521495A: Artificial Intelligence
|
|
|
- Meagan Garrett
- 5 years ago
- Views:
Transcription
1 521495A: Artificial Intelligence Search Lectured by Abdenour Hadid Associate Professor, CMVS, University of Oulu Slides adopted from
2 Agent An agent is an entity that perceives the environments and acts to maximize its (expected) utility The goal of the course is to learn how to design rational agents Sensors? Actuators Percepts Actions Environment
3 Agent An agent is an entity that perceives the environments and acts to maximize its (expected) utility The goal of the course is to learn how to design rational agents Sensors? Actuators Percepts Actions Environment

4 Agent An agent is an entity that perceives the environments and acts to maximize its (expected) utility The goal of the course is to learn how to design rational agents Sensors? Actuators Percepts Actions Environment
5 Agent An agent is an entity that perceives the environments and acts to maximize its (expected) utility The goal of the course is to learn how to design rational agents Sensors? Actuators Percepts Actions Environment
6
7 Search Agent function can be presented by tabulating all combinations of percepts and related actions? For most of the cases, this table would be huge or perhaps infinite and hence impractical.
8 Search For any given class of environments and tasks, we seek the agent (or class of agents) with the best performance Computational limitations make perfect rationality unachievable
9 For any given class of environments and tasks, we seek the agent with the best performance
10 Search
11 # Environment types Observable: Determines if the agents sensors give access to the complete state of the environment at each point in time. In such case the environment is fully observable. Fully observable environments are convenient, since the agent does not need memory to keep track of the changes in environment. Unfortunately, such environments are rare in practice. In other cases, environments are called partially observable or nonbservable. Deterministic: If the next state of the environment is completely determined by the current state and the action performed by the agent, then it is called deterministic; otherwise it is stochastic. Most real world environments are unfortunately stochastic. Static: A static environment is not changing while the agent is deliberating (e.g. many board games). If this is not true (e.g. driving a car), the environment is called dynamic. Discrete: Discrete/continuous distinction applies to the way time is handled and to the percepts and actions of the agent. For instance, chess game has a finite number of distinct states, percepts and actions. Hence it is discrete environment. On the other hand, taxi driving is continuous-state and continuos-time problem. Single-agent: This feature determines if the agent is acting alone in the environment, or if there are multiple agents (called as multi-agent environment). E.g. crossword puzzle is a single agent environment. The environment type largely determines the agent design

12 # Environment types Observable: Determines if the agents sensors give access to the complete state of the environment at each point in time. In such case the environment is fully observable. Fully observable environments are convenient, since the agent does not need memory to keep track of the changes in environment. Unfortunately, such environments are rare in practice. In other cases, environments are called partially observable or nonbservable.
13 # Environment types Deterministic: If the next state of the environment is completely determined by the current state and the action performed by the agent, then it is called deterministic; otherwise it is stochastic. Most real world environments are unfortunately stochastic.

14 # Environment types Static: A static environment is not changing while the agent is deliberating (e.g. many board games). If this is not true (e.g. driving a car), the environment is called dynamic. Discrete: Discrete/continuous distinction applies to the way time is handled and to the percepts and actions of the agent. For instance, chess game has a finite number of distinct states, percepts and actions. Hence it is discrete environment. On the other hand, taxi driving is continuous-state and continuos-time problem.
. E.g. crossword puzzle is a single agent environment.")
15 # Environment types Single-agent: This feature determines if the agent is acting alone in the environment, or if there are multiple agents (called as multi-agent environment). E.g. crossword puzzle is a single agent environment. The environment type largely determines the agent design
16 Reflex Agents Reflex agent is the most simple agent design. Choose action based on current percept (and maybe memory) May have memory or a model of the world s current state Do not consider the future consequences of their actions Consider how the world IS Can a reflex agent be rational?
 May have")

17 Reflex Agents Reflex agent is the most simple agent design. Choose action based on current percept (and maybe memory) May have memory or a model of the world s current state Do not consider the future consequences of their actions Consider how the world IS Can a reflex agent be rational?
18 Video of Demo Reflex Optimal

19 Video of Demo Reflex Odd
20 Agents that Plan
 Consider how the world WOULD")
21 Agents that Plan Ask what if Decisions based on (hypothesized) consequences of actions Must have a model of how the world evolves in response to actions Must formulate a goal (test) Consider how the world WOULD BE
22 Agents that Plan

23 Agents that learns In addition to planning: An agent can adapt its behavior during the operation based on the external performance standard. The agent is observing how well it is doing and adapts its decision making process.
24 Agents that learn?

25 Problem Solving Agents via Search


 which transforms the start")
26 Search Problems A search problem consists of: A state space A successor function (with actions, costs) A start state and a goal test N, 1.0 E, 1.0 A solution is a sequence of actions (a plan) which transforms the start state to a goal state

27 Search Problems Are Models
28 Example: Traveling in Romania State space: Cities Successor function: Roads: Go to adjacent city Cost = distance Start state: Arad Goal test: Is state == Bucharest? Solution? Sequence of cities, e.g., Arad, Sibiu, Fagaras, Bucharest
")
29 What s in a State Space? The world state includes every last detail of the environment A search state keeps only the details needed for planning (abstraction) Problem: Pathing States: (x,y) location Actions: NSEW Successor: update location only Goal test: is (x,y)=end
30 What s in a State Space? The world state includes every last detail of the environment A search state keeps only the details needed for planning (abstraction) Problem: Eat-All-Dots States: {(x,y), dot booleans} Actions: NSEW Successor: update location and possibly a dot boolean Goal test: dots all false

31 State Space Sizes? World state: Agent positions: 120 Food count: 30 Ghost positions: 12 Agent facing: NSEW How many World states? 120x(2 30 )x(12 2 )x4 States for pathing? 120 States for eat-all-dots? 120x(2 30 )



32 Search Trees This is now / start N, 1.0 E, 1.0 Possible futures A search tree: A what if tree of plans and their outcomes The start state is the root node Children correspond to successors Nodes show states, but correspond to PLANS that achieve those states For most problems, we can never actually build the whole tree
33 Tree Search
34 Search Example: Romania
35 General Tree Search The simplest approach to problem solving using search algorithms is a tree search. Basic idea: offline, simulated exploration of state space by generating successors of already-explored states (a.k.a. expanding states)
36 Searching with a Search Tree Search: Expand out potential plans (tree nodes) Maintain a fringe of partial plans under consideration Try to expand as few tree nodes as possible
37 General Tree Search The simplest approach to problem solving using search algorithms is a tree search. Important ideas: Fringe Expansion Exploration strategy Main question: which fringe nodes to explore? Strategy!!
38 Search Strategies The efficiency of the search algorithm is dictated by the strategy. A strategy is defined by picking the order of node expansion. Strategies are evaluated along the following dimensions: Completeness does it always find a solution if one exists? Time complexity number of nodes generated/expanded Space complexity maximum number of nodes in memory Optimality does it always find a least-cost solution?
39 Uninformed search strategies Uninformed (blind) strategies use only the information available in the problem definition. Uninformed Search Methods: Depth-First Search Breadth-First Search Uniform-Cost Search

40 Uninformed (blind) vs. Informed Search
41 Uninformed (blind) vs. Informed Search
42 General Tree Search The simplest approach to problem solving using search algorithms is a tree search. Basic idea: offline, simulated exploration of state space by generating successors of already-explored states (a.k.a. expanding states)
43 S a b d p a c e p h f r q q c G a q e p h f r q q c G a S G d b p q c e h a f r q p h f d b a c e r General Tree Search Fringe
44 Uninformed search strategies b c 1 c 2 b b c 3 Uniform-Cost Search Breadth-First Search Depth-First Search
45 Search Algorithm Properties Complete: Guaranteed to find a solution if one exists Optimal: Guaranteed to find the least cost path Time complexity Space complexity b 1 node b nodes Cartoon of search tree: b is the branching factor m is the maximum depth solutions at various depths Number of nodes in entire tree 1 + b + b 2 +. b m = O(b m ) m tiers b 2 nodes b m nodes
46 Depth-First Search
47 Depth-First Search S a b d p a c e p h f r q q c G a q e p h f r q q c G a S G d b p q c e h a f r q p h f d b a c e r Strategy: expand a deepest node first Implementation: Fringe is a LIFO stack i.e., put successors at front
48 Depth-First Search (DFS) Properties What nodes DFS expand? Some left prefix of the tree. Could process the whole tree! If m is finite, takes time O(b m ) b 1 node b nodes b 2 nodes How much space does the fringe take? Only has siblings on path to root, so O(bm) Linear space m tiers Is it complete? No: fails in infinite-depth spaces!! Yes, in finite space Is it optimal? No, it finds the leftmost solution, regardless of depth or cost b m nodes Note that most cases (like Romania example) have infinite depth (in Romania example you can travel a circle).
49 Breadth-First Search
50 Breadth-First Search Strategy: expand a shallowest node first Implementation: Fringe is a FIFO queue (i.e., new successors go at end) S b p a d q c h e r f G S Search Tiers b a d c a h e r p h q e r f p q p q f q c G q c G a a
51 Breadth-First Search (BFS) Properties What nodes does BFS expand? Processes all nodes above shallowest solution Let depth of shallowest solution be s Search takes time O(b s ) s tiers b 1 node b nodes b 2 nodes How much space does the fringe take? b s nodes Keeps all nodes in memory, so O(b s ) Is it complete? b m nodes s must be finite if a solution exists, so yes! Is it optimal? Yes (if cost = 1 per step); not optimal in general Space is the big problem; can easily generate nodes at 100MB/sec, so 24hrs = 8640GB.
52 Iterative Deepening Idea: get DFS s space advantage with BFS s time / shallow-solution advantages Run a DFS with depth limit 1. If no solution Run a DFS with depth limit 2. If no solution Run a DFS with depth limit 3... b Isn t that wastefully redundant? Generally most work happens in the lowest level searched, so not so bad!
53 Cost-Sensitive Search b a d 2 c e GOAL 2 f START 1 p 4 15 q 4 h r 2 BFS finds the shortest path in terms of number of actions. It does not find the least-cost path. We will now cover a similar algorithm which does find the least-cost path.
54 Uniform Cost Search
55 Uniform Cost Search Strategy: expand a cheapest node first (least-cost unexpanded node) Fringe = queue ordered by path cost, lowest first 2 b 1 3 S 1 p a d q 2 c h e 8 2 r G 2 f 1 (e.g. continue exploration from city that is closest to Arad). S 0 d 3 e 9 p 1 Cost contours b a 4 6 c a 11 h p e 13 q 5 r f 7 8 h p 17 r 11 q f q c G q 16 q 11 c G 10 a a
56 Uniform Cost Search (UCS) Properties What nodes does UCS expand? Processes all nodes with cost less than cheapest solution! If that solution costs C* and arcs cost at least, then the effective depth is roughly C*/ Takes time O(b C*/ ) (exponential in effective depth) C*/ tiers b c 1 c 2 c 3 How much space does the fringe take? Has roughly the last tier, so O(b C*/ ) Is it complete? Assuming best solution has a finite cost and minimum arc cost is positive, yes! Is it optimal? Yes
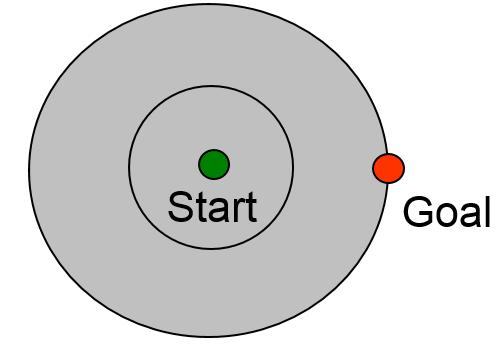
57 Uniform Cost Issues Remember: UCS explores increasing cost contours The good: UCS is complete and optimal! c 1 c 2 c 3 The bad: Explores options in every direction No information about goal location Start Goal We ll fix that soon!

58 Search and Models Search operates over models of the world The agent doesn t actually try all the plans out in the real world! Planning is all in simulation Your search is only as good as your models
59
CSC 2114: Artificial Intelligence Search
 CSC 2114: Artificial Intelligence Search Ernest Mwebaze emwebaze@cit.ac.ug Office: Block A : 3 rd Floor [Slide Credit Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. Reference materials
CSC 2114: Artificial Intelligence Search Ernest Mwebaze emwebaze@cit.ac.ug Office: Block A : 3 rd Floor [Slide Credit Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. Reference materials
Announcements. Project 0: Python Tutorial Due last night
 Announcements Project 0: Python Tutorial Due last night HW1 officially released today, but a few people have already started on it Due Monday 2/6 at 11:59 pm P1: Search not officially out, but some have
Announcements Project 0: Python Tutorial Due last night HW1 officially released today, but a few people have already started on it Due Monday 2/6 at 11:59 pm P1: Search not officially out, but some have
CS 4100 // artificial intelligence
 CS 4100 // artificial intelligence instructor: byron wallace Search I Attribution: many of these slides are modified versions of those distributed with the UC Berkeley CS188 materials Thanks to John DeNero
CS 4100 // artificial intelligence instructor: byron wallace Search I Attribution: many of these slides are modified versions of those distributed with the UC Berkeley CS188 materials Thanks to John DeNero
PEAS: Medical diagnosis system
 PEAS: Medical diagnosis system Performance measure Patient health, cost, reputation Environment Patients, medical staff, insurers, courts Actuators Screen display, email Sensors Keyboard/mouse Environment
PEAS: Medical diagnosis system Performance measure Patient health, cost, reputation Environment Patients, medical staff, insurers, courts Actuators Screen display, email Sensors Keyboard/mouse Environment
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Search Algorithms Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Today Agents that Plan Ahead Search Problems
CS 5522: Artificial Intelligence II Search Algorithms Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Today Agents that Plan Ahead Search Problems
CS 188: Ar)ficial Intelligence
ficial Intelligence") CS 188: Ar)ficial Intelligence Search Instructors: Pieter Abbeel & Anca Dragan University of California, Berkeley [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley
CS 188: Ar)ficial Intelligence Search Instructors: Pieter Abbeel & Anca Dragan University of California, Berkeley [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley
CSE 473: Ar+ficial Intelligence
 CSE 473: Ar+ficial Intelligence Search Instructor: Luke Ze=lemoyer University of Washington [These slides were adapted from Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CSE 473: Ar+ficial Intelligence Search Instructor: Luke Ze=lemoyer University of Washington [These slides were adapted from Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
Warm- up. IteraAve version, not recursive. class TreeNode TreeNode[] children() boolean isgoal() DFS(TreeNode start)
![Warm- up. IteraAve version, not recursive. class TreeNode TreeNode[] children() boolean isgoal() DFS(TreeNode start)](/thumbs/79/79004084.jpg "Warm- up. IteraAve version, not recursive. class TreeNode TreeNode[] children() boolean isgoal() DFS(TreeNode start)") Warm- up We ll o-en have a warm- up exercise for the 10 minutes before class starts. Here s the first one Write the pseudo code for breadth first search and depth first search IteraAve version, not recursive
Warm- up We ll o-en have a warm- up exercise for the 10 minutes before class starts. Here s the first one Write the pseudo code for breadth first search and depth first search IteraAve version, not recursive
521495A: Artificial Intelligence
 521495A: Artificial Intelligence Informed Search Lectured by Abdenour Hadid Adjunct Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Today Informed Search Heuristics Greedy
521495A: Artificial Intelligence Informed Search Lectured by Abdenour Hadid Adjunct Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Today Informed Search Heuristics Greedy
Graph Search. Chris Amato Northeastern University. Some images and slides are used from: Rob Platt, CS188 UC Berkeley, AIMA
 Graph Search Chris Amato Northeastern University Some images and slides are used from: Rob Platt, CS188 UC Berkeley, AIMA What is graph search? Start state Goal state Graph search: find a path from start
Graph Search Chris Amato Northeastern University Some images and slides are used from: Rob Platt, CS188 UC Berkeley, AIMA What is graph search? Start state Goal state Graph search: find a path from start
ARTIFICIAL INTELLIGENCE SOLVING PROBLEMS BY SEARCHING. Chapter 3
 ARTIFICIAL INTELLIGENCE SOLVING PROBLEMS BY SEARCHING Chapter 3 1 PROBLEM SOLVING We want: To automatically solve a problem We need: A representation of the problem Algorithms that use some strategy to
ARTIFICIAL INTELLIGENCE SOLVING PROBLEMS BY SEARCHING Chapter 3 1 PROBLEM SOLVING We want: To automatically solve a problem We need: A representation of the problem Algorithms that use some strategy to
ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING
 LECTURES 2 AND 3: PROBLEM SOLVING") ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING BY SEARCH Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Problem solving by searching Problem formulation Example problems Search
ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING BY SEARCH Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Problem solving by searching Problem formulation Example problems Search
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 Problem formulation & examples Basic search algorithms Outline Chapter 3 2 On holiday in Romania; currently in Arad. Flight leaves tomorrow from Bucharest
Problem solving and search Chapter 3 Chapter 3 1 Problem formulation & examples Basic search algorithms Outline Chapter 3 2 On holiday in Romania; currently in Arad. Flight leaves tomorrow from Bucharest
CS 4700: Foundations of Artificial Intelligence. Bart Selman. Search Techniques R&N: Chapter 3
 CS 4700: Foundations of Artificial Intelligence Bart Selman Search Techniques R&N: Chapter 3 Outline Search: tree search and graph search Uninformed search: very briefly (covered before in other prerequisite
CS 4700: Foundations of Artificial Intelligence Bart Selman Search Techniques R&N: Chapter 3 Outline Search: tree search and graph search Uninformed search: very briefly (covered before in other prerequisite
CS 771 Artificial Intelligence. Problem Solving by Searching Uninformed search
 CS 771 Artificial Intelligence Problem Solving by Searching Uninformed search Complete architectures for intelligence? Search? Solve the problem of what to do. Learning? Learn what to do. Logic and inference?
CS 771 Artificial Intelligence Problem Solving by Searching Uninformed search Complete architectures for intelligence? Search? Solve the problem of what to do. Learning? Learn what to do. Logic and inference?
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics,
 Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
KI-Programmierung. Basic Search Algorithms
 KI-Programmierung Basic Search Algorithms Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2007/2008 B. Beckert: KI-Programmierung p.1 Example: Travelling in Romania Scenario On holiday in Romania;
KI-Programmierung Basic Search Algorithms Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2007/2008 B. Beckert: KI-Programmierung p.1 Example: Travelling in Romania Scenario On holiday in Romania;
Artificial Intelligence
 Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
AGENTS AND ENVIRONMENTS. What is AI in reality?
 AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
Solving Problems by Searching
 Solving Problems by Searching Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 1 Introduction Problem-Solving Agents vs. Reflex Agents Problem-solving
Solving Problems by Searching Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 1 Introduction Problem-Solving Agents vs. Reflex Agents Problem-solving
ARTIFICIAL INTELLIGENCE. Pathfinding and search
 INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Pathfinding and search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Pathfinding and search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
ITCS 6150 Intelligent Systems. Lecture 3 Uninformed Searches
 ITCS 6150 Intelligent Systems Lecture 3 Uninformed Searches Outline Problem Solving Agents Restricted form of general agent Problem Types Fully vs. partially observable, deterministic vs. stochastic Problem
ITCS 6150 Intelligent Systems Lecture 3 Uninformed Searches Outline Problem Solving Agents Restricted form of general agent Problem Types Fully vs. partially observable, deterministic vs. stochastic Problem
Basic Search. Fall Xin Yao. Artificial Intelligence: Basic Search
 Basic Search Xin Yao Fall 2017 Fall 2017 Artificial Intelligence: Basic Search Xin Yao Outline Motivating Examples Problem Formulation From Searching to Search Tree Uninformed Search Methods Breadth-first
Basic Search Xin Yao Fall 2017 Fall 2017 Artificial Intelligence: Basic Search Xin Yao Outline Motivating Examples Problem Formulation From Searching to Search Tree Uninformed Search Methods Breadth-first
Solving problems by searching
 Solving problems by searching 1 C H A P T E R 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Outline 2 Problem-solving agents 3 Note: this is offline
Solving problems by searching 1 C H A P T E R 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Outline 2 Problem-solving agents 3 Note: this is offline
CS 380: Artificial Intelligence Lecture #3
 CS 380: Artificial Intelligence Lecture #3 William Regli Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 1 Problem-solving agents Example: Romania
CS 380: Artificial Intelligence Lecture #3 William Regli Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 1 Problem-solving agents Example: Romania
Solving problems by searching
 Solving problems by searching Chapter 3 Systems 1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 2 Problem-solving agents Systems 3 Example:
Solving problems by searching Chapter 3 Systems 1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 2 Problem-solving agents Systems 3 Example:
Problem Solving and Search
 Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Artificial Intelligence Problem Solving and Uninformed Search
 Artificial Intelligence Problem Solving and Uninformed Search Maurizio Martelli, Viviana Mascardi {martelli, mascardi}@disi.unige.it University of Genoa Department of Computer and Information Science AI,
Artificial Intelligence Problem Solving and Uninformed Search Maurizio Martelli, Viviana Mascardi {martelli, mascardi}@disi.unige.it University of Genoa Department of Computer and Information Science AI,
Multiagent Systems Problem Solving and Uninformed Search
 Multiagent Systems Problem Solving and Uninformed Search Viviana Mascardi viviana.mascardi@unige.it MAS, University of Genoa, DIBRIS Classical AI 1 / 36 Disclaimer This presentation may contain material
Multiagent Systems Problem Solving and Uninformed Search Viviana Mascardi viviana.mascardi@unige.it MAS, University of Genoa, DIBRIS Classical AI 1 / 36 Disclaimer This presentation may contain material
Solving problems by searching
 Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
AGENTS AND ENVIRONMENTS. What is AI in reality?
 AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
Solving Problem by Searching. Chapter 3
 Solving Problem by Searching Chapter 3 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms blind search Heuristic search strategies Heuristic functions Problem-solving
Solving Problem by Searching Chapter 3 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms blind search Heuristic search strategies Heuristic functions Problem-solving
Chapter 2. Blind Search 8/19/2017
 Chapter 2 1 8/19/2017 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 8/19/2017 2 8/19/2017 3 On holiday in Romania; currently in Arad. Flight leaves tomorrow
Chapter 2 1 8/19/2017 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 8/19/2017 2 8/19/2017 3 On holiday in Romania; currently in Arad. Flight leaves tomorrow
CS 8520: Artificial Intelligence
 CS 8520: Artificial Intelligence Solving Problems by Searching Paula Matuszek Spring, 2013 Slides based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are in turn based on Russell, aima.eecs.berkeley.edu/slides-pdf.
CS 8520: Artificial Intelligence Solving Problems by Searching Paula Matuszek Spring, 2013 Slides based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are in turn based on Russell, aima.eecs.berkeley.edu/slides-pdf.
EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS
 EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS Lecture 3, 4/6/2005 University of Washington, Department of Electrical Engineering Spring 2005 Instructor: Professor Jeff A. Bilmes 4/6/2005 EE562 1 Today: Basic
EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS Lecture 3, 4/6/2005 University of Washington, Department of Electrical Engineering Spring 2005 Instructor: Professor Jeff A. Bilmes 4/6/2005 EE562 1 Today: Basic
Uninformed Search. Reading: Chapter 4 (Tuesday, 2/5) HW#1 due next Tuesday
 HW#1 due next Tuesday") Uninformed Search Reading: Chapter 4 (Tuesday, 2/5) HW#1 due next Tuesday 1 Uninformed Search through the space of possible solutions Use no knowledge about which path is likely to be best Exception: uniform
Uninformed Search Reading: Chapter 4 (Tuesday, 2/5) HW#1 due next Tuesday 1 Uninformed Search through the space of possible solutions Use no knowledge about which path is likely to be best Exception: uniform
Solving Problems: Blind Search
 Solving Problems: Blind Search Instructor: B. John Oommen Chancellor s Professor Fellow: IEEE ; Fellow: IAPR School of Computer Science, Carleton University, Canada The primary source of these notes are
Solving Problems: Blind Search Instructor: B. John Oommen Chancellor s Professor Fellow: IEEE ; Fellow: IAPR School of Computer Science, Carleton University, Canada The primary source of these notes are
Search EECS 395/495 Intro to Artificial Intelligence
 Search EECS 395/495 Intro to Artificial Intelligence Doug Downey (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for
Search EECS 395/495 Intro to Artificial Intelligence Doug Downey (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for
Search EECS 348 Intro to Artificial Intelligence
 Search EECS 348 Intro to Artificial Intelligence (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for systematically
Search EECS 348 Intro to Artificial Intelligence (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for systematically
Solving problems by searching
 Solving problems by searching Chapter 3 CS 2710 1 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms CS 2710 - Blind Search 2 1 Goal-based Agents Agents that take
Solving problems by searching Chapter 3 CS 2710 1 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms CS 2710 - Blind Search 2 1 Goal-based Agents Agents that take
Artificial Intelligence
 Artificial Intelligence CSC348 Unit 3: Problem Solving and Search Syedur Rahman Lecturer, CSE Department North South University syedur.rahman@wolfson.oxon.org Artificial Intelligence: Lecture Notes The
Artificial Intelligence CSC348 Unit 3: Problem Solving and Search Syedur Rahman Lecturer, CSE Department North South University syedur.rahman@wolfson.oxon.org Artificial Intelligence: Lecture Notes The
CAP 4630 Artificial Intelligence
 CAP 4630 Artificial Intelligence Instructor: Sam Ganzfried sganzfri@cis.fiu.edu 1 http://www.ultimateaiclass.com/ https://moodle.cis.fiu.edu/ 2 Solving problems by search 3 8-puzzle 4 8-queens 5 Search
CAP 4630 Artificial Intelligence Instructor: Sam Ganzfried sganzfri@cis.fiu.edu 1 http://www.ultimateaiclass.com/ https://moodle.cis.fiu.edu/ 2 Solving problems by search 3 8-puzzle 4 8-queens 5 Search
Outline. Solving problems by searching. Problem-solving agents. Example: Romania
 Outline Solving problems by searching Chapter 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 1 Systems 2 Problem-solving agents Example: Romania
Outline Solving problems by searching Chapter 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 1 Systems 2 Problem-solving agents Example: Romania
CS 188 Introduction to Artificial Intelligence Fall 2018 Note 1
 CS 188 Introduction to Artificial Intelligence Fall 2018 Note 1 These lecture notes are heavily based on notes originally written by Nikhil Sharma. Agents In artificial intelligence, the central problem
CS 188 Introduction to Artificial Intelligence Fall 2018 Note 1 These lecture notes are heavily based on notes originally written by Nikhil Sharma. Agents In artificial intelligence, the central problem
CS 188: Artificial Intelligence. Recap Search I
 CS 188: Artificial Intelligence Review of Search, CSPs, Games DISCLAIMER: It is insufficient to simply study these slides, they are merely meant as a quick refresher of the high-level ideas covered. You
CS 188: Artificial Intelligence Review of Search, CSPs, Games DISCLAIMER: It is insufficient to simply study these slides, they are merely meant as a quick refresher of the high-level ideas covered. You
AI: problem solving and search
 : problem solving and search Stefano De Luca Slides mainly by Tom Lenaerts Outline Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search with partial information
: problem solving and search Stefano De Luca Slides mainly by Tom Lenaerts Outline Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search with partial information
Uninformed Search. Problem-solving agents. Tree search algorithms. Single-State Problems
 Uninformed Search Problem-solving agents Tree search algorithms Single-State Problems Breadth-First Search Depth-First Search Limited-Depth Search Iterative Deepening Extensions Graph search algorithms
Uninformed Search Problem-solving agents Tree search algorithms Single-State Problems Breadth-First Search Depth-First Search Limited-Depth Search Iterative Deepening Extensions Graph search algorithms
Chapter 3 Solving problems by searching
 1 Chapter 3 Solving problems by searching CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Slides are mostly adapted from AIMA and MIT Open Courseware 2 Introduction Simple-reflex agents
1 Chapter 3 Solving problems by searching CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Slides are mostly adapted from AIMA and MIT Open Courseware 2 Introduction Simple-reflex agents
Set 2: State-spaces and Uninformed Search. ICS 271 Fall 2015 Kalev Kask
 Set 2: State-spaces and Uninformed Search ICS 271 Fall 2015 Kalev Kask You need to know State-space based problem formulation State space (graph) Search space Nodes vs. states Tree search vs graph search
Set 2: State-spaces and Uninformed Search ICS 271 Fall 2015 Kalev Kask You need to know State-space based problem formulation State space (graph) Search space Nodes vs. states Tree search vs graph search
Search I. slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig
 Search I slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig Problem-Solving Agents Intelligent agents can solve problems by searching a state-space State-space Model the agent s model of
Search I slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig Problem-Solving Agents Intelligent agents can solve problems by searching a state-space State-space Model the agent s model of
CS486/686 Lecture Slides (c) 2015 P.Poupart
 2015 P.Poupart") 1 2 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: May 7, 2015 3 Outline Problem solving agents and search Examples Properties of search algorithms
1 2 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: May 7, 2015 3 Outline Problem solving agents and search Examples Properties of search algorithms
CMU-Q Lecture 2: Search problems Uninformed search. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
Ar#ficial)Intelligence!!
Intelligence!!") Introduc*on! Ar#ficial)Intelligence!! Roman Barták Department of Theoretical Computer Science and Mathematical Logic Problem Solving: Uninformed Search Simple reflex agent only transfers the current percept
Introduc*on! Ar#ficial)Intelligence!! Roman Barták Department of Theoretical Computer Science and Mathematical Logic Problem Solving: Uninformed Search Simple reflex agent only transfers the current percept
Lecture 3. Uninformed Search
 Lecture 3 Uninformed Search 1 Uninformed search strategies Uninformed: While searching you have no clue whether one non-goal state is better than any other. Your search is blind. You don t know if your
Lecture 3 Uninformed Search 1 Uninformed search strategies Uninformed: While searching you have no clue whether one non-goal state is better than any other. Your search is blind. You don t know if your
COMP219: Artificial Intelligence. Lecture 7: Search Strategies
 COMP219: Artificial Intelligence Lecture 7: Search Strategies 1 Overview Last time basic ideas about problem solving; state space; solutions as paths; the notion of solution cost; the importance of using
COMP219: Artificial Intelligence Lecture 7: Search Strategies 1 Overview Last time basic ideas about problem solving; state space; solutions as paths; the notion of solution cost; the importance of using
CS486/686 Lecture Slides (c) 2014 P.Poupart
 2014 P.Poupart") 1 2 1 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: January 9, 2014 3 Outline Problem solving agents and search Examples Properties of search
1 2 1 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: January 9, 2014 3 Outline Problem solving agents and search Examples Properties of search
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems Uninformed search algorithms Informed search algorithms Chapter 3 2 Restricted
Problem solving and search Chapter 3 Chapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems Uninformed search algorithms Informed search algorithms Chapter 3 2 Restricted
HW#1 due today. HW#2 due Monday, 9/09/13, in class Continue reading Chapter 3
 9-04-2013 Uninformed (blind) search algorithms Breadth-First Search (BFS) Uniform-Cost Search Depth-First Search (DFS) Depth-Limited Search Iterative Deepening Best-First Search HW#1 due today HW#2 due
9-04-2013 Uninformed (blind) search algorithms Breadth-First Search (BFS) Uniform-Cost Search Depth-First Search (DFS) Depth-Limited Search Iterative Deepening Best-First Search HW#1 due today HW#2 due
Solving Problems by Searching
 Solving Problems by Searching CS486/686 University of Waterloo Sept 11, 2008 1 Outline Problem solving agents and search Examples Properties of search algorithms Uninformed search Breadth first Depth first
Solving Problems by Searching CS486/686 University of Waterloo Sept 11, 2008 1 Outline Problem solving agents and search Examples Properties of search algorithms Uninformed search Breadth first Depth first
Chapter 3: Solving Problems by Searching
 Chapter 3: Solving Problems by Searching Prepared by: Dr. Ziad Kobti 1 Problem-Solving Agent Reflex agent -> base its actions on a direct mapping from states to actions. Cannot operate well in large environments
Chapter 3: Solving Problems by Searching Prepared by: Dr. Ziad Kobti 1 Problem-Solving Agent Reflex agent -> base its actions on a direct mapping from states to actions. Cannot operate well in large environments
Uninformed search strategies (Section 3.4) Source: Fotolia
 Source: Fotolia") Uninformed search strategies (Section 3.4) Source: Fotolia Uninformed search strategies A search strategy is defined by picking the order of node expansion Uninformed search strategies use only the information
Uninformed search strategies (Section 3.4) Source: Fotolia Uninformed search strategies A search strategy is defined by picking the order of node expansion Uninformed search strategies use only the information
Week 3: Path Search. COMP9414/ 9814/ 3411: Artificial Intelligence. Motivation. Example: Romania. Romania Street Map. Russell & Norvig, Chapter 3.
 COMP9414/9814/3411 17s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence Week 3: Path Search Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions based only
COMP9414/9814/3411 17s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence Week 3: Path Search Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions based only
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 How to Solve a (Simple) Problem 7 2 4 1 2 5 6 3 4 5 8 3 1 6 7 8 Start State Goal State Chapter 3 2 Introduction Simple goal-based agents can solve problems
Problem solving and search Chapter 3 Chapter 3 1 How to Solve a (Simple) Problem 7 2 4 1 2 5 6 3 4 5 8 3 1 6 7 8 Start State Goal State Chapter 3 2 Introduction Simple goal-based agents can solve problems
S A E RC R H C I H NG N G IN N S T S A T T A E E G R G A R PH P S
 LECTURE 2 SEARCHING IN STATE GRAPHS Introduction Idea: Problem Solving as Search Basic formalism as State-Space Graph Graph explored by Tree Search Different algorithms to explore the graph Slides mainly
LECTURE 2 SEARCHING IN STATE GRAPHS Introduction Idea: Problem Solving as Search Basic formalism as State-Space Graph Graph explored by Tree Search Different algorithms to explore the graph Slides mainly
UNINFORMED SEARCH. What to do if teammates drop? Still have 3 or more? No problem keep going. Have two or fewer and want to be merged?
 UNINFORMED SEARCH EECS492 January 14, 2010 Administrative What to do if teammates drop? Still have 3 or more? No problem keep going. Have two or fewer and want to be merged? We ll do what we can. Submitting
UNINFORMED SEARCH EECS492 January 14, 2010 Administrative What to do if teammates drop? Still have 3 or more? No problem keep going. Have two or fewer and want to be merged? We ll do what we can. Submitting
CS 151: Intelligent Agents, Problem Formulation and Search
 CS 151: Intelligent Agents, Problem Formulation and Search How do we make a computer "smart?" Computer, clean the house! Um OK?? This one's got no chance How do we represent this problem? Hmmm where to
CS 151: Intelligent Agents, Problem Formulation and Search How do we make a computer "smart?" Computer, clean the house! Um OK?? This one's got no chance How do we represent this problem? Hmmm where to
Uninformed Search Methods
 Uninformed Search Methods Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy
Uninformed Search Methods Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy
CSCI 446: Artificial Intelligence
 CSCI 446: Artificil Intelligence Serch Instructor: Michele Vn Dyne [These slides were creted by Dn Klein nd Pieter Abbeel for CS188 Intro to AI t UC Berkeley. All CS188 mterils re vilble t http://i.berkeley.edu.]
CSCI 446: Artificil Intelligence Serch Instructor: Michele Vn Dyne [These slides were creted by Dn Klein nd Pieter Abbeel for CS188 Intro to AI t UC Berkeley. All CS188 mterils re vilble t http://i.berkeley.edu.]
Problem solving and search
 Problem solving and search Chapter 3 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu 1 /1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic
Problem solving and search Chapter 3 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu 1 /1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic
Lecture 4: Search 3. Victor R. Lesser. CMPSCI 683 Fall 2010
 Lecture 4: Search 3 Victor R. Lesser CMPSCI 683 Fall 2010 First Homework 1 st Programming Assignment 2 separate parts (homeworks) First part due on (9/27) at 5pm Second part due on 10/13 at 5pm Send homework
Lecture 4: Search 3 Victor R. Lesser CMPSCI 683 Fall 2010 First Homework 1 st Programming Assignment 2 separate parts (homeworks) First part due on (9/27) at 5pm Second part due on 10/13 at 5pm Send homework
Robot Programming with Lisp
 6. Search Algorithms Gayane Kazhoyan (Stuart Russell, Peter Norvig) Institute for University of Bremen Contents Problem Definition Uninformed search strategies BFS Uniform-Cost DFS Depth-Limited Iterative
6. Search Algorithms Gayane Kazhoyan (Stuart Russell, Peter Norvig) Institute for University of Bremen Contents Problem Definition Uninformed search strategies BFS Uniform-Cost DFS Depth-Limited Iterative
Chapter3. Problem-Solving Agents. Problem Solving Agents (cont.) Well-defined Problems and Solutions. Example Problems.
 Well-defined Problems and Solutions. Example Problems.") Problem-Solving Agents Chapter3 Solving Problems by Searching Reflex agents cannot work well in those environments - state/action mapping too large - take too long to learn Problem-solving agent - is one
Problem-Solving Agents Chapter3 Solving Problems by Searching Reflex agents cannot work well in those environments - state/action mapping too large - take too long to learn Problem-solving agent - is one
Problem solving and search
 Problem solving and search hapter 3 hapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms hapter 3 3 Restricted form of general agent: Problem-solving
Problem solving and search hapter 3 hapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms hapter 3 3 Restricted form of general agent: Problem-solving
COMP3702/7702 Artificial Intelligence Week2: Search (Russell & Norvig ch. 3)" Hanna Kurniawati"
 Hanna Kurniawati") COMP3702/7702 Artificial Intelligence Week2: Search (Russell & Norvig ch. 3)" Hanna Kurniawati" Last week" What is Artificial Intelligence?" Some history" Agent defined" The agent design problem" Search:
COMP3702/7702 Artificial Intelligence Week2: Search (Russell & Norvig ch. 3)" Hanna Kurniawati" Last week" What is Artificial Intelligence?" Some history" Agent defined" The agent design problem" Search:
Solving problems by searching. Chapter 3
 Solving problems by searching Chapter 3 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 2 Example: Romania On holiday in Romania; currently in
Solving problems by searching Chapter 3 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 2 Example: Romania On holiday in Romania; currently in
Chapter 3. A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states.
 Chapter 3 A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states. A problem can be defined by four components : 1. The
Chapter 3 A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states. A problem can be defined by four components : 1. The
Artificial Intelligence: Search Part 1: Uninformed graph search
 rtificial Intelligence: Search Part 1: Uninformed graph search Thomas Trappenberg January 8, 2009 ased on the slides provided by Russell and Norvig, hapter 3 Search outline Part 1: Uninformed search (tree
rtificial Intelligence: Search Part 1: Uninformed graph search Thomas Trappenberg January 8, 2009 ased on the slides provided by Russell and Norvig, hapter 3 Search outline Part 1: Uninformed search (tree
Artificial Intelligence Uninformed search
 Artificial Intelligence Uninformed search A.I. Uninformed search 1 The symbols&search hypothesis for AI Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search
Artificial Intelligence Uninformed search A.I. Uninformed search 1 The symbols&search hypothesis for AI Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search
Search Algorithms. Uninformed Blind search. Informed Heuristic search. Important concepts:
 Uninformed Search Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy search,
Uninformed Search Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy search,
Pengju XJTU 2016
 Introduction to AI Chapter03 Solving Problems by Uninformed Searching(3.1~3.4) Pengju Ren@IAIR Outline Problem-solving agents Problem types Problem formulation Search on Trees and Graphs Uninformed algorithms
Introduction to AI Chapter03 Solving Problems by Uninformed Searching(3.1~3.4) Pengju Ren@IAIR Outline Problem-solving agents Problem types Problem formulation Search on Trees and Graphs Uninformed algorithms
Problem Solving as Search. CMPSCI 383 September 15, 2011
 Problem Solving as Search CMPSCI 383 September 15, 2011 1 Today s lecture Problem-solving as search Uninformed search methods Problem abstraction Bold Claim: Many problems faced by intelligent agents,
Problem Solving as Search CMPSCI 383 September 15, 2011 1 Today s lecture Problem-solving as search Uninformed search methods Problem abstraction Bold Claim: Many problems faced by intelligent agents,
Solving Problems by Searching
 Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching
 Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Artificial Intelligence
 Artificial Intelligence Dr Ahmed Rafat Abas Computer Science Dept, Faculty of Computers and Informatics, Zagazig University arabas@zu.edu.eg http://www.arsaliem.faculty.zu.edu.eg/ Solving problems by searching
Artificial Intelligence Dr Ahmed Rafat Abas Computer Science Dept, Faculty of Computers and Informatics, Zagazig University arabas@zu.edu.eg http://www.arsaliem.faculty.zu.edu.eg/ Solving problems by searching
Intelligent Agents. Foundations of Artificial Intelligence. Problem-Solving as Search. A Simple Reflex Agent. Agent with Model and Internal State
 Intelligent s Foundations of Artificial Intelligence Problem-Solving as Search S7 Fall 007 Thorsten Joachims : Anything that can be viewed as perceiving its environment through sensors and acting upon
Intelligent s Foundations of Artificial Intelligence Problem-Solving as Search S7 Fall 007 Thorsten Joachims : Anything that can be viewed as perceiving its environment through sensors and acting upon
4. Solving Problems by Searching
 COMP9414/9814/3411 15s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence 4. Solving Problems by Searching Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions
COMP9414/9814/3411 15s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence 4. Solving Problems by Searching Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions
Downloaded from ioenotes.edu.np
 Chapter- 3: Searching - Searching the process finding the required states or nodes. - Searching is to be performed through the state space. - Search process is carried out by constructing a search tree.
Chapter- 3: Searching - Searching the process finding the required states or nodes. - Searching is to be performed through the state space. - Search process is carried out by constructing a search tree.
Today. Search Problems. Uninformed Search Methods. Depth-First Search Breadth-First Search Uniform-Cost Search
 Uninformed Serch [These slides were creted by Dn Klein nd Pieter Abbeel for CS188 Intro to AI t UC Berkeley. All CS188 mterils re vilble t http://i.berkeley.edu.] Tody Serch Problems Uninformed Serch Methods
Uninformed Serch [These slides were creted by Dn Klein nd Pieter Abbeel for CS188 Intro to AI t UC Berkeley. All CS188 mterils re vilble t http://i.berkeley.edu.] Tody Serch Problems Uninformed Serch Methods
Goal-Based Agents Problem solving as search. Outline
 Goal-Based Agents Problem solving as search Vasant Honavar Bioinformatics and Computational Biology Program Center for Computational Intelligence, Learning, & Discovery honavar@cs.iastate.edu www.cs.iastate.edu/~honavar/
Goal-Based Agents Problem solving as search Vasant Honavar Bioinformatics and Computational Biology Program Center for Computational Intelligence, Learning, & Discovery honavar@cs.iastate.edu www.cs.iastate.edu/~honavar/
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Problem Solving & Heuristic Search
 190.08 Artificial 2016-Spring Problem Solving & Heuristic Search Byoung-Tak Zhang School of Computer Science and Engineering Seoul National University 190.08 Artificial (2016-Spring) http://www.cs.duke.edu/courses/fall08/cps270/
190.08 Artificial 2016-Spring Problem Solving & Heuristic Search Byoung-Tak Zhang School of Computer Science and Engineering Seoul National University 190.08 Artificial (2016-Spring) http://www.cs.duke.edu/courses/fall08/cps270/
Uninformed Search strategies. AIMA sections 3.4,3.5
 AIMA sections 3.4,3.5 search use only the information available in the problem denition Breadth-rst search Uniform-cost search Depth-rst search Depth-limited search Iterative deepening search Breadth-rst
AIMA sections 3.4,3.5 search use only the information available in the problem denition Breadth-rst search Uniform-cost search Depth-rst search Depth-limited search Iterative deepening search Breadth-rst
Solving Problems by Searching (Blindly)
") Solving Problems by Searching (Blindly) R&N: Chap. 3 (many of these slides borrowed from Stanford s AI Class) Problem Solving Agents Decide what to do by finding a sequence of actions that lead to desirable
Solving Problems by Searching (Blindly) R&N: Chap. 3 (many of these slides borrowed from Stanford s AI Class) Problem Solving Agents Decide what to do by finding a sequence of actions that lead to desirable
CS510 \ Lecture Ariel Stolerman
 CS510 \ Lecture02 2012-10-03 1 Ariel Stolerman Midterm Evan will email about that after the lecture, at least 2 lectures from now. The exam will be given in a regular PDF (not an online form). We will
CS510 \ Lecture02 2012-10-03 1 Ariel Stolerman Midterm Evan will email about that after the lecture, at least 2 lectures from now. The exam will be given in a regular PDF (not an online form). We will
Computer Science and Software Engineering University of Wisconsin - Platteville. 3. Search (Part 1) CS 3030 Lecture Notes Yan Shi UW-Platteville
 CS 3030 Lecture Notes Yan Shi UW-Platteville") Computer Science and Software Engineering University of Wisconsin - Platteville 3. Search (Part 1) CS 3030 Lecture Notes Yan Shi UW-Platteville Read: Textbook Chapter 3.7-3.9,3.12, 4. Problem Solving as
Computer Science and Software Engineering University of Wisconsin - Platteville 3. Search (Part 1) CS 3030 Lecture Notes Yan Shi UW-Platteville Read: Textbook Chapter 3.7-3.9,3.12, 4. Problem Solving as
Pengju
 Introduction to AI Chapter03 Solving Problems by Uninformed Searching(3.1~3.4) Pengju Ren@IAIR Outline Problem-solving agents Problem types Problem formulation Search on Trees and Graphs Uninformed algorithms
Introduction to AI Chapter03 Solving Problems by Uninformed Searching(3.1~3.4) Pengju Ren@IAIR Outline Problem-solving agents Problem types Problem formulation Search on Trees and Graphs Uninformed algorithms
DFS. Depth-limited Search
 DFS Completeness? No, fails in infinite depth spaces or spaces with loops Yes, assuming state space finite. Time complexity? O(b m ), terrible if m is much bigger than d. can do well if lots of goals Space
DFS Completeness? No, fails in infinite depth spaces or spaces with loops Yes, assuming state space finite. Time complexity? O(b m ), terrible if m is much bigger than d. can do well if lots of goals Space
Uninformed Search. Chapter 3
 Uninformed Search Chapter 3 (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, Richard Korf, and other UW-AI faculty) Agent s Knowledge Representation Type State
Uninformed Search Chapter 3 (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, Richard Korf, and other UW-AI faculty) Agent s Knowledge Representation Type State
Uninformed (also called blind) search algorithms
 search algorithms") Uninformed (also called blind) search algorithms First Lecture Today (Thu 30 Jun) Read Chapters 18.6.1-2, 20.3.1 Second Lecture Today (Thu 30 Jun) Read Chapter 3.1-3.4 Next Lecture (Tue 5 Jul) Chapters
Uninformed (also called blind) search algorithms First Lecture Today (Thu 30 Jun) Read Chapters 18.6.1-2, 20.3.1 Second Lecture Today (Thu 30 Jun) Read Chapter 3.1-3.4 Next Lecture (Tue 5 Jul) Chapters