robot
 Final Report: Dynamic Dubins-curve based RRT Motion Planning for Differential Constrain Robot Abstract This project develops a sample-based motion-planning algorithm for robot with differential constraints.
Final Report: Dynamic Dubins-curve based RRT Motion Planning for Differential Constrain Robot Abstract This project develops a sample-based motion-planning algorithm for robot with differential constraints.
Efficient Interference Calculation by Tight Bounding Volumes
 Efficient Interference Calculation by Tight Bounding Volumes Masatake Higashi, Yasuyuki Suzuki, Takeshi Nogawa, Yoichi Sano, and Masakazu Kobayashi Mechanical Systems Engineering Division, Toyota Technological
Efficient Interference Calculation by Tight Bounding Volumes Masatake Higashi, Yasuyuki Suzuki, Takeshi Nogawa, Yoichi Sano, and Masakazu Kobayashi Mechanical Systems Engineering Division, Toyota Technological
Motion Planning For Steerable Needles in 3D Environments with Obstacles Using Rapidly-Exploring Random Trees and Backchaining
 Motion Planning For Steerable Needles in 3D Environments with Obstacles Using Rapidly-Exploring Random Trees and Backchaining Jijie Xu, Vincent Duindam, Ron Alterovitz, and Ken Goldberg Abstract Steerable
Motion Planning For Steerable Needles in 3D Environments with Obstacles Using Rapidly-Exploring Random Trees and Backchaining Jijie Xu, Vincent Duindam, Ron Alterovitz, and Ken Goldberg Abstract Steerable