Go With The Flow. Optical Flow-based Transport for Image Manifolds. Chinmay Hegde Rice University
|
|
|
- Stella Charles
- 5 years ago
- Views:
Transcription



1 Go With The Flow Optical Flow-based Transport for Image Manifolds Chinmay Hegde Rice University Richard G. Baraniuk Aswin Sankaranarayanan Sriram Nagaraj



2 Sensor Data Deluge


3 Concise Models Our interest in this talk: Ensembles of articulating images translations of an object!: x-offset and y-offset wedgelets!: orientation and offset rotations of a 3D object!: pitch, roll, yaw Image articulation manifold
 Submanifold of the ambient")
4 Image Articulation Manifold N-pixel images: K-dimensional articulation space Then is a K-dimensional image articulation manifold (IAM) Submanifold of the ambient space
5 Image Articulation Manifold N-pixel images: Local isometry: image distance parameter space distance Linear tangent spaces are close approximation locally articulation parameter space
6 Image Articulation Manifold N-pixel images: Local isometry: image distance parameter space distance Linear tangent spaces are close approximation locally articulation parameter space
7 Theory/Practice Disconnect Practical image manifolds are not smooth If images have sharp edges, then manifold is everywhere non-differentiable [Donoho, Grimes,2003] articulation parameter space

8 Theory/Practice Disconnect 1 Lack of isometry Local image distance on manifold should be proportional to articulation distance in parameter space But true only in toy examples Result: poor performance in classification, estimation, tracking, learning, articulation parameter space



9 Theory/Practice Disconnect 2 Lack of local linearity Local image neighborhoods assumed to form a linear tangent subspace on manifold But true only for extremely small neighborhoods Result: cross-fading when synthesizing images that should lie on manifold Input Image Input Image Geodesic Linear path
10 A New Model for Image Manifolds Key Idea: model the IAM in terms of Transport operators For example:

![field f(x, y) = [u(x, y), v(x, y)]](/docs-images/95/124859382/images/11-1.jpg "such that Linearized brightness")
11 Optical Flow Given two images I 1 and I 2, we seek a displacement vector field f(x, y) = [u(x, y), v(x, y)] such that Linearized brightness constancy
12 Optical Flow Manifold (OFM) Consider a reference image and a K-dimensional articulation OFM at Collect optical flows from to all images reachable by a K-dimensional articulation. Call this the optical flow manifold (OFM) IAM Provides a transport operator to propagate along manifold Articulations



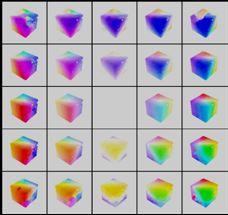
13 OFM: Example Reference Image
14 OFM: Properties Theorem: Collection of OFs (OFM) is a smooth K-dimensional submanifold of [S,H,N,B,2011] OFM at IAM Theorem: OFM is isometric to Euclidean space for a large class of IAMs [S,H,N,B,2011] Articulations


15 OFM = Nonlinear Tangent Space Tangent space at OFM at IAM IAM Articulations Articulations


16 Input Image Input Image IAM Geodesic Linear path OFM

17 App 1: Image Synthesis
18 App 2: Manifold Learning 2D rotations Embedding of OFM Reference image


19 App 2: Manifold Learning Data 196 images of two bears moving linearly and independently Task Find low-dimensional embedding IAM OFM


20 App 3: Karcher Mean Estimation Point on the manifold such that the sum of squared geodesic distances to every other point is minimized Important concept in nonlinear data modeling, compression, shape analysis [Srivastava et al] 10 images from an IAM ground truth KM OFM KM linear KM
21 Summary Manifolds: concise model for many image processing problems involving image collections and multiple sensors/viewpoints But practical image manifolds are non-differentiable manifold-based algorithms have not lived up to their promise Optical flow manifolds (OFMs) smooth even when IAM is not OFM ~ nonlinear tangent space support accurate image synthesis, learning, charting,
22 Blank Slide

23 Open Questions Our treatment is specific to image manifolds under brightness constancy What are the natural transport operators for other data manifolds?
24 Optical Flow two-image sequence optical flow 2 nd image predicted from 1 st via OF (Figures from Ce Liu s optical flow page and ASIFT results page)
25 Limitations Brightness constancy Optical flow is no longer meaningful Occlusion Undefined pixel flow in theory, arbitrary flow estimates in practice Heuristics to deal with it Changing backgrounds etc. Transport operator assumption too strict Sparse correspondences?

26 Pairwise distances and embedding
27 Occlusion Detect occlusion using forward-backward flow reasoning Occluded Remove occluded pixel computations Heuristic --- formal occlusion handling is hard
28 History of Optical Flow Dark ages (<1985) special cases solved LBC an under-determined set of linear equations Horn and Schunk (1985) Regularization term: smoothness prior on the flow Brox et al (2005) shows that linearization of brightness constancy (BC) is a bad assumption develops optimization framework to handle BC directly Brox et al (2010), Black et al (2010), Liu et al (2010) practical systems with reliable code
Go with the Flow: Optical Flow-based Transport Operators for Image Manifolds
 Go with the Flow: Optical Flow-based Transport Operators for Image Manifolds Aswin C. Sankaranarayanan, Chinmay Hegde, Sriram Nagaraj and Richard G. Baraniuk ECE Department, Rice University Abstract Image
Go with the Flow: Optical Flow-based Transport Operators for Image Manifolds Aswin C. Sankaranarayanan, Chinmay Hegde, Sriram Nagaraj and Richard G. Baraniuk ECE Department, Rice University Abstract Image
Non-Differentiable Image Manifolds
 The Multiscale Structure of Non-Differentiable Image Manifolds Michael Wakin Electrical l Engineering i Colorado School of Mines Joint work with Richard Baraniuk, Hyeokho Choi, David Donoho Models for
The Multiscale Structure of Non-Differentiable Image Manifolds Michael Wakin Electrical l Engineering i Colorado School of Mines Joint work with Richard Baraniuk, Hyeokho Choi, David Donoho Models for
Dimension Reduction of Image Manifolds
 Dimension Reduction of Image Manifolds Arian Maleki Department of Electrical Engineering Stanford University Stanford, CA, 9435, USA E-mail: arianm@stanford.edu I. INTRODUCTION Dimension reduction of datasets
Dimension Reduction of Image Manifolds Arian Maleki Department of Electrical Engineering Stanford University Stanford, CA, 9435, USA E-mail: arianm@stanford.edu I. INTRODUCTION Dimension reduction of datasets
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
Optic Flow and Basics Towards Horn-Schunck 1
 Optic Flow and Basics Towards Horn-Schunck 1 Lecture 7 See Section 4.1 and Beginning of 4.2 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information.
Optic Flow and Basics Towards Horn-Schunck 1 Lecture 7 See Section 4.1 and Beginning of 4.2 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information.
Mariya Zhariy. Uttendorf Introduction to Optical Flow. Mariya Zhariy. Introduction. Determining. Optical Flow. Results. Motivation Definition
 to Constraint to Uttendorf 2005 Contents to Constraint 1 Contents to Constraint 1 2 Constraint Contents to Constraint 1 2 Constraint 3 Visual cranial reflex(vcr)(?) to Constraint Rapidly changing scene
to Constraint to Uttendorf 2005 Contents to Constraint 1 Contents to Constraint 1 2 Constraint Contents to Constraint 1 2 Constraint 3 Visual cranial reflex(vcr)(?) to Constraint Rapidly changing scene
EE 264: Image Processing and Reconstruction. Image Motion Estimation I. EE 264: Image Processing and Reconstruction. Outline
 1 Image Motion Estimation I 2 Outline 1. Introduction to Motion 2. Why Estimate Motion? 3. Global vs. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical Flow Estimation
1 Image Motion Estimation I 2 Outline 1. Introduction to Motion 2. Why Estimate Motion? 3. Global vs. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical Flow Estimation
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Module 7 VIDEO CODING AND MOTION ESTIMATION
 Module 7 VIDEO CODING AND MOTION ESTIMATION Lesson 20 Basic Building Blocks & Temporal Redundancy Instructional Objectives At the end of this lesson, the students should be able to: 1. Name at least five
Module 7 VIDEO CODING AND MOTION ESTIMATION Lesson 20 Basic Building Blocks & Temporal Redundancy Instructional Objectives At the end of this lesson, the students should be able to: 1. Name at least five
Scattered Data Problems on (Sub)Manifolds
Manifolds") Scattered Data Problems on (Sub)Manifolds Lars-B. Maier Technische Universität Darmstadt 04.03.2016 Lars-B. Maier (Darmstadt) Scattered Data Problems on (Sub)Manifolds 04.03.2016 1 / 60 Sparse Scattered
Scattered Data Problems on (Sub)Manifolds Lars-B. Maier Technische Universität Darmstadt 04.03.2016 Lars-B. Maier (Darmstadt) Scattered Data Problems on (Sub)Manifolds 04.03.2016 1 / 60 Sparse Scattered
CS-465 Computer Vision
 CS-465 Computer Vision Nazar Khan PUCIT 9. Optic Flow Optic Flow Nazar Khan Computer Vision 2 / 25 Optic Flow Nazar Khan Computer Vision 3 / 25 Optic Flow Where does pixel (x, y) in frame z move to in
CS-465 Computer Vision Nazar Khan PUCIT 9. Optic Flow Optic Flow Nazar Khan Computer Vision 2 / 25 Optic Flow Nazar Khan Computer Vision 3 / 25 Optic Flow Where does pixel (x, y) in frame z move to in
VC 11/12 T11 Optical Flow
 VC 11/12 T11 Optical Flow Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Optical Flow Constraint Equation Aperture
VC 11/12 T11 Optical Flow Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Optical Flow Constraint Equation Aperture
Motion. 1 Introduction. 2 Optical Flow. Sohaib A Khan. 2.1 Brightness Constancy Equation
 Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
2580 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 19, NO. 10, OCTOBER 2010
 2580 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 19, NO. 10, OCTOBER 2010 Joint Manifolds for Data Fusion Mark A. Davenport, Member, IEEE, Chinmay Hegde, Student Member, IEEE, Marco F. Duarte, Member,
2580 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 19, NO. 10, OCTOBER 2010 Joint Manifolds for Data Fusion Mark A. Davenport, Member, IEEE, Chinmay Hegde, Student Member, IEEE, Marco F. Duarte, Member,
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
Introduction to Immersion, Embedding, and the Whitney Embedding Theorems
 Introduction to Immersion, Embedding, and the Whitney Embedding Theorems Paul Rapoport November 23, 2015 Abstract We give an overview of immersion in order to present the idea of embedding, then discuss
Introduction to Immersion, Embedding, and the Whitney Embedding Theorems Paul Rapoport November 23, 2015 Abstract We give an overview of immersion in order to present the idea of embedding, then discuss
Introduction to geometry
 1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
CS 565 Computer Vision. Nazar Khan PUCIT Lectures 15 and 16: Optic Flow
 CS 565 Computer Vision Nazar Khan PUCIT Lectures 15 and 16: Optic Flow Introduction Basic Problem given: image sequence f(x, y, z), where (x, y) specifies the location and z denotes time wanted: displacement
CS 565 Computer Vision Nazar Khan PUCIT Lectures 15 and 16: Optic Flow Introduction Basic Problem given: image sequence f(x, y, z), where (x, y) specifies the location and z denotes time wanted: displacement
Joint Manifolds for Data Fusion
 Joint Manifolds for Data Fusion Mark A. Davenport, Student Member, IEEE, Chinmay Hegde, Student Member, IEEE Marco F. Duarte, Member, IEEE, and Richard G. Baraniuk, Fellow, IEEE Abstract The emergence
Joint Manifolds for Data Fusion Mark A. Davenport, Student Member, IEEE, Chinmay Hegde, Student Member, IEEE Marco F. Duarte, Member, IEEE, and Richard G. Baraniuk, Fellow, IEEE Abstract The emergence
Compressive Sensing. Part IV: Beyond Sparsity. Mark A. Davenport. Stanford University Department of Statistics
 Compressive Sensing Part IV: Beyond Sparsity Mark A. Davenport Stanford University Department of Statistics Beyond Sparsity Not all signal models fit neatly into the sparse setting The concept of dimension
Compressive Sensing Part IV: Beyond Sparsity Mark A. Davenport Stanford University Department of Statistics Beyond Sparsity Not all signal models fit neatly into the sparse setting The concept of dimension
Lecture 19: Motion. Effect of window size 11/20/2007. Sources of error in correspondences. Review Problem set 3. Tuesday, Nov 20
 Lecture 19: Motion Review Problem set 3 Dense stereo matching Sparse stereo matching Indexing scenes Tuesda, Nov 0 Effect of window size W = 3 W = 0 Want window large enough to have sufficient intensit
Lecture 19: Motion Review Problem set 3 Dense stereo matching Sparse stereo matching Indexing scenes Tuesda, Nov 0 Effect of window size W = 3 W = 0 Want window large enough to have sufficient intensit
Compressive Sensing for High-Dimensional Data
 Compressive Sensing for High-Dimensional Data Richard Baraniuk Rice University dsp.rice.edu/cs DIMACS Workshop on Recent Advances in Mathematics and Information Sciences for Analysis and Understanding
Compressive Sensing for High-Dimensional Data Richard Baraniuk Rice University dsp.rice.edu/cs DIMACS Workshop on Recent Advances in Mathematics and Information Sciences for Analysis and Understanding
Transferring Colours to Grayscale Images by Locally Linear Embedding
 Transferring Colours to Grayscale Images by Locally Linear Embedding Jun Li, Pengwei Hao Department of Computer Science, Queen Mary, University of London Mile End, London, E1 4NS {junjy, phao}@dcs.qmul.ac.uk
Transferring Colours to Grayscale Images by Locally Linear Embedding Jun Li, Pengwei Hao Department of Computer Science, Queen Mary, University of London Mile End, London, E1 4NS {junjy, phao}@dcs.qmul.ac.uk
Lecture 20: Tracking. Tuesday, Nov 27
 Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Don t just read it; fight it! Ask your own questions, look for your own examples, discover your own proofs. Is the hypothesis necessary?
 Don t just read it; fight it! Ask your own questions, look for your own examples, discover your own proofs. Is the hypothesis necessary? Is the converse true? What happens in the classical special case?
Don t just read it; fight it! Ask your own questions, look for your own examples, discover your own proofs. Is the hypothesis necessary? Is the converse true? What happens in the classical special case?
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
Horn-Schunck and Lucas Kanade 1
 Horn-Schunck and Lucas Kanade 1 Lecture 8 See Sections 4.2 and 4.3 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 40 Where We
Horn-Schunck and Lucas Kanade 1 Lecture 8 See Sections 4.2 and 4.3 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 40 Where We
Joint Manifolds for Data Fusion
 Joint Manifolds for Data Fusion Mark A. Davenport, Student Member, IEEE, Chinmay Hegde, Student Member, IEEE Marco F. Duarte, Member, IEEE, and Richard G. Baraniuk, Fellow, IEEE Abstract The emergence
Joint Manifolds for Data Fusion Mark A. Davenport, Student Member, IEEE, Chinmay Hegde, Student Member, IEEE Marco F. Duarte, Member, IEEE, and Richard G. Baraniuk, Fellow, IEEE Abstract The emergence
COMPRESSED DETECTION VIA MANIFOLD LEARNING. Hyun Jeong Cho, Kuang-Hung Liu, Jae Young Park. { zzon, khliu, jaeypark
 COMPRESSED DETECTION VIA MANIFOLD LEARNING Hyun Jeong Cho, Kuang-Hung Liu, Jae Young Park Email : { zzon, khliu, jaeypark } @umich.edu 1. INTRODUCTION In many imaging applications such as Computed Tomography
COMPRESSED DETECTION VIA MANIFOLD LEARNING Hyun Jeong Cho, Kuang-Hung Liu, Jae Young Park Email : { zzon, khliu, jaeypark } @umich.edu 1. INTRODUCTION In many imaging applications such as Computed Tomography
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Compressive Sensing: Opportunities and Perils for Computer Vision
 Compressive Sensing: Opportunities and Perils for Computer Vision Rama Chellappa And Volkan Cevher (Rice) Joint work with Aswin C. Sankaranarayanan Dikpal Reddy Dr. Ashok Veeraraghavan (MERL) Prof. Rich
Compressive Sensing: Opportunities and Perils for Computer Vision Rama Chellappa And Volkan Cevher (Rice) Joint work with Aswin C. Sankaranarayanan Dikpal Reddy Dr. Ashok Veeraraghavan (MERL) Prof. Rich
EECS 556 Image Processing W 09
 EECS 556 Image Processing W 09 Motion estimation Global vs. Local Motion Block Motion Estimation Optical Flow Estimation (normal equation) Man slides of this lecture are courtes of prof Milanfar (UCSC)
EECS 556 Image Processing W 09 Motion estimation Global vs. Local Motion Block Motion Estimation Optical Flow Estimation (normal equation) Man slides of this lecture are courtes of prof Milanfar (UCSC)
Quasilinear First-Order PDEs
 MODULE 2: FIRST-ORDER PARTIAL DIFFERENTIAL EQUATIONS 16 Lecture 3 Quasilinear First-Order PDEs A first order quasilinear PDE is of the form a(x, y, z) + b(x, y, z) x y = c(x, y, z). (1) Such equations
MODULE 2: FIRST-ORDER PARTIAL DIFFERENTIAL EQUATIONS 16 Lecture 3 Quasilinear First-Order PDEs A first order quasilinear PDE is of the form a(x, y, z) + b(x, y, z) x y = c(x, y, z). (1) Such equations
Multi-Robot Target Verification With Reachability Constraints
 To appear in Proc. 10th IEEE Intl. Symp. on Safety, Security, and Rescue Robotics (SSRR), 2012. Multi-Robot Target Verification With Reachability Constraints D. K. Grady, M. Moll, C. Hegde, A. C. Sankaranarayanan,
To appear in Proc. 10th IEEE Intl. Symp. on Safety, Security, and Rescue Robotics (SSRR), 2012. Multi-Robot Target Verification With Reachability Constraints D. K. Grady, M. Moll, C. Hegde, A. C. Sankaranarayanan,
Visual motion. Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys
 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes Motion and perceptual organization Sometimes, motion is the onl cue Motion and perceptual organization Sometimes, motion is the
Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes Motion and perceptual organization Sometimes, motion is the onl cue Motion and perceptual organization Sometimes, motion is the
cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry
 cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry Steven Scher December 2, 2004 Steven Scher SteveScher@alumni.princeton.edu Abstract Three-dimensional
cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry Steven Scher December 2, 2004 Steven Scher SteveScher@alumni.princeton.edu Abstract Three-dimensional
Subpixel accurate refinement of disparity maps using stereo correspondences
 Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Compressive Sensing of High-Dimensional Visual Signals. Aswin C Sankaranarayanan Rice University
 Compressive Sensing of High-Dimensional Visual Signals Aswin C Sankaranarayanan Rice University Interaction of light with objects Reflection Fog Volumetric scattering Human skin Sub-surface scattering
Compressive Sensing of High-Dimensional Visual Signals Aswin C Sankaranarayanan Rice University Interaction of light with objects Reflection Fog Volumetric scattering Human skin Sub-surface scattering
Lower bounds on the barrier parameter of convex cones
 of convex cones Université Grenoble 1 / CNRS June 20, 2012 / High Performance Optimization 2012, Delft Outline Logarithmically homogeneous barriers 1 Logarithmically homogeneous barriers Conic optimization
of convex cones Université Grenoble 1 / CNRS June 20, 2012 / High Performance Optimization 2012, Delft Outline Logarithmically homogeneous barriers 1 Logarithmically homogeneous barriers Conic optimization
Diffusion Wavelets for Natural Image Analysis
 Diffusion Wavelets for Natural Image Analysis Tyrus Berry December 16, 2011 Contents 1 Project Description 2 2 Introduction to Diffusion Wavelets 2 2.1 Diffusion Multiresolution............................
Diffusion Wavelets for Natural Image Analysis Tyrus Berry December 16, 2011 Contents 1 Project Description 2 2 Introduction to Diffusion Wavelets 2 2.1 Diffusion Multiresolution............................
Tracking. Hao Guan( 管皓 ) School of Computer Science Fudan University
 School of Computer Science Fudan University") Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University 2014-09-29 Multimedia Video Audio Use your eyes Video Tracking Use your ears Audio Tracking Tracking Video Tracking Definition Given
Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University 2014-09-29 Multimedia Video Audio Use your eyes Video Tracking Use your ears Audio Tracking Tracking Video Tracking Definition Given
Geometry and Gravitation
 Chapter 15 Geometry and Gravitation 15.1 Introduction to Geometry Geometry is one of the oldest branches of mathematics, competing with number theory for historical primacy. Like all good science, its
Chapter 15 Geometry and Gravitation 15.1 Introduction to Geometry Geometry is one of the oldest branches of mathematics, competing with number theory for historical primacy. Like all good science, its
Tracking. Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association
 Tracking Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association Key ideas Tracking by detection Tracking through flow Track by detection (simple form)
Tracking Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association Key ideas Tracking by detection Tracking through flow Track by detection (simple form)
Image Transfer Methods. Satya Prakash Mallick Jan 28 th, 2003
 Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
Irradiance Gradients. Media & Occlusions
 Irradiance Gradients in the Presence of Media & Occlusions Wojciech Jarosz in collaboration with Matthias Zwicker and Henrik Wann Jensen University of California, San Diego June 23, 2008 Wojciech Jarosz
Irradiance Gradients in the Presence of Media & Occlusions Wojciech Jarosz in collaboration with Matthias Zwicker and Henrik Wann Jensen University of California, San Diego June 23, 2008 Wojciech Jarosz
Def De orma f tion orma Disney/Pixar
 Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29,
 Variations on the Hermann grid: an extinction illusion. Perception, 29,") Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
SCAPE: Shape Completion and Animation of People
 SCAPE: Shape Completion and Animation of People By Dragomir Anguelov, Praveen Srinivasan, Daphne Koller, Sebastian Thrun, Jim Rodgers, James Davis From SIGGRAPH 2005 Presentation for CS468 by Emilio Antúnez
SCAPE: Shape Completion and Animation of People By Dragomir Anguelov, Praveen Srinivasan, Daphne Koller, Sebastian Thrun, Jim Rodgers, James Davis From SIGGRAPH 2005 Presentation for CS468 by Emilio Antúnez
Random Projections for Manifold Learning
 Random Projections for Manifold Learning Chinmay Hegde ECE Department Rice University ch3@rice.edu Michael B. Wakin EECS Department University of Michigan wakin@eecs.umich.edu Richard G. Baraniuk ECE Department
Random Projections for Manifold Learning Chinmay Hegde ECE Department Rice University ch3@rice.edu Michael B. Wakin EECS Department University of Michigan wakin@eecs.umich.edu Richard G. Baraniuk ECE Department
Robert Collins CSE598G. Intro to Template Matching and the Lucas-Kanade Method
 Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Geometric Correction
 CEE 6150: Digital Image Processing Geometric Correction 1 Sources of Distortion Sensor Characteristics optical distortion aspect ratio non-linear mirror velocity detector geometry & scanning sequence Viewing
CEE 6150: Digital Image Processing Geometric Correction 1 Sources of Distortion Sensor Characteristics optical distortion aspect ratio non-linear mirror velocity detector geometry & scanning sequence Viewing
Optical Flow CS 637. Fuxin Li. With materials from Kristen Grauman, Richard Szeliski, S. Narasimhan, Deqing Sun
 Optical Flow CS 637 Fuxin Li With materials from Kristen Grauman, Richard Szeliski, S. Narasimhan, Deqing Sun Motion and perceptual organization Sometimes, motion is the only cue Motion and perceptual
Optical Flow CS 637 Fuxin Li With materials from Kristen Grauman, Richard Szeliski, S. Narasimhan, Deqing Sun Motion and perceptual organization Sometimes, motion is the only cue Motion and perceptual
UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss
 UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss AAAI 2018, New Orleans, USA Simon Meister, Junhwa Hur, and Stefan Roth Department of Computer Science, TU Darmstadt 2 Deep
UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss AAAI 2018, New Orleans, USA Simon Meister, Junhwa Hur, and Stefan Roth Department of Computer Science, TU Darmstadt 2 Deep
Motion Analysis. Motion analysis. Now we will talk about. Differential Motion Analysis. Motion analysis. Difference Pictures
 Now we will talk about Motion Analysis Motion analysis Motion analysis is dealing with three main groups of motionrelated problems: Motion detection Moving object detection and location. Derivation of
Now we will talk about Motion Analysis Motion analysis Motion analysis is dealing with three main groups of motionrelated problems: Motion detection Moving object detection and location. Derivation of
Geodesic and curvature of piecewise flat Finsler surfaces
 Geodesic and curvature of piecewise flat Finsler surfaces Ming Xu Capital Normal University (based on a joint work with S. Deng) in Southwest Jiaotong University, Emei, July 2018 Outline 1 Background Definition
Geodesic and curvature of piecewise flat Finsler surfaces Ming Xu Capital Normal University (based on a joint work with S. Deng) in Southwest Jiaotong University, Emei, July 2018 Outline 1 Background Definition
Subspace Clustering with Global Dimension Minimization And Application to Motion Segmentation
 Subspace Clustering with Global Dimension Minimization And Application to Motion Segmentation Bryan Poling University of Minnesota Joint work with Gilad Lerman University of Minnesota The Problem of Subspace
Subspace Clustering with Global Dimension Minimization And Application to Motion Segmentation Bryan Poling University of Minnesota Joint work with Gilad Lerman University of Minnesota The Problem of Subspace
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps
 Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Data Mining 4. Cluster Analysis
 Data Mining 4. Cluster Analysis 4.5 Spring 2010 Instructor: Dr. Masoud Yaghini Introduction DBSCAN Algorithm OPTICS Algorithm DENCLUE Algorithm References Outline Introduction Introduction Density-based
Data Mining 4. Cluster Analysis 4.5 Spring 2010 Instructor: Dr. Masoud Yaghini Introduction DBSCAN Algorithm OPTICS Algorithm DENCLUE Algorithm References Outline Introduction Introduction Density-based
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
Data fusion and multi-cue data matching using diffusion maps
 Data fusion and multi-cue data matching using diffusion maps Stéphane Lafon Collaborators: Raphy Coifman, Andreas Glaser, Yosi Keller, Steven Zucker (Yale University) Part of this work was supported by
Data fusion and multi-cue data matching using diffusion maps Stéphane Lafon Collaborators: Raphy Coifman, Andreas Glaser, Yosi Keller, Steven Zucker (Yale University) Part of this work was supported by
Motion and Tracking. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Classification: Linear Discriminant Functions
 Classification: Linear Discriminant Functions CE-725: Statistical Pattern Recognition Sharif University of Technology Spring 2013 Soleymani Outline Discriminant functions Linear Discriminant functions
Classification: Linear Discriminant Functions CE-725: Statistical Pattern Recognition Sharif University of Technology Spring 2013 Soleymani Outline Discriminant functions Linear Discriminant functions
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Layered Scene Decomposition via the Occlusion-CRF Supplementary material
 Layered Scene Decomposition via the Occlusion-CRF Supplementary material Chen Liu 1 Pushmeet Kohli 2 Yasutaka Furukawa 1 1 Washington University in St. Louis 2 Microsoft Research Redmond 1. Additional
Layered Scene Decomposition via the Occlusion-CRF Supplementary material Chen Liu 1 Pushmeet Kohli 2 Yasutaka Furukawa 1 1 Washington University in St. Louis 2 Microsoft Research Redmond 1. Additional
TOOLS FOR ANALYZING SHAPES OF CURVES AND SURFACES. ANUJ SRIVASTAVA Department of Statistics Florida State University
 TOOLS FOR ANALYZING SHAPES OF CURVES AND SURFACES ANUJ SRIVASTAVA Department of Statistics Florida State University 1 MURI: INTGERATED FUSION AND SENSOR MANAGEMENT FOR ATE Innovative Front-End Processing
TOOLS FOR ANALYZING SHAPES OF CURVES AND SURFACES ANUJ SRIVASTAVA Department of Statistics Florida State University 1 MURI: INTGERATED FUSION AND SENSOR MANAGEMENT FOR ATE Innovative Front-End Processing
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
The Lucas & Kanade Algorithm
 The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
Compressive Sensing. A New Framework for Sparse Signal Acquisition and Processing. Richard Baraniuk. Rice University
 Compressive Sensing A New Framework for Sparse Signal Acquisition and Processing Richard Baraniuk Rice University Better, Stronger, Faster Accelerating Data Deluge 1250 billion gigabytes generated in 2010
Compressive Sensing A New Framework for Sparse Signal Acquisition and Processing Richard Baraniuk Rice University Better, Stronger, Faster Accelerating Data Deluge 1250 billion gigabytes generated in 2010
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Compressive Parameter Estimation with Earth Mover s Distance via K-means Clustering. Dian Mo and Marco F. Duarte
 Compressive Parameter Estimation with Earth Mover s Distance via K-means Clustering Dian Mo and Marco F. Duarte Compressive Sensing (CS) Integrates linear acquisition with dimensionality reduction linear
Compressive Parameter Estimation with Earth Mover s Distance via K-means Clustering Dian Mo and Marco F. Duarte Compressive Sensing (CS) Integrates linear acquisition with dimensionality reduction linear
Data Term. Michael Bleyer LVA Stereo Vision
 Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Shape analysis through geometric distributions
 Shape analysis through geometric distributions Nicolas Charon (CIS, Johns Hopkins University) joint work with B. Charlier (Université de Montpellier), I. Kaltenmark (CMLA), A. Trouvé, Hsi-Wei Hsieh (JHU)...
Shape analysis through geometric distributions Nicolas Charon (CIS, Johns Hopkins University) joint work with B. Charlier (Université de Montpellier), I. Kaltenmark (CMLA), A. Trouvé, Hsi-Wei Hsieh (JHU)...
CURRICULUM CATALOG. Geometry ( ) TX
 TX") 2018-19 CURRICULUM CATALOG Table of Contents GEOMETRY (03100700) TX COURSE OVERVIEW... 1 UNIT 1: INTRODUCTION... 1 UNIT 2: LOGIC... 1 UNIT 3: ANGLES AND PARALLELS... 2 UNIT 4: CONGRUENT TRIANGLES AND QUADRILATERALS...
2018-19 CURRICULUM CATALOG Table of Contents GEOMETRY (03100700) TX COURSE OVERVIEW... 1 UNIT 1: INTRODUCTION... 1 UNIT 2: LOGIC... 1 UNIT 3: ANGLES AND PARALLELS... 2 UNIT 4: CONGRUENT TRIANGLES AND QUADRILATERALS...
Survey of the Mathematics of Big Data
 Survey of the Mathematics of Big Data Issues with Big Data, Mathematics to the Rescue Philippe B. Laval KSU Fall 2015 Philippe B. Laval (KSU) Math & Big Data Fall 2015 1 / 28 Introduction We survey some
Survey of the Mathematics of Big Data Issues with Big Data, Mathematics to the Rescue Philippe B. Laval KSU Fall 2015 Philippe B. Laval (KSU) Math & Big Data Fall 2015 1 / 28 Introduction We survey some
Technical Report. Title: Manifold learning and Random Projections for multi-view object recognition
 Technical Report Title: Manifold learning and Random Projections for multi-view object recognition Authors: Grigorios Tsagkatakis 1 and Andreas Savakis 2 1 Center for Imaging Science, Rochester Institute
Technical Report Title: Manifold learning and Random Projections for multi-view object recognition Authors: Grigorios Tsagkatakis 1 and Andreas Savakis 2 1 Center for Imaging Science, Rochester Institute
Tutorial: Compressive Sensing of Video
 Tutorial: Compressive Sensing of Video Venue: CVPR 2012, Providence, Rhode Island, USA June 16, 2012 Richard Baraniuk Mohit Gupta Aswin Sankaranarayanan Ashok Veeraraghavan Tutorial: Compressive Sensing
Tutorial: Compressive Sensing of Video Venue: CVPR 2012, Providence, Rhode Island, USA June 16, 2012 Richard Baraniuk Mohit Gupta Aswin Sankaranarayanan Ashok Veeraraghavan Tutorial: Compressive Sensing
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Geometric transformations in 3D and coordinate frames. Computer Graphics CSE 167 Lecture 3
 Geometric transformations in 3D and coordinate frames Computer Graphics CSE 167 Lecture 3 CSE 167: Computer Graphics 3D points as vectors Geometric transformations in 3D Coordinate frames CSE 167, Winter
Geometric transformations in 3D and coordinate frames Computer Graphics CSE 167 Lecture 3 CSE 167: Computer Graphics 3D points as vectors Geometric transformations in 3D Coordinate frames CSE 167, Winter
Generalized Principal Component Analysis CVPR 2007
 Generalized Principal Component Analysis Tutorial @ CVPR 2007 Yi Ma ECE Department University of Illinois Urbana Champaign René Vidal Center for Imaging Science Institute for Computational Medicine Johns
Generalized Principal Component Analysis Tutorial @ CVPR 2007 Yi Ma ECE Department University of Illinois Urbana Champaign René Vidal Center for Imaging Science Institute for Computational Medicine Johns
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images
 Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Stable and Multiscale Topological Signatures
 Stable and Multiscale Topological Signatures Mathieu Carrière, Steve Oudot, Maks Ovsjanikov Inria Saclay Geometrica April 21, 2015 1 / 31 Shape = point cloud in R d (d = 3) 2 / 31 Signature = mathematical
Stable and Multiscale Topological Signatures Mathieu Carrière, Steve Oudot, Maks Ovsjanikov Inria Saclay Geometrica April 21, 2015 1 / 31 Shape = point cloud in R d (d = 3) 2 / 31 Signature = mathematical
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Ensemble methods in machine learning. Example. Neural networks. Neural networks
 Ensemble methods in machine learning Bootstrap aggregating (bagging) train an ensemble of models based on randomly resampled versions of the training set, then take a majority vote Example What if you
Ensemble methods in machine learning Bootstrap aggregating (bagging) train an ensemble of models based on randomly resampled versions of the training set, then take a majority vote Example What if you
Semi-supervised Regression using Hessian Energy with an Application to Semi-supervised Dimensionality Reduction
 Semi-supervised Regression using Hessian Energy with an Application to Semi-supervised Dimensionality Reduction Kwang In Kim, Florian Steinke,3, and Matthias Hein Department of Computer Science, Saarland
Semi-supervised Regression using Hessian Energy with an Application to Semi-supervised Dimensionality Reduction Kwang In Kim, Florian Steinke,3, and Matthias Hein Department of Computer Science, Saarland
Multiple Object Tracking using Kalman Filter and Optical Flow
 Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2015, 2(2): 34-39 Research Article ISSN: 2394-658X Multiple Object Tracking using Kalman Filter and Optical Flow
Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2015, 2(2): 34-39 Research Article ISSN: 2394-658X Multiple Object Tracking using Kalman Filter and Optical Flow
Humanoid Robotics. Least Squares. Maren Bennewitz
 Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Preview. Two-Dimensional Motion and Vectors Section 1. Section 1 Introduction to Vectors. Section 2 Vector Operations. Section 3 Projectile Motion
 Two-Dimensional Motion and Vectors Section 1 Preview Section 1 Introduction to Vectors Section 2 Vector Operations Section 3 Projectile Motion Section 4 Relative Motion Two-Dimensional Motion and Vectors
Two-Dimensional Motion and Vectors Section 1 Preview Section 1 Introduction to Vectors Section 2 Vector Operations Section 3 Projectile Motion Section 4 Relative Motion Two-Dimensional Motion and Vectors
Announcements. Edges. Last Lecture. Gradients: Numerical Derivatives f(x) Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10
 Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10") Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Stereo Matching.
 Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Today. Gradient descent for minimization of functions of real variables. Multi-dimensional scaling. Self-organizing maps
 Today Gradient descent for minimization of functions of real variables. Multi-dimensional scaling Self-organizing maps Gradient Descent Derivatives Consider function f(x) : R R. The derivative w.r.t. x
Today Gradient descent for minimization of functions of real variables. Multi-dimensional scaling Self-organizing maps Gradient Descent Derivatives Consider function f(x) : R R. The derivative w.r.t. x