arxiv: v1 [cs.cv] 13 Dec 2018
|
|
|
- Irma Leonard
- 5 years ago
- Views:
Transcription
1 IPOD: Intensive Point-based Object Detector for Point Cloud Zetong Yang Yanan Sun Shu Liu Xiaoyong Shen Jiaya Jia, Youtu Lab, Tencent The Chinese University of Hong Kong {tomztyang, now.syn, liushuhust, arxiv: v1 [cs.cv] 13 Dec 2018 Abstract We present a novel 3D object detection framework, named IPOD, based on raw point cloud. It seeds object proposal for each point, which is the basic element. This paradigm provides us with high recall and high fidelity of information, leading to a suitable way to process point cloud data. We design an end-to-end trainable architecture, where features of all points within a proposal are extracted from the backbone network and achieve a proposal feature for final bounding inference. These features with both context information and precise point cloud coordinates yield improved performance. We conduct experiments on KITTI dataset, evaluating our performance in terms of 3D object detection, Bird s Eye View (BEV) detection and 2D object detection. Our method accomplishes new state-of-the-art, showing great advantage on the hard set. 1. Introduction Great breakthrough has been made in 2D image recognition tasks [14, 25, 24, 9] with the development of Convolutional Neural Networks (CNNs). Meanwhile, 3D scene understanding with point cloud also becomes an important topic, since it can benefit many applications, such as autonomous driving [13] and augmented reality [27]. In this work, we focus on one of the most important 3D scene recognition tasks that is, 3D object detection based on point cloud, which predicts the 3D bounding box and class label for each object in the scene. Challenges Different from RGB images, LiDAR point cloud is with its unique properties. On the one hand, they provide more spatial and structural information including precise depth and relative location. On the other hand, they are sparse, unordered, and even not uniformly distributed, bringing huge challenge to 3D recognition tasks. To deploy CNNs, most existing methods convert 3D point clouds to images by projection [4, 19, 15, 28, 10] or voxelize cloud with a fixed grid [26, 32, 35]. With the compact representation, CNN is applied. Nevertheless, these hand-crafted representations may not be always optimal regarding the detection performance. Along another line, F- PointNet [29] crops point cloud in a frustum determined by 2D object detection results. Then a PointNet [30] is applied on each frustum to produce 3D results. The performance of this pipeline heavily relies on the image detection results. Moreover, it is easily influenced by large occlusion and clutter objects, which is the general weakness of 2D object detectors. Our Contribution To address aforementioned drawbacks, we propose a new paradigm based on raw point cloud for 3D object detection. We take each point in the cloud as the element and seed them with object proposals. The raw point cloud, without any approximation, is taken as input to keep sufficient information. This design is general and fundamental for point cloud data, and is able to handle occlusion and clutter scenes. We note it is nontrivial to come up with such a solution due to the well-known challenges of heavily redundant proposals and ambiguity on assigning corresponding groundtruth labels. Our novelty is on a proposal generation module to output proposals based on each point and effective selection of representative object proposals with corresponding ground-truth labels to ease network training. Accordingly, the new structure extracts both context and local information for each proposal, which is then fed to a tiny PointNet to infer final results. We evaluate our model on 2D detection, Bird s Eye View (BEV) detection, and 3D detection tasks on KITTI benchmark [1]. Experiments show that our model outperforms state-of-the-art LIDAR based 3D object detection frameworks especially for difficult examples. Our experiments also surprisingly achieve extremely high recall without the common projection operations. Our primary contribution is manifold. We propose a new proposal generation paradigm for point cloud based object detector. It is a natural and general design, which does not need image detection while yielding much higher recall compared with widely used voxel and projection-based methods. 1



2 2D Image Semantic Segmentatioion Point-Based Proposal Generation PointNet++ Feature Extractor (B, N, 4) (B, N, C) Proposal Feature Generation Box Prediction Network Cls Reg Figure 1. Illustration of our framework. It consists of three different parts. The first is a subsampling network to filter out most background points. The second part is for point-based proposal generation. The third component is the network architecture, which is composed of backbone network, proposal feature generation module and a box prediction network. It classifies and regresses generated proposals. A network structure with input of raw point cloud is proposed to produce features with both context and local information. Experiments on KITTI datasets show that our framework better handles many hard cases with highly occluded and crowded objects, and achieves new stateof-the-art performance. 2. Related Work 3D Semantic Segmentation There have been several approaches to tackle semantic segmentation on point cloud. In [33], a projection function converts LIDAR points to a UV map, which is then classified by 2D semantic segmentation [33, 34, 3] in pixel level. In [8, 7], a multi-view based function produces the segmentation mask. The method fuses information from different views. Other solutions, such as [31, 30, 22, 17, 21], segment the point cloud from raw LI- DAR data. They directly generate features on each point while keeping original structural information. Specifically, a max-pooling method gathers the global feature; it is then concatenated with local feature for processing. 3D Object Detection There are roughly three different lines for 3D object detection. They are voxel-grid based, multi-view based and PointNet based methods. V oxel-grid Method: There are several LIDAR-data based 3D object detection frameworks using voxel-grid representation. In [32], each non-empty voxel is encoded with 6 statistical quantities by the points within this voxel. A binary encoding is used in [20] for each voxel grid. They utilized hand-crafted representation. VoxelNet [35] instead stacks many VFE layers to generate machine-learned representation for each voxel. M ulti-view Method: MV3D [4] projected LIDAR point cloud to BEV and trained a Region Proposal Network (RPN) to generate positive proposals. Afterwards, it merged features from BEV, image view and front view in order to generate refined 3D bounding boxes. AVOD [19] improved MV3D by fusing image and BEV features like [23]. Unlike MV3D, which only merges features in the refinement phase, it also merges features from multiple views in the RPN phase to generate more accurate positive proposals. However, these methods still have the limitation when detecting small objects such as pedestrians and cyclists. They do not handle several cases that have multiple objects in depth direction. P ointnet Method: F-PointNet [29] is the first method of utilizing raw point cloud to predict 3D objects. Initially, a 2D object detection module [11] is applied to generate frustum proposals. Then it crops points and passes them into an instance segmentation module. At last, it regresses 3D bounding boxes by the positive points output from the segmentation module. Final performance heavily relies on the detection results from the 2D object detector. In contrast, our design is general and effective to utilize the strong representation power of point cloud. 3. Our Framework Our method aims to regress the 3D object bounding box from the easy-to-get point-based object proposals, which is a natural design for point cloud based object detection. To make it feasible, we design new strategies to reduce redundancy and ambiguity existing introduced by trivially seeding proposals for each point. After generating proposals, we extract features for final inference. Our framework is illustrated in Figure Point-based Proposal Generation The point cloud gathered from LiDAR is unordered, making it nontrivial to utilize the powerful CNN to achieve good performance. Existing methods mainly project point cloud to different views or divide them into voxels, transforming them into a compact structure. We instead choose a more general strategy to seed object proposals based on each point independently, which is the elementary component in the point cloud. Then we process raw point cloud directly. As a result, precise localization information and a
 A C B GT A B (c) Figure 2. Illustration of point-based proposal generation.")
3 b a c e d f (a) Figure 3. Illustration of proposal generation on each point from BEV. We totally generate 6 proposals based on 2 different anchors with angle of 0 or 90 degree. For each fundamental anchor, we use 3 different shifts along horizontal axis at ratios of -0.5, 0 and 0.5. (b) A C B GT A B (c) Figure 2. Illustration of point-based proposal generation. (a) Semantic segmentation result on the image. (b) Projected segmentation result on point cloud. (c) Point-based proposals on positive points after NMS. high recall are maintained, i.e., achieving a 96.0% recall on KITTI[12] dataset. Challenges Albeit elegant, point-based frameworks inevitably face many challenges. For example, the amount of points is prohibitively huge and high redundancy exists between different proposals. They cost much computation during training and inference. Also, ambiguity of regression results and assigning ground-truth labels for nearby proposals need to be resolved. Selecting Positive Points The first step is to filter out background points in our framework. We use a 2D semantic segmentation network named subsampling network to predict the foreground pixels and then project them into point cloud as a mask with the given camera matrix to gather positive points. As shown in Figure 2, the positive points within a bounding box are clustered. We generate proposals at the center of each point with multiple scales, angles and shift, which is illustrated in Figure 3. These proposals can cover most of the points within a car. Reducing Proposal Redundancy After background point removal, around 60K proposals are left; but many of them are redundant. We conduct non-maximum suppression (NMS) to remove the redundancy. The score for each proposal is the sum of semantic segmentation scores of interior points, making it possible to select proposals with a relatively large number of points. The intersection-over-union (IoU) value is calculated based on the projection of each proposal to the BEV. With these operations, we reduce the (a) (b) Figure 4. Illustration of paradox situations. (a) Different proposals with the same output. (b) True positive proposal assigned to a negative label. number of effective proposals to around 500 while keeping a high recall. Reduction of Ambiguity There are cases that two different proposals contain the same set of points, as shown in Figure 4(a). Since the feature for each proposal is produced using the interior points, these proposals thus possess the same feature representation, leading to the same classification or regression prediction and yet different bounding box regression results. To eliminate this contradiction, we align these two proposals by replacing their sizes and centers with pre-defined class-specific anchor size and the center of the set of interior points. As illustrated in Figure 4(a), the two different proposals A and B are aligned with these steps to proposal C. Another ambiguity lies on assigning target labels to proposals during training. It is not appropriate to assign positive and negative labels considering only IoU values between proposals and ground-truth boxes, as what is performed in 2D object detector. As shown by Figure 4(b), proposal A contains all points within a ground-truth box and overlaps with this box heavily. It is surely a good positive proposal. Contrarily, proposal B is with a low IoU value and yet contains most of the ground-truth points. With the criterion in 2D detector only considering box IoU, proposal B is negative. Note in our point-based settings, interior points are with much more importance. It is unreasonable to consider the bounding box IoU. Our solution is to design a new criterion named PointsIoU to assign target labels. PointsIoU is defined as the quotient between the number of points in the intersection area of both boxes and the number of points in the union area of both boxes. According to PointsIoU, both proposals
4 crop (B, N, C) (B,M,C) Normalize Concat (B,M,C+3) T-Net (B,3) (B,M,C+3) crop (B, N, 3) (B,M,3) (B,M,3) Figure 5. Illustration of proposal feature generation module. It combines location information and context feature to generate offsets from the centroid of interior points to the center of target instance object. The predicted residuals are added back to the location information in order to make feature more robust to geometric transformation. (B,M,3) in Figure 4(b) are now positive Network Architecture Accurate object detection requires the network to be able to produce correct class label with precise localization information for each instance. As a result, our network needs to be aware of context information to help classification and utilize fine-grained location in raw point cloud. Our network takes entire point cloud as input and produces the feature representation for each proposal. As shown in Figure 1, our network consists of a backbone, a proposal feature generation module and a box prediction network. Backbone Network The backbone network based on PointNet++ [31] takes entire point cloud, with each point parameterized by coordinate and reflectance value, i.e., ([x, y, z, r]). The network is composed of a number of set abstraction () levels and feature propagation (FP) layers, effectively gathering local features from neighboring points and enlarging the receptive field for each point. For N 4 input points, the network outputs the feature map with size N C where each row represents one point. Computation is shared by all different proposals, greatly reducing computation. Since features are generated from the raw points, no voxel projection is needed. The detail of our backbone network is shown in Figure 6(a). Proposal Feature Generation The feature of each proposal has two parts, as shown in Figure 5. The first is cropped from the extracted feature map. Specifically, for each proposal, we randomly select M = 512 points. Then we take corresponding feature vector with size M C and denoted it as F 1. With the and FP operations in Point- Net++, these features well capture context information. Besides this high-level abstraction, point location is also with great importance. Our second part is the proposal feature F 2, the canonized coordinates of the M selected points. Compared with the original coordinates, the canonized ones are more robust to the geometric transformation. We utilize T-Net, which is one type of supervised Spatial Transformation Network (STN) [16], to calculate residuals from proposal center to real object center, denoted as C ctr. The input to T-Net is the concatenation of part 1 of proposal feature F 1 and the M points corresponding XY Z coordinates, normalized by subtracting the center coordinates of these M points. As shown in Figure 5, part 2 of proposal feature is the canonized coordinates of these M points, calculated by normalized coordinates subtracting the center shift predicted by T-Net. The final proposal feature is the concatenation of F 1 and F 2. Bounding-Box Prediction Network In this module, for each proposal, we use a small PointNet++ to predict its class, size ratio, center residual as well as orientation. Detailed structure of our prediction network is illustrated in Figure 6(b). We utilize 3 modules with MLP layers for feature extraction. Then average pooling is used to produce the global feature. Two branches for regression and classification is applied. For size ratio, we directly regress the ratio of ground-truth size and the proposal s, parametrized by (t l, t h, t w ). We further predict the shift (t x, t y, t z ) from refined center by T-Net to ground-truth center. As a result, final center prediction is calculated by C pro + C ctr + Cctr, where C pro, C ctr and Cctr denote the center of proposal, prediction of T-Net and shift from bounding-box prediction network, respectively. For heading angle, we use a hybrid of classification and regression formulation following [29]. Specifically, we pre-define N a equally split angle bins and classify the proposal s angle into different bins. Residual is regressed with respect to the bin value. N a is set to 12 in our experiments. Loss Functions We use a multi-task loss to train our network. The loss function is defined as Eq. (1), where L cls is the labeled classification loss. L loc denotes location regression loss, L ang and L cor are angle and corner losses respectively. s i and u i are the predicted semantic score and ground-truth label for proposal i, respectively. N cls and
5 Input N x 4 Input M x 131 (MSG) 1024x128 r=0.2, c1 = [32, 32, 64] r=0.4, c2 = [64, 64, 128] r=0.8, c3 = [64, 96, 128] (MSG) 32x25 256x256 6 r = 0.4, c1 = [ 64, 64, 128] r = 0.8, c2 = [128, 128, 256] r = 1.6, c3 = [128, 128, 256] (SSG) r = 3.2 c = [128, 256, 1024] 64x1024 FP 256x128 FP 1024x128 c = [128, 128] c = [128, 128] FP Nx128 c = [128, 128] (SSG) r = 0.2 c = [64, 64, 128] 128x128 (SSG) r = 0.4 c = [128, 128, 256] 32x256 (SSG) r = inf c = [256, 256, 512] cls_fc1 c = 512 reg_fc1 c = 512 cls_fc2 cls_pred c = 256 reg_fc2 reg_pred c = 256 (a) Figure 6. Illustration of two network architectures. (a) Backbone architecture. It takes a raw point cloud (x, y, z, r) as input, and extracts both local and global features for each point by stacking layers and FP modules. (b) Bounding-box prediction network. It takes the feature from proposal feature generation module as input and produces classification and regression prediction. (b) N pos are the number of proposals and positive samples. L total = 1 L cls (s i, u i ) N cls i + λ 1 [u i 1](L loc + L ang + L cor ), N pos i The Iverson bracket indicator function [u i 1] reaches 1 when u i 1 and 0 otherwise. Note that we only determine if each proposal is positive or negative. L cls is simply the softmax cross-entropy loss. We parameterize a proposal p by its center (p x, p y, p z ), size (p l, p h, p w ), angle p θ and its assigned ground truth box g as (g x, g y, g z ), (g l, g h, g w ) and g θ. Location regression loss is composed of T-Net center estimation loss, center residual prediction loss and size residual prediction loss, expressed as L loc = L dis (t ctr, v ctr ) + L dis (t ctr, v ctr)+ L dis (t size, v size), where L dis is the smooth-l 1 loss. t ctr and t ctr are predicted center residuals by T-Net and regression network respectively, while v ctr and vctr are targets for them. t size is the predicted size ratio and vsize is the size ratio of groundtruth. The target of our network is defined as v ctr = g k p k, k (x, y, z) vctr = g k p k t k, k (x, y, z) (3) vsize = (g k p k )/p k, k (l, h, w) Angle loss includes orientation classification loss and residual prediction loss as (1) (2) L angle = L cls (t a cls, v a cls )+L dis (t a res, v a res ), (4) where t a cls and t a res are predicted angle class and residual while v a cls and v a res are their targets. Corner loss is the distance between the predicted 8 corners and assigned ground truth, expressed as 8 L corner = P vk P tk, (5) k=1 where P vk and P tk are the location of ground-truth and prediction for point k. 4. Experiments We evaluate our method on the widely employed KITTI Object Detection Benchmark [1]. There are 7,481 training images / point clouds and 7,518 test images / point clouds in three categories of Car, Pedestrian and Cyclist. We use the most widely used average precision (AP) metric to compare different methods. During evaluation, we follow the official KITTI evaluation protocol that is, the IoU threshold is 0.7 for class Car and 0.5 for Pedestrian and Cyclist Implementation Details Following [35, 19], we train two networks, one for car and the other for both pedestrian and cyclist. Positive Points Selection For semantic segmentation, which is used for foreground point selection, we use the Deeplab-v3 [3] based on X-ception [5] network trained on Cityscapes [6] due to the lack of semantic segmentation annotation in KITTI dataset. Pixels labeled as car, rider, person or bicycle are regarded as foreground. There is no class cyclist in Cityscapes. We thus combine bicycle and rider segmentation masks for cyclist. After getting positive masks, we project these pixels back to the 3D points and acquire foreground points. To align network input, we randomly choose N points per point cloud from foreground. If positive point number is less than N, we pad to N points from the negative points. During training and testing, we set N = 10K for the car detection model and N = 5K for the pedestrian and cyclist model. Anchor Sizes We define the anchor size (l a = 3.9, h a = 1.6, w a = 1.6) for car detection model, and sizes (l a = 1.6, h a = 1.6, w a = 0.8) and (l a = 0.8, h a = 1.6, w a = 0.8) for the other model. For each size, we use 2 different angles, and 3 shifts, yielding k = 6 proposals centered at the location of each point, as illustrated in Figure 3.
![Method Class AP 2D (%) AP BEV (%) AP 3D (%) Easy Moderate Hard Easy Moderate Hard Easy Moderate Hard MV3D [4] N/A N/A N/A 86.02 76.90 68.49 71.09 62.35 55.12 AVOD [19] 89.73 88.08 80.14 86.80 85.](/docs-images/95/123667307/images/6-0.jpg "44 77.73 73.59 65.78 58.38 VoxelNet [35] N/A N/A N/A 89.35 79.26 77.39 77.47 65.11 57.73 Car F-PointNet [29] 90.78 90.00 80.80 88.70 84.00 75.33 81.20 70.39 62.19 AVOD-FPN [19] 89.99 87.44 80.05 88.")
![53 83.79 77.90 81.94 71.88 66.38 Ours 90.20 89.30 87.37 86.93 83.98 77.85 79.75 72.57 66.33 AVOD [19] 51.64 43.49 37.79 42.51 35.24 33.97 38.28 31.51 26.98 VoxelNet [35] N/A N/A N/A 46.13 40.74 38.](/docs-images/95/123667307/images/6-1.jpg "11 39.48 33.69 31.51 F-PointNet [29] Pedestrian 87.81 77.25 74.46 58.09 50.22 47.20 51.21 44.89 40.23 AVOD-FPN [19] 67.32 58.42 57.44 58.75 51.05 47.54 50.80 42.81 40.88 Ours 73.28 63.07 56.71 60.")
![83 51.24 45.40 56.92 44.68 42.39 AVOD [19] 65.72 56.01 48.89 63.66 47.74 46.55 60.11 44.90 38.80 VoxelNet [35] N/A N/A N/A 66.70 54.76 50.55 61.22 48.36 44.37 F-PointNet [29] Cyclist 84.90 72.25 65.](/docs-images/95/123667307/images/6-2.jpg "14 75.38 61.96 54.68 71.96 56.77 50.39 AVOD-FPN [19] 68.65 59.32 55.82 68.09 57.48 50.77 64.00 52.18 46.61 Ours 82.90 65.28 57.63 77.10 58.92 51.01 71.40 53.46 48.34 Table 1.")
6 Method Class AP 2D (%) AP BEV (%) AP 3D (%) Easy Moderate Hard Easy Moderate Hard Easy Moderate Hard MV3D [4] N/A N/A N/A AVOD [19] VoxelNet [35] N/A N/A N/A Car F-PointNet [29] AVOD-FPN [19] Ours AVOD [19] VoxelNet [35] N/A N/A N/A F-PointNet [29] Pedestrian AVOD-FPN [19] Ours AVOD [19] VoxelNet [35] N/A N/A N/A F-PointNet [29] Cyclist AVOD-FPN [19] Ours Table 1. Performance on KITTI test set for both Car, Pedestrian and Cyclists. Training Parameters During training, we use ADAM [18] optimizer with an initial learning rate of for the first 90 epochs and then decay the learning rate by 0.1 in every 10 epochs. We train 120 epochs in total. Each batch consists of 8 point clouds evenly distributed on 4 GPU cards. For each input point cloud, we sample 64 proposals, with a ratio of 1:3 for positives and negatives. Our implementation is based on Tensorflow [2]. During training the car model, a proposal is considered positive if its PointsIoU with a certain ground-truth box is higher than 0.55 and negative if its PointsIoU is less than 0.55 with all ground-truth boxes. The positive and negative PointsIoU thresholds are 0.5 and 0.5 for the pedestrian and cyclist model. Data Augmentation Data augmentation is important to prevent overfitting. We have used four point cloud augmentation methods following [35]. First, all instance objects with their interior points are randomly transformed respectively. For each bounding box, we randomly rotate it by a uniform distribution θ 1 [ π/3, +π/3] and randomly add a translation ( x, y, z) to its XY Z value as well as its interior points. Second, each point cloud is flipped along the x-axis in camera coordinate with probability 0.5. Third, we randomly rotate each point cloud around y-axis (up orientation) by a uniformly distributed random variable θ 2 [ π/4, +π/4]. Finally, we apply a global scaling to point cloud with a random variable drawn from uniform distribution [0.9, 1.1]. During training, we randomly use one of these four augmentations for each point cloud. Post-process After predicting the bounding box for each proposal, we use a NMS layer with IoU threshold 0.01 to remove overlapped detection. The input scores to NMS are classification probabilities, and the predicted bounding boxes are projected to BEV before performing NMS. (a) (b) (c) Figure 7. Illustration of failure cases in Cyclist detection. In this case, we can only get points labeled as rider, which leads to the detection result tending to be Pedestrian rather than Cyclist Evaluation on KITTI Test Set For evaluation on the test set, we train our model on our own split train/val set at a ratio of 4:1. The performance of our method and its comparison with previous state-of-thearts is listed in Table 1. Compared to F-PointNet, our model greatly improves the detection accuracy on the hard set by 6.75%, 2.52%, and 4.14% on 2D, BEV and 3D respectively, which indicates that our model can overcome the limitation of 2D detector on cluttered objects. Compared to multi-view based methods [19, 4], ours performs better in Pedestrian prediction by a large margin of 6.12%, 1.87%, and 1.51% on the easy, moderate and hard levels separately. So our strategy is good at detecting dense objects, such as a crowd of people. Compared to VoxelNet[35], our model shows superior performance in all classes. We present several detection results in Figure 8, where many difficult cases are decently dealt with. We note that one current problem, due to the dataset limitation, is the absence of class cyclist in Cityscapes dataset. So it is hard to select foreground points of cyclists, leading to relatively weak performance on this class. Several imperfect semantic masks are shown in Figure 7.










![follow VoxelNet [35] to](/docs-images/95/123667307/images/7-10.jpg "split the official")




















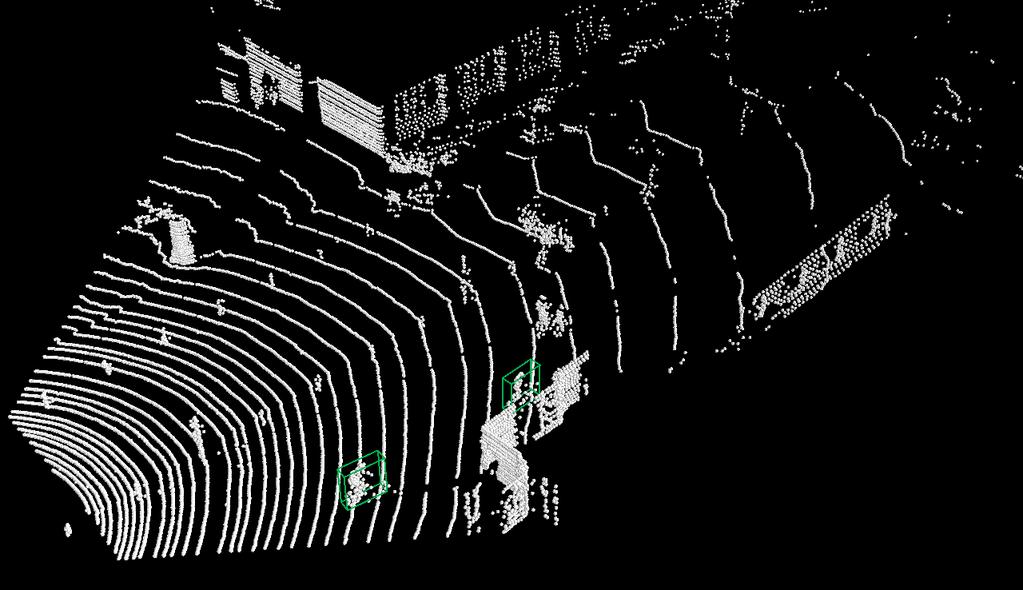


7 Figure 8. Visualizations of our results on KITTI test set. In each image, a box detected as car, pedestrian or cyclist is in yellow, red or green respectively. The top row in each image is 3D object detection results projected on to the RGB images. The middle is 2D semantic segmentation results of images. The bottom is 3D object detection results in the LIDAR phase Ablation Studies For ablation studies, we follow VoxelNet [35] to split the official training set into a train set of 3,717 images and a val set of 3,769 images. Images in train/val set belonging to different video clips. All ablation studies are conducted on the car class due to the relatively larger amount of data to make system run stably. Effect of Subsampling Network Subsampling network in our model is to eliminate complicated background points so as to reduce computation complexity. We conduct experiments on using 2D segmentation and 3D segmentation as point selection masks. Here, we choose 2D segmentation rather than 2D detection since segmentation results are with much higher quality and more useful on cluttered scenes. As listed in Table 2, 2D semantic segmentation is the best choice empirically for our model. However, if we use 3D semantic segmentation module instead, either sampling points or taking one part of point cloud as input each time by sliding window is needed, due to the GPU memory limitation. Our observation is that results with 3D segmentation are even with lower quality than those from 2D segmentation. We also compare with the baseline solution without masking foreground points, denoted as No Mask. Still, this baseline performs notably
8 Mask Easy Moderate Hard No Mask (Random Choice) No Mask (Sliding Window) D (Random Choice) D (Sliding Window) D Table 2. 3D object detection AP on KITTI val set. Random Choice means randomly sampling points inside a point cloud. Sliding Window stands for taking one part of point cloud as input each time and ensembling these detection results. No Mask means directly using all points in a point cloud as positive points. 3D means directly using 3D segmentation module as the subsampling method. 2D means using 2D image segmentation as the subsampling method. Points IoU Context Feature Easy Moderate Hard Table 3. 3D object detection AP on KITTI val set. A tick in the Points IoU item means we use Points IoU. Otherwise, we use original bounding box IoU for assigning positive and negative proposals as an alternative. A tick in the Context Feature item means we use the PointNet++ backbone to extract context feature for the whole point cloud. Benchmark Easy Moderate Hard Car (3D Detection) Car (BEV) Pedestrian (3D Detection) Pedestrian (BEV) Cyclist (3D Detection) Cyclist (BEV) Table 4. 3D object detection AP and BEV detection AP on KITTI val set of our model for cars, pedestrians and cyclists. worse than our full design, manifesting the importance of subsampling network. Effect of PointsIoU Sampling and Context Feature PointsIoU sampling is used in the training phase as the criterion to assign positive and negative proposals. As shown in Table 3, it significantly promotes our model s performance by 7.3% in hard cases, compared with trivially using bounding box IoU. It is helpful also in suppressing false positive proposals as well as false negative proposals. PointNet++ backbone can extract the context feature for the whole point cloud, which is beneficial to 3D detection. AP in Table 3 demonstrates its ability, which increases by around 15% on easy set, 20% on both moderate and hard sets. Effects of Proposal Feature As shown in Figure 5, our proposal feature is composed of high-level abstraction feature and canonized coordinates. We investigate the effect of using different components in the point pooling feature. As shown in Table 5, combination of high-level feature high-level normalized canonized accuracy Table 5. Effect of using different components of proposal feature. A tick in high-level item means using points feature with highlevel abstraction and context information from the backbone network. A tick in normalized item means we simply use the coordinates normalized by points center as the second part of proposal feature. Confirmation on the canonized item means the second part proposal feature is the canonized XY Z value instead of the normalized XY Z. Method Easy Moderate Hard VoxelNet [35] (3D) VoxelNet [35] (BEV) F-PointNet [29] (3D) F-PointNet [29] (BEV) AVOD [19] (3D) AVOD [19] (BEV) Ours (3D) Ours (BEV) Table 6. 3D and BEV detection AP on KITTI val set of our model for Car compared to other state-of-the-art methods. and canonized coordinates enhance the model s capability greatly and is thus adopted in our final structure. Result on Validation Our results on KITTI validation set including Car, Pedestrian and Cyclist are shown in Table 4, with all components included. Our results on validation set compared to other state-of-the-art methods are listed in Table 6. Compared to F-PointNet, our model performs notably better on small objects with only a few points, which brings great benefit to detection on hard set. Moreover, compared to multi-view-based methods like [19], our method also yields intriguing 3D object detection performance. It is because our model is more sensitive to structure and appearance details. 5. Concluding Remarks We have proposed a new method operating on raw points. We seed each point with proposals, without loss of precious localization information from point cloud data. Then prediction for each proposal is made on the proposal feature with context information captured by large receptive field and point coordinates that keep accurate shape information. Our experiments have shown that our model outperforms state-of-the-art 3D detection methods in hard set by a large margin, especially for those high occlusion or crowded scenes.
9 References [1] kitti 3d object detection benchmark. http: // object.php?obj_benchmark=3d, [2] M. Abadi, A. Agarwal, P. Barham, E. Brevdo, Z. Chen, C. Citro, G. S. Corrado, A. Davis, J. Dean, M. Devin, S. Ghemawat, I. J. Goodfellow, A. Harp, G. Irving, M. Isard, Y. Jia, R. Józefowicz, L. Kaiser, M. Kudlur, J. Levenberg, D. Mané, R. Monga, S. Moore, D. G. Murray, C. Olah, M. Schuster, J. Shlens, B. Steiner, I. Sutskever, K. Talwar, P. A. Tucker, V. Vanhoucke, V. Vasudevan, F. B. Viégas, O. Vinyals, P. Warden, M. Wattenberg, M. Wicke, Y. Yu, and X. Zheng. Tensorflow: Large-scale machine learning on heterogeneous distributed systems. CoRR, [3] L. Chen, G. Papandreou, I. Kokkinos, K. Murphy, and A. L. Yuille. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell., [4] X. Chen, H. Ma, J. Wan, B. Li, and T. Xia. Multi-view 3d object detection network for autonomous driving. In CVPR, [5] F. Chollet. Xception: Deep learning with depthwise separable convolutions. In CVPR, [6] M. Cordts, M. Omran, S. Ramos, T. Rehfeld, M. Enzweiler, R. Benenson, U. Franke, S. Roth, and B. Schiele. The cityscapes dataset for semantic urban scene understanding. In CVPR, [7] A. Dai, A. X. Chang, M. Savva, M. Halber, T. A. Funkhouser, and M. Nießner. Scannet: Richly-annotated 3d reconstructions of indoor scenes. In CVPR, [8] A. Dai and M. Nießner. 3dmv: Joint 3d-multi-view prediction for 3d semantic scene segmentation. In ECCV, [9] J. Dai, H. Qi, Y. Xiong, Y. Li, G. Zhang, H. Hu, and Y. Wei. Deformable convolutional networks. CoRR, [10] M. Engelcke, D. Rao, D. Z. Wang, C. H. Tong, and I. Posner. Vote3deep: Fast object detection in 3d point clouds using efficient convolutional neural networks. In ICRA, [11] C. Fu, W. Liu, A. Ranga, A. Tyagi, and A. C. Berg. DSSD : Deconvolutional single shot detector. CoRR, [12] A. Geiger, P. Lenz, C. Stiller, and R. Urtasun. Vision meets robotics: The KITTI dataset. I. J. Robotics Res., [13] A. Geiger, P. Lenz, and R. Urtasun. Are we ready for autonomous driving? the KITTI vision benchmark suite. In CVPR, [14] R. B. Girshick, J. Donahue, T. Darrell, and J. Malik. Rich feature hierarchies for accurate object detection and semantic segmentation. In CVPR, [15] A. González, G. Villalonga, J. Xu, D. Vázquez, J. Amores, and A. M. López. Multiview random forest of local experts combining RGB and LIDAR data for pedestrian detection. In IV, [16] M. Jaderberg, K. Simonyan, A. Zisserman, and K. Kavukcuoglu. Spatial transformer networks. In NIPS, [17] M. Jiang, Y. Wu, and C. Lu. Pointsift: A sift-like network module for 3d point cloud semantic segmentation. CoRR, [18] D. P. Kingma and J. Ba. Adam: A method for stochastic optimization. CoRR, [19] J. Ku, M. Mozifian, J. Lee, A. Harakeh, and S. L. Waslander. Joint 3d proposal generation and object detection from view aggregation. CoRR, [20] B. Li. 3d fully convolutional network for vehicle detection in point cloud. In IROS, [21] J. Li, B. M. Chen, and G. H. Lee. So-net: Self-organizing network for point cloud analysis. CoRR, [22] Y. Li, R. Bu, M. Sun, and B. Chen. Pointcnn. CoRR, [23] T. Lin, P. Dollár, R. B. Girshick, K. He, B. Hariharan, and S. J. Belongie. Feature pyramid networks for object detection. In CVPR, [24] T. Lin, P. Goyal, R. B. Girshick, K. He, and P. Dollár. Focal loss for dense object detection. In ICCV, [25] W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. E. Reed, C. Fu, and A. C. Berg. SSD: single shot multibox detector. In ECCV, [26] D. Maturana and S. Scherer. Voxnet: A 3d convolutional neural network for real-time object recognition. In IROS, [27] Y. Park, V. Lepetit, and W. Woo. Multiple 3d object tracking for augmented reality. In ISMAR, [28] C. Premebida, J. Carreira, J. Batista, and U. Nunes. Pedestrian detection combining RGB and dense LIDAR data. In ICoR, [29] C. R. Qi, W. Liu, C. Wu, H. Su, and L. J. Guibas. Frustum pointnets for 3d object detection from RGB-D data. CoRR, [30] C. R. Qi, H. Su, K. Mo, and L. J. Guibas. Pointnet: Deep learning on point sets for 3d classification and segmentation. In CVPR, [31] C. R. Qi, L. Yi, H. Su, and L. J. Guibas. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. In NIPS, [32] D. Z. Wang and I. Posner. Voting for voting in online point cloud object detection. In Robotics: Science and Systems XI, [33] B. Wu, A. Wan, X. Yue, and K. Keutzer. Squeezeseg: Convolutional neural nets with recurrent CRF for real-time roadobject segmentation from 3d lidar point cloud. In ICRA, [34] H. Zhao, J. Shi, X. Qi, X. Wang, and J. Jia. Pyramid scene parsing network. In CVPR, [35] Y. Zhou and O. Tuzel. Voxelnet: End-to-end learning for point cloud based 3d object detection. CoRR, 2017.
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
arxiv: v4 [cs.cv] 12 Jul 2018
![arxiv: v4 [cs.cv] 12 Jul 2018](/thumbs/82/85481048.jpg "arxiv: v4 [cs.cv] 12 Jul 2018") Joint 3D Proposal Generation and Object Detection from View Aggregation Jason Ku, Melissa Mozifian, Jungwook Lee, Ali Harakeh, and Steven L. Waslander arxiv:1712.02294v4 [cs.cv] 12 Jul 2018 Abstract We
Joint 3D Proposal Generation and Object Detection from View Aggregation Jason Ku, Melissa Mozifian, Jungwook Lee, Ali Harakeh, and Steven L. Waslander arxiv:1712.02294v4 [cs.cv] 12 Jul 2018 Abstract We
Cross-domain Deep Encoding for 3D Voxels and 2D Images
 Cross-domain Deep Encoding for 3D Voxels and 2D Images Jingwei Ji Stanford University jingweij@stanford.edu Danyang Wang Stanford University danyangw@stanford.edu 1. Introduction 3D reconstruction is one
Cross-domain Deep Encoding for 3D Voxels and 2D Images Jingwei Ji Stanford University jingweij@stanford.edu Danyang Wang Stanford University danyangw@stanford.edu 1. Introduction 3D reconstruction is one
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
arxiv: v1 [cs.cv] 9 Nov 2018
![arxiv: v1 [cs.cv] 9 Nov 2018](/thumbs/95/124568276.jpg "arxiv: v1 [cs.cv] 9 Nov 2018") RoarNet: A Robust 3D Object Detection based on RegiOn Approximation Refinement Kiwoo Shin, Youngwook Paul Kwon and Masayoshi Tomizuka arxiv:1811.3818v1 [cs.cv] 9 Nov 218 Abstract We present RoarNet, a
RoarNet: A Robust 3D Object Detection based on RegiOn Approximation Refinement Kiwoo Shin, Youngwook Paul Kwon and Masayoshi Tomizuka arxiv:1811.3818v1 [cs.cv] 9 Nov 218 Abstract We present RoarNet, a
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
Tracking by recognition using neural network
 Zhiliang Zeng, Ying Kin Yu, and Kin Hong Wong,"Tracking by recognition using neural network",19th IEEE/ACIS International Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed
Zhiliang Zeng, Ying Kin Yu, and Kin Hong Wong,"Tracking by recognition using neural network",19th IEEE/ACIS International Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
From 3D descriptors to monocular 6D pose: what have we learned?
 ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
arxiv: v1 [cs.cv] 15 Oct 2018
![arxiv: v1 [cs.cv] 15 Oct 2018](/thumbs/89/99052786.jpg "arxiv: v1 [cs.cv] 15 Oct 2018") Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Scene classification with Convolutional Neural Networks
 Scene classification with Convolutional Neural Networks Josh King jking9@stanford.edu Vayu Kishore vayu@stanford.edu Filippo Ranalli franalli@stanford.edu Abstract This paper approaches the problem of
Scene classification with Convolutional Neural Networks Josh King jking9@stanford.edu Vayu Kishore vayu@stanford.edu Filippo Ranalli franalli@stanford.edu Abstract This paper approaches the problem of
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
arxiv: v1 [cs.cv] 2 Apr 2019
![arxiv: v1 [cs.cv] 2 Apr 2019](/thumbs/96/126786337.jpg "arxiv: v1 [cs.cv] 2 Apr 2019") MVX-Net: Multimodal VoxelNet for 3D Object Detection Vishwanath A. Sindagi 1, Yin Zhou 2 and Oncel Tuzel 2 arxiv:1904.01649v1 [cs.cv] 2 Apr 2019 Abstract Many recent works on 3D object detection have focused
MVX-Net: Multimodal VoxelNet for 3D Object Detection Vishwanath A. Sindagi 1, Yin Zhou 2 and Oncel Tuzel 2 arxiv:1904.01649v1 [cs.cv] 2 Apr 2019 Abstract Many recent works on 3D object detection have focused
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Deep Continuous Fusion for Multi-Sensor 3D Object Detection
 Deep Continuous Fusion for Multi-Sensor 3D Object Detection Ming Liang 1, Bin Yang 1,2, Shenlong Wang 1,2, and Raquel Urtasun 1,2 1 Uber Advanced Technologies Group 2 University of Toronto {ming.liang,
Deep Continuous Fusion for Multi-Sensor 3D Object Detection Ming Liang 1, Bin Yang 1,2, Shenlong Wang 1,2, and Raquel Urtasun 1,2 1 Uber Advanced Technologies Group 2 University of Toronto {ming.liang,
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Instance-aware Semantic Segmentation via Multi-task Network Cascades
 Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai, Kaiming He, Jian Sun Microsoft research 2016 Yotam Gil Amit Nativ Agenda Introduction Highlights Implementation Further
Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai, Kaiming He, Jian Sun Microsoft research 2016 Yotam Gil Amit Nativ Agenda Introduction Highlights Implementation Further
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
3 Object Detection. BVM 2018 Tutorial: Advanced Deep Learning Methods. Paul F. Jaeger, Division of Medical Image Computing
 3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
arxiv: v1 [cs.cv] 16 Mar 2018
![arxiv: v1 [cs.cv] 16 Mar 2018](/thumbs/77/75734034.jpg "arxiv: v1 [cs.cv] 16 Mar 2018") arxiv:1803.06199v1 [cs.cv] 16 Mar 2018 Complex-YOLO: An Euler-Region-Proposal for Real-time 3D Object Detection on Point Clouds Martin Simon *, Stefan Milz, Karl Amende *, Horst-Michael Gross * Valeo Schalter
arxiv:1803.06199v1 [cs.cv] 16 Mar 2018 Complex-YOLO: An Euler-Region-Proposal for Real-time 3D Object Detection on Point Clouds Martin Simon *, Stefan Milz, Karl Amende *, Horst-Michael Gross * Valeo Schalter
An Accurate and Real-time Self-blast Glass Insulator Location Method Based On Faster R-CNN and U-net with Aerial Images
 1 An Accurate and Real-time Self-blast Glass Insulator Location Method Based On Faster R-CNN and U-net with Aerial Images Zenan Ling 2, Robert C. Qiu 1,2, Fellow, IEEE, Zhijian Jin 2, Member, IEEE Yuhang
1 An Accurate and Real-time Self-blast Glass Insulator Location Method Based On Faster R-CNN and U-net with Aerial Images Zenan Ling 2, Robert C. Qiu 1,2, Fellow, IEEE, Zhijian Jin 2, Member, IEEE Yuhang
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
3D Deep Convolution Neural Network Application in Lung Nodule Detection on CT Images
 3D Deep Convolution Neural Network Application in Lung Nodule Detection on CT Images Fonova zl953@nyu.edu Abstract Pulmonary cancer is the leading cause of cancer-related death worldwide, and early stage
3D Deep Convolution Neural Network Application in Lung Nodule Detection on CT Images Fonova zl953@nyu.edu Abstract Pulmonary cancer is the leading cause of cancer-related death worldwide, and early stage
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
 PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
Joint Object Detection and Viewpoint Estimation using CNN features
 Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
HDNET: Exploiting HD Maps for 3D Object Detection
 HDNET: Exploiting HD Maps for 3D Object Detection Bin Yang 1,2 Ming Liang 1 Raquel Urtasun 1,2 1 Uber Advanced Technologies Group 2 University of Toronto {byang10, ming.liang, urtasun}@uber.com Abstract:
HDNET: Exploiting HD Maps for 3D Object Detection Bin Yang 1,2 Ming Liang 1 Raquel Urtasun 1,2 1 Uber Advanced Technologies Group 2 University of Toronto {byang10, ming.liang, urtasun}@uber.com Abstract:
R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
Amodal and Panoptic Segmentation. Stephanie Liu, Andrew Zhou
 Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
RSRN: Rich Side-output Residual Network for Medial Axis Detection
 RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Feature-Fused SSD: Fast Detection for Small Objects
 Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
arxiv: v1 [cs.cv] 17 Nov 2017
![arxiv: v1 [cs.cv] 17 Nov 2017](/thumbs/72/66402414.jpg "arxiv: v1 [cs.cv] 17 Nov 2017") VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection Yin Zhou Apple Inc yzhou3@apple.com Oncel Tuzel Apple Inc otuzel@apple.com arxiv:1711.06396v1 [cs.cv] 17 Nov 2017 Abstract Accurate
VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection Yin Zhou Apple Inc yzhou3@apple.com Oncel Tuzel Apple Inc otuzel@apple.com arxiv:1711.06396v1 [cs.cv] 17 Nov 2017 Abstract Accurate
Kaggle Data Science Bowl 2017 Technical Report
 Kaggle Data Science Bowl 2017 Technical Report qfpxfd Team May 11, 2017 1 Team Members Table 1: Team members Name E-Mail University Jia Ding dingjia@pku.edu.cn Peking University, Beijing, China Aoxue Li
Kaggle Data Science Bowl 2017 Technical Report qfpxfd Team May 11, 2017 1 Team Members Table 1: Team members Name E-Mail University Jia Ding dingjia@pku.edu.cn Peking University, Beijing, China Aoxue Li
POINT CLOUD DEEP LEARNING
 POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Object Detection on Self-Driving Cars in China. Lingyun Li
 Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network
 Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Photo OCR ( )
") Photo OCR (2017-2018) Xiang Bai Huazhong University of Science and Technology Outline VALSE2018, DaLian Xiang Bai 2 Deep Direct Regression for Multi-Oriented Scene Text Detection [He et al., ICCV, 2017.]
Photo OCR (2017-2018) Xiang Bai Huazhong University of Science and Technology Outline VALSE2018, DaLian Xiang Bai 2 Deep Direct Regression for Multi-Oriented Scene Text Detection [He et al., ICCV, 2017.]
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas
 PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
arxiv: v1 [cs.cv] 25 Aug 2018
![arxiv: v1 [cs.cv] 25 Aug 2018](/thumbs/93/112131672.jpg "arxiv: v1 [cs.cv] 25 Aug 2018") Painting Outside the Box: Image Outpainting with GANs Mark Sabini and Gili Rusak Stanford University {msabini, gilir}@cs.stanford.edu arxiv:1808.08483v1 [cs.cv] 25 Aug 2018 Abstract The challenging task
Painting Outside the Box: Image Outpainting with GANs Mark Sabini and Gili Rusak Stanford University {msabini, gilir}@cs.stanford.edu arxiv:1808.08483v1 [cs.cv] 25 Aug 2018 Abstract The challenging task
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Automotive 3D Object Detection Without Target Domain Annotations
 Master of Science Thesis in Electrical Engineering Department of Electrical Engineering, Linköping University, 2018 Automotive 3D Object Detection Without Target Domain Annotations Erik Linder-Norén and
Master of Science Thesis in Electrical Engineering Department of Electrical Engineering, Linköping University, 2018 Automotive 3D Object Detection Without Target Domain Annotations Erik Linder-Norén and
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Mask R-CNN. By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi
 Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
arxiv: v1 [cs.ro] 24 Jul 2018
![arxiv: v1 [cs.ro] 24 Jul 2018](/thumbs/82/86968787.jpg "arxiv: v1 [cs.ro] 24 Jul 2018") ClusterNet: Instance Segmentation in RGB-D Images Lin Shao, Ye Tian, Jeannette Bohg Stanford University United States lins2,yetian1,bohg@stanford.edu arxiv:1807.08894v1 [cs.ro] 24 Jul 2018 Abstract: We
ClusterNet: Instance Segmentation in RGB-D Images Lin Shao, Ye Tian, Jeannette Bohg Stanford University United States lins2,yetian1,bohg@stanford.edu arxiv:1807.08894v1 [cs.ro] 24 Jul 2018 Abstract: We
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Evaluating Mask R-CNN Performance for Indoor Scene Understanding
 Evaluating Mask R-CNN Performance for Indoor Scene Understanding Badruswamy, Shiva shivalgo@stanford.edu June 12, 2018 1 Motivation and Problem Statement Indoor robotics and Augmented Reality are fast
Evaluating Mask R-CNN Performance for Indoor Scene Understanding Badruswamy, Shiva shivalgo@stanford.edu June 12, 2018 1 Motivation and Problem Statement Indoor robotics and Augmented Reality are fast
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet.
 Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
arxiv: v1 [cs.cv] 27 Mar 2019
![arxiv: v1 [cs.cv] 27 Mar 2019](/thumbs/96/129261901.jpg "arxiv: v1 [cs.cv] 27 Mar 2019") Learning 2D to 3D Lifting for Object Detection in 3D for Autonomous Vehicles Siddharth Srivastava 1, Frederic Jurie 2 and Gaurav Sharma 3 arxiv:1904.08494v1 [cs.cv] 27 Mar 2019 Abstract We address the
Learning 2D to 3D Lifting for Object Detection in 3D for Autonomous Vehicles Siddharth Srivastava 1, Frederic Jurie 2 and Gaurav Sharma 3 arxiv:1904.08494v1 [cs.cv] 27 Mar 2019 Abstract We address the
Pedestrian Detection based on Deep Fusion Network using Feature Correlation
 Pedestrian Detection based on Deep Fusion Network using Feature Correlation Yongwoo Lee, Toan Duc Bui and Jitae Shin School of Electronic and Electrical Engineering, Sungkyunkwan University, Suwon, South
Pedestrian Detection based on Deep Fusion Network using Feature Correlation Yongwoo Lee, Toan Duc Bui and Jitae Shin School of Electronic and Electrical Engineering, Sungkyunkwan University, Suwon, South
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Cascade Region Regression for Robust Object Detection
 Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Cascade Region Regression for Robust Object Detection Jiankang Deng, Shaoli Huang, Jing Yang, Hui Shuai, Zhengbo Yu, Zongguang Lu, Qiang Ma, Yali
Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Cascade Region Regression for Robust Object Detection Jiankang Deng, Shaoli Huang, Jing Yang, Hui Shuai, Zhengbo Yu, Zongguang Lu, Qiang Ma, Yali
arxiv: v1 [cs.cv] 17 Apr 2019
![arxiv: v1 [cs.cv] 17 Apr 2019](/thumbs/96/128787164.jpg "arxiv: v1 [cs.cv] 17 Apr 2019") 2D Car Detection in Radar Data with PointNets Andreas Danzer, Thomas Griebel, Martin Bach, and Klaus Dietmayer arxiv:1904.08414v1 [cs.cv] 17 Apr 2019 Abstract For many automated driving functions, a highly
2D Car Detection in Radar Data with PointNets Andreas Danzer, Thomas Griebel, Martin Bach, and Klaus Dietmayer arxiv:1904.08414v1 [cs.cv] 17 Apr 2019 Abstract For many automated driving functions, a highly
Pixel Offset Regression (POR) for Single-shot Instance Segmentation
 for Single-shot Instance Segmentation") Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm
 CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
Modern Convolutional Object Detectors
 Modern Convolutional Object Detectors Faster R-CNN, R-FCN, SSD 29 September 2017 Presented by: Kevin Liang Papers Presented Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
Modern Convolutional Object Detectors Faster R-CNN, R-FCN, SSD 29 September 2017 Presented by: Kevin Liang Papers Presented Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
arxiv: v1 [cs.cv] 19 Mar 2018
![arxiv: v1 [cs.cv] 19 Mar 2018](/thumbs/78/77646221.jpg "arxiv: v1 [cs.cv] 19 Mar 2018") arxiv:1803.07066v1 [cs.cv] 19 Mar 2018 Learning Region Features for Object Detection Jiayuan Gu 1, Han Hu 2, Liwei Wang 1, Yichen Wei 2 and Jifeng Dai 2 1 Key Laboratory of Machine Perception, School of
arxiv:1803.07066v1 [cs.cv] 19 Mar 2018 Learning Region Features for Object Detection Jiayuan Gu 1, Han Hu 2, Liwei Wang 1, Yichen Wei 2 and Jifeng Dai 2 1 Key Laboratory of Machine Perception, School of
Supplementary Material: Unconstrained Salient Object Detection via Proposal Subset Optimization
 Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Traffic Multiple Target Detection on YOLOv2
 Traffic Multiple Target Detection on YOLOv2 Junhong Li, Huibin Ge, Ziyang Zhang, Weiqin Wang, Yi Yang Taiyuan University of Technology, Shanxi, 030600, China wangweiqin1609@link.tyut.edu.cn Abstract Background
Traffic Multiple Target Detection on YOLOv2 Junhong Li, Huibin Ge, Ziyang Zhang, Weiqin Wang, Yi Yang Taiyuan University of Technology, Shanxi, 030600, China wangweiqin1609@link.tyut.edu.cn Abstract Background
arxiv: v2 [cs.cv] 10 Oct 2018
![arxiv: v2 [cs.cv] 10 Oct 2018](/thumbs/92/109817158.jpg "arxiv: v2 [cs.cv] 10 Oct 2018") Net: An Accurate and Efficient Single-Shot Object Detector for Autonomous Driving Qijie Zhao 1, Tao Sheng 1, Yongtao Wang 1, Feng Ni 1, Ling Cai 2 1 Institute of Computer Science and Technology, Peking
Net: An Accurate and Efficient Single-Shot Object Detector for Autonomous Driving Qijie Zhao 1, Tao Sheng 1, Yongtao Wang 1, Feng Ni 1, Ling Cai 2 1 Institute of Computer Science and Technology, Peking
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
arxiv: v1 [cs.cv] 26 Jul 2018
![arxiv: v1 [cs.cv] 26 Jul 2018](/thumbs/88/117269915.jpg "arxiv: v1 [cs.cv] 26 Jul 2018") A Better Baseline for AVA Rohit Girdhar João Carreira Carl Doersch Andrew Zisserman DeepMind Carnegie Mellon University University of Oxford arxiv:1807.10066v1 [cs.cv] 26 Jul 2018 Abstract We introduce
A Better Baseline for AVA Rohit Girdhar João Carreira Carl Doersch Andrew Zisserman DeepMind Carnegie Mellon University University of Oxford arxiv:1807.10066v1 [cs.cv] 26 Jul 2018 Abstract We introduce
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Object Detection and Classification in Occupancy Grid Maps using Deep Convolutional Networks
 arxiv:1805.08689v2 [cs.cv] 5 Dec 2018 Object Detection and Classification in Occupancy Grid Maps using Deep Convolutional Networks Sascha Wirges, Tom Fischer and Christoph Stiller Jesus Balado Frias Mobile
arxiv:1805.08689v2 [cs.cv] 5 Dec 2018 Object Detection and Classification in Occupancy Grid Maps using Deep Convolutional Networks Sascha Wirges, Tom Fischer and Christoph Stiller Jesus Balado Frias Mobile
Semantic Segmentation
 Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
arxiv: v3 [cs.cv] 12 Mar 2018
![arxiv: v3 [cs.cv] 12 Mar 2018](/thumbs/86/94163176.jpg "arxiv: v3 [cs.cv] 12 Mar 2018") Improving Object Localization with Fitness NMS and Bounded IoU Loss Lachlan Tychsen-Smith, Lars Petersson CSIRO (Data6) CSIRO-Synergy Building, Acton, ACT, 26 Lachlan.Tychsen-Smith@data6.csiro.au, Lars.Petersson@data6.csiro.au
Improving Object Localization with Fitness NMS and Bounded IoU Loss Lachlan Tychsen-Smith, Lars Petersson CSIRO (Data6) CSIRO-Synergy Building, Acton, ACT, 26 Lachlan.Tychsen-Smith@data6.csiro.au, Lars.Petersson@data6.csiro.au
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen 1, Huimin Ma 1, Ji Wan 2, Bo Li 2, Tian Xia 2 1 Department of Electronic Engineering, Tsinghua University 2 Baidu Inc. {chenxz12@mails.,
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen 1, Huimin Ma 1, Ji Wan 2, Bo Li 2, Tian Xia 2 1 Department of Electronic Engineering, Tsinghua University 2 Baidu Inc. {chenxz12@mails.,
3D Deep Learning on Geometric Forms. Hao Su
 3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
A Study of Vehicle Detector Generalization on U.S. Highway
 26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
arxiv: v1 [cs.cv] 28 Nov 2018
![arxiv: v1 [cs.cv] 28 Nov 2018](/thumbs/91/104803963.jpg "arxiv: v1 [cs.cv] 28 Nov 2018") MeshNet: Mesh Neural Network for 3D Shape Representation Yutong Feng, 1 Yifan Feng, 2 Haoxuan You, 1 Xibin Zhao 1, Yue Gao 1 1 BNRist, KLISS, School of Software, Tsinghua University, China. 2 School of
MeshNet: Mesh Neural Network for 3D Shape Representation Yutong Feng, 1 Yifan Feng, 2 Haoxuan You, 1 Xibin Zhao 1, Yue Gao 1 1 BNRist, KLISS, School of Software, Tsinghua University, China. 2 School of
Multi-Level Fusion based 3D Object Detection from Monocular Images
 Multi-Level Fusion based 3D Object Detection from Monocular Images Bin Xu, Zhenzhong Chen School of Remote Sensing and Information Engineering, Wuhan University, China {ysfalo,zzchen}@whu.edu.cn Abstract
Multi-Level Fusion based 3D Object Detection from Monocular Images Bin Xu, Zhenzhong Chen School of Remote Sensing and Information Engineering, Wuhan University, China {ysfalo,zzchen}@whu.edu.cn Abstract
SGN: Sequential Grouping Networks for Instance Segmentation
 SGN: Sequential Grouping Networks for Instance Segmentation Shu Liu Jiaya Jia,[ Sanja Fidler Raquel Urtasun, The Chinese University of Hong Kong [ Youtu Lab, Tencent Uber Advanced Technologies Group University
SGN: Sequential Grouping Networks for Instance Segmentation Shu Liu Jiaya Jia,[ Sanja Fidler Raquel Urtasun, The Chinese University of Hong Kong [ Youtu Lab, Tencent Uber Advanced Technologies Group University
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details