RECURRENT NEURAL NETWORKS
|
|
|
- Nelson Ambrose Jordan
- 5 years ago
- Views:
Transcription
1 RECURRENT NEURAL NETWORKS
2 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection (HOG+SVM) Detection/ Segmentat ion/classif ication Dry/wet road classificati on ADAS Planning/ Control Optimal control End-toend Learning End-toend Learning Tasks Driver state Behavior Prediction/ Driver identificati on Vehicle Diagnosis Smart factory DNN * * Reinforcement * Unsupervised * *
3 RNN INTRODUCTION

")
4 Recurrent Neural Network ( 참고 )
5 Repeating module in RNN

6 Repeating module in LSTM
7 Recurrent Neural Network
8 Recurrent Neural Network
9 FLEXIBILITY OF RNN

10 RNN offers a lot of flexibility Vanilla N.N. Image Captioning Sentiment Classification Machine Translation Video Classification on Frame Level
11 TRAINING
12 Training Backpropagation through time (BPTT) Unfold and apply SGD
13 EXAMPLE/VARIANTS
14 Training
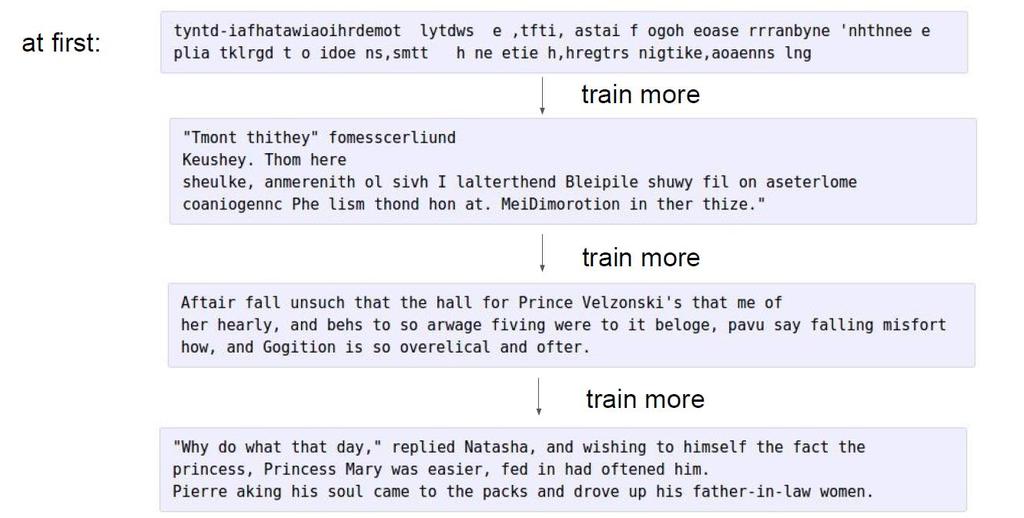
15 Results

16 Generated C code

17 Searching for interpretable cells

18 Searching for interpretable cells

19 Searching for interpretable cells

20 Searching for interpretable cells
21 Variants Bidirectional Bidirectional Deep
22 예제코드 LSTM
23 APPLICATIONS
24 CAR THAT KNOWS BEFORE YOU DO VIA SENSORY-FUSION DEEP LEARNING ARCHITECTURE ICCV 2015, Cornell Univ., Stanford Univ., Brain Of Things Inc
25 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection (HOG+SVM) Detection/ Segmentat ion/classif ication Dry/wet road classificati on ADAS Planning/ Control Optimal control End-toend Learning End-toend Learning Tasks Driver state Behavior Prediction/ Driver identificati on Vehicle Diagnosis Smart factory DNN * * Reinforcement * Unsupervised * *
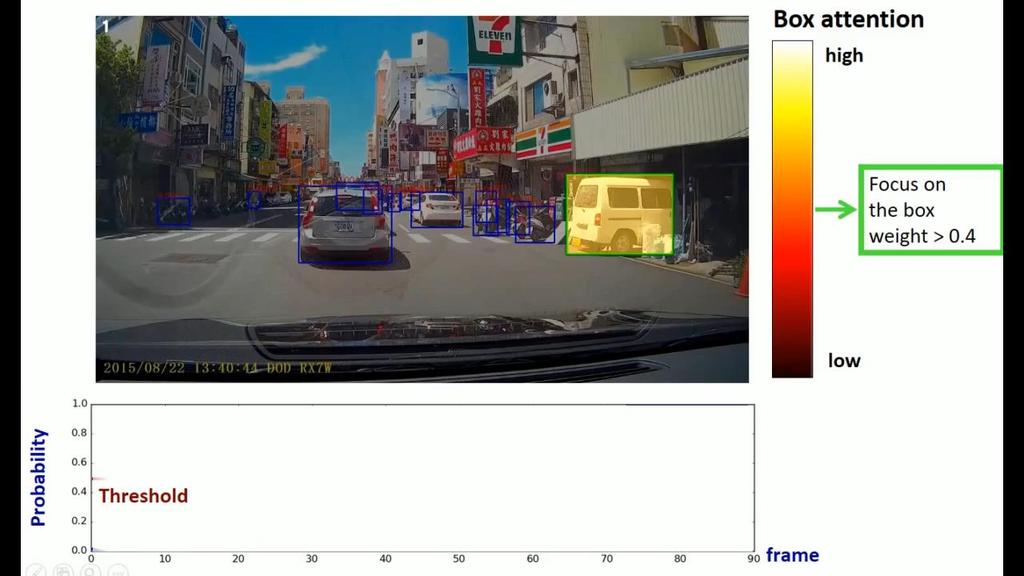
26 Overview An approach for anticipating driving maneuvers, several seconds in advance: lane change, keeping straight, turn,... Generic sensory-fusion RNN-LSTM architecture for anticipation in robotics applications

27 Demo Video
28 Setup Driver-facing camera inside the vehicle Camera facing the road Speed logger of the car Global Positioning System (GPS)
29 Features 1. Face detection and tracking: - Driver s face: Viola Jones face detector - Point extract: Shi-Tomasi corner detector - Facial points tracker: KLT(Kanade-Lucas-Tomasi) 2. Head motion features (φ face R 9 ): - histogram features are used - matches facial points and create histograms of corresponding horizontal motions 3. 3D head pose and facial landmark features(φ face R 12 ): CLNF tracker model Aggregate φ face for every 20 frames
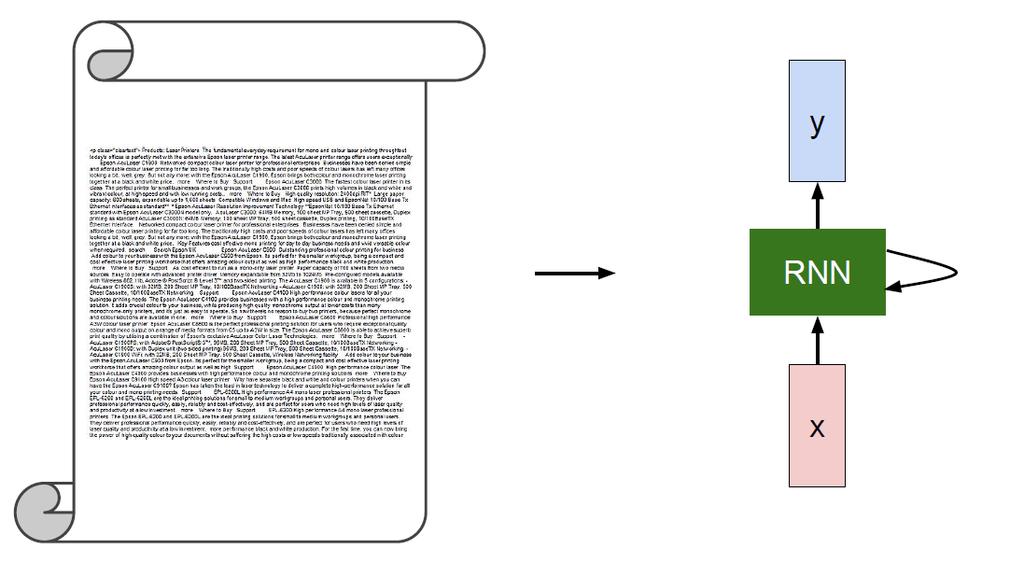
30 Network Architecture at a glance LSTM units is used for training - consider accumulated information from the past: noted as event x 1, x 2,, x T, y - y t is updated as y t = softmax W y h t + b y, with the representation h t = f Wx t + Hh t 1 + b x t : observation at time t y:representation of the event

31 Data set Fully natural driving 1180 miles of natural freeway, city driving Collected across two states Ten drivers, different kinds of driving maneuvers 2 months to take About 17GB 700 events of annotation lane change turns straight
32 Result With sensory fusion: - Precision of 84.5% - Recall of 77.1% - Anticipates maneuvers 3.5 seconds on average With incorporating the driver s 3D head-pose: - Precision of 90.5% - Recall of 87.4% - Anticipates maneuvers 3.16 seconds on average
33 CHARACTERIZING DRIVING STYLES WITH DEEP LEARNING W. Dong et al. ArXiv 2016 IBM Research China, Nanjing Univ., Univ. of Waterloo
34 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection (HOG+SVM) Detection/ Segmentat ion/classif ication Dry/wet road classificati on ADAS Planning/ Control Optimal control End-toend Learning End-toend Learning Tasks Driver state Behavior Prediction/ Driver identificati on Vehicle Diagnosis Smart factory DNN * * Reinforcement * Unsupervised * *



35 Overview Speed norm difference of speed norm acceleration norm difference of acceleration norm angular speed mean Minimum Maximum First quartile Second quartile Third quartile Standard deviation Extracted 35 features Classification model Driver identification GPS on vehicles
36 Data 목표 : GPS 데이터를이용하여사용자 ID 분류수행 Input sensor GPS trajectory as a sequence (x, y, t) Dataset and feature map Training/Test data Data from 50/1,000 drivers (original data: Kaggle 2015 competition on Driver Telematics Analysis) Data transformation Feature map (35=5 x 7) Basic features (5) :Speed norm; difference of speed norm; acceleration norm; difference of acceleration norm; angular speed Statistical features (7) : mean; min; max; ¼ ; ½ ; ¾ ; standard deviation of each basic feature
37 Machine Learning Machine Learning Models CNN Six layers model (3 conv. + 3 FC) RNN RNN model Gradient boosting decision tree (GBDT) For reference
38 Experimental Results Experiments 80% for training, 20% for testing Small scale test for 50 drivers data Include 35,000 segments from 8,000 trips large scale test for 1,000 drivers data Results
39 DETECTING ROAD SURFACE WETNESS
40 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection (HOG+SVM) Detection/ Segmentat ion/classif ication Dry/wet road classificati on ADAS Planning/ Control Optimal control End-toend Learning End-toend Learning Tasks Driver state Behavior Prediction/ Driver identificati on Vehicle Diagnosis Smart factory DNN * * Reinforcement * Unsupervised * *

41

42 Dataset/Machine Learning Shotgun microphone behind the rear tire Spectogram + LSTM 관련기사

43 Detecting Road Surface wetness
44 END-TO-END DRIVING WITH RNNS
45 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection (HOG+SVM) Detection/ Segmentat ion/classif ication Dry/wet road classificati on ADAS Planning/ Control Optimal control End-toend Learning End-toend Learning Tasks Driver state Behavior Prediction/ Driver identificati on Vehicle Diagnosis Smart factory DNN * * Reinforcement * Unsupervised * *
46 End-to-end Driving with RNNs 1 st and 3 rd place winner of the Udacity end-to-end steering competition used RNNs: Sequence-to-sequence mapping from images to steering angles 관련링크

47

48 1 st Place Winner LSTM inputs: 3D convolution of image sequence Outputs: predicted steering angle, speed, torque Sequence length = 10

49 3 rd Place Winner LSTM inputs: 3000 features extracted with CNN Outputs: predicted steering angle Sequence length = 10
50 ANTICIPATING ACCIDENTS IN DASHCAM VIDEOS


51 Dataset Positive examples Negative examples Total Training set Testing set Total Positive example Negative example
52
53 BACKUPS
54 LONG-TERM RECURRENT CONVOLUTIONAL NETWORKS FOR VISUAL RECOGNITION AND DESCRIPTION Jeff Donahue, Lisa Anne Hendricks, Marcus Rohrbach, Subhashini Venugopalan, Sergio Guadarrama, Kate Saenko, Trevor Darrell

55 Long-time Spatio-Temporal ConvNets
56 DELVING DEEPER INTO CONVOLUTIONAL NETWORKS FOR LEARNING VIDEO REPRESENTATIONS Ballas et al., 2016

57 Limitations in simple RNN-ConvNet Visualization of convolutional maps on successive frames in video. As we go up in the CNN hierarchy, we observe that the convolutional maps are more stable over time, and thus discard variation over short temporal windows.

58 Stack-GRU-RCN RCN (Recurrent Convolution Networks)
Self Driving. DNN * * Reinforcement * Unsupervised *
 CNN 응용 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection
CNN 응용 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection
CS231N Section. Video Understanding 6/1/2018
 CS231N Section Video Understanding 6/1/2018 Outline Background / Motivation / History Video Datasets Models Pre-deep learning CNN + RNN 3D convolution Two-stream What we ve seen in class so far... Image
CS231N Section Video Understanding 6/1/2018 Outline Background / Motivation / History Video Datasets Models Pre-deep learning CNN + RNN 3D convolution Two-stream What we ve seen in class so far... Image
HUMAN ACTION RECOGNITION
 HUMAN ACTION RECOGNITION Human Action Recognition 1. Hand crafted feature + Shallow classifier 2. Human localization + (Hand crafted features) + 3D CNN Input is a small chunk of video 3. 3D CNN Input is
HUMAN ACTION RECOGNITION Human Action Recognition 1. Hand crafted feature + Shallow classifier 2. Human localization + (Hand crafted features) + 3D CNN Input is a small chunk of video 3. 3D CNN Input is
Code Mania Artificial Intelligence: a. Module - 1: Introduction to Artificial intelligence and Python:
 Code Mania 2019 Artificial Intelligence: a. Module - 1: Introduction to Artificial intelligence and Python: 1. Introduction to Artificial Intelligence 2. Introduction to python programming and Environment
Code Mania 2019 Artificial Intelligence: a. Module - 1: Introduction to Artificial intelligence and Python: 1. Introduction to Artificial Intelligence 2. Introduction to python programming and Environment
Sequence Modeling: Recurrent and Recursive Nets. By Pyry Takala 14 Oct 2015
 Sequence Modeling: Recurrent and Recursive Nets By Pyry Takala 14 Oct 2015 Agenda Why Recurrent neural networks? Anatomy and basic training of an RNN (10.2, 10.2.1) Properties of RNNs (10.2.2, 8.2.6) Using
Sequence Modeling: Recurrent and Recursive Nets By Pyry Takala 14 Oct 2015 Agenda Why Recurrent neural networks? Anatomy and basic training of an RNN (10.2, 10.2.1) Properties of RNNs (10.2.2, 8.2.6) Using
Machine Learning 13. week
 Machine Learning 13. week Deep Learning Convolutional Neural Network Recurrent Neural Network 1 Why Deep Learning is so Popular? 1. Increase in the amount of data Thanks to the Internet, huge amount of
Machine Learning 13. week Deep Learning Convolutional Neural Network Recurrent Neural Network 1 Why Deep Learning is so Popular? 1. Increase in the amount of data Thanks to the Internet, huge amount of
People Detection and Video Understanding
 1 People Detection and Video Understanding Francois BREMOND INRIA Sophia Antipolis STARS team Institut National Recherche Informatique et Automatisme Francois.Bremond@inria.fr http://www-sop.inria.fr/members/francois.bremond/
1 People Detection and Video Understanding Francois BREMOND INRIA Sophia Antipolis STARS team Institut National Recherche Informatique et Automatisme Francois.Bremond@inria.fr http://www-sop.inria.fr/members/francois.bremond/
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Bidirectional Recurrent Convolutional Networks for Video Super-Resolution
 Bidirectional Recurrent Convolutional Networks for Video Super-Resolution Qi Zhang & Yan Huang Center for Research on Intelligent Perception and Computing (CRIPAC) National Laboratory of Pattern Recognition
Bidirectional Recurrent Convolutional Networks for Video Super-Resolution Qi Zhang & Yan Huang Center for Research on Intelligent Perception and Computing (CRIPAC) National Laboratory of Pattern Recognition
Multimodal Gesture Recognition using Multi-stream Recurrent Neural Network
 Multimodal Gesture Recognition using Multi-stream Recurrent Neural Network Noriki Nishida and Hideki Nakayama Machine Perception Group Graduate School of Information Science and Technology The University
Multimodal Gesture Recognition using Multi-stream Recurrent Neural Network Noriki Nishida and Hideki Nakayama Machine Perception Group Graduate School of Information Science and Technology The University
Project Final Report
 Project Final Report Ye Tian Stanford University yetian@stanford.edu Tianlun Li Stanford University tianlunl@stanford.edu Abstract We plan to do image-to-sentence generation. This application bridges vision
Project Final Report Ye Tian Stanford University yetian@stanford.edu Tianlun Li Stanford University tianlunl@stanford.edu Abstract We plan to do image-to-sentence generation. This application bridges vision
Recurrent Neural Networks for Driver Activity Anticipation via Sensory-Fusion Architecture
 Recurrent Neural Networks for Driver Activity Anticipation via Sensory-Fusion Architecture Ashesh Jain 1,2, Avi Singh 1, Hema S Koppula 1,2, Shane Soh 2, and Ashutosh Saxena 1,3 Abstract Anticipating the
Recurrent Neural Networks for Driver Activity Anticipation via Sensory-Fusion Architecture Ashesh Jain 1,2, Avi Singh 1, Hema S Koppula 1,2, Shane Soh 2, and Ashutosh Saxena 1,3 Abstract Anticipating the
LSTM and its variants for visual recognition. Xiaodan Liang Sun Yat-sen University
 LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
Characterization and Benchmarking of Deep Learning. Natalia Vassilieva, PhD Sr. Research Manager
 Characterization and Benchmarking of Deep Learning Natalia Vassilieva, PhD Sr. Research Manager Deep learning applications Vision Speech Text Other Search & information extraction Security/Video surveillance
Characterization and Benchmarking of Deep Learning Natalia Vassilieva, PhD Sr. Research Manager Deep learning applications Vision Speech Text Other Search & information extraction Security/Video surveillance
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Multilayer and Multimodal Fusion of Deep Neural Networks for Video Classification
 Multilayer and Multimodal Fusion of Deep Neural Networks for Video Classification Xiaodong Yang, Pavlo Molchanov, Jan Kautz INTELLIGENT VIDEO ANALYTICS Surveillance event detection Human-computer interaction
Multilayer and Multimodal Fusion of Deep Neural Networks for Video Classification Xiaodong Yang, Pavlo Molchanov, Jan Kautz INTELLIGENT VIDEO ANALYTICS Surveillance event detection Human-computer interaction
Object Detection. Part1. Presenter: Dae-Yong
 Object Part1 Presenter: Dae-Yong Contents 1. What is an Object? 2. Traditional Object Detector 3. Deep Learning-based Object Detector What is an Object? Subset of Object Recognition What is an Object?
Object Part1 Presenter: Dae-Yong Contents 1. What is an Object? 2. Traditional Object Detector 3. Deep Learning-based Object Detector What is an Object? Subset of Object Recognition What is an Object?
Binary Convolutional Neural Network on RRAM
 Binary Convolutional Neural Network on RRAM Tianqi Tang, Lixue Xia, Boxun Li, Yu Wang, Huazhong Yang Dept. of E.E, Tsinghua National Laboratory for Information Science and Technology (TNList) Tsinghua
Binary Convolutional Neural Network on RRAM Tianqi Tang, Lixue Xia, Boxun Li, Yu Wang, Huazhong Yang Dept. of E.E, Tsinghua National Laboratory for Information Science and Technology (TNList) Tsinghua
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Topics in AI (CPSC 532L): Multimodal Learning with Vision, Language and Sound. Lecture 12: Deep Reinforcement Learning
: Multimodal Learning with Vision, Language and Sound. Lecture 12: Deep Reinforcement Learning") Topics in AI (CPSC 532L): Multimodal Learning with Vision, Language and Sound Lecture 12: Deep Reinforcement Learning Types of Learning Supervised training Learning from the teacher Training data includes
Topics in AI (CPSC 532L): Multimodal Learning with Vision, Language and Sound Lecture 12: Deep Reinforcement Learning Types of Learning Supervised training Learning from the teacher Training data includes
Hello Edge: Keyword Spotting on Microcontrollers
 Hello Edge: Keyword Spotting on Microcontrollers Yundong Zhang, Naveen Suda, Liangzhen Lai and Vikas Chandra ARM Research, Stanford University arxiv.org, 2017 Presented by Mohammad Mofrad University of
Hello Edge: Keyword Spotting on Microcontrollers Yundong Zhang, Naveen Suda, Liangzhen Lai and Vikas Chandra ARM Research, Stanford University arxiv.org, 2017 Presented by Mohammad Mofrad University of
Multi-Glance Attention Models For Image Classification
 Multi-Glance Attention Models For Image Classification Chinmay Duvedi Stanford University Stanford, CA cduvedi@stanford.edu Pararth Shah Stanford University Stanford, CA pararth@stanford.edu Abstract We
Multi-Glance Attention Models For Image Classification Chinmay Duvedi Stanford University Stanford, CA cduvedi@stanford.edu Pararth Shah Stanford University Stanford, CA pararth@stanford.edu Abstract We
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601
 with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601") Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks
 Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Boya Peng Department of Computer Science Stanford University boya@stanford.edu Zelun Luo Department of Computer
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Boya Peng Department of Computer Science Stanford University boya@stanford.edu Zelun Luo Department of Computer
A Torch Library for Action Recognition and Detection Using CNNs and LSTMs
 A Torch Library for Action Recognition and Detection Using CNNs and LSTMs Gary Thung and Helen Jiang Stanford University {gthung, helennn}@stanford.edu Abstract It is very common now to see deep neural
A Torch Library for Action Recognition and Detection Using CNNs and LSTMs Gary Thung and Helen Jiang Stanford University {gthung, helennn}@stanford.edu Abstract It is very common now to see deep neural
Visual features detection based on deep neural network in autonomous driving tasks
 430 Fomin I., Gromoshinskii D., Stepanov D. Visual features detection based on deep neural network in autonomous driving tasks Ivan Fomin, Dmitrii Gromoshinskii, Dmitry Stepanov Computer vision lab Russian
430 Fomin I., Gromoshinskii D., Stepanov D. Visual features detection based on deep neural network in autonomous driving tasks Ivan Fomin, Dmitrii Gromoshinskii, Dmitry Stepanov Computer vision lab Russian
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
An Exploration of Computer Vision Techniques for Bird Species Classification
 An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
Tutorial on Keras CAP ADVANCED COMPUTER VISION SPRING 2018 KISHAN S ATHREY
 Tutorial on Keras CAP 6412 - ADVANCED COMPUTER VISION SPRING 2018 KISHAN S ATHREY Deep learning packages TensorFlow Google PyTorch Facebook AI research Keras Francois Chollet (now at Google) Chainer Company
Tutorial on Keras CAP 6412 - ADVANCED COMPUTER VISION SPRING 2018 KISHAN S ATHREY Deep learning packages TensorFlow Google PyTorch Facebook AI research Keras Francois Chollet (now at Google) Chainer Company
arxiv: v2 [cs.cv] 14 May 2018
![arxiv: v2 [cs.cv] 14 May 2018](/thumbs/79/79495201.jpg "arxiv: v2 [cs.cv] 14 May 2018") ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
S7348: Deep Learning in Ford's Autonomous Vehicles. Bryan Goodman Argo AI 9 May 2017
 S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
Lecture: Deep Convolutional Neural Networks
 Lecture: Deep Convolutional Neural Networks Shubhang Desai Stanford Vision and Learning Lab 1 Today s agenda Deep convolutional networks History of CNNs CNN dev Architecture search 2 Previously argmax
Lecture: Deep Convolutional Neural Networks Shubhang Desai Stanford Vision and Learning Lab 1 Today s agenda Deep convolutional networks History of CNNs CNN dev Architecture search 2 Previously argmax
2 OVERVIEW OF RELATED WORK
 Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Recurrent Neural Networks and Transfer Learning for Action Recognition
 Recurrent Neural Networks and Transfer Learning for Action Recognition Andrew Giel Stanford University agiel@stanford.edu Ryan Diaz Stanford University ryandiaz@stanford.edu Abstract We have taken on the
Recurrent Neural Networks and Transfer Learning for Action Recognition Andrew Giel Stanford University agiel@stanford.edu Ryan Diaz Stanford University ryandiaz@stanford.edu Abstract We have taken on the
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Combining Neural Networks and Log-linear Models to Improve Relation Extraction
 Combining Neural Networks and Log-linear Models to Improve Relation Extraction Thien Huu Nguyen and Ralph Grishman Computer Science Department, New York University {thien,grishman}@cs.nyu.edu Outline Relation
Combining Neural Networks and Log-linear Models to Improve Relation Extraction Thien Huu Nguyen and Ralph Grishman Computer Science Department, New York University {thien,grishman}@cs.nyu.edu Outline Relation
Ryerson University CP8208. Soft Computing and Machine Intelligence. Naive Road-Detection using CNNS. Authors: Sarah Asiri - Domenic Curro
 Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving assistance applications on smart mobile devices
 Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Deep Neural Networks for Recognizing Online Handwritten Mathematical Symbols
 Deep Neural Networks for Recognizing Online Handwritten Mathematical Symbols Hai Dai Nguyen 1, Anh Duc Le 2 and Masaki Nakagawa 3 Tokyo University of Agriculture and Technology 2-24-16 Nakacho, Koganei-shi,
Deep Neural Networks for Recognizing Online Handwritten Mathematical Symbols Hai Dai Nguyen 1, Anh Duc Le 2 and Masaki Nakagawa 3 Tokyo University of Agriculture and Technology 2-24-16 Nakacho, Koganei-shi,
LSTM: An Image Classification Model Based on Fashion-MNIST Dataset
 LSTM: An Image Classification Model Based on Fashion-MNIST Dataset Kexin Zhang, Research School of Computer Science, Australian National University Kexin Zhang, U6342657@anu.edu.au Abstract. The application
LSTM: An Image Classification Model Based on Fashion-MNIST Dataset Kexin Zhang, Research School of Computer Science, Australian National University Kexin Zhang, U6342657@anu.edu.au Abstract. The application
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
CSC 578 Neural Networks and Deep Learning
 CSC 578 Neural Networks and Deep Learning Fall 2018/19 7. Recurrent Neural Networks (Some figures adapted from NNDL book) 1 Recurrent Neural Networks 1. Recurrent Neural Networks (RNNs) 2. RNN Training
CSC 578 Neural Networks and Deep Learning Fall 2018/19 7. Recurrent Neural Networks (Some figures adapted from NNDL book) 1 Recurrent Neural Networks 1. Recurrent Neural Networks (RNNs) 2. RNN Training
Layerwise Interweaving Convolutional LSTM
 Layerwise Interweaving Convolutional LSTM Tiehang Duan and Sargur N. Srihari Department of Computer Science and Engineering The State University of New York at Buffalo Buffalo, NY 14260, United States
Layerwise Interweaving Convolutional LSTM Tiehang Duan and Sargur N. Srihari Department of Computer Science and Engineering The State University of New York at Buffalo Buffalo, NY 14260, United States
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
A Comparison of Sequence-Trained Deep Neural Networks and Recurrent Neural Networks Optical Modeling For Handwriting Recognition
 A Comparison of Sequence-Trained Deep Neural Networks and Recurrent Neural Networks Optical Modeling For Handwriting Recognition Théodore Bluche, Hermann Ney, Christopher Kermorvant SLSP 14, Grenoble October
A Comparison of Sequence-Trained Deep Neural Networks and Recurrent Neural Networks Optical Modeling For Handwriting Recognition Théodore Bluche, Hermann Ney, Christopher Kermorvant SLSP 14, Grenoble October
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick, Jeff Donahue, Trevor Darrell, Jitendra Malik Presented by Pandian Raju and Jialin Wu Last class SGD for Document
Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick, Jeff Donahue, Trevor Darrell, Jitendra Malik Presented by Pandian Raju and Jialin Wu Last class SGD for Document
EasyChair Preprint. Real-Time Action Recognition based on Enhanced Motion Vector Temporal Segment Network
 EasyChair Preprint 730 Real-Time Action Recognition based on Enhanced Motion Vector Temporal Segment Network Xue Bai, Enqing Chen and Haron Chweya Tinega EasyChair preprints are intended for rapid dissemination
EasyChair Preprint 730 Real-Time Action Recognition based on Enhanced Motion Vector Temporal Segment Network Xue Bai, Enqing Chen and Haron Chweya Tinega EasyChair preprints are intended for rapid dissemination
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Video Gesture Recognition with RGB-D-S Data Based on 3D Convolutional Networks
 Video Gesture Recognition with RGB-D-S Data Based on 3D Convolutional Networks August 16, 2016 1 Team details Team name FLiXT Team leader name Yunan Li Team leader address, phone number and email address:
Video Gesture Recognition with RGB-D-S Data Based on 3D Convolutional Networks August 16, 2016 1 Team details Team name FLiXT Team leader name Yunan Li Team leader address, phone number and email address:
Deep Learning in Visual Recognition. Thanks Da Zhang for the slides
 Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
3D Attention-Driven Depth Acquisition for Object Identification
 3D Attention-Driven Depth Acquisition for Object Identification Kai Xu, Yifei Shi, Lintao Zheng, Junyu Zhang, Min Liu, Hui Huang, Hao Su, Daniel Cohen-Or and Baoquan Chen National University of Defense
3D Attention-Driven Depth Acquisition for Object Identification Kai Xu, Yifei Shi, Lintao Zheng, Junyu Zhang, Min Liu, Hui Huang, Hao Su, Daniel Cohen-Or and Baoquan Chen National University of Defense
Flow-Based Video Recognition
 Flow-Based Video Recognition Jifeng Dai Visual Computing Group, Microsoft Research Asia Joint work with Xizhou Zhu*, Yuwen Xiong*, Yujie Wang*, Lu Yuan and Yichen Wei (* interns) Talk pipeline Introduction
Flow-Based Video Recognition Jifeng Dai Visual Computing Group, Microsoft Research Asia Joint work with Xizhou Zhu*, Yuwen Xiong*, Yujie Wang*, Lu Yuan and Yichen Wei (* interns) Talk pipeline Introduction
DEEP LEARNING REVIEW. Yann LeCun, Yoshua Bengio & Geoffrey Hinton Nature Presented by Divya Chitimalla
 DEEP LEARNING REVIEW Yann LeCun, Yoshua Bengio & Geoffrey Hinton Nature 2015 -Presented by Divya Chitimalla What is deep learning Deep learning allows computational models that are composed of multiple
DEEP LEARNING REVIEW Yann LeCun, Yoshua Bengio & Geoffrey Hinton Nature 2015 -Presented by Divya Chitimalla What is deep learning Deep learning allows computational models that are composed of multiple
Deep Learning for Computer Vision II
 IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
Multimodal Gesture Recognition using Multi-stream Recurrent Neural Network
 Multimodal Gesture Recognition using Multi-stream Recurrent Neural Network Noriki Nishida, Hideki Nakayama Machine Perception Group Graduate School of Information Science and Technology The University
Multimodal Gesture Recognition using Multi-stream Recurrent Neural Network Noriki Nishida, Hideki Nakayama Machine Perception Group Graduate School of Information Science and Technology The University
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Constrained Convolutional Neural Networks for Weakly Supervised Segmentation. Deepak Pathak, Philipp Krähenbühl and Trevor Darrell
 Constrained Convolutional Neural Networks for Weakly Supervised Segmentation Deepak Pathak, Philipp Krähenbühl and Trevor Darrell 1 Multi-class Image Segmentation Assign a class label to each pixel in
Constrained Convolutional Neural Networks for Weakly Supervised Segmentation Deepak Pathak, Philipp Krähenbühl and Trevor Darrell 1 Multi-class Image Segmentation Assign a class label to each pixel in
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Two-Stream Convolutional Networks for Action Recognition in Videos
 Two-Stream Convolutional Networks for Action Recognition in Videos Karen Simonyan Andrew Zisserman Cemil Zalluhoğlu Introduction Aim Extend deep Convolution Networks to action recognition in video. Motivation
Two-Stream Convolutional Networks for Action Recognition in Videos Karen Simonyan Andrew Zisserman Cemil Zalluhoğlu Introduction Aim Extend deep Convolution Networks to action recognition in video. Motivation
List of Accepted Papers for ICVGIP 2018
 List of Accepted Papers for ICVGIP 2018 Paper ID ACM Article Title 3 1 PredGAN - A deep multi-scale video prediction framework for anomaly detection in videos 7 2 Handwritten Essay Grading on Mobiles using
List of Accepted Papers for ICVGIP 2018 Paper ID ACM Article Title 3 1 PredGAN - A deep multi-scale video prediction framework for anomaly detection in videos 7 2 Handwritten Essay Grading on Mobiles using
Crowd Scene Understanding with Coherent Recurrent Neural Networks
 Crowd Scene Understanding with Coherent Recurrent Neural Networks Hang Su, Yinpeng Dong, Jun Zhu May 22, 2016 Hang Su, Yinpeng Dong, Jun Zhu IJCAI 2016 May 22, 2016 1 / 26 Outline 1 Introduction 2 LSTM
Crowd Scene Understanding with Coherent Recurrent Neural Networks Hang Su, Yinpeng Dong, Jun Zhu May 22, 2016 Hang Su, Yinpeng Dong, Jun Zhu IJCAI 2016 May 22, 2016 1 / 26 Outline 1 Introduction 2 LSTM
Deep Learning For Video Classification. Presented by Natalie Carlebach & Gil Sharon
 Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
GPU Accelerated Sequence Learning for Action Recognition. Yemin Shi
 GPU Accelerated Sequence Learning for Action Recognition Yemin Shi shiyemin@pku.edu.cn 2018-03 1 Background Object Recognition (Image Classification) Action Recognition (Video Classification) Action Recognition
GPU Accelerated Sequence Learning for Action Recognition Yemin Shi shiyemin@pku.edu.cn 2018-03 1 Background Object Recognition (Image Classification) Action Recognition (Video Classification) Action Recognition
International Journal of Computer Engineering and Applications, Volume XII, Special Issue, September 18,
 REAL-TIME OBJECT DETECTION WITH CONVOLUTION NEURAL NETWORK USING KERAS Asmita Goswami [1], Lokesh Soni [2 ] Department of Information Technology [1] Jaipur Engineering College and Research Center Jaipur[2]
REAL-TIME OBJECT DETECTION WITH CONVOLUTION NEURAL NETWORK USING KERAS Asmita Goswami [1], Lokesh Soni [2 ] Department of Information Technology [1] Jaipur Engineering College and Research Center Jaipur[2]
Deep Learning. Roland Olsson
 Deep Learning Roland Olsson The first deep learning success Classifying handwritten digits Published test error rates without preprocessing for the MNIST dataset 12% for linear discriminants 3.3% for 40
Deep Learning Roland Olsson The first deep learning success Classifying handwritten digits Published test error rates without preprocessing for the MNIST dataset 12% for linear discriminants 3.3% for 40
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
 Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
End-to-end Driving Controls Predictions from Images
 End-to-end Driving Controls Predictions from Images Jan Felix Heyse and Maxime Bouton CS229 Final Project Report December 17, 2016 Abstract Autonomous driving is a promising technology to improve transportation
End-to-end Driving Controls Predictions from Images Jan Felix Heyse and Maxime Bouton CS229 Final Project Report December 17, 2016 Abstract Autonomous driving is a promising technology to improve transportation
Object Classification for Video Surveillance
 Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Segmentation-free Vehicle License Plate Recognition using ConvNet-RNN
 Segmentation-free Vehicle License Plate Recognition using ConvNet-RNN Teik Koon Cheang (Author) cheangtk@1utar.my Yong Shean Chong yshean@1utar.my Yong Haur Tay tayyh@utar.edu.my Abstract While vehicle
Segmentation-free Vehicle License Plate Recognition using ConvNet-RNN Teik Koon Cheang (Author) cheangtk@1utar.my Yong Shean Chong yshean@1utar.my Yong Haur Tay tayyh@utar.edu.my Abstract While vehicle
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
USING DEEP LEARNING TECHNOLOGIES TO PROVIDE DESCRIPTIVE METADATA FOR LIVE VIDEO CONTENTS
 USING DEEP LEARNING TECHNOLOGIES TO PROVIDE DESCRIPTIVE METADATA FOR LIVE VIDEO CONTENTS A. Maraga, V. Zamboni Metaliquid, Italy ABSTRACT As the consumption of video contents rises and consumers behaviour
USING DEEP LEARNING TECHNOLOGIES TO PROVIDE DESCRIPTIVE METADATA FOR LIVE VIDEO CONTENTS A. Maraga, V. Zamboni Metaliquid, Italy ABSTRACT As the consumption of video contents rises and consumers behaviour
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs
 Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
A Multi-Stream Bi-Directional Recurrent Neural Network for Fine-Grained Action Detection
 A Multi-Stream Bi-Directional Recurrent Neural Network for Fine-Grained Action Detection Bharat Singh U. of Maryland bharat@cs.umd.edu Tim K. Marks Michael Jones Oncel Tuzel Mitsubish Electric Research
A Multi-Stream Bi-Directional Recurrent Neural Network for Fine-Grained Action Detection Bharat Singh U. of Maryland bharat@cs.umd.edu Tim K. Marks Michael Jones Oncel Tuzel Mitsubish Electric Research
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Recurrent Neural Nets II
 Recurrent Neural Nets II Steven Spielberg Pon Kumar, Tingke (Kevin) Shen Machine Learning Reading Group, Fall 2016 9 November, 2016 Outline 1 Introduction 2 Problem Formulations with RNNs 3 LSTM for Optimization
Recurrent Neural Nets II Steven Spielberg Pon Kumar, Tingke (Kevin) Shen Machine Learning Reading Group, Fall 2016 9 November, 2016 Outline 1 Introduction 2 Problem Formulations with RNNs 3 LSTM for Optimization
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Deep Learning. Deep Learning provided breakthrough results in speech recognition and image classification. Why?
 Data Mining Deep Learning Deep Learning provided breakthrough results in speech recognition and image classification. Why? Because Speech recognition and image classification are two basic examples of
Data Mining Deep Learning Deep Learning provided breakthrough results in speech recognition and image classification. Why? Because Speech recognition and image classification are two basic examples of
A NEW COMPUTING ERA JENSEN HUANG, FOUNDER & CEO GTC CHINA 2017
 A NEW COMPUTING ERA JENSEN HUANG, FOUNDER & CEO GTC CHINA 2017 TWO FORCES DRIVING THE FUTURE OF COMPUTING 10 7 Transistors (thousands) 10 6 10 5 1.1X per year 10 4 10 3 10 2 1.5X per year Single-threaded
A NEW COMPUTING ERA JENSEN HUANG, FOUNDER & CEO GTC CHINA 2017 TWO FORCES DRIVING THE FUTURE OF COMPUTING 10 7 Transistors (thousands) 10 6 10 5 1.1X per year 10 4 10 3 10 2 1.5X per year Single-threaded
A new approach for supervised power disaggregation by using a deep recurrent LSTM network
 A new approach for supervised power disaggregation by using a deep recurrent LSTM network GlobalSIP 2015, 14th Dec. Lukas Mauch and Bin Yang Institute of Signal Processing and System Theory University
A new approach for supervised power disaggregation by using a deep recurrent LSTM network GlobalSIP 2015, 14th Dec. Lukas Mauch and Bin Yang Institute of Signal Processing and System Theory University
Geometry-aware Traffic Flow Analysis by Detection and Tracking
 Geometry-aware Traffic Flow Analysis by Detection and Tracking 1,2 Honghui Shi, 1 Zhonghao Wang, 1,2 Yang Zhang, 1,3 Xinchao Wang, 1 Thomas Huang 1 IFP Group, Beckman Institute at UIUC, 2 IBM Research,
Geometry-aware Traffic Flow Analysis by Detection and Tracking 1,2 Honghui Shi, 1 Zhonghao Wang, 1,2 Yang Zhang, 1,3 Xinchao Wang, 1 Thomas Huang 1 IFP Group, Beckman Institute at UIUC, 2 IBM Research,
Towards Large-Scale Semantic Representations for Actionable Exploitation. Prof. Trevor Darrell UC Berkeley
 Towards Large-Scale Semantic Representations for Actionable Exploitation Prof. Trevor Darrell UC Berkeley traditional surveillance sensor emerging crowd sensor Desired capabilities: spatio-temporal reconstruction
Towards Large-Scale Semantic Representations for Actionable Exploitation Prof. Trevor Darrell UC Berkeley traditional surveillance sensor emerging crowd sensor Desired capabilities: spatio-temporal reconstruction
Industrial Technology Research Institute, Hsinchu, Taiwan, R.O.C ǂ
 Stop Line Detection and Distance Measurement for Road Intersection based on Deep Learning Neural Network Guan-Ting Lin 1, Patrisia Sherryl Santoso *1, Che-Tsung Lin *ǂ, Chia-Chi Tsai and Jiun-In Guo National
Stop Line Detection and Distance Measurement for Road Intersection based on Deep Learning Neural Network Guan-Ting Lin 1, Patrisia Sherryl Santoso *1, Che-Tsung Lin *ǂ, Chia-Chi Tsai and Jiun-In Guo National
A Novel Representation and Pipeline for Object Detection
 A Novel Representation and Pipeline for Object Detection Vishakh Hegde Stanford University vishakh@stanford.edu Manik Dhar Stanford University dmanik@stanford.edu Abstract Object detection is an important
A Novel Representation and Pipeline for Object Detection Vishakh Hegde Stanford University vishakh@stanford.edu Manik Dhar Stanford University dmanik@stanford.edu Abstract Object detection is an important
A Quick Guide on Training a neural network using Keras.
 A Quick Guide on Training a neural network using Keras. TensorFlow and Keras Keras Open source High level, less flexible Easy to learn Perfect for quick implementations Starts by François Chollet from
A Quick Guide on Training a neural network using Keras. TensorFlow and Keras Keras Open source High level, less flexible Easy to learn Perfect for quick implementations Starts by François Chollet from
Real Time Monitoring of CCTV Camera Images Using Object Detectors and Scene Classification for Retail and Surveillance Applications
 Real Time Monitoring of CCTV Camera Images Using Object Detectors and Scene Classification for Retail and Surveillance Applications Anand Joshi CS229-Machine Learning, Computer Science, Stanford University,
Real Time Monitoring of CCTV Camera Images Using Object Detectors and Scene Classification for Retail and Surveillance Applications Anand Joshi CS229-Machine Learning, Computer Science, Stanford University,
MULTI-VIEW FEATURE FUSION NETWORK FOR VEHICLE RE- IDENTIFICATION
 MULTI-VIEW FEATURE FUSION NETWORK FOR VEHICLE RE- IDENTIFICATION Haoran Wu, Dong Li, Yucan Zhou, and Qinghua Hu School of Computer Science and Technology, Tianjin University, Tianjin, China ABSTRACT Identifying
MULTI-VIEW FEATURE FUSION NETWORK FOR VEHICLE RE- IDENTIFICATION Haoran Wu, Dong Li, Yucan Zhou, and Qinghua Hu School of Computer Science and Technology, Tianjin University, Tianjin, China ABSTRACT Identifying
Deep Learning Based Real-time Object Recognition System with Image Web Crawler
 , pp.103-110 http://dx.doi.org/10.14257/astl.2016.142.19 Deep Learning Based Real-time Object Recognition System with Image Web Crawler Myung-jae Lee 1, Hyeok-june Jeong 1, Young-guk Ha 2 1 Department
, pp.103-110 http://dx.doi.org/10.14257/astl.2016.142.19 Deep Learning Based Real-time Object Recognition System with Image Web Crawler Myung-jae Lee 1, Hyeok-june Jeong 1, Young-guk Ha 2 1 Department
Inception and Residual Networks. Hantao Zhang. Deep Learning with Python.
 Inception and Residual Networks Hantao Zhang Deep Learning with Python https://en.wikipedia.org/wiki/residual_neural_network Deep Neural Network Progress from Large Scale Visual Recognition Challenge (ILSVRC)
Inception and Residual Networks Hantao Zhang Deep Learning with Python https://en.wikipedia.org/wiki/residual_neural_network Deep Neural Network Progress from Large Scale Visual Recognition Challenge (ILSVRC)
Temporal Activity Detection in Untrimmed Videos with Recurrent Neural Networks
 Temporal Activity Detection in Untrimmed Videos with Recurrent Neural Networks Alberto Montes al.montes.gomez@gmail.com Santiago Pascual TALP Research Center santiago.pascual@tsc.upc.edu Amaia Salvador
Temporal Activity Detection in Untrimmed Videos with Recurrent Neural Networks Alberto Montes al.montes.gomez@gmail.com Santiago Pascual TALP Research Center santiago.pascual@tsc.upc.edu Amaia Salvador
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Analyzing the Relationship Between Head Pose and Gaze to Model Driver Visual Attention
 Analyzing the Relationship Between Head Pose and Gaze to Model Driver Visual Attention Sumit Jha and Carlos Busso Multimodal Signal Processing (MSP) Laboratory Department of Electrical Engineering, The
Analyzing the Relationship Between Head Pose and Gaze to Model Driver Visual Attention Sumit Jha and Carlos Busso Multimodal Signal Processing (MSP) Laboratory Department of Electrical Engineering, The
Designing a software framework for automated driving. Dr.-Ing. Sebastian Ohl, 2017 October 12 th
 Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Recurrent neural networks for polyphonic sound event detection in real life recordings
 Recurrent neural networks for polyphonic sound event detection in real life recordings Giambattista Parascandolo, Heikki Huttunen, Tuomas Virtanen Tampere University of Technology giambattista.parascandolo@tut.fi
Recurrent neural networks for polyphonic sound event detection in real life recordings Giambattista Parascandolo, Heikki Huttunen, Tuomas Virtanen Tampere University of Technology giambattista.parascandolo@tut.fi