Introduction to Computer Vision
|
|
|
- Ralf Russell
- 5 years ago
- Views:
Transcription
1 Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2
2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth read hourly - read ever few hours Office Hours: 1:00 to 2:30, Tuesday HP :00 to 11:30, Thursday HP5331 TA: Anthony D Angelo marks the assignments under my supervision, while I mark the two midterms. Course website: Linked from Lectures in pdf have a version number, so you can check for updates which are periodic
3 Course Organization Textbook: Introductory Techniques for 3-D Computer Vision, by Trucco and Verri No longer in print, CD has scanned chapters Also contains SzeliskiBook_ _draft which will be used for some of the course (to be decided) Two parts: Part I (Before Feb. break) Introduction, Review of linear algebra, Image formation, Image processing, Edge detection, Corner detection. Part II (After Feb. break) Camera calibration, Homography, Correspondence, Stereo, Epipolar geometry, Active sensors
4 Evaluation Four or five assignments (40%) -two before break and two after -three or four of them will involve programming -submit via CuLearn or put in the dropbox at 3115 HP (or me) Two mid-terms (60% - 30% each) -one just before reading week break, one at end of term (just before the exam period) -will cover material up to that point, so once tested material in first part is not tested again
5 What is Computer Vision? The goal of computer vision is to develop algorithms that allow computer to see. Computer vision is sometimes called the inverse problem of computer graphics Also called Image Understanding Image Analysis Machine Vision

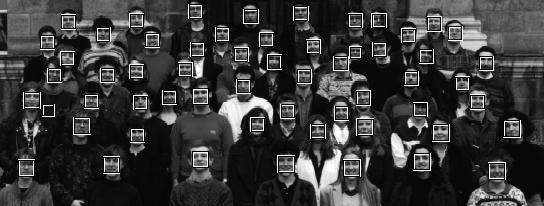
6 General visual perception is hard

7 Digital Image
8 A brief history of computer vision 1960s - started as a student summer project at MIT. 1970s and 80s part of AI understanding human vision and emulating human perception. 1990s depart from AI, geometric approach. Today various mathematical methods (statistics, differential equations, optimization), applications (security, robotics, graphics). Many applications of computer vision are now in common usage
9 What is Computer Vision? Trucco & Verri: Computing properties of the 3-D world from one or more digital images. Properties: mainly physical (geometric, dynamic, etc.) One common definition: Computer vision is inverse optics or inverse graphics.
10 Related fields Image Processing Generates one image from another i.e. sharpen Pattern Recognition Learn patterns for classifying or analyzing data i.e. character recognition Photogrammetry Measures 3d quantities from multiple 2d images i.e. model building Computer graphics Take a virtual scene and render it i.e. gaming Human/Computer Interfaces Ways of interacting between a computer and a human i.e. kinect for xbox
11 Our Time It is a good time to do computer vision now, because: Powerful computers (Nvidia X1 1 teralflop) Inexpensive cameras Algorithm improvements Understanding of vision systems Modern computer networks Cameras everywhere Including mobile devices However one problem! Doing anything reliably is very difficult!
12 Human Computer Interfaces Microsoft Kinect camera Uses infrared projected patterns Single camera sees these and computes 3d data Basically depth values on top of image pixel values 3d depth data is easier to use than 2d At least for applications such as motion detection Can detect motion of a person (including arms/legs) Use this motion information to control game A more complex input device than the Wii Wii also uses computer vision technology

13 Typical structure light system

14 Kinect system

15 Kinect system
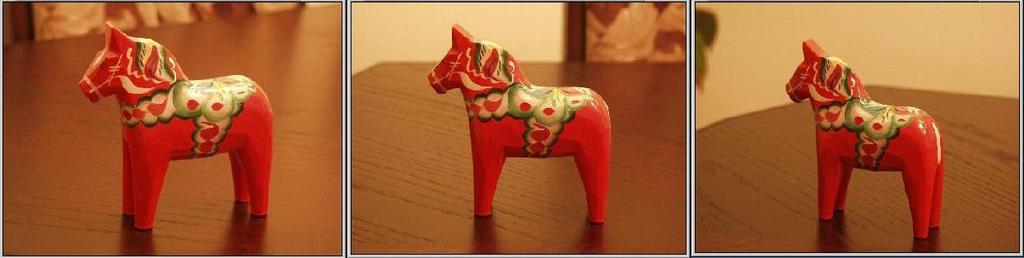

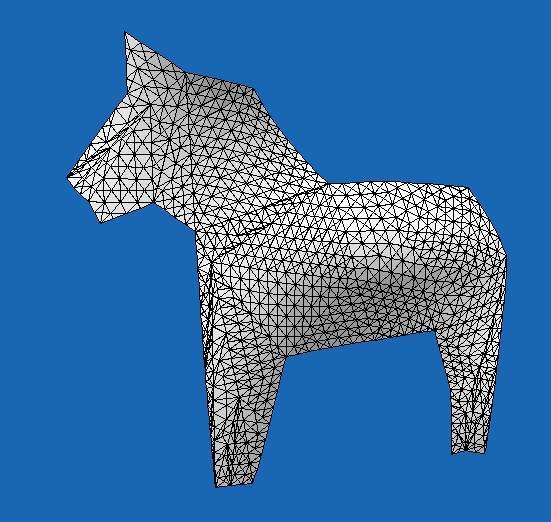
16 3D Reconstruction

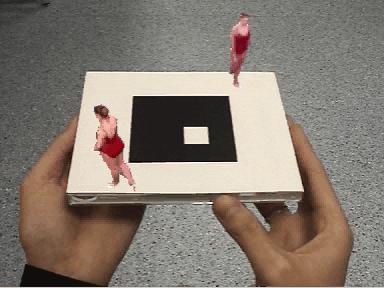
17 Augmented Reality




18 Panoramic Mosaics =

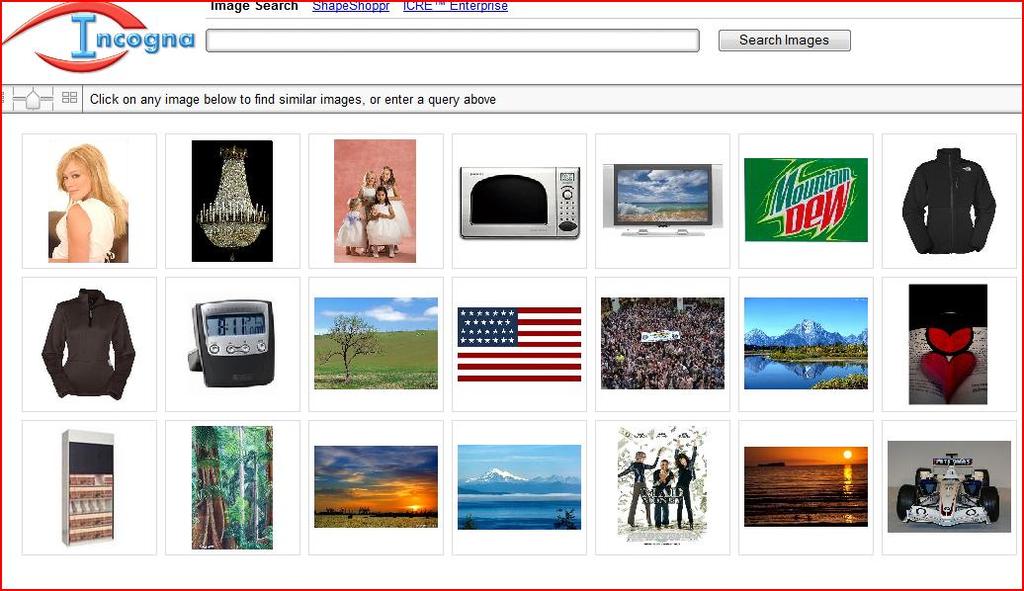
19 Image Search:
20 Applications: Recognition


21 Applications: Special Effects ESC Entertainment, XYZRGB, NRC



22 Applications: Special Effects Andy Serkis, Gollum, Lord of the Rings


23 Motion capture systems Put retro-reflective balls everywhere Track these in real-time to get 3d positions

24 Applications: Medical Imaging
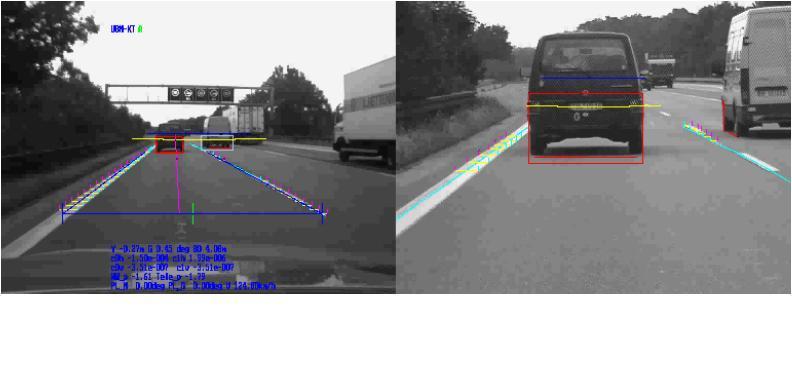

25 Autonomous Vehicle Flakey, SRI

26 Applications: Robotics
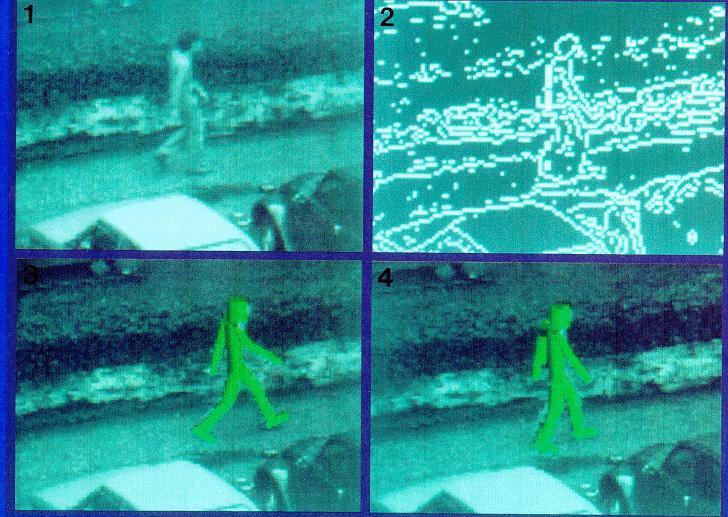

27 Applications: Surveillance

28 Applications: Mobile - ChessOcr

29 Applications: Mobile - ChessOcr

30 Applications: Mobile - CardRecog
31 Mathematical tools Linear algebra Vector calculus Euclidean geometry Projective geometry Differential geometry Differential equations Numerical analysis Probability and statistics
32 Programming tools OpenCV - A universal toolbox for research and development in the field of Computer Vision Widely used OpenSource library written in C/C+ Capable of running in real-time applications OS/hardware/window-manager independent Simple Gui environment with sliders/mouse interaction Routines for a large variety of computer vision algorithms Works on Windows, Linux, Android, and IOS In windows require Visual Studio environment (free for you!) Easiest way to learn is to look at the sample code OpenCV web site has documentation and tutorials There are a number of different versions I have included latest version on your DVD along with instructions
33 OpenCV Functionality Image data manipulation allocation, release, copying, setting, conversion Image and video I/O file and camera based input, image/video file output Matrix and vector manipulation, and linear algebra routines products, solvers, eigenvalues, SVD Various dynamic data structures lists, queues, sets, trees, graphs Basic image processing filtering, edge detection, corner detection, sampling and interpolation, color conversion, morphological operations, histograms, image pyramids 33
34 OpenCV Functionality (cont.) Structural analysis connected components, contour processing, distance transform, various moments, template matching, Hough transform, polygonal approximation, line fitting, ellipse fitting, Delaunay triangulation Camera calibration finding and tracking calibration patterns, calibration, fundamental matrix estimation, homography estimation, stereo correspondence Motion analysis optical flow, motion segmentation, tracking Object recognition eigen-methods, HMM Basic GUI display image/video, keyboard and mouse handling, scroll-bars Image labeling line, conic, polygon, text drawing 34


35 OpenCV Modules OpenCV Functionality more than 350 algorithms Cxcore Data structures and linear algebra support. cv Main OpenCV functions. Cvaux Auxiliary (experimental) OpenCV functions. Highgui GUI functions works on Windows and Linux Very simple to understand and use On mobile devices you must make your own GUI 35
36 Course DVD OpenCV plus lectures Contains OpenCV and an example program along with a copy of the course web site But you should look at course web site for current updates has latest version plus docu But read my notes in the DVD to see easiest approach! Easiest approach is on Windows as below Install some version of Visual Studio (Version 12 is best) Install OpenCV (OpenCV3.0 Beta on DVD) In directory OpenCV example open the sln project file Use X86 or w32 mode, depending on your machine To try out different example programs replace display_image.cpp with the other.cpp and.c files
UNIK 4690 Maskinsyn Introduction
 UNIK 4690 Maskinsyn Introduction 18.01.2018 Trym Vegard Haavardsholm (trym.haavardsholm@its.uio.no) Idar Dyrdal (idar.dyrdal@its.uio.no) Thomas Opsahl (thomasoo@its.uio.no) Ragnar Smestad (ragnar.smestad@ffi.no)
UNIK 4690 Maskinsyn Introduction 18.01.2018 Trym Vegard Haavardsholm (trym.haavardsholm@its.uio.no) Idar Dyrdal (idar.dyrdal@its.uio.no) Thomas Opsahl (thomasoo@its.uio.no) Ragnar Smestad (ragnar.smestad@ffi.no)
Computer Vision. Introduction
 Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
CSCD18: Computer Graphics. Instructor: Leonid Sigal
 CSCD18: Computer Graphics Instructor: Leonid Sigal CSCD18: Computer Graphics Instructor: Leonid Sigal (call me Leon) lsigal@utsc.utoronto.ca www.cs.toronto.edu/~ls/ Office: SW626 Office Hour: M, 12-1pm?
CSCD18: Computer Graphics Instructor: Leonid Sigal CSCD18: Computer Graphics Instructor: Leonid Sigal (call me Leon) lsigal@utsc.utoronto.ca www.cs.toronto.edu/~ls/ Office: SW626 Office Hour: M, 12-1pm?
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Computer Vision, CS766. Staff. Instructor: Li Zhang TA: Jake Rosin
 Computer Vision, CS766 Staff Instructor: Li Zhang lizhang@cs.wisc.edu TA: Jake Rosin rosin@cs.wisc.edu Today Introduction Administrative Stuff Overview of the Course About Me Li Zhang ( 张力 ) Last name
Computer Vision, CS766 Staff Instructor: Li Zhang lizhang@cs.wisc.edu TA: Jake Rosin rosin@cs.wisc.edu Today Introduction Administrative Stuff Overview of the Course About Me Li Zhang ( 张力 ) Last name
Introduction to Computer Vision MARCH 2018
 Introduction to Computer Vision RODNEY DOCKTER, PH.D. MARCH 2018 1 Rodney Dockter (me) Ph.D. in Mechanical Engineering from the University of Minnesota Worked in Dr. Tim Kowalewski s lab Medical robotics
Introduction to Computer Vision RODNEY DOCKTER, PH.D. MARCH 2018 1 Rodney Dockter (me) Ph.D. in Mechanical Engineering from the University of Minnesota Worked in Dr. Tim Kowalewski s lab Medical robotics
CS595:Introduction to Computer Vision
 CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
0. Introduction: What is Computer Graphics? 1. Basics of scan conversion (line drawing) 2. Representing 2D curves
 2. Representing 2D curves") CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~elf Instructor: Eugene Fiume Office: BA 5266 Phone: 416 978 5472 (not a reliable way) Email:
CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~elf Instructor: Eugene Fiume Office: BA 5266 Phone: 416 978 5472 (not a reliable way) Email:
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
stanford hci group / cs377s Lecture 8: OpenCV Dan Maynes-Aminzade Designing Applications that See
 stanford hci group / cs377s Designing Applications that See Lecture 8: OpenCV Dan Maynes-Aminzade 31 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up Assignment
stanford hci group / cs377s Designing Applications that See Lecture 8: OpenCV Dan Maynes-Aminzade 31 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up Assignment
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
ME132 February 3, 2011
 ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
CSc I6716 Spring D Computer Vision. Introduction. Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki
 Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
CS4495/6495 Introduction to Computer Vision. 1A-L1 Introduction
 CS4495/6495 Introduction to Computer Vision 1A-L1 Introduction Outline What is computer vision? State of the art Why is this hard? Course overview Software Why study Computer Vision? Images (and movies)
CS4495/6495 Introduction to Computer Vision 1A-L1 Introduction Outline What is computer vision? State of the art Why is this hard? Course overview Software Why study Computer Vision? Images (and movies)
CSE 455: Computer Vision Winter 2007
 CSE 455: Computer Vision Winter 2007 Instructor: Professor Linda Shapiro (shapiro@cs) Additional Instructor: Dr. Matthew Brown (brown@microsoft.com) TAs: Masa Kobashi (mkbsh@cs) Peter Davis (pediddle@cs)
CSE 455: Computer Vision Winter 2007 Instructor: Professor Linda Shapiro (shapiro@cs) Additional Instructor: Dr. Matthew Brown (brown@microsoft.com) TAs: Masa Kobashi (mkbsh@cs) Peter Davis (pediddle@cs)
Thanks to Chris Bregler. COS 429: Computer Vision
 Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Szymon Rusinkiewicz TA: Linjie Luo smr@cs.princeton.edu linjiel@cs.princeton.edu Course web page http://www.cs.princeton.edu/courses/archive/fall09/cos429/
Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Szymon Rusinkiewicz TA: Linjie Luo smr@cs.princeton.edu linjiel@cs.princeton.edu Course web page http://www.cs.princeton.edu/courses/archive/fall09/cos429/
Expectations. Computer Vision. Grading. Grading. Our Goal. Our Goal
 Computer Vision Expectations Me. Robert Pless pless@cse.wustl.edu 518 Lopata Hall. Office Hours: Thursday 7-8 Virtual Office Hours: Tuesday 3-4 (profpless on AIM, YahooMessenger) Class. CSE 519, Computer
Computer Vision Expectations Me. Robert Pless pless@cse.wustl.edu 518 Lopata Hall. Office Hours: Thursday 7-8 Virtual Office Hours: Tuesday 3-4 (profpless on AIM, YahooMessenger) Class. CSE 519, Computer
CS535: Interactive Computer Graphics
 CS535: Interactive Computer Graphics Instructor: Daniel G. Aliaga (aliaga@cs.purdue.edu, www.cs.purdue.edu/homes/aliaga) Classroom: LWSN B134 Time: MWF @ 1:30-2:20pm Office hours: by appointment (LWSN
CS535: Interactive Computer Graphics Instructor: Daniel G. Aliaga (aliaga@cs.purdue.edu, www.cs.purdue.edu/homes/aliaga) Classroom: LWSN B134 Time: MWF @ 1:30-2:20pm Office hours: by appointment (LWSN
Overview of Computer Vision. CS308 Data Structures
 Overview of Computer Vision CS308 Data Structures What is Computer Vision? Deals with the development of the theoretical and algorithmic basis by which useful information about the 3D world can be automatically
Overview of Computer Vision CS308 Data Structures What is Computer Vision? Deals with the development of the theoretical and algorithmic basis by which useful information about the 3D world can be automatically
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
What is computer vision?
 What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CAP 5415 Computer Vision. Fall 2011
 CAP 5415 Computer Vision Fall 2011 General Instructor: Dr. Mubarak Shah Email: shah@eecs.ucf.edu Office: 247-F HEC Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays
CAP 5415 Computer Vision Fall 2011 General Instructor: Dr. Mubarak Shah Email: shah@eecs.ucf.edu Office: 247-F HEC Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Computer Vision. Alexandra Branzan Albu Spring 2010
 Computer Vision Alexandra Branzan Albu Spring 2010 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 631): by appointment CENG 421/ ELEC 536 : Computer
Computer Vision Alexandra Branzan Albu Spring 2010 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 631): by appointment CENG 421/ ELEC 536 : Computer
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Image Analysis. Lars Schmidt-Thieme
 Image Analysis Image Analysis Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems & Institute for Computer Science University
Image Analysis Image Analysis Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems & Institute for Computer Science University
3D Computer Vision. Introduction. Introduction. CSc I6716 Fall Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Fall 2010 3D Computer Vision Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation Books, notes,
Introduction CSc I6716 Fall 2010 3D Computer Vision Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation Books, notes,
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Course Name: Computer Vision Course Code: IT444
 Course Name: Computer Vision Course Code: IT444 I. Basic Course Information Major or minor element of program: Major Department offering the course:information Technology Department Academic level:400
Course Name: Computer Vision Course Code: IT444 I. Basic Course Information Major or minor element of program: Major Department offering the course:information Technology Department Academic level:400
Topic 0. Introduction: What Is Computer Graphics? CSC 418/2504: Computer Graphics EF432. Today s Topics. What is Computer Graphics?
 EF432 Introduction to spagetti and meatballs CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~karan/courses/418/ Instructors: L0101, W 12-2pm
EF432 Introduction to spagetti and meatballs CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~karan/courses/418/ Instructors: L0101, W 12-2pm
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
CS A485 Computer and Machine Vision
 CS A485 Computer and Machine Vision Lecture 1 Introduction Part-2 January 14, 2014 Sam Siewert Biological Vision vs. Machine Vision (Why A Honey Bee is Better than HPC for CV) Humans - 100 million Photoreceptors
CS A485 Computer and Machine Vision Lecture 1 Introduction Part-2 January 14, 2014 Sam Siewert Biological Vision vs. Machine Vision (Why A Honey Bee is Better than HPC for CV) Humans - 100 million Photoreceptors
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
COMP Preliminaries Jan. 6, 2015
 Lecture 1 Computer graphics, broadly defined, is a set of methods for using computers to create and manipulate images. There are many applications of computer graphics including entertainment (games, cinema,
Lecture 1 Computer graphics, broadly defined, is a set of methods for using computers to create and manipulate images. There are many applications of computer graphics including entertainment (games, cinema,
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
Course Web Site ENGN2501 DIGITAL GEOMETRY PROCESSING. Tue & Thu Barus&Holley 157
 ENGN2501 DIGITAL GEOMETRY PROCESSING Tue & Thu 2:30-3:50 @ Barus&Holley 157 Instructor: Gabriel Taubin http://mesh.brown.edu/dgp } Polygon Meshes / Point Clouds } Representation / Data
ENGN2501 DIGITAL GEOMETRY PROCESSING Tue & Thu 2:30-3:50 @ Barus&Holley 157 Instructor: Gabriel Taubin http://mesh.brown.edu/dgp } Polygon Meshes / Point Clouds } Representation / Data
EECS 442 Computer Vision fall 2011
 EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
Announcements. Motion. Structure-from-Motion (SFM) Motion. Discrete Motion: Some Counting
 Motion. Discrete Motion: Some Counting") Announcements Motion HW 4 due Friday Final Exam: Tuesday, 6/7 at 8:00-11:00 Fill out your CAPES Introduction to Computer Vision CSE 152 Lecture 20 Motion Some problems of motion 1. Correspondence: Where
Announcements Motion HW 4 due Friday Final Exam: Tuesday, 6/7 at 8:00-11:00 Fill out your CAPES Introduction to Computer Vision CSE 152 Lecture 20 Motion Some problems of motion 1. Correspondence: Where
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Outline. Intro. Week 1, Fri Jan 4. What is CG used for? What is Computer Graphics? University of British Columbia CPSC 314 Computer Graphics Jan 2013
 University of British Columbia CPSC 314 Computer Graphics Jan 2013 Tamara Munzner Intro Outline defining computer graphics course structure course content overview Week 1, Fri Jan 4 http://www.ugrad.cs.ubc.ca/~cs314/vjan2013
University of British Columbia CPSC 314 Computer Graphics Jan 2013 Tamara Munzner Intro Outline defining computer graphics course structure course content overview Week 1, Fri Jan 4 http://www.ugrad.cs.ubc.ca/~cs314/vjan2013
Intro. Week 1, Fri Jan 4
 University of British Columbia CPSC 314 Computer Graphics Jan 2013 Tamara Munzner Intro Week 1, Fri Jan 4 http://www.ugrad.cs.ubc.ca/~cs314/vjan2013 Outline defining computer graphics course structure
University of British Columbia CPSC 314 Computer Graphics Jan 2013 Tamara Munzner Intro Week 1, Fri Jan 4 http://www.ugrad.cs.ubc.ca/~cs314/vjan2013 Outline defining computer graphics course structure
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
EF432. Introduction to spagetti and meatballs
 EF432 Introduction to spagetti and meatballs CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~karan/courses/418/fall2015 Instructor: Karan
EF432 Introduction to spagetti and meatballs CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~karan/courses/418/fall2015 Instructor: Karan
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CSE 4392/5369. Dr. Gian Luca Mariottini, Ph.D.
 University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
CS380: Introduction to Computer Graphics Introduction to OpenGLSL. Min H. Kim KAIST School of Computing. [CS380] Introduction to Computer Graphics
![CS380: Introduction to Computer Graphics Introduction to OpenGLSL. Min H. Kim KAIST School of Computing. [CS380] Introduction to Computer Graphics](/thumbs/79/79530457.jpg "CS380: Introduction to Computer Graphics Introduction to OpenGLSL. Min H. Kim KAIST School of Computing. [CS380] Introduction to Computer Graphics") CS380: Introduction to Computer Graphics Introduction to OpenGLSL Min H. Kim KAIST School of Computing Welcome [CS380] Introduction to Computer Graphics Professor: Min H. Kim ( 김민혁 ) (minhkim@vclab.kaist.ac.kr)
CS380: Introduction to Computer Graphics Introduction to OpenGLSL Min H. Kim KAIST School of Computing Welcome [CS380] Introduction to Computer Graphics Professor: Min H. Kim ( 김민혁 ) (minhkim@vclab.kaist.ac.kr)
Assignment 2: Stereo and 3D Reconstruction from Disparity
 CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
Camera calibration. Robotic vision. Ville Kyrki
 Camera calibration Robotic vision 19.1.2017 Where are we? Images, imaging Image enhancement Feature extraction and matching Image-based tracking Camera models and calibration Pose estimation Motion analysis
Camera calibration Robotic vision 19.1.2017 Where are we? Images, imaging Image enhancement Feature extraction and matching Image-based tracking Camera models and calibration Pose estimation Motion analysis
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Crush Around Augmented Reality Game Computer Vision and Image Processing for Mobile Platforms
 Crush Around Augmented Reality Game Computer Vision and Image Processing for Mobile Platforms Tomer Cagan cagan.tomer@post.idc.ac.il Ziv Levy levy.ziv@post.idc.ac.il School of Computer Science. The Interdisciplinary
Crush Around Augmented Reality Game Computer Vision and Image Processing for Mobile Platforms Tomer Cagan cagan.tomer@post.idc.ac.il Ziv Levy levy.ziv@post.idc.ac.il School of Computer Science. The Interdisciplinary
Announcements. Motion. Structure-from-Motion (SFM) Motion. Discrete Motion: Some Counting
 Motion. Discrete Motion: Some Counting") Announcements Motion Introduction to Computer Vision CSE 152 Lecture 20 HW 4 due Friday at Midnight Final Exam: Tuesday, 6/12 at 8:00AM-11:00AM, regular classroom Extra Office Hours: Monday 6/11 9:00AM-10:00AM
Announcements Motion Introduction to Computer Vision CSE 152 Lecture 20 HW 4 due Friday at Midnight Final Exam: Tuesday, 6/12 at 8:00AM-11:00AM, regular classroom Extra Office Hours: Monday 6/11 9:00AM-10:00AM
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Multiple View Geometry in Computer Vision
 Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Structure Computation Lecture 18 March 22, 2005 2 3D Reconstruction The goal of 3D reconstruction
Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Structure Computation Lecture 18 March 22, 2005 2 3D Reconstruction The goal of 3D reconstruction
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Overview. Related Work Tensor Voting in 2-D Tensor Voting in 3-D Tensor Voting in N-D Application to Vision Problems Stereo Visual Motion
 Overview Related Work Tensor Voting in 2-D Tensor Voting in 3-D Tensor Voting in N-D Application to Vision Problems Stereo Visual Motion Binary-Space-Partitioned Images 3-D Surface Extraction from Medical
Overview Related Work Tensor Voting in 2-D Tensor Voting in 3-D Tensor Voting in N-D Application to Vision Problems Stereo Visual Motion Binary-Space-Partitioned Images 3-D Surface Extraction from Medical
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
IMPLEMENTATION OF COMPUTER VISION TECHNIQUES USING OPENCV
 IMPLEMENTATION OF COMPUTER VISION TECHNIQUES USING OPENCV Anu Suneja Assistant Professor M. M. University Mullana, Haryana, India From last few years, the thrust for automation and simulation tools in
IMPLEMENTATION OF COMPUTER VISION TECHNIQUES USING OPENCV Anu Suneja Assistant Professor M. M. University Mullana, Haryana, India From last few years, the thrust for automation and simulation tools in
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Introductions. Today. Computer Vision Jan 19, What is computer vision? 1. Vision for measurement. Computer Vision
 Introductions Instructor: Prof. Kristen Grauman grauman@cs.utexas.edu Computer Vision Jan 19, 2011 TA: Shalini Sahoo shalini@cs.utexas.edu Today What is computer vision? Course overview Requirements, logistics
Introductions Instructor: Prof. Kristen Grauman grauman@cs.utexas.edu Computer Vision Jan 19, 2011 TA: Shalini Sahoo shalini@cs.utexas.edu Today What is computer vision? Course overview Requirements, logistics
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Computer Vision Course Lecture 04. Template Matching Image Pyramids. Ceyhun Burak Akgül, PhD cba-research.com. Spring 2015 Last updated 11/03/2015
 Computer Vision Course Lecture 04 Template Matching Image Pyramids Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 11/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
Computer Vision Course Lecture 04 Template Matching Image Pyramids Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 11/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
EF432. Introduction to spagetti and meatballs
 EF432 Introduction to spagetti and meatballs CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~karan/courses/418/ Instructors: L2501, T 6-8pm
EF432 Introduction to spagetti and meatballs CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~karan/courses/418/ Instructors: L2501, T 6-8pm
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
3D Computer Vision Introduction. Guido Gerig CS 6320, Spring 2012
 3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Fundamental Matrix & Structure from Motion
 Fundamental Matrix & Structure from Motion Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Review of Assignment 0. Transformations between images Structure from Motion The Essential
Fundamental Matrix & Structure from Motion Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Review of Assignment 0. Transformations between images Structure from Motion The Essential
Depth from two cameras: stereopsis
 Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Goals. Computer Graphics (Fall 2008) Course Outline. Course Outline. Course Outline. Demo: Surreal and Crazy World (HW 3)
 Course Outline. Course Outline. Course Outline. Demo: Surreal and Crazy World (HW 3)") Computer Graphics (Fall 2008) COMS 4160, Lecture 1: Overview and History Ravi Ramamoorthi http://www.cs.columbia.edu/~cs4160 Goals Systems: Be able to write complex 3D graphics programs (real-time in OpenGL,
Computer Graphics (Fall 2008) COMS 4160, Lecture 1: Overview and History Ravi Ramamoorthi http://www.cs.columbia.edu/~cs4160 Goals Systems: Be able to write complex 3D graphics programs (real-time in OpenGL,
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Maths at the Movies. Chris Budd
 Maths at the Movies Chris Budd See maths in the movies in different ways Sometimes maths in the background Moriarty Some movies hate maths Some feature mathematicians Some films are about mathematicians
Maths at the Movies Chris Budd See maths in the movies in different ways Sometimes maths in the background Moriarty Some movies hate maths Some feature mathematicians Some films are about mathematicians
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
COMPUTER VISION. Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai
 COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Overview. Computer Graphics CSE 167
 Overview Computer Graphics CSE 167 CSE 167: Computer Graphics Today Course overview Logistics CSE 167, Winter 2018 2 What is computer graphics? Everything visual on computers The representation and manipulation
Overview Computer Graphics CSE 167 CSE 167: Computer Graphics Today Course overview Logistics CSE 167, Winter 2018 2 What is computer graphics? Everything visual on computers The representation and manipulation
CSE 252A Computer Vision Homework 3 Instructor: Ben Ochoa Due : Monday, November 21, 2016, 11:59 PM
 CSE 252A Computer Vision Homework 3 Instructor: Ben Ochoa Due : Monday, November 21, 2016, 11:59 PM Instructions: Homework 3 has to be submitted in groups of 3. Review the academic integrity and collaboration
CSE 252A Computer Vision Homework 3 Instructor: Ben Ochoa Due : Monday, November 21, 2016, 11:59 PM Instructions: Homework 3 has to be submitted in groups of 3. Review the academic integrity and collaboration
Factorization Method Using Interpolated Feature Tracking via Projective Geometry
 Factorization Method Using Interpolated Feature Tracking via Projective Geometry Hideo Saito, Shigeharu Kamijima Department of Information and Computer Science, Keio University Yokohama-City, 223-8522,
Factorization Method Using Interpolated Feature Tracking via Projective Geometry Hideo Saito, Shigeharu Kamijima Department of Information and Computer Science, Keio University Yokohama-City, 223-8522,
CS 231A Computer Vision (Winter 2015) Problem Set 2
 Problem Set 2") CS 231A Computer Vision (Winter 2015) Problem Set 2 Due Feb 9 th 2015 11:59pm 1 Fundamental Matrix (20 points) In this question, you will explore some properties of fundamental matrix and derive a minimal
CS 231A Computer Vision (Winter 2015) Problem Set 2 Due Feb 9 th 2015 11:59pm 1 Fundamental Matrix (20 points) In this question, you will explore some properties of fundamental matrix and derive a minimal
Introduction to Video and Image Processing
 Thomas В. Moeslund Introduction to Video and Image Processing Building Real Systems and Applications Springer Contents 1 Introduction 1 1.1 The Different Flavors of Video and Image Processing 2 1.2 General
Thomas В. Moeslund Introduction to Video and Image Processing Building Real Systems and Applications Springer Contents 1 Introduction 1 1.1 The Different Flavors of Video and Image Processing 2 1.2 General
CSE328 Fundamentals of Computer Graphics: Concepts, Theory, Algorithms, and Applications
 CSE328 Fundamentals of Computer Graphics: Concepts, Theory, Algorithms, and Applications Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 11794--4400
CSE328 Fundamentals of Computer Graphics: Concepts, Theory, Algorithms, and Applications Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 11794--4400
CP467 Image Processing and Pattern Recognition
 CP467 Image Processing and Pattern Recognition Instructor: Hongbing Fan Introduction About DIP & PR About this course Lecture 1: an overview of DIP DIP&PR show What is Digital Image? We use digital image
CP467 Image Processing and Pattern Recognition Instructor: Hongbing Fan Introduction About DIP & PR About this course Lecture 1: an overview of DIP DIP&PR show What is Digital Image? We use digital image
Comp 471 / Cart 498: Final Project Proposal
 Pierre-Luc Bertrand Ramzy Hissin Justin Mereb Eric Zaino Comp 471 / Cart 498: Final Project Proposal Work Presented to Dr. Sha Xin Wei Concordia University October 23, 2006 Taste of Reality A Project on
Pierre-Luc Bertrand Ramzy Hissin Justin Mereb Eric Zaino Comp 471 / Cart 498: Final Project Proposal Work Presented to Dr. Sha Xin Wei Concordia University October 23, 2006 Taste of Reality A Project on
Projector Calibration for Pattern Projection Systems
 Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows
 ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography