CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
|
|
|
- Conrad O’Brien’
- 5 years ago
- Views:
Transcription







1 CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
2 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information describing our 3D world from images From dedicated sensors Geometry understanding (new addition to 3D Vision) Due to the emergence of big 3D data Semantics for example

3 Virtual tourism
4 3D Urban Modeling

5 Kinect Scanner

6 KinectFusion
7 DynamicFusion

8


9

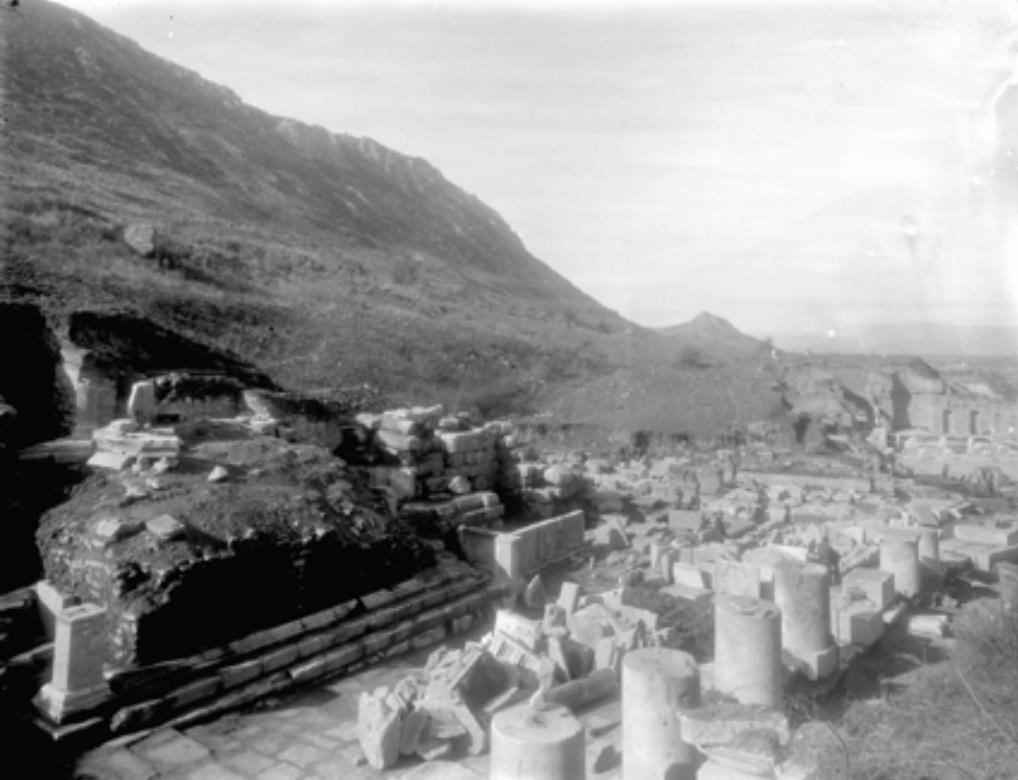
10 Reconstructing of the Octagon Monument

11 Finding matching fragments is a tedious job
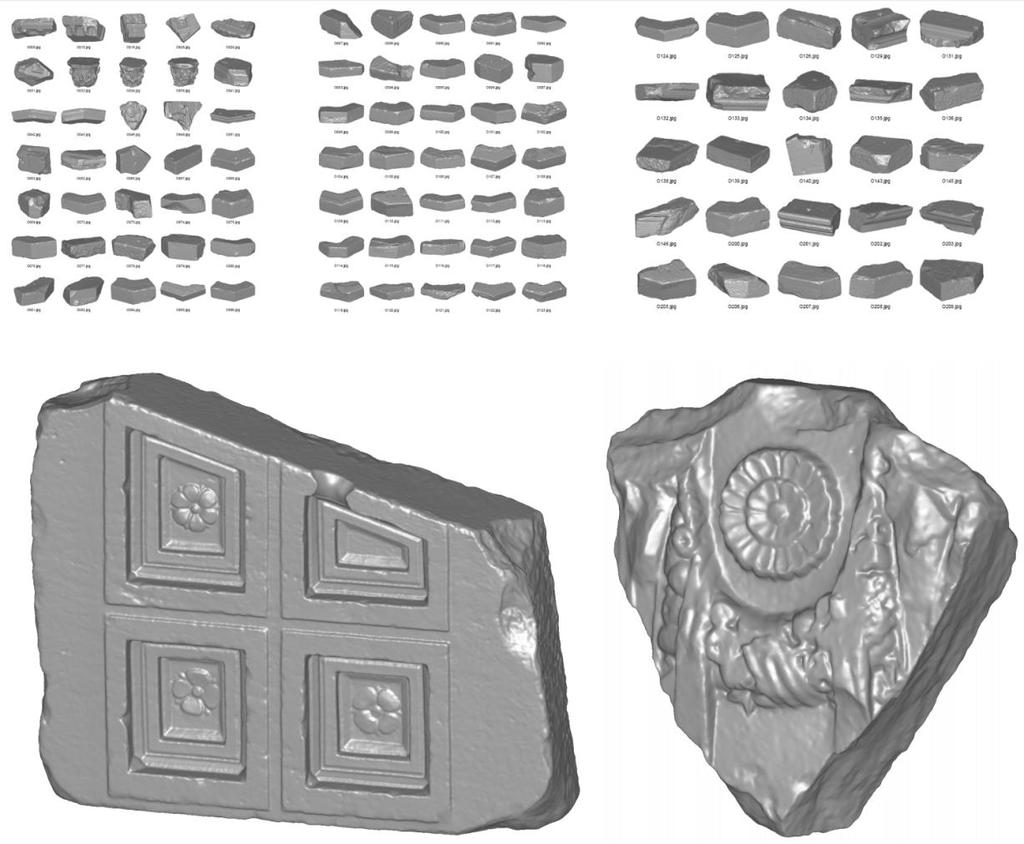

12 3D reconstruction of fragments

13 3D reconstruction and completion

14 Visual impact of the 3D restoration
15 3D ShapeNets [Wu et al. 15]

![al. 17]](/docs-images/93/114136240/images/16-1.jpg)
16 PointNet [R.Qi et al. 17]
17 Many other applications Augmented Reality Self-Driving Cars Human-machine interface Autonomous micro-helicopter navigation Performance capture Forensics Interactive 3D modeling
18 Image-based modeling
19 Interdisciplinary aspect Vision Biology Geometry Processing 3D Vision Architecture Robotics Medicine
20 Topics to be Covered
21 Topic I: 3D Reconstruction Geometry Epipolar geometry Fundamental matrix Extrinsic/Intrinsic camera parameters Camera calibration Vanishing points Homogeneous coordinates


22 Topic I: 3D Reconstruction Algorithms Feature extraction Feature correspondences Relative camera pose Structure-from-motion Multiview stereo Bundle adjustment ICP

23 Textbook




24 Topic II: How to represent 3D Data Triangular mesh Part-based models Implicit surface Light Field Representation Point cloud


25 Conversion between different representations Implicit -> mesh (Marching Cube)

26 Conversion between different representations Point cloud -> triangular mesh (Delaunay triangulation)
27 Conversion between different representations Pointcloud -> Implicit -> Mesh [Kazhdan et al. 06]

28 Two recommended books


![05] Retrieval [Karz and Tal 03] [Mitra et](/docs-images/93/114136240/images/29-3.jpg "al. 06] Segmentation Classification &")
29 Topic III: How to understand 3D Data Design algorithms to extract semantic information from one or a collection of shapes [van Kaick et al. 11] Matching [Funkhouser et al. 05] Retrieval [Karz and Tal 03] [Mitra et al. 06] Segmentation Classification & Clustering
30 Big 3D Data


31 Princeton Shape Benchmark 1800 models in 90 categories Shilane et al. 04


32 Large-scale online repositories 3D Warehouse Yobi3D 3M models in more than 4K categories





33 Image-based shape retrieval 20 years ago 10 years ago now
34 Trends
35 Trends in Geometry Understanding Single Shape/Scene Analysis Joint Data Analysis (Unsupervised) ML on 3D Data (Supervised)
36 Numerical Optimization
37 Optimization problems We will see time and time again: This course: how to formulate P, how to solve P, and what are the guarantees Many similar domains: Graphics/Robotics/Vision

38 Why bother how to solve P and what are the guarantees There are plenty of optimization softwares Almost all algorithms are data-dependent and can perform better or worse on different problems and data sets In many cases, studying P leads to new algorithms and research papers
39 Categories of optimization models Linear vs. Nonlinear Convex vs. Nonconvex Continuous vs. Discrete Deterministic vs. Stochastic We see all of them in 3D Vision tasks

40 Example I: Iterative Closest Point (or ICP) Multi-view Coordinate system alignment Optimization problem Performance Local/global convergence Convergence rate Uncertainty ICP [Besel and Mckay 92]
41 Example II: MRF Inference
42 Trends in optimization Non-linear optimization Convex optimization Non-convex optimization
43 Trends in optimization Second-order methods First-order methods Distributed optimization
44 Grading
45 Five assignments (70%) Theory + practice (Choose one of them) Theory 3D geometry (for formulating numerical optimization problems) Proof of local/global convergence Practice Programming assignments of real computer vision tasks
46 Final Project (30%) Work in groups of 2-4 people Publishable results ICCV/ICML/NIPS/SIGGRAPH/SIGGRAPH ASIA Written report 8 pages Introduction/related works/approach/results/conclusions Final presentation

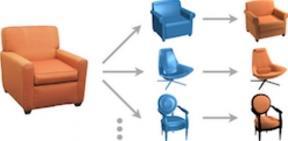
47 Potential project topic I Potential topic I: Image-based modeling from internet images A few images Non-identical objects Symmetries Machine learning


48 Potential project topics Potential topic II: single-view reconstruction from real images 3D Representation? Network architecture Domain adaptation Depth/semantic labels Human Hand [Song et al. 17]
49 Potential project topics Potential topic III: neural networks for 3D representations Implicit surface Multi-view Point cloud Mesh? Arrangement? Scene graph? Hybrid? [Wu et al. 16]

50 Potential project topics Potential topic IV: Geometry understanding Task Normal/Curvature Feature extraction Segmentation Part/object decomposition Correspondence Affordance Data Thousands of categories


51 Potential project topics Potential topic V: Reconstruction from hybrid sensors Low-res depth scan + High-res stereo Depth + shading Web cameras + internet images 360 images + internet images Street views + images from drones

52 Potential project topics Potential topic VI: Robot 3D Vision Salient views Next-best-view Model-based View planning Active vision Policies for exploration

53 Potential project topics Potential topic VII: structure recovery via optimization 2D human pose -> 3D human pose Structure from symmetry Structure from template Shape from shading Local/global convergence Exact recovery condition [Zhou et al. 16]


54 Potential project topics Potential topic VIII: Synchronization Multiview structure from motion Pose Pose + Point cloud Geometric alignment of point clouds Pose Pose + shape Global/Local convergence Exact recovery condition


55 Potential project topics Potential topic IX: uncertainties Human pose estimation Depth prediction Camera poses in MVSFM Geometry reconstruction Geometry understanding Quantification/Visualization
56 Logistics Office hour: Wednesdays 5:00 pm 7:00 pm TA: Xiangru Huang Office hour: TBD Homeworks Six late days Final project No late day
57 Questions?
Signed Distance Function Representation, Tracking, and Mapping. Tanner Schmidt
 Signed Distance Function Representation, Tracking, and Mapping Tanner Schmidt Overview - Explicit and implicit surface representations SDF fusion SDF tracking Related research - KinectFusion Patch Volumes
Signed Distance Function Representation, Tracking, and Mapping Tanner Schmidt Overview - Explicit and implicit surface representations SDF fusion SDF tracking Related research - KinectFusion Patch Volumes
CS354 Computer Graphics Introduction. Qixing Huang Januray 17 8h 2017
 CS354 Computer Graphics Introduction Qixing Huang Januray 17 8h 2017 CS 354 Computer Graphics Instructor: Qixing Huang huangqx@cs.utexas.edu Office: GDC 5.422 Office hours: Friday 3:00 pm 5:00 pm Teaching
CS354 Computer Graphics Introduction Qixing Huang Januray 17 8h 2017 CS 354 Computer Graphics Instructor: Qixing Huang huangqx@cs.utexas.edu Office: GDC 5.422 Office hours: Friday 3:00 pm 5:00 pm Teaching
3D Deep Learning
 3D Deep Learning Tutorial@CVPR2017 Hao Su (UCSD) Leonidas Guibas (Stanford) Michael Bronstein (Università della Svizzera Italiana) Evangelos Kalogerakis (UMass) Jimei Yang (Adobe Research) Charles Qi (Stanford)
3D Deep Learning Tutorial@CVPR2017 Hao Su (UCSD) Leonidas Guibas (Stanford) Michael Bronstein (Università della Svizzera Italiana) Evangelos Kalogerakis (UMass) Jimei Yang (Adobe Research) Charles Qi (Stanford)
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Monocular Tracking and Reconstruction in Non-Rigid Environments
 Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Course 23: Multiple-View Geometry For Image-Based Modeling
 Course 23: Multiple-View Geometry For Image-Based Modeling Jana Kosecka (CS, GMU) Yi Ma (ECE, UIUC) Stefano Soatto (CS, UCLA) Rene Vidal (Berkeley, John Hopkins) PRIMARY REFERENCE 1 Multiple-View Geometry
Course 23: Multiple-View Geometry For Image-Based Modeling Jana Kosecka (CS, GMU) Yi Ma (ECE, UIUC) Stefano Soatto (CS, UCLA) Rene Vidal (Berkeley, John Hopkins) PRIMARY REFERENCE 1 Multiple-View Geometry
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Depth Estimation Using Collection of Models
 Depth Estimation Using Collection of Models Karankumar Thakkar 1, Viral Borisagar 2 PG scholar 1, Assistant Professor 2 Computer Science & Engineering Department 1, 2 Government Engineering College, Sector
Depth Estimation Using Collection of Models Karankumar Thakkar 1, Viral Borisagar 2 PG scholar 1, Assistant Professor 2 Computer Science & Engineering Department 1, 2 Government Engineering College, Sector
ECS289: Scalable Machine Learning
 ECS289: Scalable Machine Learning Cho-Jui Hsieh UC Davis Sept 22, 2016 Course Information Website: http://www.stat.ucdavis.edu/~chohsieh/teaching/ ECS289G_Fall2016/main.html My office: Mathematical Sciences
ECS289: Scalable Machine Learning Cho-Jui Hsieh UC Davis Sept 22, 2016 Course Information Website: http://www.stat.ucdavis.edu/~chohsieh/teaching/ ECS289G_Fall2016/main.html My office: Mathematical Sciences
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Introduction to Computer Vision
 Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
URBAN STRUCTURE ESTIMATION USING PARALLEL AND ORTHOGONAL LINES
 URBAN STRUCTURE ESTIMATION USING PARALLEL AND ORTHOGONAL LINES An Undergraduate Research Scholars Thesis by RUI LIU Submitted to Honors and Undergraduate Research Texas A&M University in partial fulfillment
URBAN STRUCTURE ESTIMATION USING PARALLEL AND ORTHOGONAL LINES An Undergraduate Research Scholars Thesis by RUI LIU Submitted to Honors and Undergraduate Research Texas A&M University in partial fulfillment
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
CSE 4392/5369. Dr. Gian Luca Mariottini, Ph.D.
 University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Geometry of Multiple views
 1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
ME 555: Distributed Optimization
 ME 555: Distributed Optimization Duke University Spring 2015 1 Administrative Course: ME 555: Distributed Optimization (Spring 2015) Instructor: Time: Location: Office hours: Website: Soomin Lee (email:
ME 555: Distributed Optimization Duke University Spring 2015 1 Administrative Course: ME 555: Distributed Optimization (Spring 2015) Instructor: Time: Location: Office hours: Website: Soomin Lee (email:
Making Machines See. Roberto Cipolla Department of Engineering. Research team
 Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
What is computer vision?
 What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
CV: 3D to 2D mathematics. Perspective transformation; camera calibration; stereo computation; and more
 CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Learning to generate 3D shapes
 Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Rigid ICP registration with Kinect
 Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Finding Surface Correspondences With Shape Analysis
 Finding Surface Correspondences With Shape Analysis Sid Chaudhuri, Steve Diverdi, Maciej Halber, Vladimir Kim, Yaron Lipman, Tianqiang Liu, Wilmot Li, Niloy Mitra, Elena Sizikova, Thomas Funkhouser Motivation
Finding Surface Correspondences With Shape Analysis Sid Chaudhuri, Steve Diverdi, Maciej Halber, Vladimir Kim, Yaron Lipman, Tianqiang Liu, Wilmot Li, Niloy Mitra, Elena Sizikova, Thomas Funkhouser Motivation
LASERDATA LIS build your own bundle! LIS Pro 3D LIS 3.0 NEW! BETA AVAILABLE! LIS Road Modeller. LIS Orientation. LIS Geology.
 LIS 3.0...build your own bundle! NEW! LIS Geology LIS Terrain Analysis LIS Forestry LIS Orientation BETA AVAILABLE! LIS Road Modeller LIS Editor LIS City Modeller colors visualization I / O tools arithmetic
LIS 3.0...build your own bundle! NEW! LIS Geology LIS Terrain Analysis LIS Forestry LIS Orientation BETA AVAILABLE! LIS Road Modeller LIS Editor LIS City Modeller colors visualization I / O tools arithmetic
Using Faster-RCNN to Improve Shape Detection in LIDAR
 Using Faster-RCNN to Improve Shape Detection in LIDAR TJ Melanson Stanford University Stanford, CA 94305 melanson@stanford.edu Abstract In this paper, I propose a method for extracting objects from unordered
Using Faster-RCNN to Improve Shape Detection in LIDAR TJ Melanson Stanford University Stanford, CA 94305 melanson@stanford.edu Abstract In this paper, I propose a method for extracting objects from unordered
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Contents. 1 Introduction Background Organization Features... 7
 Contents 1 Introduction... 1 1.1 Background.... 1 1.2 Organization... 2 1.3 Features... 7 Part I Fundamental Algorithms for Computer Vision 2 Ellipse Fitting... 11 2.1 Representation of Ellipses.... 11
Contents 1 Introduction... 1 1.1 Background.... 1 1.2 Organization... 2 1.3 Features... 7 Part I Fundamental Algorithms for Computer Vision 2 Ellipse Fitting... 11 2.1 Representation of Ellipses.... 11
Reconstruction of complete 3D object model from multi-view range images.
 Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas
 PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Block Diagram. Physical World. Image Acquisition. Enhancement and Restoration. Segmentation. Feature Selection/Extraction.
 Block Diagram Physical World Image Acquisition Imaging Image Sampling, Quantization, Compression Image Processing Enhancement and Restoration Segmentation Image Analysis Feature Selection/Extraction Image
Block Diagram Physical World Image Acquisition Imaging Image Sampling, Quantization, Compression Image Processing Enhancement and Restoration Segmentation Image Analysis Feature Selection/Extraction Image
Department of Computer Science & Engineering University of Kalyani. Syllabus for Ph.D. Coursework
 Department of Computer Science & Engineering University of Kalyani Syllabus for Ph.D. Coursework Paper 1: A) Literature Review: (Marks - 25) B) Research Methodology: (Marks - 25) Paper 2: Computer Applications:
Department of Computer Science & Engineering University of Kalyani Syllabus for Ph.D. Coursework Paper 1: A) Literature Review: (Marks - 25) B) Research Methodology: (Marks - 25) Paper 2: Computer Applications:
PART IV: RS & the Kinect
 Computer Vision on Rolling Shutter Cameras PART IV: RS & the Kinect Per-Erik Forssén, Erik Ringaby, Johan Hedborg Computer Vision Laboratory Dept. of Electrical Engineering Linköping University Tutorial
Computer Vision on Rolling Shutter Cameras PART IV: RS & the Kinect Per-Erik Forssén, Erik Ringaby, Johan Hedborg Computer Vision Laboratory Dept. of Electrical Engineering Linköping University Tutorial
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Grasp Recognition using a 3D Articulated Model and Infrared Images
 Grasp Recognition using a 3D Articulated Model and Infrared Images Koichi Ogawara Institute of Industrial Science, Univ. of Tokyo, Tokyo, Japan Jun Takamatsu Institute of Industrial Science, Univ. of Tokyo,
Grasp Recognition using a 3D Articulated Model and Infrared Images Koichi Ogawara Institute of Industrial Science, Univ. of Tokyo, Tokyo, Japan Jun Takamatsu Institute of Industrial Science, Univ. of Tokyo,
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Hierarchical Volumetric Fusion of Depth Images
 Hierarchical Volumetric Fusion of Depth Images László Szirmay-Kalos, Milán Magdics Balázs Tóth, Tamás Umenhoffer Real-time color & 3D information Affordable integrated depth and color cameras Application:
Hierarchical Volumetric Fusion of Depth Images László Szirmay-Kalos, Milán Magdics Balázs Tóth, Tamás Umenhoffer Real-time color & 3D information Affordable integrated depth and color cameras Application:
Assignment 2: Stereo and 3D Reconstruction from Disparity
 CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Multiple View Geometry in Computer Vision
 Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Structure Computation Lecture 18 March 22, 2005 2 3D Reconstruction The goal of 3D reconstruction
Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Structure Computation Lecture 18 March 22, 2005 2 3D Reconstruction The goal of 3D reconstruction
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Outline. 1 Why we re interested in Real-Time tracking and mapping. 3 Kinect Fusion System Overview. 4 Real-time Surface Mapping
 Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Polygonal Meshes. Thomas Funkhouser Princeton University COS 526, Fall 2016
 Polygonal Meshes Thomas Funkhouser Princeton University COS 526, Fall 2016 Digital Geometry Processing Processing of 3D surfaces Creation, acquisition Storage, transmission Editing, animation, simulation
Polygonal Meshes Thomas Funkhouser Princeton University COS 526, Fall 2016 Digital Geometry Processing Processing of 3D surfaces Creation, acquisition Storage, transmission Editing, animation, simulation
3D Computer Vision. Structure from Motion. Prof. Didier Stricker
 3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen?
 Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI 13.07.2017 1 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research.
Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI 13.07.2017 1 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research.
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS
 A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS M. Hassanein a, *, A. Moussa a,b, N. El-Sheimy a a Department of Geomatics Engineering, University of Calgary, Calgary, Alberta, Canada
A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS M. Hassanein a, *, A. Moussa a,b, N. El-Sheimy a a Department of Geomatics Engineering, University of Calgary, Calgary, Alberta, Canada
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
CONCENTRATIONS: HIGH-PERFORMANCE COMPUTING & BIOINFORMATICS CYBER-SECURITY & NETWORKING
 MAJOR: DEGREE: COMPUTER SCIENCE MASTER OF SCIENCE (M.S.) CONCENTRATIONS: HIGH-PERFORMANCE COMPUTING & BIOINFORMATICS CYBER-SECURITY & NETWORKING The Department of Computer Science offers a Master of Science
MAJOR: DEGREE: COMPUTER SCIENCE MASTER OF SCIENCE (M.S.) CONCENTRATIONS: HIGH-PERFORMANCE COMPUTING & BIOINFORMATICS CYBER-SECURITY & NETWORKING The Department of Computer Science offers a Master of Science
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Object Reconstruction
 B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
Fundamentals of Digital Image Processing
 \L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
\L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
Multiple View Geometry in Computer Vision Second Edition
 Multiple View Geometry in Computer Vision Second Edition Richard Hartley Australian National University, Canberra, Australia Andrew Zisserman University of Oxford, UK CAMBRIDGE UNIVERSITY PRESS Contents
Multiple View Geometry in Computer Vision Second Edition Richard Hartley Australian National University, Canberra, Australia Andrew Zisserman University of Oxford, UK CAMBRIDGE UNIVERSITY PRESS Contents
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Computer Vision at Cambridge: Reconstruction,Registration and Recognition
 Computer Vision at Cambridge: Reconstruction,Registration and Recognition Roberto Cipolla Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering
Computer Vision at Cambridge: Reconstruction,Registration and Recognition Roberto Cipolla Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Reconstructing Reflective and Transparent Surfaces from Epipolar Plane Images
 Sven Wanner and Bastian Goldlücke Heidelberg Collaboratory for Image Processing 1. Light Fields and Epipolar Plane Images 1. Light Fields and Epipolar Plane Images Light Fields as a dense sampling of a
Sven Wanner and Bastian Goldlücke Heidelberg Collaboratory for Image Processing 1. Light Fields and Epipolar Plane Images 1. Light Fields and Epipolar Plane Images Light Fields as a dense sampling of a
Learning Probabilistic Models from Collections of 3D Meshes
 Learning Probabilistic Models from Collections of 3D Meshes Sid Chaudhuri, Steve Diverdi, Matthew Fisher, Pat Hanrahan, Vladimir Kim, Wilmot Li, Niloy Mitra, Daniel Ritchie, Manolis Savva, and Thomas Funkhouser
Learning Probabilistic Models from Collections of 3D Meshes Sid Chaudhuri, Steve Diverdi, Matthew Fisher, Pat Hanrahan, Vladimir Kim, Wilmot Li, Niloy Mitra, Daniel Ritchie, Manolis Savva, and Thomas Funkhouser
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
The Hilbert Problems of Computer Vision. Jitendra Malik UC Berkeley & Google, Inc.
 The Hilbert Problems of Computer Vision Jitendra Malik UC Berkeley & Google, Inc. This talk The computational power of the human brain Research is the art of the soluble Hilbert problems, circa 2004 Hilbert
The Hilbert Problems of Computer Vision Jitendra Malik UC Berkeley & Google, Inc. This talk The computational power of the human brain Research is the art of the soluble Hilbert problems, circa 2004 Hilbert
Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity
 Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity Johannes Schneider, Thomas Läbe, Wolfgang Förstner 1 Department of Photogrammetry Institute of Geodesy and Geoinformation
Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity Johannes Schneider, Thomas Läbe, Wolfgang Förstner 1 Department of Photogrammetry Institute of Geodesy and Geoinformation
Welcome to CS 4/57101 Computer Graphics
 Welcome to CS 4/57101 Computer Graphics Goal: The goal of this course is to provide an introduction to the theory and practice of computer graphics. The course will assume a good background in programming
Welcome to CS 4/57101 Computer Graphics Goal: The goal of this course is to provide an introduction to the theory and practice of computer graphics. The course will assume a good background in programming
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
3D Scanning. Lecture courtesy of Szymon Rusinkiewicz Princeton University
 3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
CS-235 Computational Geometry
 CS-235 Computational Geometry Computer Science Department Fall Quarter 2002. Computational Geometry Study of algorithms for geometric problems. Deals with discrete shapes: points, lines, polyhedra, polygonal
CS-235 Computational Geometry Computer Science Department Fall Quarter 2002. Computational Geometry Study of algorithms for geometric problems. Deals with discrete shapes: points, lines, polyhedra, polygonal
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Computer Vision. Introduction
 Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
CSCD18: Computer Graphics. Instructor: Leonid Sigal
 CSCD18: Computer Graphics Instructor: Leonid Sigal CSCD18: Computer Graphics Instructor: Leonid Sigal (call me Leon) lsigal@utsc.utoronto.ca www.cs.toronto.edu/~ls/ Office: SW626 Office Hour: M, 12-1pm?
CSCD18: Computer Graphics Instructor: Leonid Sigal CSCD18: Computer Graphics Instructor: Leonid Sigal (call me Leon) lsigal@utsc.utoronto.ca www.cs.toronto.edu/~ls/ Office: SW626 Office Hour: M, 12-1pm?