Object Classification for Video Surveillance
|
|
|
- Noreen Thompson
- 5 years ago
- Views:
Transcription
1 Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center 1
2 Outline Part I: Object Classification in Far-field Video Part II: Large Scale Object Classification (Near-field / Still Images) 2
3 Part I Object Classification in Far-field Video 3

4 Motivation Object Classification in far-field video 4

5 Search for Pedestrians 5
6 6
7 7

8 Motivation Search for Trucks with Yellow Color Results locates DHL delivery trucks delivering mail at the IBM Hawthorne Facility 8
9 Far-field Object Classification: Why this is a Hard Problem? Illumination changes and shadows Arbitrary camera views Low-resolution imagery (objects are often less than 100 pixels in height; difficult to use e.g., SIFT features or parts-based approaches) Projective image distortion (cameras with large field-of-view) Groups of people may look like cars 9
10 Two Main Streams of Work for Far-Field Object Classification: 1) Methods that rely on moving object segmentation Use background subtraction to detect and track moving objects 2) Methods that do NOT use background modeling for classification Scan the entire video frame applying specialized detectors (e.g., car and pedestrian detectors) 10
11 Classification after Object Segmentation Assume static surveillance cameras Three main steps: Background Subtraction to detect moving object Track moving object Classify Object Track into car, person, etc. 11
12 Classification after Object Segmentation Constrained two-class object classification problem: discriminating vehicles from pedestrians. Key papers: Bose & Grimson, Improving Object Classification in Far-Field Video, CVPR 04 Lisa Brown, View-Independent Vehicle/Person Classification, WVSSN 04 12
13 Classification after Object Segmentation Simple Shape and Motion Descriptors Scene-dependent Features Foreground blob area (sensitive to perspective distortions) Aspect ratio (cars may have completely different aspect ratios depending on the pose frontal, side-view, etc.) Speed (cars may move slow just like people) Position and Direction of Motion (people and cars tend to occupy specific regions and follow different patterns of motion for different scenes) 13
14 Classification after Object Segmentation Simple Shape and Motion Descriptors Scene-independent Features Percentage Occupancy (number of silhouette pixels divided by the bounding box area) Direction of motion with respect to major axis direction (cars tend to move along the major axis direction) Shape Deformation (people tend to have large shape deformations than cars when moving) see recurrent motion image (next slide) 14
15 Classification after Object Segmentation Recurrent Motion Image [Omar Javed, ECCV 2002] Binary Silhouette image sequence for an object a Exclusive-or operator 15

16 Classification after Object Segmentation Recurrent Motion Image [Omar Javed, ECCV 2002] 16
17 Classification after Object Segmentation Recurrent Motion Image [Omar Javed, ECCV 2002] Pros: Scene-independent feature (Works for multiple camera views) Cons : Objects need to be aligned over the frames (translation and scale compensated) Morphology operations in foreground blobs obtained by background subtraction may complicate analysis of shape deformations 17
18 Classification after Object Segmentation Common Practice: Adaptation / Scene Transfer 1) Project a classifier based on scene-independent features (works for multiple camera views) 2) Deploy the classifier in a specific camera and let it run for hours 3) Select examples classified with high confidence 4) Use these examples to normalize scene-dependent features and retrain the classifier 18
19 Classification after Object Segmentation Incorporating appearance features So far we just considered shape and motion descriptors from the segmented object (foreground blob), which are limited to handle multiple object classes [Li et al, Real-time object classification in video surveillance based on appearance learning, CVPR 07] Local Binary Patterns + Adaboost Learning for appearance classification Moving objects are classified into 6 classes: car, van, truck, person, bike, and group of people Large training set is required 19

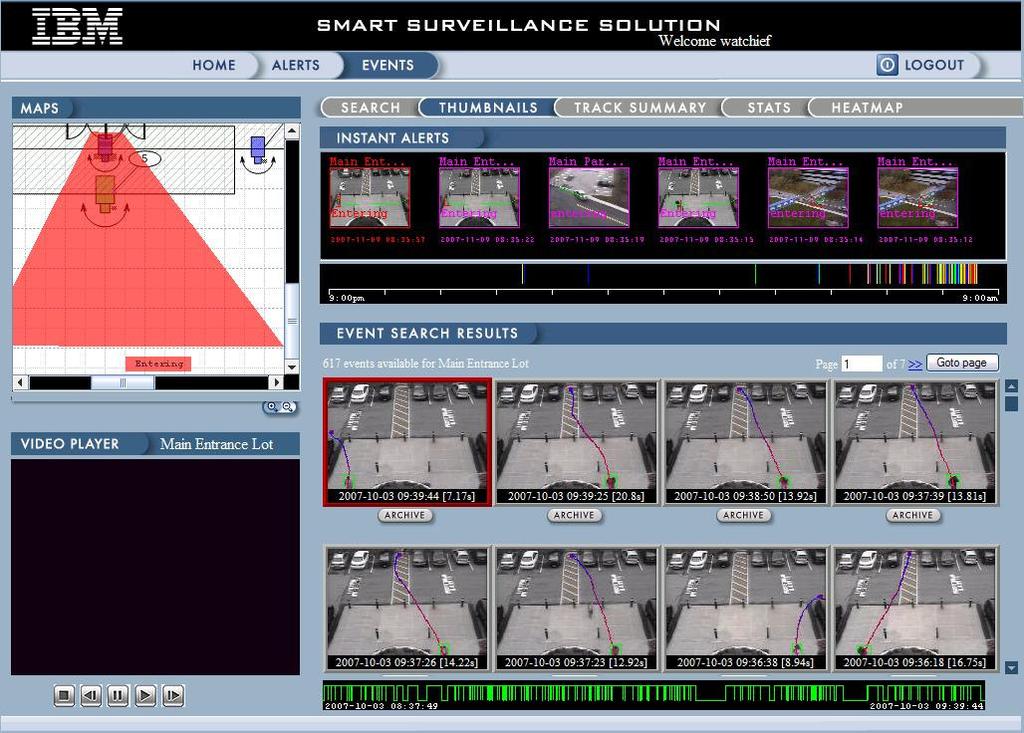
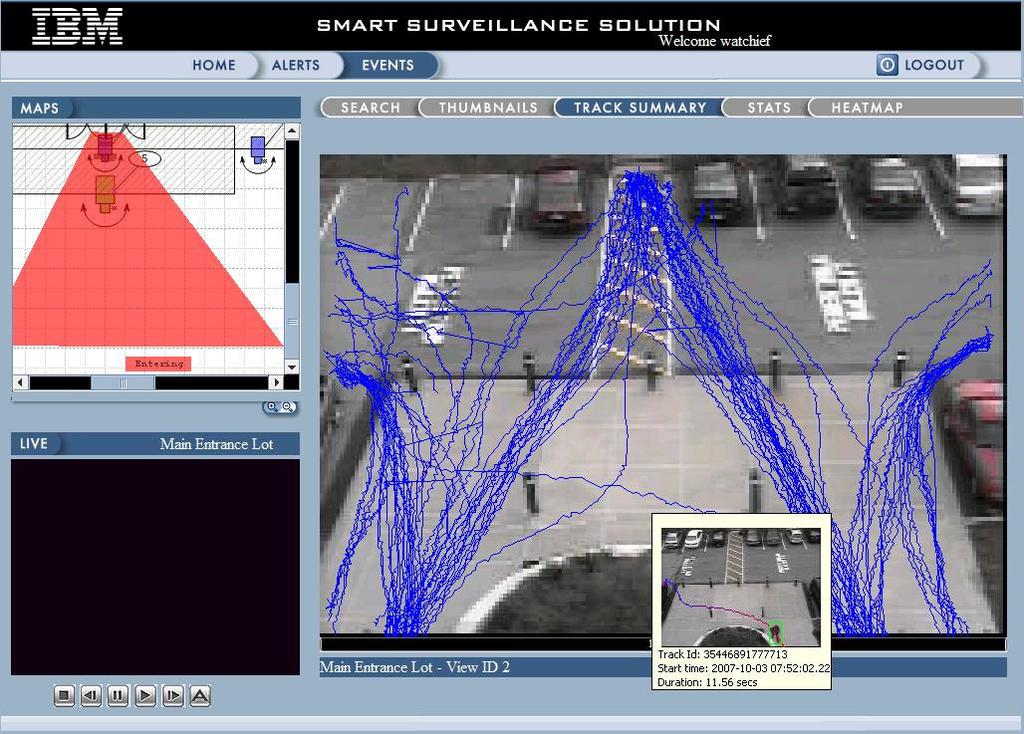
20 IBM System Interactive Interface User specifies Regions of Interest (ROI) for each class User specifies the size of objects in different locations of the image to compensate for projective distortions. 20
21 IBM System Bayesian Classifier Class Size Velocity Position Shape_Deformation Size P(s x,c) and Position P(x,C) distributions initially obtained from Interactive interface All distributions are adapted as new samples are classified 21
22 IBM System Shape Deformation feature Histograms of oriented gradients (HOG) eight bins corresponding to eight directions Differences of HOGs (or histogram intersection) tell how much the shape was deformed, without requiring precise alignment of bounding boxes (as in Recurrent Motion Image feature) Histogram Intersection: i = Frame Number j = Bin number 22

23 IBM System Shape Deformation feature 23
24 Two Main Streams of Work for Far-Field Object Classification: 1) Methods that rely on moving object segmentation Use background subtraction to detect and track moving objects 2) Methods that do NOT use background modeling for classification Scan the entire video frame applying specialized detectors (e.g., car and pedestrian detectors) 24
25 Pedestrian Detection Learning Patterns of Motion and Appearance [Viola et al, ICCV 03] Training Pairs (frame t and t+1) Appearance Filters: rectangle features applied in one of the images (exactly like in Viola/Jones face detector) Motion Filters: rectangle features applied in the following images: Adaboost learning is used to select discriminative appearance+motion filters 25

26 Pedestrian Detection Learning Patterns of Motion and Appearance [Viola et al, ICCV 03] Robust to shadows and low-resolution imagery 26
 Dynamic Detector (apperance+motion)")
27 Pedestrian Detection Learning Patterns of Motion and Appearance [Viola et al, ICCV 03] Static Detector (only appearance) Dynamic Detector (apperance+motion) 27
28 Pedestrian Detection Histograms of Oriented Gradients (HOG) for Human Detection [Dalal and Triggs, CVPR 05] State-of-the-art approach for pedestrian detection Dense grid of cells in the detection window. For each cell, compute HOG and train an SVM with the concatenated vector of HOGs SOURCE CODE: 28
 for Human Detection [Dalal and Triggs, CVPR 05]")
29 Pedestrian Detection Histograms of Oriented Gradients (HOG) for Human Detection [Dalal and Triggs, CVPR 05] 29

30 Pedestrian Detection Configuration estimates Improve Pedestrian Finding [Tran & Forsyth, NIPS 07] Structured Learning for detecting parts 30

31 Car Detection Local Statistics of Parts [Schneiderman, 2000] See Face Detection class for details about this method! 31
32 Summary 1) Methods that rely on moving object segmentation Fast and reliable approach for static cameras with few objects. These methods do not work for moving cameras or crowded scenes, where background subtraction results are not meaningful 2) Methods that do NOT use background modeling for classification Useful for crowded scenes and moving cameras. Work better under shadows and lighting changes. Training is very expensive (collecting samples and training time). More false positives and sometimes problems with generalization depending on the training/test set. Difficult to handle multiple object poses. 32
33 Part II Object Classification in Near-field Video 33

34 Motivation Object Classification in near-field video License Plate Recognition (LPR) 34

35 Motivation Object Classification in near-field video Recognizing Products in Retail Stores for Loss Prevention Veggie Vision - Loss Prevention in Self-Checkout 35


36 Motivation Object Classification in near-field video LaneHawk (check Evolution Robotics Retail Company) 36
37 Near-Field Object Classification We will briefly cover: 1) Shape-Based Methods 2) Methods Based on Bag of Words 37
![Shape-based Approaches Shape Context Matching [Belongie et al, 2000] Source Code:](/docs-images/87/97398472/images/38-2.jpg "http://www.eecs.berkeley.edu/research/projects/cs/vision/shape/sc_digits.htm l 38")
38 Shape-based Approaches Shape Context Matching [Belongie et al, 2000] Source Code: l 38
![Shape-based Approaches Shape Context Matching [Belongie et al, 2000]](/docs-images/87/97398472/images/39-2.jpg "Linear Assignment (Bipartite Graph Matching) for establishing")
39 Shape-based Approaches Shape Context Matching [Belongie et al, 2000] Linear Assignment (Bipartite Graph Matching) for establishing correspondences 39

 for establishing")
40 Shape-based Approaches Deformable Shape Matching [Berg et al, CVPR 2005] Quadratic Assignment (approximation, since NP-Hard) for establishing correspondences 40

41 Shape-based Approaches Deformable Shape Matching [Berg et al, CVPR 2005] 41

42 Shape-based Approaches Learning Graph Matching [Caetano et al, ICCV 07] Pairs of Labeled Matches as training 42
43 Shape-based Approaches Learning Graph Matching [Caetano et al, ICCV 07] Structured learning problem: given pair of graphs (shapes), predict a matching matrix that provide the best alignment They show that linear assignment (node-node consistency) with learning can match (or exceed) quadratic assignment (edge-edge consistency) without learning Source Code: Structured SVMs 43
44 Near-Field Object Classification We will briefly cover: 1) Shape-Based Methods 2) Methods Based on Bag of Words 44
45 Bag of Words Excellent Course: Recognizing and Learning Object Categories They have a much more detailed presentation about this topic, including Source Code! 45
46 Object Bag of words Slide from Fei-Fei Li 46
47 Analogy to documents Of all the sensory impressions proceeding to the brain, the visual experiences are the dominant ones. Our perception of the world around us is based essentially on the messages that reach the brain from our eyes. For a long time it was thought that the retinal image was transmitted sensory, point brain, by point to visual centers in the visual, brain; the perception, cerebral cortex was a movie screen, so to speak, upon which the image in retinal, the eye was cerebral projected. Through cortex, the discoveries of eye, Hubel cell, and Wiesel optical we now know that behind the origin of the visual perception in the nerve, brain there image is a considerably more complicated Hubel, course of Wiesel events. By following the visual impulses along their path to the various cell layers of the optical cortex, Hubel and Wiesel have been able to demonstrate that the message about the image falling on the retina undergoes a stepwise analysis in a system of nerve cells stored in columns. In this system each cell has its specific function and is responsible for a specific detail in the pattern of the retinal image. China is forecasting a trade surplus of $90bn ( 51bn) to $100bn this year, a threefold increase on 2004's $32bn. The Commerce Ministry said the surplus would be created by a predicted 30% jump in exports to $750bn, compared with a 18% rise in imports to $660bn. The figures China, are likely trade, to further annoy the surplus, US, which has commerce, long argued that China's exports are unfairly helped by a deliberately exports, undervalued imports, yuan. Beijing US, agrees the yuan, surplus bank, is too high, domestic, but says the yuan is only one factor. Bank of China governor Zhou foreign, Xiaochuan increase, said the country also needed to do trade, more to value boost domestic demand so more goods stayed within the country. China increased the value of the yuan against the dollar by 2.1% in July and permitted it to trade within a narrow band, but the US wants the yuan to be allowed to trade freely. However, Beijing has made it clear that it will take its time and tread carefully before allowing the yuan to rise further in value. Slide from Fei-Fei Li 47
48 Slide from Fei-Fei Li 48
 classifiers 49 Slide from Fei-Fei Li category")
49 learning recognition feature detection & representation codewords dictionary image representation category models (and/or) classifiers 49 Slide from Fei-Fei Li category decision
50 Bag of Words Feature Extraction (Interest Points / SIFT) Learning / Classification Generative Models Discriminative Classifiers 50
51 51
52 Generative Models based on Bag of Words See [Sivic et al, Discovering Object Categories in Image Collections, 2005] - Probabilistic Latent Semantic Analysis (plsa) - Latent Dirichlet Alocation (LDA) d D z w N face 52

53 Slide from Fei-Fei Li 53
54 Discriminative methods based on bag of words Grauman & Darrell, 2005, 2006: SVM w/ Pyramid Match kernels Others Csurka, Bray, Dance & Fan, 2004 Serre & Poggio,
55 Pyramid match kernel optimal partial matching between sets of features Grauman & Darrell, 2005, Slide credit: Kristen Grauman 55
56 Pyramid Match (Grauman & Darrell 2005) Histogram intersection Slide credit: Kristen Grauman 56
57 Pyramid Match (Grauman & Darrell 2005) Histogram intersection matches at this level matches at previous level Difference in histogram intersections across levels counts number of new pairs matched Slide credit: Kristen Grauman 57
58 Pyramid match kernel histogram pyramids measure of difficulty of a match at level i Weights inversely proportional to bin size Normalize kernel values to avoid favoring large sets Slide credit: Kristen Grauman number of newly matched pairs at level i 58
59 Example pyramid match Slide credit: Kristen Grauman Level 0 59
60 Example pyramid match Slide credit: Kristen Grauman Level 1 60


61 Example pyramid match Slide credit: Kristen Grauman Level 2 61
62 Example pyramid match pyramid match Slide credit: Kristen Grauman 62
63 Summary: Pyramid match kernel optimal partial matching between sets of features difficulty of a match at level i number of new matches at level i 63 Slide credit: Kristen Grauman
Pattern recognition (3)
") Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping
 Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Motivation: Analogy to Documents O f a l l t h e s e
Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Motivation: Analogy to Documents O f a l l t h e s e
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
Recognition with Bag-ofWords. (Borrowing heavily from Tutorial Slides by Li Fei-fei)
") Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Distances and Kernels. Motivation
 Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
CS 4495 Computer Vision Classification 3: Bag of Words. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
Indexing local features and instance recognition May 15 th, 2018
 Indexing local features and instance recognition May 15 th, 2018 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 15 th, 2018 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 16 th, 2017
 Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 14 th, 2015
 Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Lecture 14: Indexing with local features. Thursday, Nov 1 Prof. Kristen Grauman. Outline
 Lecture 14: Indexing with local features Thursday, Nov 1 Prof. Kristen Grauman Outline Last time: local invariant features, scale invariant detection Applications, including stereo Indexing with invariant
Lecture 14: Indexing with local features Thursday, Nov 1 Prof. Kristen Grauman Outline Last time: local invariant features, scale invariant detection Applications, including stereo Indexing with invariant
Today. Main questions 10/30/2008. Bag of words models. Last time: Local invariant features. Harris corner detector: rotation invariant detection
 Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Lecture 12 Visual recognition
 Lecture 12 Visual recognition Bag of words models for object recognition and classification Discriminative methods Generative methods Silvio Savarese Lecture 11 17Feb14 Challenges Variability due to: View
Lecture 12 Visual recognition Bag of words models for object recognition and classification Discriminative methods Generative methods Silvio Savarese Lecture 11 17Feb14 Challenges Variability due to: View
EECS 442 Computer vision. Object Recognition
 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Computer Vision: Algorithms
EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Computer Vision: Algorithms
Recognizing Object Instances. Prof. Xin Yang HUST
 Recognizing Object Instances Prof. Xin Yang HUST Applications Image Search 5 Years Old Techniques Applications For Toys Applications Traffic Sign Recognition Today: instance recognition Visual words quantization,
Recognizing Object Instances Prof. Xin Yang HUST Applications Image Search 5 Years Old Techniques Applications For Toys Applications Traffic Sign Recognition Today: instance recognition Visual words quantization,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Recognizing object instances
 Recognizing object instances UT-Austin Instance recognition Motivation visual search Visual words quantization, index, bags of words Spatial verification affine; RANSAC, Hough Other text retrieval tools
Recognizing object instances UT-Austin Instance recognition Motivation visual search Visual words quantization, index, bags of words Spatial verification affine; RANSAC, Hough Other text retrieval tools
Visual Navigation for Flying Robots. Structure From Motion
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Structure From Motion Dr. Jürgen Sturm VISNAV Oral Team Exam Date and Time Student Name Student Name Student Name Mon, July
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Structure From Motion Dr. Jürgen Sturm VISNAV Oral Team Exam Date and Time Student Name Student Name Student Name Mon, July
Feature Matching + Indexing and Retrieval
 CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
An Integrated System for Moving Object Classification in Surveillance Videos
 An Integrated System for Moving Object Classification in Surveillance Videos Longbin Chen U.C. at Santa Barbara Santa Barbara, CA 93117 lbchen@cs.ucsb.edu Rogerio Feris, Yun Zhai, Lisa Brown, Arun Hampapur
An Integrated System for Moving Object Classification in Surveillance Videos Longbin Chen U.C. at Santa Barbara Santa Barbara, CA 93117 lbchen@cs.ucsb.edu Rogerio Feris, Yun Zhai, Lisa Brown, Arun Hampapur
Recognizing object instances. Some pset 3 results! 4/5/2011. Monday, April 4 Prof. Kristen Grauman UT-Austin. Christopher Tosh.
 Recognizing object instances Some pset 3 results! Monday, April 4 Prof. UT-Austin Brian Bates Christopher Tosh Brian Nguyen Che-Chun Su 1 Ryu Yu James Edwards Kevin Harkness Lucy Liang Lu Xia Nona Sirakova
Recognizing object instances Some pset 3 results! Monday, April 4 Prof. UT-Austin Brian Bates Christopher Tosh Brian Nguyen Che-Chun Su 1 Ryu Yu James Edwards Kevin Harkness Lucy Liang Lu Xia Nona Sirakova
The bits the whirl-wind left out..
 The bits the whirl-wind left out.. Reading: Szeliski Background: 1 Edge Features Reading: Szeliski - 1.1 + 4.2.1 (Background: Ch 2 + 3.1 3.3) Background: 2 Edges as Gradients Edge detection = differential
The bits the whirl-wind left out.. Reading: Szeliski Background: 1 Edge Features Reading: Szeliski - 1.1 + 4.2.1 (Background: Ch 2 + 3.1 3.3) Background: 2 Edges as Gradients Edge detection = differential
Image Features and Categorization. Computer Vision Jia-Bin Huang, Virginia Tech
 Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Got your proposals! Thanks! Will reply with feedbacks this week. HW 4 Due 11:59pm on Wed,
Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Got your proposals! Thanks! Will reply with feedbacks this week. HW 4 Due 11:59pm on Wed,
Instance recognition
 Instance recognition Thurs Oct 29 Last time Depth from stereo: main idea is to triangulate from corresponding image points. Epipolar geometry defined by two cameras We ve assumed known extrinsic parameters
Instance recognition Thurs Oct 29 Last time Depth from stereo: main idea is to triangulate from corresponding image points. Epipolar geometry defined by two cameras We ve assumed known extrinsic parameters
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Image Features and Categorization. Computer Vision Jia-Bin Huang, Virginia Tech
 Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Proposal due 11:59 PM on Thursday, Oct 27 Submit via CANVAS Send a copy to Jia-Bin and
Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Proposal due 11:59 PM on Thursday, Oct 27 Submit via CANVAS Send a copy to Jia-Bin and
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Lecture 15: Object recognition: Bag of Words models & Part based generative models
 Lecture 15: Object recognition: Bag of Words models & Part based generative models Professor Fei Fei Li Stanford Vision Lab 1 Basic issues Representation How to represent an object category; which classification
Lecture 15: Object recognition: Bag of Words models & Part based generative models Professor Fei Fei Li Stanford Vision Lab 1 Basic issues Representation How to represent an object category; which classification
Introduction to Object Recognition & Bag of Words (BoW) Models
 Models") : Introduction to Object Recognition & Bag of Words (BoW) Models Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction to object recognition Representation Learning Recognition
: Introduction to Object Recognition & Bag of Words (BoW) Models Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction to object recognition Representation Learning Recognition
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Shape Matching. Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007
 Shape Matching Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007 Outline Introduction and Background Uses of shape matching Kinds of shape matching Support Vector Machine (SVM) Matching with
Shape Matching Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007 Outline Introduction and Background Uses of shape matching Kinds of shape matching Support Vector Machine (SVM) Matching with
Face Detection and Alignment. Prof. Xin Yang HUST
 Face Detection and Alignment Prof. Xin Yang HUST Many slides adapted from P. Viola Face detection Face detection Basic idea: slide a window across image and evaluate a face model at every location Challenges
Face Detection and Alignment Prof. Xin Yang HUST Many slides adapted from P. Viola Face detection Face detection Basic idea: slide a window across image and evaluate a face model at every location Challenges
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Human Motion Detection and Tracking for Video Surveillance
 Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
 5*4%),-
5*4%),- Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Templates and Background Subtraction. Prof. D. Stricker Doz. G. Bleser
 Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1 Surveillance Video: Example of multiple people tracking http://www.youtube.com/watch?v=inqv34bchem&feature=player_embedded As for
Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1 Surveillance Video: Example of multiple people tracking http://www.youtube.com/watch?v=inqv34bchem&feature=player_embedded As for
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Human-Robot Interaction
 Human-Robot Interaction Elective in Artificial Intelligence Lecture 6 Visual Perception Luca Iocchi DIAG, Sapienza University of Rome, Italy With contributions from D. D. Bloisi and A. Youssef Visual Perception
Human-Robot Interaction Elective in Artificial Intelligence Lecture 6 Visual Perception Luca Iocchi DIAG, Sapienza University of Rome, Italy With contributions from D. D. Bloisi and A. Youssef Visual Perception
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
TA Section: Problem Set 4
 TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Improving Recognition through Object Sub-categorization
 Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO
 FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO Makoto Arie, Masatoshi Shibata, Kenji Terabayashi, Alessandro Moro and Kazunori Umeda Course
FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO Makoto Arie, Masatoshi Shibata, Kenji Terabayashi, Alessandro Moro and Kazunori Umeda Course
Generic Object-Face detection
 Generic Object-Face detection Jana Kosecka Many slides adapted from P. Viola, K. Grauman, S. Lazebnik and many others Today Window-based generic object detection basic pipeline boosting classifiers face
Generic Object-Face detection Jana Kosecka Many slides adapted from P. Viola, K. Grauman, S. Lazebnik and many others Today Window-based generic object detection basic pipeline boosting classifiers face
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Multiple Kernel Learning for Emotion Recognition in the Wild
 Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Lecture 18: Human Motion Recognition
 Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Class 9 Action Recognition
 Class 9 Action Recognition Liangliang Cao, April 4, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 9 Action Recognition Liangliang Cao, April 4, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Object detection as supervised classification
 Object detection as supervised classification Tues Nov 10 Kristen Grauman UT Austin Today Supervised classification Window-based generic object detection basic pipeline boosting classifiers face detection
Object detection as supervised classification Tues Nov 10 Kristen Grauman UT Austin Today Supervised classification Window-based generic object detection basic pipeline boosting classifiers face detection
Person Detection in Images using HoG + Gentleboost. Rahul Rajan June 1st July 15th CMU Q Robotics Lab
 Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications
 Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Boosting Object Detection Performance in Crowded Surveillance Videos
 Boosting Object Detection Performance in Crowded Surveillance Videos Rogerio Feris, Ankur Datta, Sharath Pankanti IBM T. J. Watson Research Center, New York Contact: Rogerio Feris (rsferis@us.ibm.com)
Boosting Object Detection Performance in Crowded Surveillance Videos Rogerio Feris, Ankur Datta, Sharath Pankanti IBM T. J. Watson Research Center, New York Contact: Rogerio Feris (rsferis@us.ibm.com)
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Artistic ideation based on computer vision methods
 Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Histograms of Oriented Gradients for Human Detection p. 1/1
 Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
Spatial Latent Dirichlet Allocation
 Spatial Latent Dirichlet Allocation Xiaogang Wang and Eric Grimson Computer Science and Computer Science and Artificial Intelligence Lab Massachusetts Tnstitute of Technology, Cambridge, MA, 02139, USA
Spatial Latent Dirichlet Allocation Xiaogang Wang and Eric Grimson Computer Science and Computer Science and Artificial Intelligence Lab Massachusetts Tnstitute of Technology, Cambridge, MA, 02139, USA
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
CS 231A Computer Vision (Winter 2018) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Learning Detectors from Large Datasets for Object Retrieval in Video Surveillance
 Learning Detectors from Large Datasets for Object Retrieval in Video Surveillance Rogerio Feris, Sharath Pankanti IBM T. J. Watson Research Center {rsferis,sharat}@us.ibm.com Behjat Siddiquie SRI International
Learning Detectors from Large Datasets for Object Retrieval in Video Surveillance Rogerio Feris, Sharath Pankanti IBM T. J. Watson Research Center {rsferis,sharat}@us.ibm.com Behjat Siddiquie SRI International
Local Features based Object Categories and Object Instances Recognition
 Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE
 PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Action recognition in videos
 Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Real-Time Human Detection using Relational Depth Similarity Features
 Real-Time Human Detection using Relational Depth Similarity Features Sho Ikemura, Hironobu Fujiyoshi Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai, Aichi, 487-8501 Japan. si@vision.cs.chubu.ac.jp,
Real-Time Human Detection using Relational Depth Similarity Features Sho Ikemura, Hironobu Fujiyoshi Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai, Aichi, 487-8501 Japan. si@vision.cs.chubu.ac.jp,
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
Pedestrian Detection and Tracking in Images and Videos
 Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
HOG-based Pedestriant Detector Training
 HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Co-occurrence Histograms of Oriented Gradients for Pedestrian Detection
 Co-occurrence Histograms of Oriented Gradients for Pedestrian Detection Tomoki Watanabe, Satoshi Ito, and Kentaro Yokoi Corporate Research and Development Center, TOSHIBA Corporation, 1, Komukai-Toshiba-cho,
Co-occurrence Histograms of Oriented Gradients for Pedestrian Detection Tomoki Watanabe, Satoshi Ito, and Kentaro Yokoi Corporate Research and Development Center, TOSHIBA Corporation, 1, Komukai-Toshiba-cho,
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Human Detection. A state-of-the-art survey. Mohammad Dorgham. University of Hamburg
 Human Detection A state-of-the-art survey Mohammad Dorgham University of Hamburg Presentation outline Motivation Applications Overview of approaches (categorized) Approaches details References Motivation
Human Detection A state-of-the-art survey Mohammad Dorgham University of Hamburg Presentation outline Motivation Applications Overview of approaches (categorized) Approaches details References Motivation
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Previously. Window-based models for generic object detection 4/11/2011
 Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Detecting and Segmenting Humans in Crowded Scenes
 Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Fast and Stable Human Detection Using Multiple Classifiers Based on Subtraction Stereo with HOG Features
 2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China Fast and Stable Human Detection Using Multiple Classifiers Based on
2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China Fast and Stable Human Detection Using Multiple Classifiers Based on
CS4495/6495 Introduction to Computer Vision. 8C-L1 Classification: Discriminative models
 CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
 https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Human detections using Beagle board-xm
 Human detections using Beagle board-xm CHANDAN KUMAR 1 V. AJAY KUMAR 2 R. MURALI 3 1 (M. TECH STUDENT, EMBEDDED SYSTEMS, DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING, VIJAYA KRISHNA INSTITUTE
Human detections using Beagle board-xm CHANDAN KUMAR 1 V. AJAY KUMAR 2 R. MURALI 3 1 (M. TECH STUDENT, EMBEDDED SYSTEMS, DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING, VIJAYA KRISHNA INSTITUTE
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding