Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet.
|
|
|
- Emil Clarke
- 5 years ago
- Views:
Transcription

1 Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA



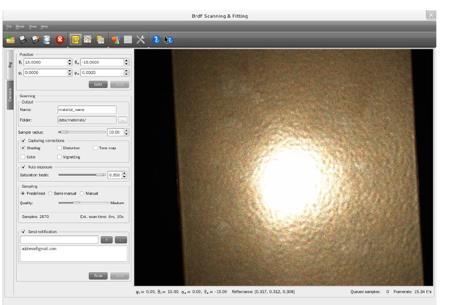













2 Photo-realistic image synthesis Light field imaging Multi-sensor imaging High dynamic range imaging f(i) Appearance capture and modelling Tone mapping and HDR video compression Medical visualization Glasses free 3D displays Sparse representations and compressive sensing for imaging Image synthesis for Machine learning HDR video compression


3 MACHINE LEARNING A Krizhevsky, I Sutskever, GE Hinton: Imagenet classification with deep convolutional neural networks. In Advances in neural information processing systems, 2012

4 THE DATA CHALLENGE M. Cordts, M. Omran, S. Ramos, T. Rehfeld, M. Enzweiler, R. Benenson, U. Franke, S. Roth, and B. Schiele, "The Cityscapes Dataset for Semantic Urban Scene Understanding," in Proc. of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016.
5 SYNTHETIC DATA Why synthetic data? There is often a lack of high quality data for training and testing Expensive Manual annotation is difficult and prone to errors Synthetic data enables pixel accurate annotations Simulation of unrealistic non-physical views of data Data augmentation
6 SYNTHETIC DATA What is needed? High quality models and sensor simulation accuracy is highly important Full control over dataset variation



7 SYNTHETIC DATA What is needed? High quality models and sensor simulation accuracy is highly important Full control over dataset variation (long tail distributions)
8 SYNTHETIC DATA What is needed? High quality models and sensor simulation accuracy is highly important Full control over dataset variation Automatic generation is a must (procedural methods) Efficient handling of large image volumes is a must (rendering and storage)







9 REALISTIC SYNTHETIC DATA AT SCALE Experiment scope Experiment design Class selection Highly parallelized cloud computation and image synthesis Automatic procedural world modeling Photorealistic image synthesis with accurate segmentation and labeling
10 REALISTIC SYNTHETIC DATA AT SCALE
11 REALISTIC SYNTHETIC DATA AT SCALE S I M U L A T I O N T R A I N I N G T E S T I N G & V A L I D A T I O N A N N O T A T I O N D E S I G N N E U R A L N E T W O R K A N A L Y S I S

12 IMAGE SYNTHESIS
13 IMAGE SYNTHESIS
14 PROCEDURAL SCENARIO GENERATION











15 PROCEDURAL SCENARIO GENERATION

16 Procedural generation
17 REALISTIC SYNTHETIC DATA AT SCALE

18 REALISTIC SYNTHETIC DATA AT SCALE 2D BOUNDING BOXES

19 REALISTIC SYNTHETIC DATA AT SCALE 3D BOUNDING BOXES

20 REALISTIC SYNTHETIC DATA AT SCALE INSTANCE VISIBILITY




21 LIDAR
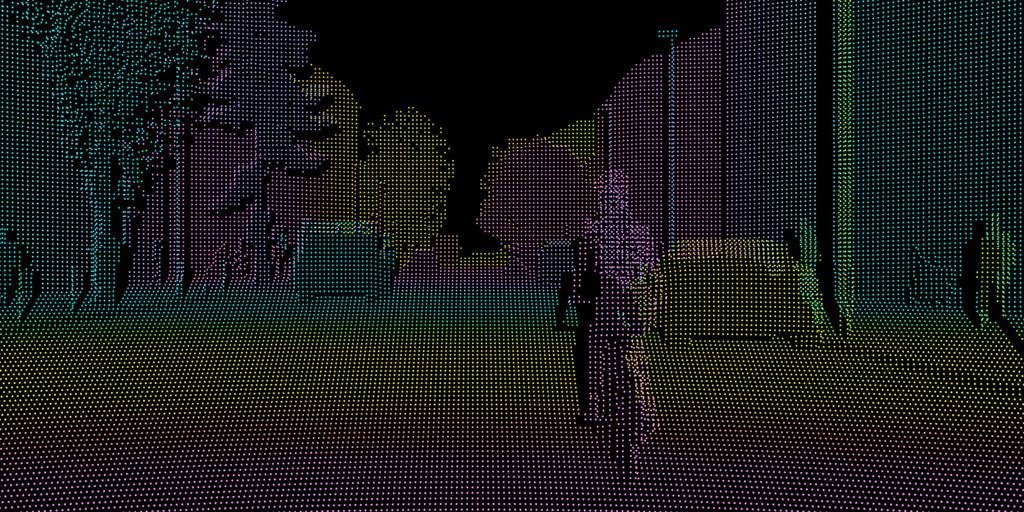
22 LIDAR
23 NON-PHYSICAL VIEWS
24

25
26 REALISTIC SYNTHETIC DATA AT SCALE CAN SYNTHETIC DATA REPRESENT THE REAL WORLD? THE TESTING PROBLEM Are my network s prediction on synthetic data reliable and actionable? THE TRAINING PROBLEM Can I train and/or augment a neural network using synthetic data? MAGNUS WRENNINGE AND JONAS UNGER, SYNSCAPES: A PHOTOREALISTIC SYNTHETIC DATASET FOR STREET SCENE PARSING, IN ARXIV E-PRINTS: , OCTOBER, 2018
27 Synthia GTA Our Data Road Building Fence Tr. light Veg. Sky Rider Truck Train Bicycle DEEPLAB_V3+ TRAINED ON CITYSCAPES INFERENCE ON SYNTHETIC DATA
: The SYNTHIA Dataset: A Large Collection of Synthetic Images")
")
28 Ros et al. (2016): The SYNTHIA Dataset: A Large Collection of Synthetic Images for Semantic Segmentation of Urban Scenes. In IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 7D Labs REALISTIC SYNTHETIC DATA AT SCALE CITYSCAPES-TRAINED PREDICTING ON SYNTHIA

, pp.")
29 REALISTIC SYNTHETIC DATA AT SCALE CITYSCAPES-TRAINED PREDICTING ON GTA Richter, S. R. G., Vineet, V., Koltun, V. (2016): Playing for Data: Ground Truth from Computer Games. In Proceedings of European Conference on Computer Vision (ECCV), pp , Springer International Publishing


30 REALISTIC SYNTHETIC DATA AT SCALE CITYSCAPES-TRAINED PREDICTING ON OUR DATA
31 REALISTIC SYNTHETIC DATA AT SCALE USING SYNTHETIC DATA FOR ANALYSIS

32 DETECTION: FASTER R-CNN (TENSORFLOW)

33 DETECTION: FASTER R-CNN (TENSORFLOW)
34
35 SUMMARY - SYNTHETIC DATA I M A G E S L I D A R M E T A D A T A Custom camera models PSF modeling LDR & HDR images Class & instance segmentation Depth Custom lidar models Depth Surface reflectivity Class & instance segmentation Ego vehicle motion Sensor extrinsics & intrinsics 2D bounding boxes Oriented 3D bounding boxes Per-object occlusion & truncation

36 SUMMARY - SYNTHETIC DATA REA LISTIC SYN THETIC DATA AT SCA LE EVALUATION/APPLICATIONS TRAINING TESTING ANALYSIS FUTURE WORK SYN SCA PES CHARACTERIZE DOMAIN SHIFT A BEN CHM A RK SYN THETIC DATA SET ANALYZE DATA Realistic image synthesis CONTINUOUSLY process UPDATE TRAINING SET Rich annotations TRAINING and metadata STRATEGIES State-of-the-art results Contact us for access! synscapes@7dlabs.com

37 Thank you! 7D Labs
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
Supplementary Material for Sparsity Invariant CNNs
 Supplementary Material for Sparsity Invariant CNNs Jonas Uhrig,1,2 Nick Schneider,1,3 Lukas Schneider 1,4 Uwe Franke 1 Thomas Brox 2 Andreas Geiger 4,5 1 Daimler R&D Sindelfingen 2 University of Freiburg
Supplementary Material for Sparsity Invariant CNNs Jonas Uhrig,1,2 Nick Schneider,1,3 Lukas Schneider 1,4 Uwe Franke 1 Thomas Brox 2 Andreas Geiger 4,5 1 Daimler R&D Sindelfingen 2 University of Freiburg
arxiv: v1 [cs.cv] 16 Mar 2018
![arxiv: v1 [cs.cv] 16 Mar 2018](/thumbs/92/109632247.jpg "arxiv: v1 [cs.cv] 16 Mar 2018") The ApolloScape Dataset for Autonomous Driving Xinyu Huang, Xinjing Cheng, Qichuan Geng, Binbin Cao, Dingfu Zhou, Peng Wang, Yuanqing Lin, and Ruigang Yang arxiv:1803.06184v1 [cs.cv] 16 Mar 2018 Baidu
The ApolloScape Dataset for Autonomous Driving Xinyu Huang, Xinjing Cheng, Qichuan Geng, Binbin Cao, Dingfu Zhou, Peng Wang, Yuanqing Lin, and Ruigang Yang arxiv:1803.06184v1 [cs.cv] 16 Mar 2018 Baidu
VisDA: A Synthetic-to-Real Benchmark for Visual Domain Adaptation
 VisDA: A Synthetic-to-Real Benchmark for Visual Domain Adaptation Xingchao Peng 1, Ben Usman 1, Neela Kaushik 1, Dequan Wang 2, Judy Hoffman 2, and Kate Saenko 1 xpeng,usmn,nkaushik,saenko@bu.edu, jhoffman,dqwang@eecs.berkeley.edu
VisDA: A Synthetic-to-Real Benchmark for Visual Domain Adaptation Xingchao Peng 1, Ben Usman 1, Neela Kaushik 1, Dequan Wang 2, Judy Hoffman 2, and Kate Saenko 1 xpeng,usmn,nkaushik,saenko@bu.edu, jhoffman,dqwang@eecs.berkeley.edu
Amodal and Panoptic Segmentation. Stephanie Liu, Andrew Zhou
 Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
arxiv: v1 [cs.cv] 15 Oct 2018
![arxiv: v1 [cs.cv] 15 Oct 2018](/thumbs/89/99052786.jpg "arxiv: v1 [cs.cv] 15 Oct 2018") Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
arxiv: v1 [cs.cv] 6 Oct 2016
![arxiv: v1 [cs.cv] 6 Oct 2016](/thumbs/88/117507646.jpg "arxiv: v1 [cs.cv] 6 Oct 2016") Driving in the Matrix: Can Virtual Worlds Replace Human-Generated Annotations for Real World Tasks? Matthew Johnson-Roberson 1, Charles Barto 2, Rounak Mehta 3, Sharath Nittur Sridhar 2, and Ram Vasudevan
Driving in the Matrix: Can Virtual Worlds Replace Human-Generated Annotations for Real World Tasks? Matthew Johnson-Roberson 1, Charles Barto 2, Rounak Mehta 3, Sharath Nittur Sridhar 2, and Ram Vasudevan
Procedural Modeling and Physically Based Rendering for Synthetic Data Generation in Automotive Applications
 Procedural Modeling and Physically Based Rendering for Synthetic Data Generation in Automotive Applications Apostolia Tsirikoglou1, Joel Kronander1 1 Magnus Wrenninge2, Jonas Unger1, Link oping University,
Procedural Modeling and Physically Based Rendering for Synthetic Data Generation in Automotive Applications Apostolia Tsirikoglou1, Joel Kronander1 1 Magnus Wrenninge2, Jonas Unger1, Link oping University,
arxiv: v2 [cs.cv] 1 Apr 2018
![arxiv: v2 [cs.cv] 1 Apr 2018](/thumbs/94/118088355.jpg "arxiv: v2 [cs.cv] 1 Apr 2018") Proposed Approach Extreme Domain Shift Learning from Synthetic Data: Addressing Domain Shift for Semantic Segmentation Swami Sankaranarayanan 1 Yogesh Balaji 1 Arpit Jain 2 Ser Nam Lim 2,3 Rama Chellappa
Proposed Approach Extreme Domain Shift Learning from Synthetic Data: Addressing Domain Shift for Semantic Segmentation Swami Sankaranarayanan 1 Yogesh Balaji 1 Arpit Jain 2 Ser Nam Lim 2,3 Rama Chellappa
arxiv: v1 [cs.cv] 4 Aug 2017
![arxiv: v1 [cs.cv] 4 Aug 2017](/thumbs/86/94276091.jpg "arxiv: v1 [cs.cv] 4 Aug 2017") Augmented Reality Meets Computer Vision : Efficient Data Generation for Urban Driving Scenes Hassan Abu Alhaija 1 Siva Karthik Mustikovela 1 Lars Mescheder 2 Andreas Geiger 2,3 Carsten Rother 1 arxiv:1708.01566v1
Augmented Reality Meets Computer Vision : Efficient Data Generation for Urban Driving Scenes Hassan Abu Alhaija 1 Siva Karthik Mustikovela 1 Lars Mescheder 2 Andreas Geiger 2,3 Carsten Rother 1 arxiv:1708.01566v1
arxiv: v2 [cs.cv] 12 Jul 2018
![arxiv: v2 [cs.cv] 12 Jul 2018](/thumbs/82/86180382.jpg "arxiv: v2 [cs.cv] 12 Jul 2018") The ApolloScape Dataset for Autonomous Driving Xinyu Huang, Xinjing Cheng, Qichuan Geng, Binbin Cao, Dingfu Zhou, Peng Wang, Yuanqing Lin, and Ruigang Yang arxiv:1803.06184v2 [cs.cv] 12 Jul 2018 Baidu
The ApolloScape Dataset for Autonomous Driving Xinyu Huang, Xinjing Cheng, Qichuan Geng, Binbin Cao, Dingfu Zhou, Peng Wang, Yuanqing Lin, and Ruigang Yang arxiv:1803.06184v2 [cs.cv] 12 Jul 2018 Baidu
Project report - COS 598B Physical adversarial examples for semantic image segmentation
 Project report - COS 598B Physical adversarial examples for semantic image segmentation Vikash Sehwag Princeton University vvikash@princeton.edu Abstract In this project, we work on the generation of physical
Project report - COS 598B Physical adversarial examples for semantic image segmentation Vikash Sehwag Princeton University vvikash@princeton.edu Abstract In this project, we work on the generation of physical
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
Photo-realistic Renderings for Machines Seong-heum Kim
 Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Visual Perception for Autonomous Driving on the NVIDIA DrivePX2 and using SYNTHIA
 Visual Perception for Autonomous Driving on the NVIDIA DrivePX2 and using SYNTHIA Dr. Juan C. Moure Dr. Antonio Espinosa http://grupsderecerca.uab.cat/hpca4se/en/content/gpu http://adas.cvc.uab.es/elektra/
Visual Perception for Autonomous Driving on the NVIDIA DrivePX2 and using SYNTHIA Dr. Juan C. Moure Dr. Antonio Espinosa http://grupsderecerca.uab.cat/hpca4se/en/content/gpu http://adas.cvc.uab.es/elektra/
Speeding up Semantic Segmentation for Autonomous Driving
 Speeding up Semantic Segmentation for Autonomous Driving Michael Treml 1, José Arjona-Medina 1, Thomas Unterthiner 1, Rupesh Durgesh 2, Felix Friedmann 2, Peter Schuberth 2, Andreas Mayr 1, Martin Heusel
Speeding up Semantic Segmentation for Autonomous Driving Michael Treml 1, José Arjona-Medina 1, Thomas Unterthiner 1, Rupesh Durgesh 2, Felix Friedmann 2, Peter Schuberth 2, Andreas Mayr 1, Martin Heusel
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
arxiv: v1 [cs.ro] 24 Jul 2018
![arxiv: v1 [cs.ro] 24 Jul 2018](/thumbs/82/86968787.jpg "arxiv: v1 [cs.ro] 24 Jul 2018") ClusterNet: Instance Segmentation in RGB-D Images Lin Shao, Ye Tian, Jeannette Bohg Stanford University United States lins2,yetian1,bohg@stanford.edu arxiv:1807.08894v1 [cs.ro] 24 Jul 2018 Abstract: We
ClusterNet: Instance Segmentation in RGB-D Images Lin Shao, Ye Tian, Jeannette Bohg Stanford University United States lins2,yetian1,bohg@stanford.edu arxiv:1807.08894v1 [cs.ro] 24 Jul 2018 Abstract: We
DOMAIN ADAPTATION FOR STRUCTURED OUTPUT VIA DISENTANGLED PATCH REPRESENTATIONS
 DOMAIN ADAPTATION FOR STRUCTURED OUTPUT VIA DISENTANGLED PATCH REPRESENTATIONS Anonymous authors Paper under double-blind review ABSTRACT Predicting structured outputs such as semantic segmentation relies
DOMAIN ADAPTATION FOR STRUCTURED OUTPUT VIA DISENTANGLED PATCH REPRESENTATIONS Anonymous authors Paper under double-blind review ABSTRACT Predicting structured outputs such as semantic segmentation relies
Boosting LiDAR-based Semantic Labeling by Cross-Modal Training Data Generation
 Boosting LiDAR-based Semantic Labeling by Cross-Modal Training Data Generation Florian Piewak 1,2, Peter Pinggera 1, Manuel Schäfer 1, David Peter 1, Beate Schwarz 1, Nick Schneider 1, David Pfeiffer 1,
Boosting LiDAR-based Semantic Labeling by Cross-Modal Training Data Generation Florian Piewak 1,2, Peter Pinggera 1, Manuel Schäfer 1, David Peter 1, Beate Schwarz 1, Nick Schneider 1, David Pfeiffer 1,
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Collaborative Mapping with Streetlevel Images in the Wild. Yubin Kuang Co-founder and Computer Vision Lead
 Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
arxiv: v1 [cs.cv] 10 Nov 2017
![arxiv: v1 [cs.cv] 10 Nov 2017](/thumbs/74/70631687.jpg "arxiv: v1 [cs.cv] 10 Nov 2017") A FULLY CONVOLUTIONAL TRI-BRANCH NETWORK (FCTN) FOR DOMAIN ADAPTATION Junting Zhang, Chen Liang and C.-C. Jay Kuo University of Southern California, Los Angeles, CA 90089, USA arxiv:1711.03694v1 [cs.cv]
A FULLY CONVOLUTIONAL TRI-BRANCH NETWORK (FCTN) FOR DOMAIN ADAPTATION Junting Zhang, Chen Liang and C.-C. Jay Kuo University of Southern California, Los Angeles, CA 90089, USA arxiv:1711.03694v1 [cs.cv]
arxiv: v2 [cs.cv] 28 May 2017
![arxiv: v2 [cs.cv] 28 May 2017](/thumbs/76/73843498.jpg "arxiv: v2 [cs.cv] 28 May 2017") Fused DNN: A deep neural network fusion approach to fast and robust pedestrian detection Xianzhi Du 1, Mostafa El-Khamy 2, Jungwon Lee 2, Larry S. Davis 1 arxiv:1610.03466v2 [cs.cv] 28 May 2017 1 Computer
Fused DNN: A deep neural network fusion approach to fast and robust pedestrian detection Xianzhi Du 1, Mostafa El-Khamy 2, Jungwon Lee 2, Larry S. Davis 1 arxiv:1610.03466v2 [cs.cv] 28 May 2017 1 Computer
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Flow-Based Video Recognition
 Flow-Based Video Recognition Jifeng Dai Visual Computing Group, Microsoft Research Asia Joint work with Xizhou Zhu*, Yuwen Xiong*, Yujie Wang*, Lu Yuan and Yichen Wei (* interns) Talk pipeline Introduction
Flow-Based Video Recognition Jifeng Dai Visual Computing Group, Microsoft Research Asia Joint work with Xizhou Zhu*, Yuwen Xiong*, Yujie Wang*, Lu Yuan and Yichen Wei (* interns) Talk pipeline Introduction
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Thinking Outside the Box: Spatial Anticipation of Semantic Categories
 GARBADE, GALL: SPATIAL ANTICIPATION OF SEMANTIC CATEGORIES 1 Thinking Outside the Box: Spatial Anticipation of Semantic Categories Martin Garbade garbade@iai.uni-bonn.de Juergen Gall gall@iai.uni-bonn.de
GARBADE, GALL: SPATIAL ANTICIPATION OF SEMANTIC CATEGORIES 1 Thinking Outside the Box: Spatial Anticipation of Semantic Categories Martin Garbade garbade@iai.uni-bonn.de Juergen Gall gall@iai.uni-bonn.de
Traffic sign detection and recognition with convolutional neural networks
 38. Wissenschaftlich-Technische Jahrestagung der DGPF und PFGK18 Tagung in München Publikationen der DGPF, Band 27, 2018 Traffic sign detection and recognition with convolutional neural networks ALEXANDER
38. Wissenschaftlich-Technische Jahrestagung der DGPF und PFGK18 Tagung in München Publikationen der DGPF, Band 27, 2018 Traffic sign detection and recognition with convolutional neural networks ALEXANDER
arxiv: v2 [cs.cv] 6 Jul 2018
![arxiv: v2 [cs.cv] 6 Jul 2018](/thumbs/93/117988388.jpg "arxiv: v2 [cs.cv] 6 Jul 2018") arxiv:1807.02001v2 [cs.cv] 6 Jul 2018 Acquire, Augment, Segment & Enjoy: Weakly Supervised Instance Segmentation of Supermarket Products Patrick Follmann +*, Bertram Drost +, and Tobias Böttger +* + MVTec
arxiv:1807.02001v2 [cs.cv] 6 Jul 2018 Acquire, Augment, Segment & Enjoy: Weakly Supervised Instance Segmentation of Supermarket Products Patrick Follmann +*, Bertram Drost +, and Tobias Böttger +* + MVTec
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
... ISA 2 : Intelligent Speed Adaptation from Appearance. Carlos Herranz-Perdiguero 1 and Roberto J. López-Sastre 1
 ISA 2 : Intelligent Speed Adaptation from Appearance Carlos Herranz-Perdiguero 1 and Roberto J. López-Sastre 1 Abstract In this work we introduce a new problem named Intelligent Speed Adaptation from Appearance
ISA 2 : Intelligent Speed Adaptation from Appearance Carlos Herranz-Perdiguero 1 and Roberto J. López-Sastre 1 Abstract In this work we introduce a new problem named Intelligent Speed Adaptation from Appearance
arxiv: v1 [cs.cv] 1 Dec 2017
![arxiv: v1 [cs.cv] 1 Dec 2017](/thumbs/86/93359750.jpg "arxiv: v1 [cs.cv] 1 Dec 2017") Image to Image Translation for Domain Adaptation Zak Murez 1,2 Soheil Kolouri 2 David Kriegman 1 Ravi Ramamoorthi 1 Kyungnam Kim 2 1 University of California, San Diego; 2 HRL Laboratories, LLC; {zmurez,kriegman,ravir}@cs.ucsd.edu,
Image to Image Translation for Domain Adaptation Zak Murez 1,2 Soheil Kolouri 2 David Kriegman 1 Ravi Ramamoorthi 1 Kyungnam Kim 2 1 University of California, San Diego; 2 HRL Laboratories, LLC; {zmurez,kriegman,ravir}@cs.ucsd.edu,
Cloud-based Large Scale Video Analysis
 Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Fused DNN: A deep neural network fusion approach to fast and robust pedestrian detection
 2017 IEEE Winter Conference on Applications of Computer Vision Fused DNN: A deep neural network fusion approach to fast and robust pedestrian detection Xianzhi Du 1, Mostafa El-Khamy 2, Jungwon Lee 3,
2017 IEEE Winter Conference on Applications of Computer Vision Fused DNN: A deep neural network fusion approach to fast and robust pedestrian detection Xianzhi Du 1, Mostafa El-Khamy 2, Jungwon Lee 3,
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder
Learning Semantic Video Captioning using Data Generated with Grand Theft Auto
 A dark car is turning left on an exit Learning Semantic Video Captioning using Data Generated with Grand Theft Auto Alex Polis Polichroniadis Data Scientist, MSc Kolia Sadeghi Applied Mathematician, PhD
A dark car is turning left on an exit Learning Semantic Video Captioning using Data Generated with Grand Theft Auto Alex Polis Polichroniadis Data Scientist, MSc Kolia Sadeghi Applied Mathematician, PhD
Impact of Ground Truth Annotation Quality on Performance of Semantic Image Segmentation of Traffic Conditions
 Impact of Ground Truth Annotation Quality on Performance of Semantic Image Segmentation of Traffic Conditions Vlad Taran, Yuri Gordienko, Alexandr Rokovyi, Oleg Alienin, Sergii Stirenko National Technical
Impact of Ground Truth Annotation Quality on Performance of Semantic Image Segmentation of Traffic Conditions Vlad Taran, Yuri Gordienko, Alexandr Rokovyi, Oleg Alienin, Sergii Stirenko National Technical
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
Conditional Random Fields as Recurrent Neural Networks
 BIL722 - Deep Learning for Computer Vision Conditional Random Fields as Recurrent Neural Networks S. Zheng, S. Jayasumana, B. Romera-Paredes V. Vineet, Z. Su, D. Du, C. Huang, P.H.S. Torr Introduction
BIL722 - Deep Learning for Computer Vision Conditional Random Fields as Recurrent Neural Networks S. Zheng, S. Jayasumana, B. Romera-Paredes V. Vineet, Z. Su, D. Du, C. Huang, P.H.S. Torr Introduction
arxiv: v2 [cs.cv] 26 Mar 2018
![arxiv: v2 [cs.cv] 26 Mar 2018](/thumbs/85/92916828.jpg "arxiv: v2 [cs.cv] 26 Mar 2018") Repulsion Loss: Detecting Pedestrians in a Crowd Xinlong Wang 1 Tete Xiao 2 Yuning Jiang 3 Shuai Shao 3 Jian Sun 3 Chunhua Shen 4 arxiv:1711.07752v2 [cs.cv] 26 Mar 2018 1 Tongji University 1452405wxl@tongji.edu.cn
Repulsion Loss: Detecting Pedestrians in a Crowd Xinlong Wang 1 Tete Xiao 2 Yuning Jiang 3 Shuai Shao 3 Jian Sun 3 Chunhua Shen 4 arxiv:1711.07752v2 [cs.cv] 26 Mar 2018 1 Tongji University 1452405wxl@tongji.edu.cn
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving. Frank Schuster, Dr. Martin Haueis
 Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Deep Learning with Tensorflow AlexNet
 Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
arxiv: v1 [cs.cv] 27 Apr 2017
![arxiv: v1 [cs.cv] 27 Apr 2017](/thumbs/79/79134921.jpg "arxiv: v1 [cs.cv] 27 Apr 2017") No More Discrimination: Cross City Adaptation of Road Scene Segmenters Yi-Hsin Chen 1, Wei-Yu Chen 3,4, Yu-Ting Chen 1, Bo-Cheng Tsai 2, Yu-Chiang Frank Wang 4, Min Sun 1 arxiv:1704.08509v1 [cs.cv] 27
No More Discrimination: Cross City Adaptation of Road Scene Segmenters Yi-Hsin Chen 1, Wei-Yu Chen 3,4, Yu-Ting Chen 1, Bo-Cheng Tsai 2, Yu-Chiang Frank Wang 4, Min Sun 1 arxiv:1704.08509v1 [cs.cv] 27
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Learning to Generate Object Segmentation Proposals with Multi-modal Cues
 Learning to Generate Object Segmentation Proposals with Multi-modal Cues Haoyang Zhang 1,2, Xuming He 2,1, Fatih Porikli 1,2 1 The Australian National University, 2 Data61, CSIRO, Canberra, Australia {haoyang.zhang,xuming.he,
Learning to Generate Object Segmentation Proposals with Multi-modal Cues Haoyang Zhang 1,2, Xuming He 2,1, Fatih Porikli 1,2 1 The Australian National University, 2 Data61, CSIRO, Canberra, Australia {haoyang.zhang,xuming.he,
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Mask R-CNN. By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi
 Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Learning visual odometry with a convolutional network
 Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
Conditional Generative Adversarial Network for Structured Domain Adaptation
 Conditional Generative Adversarial Network for Structured Domain Adaptation Weixiang Hong Nanyang Technological University weixiang.hong@outlook.com Ming Yang Horizon Robotics, Inc. ming.yang@horizon-robotics.com
Conditional Generative Adversarial Network for Structured Domain Adaptation Weixiang Hong Nanyang Technological University weixiang.hong@outlook.com Ming Yang Horizon Robotics, Inc. ming.yang@horizon-robotics.com
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
An Exploration of Computer Vision Techniques for Bird Species Classification
 An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
FoveaNet: Perspective-aware Urban Scene Parsing
 FoveaNet: Perspective-aware Urban Scene Parsing Xin Li 1,2 Zequn Jie 3 Wei Wang 4,2 Changsong Liu 1 Jimei Yang 5 Xiaohui Shen 5 Zhe Lin 5 Qiang Chen 6 Shuicheng Yan 2,6 Jiashi Feng 2 1 Department of EE,
FoveaNet: Perspective-aware Urban Scene Parsing Xin Li 1,2 Zequn Jie 3 Wei Wang 4,2 Changsong Liu 1 Jimei Yang 5 Xiaohui Shen 5 Zhe Lin 5 Qiang Chen 6 Shuicheng Yan 2,6 Jiashi Feng 2 1 Department of EE,
Foveal Vision for Instance Segmentation of Road Images
 Foveal Vision for Instance Segmentation of Road Images Benedikt Ortelt 1, Christian Herrmann 2,3, Dieter Willersinn 2, Jürgen Beyerer 2,3 1 Robert Bosch GmbH, Leonberg, Germany 2 Fraunhofer IOSB, Karlsruhe,
Foveal Vision for Instance Segmentation of Road Images Benedikt Ortelt 1, Christian Herrmann 2,3, Dieter Willersinn 2, Jürgen Beyerer 2,3 1 Robert Bosch GmbH, Leonberg, Germany 2 Fraunhofer IOSB, Karlsruhe,
(Deep) Learning for Robot Perception and Navigation. Wolfram Burgard
 Learning for Robot Perception and Navigation. Wolfram Burgard") (Deep) Learning for Robot Perception and Navigation Wolfram Burgard Deep Learning for Robot Perception (and Navigation) Lifeng Bo, Claas Bollen, Thomas Brox, Andreas Eitel, Dieter Fox, Gabriel L. Oliveira,
(Deep) Learning for Robot Perception and Navigation Wolfram Burgard Deep Learning for Robot Perception (and Navigation) Lifeng Bo, Claas Bollen, Thomas Brox, Andreas Eitel, Dieter Fox, Gabriel L. Oliveira,
Semantic Segmentation with Scarce Data
 Semantic Segmentation with Scarce Data Isay Katsman * 1 Rohun Tripathi * 1 Andreas Veit 1 Serge Belongie 1 Abstract Semantic segmentation is a challenging vision problem that usually necessitates the collection
Semantic Segmentation with Scarce Data Isay Katsman * 1 Rohun Tripathi * 1 Andreas Veit 1 Serge Belongie 1 Abstract Semantic segmentation is a challenging vision problem that usually necessitates the collection
Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling
 [DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
[DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
Dark Model Adaptation: Semantic Image Segmentation from Daytime to Nighttime
 Dark Model Adaptation: Semantic Image Segmentation from Daytime to Nighttime Dengxin Dai 1 and Luc Van Gool 1,2 Abstract This work addresses the problem of semantic image segmentation of nighttime scenes.
Dark Model Adaptation: Semantic Image Segmentation from Daytime to Nighttime Dengxin Dai 1 and Luc Van Gool 1,2 Abstract This work addresses the problem of semantic image segmentation of nighttime scenes.
Boundary-aware Instance Segmentation
 Boundary-aware Instance Segmentation Zeeshan Hayder,2, Xuming He 2, Australian National University & 2 Data6/CSIRO Mathieu Salzmann 3 3 CVLab, EPFL, Switzerland Abstract We address the problem of instance-level
Boundary-aware Instance Segmentation Zeeshan Hayder,2, Xuming He 2, Australian National University & 2 Data6/CSIRO Mathieu Salzmann 3 3 CVLab, EPFL, Switzerland Abstract We address the problem of instance-level
Deep Learning for Remote Sensing
 1 ENPC Data Science Week Deep Learning for Remote Sensing Alexandre Boulch 2 ONERA Research, Innovation, expertise and long-term vision for industry, French government and Europe 3 Materials Optics Aerodynamics
1 ENPC Data Science Week Deep Learning for Remote Sensing Alexandre Boulch 2 ONERA Research, Innovation, expertise and long-term vision for industry, French government and Europe 3 Materials Optics Aerodynamics
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Speaker: Ming-Ming Cheng Nankai University 15-Sep-17 Towards Weakly Supervised Image Understanding
 Towards Weakly Supervised Image Understanding (WSIU) Speaker: Ming-Ming Cheng Nankai University http://mmcheng.net/ 1/50 Understanding Visual Information Image by kirkh.deviantart.com 2/50 Dataset Annotation
Towards Weakly Supervised Image Understanding (WSIU) Speaker: Ming-Ming Cheng Nankai University http://mmcheng.net/ 1/50 Understanding Visual Information Image by kirkh.deviantart.com 2/50 Dataset Annotation
arxiv: v1 [cs.cv] 1 Nov 2018
![arxiv: v1 [cs.cv] 1 Nov 2018](/thumbs/89/100791471.jpg "arxiv: v1 [cs.cv] 1 Nov 2018") Examining Performance of Sketch-to-Image Translation Models with Multiclass Automatically Generated Paired Training Data Dichao Hu College of Computing, Georgia Institute of Technology, 801 Atlantic Dr
Examining Performance of Sketch-to-Image Translation Models with Multiclass Automatically Generated Paired Training Data Dichao Hu College of Computing, Georgia Institute of Technology, 801 Atlantic Dr
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
A Study of Vehicle Detector Generalization on U.S. Highway
 26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
arxiv: v1 [cs.cv] 7 Jun 2016
![arxiv: v1 [cs.cv] 7 Jun 2016](/thumbs/86/93207990.jpg "arxiv: v1 [cs.cv] 7 Jun 2016") ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation arxiv:1606.02147v1 [cs.cv] 7 Jun 2016 Adam Paszke Faculty of Mathematics, Informatics and Mechanics University of Warsaw, Poland
ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation arxiv:1606.02147v1 [cs.cv] 7 Jun 2016 Adam Paszke Faculty of Mathematics, Informatics and Mechanics University of Warsaw, Poland
LinkNet: Exploiting Encoder Representations for Efficient Semantic Segmentation
 LinkNet: Exploiting Encoder Representations for Efficient Semantic Segmentation Abhishek Chaurasia School of Electrical and Computer Engineering Purdue University West Lafayette, USA Email: aabhish@purdue.edu
LinkNet: Exploiting Encoder Representations for Efficient Semantic Segmentation Abhishek Chaurasia School of Electrical and Computer Engineering Purdue University West Lafayette, USA Email: aabhish@purdue.edu
Part Localization by Exploiting Deep Convolutional Networks
 Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
Object Detection on Street View Images: from Panoramas to Geotags
 Machine Learning Dublin Meetup, 25 September 2017 The ADAPT Centre is funded under the SFI Research Centres Programme (Grant 13/RC/2106) and is co-funded under the European Regional Development Fund. Object
Machine Learning Dublin Meetup, 25 September 2017 The ADAPT Centre is funded under the SFI Research Centres Programme (Grant 13/RC/2106) and is co-funded under the European Regional Development Fund. Object
arxiv: v1 [cs.cv] 26 Nov 2018
![arxiv: v1 [cs.cv] 26 Nov 2018](/thumbs/91/105272742.jpg "arxiv: v1 [cs.cv] 26 Nov 2018") City-Scale Road Audit System using Deep Learning Sudhir Yarram Girish Varma C.V. Jawahar arxiv:1811.10210v1 [cs.cv] 26 Nov 2018 Abstract Road networks in cities are massive and is a critical component
City-Scale Road Audit System using Deep Learning Sudhir Yarram Girish Varma C.V. Jawahar arxiv:1811.10210v1 [cs.cv] 26 Nov 2018 Abstract Road networks in cities are massive and is a critical component
Supplementary Material: Efficient Interactive Annotation of Segmentation Datasets with Polygon-RNN++
 Supplementary Material: Efficient Interactive Annotation of Segmentation Datasets with Polygon-RNN++ David Acuna 1,3, Huan Ling 1,2 Amlan Kar 1,2, Sanja Fidler 1,2 1 University of Toronto 2 Vector Institute
Supplementary Material: Efficient Interactive Annotation of Segmentation Datasets with Polygon-RNN++ David Acuna 1,3, Huan Ling 1,2 Amlan Kar 1,2, Sanja Fidler 1,2 1 University of Toronto 2 Vector Institute
Semantic Segmentation, Urban Navigation, and Research Directions
 Semantic Segmentation, Urban Navigation, and Research Directions Qasim Nadeem Princeton University qnadeem@cs.princeton.edu Abstract We introduce and give a detailed review of semantic segmentation. We
Semantic Segmentation, Urban Navigation, and Research Directions Qasim Nadeem Princeton University qnadeem@cs.princeton.edu Abstract We introduce and give a detailed review of semantic segmentation. We
Ryerson University CP8208. Soft Computing and Machine Intelligence. Naive Road-Detection using CNNS. Authors: Sarah Asiri - Domenic Curro
 Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
SGN: Sequential Grouping Networks for Instance Segmentation
 SGN: Sequential Grouping Networks for Instance Segmentation Shu Liu Jiaya Jia,[ Sanja Fidler Raquel Urtasun, The Chinese University of Hong Kong [ Youtu Lab, Tencent Uber Advanced Technologies Group University
SGN: Sequential Grouping Networks for Instance Segmentation Shu Liu Jiaya Jia,[ Sanja Fidler Raquel Urtasun, The Chinese University of Hong Kong [ Youtu Lab, Tencent Uber Advanced Technologies Group University
Scene Parsing with Global Context Embedding
 Scene Parsing with Global Context Embedding Wei-Chih Hung 1, Yi-Hsuan Tsai 1,2, Xiaohui Shen 3, Zhe Lin 3, Kalyan Sunkavalli 3, Xin Lu 3, Ming-Hsuan Yang 1 1 University of California, Merced 2 NEC Laboratories
Scene Parsing with Global Context Embedding Wei-Chih Hung 1, Yi-Hsuan Tsai 1,2, Xiaohui Shen 3, Zhe Lin 3, Kalyan Sunkavalli 3, Xin Lu 3, Ming-Hsuan Yang 1 1 University of California, Merced 2 NEC Laboratories
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015
 CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
Extended Dictionary Learning : Convolutional and Multiple Feature Spaces
 Extended Dictionary Learning : Convolutional and Multiple Feature Spaces Konstantina Fotiadou, Greg Tsagkatakis & Panagiotis Tsakalides kfot@ics.forth.gr, greg@ics.forth.gr, tsakalid@ics.forth.gr ICS-
Extended Dictionary Learning : Convolutional and Multiple Feature Spaces Konstantina Fotiadou, Greg Tsagkatakis & Panagiotis Tsakalides kfot@ics.forth.gr, greg@ics.forth.gr, tsakalid@ics.forth.gr ICS-
arxiv: v1 [cs.mm] 12 Jan 2016
![arxiv: v1 [cs.mm] 12 Jan 2016](/thumbs/73/69424856.jpg "arxiv: v1 [cs.mm] 12 Jan 2016") Learning Subclass Representations for Visually-varied Image Classification Xinchao Li, Peng Xu, Yue Shi, Martha Larson, Alan Hanjalic Multimedia Information Retrieval Lab, Delft University of Technology
Learning Subclass Representations for Visually-varied Image Classification Xinchao Li, Peng Xu, Yue Shi, Martha Larson, Alan Hanjalic Multimedia Information Retrieval Lab, Delft University of Technology
arxiv: v1 [cs.cv] 6 Mar 2018
![arxiv: v1 [cs.cv] 6 Mar 2018](/thumbs/90/102827010.jpg "arxiv: v1 [cs.cv] 6 Mar 2018") Early Start Intention Detection of Cyclists Using Motion History Images and a Deep Residual Network Stefan Zernetsch, Viktor Kress, Bernhard Sick and Konrad Doll arxiv:1803.02242v1 [cs.cv] 6 Mar 2018 Abstract
Early Start Intention Detection of Cyclists Using Motion History Images and a Deep Residual Network Stefan Zernetsch, Viktor Kress, Bernhard Sick and Konrad Doll arxiv:1803.02242v1 [cs.cv] 6 Mar 2018 Abstract
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
Learning-based Localization
 Learning-based Localization Eric Brachmann ECCV 2018 Tutorial on Visual Localization - Feature-based vs. Learned Approaches Torsten Sattler, Eric Brachmann Roadmap Machine Learning Basics [10min] Convolutional
Learning-based Localization Eric Brachmann ECCV 2018 Tutorial on Visual Localization - Feature-based vs. Learned Approaches Torsten Sattler, Eric Brachmann Roadmap Machine Learning Basics [10min] Convolutional
Bringing Background into the Foreground: Making All Classes Equal in Weakly-supervised Video Semantic Segmentation
 Bringing Background into the Foreground: Making All Classes Equal in Weakly-supervised Video Semantic Segmentation Fatemeh Sadat Saleh 1,2, Mohammad Sadegh Aliakbarian 1,2, Mathieu Salzmann 3, Lars Petersson
Bringing Background into the Foreground: Making All Classes Equal in Weakly-supervised Video Semantic Segmentation Fatemeh Sadat Saleh 1,2, Mohammad Sadegh Aliakbarian 1,2, Mathieu Salzmann 3, Lars Petersson
arxiv: v1 [cs.cv] 12 May 2018
![arxiv: v1 [cs.cv] 12 May 2018](/thumbs/82/86383091.jpg "arxiv: v1 [cs.cv] 12 May 2018") arxiv:1805.04687v1 [cs.cv] 12 May 2018 BDD100K: A Diverse Driving Video Database with Scalable Annotation Tooling Fisher Yu 1 Wenqi Xian 2 Yingying Chen 1 Fangchen Liu 3 Mike Liao 1 Vashisht Madhavan 4
arxiv:1805.04687v1 [cs.cv] 12 May 2018 BDD100K: A Diverse Driving Video Database with Scalable Annotation Tooling Fisher Yu 1 Wenqi Xian 2 Yingying Chen 1 Fangchen Liu 3 Mike Liao 1 Vashisht Madhavan 4
arxiv: v1 [cs.cv] 8 Dec 2016
![arxiv: v1 [cs.cv] 8 Dec 2016](/thumbs/84/89142732.jpg "arxiv: v1 [cs.cv] 8 Dec 2016") Predicting Ground-Level Scene Layout from Aerial Imagery Menghua Zhai Zachary Bessinger Scott Workman Nathan Jacobs Computer Science, University of Kentucky {ted, zach, scott, jacobs}@cs.uky.edu arxiv:1612.02709v1
Predicting Ground-Level Scene Layout from Aerial Imagery Menghua Zhai Zachary Bessinger Scott Workman Nathan Jacobs Computer Science, University of Kentucky {ted, zach, scott, jacobs}@cs.uky.edu arxiv:1612.02709v1
Predicting Ground-Level Scene Layout from Aerial Imagery
 Predicting Ground-Level Scene Layout from Aerial Imagery Menghua Zhai ted@cs.uky.edu Zachary Bessinger Scott Workman zach@cs.uky.edu scott@cs.uky.edu Computer Science, University of Kentucky Nathan Jacobs
Predicting Ground-Level Scene Layout from Aerial Imagery Menghua Zhai ted@cs.uky.edu Zachary Bessinger Scott Workman zach@cs.uky.edu scott@cs.uky.edu Computer Science, University of Kentucky Nathan Jacobs
Detecting and Parsing of Visual Objects: Humans and Animals. Alan Yuille (UCLA)
") Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
Occluded Pedestrian Detection Through Guided Attention in CNNs
 Occluded Pedestrian Detection Through Guided Attention in CNNs Shanshan Zhang 1, Jian Yang 2, Bernt Schiele 3 1 Key Lab of Intelligent Perception and Systems for High-Dimensional Information of Ministry
Occluded Pedestrian Detection Through Guided Attention in CNNs Shanshan Zhang 1, Jian Yang 2, Bernt Schiele 3 1 Key Lab of Intelligent Perception and Systems for High-Dimensional Information of Ministry
Towards Large-Scale Semantic Representations for Actionable Exploitation. Prof. Trevor Darrell UC Berkeley
 Towards Large-Scale Semantic Representations for Actionable Exploitation Prof. Trevor Darrell UC Berkeley traditional surveillance sensor emerging crowd sensor Desired capabilities: spatio-temporal reconstruction
Towards Large-Scale Semantic Representations for Actionable Exploitation Prof. Trevor Darrell UC Berkeley traditional surveillance sensor emerging crowd sensor Desired capabilities: spatio-temporal reconstruction
INFLUENCE OF DOMAIN SHIFT FACTORS ON DEEP SEGMENTATION OF THE DRIVABLE PATH OF AN AUTONOMOUS VEHICLE
 The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLII-2, 2018 INFLUENCE OF DOMAIN SHIFT FACTORS ON DEEP SEGMENTATION OF THE DRIVABLE PATH OF AN
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLII-2, 2018 INFLUENCE OF DOMAIN SHIFT FACTORS ON DEEP SEGMENTATION OF THE DRIVABLE PATH OF AN
DEEP CNN WITH COLOR LINES MODEL FOR UNMARKED ROAD SEGMENTATION. New Delhi New Delhi
 DEEP CNN WITH COLOR LINES MODEL FOR UNMARKED ROAD SEGMENTATION Shashank Yadav 1 Suvam Patra 1 Chetan Arora 2 Subhashis Banerjee 1 1 Indian Institute of Technology Delhi 2 Indraprastha Institute of Information
DEEP CNN WITH COLOR LINES MODEL FOR UNMARKED ROAD SEGMENTATION Shashank Yadav 1 Suvam Patra 1 Chetan Arora 2 Subhashis Banerjee 1 1 Indian Institute of Technology Delhi 2 Indraprastha Institute of Information
Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
 Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Fully Convolutional Adaptation Networks for Semantic Segmentation
 Fully Convolutional Adaptation Networks for Semantic Segmentation Yiheng Zhang, Zhaofan Qiu, Ting Yao, Dong Liu, and Tao Mei University of Science and Technology of China, Hefei, China Microsoft Research,
Fully Convolutional Adaptation Networks for Semantic Segmentation Yiheng Zhang, Zhaofan Qiu, Ting Yao, Dong Liu, and Tao Mei University of Science and Technology of China, Hefei, China Microsoft Research,
Object Geolocation from Crowdsourced Street Level Imagery
 Object Geolocation from Crowdsourced Street Level Imagery Vladimir A. Krylov and Rozenn Dahyot ADAPT Centre, School of Computer Science and Statistics, Trinity College Dublin, Dublin, Ireland {vladimir.krylov,rozenn.dahyot}@tcd.ie
Object Geolocation from Crowdsourced Street Level Imagery Vladimir A. Krylov and Rozenn Dahyot ADAPT Centre, School of Computer Science and Statistics, Trinity College Dublin, Dublin, Ireland {vladimir.krylov,rozenn.dahyot}@tcd.ie
Label Propagation in RGB-D Video
 Label Propagation in RGB-D Video Md. Alimoor Reza, Hui Zheng, Georgios Georgakis, Jana Košecká Abstract We propose a new method for the propagation of semantic labels in RGB-D video of indoor scenes given
Label Propagation in RGB-D Video Md. Alimoor Reza, Hui Zheng, Georgios Georgakis, Jana Košecká Abstract We propose a new method for the propagation of semantic labels in RGB-D video of indoor scenes given