Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences
|
|
|
- Earl Chandler
- 5 years ago
- Views:
Transcription


1 the question of whether computers can think is like the question of whether submarines can swim -- Dijkstra Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences : A rule of thumb, simplification, or educated guess that reduces or limits the search for solutions in domains that are difficult and poorly understood.

2 Announcements HW1 due Sunday night, January 11:55pm HW2 is much more challenging than HW1. Start early! Waitlist? Attendance Game engine & HWs piazza only; please no posting Office hours Special lectures (Guzdial, Russell)
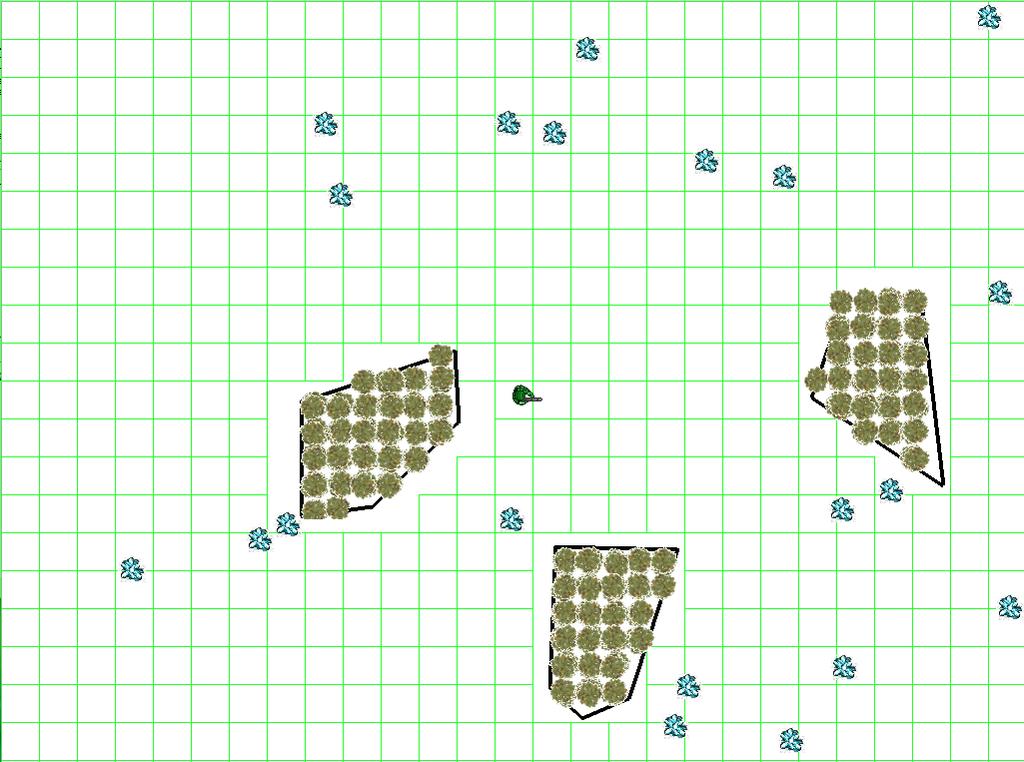
3 Grid Generation Hints Verify no world line goes through grid lines (raytraceworld) Verify no obstacle point within grid cell (pointinsidepolygonpoints, for each obst.) Please check the following sections Miscellaneous utility functions Hints
4
5 PREVIOUSLY ON
6 Class N-2: What is GAI? Set of tricks and techniques to bring about a particular game design. Goals include: enhancing the player s engagement, enjoyment, and experience End behavior is the target Do better than random doing things the player or designer cannot do or don t want to do replace real people when they are unwilling or unavailable to play aid for designers and developers making the entities, opponents, agents, companions, etc. in games appear intelligent believable characters / looking convincing A Game? A system of rules and a goal and agency.
7 N-2: How/Why distinct from academic AI Supporting the player experience Good game AI == matching right behaviors to right algorithms Product is the target, not clever coding ends justify means. FUN Illusion of intelligence Magic Circle (Rules of play: game design fundamentals) Elegance in simplicity & the complexity fallacy Quality control & resource limits Fun vs smart: goal is not always to beat the player Optimal/rational is rarely the right thing to do
8 N-2: Common (game) AI Tricks? Move before firing no cheap shots Be visible Have horrible aim (being Rambo is fun) Miss the first time Warn the player Attack kung fu style (Fist of Fury; BL vs School) Tell the player what you are doing (especially companions) React to own mistakes Pull back at the last minute Intentional vulnerabilities or predictable patterns Liden, Artificial Stupidity: The Art of Intentional Mistakes. AI Game Programming Wisdom.

9 N-2: Major ways GameAI is used In game Movement Decision making Strategy Tailoring/adapting to player individual differences Drama Management Out of game PCG Quality control / testing M&F Fig 1.1
10 N-2: Why AI is important for games Why is it essential to the modeled world? NPC s of all types: opponents, helpers, extras, How can it hurt? Unrealistic characters reduced immersion Stupid, lame behaviors reduced fun Superhuman behaviors reduced fun Until recently, given short shrift by developers. Why? Graphics ate almost all the resources Can t start developing the AI until the modeled world was ready to run AI development always late in development cycle Situation rapidly changing / changed. How? AI now viewed as helpful in selling the product Still one of the key constraints on game design Credit: Dr. Ken Forbus
11 N-1: Intro, Graph and Search 1. How do intentional mistakes help games? 2. What defines a graph? 3. What defines graph search? 4. Name 3 uniformed graphs search algorithms. 5. Name an informed graph search algorithm? 6. What is a heuristic? 7. Admissible heuristics never estimate 8. Examples of using graphs for games
12 Sidebar: Iterative Deepening mid 1970s Idea: perform depth-limited DFS repeatedly, with an increasing depth limit, until a solution is found. Each repetition of depth-limited DFS needlessly duplicates all prior work? Duplication is not significant because a branching factor b > 1 implies that the number of nodes at depth k exactly is much greater than the total number of nodes at all depths k-1 and less. That is: most nodes are in the bottom level.
13 Number of nodes Full, complete, balanced binary tree, height h Number of nodes N = 2^{h+1} 1 Height 0: 2^0 = 1 Height 1: 2^1 = 2 Height 2: 2^2 = 4 Height 3: 2^3 = 8 N = ^2 + 2^ ^h = (2^{h+1} 1) / (2 1) = 2^{h+1} - 1 Number of leaves L = 2^h Height 42, N = 8,796,093,022,207 L = 4,398,046,511,104
14 BRIEF RECAP OF LAST TIME
15 Graphs: Killer App in GAI Navigation / Pathfinding Navgraph: abstraction of all locations and their connections Cost / weight can represent terrain features (water, mud, hill), stealth (sound to traverse), etc What to do when Map features move Map is continuous, or 100K+ nodes? 3D spaces?
16 Graph Search Uninformed (all nodes are same) DFS (stack lifo), BFS (queue fifo) Iterative-deepening (Depth-limited) Informed (pick order of node expansion) Dijkstra guarantee shortest path (Elog 2 N) A* (IDA*). Dijkstra + heuristic D* Hierarchical can help
17 Heuristics [dictionary] A rule of thumb, simplification, or educated guess that reduces or limits the search for solutions in domains that are difficult and poorly understood. h(n) = estimated cost of cheapest path from n to goal (with goal == 0)
18 Path finding models 1. Tile-based graph grid navigation Simplest topography assume static obstacles imaginary latice of cells superimposed over an environment such that an agent can be in one cell at a time. Moving in a grid is relatively straightforward: from any cell, an agent can traverse to any of its four (or eight) neighboring cells 2. Path Networks / Points of Visibility NavGraph 3. Expanded Geometry 4. NavMesh
19 Model 1: Grid Navigation 2D tile representation mapped to floor/level Squares, hex; 8 or 6 neighbors / connectivity Mainly RTS games One entity/unit per cell Each cell can be assigned terrain type Bit mask for non-traversable areas Navigation: A* (or perhaps greedy), Dijkstra html
20 Path Planner Initial state (cell), Goal state (cell) Each cell is a state agent can occupy Sort successors, try one at a time (backtrack) Heuristic: Manhattan or straight-line distance Each successor stores who generated it
21 Question What are pros and cons of a grid representation of space in terms of character movement?
22 Grid navigation: pros Discrete space is simple Can be generated algorithmically at runtime (Hw1) Good for large number of units A*/greedy search works really well on grids (uniform action cost, not many tricky spots)
23 Grid navigation: cons Discretization wastes space Agent movement is jagged/awkward/blocky, though can be smoothed Some genres need continuous spaces Partial-blocking hurts validity Search must visit a lot of nodes (cells) Search spaces can quickly become huge E.g. 100x100 map == 10k nodes and ~78k edges
24 New Problems Generation Validity Quantization Converting an in-game position (for yourself or an object) into a graph node Localization Convert nodes back into game world locations (for interaction and movement) Awkward agent movement Long search times

25 Validity not all points in a grid square are reachable from each other!

26 Fixing awkward agent movement: String pulling Splines Hierarchical A*
27 Graphs, Search, & Path Planning Continued: Models of world for path planning ; See also: Buckland Ch 5 & 8, Millington & Funge Ch 4
28 Path finding models 1. Tile-based graph grid navigation 2. Path Networks / Points of Visibility NavGraph does not require the agent to be at one of the path nodes at all times. The agent can be at any point in the terrain. When the agent needs to move to a different location and an obstacle is in the way, the agent can move to the nearest path node accessible by straight-line movement and then find a path through the edges of the path network to another path node near to the desired destination. 3. Expanded Geometry 4. NavMesh
29 Model 2: Path Networks POV: Points of visibility NavGraph (see B CH 8) Discretization of space into sparse network of nodes Two-tiered navigation system Local, continuous Remote Connects points visible to each other in all important areas of map Usually hand-tailored (can use flood-fill)



30
31 Path network navigation Path nodes Option 1: manual path node placement Option 2: automatic path node placement What happens if you want to go to a place you cannot see? Can t get there from here Local search Flood fill (increase granularity of nav graph)

32 Flood Fill Start with seed grow graph Designer can move, delete, or add nodes Ensure all nodes and edges are at least as far from walls as agents bounding radius Buckland Figure 8.7
33 Using the path network Basic AI steps when told to go to target X 1. Find the closest visible graph node (A) 2. Find the closest visible graph node to X (B) 3. Search for lowest cost path from A to B 4. Move to A 5. Traverse path 6. Move from B to X Problem: Unsightly paths.
34
35
36
37 Unnecessary double-backs (unsightly)
38 Source not in sight of navigation point
39 Destination not in sight of a navigation point

40 Using a path node network Bot decides to go to 8 Get on the network at closest node (4) Ask: where to next to get to 8? Global table, or store in nodes themselves Node 7: Go to node 3 Node 4: Go to node 1

41 ??

42 Buckland Figure 8.6
43 Create navigation table For any two nodes (a, b) tells the agent what node, c to go to next. For source node v: For each node u: Follow the parent links until you get to v Record the last node before getting to v Dijkstra running time: O( V 2 ) Fully path node process: O( V 3 ) * Can run in O( E + V log V ) * Run Djikstra V times.
44 Question What are pros and cons of a path network representation of space?
45 Path network: pros Discretization of space is (can be) very small Does not require agent to be at one of path nodes at all times (unlike grid) Can be used with navigation mesh to automatically identify where to place path nodes (we will see this later) Continuous, non-grid movement in local area Switch between local and remote navigation Plays nice with steering behaviors (we will discuss these later) Good for FPS, RPGs Can indicate special spots (e.g. sniping, crouching, etc.)
46 Path network: cons Getting on and off the network can be awkward Path node placement Difficult for complex maps May have invisible spots Dynamic pathing in destructible terrain Doesn t fit well with map-generation features in games Fog-of-war in RTSs

47 Fog of war
48 Path finding models 1. Tile-based graph grid navigation 2. Path Networks / Points of Visibility NavGraph 3. Expanded Geometry Discretization of space can be smaller 2 tier nav: Continuous, non-grid movement in local area Can work with auto map generation Can plan nicely with steering behaviors 4. NavMesh
49 Model 3: Expanded Geometry Automatic, and no wall bumping. Also a two-tiered navigation system Local, continuous Remote Automatically expand boundaries of obstacles ( agent_radius) Add vertices as nodes Test line of sight for all vertices (O(n 2 )) Add edges where (v 1, v 2 ) == true
50 Simple Geometry
51 Expanded Geometry
52 Expanded Geometry

53 Finished POV Nav Graph
54 Expanded Geo: pros Discretization of space can be smaller Continuous, non-grid movement in local area Can work with auto map generation Switch between local and remote navigation Can play nice with steering behaviors
55 Expanded Geo: cons Getting on and off the network can be even more awkward Dynamic pathing in destructible terrain (?) Fog-of-war in RTSs
56 Path finding models 1. Tile-based graph grid navigation 2. Path Networks / Points of Visibility NavGraph 3. Expanded Geometry 4. NavMesh
Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences
 Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences : A rule of thumb, simplification, or educated guess that reduces
Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences : A rule of thumb, simplification, or educated guess that reduces
I may not have gone where I intended to go, but I think I have ended up where I needed to be. Douglas Adams
 Disclaimer: I use these notes as a guide rather than a comprehensive coverage of the topic. They are neither a substitute for attending the lectures nor for reading the assigned material. I may not have
Disclaimer: I use these notes as a guide rather than a comprehensive coverage of the topic. They are neither a substitute for attending the lectures nor for reading the assigned material. I may not have
I may not have gone where I intended to go, but I think I have ended up where I needed to be. Douglas Adams
 Disclaimer: I use these notes as a guide rather than a comprehensive coverage of the topic. They are neither a substitute for attending the lectures nor for reading the assigned material. I may not have
Disclaimer: I use these notes as a guide rather than a comprehensive coverage of the topic. They are neither a substitute for attending the lectures nor for reading the assigned material. I may not have
Notes. Video Game AI: Lecture 5 Planning for Pathfinding. Lecture Overview. Knowledge vs Search. Jonathan Schaeffer this Friday
 Notes Video Game AI: Lecture 5 Planning for Pathfinding Nathan Sturtevant COMP 3705 Jonathan Schaeffer this Friday Planning vs localization We cover planning today Localization is just mapping a real-valued
Notes Video Game AI: Lecture 5 Planning for Pathfinding Nathan Sturtevant COMP 3705 Jonathan Schaeffer this Friday Planning vs localization We cover planning today Localization is just mapping a real-valued
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2. Problem Solving Agents. Problem Solving Agents: Assumptions
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Pathfinding. Pathfinding Planned Movement
 345 Ludic Computing Lecture 10 Pathfinding Simon Colton & Alison Pease Computational Creativity Group Department of Computing Imperial College London www.doc.ic.ac.uk/ccg 1 Pathfinding Planned Movement
345 Ludic Computing Lecture 10 Pathfinding Simon Colton & Alison Pease Computational Creativity Group Department of Computing Imperial College London www.doc.ic.ac.uk/ccg 1 Pathfinding Planned Movement
CPS 170: Artificial Intelligence Search
 CPS 170: Artificial Intelligence http://www.cs.duke.edu/courses/spring09/cps170/ Search Instructor: Vincent Conitzer Search We have some actions that can change the state of the world Change resulting
CPS 170: Artificial Intelligence http://www.cs.duke.edu/courses/spring09/cps170/ Search Instructor: Vincent Conitzer Search We have some actions that can change the state of the world Change resulting
Route planning / Search Movement Group behavior Decision making
 Game AI Where is the AI Route planning / Search Movement Group behavior Decision making General Search Algorithm Design Keep a pair of set of states: One, the set of states to explore, called the open
Game AI Where is the AI Route planning / Search Movement Group behavior Decision making General Search Algorithm Design Keep a pair of set of states: One, the set of states to explore, called the open
Heuristic Search and Advanced Methods
 Heuristic Search and Advanced Methods Computer Science cpsc322, Lecture 3 (Textbook Chpt 3.6 3.7) May, 15, 2012 CPSC 322, Lecture 3 Slide 1 Course Announcements Posted on WebCT Assignment1 (due on Thurs!)
Heuristic Search and Advanced Methods Computer Science cpsc322, Lecture 3 (Textbook Chpt 3.6 3.7) May, 15, 2012 CPSC 322, Lecture 3 Slide 1 Course Announcements Posted on WebCT Assignment1 (due on Thurs!)
Informed Search CS457 David Kauchak Fall 2011
 Admin Informed Search CS57 David Kauchak Fall 011 Some material used from : Sara Owsley Sood and others Q3 mean: 6. median: 7 Final projects proposals looked pretty good start working plan out exactly
Admin Informed Search CS57 David Kauchak Fall 011 Some material used from : Sara Owsley Sood and others Q3 mean: 6. median: 7 Final projects proposals looked pretty good start working plan out exactly
Topic 16: Graphs in Game AI
 Topic 16: Graphs in Game AI CSSE CITS4242 Game Design and Multi-Media Graphs in Game AI When developing the AI for games, one of the most common uses of graphs is to represent a network of paths an agent
Topic 16: Graphs in Game AI CSSE CITS4242 Game Design and Multi-Media Graphs in Game AI When developing the AI for games, one of the most common uses of graphs is to represent a network of paths an agent
Outline. Best-first search
 Outline Best-first search Greedy best-first search A* search Heuristics Admissible Heuristics Graph Search Consistent Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing
Outline Best-first search Greedy best-first search A* search Heuristics Admissible Heuristics Graph Search Consistent Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing
Artificial Intelligence Informed search. Peter Antal
 Artificial Intelligence Informed search Peter Antal antal@mit.bme.hu 1 Informed = use problem-specific knowledge Which search strategies? Best-first search and its variants Heuristic functions? How to
Artificial Intelligence Informed search Peter Antal antal@mit.bme.hu 1 Informed = use problem-specific knowledge Which search strategies? Best-first search and its variants Heuristic functions? How to
Problem Solving and Search
 Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2: Search. Problem Solving Agents
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2: Search Prof. 1 2 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions?
Class Overview COMP 3501 / COMP 4704-4 Lecture 2: Search Prof. 1 2 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions?
Search and Games. Adi Botea. ANU Summer Schools in Logic and Learning February, 2009
 Search and Games Adi Botea ANU Summer Schools in Logic and Learning February, 2009 Outline 1 Introduction 2 Problem Representation 3 Uninformed Search 4 Informed Search 5 Hierarchical Abstraction Outline
Search and Games Adi Botea ANU Summer Schools in Logic and Learning February, 2009 Outline 1 Introduction 2 Problem Representation 3 Uninformed Search 4 Informed Search 5 Hierarchical Abstraction Outline
Artificial Intelligence
 Artificial Intelligence Lecture 02 - Pathfinding Edirlei Soares de Lima Game AI Model Pathfinding Steering behaviours Finite state machines Automated planning Behaviour trees
Artificial Intelligence Lecture 02 - Pathfinding Edirlei Soares de Lima Game AI Model Pathfinding Steering behaviours Finite state machines Automated planning Behaviour trees
CS 387/680: GAME AI PATHFINDING
 CS 387/680: GAME AI PATHFINDING 4/16/2015 Instructor: Santiago Ontañón santi@cs.drexel.edu Class website: https://www.cs.drexel.edu/~santi/teaching/2015/cs387/intro.html Reminders Check BBVista site for
CS 387/680: GAME AI PATHFINDING 4/16/2015 Instructor: Santiago Ontañón santi@cs.drexel.edu Class website: https://www.cs.drexel.edu/~santi/teaching/2015/cs387/intro.html Reminders Check BBVista site for
Lecture 4: Search 3. Victor R. Lesser. CMPSCI 683 Fall 2010
 Lecture 4: Search 3 Victor R. Lesser CMPSCI 683 Fall 2010 First Homework 1 st Programming Assignment 2 separate parts (homeworks) First part due on (9/27) at 5pm Second part due on 10/13 at 5pm Send homework
Lecture 4: Search 3 Victor R. Lesser CMPSCI 683 Fall 2010 First Homework 1 st Programming Assignment 2 separate parts (homeworks) First part due on (9/27) at 5pm Second part due on 10/13 at 5pm Send homework
Motion Planning, Part III Graph Search, Part I. Howie Choset
 Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Artificial Intelligence
 Artificial Intelligence Informed Search and Exploration Chapter 4 (4.1 4.2) A General Search algorithm: Chapter 3: Search Strategies Task : Find a sequence of actions leading from the initial state to
Artificial Intelligence Informed Search and Exploration Chapter 4 (4.1 4.2) A General Search algorithm: Chapter 3: Search Strategies Task : Find a sequence of actions leading from the initial state to
ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING
 LECTURES 2 AND 3: PROBLEM SOLVING") ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING BY SEARCH Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Problem solving by searching Problem formulation Example problems Search
ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING BY SEARCH Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Problem solving by searching Problem formulation Example problems Search
Outline for today s lecture. Informed Search I. One issue: How to search backwards? Very briefly: Bidirectional search. Outline for today s lecture
 Outline for today s lecture Informed Search I Uninformed Search Briefly: Bidirectional Search (AIMA 3.4.6) Uniform Cost Search (UCS) Informed Search Introduction to Informed search Heuristics 1 st attempt:
Outline for today s lecture Informed Search I Uninformed Search Briefly: Bidirectional Search (AIMA 3.4.6) Uniform Cost Search (UCS) Informed Search Introduction to Informed search Heuristics 1 st attempt:
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning
 6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Informed Search A* Algorithm
 Informed Search A* Algorithm CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2018 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Most slides have
Informed Search A* Algorithm CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2018 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Most slides have
CMU-Q Lecture 2: Search problems Uninformed search. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
Informed search. Soleymani. CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016
 Informed search CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Best-first search Greedy
Informed search CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Best-first search Greedy
Artificial Intelligence
 Artificial Intelligence CSC348 Unit 3: Problem Solving and Search Syedur Rahman Lecturer, CSE Department North South University syedur.rahman@wolfson.oxon.org Artificial Intelligence: Lecture Notes The
Artificial Intelligence CSC348 Unit 3: Problem Solving and Search Syedur Rahman Lecturer, CSE Department North South University syedur.rahman@wolfson.oxon.org Artificial Intelligence: Lecture Notes The
CS248. Game Mechanics
 CS248 Game Mechanics INTRODUCTION TOM WANG 2007 BS/MS CS KEY GAME MECHANICS * * * * * WORLD BUILDING CONTROLS CAMERA AI PERFORMANCE WORLD BUILDING WORLD BUILDING Set the atmosphere and tone of the game.
CS248 Game Mechanics INTRODUCTION TOM WANG 2007 BS/MS CS KEY GAME MECHANICS * * * * * WORLD BUILDING CONTROLS CAMERA AI PERFORMANCE WORLD BUILDING WORLD BUILDING Set the atmosphere and tone of the game.
Lecture 2: Fun with Search. Rachel Greenstadt CS 510, October 5, 2017
 Lecture 2: Fun with Search Rachel Greenstadt CS 510, October 5, 2017 Reminder! Project pre-proposals due tonight Overview Uninformed search BFS, DFS, Uniform-Cost, Graph-Search Informed search Heuristics,
Lecture 2: Fun with Search Rachel Greenstadt CS 510, October 5, 2017 Reminder! Project pre-proposals due tonight Overview Uninformed search BFS, DFS, Uniform-Cost, Graph-Search Informed search Heuristics,
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
Informed Search. CMU Snake Robot. Administrative. Uninformed search strategies. Assignment 1 was due before class how d it go?
 Informed Search S151 David Kauchak Fall 2010 MU Snake Robot http://www-cgi.cs.cmu.edu/afs/cs.cmu.edu/web/people/biorobotics/projects/ modsnake/index.html Some material borrowed from : Sara Owsley Sood
Informed Search S151 David Kauchak Fall 2010 MU Snake Robot http://www-cgi.cs.cmu.edu/afs/cs.cmu.edu/web/people/biorobotics/projects/ modsnake/index.html Some material borrowed from : Sara Owsley Sood
CS 4700: Foundations of Artificial Intelligence. Bart Selman. Search Techniques R&N: Chapter 3
 CS 4700: Foundations of Artificial Intelligence Bart Selman Search Techniques R&N: Chapter 3 Outline Search: tree search and graph search Uninformed search: very briefly (covered before in other prerequisite
CS 4700: Foundations of Artificial Intelligence Bart Selman Search Techniques R&N: Chapter 3 Outline Search: tree search and graph search Uninformed search: very briefly (covered before in other prerequisite
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Branch & Bound (B&B) and Constraint Satisfaction Problems (CSPs)
 and Constraint Satisfaction Problems (CSPs)") Branch & Bound (B&B) and Constraint Satisfaction Problems (CSPs) Alan Mackworth UBC CS 322 CSP 1 January 25, 2013 P&M textbook 3.7.4 & 4.0-4.2 Lecture Overview Recap Branch & Bound Wrap up of search module
Branch & Bound (B&B) and Constraint Satisfaction Problems (CSPs) Alan Mackworth UBC CS 322 CSP 1 January 25, 2013 P&M textbook 3.7.4 & 4.0-4.2 Lecture Overview Recap Branch & Bound Wrap up of search module
CS 4700: Artificial Intelligence
 CS 4700: Foundations of Artificial Intelligence Fall 2017 Instructor: Prof. Haym Hirsh Lecture 7 Extra Credit Opportunity: Lecture Today 4:15pm Gates G01 Learning to See Without a Teacher Phillip Isola
CS 4700: Foundations of Artificial Intelligence Fall 2017 Instructor: Prof. Haym Hirsh Lecture 7 Extra Credit Opportunity: Lecture Today 4:15pm Gates G01 Learning to See Without a Teacher Phillip Isola
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
Finding a Path. Advanced Pathfinding. Finding a Path. A* Pathfinding Search. Practical Path Planning 3/21/2016. Tile-Based Navigation Graphs IMGD 4000
 3/21/2016 Finding a Path Often seems obvious and natural in real life e.g., Get from point A to B go around lake Advanced Pathfinding http://www.rocket5studios.com/tutorials/make-a-2d-game-withunity3d-using-only-free-tools-beginning-enemy-ai-with-a-pathfinding/
3/21/2016 Finding a Path Often seems obvious and natural in real life e.g., Get from point A to B go around lake Advanced Pathfinding http://www.rocket5studios.com/tutorials/make-a-2d-game-withunity3d-using-only-free-tools-beginning-enemy-ai-with-a-pathfinding/
521495A: Artificial Intelligence
 521495A: Artificial Intelligence Search Lectured by Abdenour Hadid Associate Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Agent An agent is an entity that perceives the
521495A: Artificial Intelligence Search Lectured by Abdenour Hadid Associate Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Agent An agent is an entity that perceives the
A* optimality proof, cycle checking
 A* optimality proof, cycle checking CPSC 322 Search 5 Textbook 3.6 and 3.7.1 January 21, 2011 Taught by Mike Chiang Lecture Overview Recap Admissibility of A* Cycle checking and multiple path pruning Slide
A* optimality proof, cycle checking CPSC 322 Search 5 Textbook 3.6 and 3.7.1 January 21, 2011 Taught by Mike Chiang Lecture Overview Recap Admissibility of A* Cycle checking and multiple path pruning Slide
Formations in flow fields
 Formations in flow fields Rick van Meer June 11, 2015 1 Introduction Pathfinding and formations (i.e. an arrangement of agents) are both a part of artificial intelligence and can be used in games. However,
Formations in flow fields Rick van Meer June 11, 2015 1 Introduction Pathfinding and formations (i.e. an arrangement of agents) are both a part of artificial intelligence and can be used in games. However,
Search: Advanced Topics and Conclusion
 Search: Advanced Topics and Conclusion CPSC 322 Lecture 8 January 20, 2006 Textbook 2.6 Search: Advanced Topics and Conclusion CPSC 322 Lecture 8, Slide 1 Lecture Overview Recap Branch & Bound A Tricks
Search: Advanced Topics and Conclusion CPSC 322 Lecture 8 January 20, 2006 Textbook 2.6 Search: Advanced Topics and Conclusion CPSC 322 Lecture 8, Slide 1 Lecture Overview Recap Branch & Bound A Tricks
Graphs, Search, Pathfinding (behavior involving where to go) Steering, Flocking, Formations (behavior involving how to go)
 Steering, Flocking, Formations (behavior involving how to go)") Graphs, Search, Pathfinding (behavior involving where to go) Steering, Flocking, Formations (behavior involving how to go) Class N-2 1. What are some benefits of path networks? 2. Cons of path networks?
Graphs, Search, Pathfinding (behavior involving where to go) Steering, Flocking, Formations (behavior involving how to go) Class N-2 1. What are some benefits of path networks? 2. Cons of path networks?
Announcements. CS 188: Artificial Intelligence
 Announcements Projects: Looking for project partners? --- Come to front after lecture. Try pair programming, not divide-and-conquer Account forms available up front during break and after lecture Assignments
Announcements Projects: Looking for project partners? --- Come to front after lecture. Try pair programming, not divide-and-conquer Account forms available up front during break and after lecture Assignments
Pathfinding Algorithms and Implementations on Grid Map
 Pathfinding Algorithms and Implementations on Grid Map Steven Andrew / 13509061 Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung, Jl. Ganesha 10 Bandung
Pathfinding Algorithms and Implementations on Grid Map Steven Andrew / 13509061 Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung, Jl. Ganesha 10 Bandung
CS 387/680: GAME AI PATHFINDING
 CS 387/680: GAME AI PATHFINDING 4/14/2014 Instructor: Santiago Ontañón santi@cs.drexel.edu TA: Alberto Uriarte office hours: Tuesday 4-6pm, Cyber Learning Center Class website: https://www.cs.drexel.edu/~santi/teaching/2014/cs387-680/intro.html
CS 387/680: GAME AI PATHFINDING 4/14/2014 Instructor: Santiago Ontañón santi@cs.drexel.edu TA: Alberto Uriarte office hours: Tuesday 4-6pm, Cyber Learning Center Class website: https://www.cs.drexel.edu/~santi/teaching/2014/cs387-680/intro.html
Introduction to Computer Science and Programming for Astronomers
 Introduction to Computer Science and Programming for Astronomers Lecture 9. István Szapudi Institute for Astronomy University of Hawaii March 21, 2018 Outline Reminder 1 Reminder 2 3 Reminder We have demonstrated
Introduction to Computer Science and Programming for Astronomers Lecture 9. István Szapudi Institute for Astronomy University of Hawaii March 21, 2018 Outline Reminder 1 Reminder 2 3 Reminder We have demonstrated
Searching. Assume goal- or utilitybased. Next task to achieve is to determine the best path to the goal
 Searching Assume goal- or utilitybased agents: state information ability to perform actions goals to achieve Next task to achieve is to determine the best path to the goal CSC384 Lecture Slides Steve Engels,
Searching Assume goal- or utilitybased agents: state information ability to perform actions goals to achieve Next task to achieve is to determine the best path to the goal CSC384 Lecture Slides Steve Engels,
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Search Algorithms Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Today Agents that Plan Ahead Search Problems
CS 5522: Artificial Intelligence II Search Algorithms Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Today Agents that Plan Ahead Search Problems
Problem Solving & Heuristic Search
 190.08 Artificial 2016-Spring Problem Solving & Heuristic Search Byoung-Tak Zhang School of Computer Science and Engineering Seoul National University 190.08 Artificial (2016-Spring) http://www.cs.duke.edu/courses/fall08/cps270/
190.08 Artificial 2016-Spring Problem Solving & Heuristic Search Byoung-Tak Zhang School of Computer Science and Engineering Seoul National University 190.08 Artificial (2016-Spring) http://www.cs.duke.edu/courses/fall08/cps270/
Heuristic Search: A* CPSC 322 Search 4 January 19, Textbook 3.6 Taught by: Vasanth
 Heuristic Search: A* CPSC 322 Search 4 January 19, 2011 Textbook 3.6 Taught by: Vasanth 1 Lecture Overview Recap Search heuristics: admissibility and examples Recap of BestFS Heuristic search: A* 2 Example
Heuristic Search: A* CPSC 322 Search 4 January 19, 2011 Textbook 3.6 Taught by: Vasanth 1 Lecture Overview Recap Search heuristics: admissibility and examples Recap of BestFS Heuristic search: A* 2 Example
Pathfinding Decision Making
 DM810 Computer Game Programming II: AI Lecture 7 Pathfinding Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark Resume Best first search Dijkstra Greedy search
DM810 Computer Game Programming II: AI Lecture 7 Pathfinding Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark Resume Best first search Dijkstra Greedy search
Algorithms and Path Planning
 Algorithms and Path Planning Topics Simple Search Depth First Search Breadth First Search Dijkstra s Search Greedy Search A* Search Classes of interest ECE400: Computer Systems Programming CS4700: Foundations
Algorithms and Path Planning Topics Simple Search Depth First Search Breadth First Search Dijkstra s Search Greedy Search A* Search Classes of interest ECE400: Computer Systems Programming CS4700: Foundations
CS 4100 // artificial intelligence
 CS 4100 // artificial intelligence instructor: byron wallace Search I Attribution: many of these slides are modified versions of those distributed with the UC Berkeley CS188 materials Thanks to John DeNero
CS 4100 // artificial intelligence instructor: byron wallace Search I Attribution: many of these slides are modified versions of those distributed with the UC Berkeley CS188 materials Thanks to John DeNero
CS510 \ Lecture Ariel Stolerman
 CS510 \ Lecture02 2012-10-03 1 Ariel Stolerman Midterm Evan will email about that after the lecture, at least 2 lectures from now. The exam will be given in a regular PDF (not an online form). We will
CS510 \ Lecture02 2012-10-03 1 Ariel Stolerman Midterm Evan will email about that after the lecture, at least 2 lectures from now. The exam will be given in a regular PDF (not an online form). We will
the gamedesigninitiative at cornell university Lecture 20 Pathfinding
 Lecture 20 Take way for Today What are primary goals for pathfinding? Identify advantages/disadvantages of * In what situations does * fail (or look bad)? What can we do to fix se problems? Why combine
Lecture 20 Take way for Today What are primary goals for pathfinding? Identify advantages/disadvantages of * In what situations does * fail (or look bad)? What can we do to fix se problems? Why combine
Solving Problems by Searching. Artificial Intelligence Santa Clara University 2016
 Solving Problems by Searching Artificial Intelligence Santa Clara University 2016 Problem Solving Agents Problem Solving Agents Use atomic representation of states Planning agents Use factored or structured
Solving Problems by Searching Artificial Intelligence Santa Clara University 2016 Problem Solving Agents Problem Solving Agents Use atomic representation of states Planning agents Use factored or structured
CS 380: Artificial Intelligence Lecture #4
 CS 380: Artificial Intelligence Lecture #4 William Regli Material Chapter 4 Section 1-3 1 Outline Best-first search Greedy best-first search A * search Heuristics Local search algorithms Hill-climbing
CS 380: Artificial Intelligence Lecture #4 William Regli Material Chapter 4 Section 1-3 1 Outline Best-first search Greedy best-first search A * search Heuristics Local search algorithms Hill-climbing
DIT411/TIN175, Artificial Intelligence. Peter Ljunglöf. 19 January, 2018
 DIT411/TIN175, Artificial Intelligence Chapter 3: Classical search algorithms CHAPTER 3: CLASSICAL SEARCH ALGORITHMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 19 January, 2018 1 DEADLINE FOR
DIT411/TIN175, Artificial Intelligence Chapter 3: Classical search algorithms CHAPTER 3: CLASSICAL SEARCH ALGORITHMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 19 January, 2018 1 DEADLINE FOR
Informed Search Algorithms
 Informed Search Algorithms CITS3001 Algorithms, Agents and Artificial Intelligence Tim French School of Computer Science and Software Engineering The University of Western Australia 2017, Semester 2 Introduction
Informed Search Algorithms CITS3001 Algorithms, Agents and Artificial Intelligence Tim French School of Computer Science and Software Engineering The University of Western Australia 2017, Semester 2 Introduction
Pathfinding. Artificial Intelligence for gaming
 Pathfinding Artificial Intelligence for gaming Pathfinding Group AI Execution Management Strategy World Inter face Character AI Decision Making Movement Pathfinding Animation Physics Pathfinding Graphs
Pathfinding Artificial Intelligence for gaming Pathfinding Group AI Execution Management Strategy World Inter face Character AI Decision Making Movement Pathfinding Animation Physics Pathfinding Graphs
521495A: Artificial Intelligence
 521495A: Artificial Intelligence Informed Search Lectured by Abdenour Hadid Adjunct Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Today Informed Search Heuristics Greedy
521495A: Artificial Intelligence Informed Search Lectured by Abdenour Hadid Adjunct Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Today Informed Search Heuristics Greedy
Situational Awareness: Terrain Reasoning for Tactical Shooter A.I
 Situational Awareness: Terrain Reasoning for Tactical Shooter A.I Situational Awareness The capability of an A.I. agent to reason is limited by the data its sensor's can acquire about the world The representation
Situational Awareness: Terrain Reasoning for Tactical Shooter A.I Situational Awareness The capability of an A.I. agent to reason is limited by the data its sensor's can acquire about the world The representation
CS 188: Artificial Intelligence Fall Search Gone Wrong?
 CS 188: Artificial Intelligence Fall 2009 Lecture 3: A* Search 9/3/2009 Pieter Aeel UC Berkeley Many slides from Dan Klein Search Gone Wrong? 1 Announcements Assignments: Project 0 (Python tutorial): due
CS 188: Artificial Intelligence Fall 2009 Lecture 3: A* Search 9/3/2009 Pieter Aeel UC Berkeley Many slides from Dan Klein Search Gone Wrong? 1 Announcements Assignments: Project 0 (Python tutorial): due
Search. CS 3793/5233 Artificial Intelligence Search 1
 CS 3793/5233 Artificial Intelligence 1 Basics Basics State-Space Problem Directed Graphs Generic Algorithm Examples Uninformed is finding a sequence of actions that achieve a goal from an initial state.
CS 3793/5233 Artificial Intelligence 1 Basics Basics State-Space Problem Directed Graphs Generic Algorithm Examples Uninformed is finding a sequence of actions that achieve a goal from an initial state.
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Informed Search Prof. Scott Niekum University of Texas at Austin [These slides based on ones created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
CS 343: Artificial Intelligence Informed Search Prof. Scott Niekum University of Texas at Austin [These slides based on ones created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
CS 331: Artificial Intelligence Informed Search. Informed Search
 CS 331: Artificial Intelligence Informed Search 1 Informed Search How can we make search smarter? Use problem-specific knowledge beyond the definition of the problem itself Specifically, incorporate knowledge
CS 331: Artificial Intelligence Informed Search 1 Informed Search How can we make search smarter? Use problem-specific knowledge beyond the definition of the problem itself Specifically, incorporate knowledge
ARTIFICIAL INTELLIGENCE SOLVING PROBLEMS BY SEARCHING. Chapter 3
 ARTIFICIAL INTELLIGENCE SOLVING PROBLEMS BY SEARCHING Chapter 3 1 PROBLEM SOLVING We want: To automatically solve a problem We need: A representation of the problem Algorithms that use some strategy to
ARTIFICIAL INTELLIGENCE SOLVING PROBLEMS BY SEARCHING Chapter 3 1 PROBLEM SOLVING We want: To automatically solve a problem We need: A representation of the problem Algorithms that use some strategy to
Advanced A* Improvements
 Advanced A* Improvements 1 Iterative Deepening A* (IDA*) Idea: Reduce memory requirement of A* by applying cutoff on values of f Consistent heuristic function h Algorithm IDA*: 1. Initialize cutoff to
Advanced A* Improvements 1 Iterative Deepening A* (IDA*) Idea: Reduce memory requirement of A* by applying cutoff on values of f Consistent heuristic function h Algorithm IDA*: 1. Initialize cutoff to
6.034 Notes: Section 2.1
 6.034 Notes: Section 2.1 Slide 2.1.1 Search plays a key role in many parts of AI. These algorithms provide the conceptual backbone of almost every approach to the systematic exploration of alternatives.
6.034 Notes: Section 2.1 Slide 2.1.1 Search plays a key role in many parts of AI. These algorithms provide the conceptual backbone of almost every approach to the systematic exploration of alternatives.
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS
 Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Announcements. Project 0: Python Tutorial Due last night
 Announcements Project 0: Python Tutorial Due last night HW1 officially released today, but a few people have already started on it Due Monday 2/6 at 11:59 pm P1: Search not officially out, but some have
Announcements Project 0: Python Tutorial Due last night HW1 officially released today, but a few people have already started on it Due Monday 2/6 at 11:59 pm P1: Search not officially out, but some have
CS 331: Artificial Intelligence Informed Search. Informed Search
 CS 331: Artificial Intelligence Informed Search 1 Informed Search How can we make search smarter? Use problem-specific knowledge beyond the definition of the problem itself Specifically, incorporate knowledge
CS 331: Artificial Intelligence Informed Search 1 Informed Search How can we make search smarter? Use problem-specific knowledge beyond the definition of the problem itself Specifically, incorporate knowledge
CS 188: Artificial Intelligence. Recap Search I
 CS 188: Artificial Intelligence Review of Search, CSPs, Games DISCLAIMER: It is insufficient to simply study these slides, they are merely meant as a quick refresher of the high-level ideas covered. You
CS 188: Artificial Intelligence Review of Search, CSPs, Games DISCLAIMER: It is insufficient to simply study these slides, they are merely meant as a quick refresher of the high-level ideas covered. You
Search: Advanced Topics and Conclusion
 Search: Advanced Topics and Conclusion CPSC 322 Lecture 8 January 24, 2007 Textbook 2.6 Search: Advanced Topics and Conclusion CPSC 322 Lecture 8, Slide 1 Lecture Overview 1 Recap 2 Branch & Bound 3 A
Search: Advanced Topics and Conclusion CPSC 322 Lecture 8 January 24, 2007 Textbook 2.6 Search: Advanced Topics and Conclusion CPSC 322 Lecture 8, Slide 1 Lecture Overview 1 Recap 2 Branch & Bound 3 A
HW#1 due today. HW#2 due Monday, 9/09/13, in class Continue reading Chapter 3
 9-04-2013 Uninformed (blind) search algorithms Breadth-First Search (BFS) Uniform-Cost Search Depth-First Search (DFS) Depth-Limited Search Iterative Deepening Best-First Search HW#1 due today HW#2 due
9-04-2013 Uninformed (blind) search algorithms Breadth-First Search (BFS) Uniform-Cost Search Depth-First Search (DFS) Depth-Limited Search Iterative Deepening Best-First Search HW#1 due today HW#2 due
6.141: Robotics systems and science Lecture 10: Motion Planning III
 6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Navigation and Metric Path Planning
 Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Uninformed Search Methods
 Uninformed Search Methods Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy
Uninformed Search Methods Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy
Solving Problems by Searching
 INF5390 Kunstig intelligens Sony Vaio VPC-Z12 Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA
INF5390 Kunstig intelligens Sony Vaio VPC-Z12 Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA
Artificial Intelligence
 Artificial Intelligence Lesson 1 1 About Lecturer: Prof. Sarit Kraus TA: Galit Haim: haimga@cs.biu.ac.il (almost) All you need can be found on the course website: http://u.cs.biu.ac.il/~haimga/teaching/ai/
Artificial Intelligence Lesson 1 1 About Lecturer: Prof. Sarit Kraus TA: Galit Haim: haimga@cs.biu.ac.il (almost) All you need can be found on the course website: http://u.cs.biu.ac.il/~haimga/teaching/ai/
Efficient memory-bounded search methods
 Efficient memory-bounded search methods Mikhail Simin Arjang Fahim CSCE 580: Artificial Intelligence Fall 2011 Dr. Marco Voltorta Outline of The Presentation Motivations and Objectives Background - BFS
Efficient memory-bounded search methods Mikhail Simin Arjang Fahim CSCE 580: Artificial Intelligence Fall 2011 Dr. Marco Voltorta Outline of The Presentation Motivations and Objectives Background - BFS
Beyond A*: Speeding up pathfinding through hierarchical abstraction. Daniel Harabor NICTA & The Australian National University
 Beyond A*: Speeding up pathfinding through hierarchical abstraction Daniel Harabor NICTA & The Australian National University Motivation Myth: Pathfinding is a solved problem. Motivation Myth: Pathfinding
Beyond A*: Speeding up pathfinding through hierarchical abstraction Daniel Harabor NICTA & The Australian National University Motivation Myth: Pathfinding is a solved problem. Motivation Myth: Pathfinding
Outline. Best-first search
 Outline Best-first search Greedy best-first search A* search Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing search Genetic algorithms Constraint Satisfaction Problems
Outline Best-first search Greedy best-first search A* search Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing search Genetic algorithms Constraint Satisfaction Problems
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics,
 Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
CSC 2114: Artificial Intelligence Search
 CSC 2114: Artificial Intelligence Search Ernest Mwebaze emwebaze@cit.ac.ug Office: Block A : 3 rd Floor [Slide Credit Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. Reference materials
CSC 2114: Artificial Intelligence Search Ernest Mwebaze emwebaze@cit.ac.ug Office: Block A : 3 rd Floor [Slide Credit Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. Reference materials
INTRODUCTION TO HEURISTIC SEARCH
 INTRODUCTION TO HEURISTIC SEARCH What is heuristic search? Given a problem in which we must make a series of decisions, determine the sequence of decisions which provably optimizes some criterion. What
INTRODUCTION TO HEURISTIC SEARCH What is heuristic search? Given a problem in which we must make a series of decisions, determine the sequence of decisions which provably optimizes some criterion. What
Search : Lecture 2. September 9, 2003
 Search 6.825: Lecture 2 September 9, 2003 1 Problem-Solving Problems When your environment can be effectively modeled as having discrete states and actions deterministic, known world dynamics known initial
Search 6.825: Lecture 2 September 9, 2003 1 Problem-Solving Problems When your environment can be effectively modeled as having discrete states and actions deterministic, known world dynamics known initial
Artificial Intelligence
 Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Overview. Path Cost Function. Real Life Problems. COMP219: Artificial Intelligence. Lecture 10: Heuristic Search
 COMP219: Artificial Intelligence Lecture 10: Heuristic Search Overview Last time Depth-limited, iterative deepening and bi-directional search Avoiding repeated states Today Show how applying knowledge
COMP219: Artificial Intelligence Lecture 10: Heuristic Search Overview Last time Depth-limited, iterative deepening and bi-directional search Avoiding repeated states Today Show how applying knowledge
Potential Midterm Exam Questions
 Potential Midterm Exam Questions 1. What are the four ways in which AI is usually viewed? Which of the four is the preferred view of the authors of our textbook? 2. What does each of the lettered items
Potential Midterm Exam Questions 1. What are the four ways in which AI is usually viewed? Which of the four is the preferred view of the authors of our textbook? 2. What does each of the lettered items
DFS. Depth-limited Search
 DFS Completeness? No, fails in infinite depth spaces or spaces with loops Yes, assuming state space finite. Time complexity? O(b m ), terrible if m is much bigger than d. can do well if lots of goals Space
DFS Completeness? No, fails in infinite depth spaces or spaces with loops Yes, assuming state space finite. Time complexity? O(b m ), terrible if m is much bigger than d. can do well if lots of goals Space
Solving Problems by Searching
 INF5390 Kunstig intelligens Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA Chapter 3: Solving
INF5390 Kunstig intelligens Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA Chapter 3: Solving
CS 354R: Computer Game Technology
 CS 354R: Computer Game Technology A* Heuristics Fall 2018 A* Search f(n): The current best estimate for the best path through a node: f(n)=g(n)+h(n) g(n): current known best cost for getting to a node
CS 354R: Computer Game Technology A* Heuristics Fall 2018 A* Search f(n): The current best estimate for the best path through a node: f(n)=g(n)+h(n) g(n): current known best cost for getting to a node
Uninformed Search. Reading: Chapter 4 (Tuesday, 2/5) HW#1 due next Tuesday
 HW#1 due next Tuesday") Uninformed Search Reading: Chapter 4 (Tuesday, 2/5) HW#1 due next Tuesday 1 Uninformed Search through the space of possible solutions Use no knowledge about which path is likely to be best Exception: uniform
Uninformed Search Reading: Chapter 4 (Tuesday, 2/5) HW#1 due next Tuesday 1 Uninformed Search through the space of possible solutions Use no knowledge about which path is likely to be best Exception: uniform
Basic Search Algorithms
 Basic Search Algorithms Tsan-sheng Hsu tshsu@iis.sinica.edu.tw http://www.iis.sinica.edu.tw/~tshsu 1 Abstract The complexities of various search algorithms are considered in terms of time, space, and cost
Basic Search Algorithms Tsan-sheng Hsu tshsu@iis.sinica.edu.tw http://www.iis.sinica.edu.tw/~tshsu 1 Abstract The complexities of various search algorithms are considered in terms of time, space, and cost
CMPUT 396 Sliding Tile Puzzle
 CMPUT 396 Sliding Tile Puzzle Sliding Tile Puzzle 2x2 Sliding Tile States Exactly half of the states are solvable, the other half are not. In the case of 2x2 puzzles, I can solve it if I start with a configuration
CMPUT 396 Sliding Tile Puzzle Sliding Tile Puzzle 2x2 Sliding Tile States Exactly half of the states are solvable, the other half are not. In the case of 2x2 puzzles, I can solve it if I start with a configuration
Informed Search Methods
 Informed Search Methods How can we improve searching strategy by using intelligence? Map example: Heuristic: Expand those nodes closest in as the crow flies distance to goal 8-puzzle: Heuristic: Expand
Informed Search Methods How can we improve searching strategy by using intelligence? Map example: Heuristic: Expand those nodes closest in as the crow flies distance to goal 8-puzzle: Heuristic: Expand
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
Searching with Partial Information
 Searching with Partial Information Above we (unrealistically) assumed that the environment is fully observable and deterministic Moreover, we assumed that the agent knows what the effects of each action
Searching with Partial Information Above we (unrealistically) assumed that the environment is fully observable and deterministic Moreover, we assumed that the agent knows what the effects of each action