Greedy Routing in Wireless Networks. Jie Gao Stony Brook University
|
|
|
- Maximillian Hill
- 5 years ago
- Views:
Transcription
1 Greedy Routing in Wireless Networks Jie Gao Stony Brook University

2 A generic sensor node CPU. On-board flash memory or external memory Sensors: thermometer, camera, motion, light sensor, etc. Wireless radio. Battery. 2013/6/21 2

3 Environment Monitoring Cyber Physical Systems Participatory Sensing 2013/6/21 3
4 Greedy Routing Assign coordinatesto nodes Message moves to neighbor closestto destination Simple, compact, scalable 4
5 Our objective 1. Examine a realistic setting of dense networks with holes 2. Greedy routing w/ nice properties Guaranteed delivery Load balancing Multipath routing Link dynamics Node mobility Tool: computational geometry. 5

6 Large-scale sensor field large-scale, dense deployment. Sufficient sensor coverage. w/ holes/obstacles. Prominent feature: shape of the network. 2013/6/21 6
7 Local view vs. global view Local view dense graphs links are dynamic Global view geometric model topology is stable 7
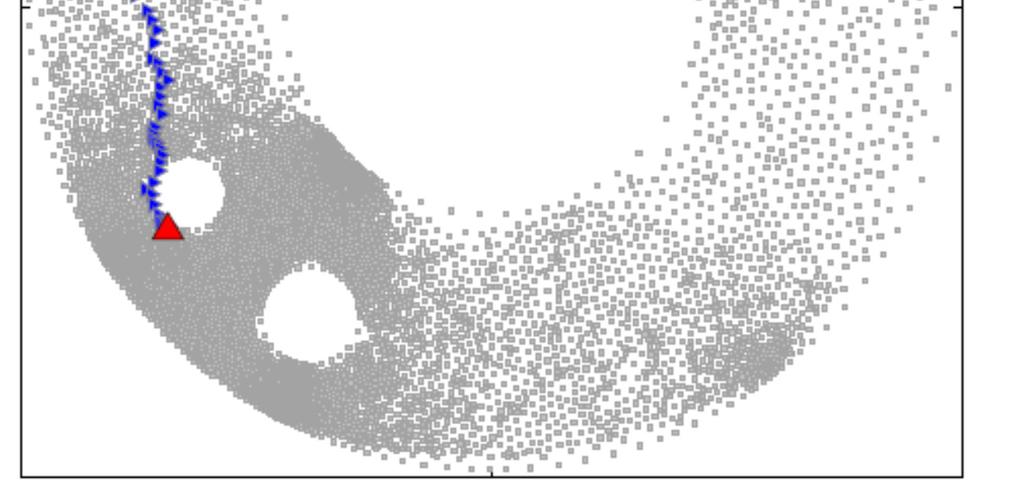
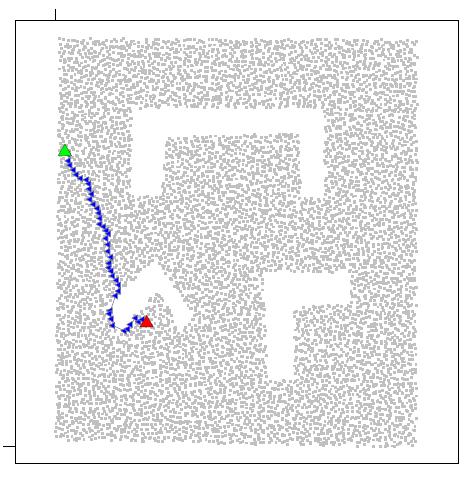
8 Part I: Guaranteed delivery Can get stuck 1 st idea: take detour to get around the local minimum. Lake 2 nd idea: assign new coordinates & remove local minima. 8

9 Deform the holes to be circular Greedy routing does not get stuck at circular holes. Ricci flow 9
10 Curvature R Osculating circle Curvature: κ= 1/R Flatter curves have smaller curvature. 10
11 Changing the Curvature Flatten a curve: κ 0 R Make a cycle round κ 1/R 11
12 Discrete Curvature Turning angle Sum of curvature = 2π 12
13 Discrete Curvature in 2D Triangulated Surface For an interior vertex Deviation from the plane Corner angle For a vertex on the boundary Deviation from straight line 13



14 What they look like Negative Curvature Positive Curvature 14
 (# holes) Ricci flow: diffuse uneven curvatures to")
15 Discrete Curvature in 2D Triangulated Surface Gauss Bonnet Theorem: total curvature of a surface M is a topological invariant: Euler Characteristic: 2 2(# handles) (# holes) Ricci flow: diffuse uneven curvatures to constant 15

16 Sanity check: total curvature h holes, Euler characteristics = 2-(h+1) Outer boundary: curvature 2π Each inner hole: -2π Interior vertex: 0 Total curvature: (1-h)2π 16


17 Ricci Flow in our case Target: a metric with pre-specified curvature Boundary cycle 17
18 Ricci flow on sensor networks Curvature flow (Ricci flow) is a natural distributed algorithm. Each node computes its current curvature & compare with target curvature Each node changes the length of its adjacent edges ~ the curvature difference Iterate Ricci energy is strictly convex unique solution 2013/6/21 18

19 Routing 19
20 Deforming into a circular domain Deform a complex shape to a simple one, making it easy to explore the space of paths. Multi-path routing Recover from link failure 2013/6/21 20
21 Circular Domains are not Unique Embedding into a circular domain is not unique, they differ by a Möbius transformation. 21

22 MöbiusTransform Möbius transform Conformal: maps circles to circles Four basic elements: translation, dilation, rotation, inversions. a, b, c, d are 4 complex numbers, ad bc 22
23 Greedy Paths in Different Circular Domains Generate disjoint paths using different transformations s t f 1 s t 23
24 Greedy Paths in Different Circular Domains Generate disjoint paths using different transformations s t f 2 s t 24

25 Recovery from Temporary Link Failure We compute a Möbius transformation S.t.the broken link is NOTon the greedy path. Möbius transform attached to packet. Make big jumps 25
26 Our objective 1. Examine a realistic setting of dense networks with holes 2. Greedy routing w/ nice properties Guaranteed delivery Load balancing Multipath routing Link dynamics Node mobility 26

27 Part II: Load Balancing 27

28 Boundary nodes get overloaded Traffic Load 28
29 Soln: Reduce boundary load Use covering space to tile up the domain; Boundary disappears. 29
30 Reflections using MöbiusTransform Map inside out Unit circle at origin A circleat c with radius r z 1 f(z) z f(z) 1 O r c z 30

31 Step 1: Map All Holes Circular 31

32 Step 2: Reflect Network for Each Hole 32

33 Step 3: Continue until all Holes are Small 33
34 Covering Space: Tile up the domain 34
35 Reflections Theorem: Total area of the holes shrinks exponentially fast. After O(log 1/ε) reflections, size of holes ~ ε. In practice 5 levels of reflections Reflections are computed on demand. 35


36 Routing in the covering space Equivalently, reflect on the hole boundary 36
37 Our objective 1. Examine a realistic setting of dense networks with holes 2. Greedy routing w/ nice properties Guaranteed delivery Load balancing Multipath routing Link dynamics Node mobility 37
38 Circular domain embedding for mobile networks? What if nodes move around: Run Ricci flow again to get the new coordinates Location management scheme to update and maintain the current location information Our goal: Avoid running Ricci flow again when nodes move Compute the new virtual coordinates efficiently 38
39 Our Solution Assuming mobile nodes densely covering the domain Compute a compact map for the geometric domain in advance Preload the map to all nodes. Apply greedy routing based on virtual coordinates directly computed from the map 39
40 Compute the Compact Map Compute the continuous conformal map from the geometric domain to a circular domain Encode the map by the Schwarz-Christoffel Transformation 40
41 Schwarz-ChristoffelTransformation Describe a conformal map of a disk onto the interior of a simple polygon 41
42 Schwarz-ChristoffelTransformation We need the inverse: mapping a simple polygon onto a disk g 42

43 An Example 43

44 Greedy Routing with Geographical Coordinates 44

45 Greedy Routing with Virtual Coordinates 45


46 Extensions Multiply connected domain Similar ideas Use Laurent series
47 Summary Deformation of network metric by changing local curvatures. Simplify the network shape to benefit network management. 47
48 Acknowledgement Joint work with Xianfeng David Gu, Feng Luo, Rik Sarkar, Wei Zeng, Xiaomeng Ban, Ruirui Jiang, MayankGoswami, XiaotianYin, Xiaokang Yu, Siming Li 48
49 References Greedy Routing with Guaranteed Delivery Using Ricci Flows, IPSN'09. Resilient Routing for Sensor Networks using Hyperbolic Embedding of Universal Covering Space, INFOCOM 10 Covering Space for In-Network Sensor Data Storage, IPSN 10. Spherical Representation and Polyhedron Routing for Load Balancing in Wireless Sensor Networks, INFOCOM 11. Exploration of Path Space using Sensor Network Geometry, IPSN 11. Scalable Routing in 3D High Genus Sensor Networks Using Graph Embedding, INFOCOM 12. Topology Dependent Space Filling Curves for Sensor Networks and Applications, INFOCOM 13. Compact Conformal Map for Greedy Routing in Wireless Mobile Sensor Networks, INFOCOM

50 Questions? 50

51 Local view 51
52 Graph abstraction of sensor networks The graph view of a sensor network depends very much on the network connectivity, which is not stable: links come and go, nodes fail Dynamic graph problems, in general, are difficult problems. 52

53 Global view obstacles 53
54 Geometric View of Sensor Networks The global geometry/ topology is stable Computational geometers know how to handle shapes obstacle 54
55 Greedy embedding An embedding in which greedy routing always succeeds. [Papadimitriou, Ratajczak 05] Not all graphs have a greedy embedding. 3-connected planar graph has a greedy embedding [Leighton, Moitra 08][Angelini etal 08] Very nice theory In practice: links go up and down; maintaining the greedy drawing is non-trivial. 55


56 Ricci Flow: diffuse curvature Riemannian metric g on M We modify g by curvature Curvature evolves: Same equation as heat diffusion Δ: Laplace operator 56

57 Ricci Flow: diffuse curvature Ricci energy is strictly convex unique solution with constant curvatureeverywhere and equal surface area. Conformal map: angle preserving 57
58 Discrete Flow : Circle Packing Conformal deformation : Change edge lengths of the triangulation, keep angles same Circle packing metric: Radius at each vertex + angle at intersection Related to edge length by cosine law Remark: no need of an embedding (vertex location) 58
59 Background [Hamilton 82, Chow 91] : Smooth curvature flow flattens the metric [Thurston 85, Sullivan and Rodin 87] : Circle packing discrete conformal maps [He and Schramm 93, 96] : Discrete flow with non-uniform triangulations [Chow and Luo 03] : Discrete flow, existence of solutions, criteria, fast convergence 59
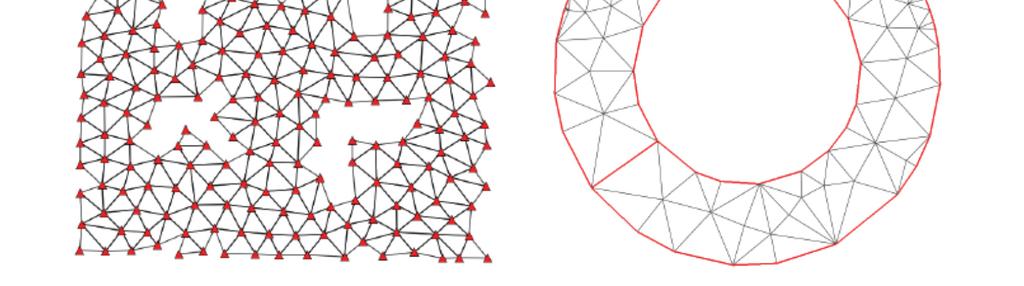
60 Ricci Flow in Sensor Networks Build a triangulation from network graph Requirement: triangulation of a 2D manifold Compute virtual coordinates Apply distributed Ricci flow algorithm to compute edge lengths d(u, v) with the target curvature (0 at interior vertices and 2π/ B at boundary vertices B) Calculate the virtual coordinates with the edge lengths d(u, v) 60
61 Ricci Flow in Sensor Networks Ricci flow is a distributed algorithm Each node modifies its own circle radius. Compute virtual coordinates Start from an arbitrary triangle Iteratively flatten the graph by triangulation. 61


62 Examples 62

63 Experiments and Comparison NoGeo : Fix locations of boundary, replace edges by tight rubber bands : Produces convex holes [Rao, Papadimitriou, Shenker, Stoica Mobicom 03] Does not guarantee delivery: cannot handle concave holes Method Delivery Avg Stretch Max Stretch Ricci Flow 100% NoGeo 83.66%
64 Convergence rate Curvature error bound Ricci flow step size Iterations Vs Number of Nodes 64
65 Theoretical guarantee of delivery Theoretically, Ricci flow is a numerical algorithm. Triangles can be skinny. Route on edges/triangles. Experimentally, Low stretch What about load balancing? 65
66 66
67 Center gets overloaded A simple case: disk shape network. greedy routing (send to neighbor closer to dest) Shortest path routing Uniform traffic: All pairs of node have 1 message. Center load is high! 67

68 Soln#2: Reduce center load, lift to a sphere Greedy routing on a sphere has perfect uniform traffic load 68
69 Reduce center load: map to sphere Koebe-Andreev-Thurston Theorem: Any 3-connected graph can be embedded as a convex polyhedron Circle packing with circles on vertices. all edges are tangent to a unit sphere. vertices are lifted from the sphere. 69
![Polyhedron Routing [Papadimitriou & Ratajczak] Greedy routing with d(u, v)= c(u) c(v)](/docs-images/95/125299537/images/70-0.jpg "guarantees delivery. 3D coordinates of v Route along the surface of a convex polytope.")
70 Polyhedron Routing [Papadimitriou & Ratajczak] Greedy routing with d(u, v)= c(u) c(v) guarantees delivery. 3D coordinates of v Route along the surface of a convex polytope. 70

![[INFOCOM 12] Sensors monitoring](/docs-images/95/125299537/images/71-1.jpg "complex tunnels.")
71 More recent work Extension to 3D sensor networks. [INFOCOM 12] Sensors monitoring complex tunnels. Embed & route on a high-genus surface 71


72 More recent work Space-filling curves with progressive density for non-simple domains. [Infocom 13] App: data mule planning 72
Greedy Routing with Guaranteed Delivery Using Ricci Flow
 Greedy Routing with Guaranteed Delivery Using Ricci Flow Jie Gao Stony Brook University Joint work with Rik Sarkar, Xiaotian Yin, Wei Zeng, Feng Luo, Xianfeng David Gu Greedy Routing Assign coordinatesto
Greedy Routing with Guaranteed Delivery Using Ricci Flow Jie Gao Stony Brook University Joint work with Rik Sarkar, Xiaotian Yin, Wei Zeng, Feng Luo, Xianfeng David Gu Greedy Routing Assign coordinatesto
Geometry in Wireless Sensor Networks
 How cancomputational Geometry help Mobile Networks: Geometry in Wireless Sensor Networks Jie Gao Stony Brook University CG Week 2012 Algorithms in the Field Workshop 2013/6/21 1 A generic sensor node CPU.
How cancomputational Geometry help Mobile Networks: Geometry in Wireless Sensor Networks Jie Gao Stony Brook University CG Week 2012 Algorithms in the Field Workshop 2013/6/21 1 A generic sensor node CPU.
Exploration of Path Space using Sensor Network Geometry
 Exploration of Path Space using Sensor Network Geometry Ruirui Jiang, Xiaomeng Ban Computer Science Stony Brook University {jiang,xban}@cs.sunysb.edu Mayank Goswami Applied Math & Statistics Stony Brook
Exploration of Path Space using Sensor Network Geometry Ruirui Jiang, Xiaomeng Ban Computer Science Stony Brook University {jiang,xban}@cs.sunysb.edu Mayank Goswami Applied Math & Statistics Stony Brook
DISCRETE DIFFERENTIAL GEOMETRY
 AMS SHORT COURSE DISCRETE DIFFERENTIAL GEOMETRY Joint Mathematics Meeting San Diego, CA January 2018 DISCRETE CONFORMAL GEOMETRY AMS SHORT COURSE DISCRETE DIFFERENTIAL GEOMETRY Joint Mathematics Meeting
AMS SHORT COURSE DISCRETE DIFFERENTIAL GEOMETRY Joint Mathematics Meeting San Diego, CA January 2018 DISCRETE CONFORMAL GEOMETRY AMS SHORT COURSE DISCRETE DIFFERENTIAL GEOMETRY Joint Mathematics Meeting
We noticed that the trouble is due to face routing. Can we ignore the real coordinates and use virtual coordinates for routing?
 Geographical routing in practice We noticed that the trouble is due to face routing. Is greedy routing robust to localization noise? Can we ignore the real coordinates and use virtual coordinates for routing?
Geographical routing in practice We noticed that the trouble is due to face routing. Is greedy routing robust to localization noise? Can we ignore the real coordinates and use virtual coordinates for routing?
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
Differential Geometry: Circle Packings. [A Circle Packing Algorithm, Collins and Stephenson] [CirclePack, Ken Stephenson]
![Differential Geometry: Circle Packings. [A Circle Packing Algorithm, Collins and Stephenson] [CirclePack, Ken Stephenson]](/thumbs/85/92091407.jpg "Differential Geometry: Circle Packings. [A Circle Packing Algorithm, Collins and Stephenson] [CirclePack, Ken Stephenson]") Differential Geometry: Circle Packings [A Circle Packing Algorithm, Collins and Stephenson] [CirclePack, Ken Stephenson] Conformal Maps Recall: Given a domain Ω R 2, the map F:Ω R 2 is conformal if it
Differential Geometry: Circle Packings [A Circle Packing Algorithm, Collins and Stephenson] [CirclePack, Ken Stephenson] Conformal Maps Recall: Given a domain Ω R 2, the map F:Ω R 2 is conformal if it
Reversible Hyperbolic Triangulations
 Reversible Hyperbolic Triangulations Circle Packing and Random Walk Tom Hutchcroft 1 Joint work with O. Angel 1, A. Nachmias 1 and G. Ray 2 1 University of British Columbia 2 University of Cambridge Probability
Reversible Hyperbolic Triangulations Circle Packing and Random Walk Tom Hutchcroft 1 Joint work with O. Angel 1, A. Nachmias 1 and G. Ray 2 1 University of British Columbia 2 University of Cambridge Probability
274 Curves on Surfaces, Lecture 5
 274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
[Kleinberg04] J. Kleinberg, A. Slivkins, T. Wexler. Triangulation and Embedding using Small Sets of Beacons. Proc. 45th IEEE Symposium on Foundations
![[Kleinberg04] J. Kleinberg, A. Slivkins, T. Wexler. Triangulation and Embedding using Small Sets of Beacons. Proc. 45th IEEE Symposium on Foundations](/thumbs/96/126993271.jpg "[Kleinberg04] J. Kleinberg, A. Slivkins, T. Wexler. Triangulation and Embedding using Small Sets of Beacons. Proc. 45th IEEE Symposium on Foundations") Landmark-based routing Landmark-based routing [Kleinberg04] J. Kleinberg, A. Slivkins, T. Wexler. Triangulation and Embedding using Small Sets of Beacons. Proc. 45th IEEE Symposium on Foundations of Computer
Landmark-based routing Landmark-based routing [Kleinberg04] J. Kleinberg, A. Slivkins, T. Wexler. Triangulation and Embedding using Small Sets of Beacons. Proc. 45th IEEE Symposium on Foundations of Computer
Given a graph, find an embedding s.t. greedy routing works
 Given a graph, find an embedding s.t. greedy routing works Greedy embedding of a graph 99 Greedy embedding Given a graph G, find an embedding of the vertices in R d, s.t. for each pair of nodes s, t, there
Given a graph, find an embedding s.t. greedy routing works Greedy embedding of a graph 99 Greedy embedding Given a graph G, find an embedding of the vertices in R d, s.t. for each pair of nodes s, t, there
Optimal Möbius Transformation for Information Visualization and Meshing
 Optimal Möbius Transformation for Information Visualization and Meshing Marshall Bern Xerox Palo Alto Research Ctr. David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science
Optimal Möbius Transformation for Information Visualization and Meshing Marshall Bern Xerox Palo Alto Research Ctr. David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science
Random walks on random planar triangulations via the circle packing theorem
 via the circle packing theorem Tel-Aviv University Mini-school on Random Maps and the Gaussian Free Field, ENS Lyon, May 15th 2017 Basic terminology Planar map: a graph embedded in R 2 so that vertices
via the circle packing theorem Tel-Aviv University Mini-school on Random Maps and the Gaussian Free Field, ENS Lyon, May 15th 2017 Basic terminology Planar map: a graph embedded in R 2 so that vertices
Landmark-based routing
 Landmark-based routing [Kleinberg04] J. Kleinberg, A. Slivkins, T. Wexler. Triangulation and Embedding using Small Sets of Beacons. Proc. 45th IEEE Symposium on Foundations of Computer Science, 2004. Using
Landmark-based routing [Kleinberg04] J. Kleinberg, A. Slivkins, T. Wexler. Triangulation and Embedding using Small Sets of Beacons. Proc. 45th IEEE Symposium on Foundations of Computer Science, 2004. Using
Simulations of the quadrilateral-based localization
 Simulations of the quadrilateral-based localization Cluster success rate v.s. node degree. Each plot represents a simulation run. 9/15/05 Jie Gao CSE590-fall05 1 Random deployment Poisson distribution
Simulations of the quadrilateral-based localization Cluster success rate v.s. node degree. Each plot represents a simulation run. 9/15/05 Jie Gao CSE590-fall05 1 Random deployment Poisson distribution
Curvature Berkeley Math Circle January 08, 2013
 Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
Simplicial Hyperbolic Surfaces
 Simplicial Hyperbolic Surfaces Talk by Ken Bromberg August 21, 2007 1-Lipschitz Surfaces- In this lecture we will discuss geometrically meaningful ways of mapping a surface S into a hyperbolic manifold
Simplicial Hyperbolic Surfaces Talk by Ken Bromberg August 21, 2007 1-Lipschitz Surfaces- In this lecture we will discuss geometrically meaningful ways of mapping a surface S into a hyperbolic manifold
Resilient Routing for Sensor Networks Using Hyperbolic Embedding of Universal Covering Space
 Resilient Routing for Sensor Networks Using Hyperbolic Embedding of Universal Covering Space Wei Zeng Rik Sarkar Feng Luo Xianfeng Gu Jie Gao Department of Computer Science, State University of New York
Resilient Routing for Sensor Networks Using Hyperbolic Embedding of Universal Covering Space Wei Zeng Rik Sarkar Feng Luo Xianfeng Gu Jie Gao Department of Computer Science, State University of New York
Geometrization and the Poincaré conjecture
 Geometrization and the Poincaré conjecture Jan Metzger BRIGFOS, 2008 History of the Poincaré conjecture In 1904 Poincaré formulated his conjecture. It is a statement about three dimensional geometric objects,
Geometrization and the Poincaré conjecture Jan Metzger BRIGFOS, 2008 History of the Poincaré conjecture In 1904 Poincaré formulated his conjecture. It is a statement about three dimensional geometric objects,
Digital Geometry Processing Parameterization I
 Problem Definition Given a surface (mesh) S in R 3 and a domain find a bective F: S Typical Domains Cutting to a Disk disk = genus zero + boundary sphere = closed genus zero Creates artificial boundary
Problem Definition Given a surface (mesh) S in R 3 and a domain find a bective F: S Typical Domains Cutting to a Disk disk = genus zero + boundary sphere = closed genus zero Creates artificial boundary
Realizing Planar Graphs as Convex Polytopes. Günter Rote Freie Universität Berlin
 Realizing Planar Graphs as Convex Polytopes Günter Rote Freie Universität Berlin General Problem Statement GIVEN: a combinatorial type of 3-dimensional polytope (a 3-connected planar graph) [ + additional
Realizing Planar Graphs as Convex Polytopes Günter Rote Freie Universität Berlin General Problem Statement GIVEN: a combinatorial type of 3-dimensional polytope (a 3-connected planar graph) [ + additional
Geometric Modeling Mortenson Chapter 11. Complex Model Construction
 Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
Mathematical Research Letters 1, (1994) MÖBIUS CONE STRUCTURES ON 3-DIMENSIONAL MANIFOLDS. Feng Luo
 MÖBIUS CONE STRUCTURES ON 3-DIMENSIONAL MANIFOLDS. Feng Luo") Mathematical Research Letters 1, 257 261 (1994) MÖBIUS CONE STRUCTURES ON 3-DIMENSIONAL MANIFOLDS Feng Luo Abstract. We show that for any given angle α (0, 2π), any closed 3- manifold has a Möbius cone
Mathematical Research Letters 1, 257 261 (1994) MÖBIUS CONE STRUCTURES ON 3-DIMENSIONAL MANIFOLDS Feng Luo Abstract. We show that for any given angle α (0, 2π), any closed 3- manifold has a Möbius cone
(Discrete) Differential Geometry
 Differential Geometry") (Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
(Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
05 - Surfaces. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Daniele Panozzo
 05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
Three Points Make a Triangle Or a Circle
 Three Points Make a Triangle Or a Circle Peter Schröder joint work with Liliya Kharevych, Boris Springborn, Alexander Bobenko 1 In This Section Circles as basic primitive it s all about the underlying
Three Points Make a Triangle Or a Circle Peter Schröder joint work with Liliya Kharevych, Boris Springborn, Alexander Bobenko 1 In This Section Circles as basic primitive it s all about the underlying
Topological Data Analysis - I. Afra Zomorodian Department of Computer Science Dartmouth College
 Topological Data Analysis - I Afra Zomorodian Department of Computer Science Dartmouth College September 3, 2007 1 Acquisition Vision: Images (2D) GIS: Terrains (3D) Graphics: Surfaces (3D) Medicine: MRI
Topological Data Analysis - I Afra Zomorodian Department of Computer Science Dartmouth College September 3, 2007 1 Acquisition Vision: Images (2D) GIS: Terrains (3D) Graphics: Surfaces (3D) Medicine: MRI
CAT(0)-spaces. Münster, June 22, 2004
-spaces. Münster, June 22, 2004") CAT(0)-spaces Münster, June 22, 2004 CAT(0)-space is a term invented by Gromov. Also, called Hadamard space. Roughly, a space which is nonpositively curved and simply connected. C = Comparison or Cartan
CAT(0)-spaces Münster, June 22, 2004 CAT(0)-space is a term invented by Gromov. Also, called Hadamard space. Roughly, a space which is nonpositively curved and simply connected. C = Comparison or Cartan
Lectures in Discrete Differential Geometry 3 Discrete Surfaces
 Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Joint Mathematics Meetings 2014
 Joint Mathematics Meetings 2014 Patterns with Color Symmetry on Triply Periodic Polyhedra Douglas Dunham University of Minnesota Duluth Duluth, Minnesota USA Outline Background Triply periodic polyhedra
Joint Mathematics Meetings 2014 Patterns with Color Symmetry on Triply Periodic Polyhedra Douglas Dunham University of Minnesota Duluth Duluth, Minnesota USA Outline Background Triply periodic polyhedra
Divided-and-Conquer for Voronoi Diagrams Revisited. Supervisor: Ben Galehouse Presenter: Xiaoqi Cao
 Divided-and-Conquer for Voronoi Diagrams Revisited Supervisor: Ben Galehouse Presenter: Xiaoqi Cao Outline Introduction Generalized Voronoi Diagram Algorithm for building generalized Voronoi Diagram Applications
Divided-and-Conquer for Voronoi Diagrams Revisited Supervisor: Ben Galehouse Presenter: Xiaoqi Cao Outline Introduction Generalized Voronoi Diagram Algorithm for building generalized Voronoi Diagram Applications
GLIDER: Gradient Landmark-Based Distributed Routing for Sensor Networks. Stanford University. HP Labs
 GLIDER: Gradient Landmark-Based Distributed Routing for Sensor Networks Qing Fang Jie Gao Leonidas J. Guibas Vin de Silva Li Zhang Stanford University HP Labs Point-to-Point Routing in Sensornets Routing
GLIDER: Gradient Landmark-Based Distributed Routing for Sensor Networks Qing Fang Jie Gao Leonidas J. Guibas Vin de Silva Li Zhang Stanford University HP Labs Point-to-Point Routing in Sensornets Routing
GPS-Free Greedy Routing with Delivery Guarantee and Low Stretch Factor on 2D and 3D Surfaces
 GPS-Free Greedy Routing with Delivery Guarantee and Low Stretch Factor on 2D and 3D Surfaces Su Xia, Hongyi Wu, and Miao Jin Abstract This paper focuses on greedy routing in wireless networks deployed
GPS-Free Greedy Routing with Delivery Guarantee and Low Stretch Factor on 2D and 3D Surfaces Su Xia, Hongyi Wu, and Miao Jin Abstract This paper focuses on greedy routing in wireless networks deployed
Fractional Cascading in Wireless. Jie Gao Computer Science Department Stony Brook University
 Fractional Cascading in Wireless Sensor Networks Jie Gao Computer Science Department Stony Brook University 1 Sensor Networks Large number of small devices for environment monitoring 2 My recent work Lightweight,
Fractional Cascading in Wireless Sensor Networks Jie Gao Computer Science Department Stony Brook University 1 Sensor Networks Large number of small devices for environment monitoring 2 My recent work Lightweight,
Discrete Surface Ricci Flow
 TO APPEAR IN IEEE TVCG 1 Discrete Surface Ricci Flow Miao Jin 1, Junho Kim 1,3,FengLuo 2, and Xianfeng Gu 1 1 Stony Brook University 2 Rutgers University 3 Dong-Eui University Abstract This work introduces
TO APPEAR IN IEEE TVCG 1 Discrete Surface Ricci Flow Miao Jin 1, Junho Kim 1,3,FengLuo 2, and Xianfeng Gu 1 1 Stony Brook University 2 Rutgers University 3 Dong-Eui University Abstract This work introduces
Parallel Computation of Spherical Parameterizations for Mesh Analysis. Th. Athanasiadis and I. Fudos University of Ioannina, Greece
 Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces
 MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia
 Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia 2008 1 Non-Convex Non Convex Boundary Convex boundary creates significant distortion Free boundary is better 2 Fixed
Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia 2008 1 Non-Convex Non Convex Boundary Convex boundary creates significant distortion Free boundary is better 2 Fixed
CS 177 Homework 1. Julian Panetta. October 22, We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F:
 CS 177 Homework 1 Julian Panetta October, 009 1 Euler Characteristic 1.1 Polyhedral Formula We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F: V E + F = 1 First,
CS 177 Homework 1 Julian Panetta October, 009 1 Euler Characteristic 1.1 Polyhedral Formula We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F: V E + F = 1 First,
Parameterization with Manifolds
 Parameterization with Manifolds Manifold What they are Why they re difficult to use When a mesh isn t good enough Problem areas besides surface models A simple manifold Sphere, torus, plane, etc. Using
Parameterization with Manifolds Manifold What they are Why they re difficult to use When a mesh isn t good enough Problem areas besides surface models A simple manifold Sphere, torus, plane, etc. Using
Geometric structures on manifolds
 CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
Euler s Theorem. Brett Chenoweth. February 26, 2013
 Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
What would you see if you live on a flat torus? What is the relationship between it and a room with 2 mirrors?
 DAY I Activity I: What is the sum of the angles of a triangle? How can you show it? How about a quadrilateral (a shape with 4 sides)? A pentagon (a shape with 5 sides)? Can you find the sum of their angles
DAY I Activity I: What is the sum of the angles of a triangle? How can you show it? How about a quadrilateral (a shape with 4 sides)? A pentagon (a shape with 5 sides)? Can you find the sum of their angles
Discrete differential geometry: Surfaces made from Circles
 Discrete differential geometry: Alexander Bobenko (TU Berlin) with help of Tim Hoffmann, Boris Springborn, Ulrich Pinkall, Ulrike Scheerer, Daniel Matthes, Yuri Suris, Kevin Bauer Papers A.I. Bobenko,
Discrete differential geometry: Alexander Bobenko (TU Berlin) with help of Tim Hoffmann, Boris Springborn, Ulrich Pinkall, Ulrike Scheerer, Daniel Matthes, Yuri Suris, Kevin Bauer Papers A.I. Bobenko,
A Flavor of Topology. Shireen Elhabian and Aly A. Farag University of Louisville January 2010
 A Flavor of Topology Shireen Elhabian and Aly A. Farag University of Louisville January 2010 In 1670 s I believe that we need another analysis properly geometric or linear, which treats place directly
A Flavor of Topology Shireen Elhabian and Aly A. Farag University of Louisville January 2010 In 1670 s I believe that we need another analysis properly geometric or linear, which treats place directly
Chapter 4 Concepts from Geometry
 Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
3.3 Interpolation of rotations represented by quaternions
 3 S 3.3 Interpolation of rotations represented by quaternions : set of unit quaternions ; S :set of unit 3D vectors Interpolation will be performed on 3 S (direct linear interpolation produces nonlinear
3 S 3.3 Interpolation of rotations represented by quaternions : set of unit quaternions ; S :set of unit 3D vectors Interpolation will be performed on 3 S (direct linear interpolation produces nonlinear
THE UNIFORMIZATION THEOREM AND UNIVERSAL COVERS
 THE UNIFORMIZATION THEOREM AND UNIVERSAL COVERS PETAR YANAKIEV Abstract. This paper will deal with the consequences of the Uniformization Theorem, which is a major result in complex analysis and differential
THE UNIFORMIZATION THEOREM AND UNIVERSAL COVERS PETAR YANAKIEV Abstract. This paper will deal with the consequences of the Uniformization Theorem, which is a major result in complex analysis and differential
3D Hyperbolic Tiling and Horosphere Cross Section
 3D Hyperbolic Tiling and Horosphere Cross Section Vladimir Bulatov, Shapeways Joint AMS/MAA meeting San Diego, January 10, 2018 Inversive Geometry Convenient container to work with 3 dimensional hyperbolic
3D Hyperbolic Tiling and Horosphere Cross Section Vladimir Bulatov, Shapeways Joint AMS/MAA meeting San Diego, January 10, 2018 Inversive Geometry Convenient container to work with 3 dimensional hyperbolic
Networks: A Deterministic Approach with Constant Overhead
 Trace-Routing in 3D Wireless Sensor Networks: A Deterministic Approach with Constant Overhead Su Xia, Hongyi Wu, and Miao Jin! School of Computing and Informatics! University of Louisiana at Lafayette
Trace-Routing in 3D Wireless Sensor Networks: A Deterministic Approach with Constant Overhead Su Xia, Hongyi Wu, and Miao Jin! School of Computing and Informatics! University of Louisiana at Lafayette
Planar Graphs. 1 Graphs and maps. 1.1 Planarity and duality
 Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Möbius Transformations in Scientific Computing. David Eppstein
 Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
THE DNA INEQUALITY POWER ROUND
 THE DNA INEQUALITY POWER ROUND Instructions Write/draw all solutions neatly, with at most one question per page, clearly numbered. Turn in the solutions in numerical order, with your team name at the upper
THE DNA INEQUALITY POWER ROUND Instructions Write/draw all solutions neatly, with at most one question per page, clearly numbered. Turn in the solutions in numerical order, with your team name at the upper
Convex Hulls (3D) O Rourke, Chapter 4
 O Rourke, Chapter 4") Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]
![Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]](/thumbs/93/111713975.jpg "Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]") Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Manifold Learning Theory and Applications
 Manifold Learning Theory and Applications Yunqian Ma and Yun Fu CRC Press Taylor Si Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Group, an informa business Contents
Manifold Learning Theory and Applications Yunqian Ma and Yun Fu CRC Press Taylor Si Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Group, an informa business Contents
Globally Optimal Surface Mapping for Surfaces with Arbitrary Topology
 1 Globally Optimal Surface Mapping for Surfaces with Arbitrary Topology Xin Li, Yunfan Bao, Xiaohu Guo, Miao Jin, Xianfeng Gu, and Hong Qin Abstract Computing smooth and optimal one-to-one maps between
1 Globally Optimal Surface Mapping for Surfaces with Arbitrary Topology Xin Li, Yunfan Bao, Xiaohu Guo, Miao Jin, Xianfeng Gu, and Hong Qin Abstract Computing smooth and optimal one-to-one maps between
CONFORMAL SPHERICAL PARAMETRIZATION FOR HIGH GENUS SURFACES
 COMMUNICATIONS IN INFORMATION AND SYSTEMS c 2007 International Press Vol. 7, No. 3, pp. 273-286, 2007 004 CONFORMAL SPHERICAL PARAMETRIZATION FOR HIGH GENUS SURFACES WEI ZENG, XIN LI, SHING-TUNG YAU, AND
COMMUNICATIONS IN INFORMATION AND SYSTEMS c 2007 International Press Vol. 7, No. 3, pp. 273-286, 2007 004 CONFORMAL SPHERICAL PARAMETRIZATION FOR HIGH GENUS SURFACES WEI ZENG, XIN LI, SHING-TUNG YAU, AND
6.3 Poincare's Theorem
 Figure 6.5: The second cut. for some g 0. 6.3 Poincare's Theorem Theorem 6.3.1 (Poincare). Let D be a polygon diagram drawn in the hyperbolic plane such that the lengths of its edges and the interior angles
Figure 6.5: The second cut. for some g 0. 6.3 Poincare's Theorem Theorem 6.3.1 (Poincare). Let D be a polygon diagram drawn in the hyperbolic plane such that the lengths of its edges and the interior angles
Hyperbolic Structures from Ideal Triangulations
 Hyperbolic Structures from Ideal Triangulations Craig Hodgson University of Melbourne Geometric structures on 3-manifolds Thurston s idea: We would like to find geometric structures (or metrics) on 3-manifolds
Hyperbolic Structures from Ideal Triangulations Craig Hodgson University of Melbourne Geometric structures on 3-manifolds Thurston s idea: We would like to find geometric structures (or metrics) on 3-manifolds
Optics II. Reflection and Mirrors
 Optics II Reflection and Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media The
Optics II Reflection and Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media The
The World Is Not Flat: An Introduction to Modern Geometry
 The World Is Not Flat: An to The University of Iowa September 15, 2015 The story of a hunting party The story of a hunting party What color was the bear? The story of a hunting party Overview Gauss and
The World Is Not Flat: An to The University of Iowa September 15, 2015 The story of a hunting party The story of a hunting party What color was the bear? The story of a hunting party Overview Gauss and
Cut Graph Based Information Storage and Retrieval in 3D Sensor Networks with General Topology
 213 Proceedings IEEE INFOCOM Cut Graph Based Information Storage and Retrieval in 3D Sensor Networks with General Topology Yang Yang, Miao Jin, Yao Zhao, and Hongyi Wu Abstract We address the problem of
213 Proceedings IEEE INFOCOM Cut Graph Based Information Storage and Retrieval in 3D Sensor Networks with General Topology Yang Yang, Miao Jin, Yao Zhao, and Hongyi Wu Abstract We address the problem of
Bending Circle Limits
 Proceedings of Bridges 2013: Mathematics, Music, Art, Architecture, Culture Bending Circle Limits Vladimir Bulatov Corvallis Oregon, USA info@bulatov.org Abstract M.C.Escher s hyperbolic tessellations
Proceedings of Bridges 2013: Mathematics, Music, Art, Architecture, Culture Bending Circle Limits Vladimir Bulatov Corvallis Oregon, USA info@bulatov.org Abstract M.C.Escher s hyperbolic tessellations
Topological Data Processing for Distributed Sensor Networks with Morse-Smale Decomposition
 Topological Data Processing for Distributed Sensor Networks with Morse-Smale Decomposition Xianjin Zhu Rik Sarkar Jie Gao Department of Computer Science, Stony Brook University. {xjzhu, rik, jgao}@cs.sunysb.edu
Topological Data Processing for Distributed Sensor Networks with Morse-Smale Decomposition Xianjin Zhu Rik Sarkar Jie Gao Department of Computer Science, Stony Brook University. {xjzhu, rik, jgao}@cs.sunysb.edu
Discrete Surfaces. David Gu. Tsinghua University. Tsinghua University. 1 Mathematics Science Center
 Discrete Surfaces 1 1 Mathematics Science Center Tsinghua University Tsinghua University Discrete Surface Discrete Surfaces Acquired using 3D scanner. Discrete Surfaces Our group has developed high speed
Discrete Surfaces 1 1 Mathematics Science Center Tsinghua University Tsinghua University Discrete Surface Discrete Surfaces Acquired using 3D scanner. Discrete Surfaces Our group has developed high speed
Topological Issues in Hexahedral Meshing
 Topological Issues in Hexahedral Meshing David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science Outline I. What is meshing? Problem statement Types of mesh Quality issues
Topological Issues in Hexahedral Meshing David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science Outline I. What is meshing? Problem statement Types of mesh Quality issues
Applications. Oversampled 3D scan data. ~150k triangles ~80k triangles
 Mesh Simplification Applications Oversampled 3D scan data ~150k triangles ~80k triangles 2 Applications Overtessellation: E.g. iso-surface extraction 3 Applications Multi-resolution hierarchies for efficient
Mesh Simplification Applications Oversampled 3D scan data ~150k triangles ~80k triangles 2 Applications Overtessellation: E.g. iso-surface extraction 3 Applications Multi-resolution hierarchies for efficient
The Construction of a Hyperbolic 4-Manifold with a Single Cusp, Following Kolpakov and Martelli. Christopher Abram
 The Construction of a Hyperbolic 4-Manifold with a Single Cusp, Following Kolpakov and Martelli by Christopher Abram A Thesis Presented in Partial Fulfillment of the Requirement for the Degree Master of
The Construction of a Hyperbolic 4-Manifold with a Single Cusp, Following Kolpakov and Martelli by Christopher Abram A Thesis Presented in Partial Fulfillment of the Requirement for the Degree Master of
Manifold T-spline. Ying He 1 Kexiang Wang 2 Hongyu Wang 2 Xianfeng David Gu 2 Hong Qin 2. Geometric Modeling and Processing 2006
 Ying He 1 Kexiang Wang 2 Hongyu Wang 2 Xianfeng David Gu 2 Hong Qin 2 1 School of Computer Engineering Nanyang Technological University, Singapore 2 Center for Visual Computing (CVC) Stony Brook University,
Ying He 1 Kexiang Wang 2 Hongyu Wang 2 Xianfeng David Gu 2 Hong Qin 2 1 School of Computer Engineering Nanyang Technological University, Singapore 2 Center for Visual Computing (CVC) Stony Brook University,
Triangles and Squares David Eppstein, ICS Theory Group, April 20, 2001
 Triangles and Squares David Eppstein, ICS Theory Group, April 20, 2001 Which unit-side-length convex polygons can be formed by packing together unit squares and unit equilateral triangles? For instance
Triangles and Squares David Eppstein, ICS Theory Group, April 20, 2001 Which unit-side-length convex polygons can be formed by packing together unit squares and unit equilateral triangles? For instance
Multi-Scale Free-Form Surface Description
 Multi-Scale Free-Form Surface Description Farzin Mokhtarian, Nasser Khalili and Peter Yuen Centre for Vision Speech and Signal Processing Dept. of Electronic and Electrical Engineering University of Surrey,
Multi-Scale Free-Form Surface Description Farzin Mokhtarian, Nasser Khalili and Peter Yuen Centre for Vision Speech and Signal Processing Dept. of Electronic and Electrical Engineering University of Surrey,
Geometric structures on manifolds
 CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
Computational Conformal Geometry and Its Applications
 Computational Conformal Geometry and Its Applications Wei Zeng Institute of Computing Technology Chinese Academy of Sciences zengwei@cs.sunysb.edu Thesis Proposal Advisor: Harry Shum Co-advisor: Xianfeng
Computational Conformal Geometry and Its Applications Wei Zeng Institute of Computing Technology Chinese Academy of Sciences zengwei@cs.sunysb.edu Thesis Proposal Advisor: Harry Shum Co-advisor: Xianfeng
arxiv: v1 [cs.ni] 28 Apr 2015
![arxiv: v1 [cs.ni] 28 Apr 2015](/thumbs/94/119573179.jpg "arxiv: v1 [cs.ni] 28 Apr 2015") Succint greedy routing without metric on planar triangulations Pierre Leone, Kasun Samarasinghe Computer Science Department, University of Geneva, Battelle A, route de Drize 7, 1227 Carouge, Switzerland
Succint greedy routing without metric on planar triangulations Pierre Leone, Kasun Samarasinghe Computer Science Department, University of Geneva, Battelle A, route de Drize 7, 1227 Carouge, Switzerland
Geometric Algorithms for Sensor Networks
 Geometric Algorithms for Sensor Networks Jie Gao Leonidas Guibas June 7, 2011 1 Introduction Networked embedded sensors provide a unique opportunity for real time, large scale, high resolution environmental
Geometric Algorithms for Sensor Networks Jie Gao Leonidas Guibas June 7, 2011 1 Introduction Networked embedded sensors provide a unique opportunity for real time, large scale, high resolution environmental
In this lecture we introduce the Gauss-Bonnet theorem. The required section is The optional sections are
 Math 348 Fall 2017 Lectures 20: The Gauss-Bonnet Theorem II Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams.
Math 348 Fall 2017 Lectures 20: The Gauss-Bonnet Theorem II Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams.
Lectures 19: The Gauss-Bonnet Theorem I. Table of contents
 Math 348 Fall 07 Lectures 9: The Gauss-Bonnet Theorem I Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams. In
Math 348 Fall 07 Lectures 9: The Gauss-Bonnet Theorem I Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams. In
Geometry of Flat Surfaces
 Geometry of Flat Surfaces Marcelo iana IMPA - Rio de Janeiro Xi an Jiaotong University 2005 Geometry of Flat Surfaces p.1/43 Some (non-flat) surfaces Sphere (g = 0) Torus (g = 1) Bitorus (g = 2) Geometry
Geometry of Flat Surfaces Marcelo iana IMPA - Rio de Janeiro Xi an Jiaotong University 2005 Geometry of Flat Surfaces p.1/43 Some (non-flat) surfaces Sphere (g = 0) Torus (g = 1) Bitorus (g = 2) Geometry
3D Wireless Sensor Networks: Challenges and Solutions
 3D Wireless Sensor Networks: Challenges and Solutions Hongyi Wu Old Dominion University Ph.D., CSE, UB, 2002 This work is partially supported by NSF CNS-1018306 and CNS-1320931. 2D PLANE, 3D VOLUME, AND
3D Wireless Sensor Networks: Challenges and Solutions Hongyi Wu Old Dominion University Ph.D., CSE, UB, 2002 This work is partially supported by NSF CNS-1018306 and CNS-1320931. 2D PLANE, 3D VOLUME, AND
Rubber bands. Chapter Rubber band representation
 Chapter 1 Rubber bands In the previous chapter, we already used the idea of looking at the graph geometrically, by placing its nodes on the line and replacing the edges by rubber bands. Since, however,
Chapter 1 Rubber bands In the previous chapter, we already used the idea of looking at the graph geometrically, by placing its nodes on the line and replacing the edges by rubber bands. Since, however,
Parameterization of Triangular Meshes with Virtual Boundaries
 Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
Aspects of Geometry. Finite models of the projective plane and coordinates
 Review Sheet There will be an exam on Thursday, February 14. The exam will cover topics up through material from projective geometry through Day 3 of the DIY Hyperbolic geometry packet. Below are some
Review Sheet There will be an exam on Thursday, February 14. The exam will cover topics up through material from projective geometry through Day 3 of the DIY Hyperbolic geometry packet. Below are some
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
Voronoi Diagram. Xiao-Ming Fu
 Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Research in Computational Differential Geomet
 Research in Computational Differential Geometry November 5, 2014 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. Approximations Often
Research in Computational Differential Geometry November 5, 2014 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. Approximations Often
EXPERIENCING GEOMETRY
 EXPERIENCING GEOMETRY EUCLIDEAN AND NON-EUCLIDEAN WITH HISTORY THIRD EDITION David W. Henderson Daina Taimina Cornell University, Ithaca, New York PEARSON Prentice Hall Upper Saddle River, New Jersey 07458
EXPERIENCING GEOMETRY EUCLIDEAN AND NON-EUCLIDEAN WITH HISTORY THIRD EDITION David W. Henderson Daina Taimina Cornell University, Ithaca, New York PEARSON Prentice Hall Upper Saddle River, New Jersey 07458
Module 1 Session 1 HS. Critical Areas for Traditional Geometry Page 1 of 6
 Critical Areas for Traditional Geometry Page 1 of 6 There are six critical areas (units) for Traditional Geometry: Critical Area 1: Congruence, Proof, and Constructions In previous grades, students were
Critical Areas for Traditional Geometry Page 1 of 6 There are six critical areas (units) for Traditional Geometry: Critical Area 1: Congruence, Proof, and Constructions In previous grades, students were
SIMPLICIAL ENERGY AND SIMPLICIAL HARMONIC MAPS
 SIMPLICIAL ENERGY AND SIMPLICIAL HARMONIC MAPS JOEL HASS AND PETER SCOTT Abstract. We introduce a combinatorial energy for maps of triangulated surfaces with simplicial metrics and analyze the existence
SIMPLICIAL ENERGY AND SIMPLICIAL HARMONIC MAPS JOEL HASS AND PETER SCOTT Abstract. We introduce a combinatorial energy for maps of triangulated surfaces with simplicial metrics and analyze the existence
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
Hyplane Polyhedral Models of Hyperbolic Plane
 Original Paper Forma, 21, 5 18, 2006 Hyplane Polyhedral Models of Hyperbolic Plane Kazushi AHARA Department of Mathematics School of Science and Technology, Meiji University, 1-1-1 Higashi-mita, Tama-ku,
Original Paper Forma, 21, 5 18, 2006 Hyplane Polyhedral Models of Hyperbolic Plane Kazushi AHARA Department of Mathematics School of Science and Technology, Meiji University, 1-1-1 Higashi-mita, Tama-ku,
Routing with Guaranteed Delivery on Virtual Coordinates
 Routing with Guaranteed Delivery on Virtual Coordinates The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters. Citation Published Version
Routing with Guaranteed Delivery on Virtual Coordinates The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters. Citation Published Version
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
7. The Gauss-Bonnet theorem
 7. The Gauss-Bonnet theorem 7.1 Hyperbolic polygons In Euclidean geometry, an n-sided polygon is a subset of the Euclidean plane bounded by n straight lines. Thus the edges of a Euclidean polygon are formed
7. The Gauss-Bonnet theorem 7.1 Hyperbolic polygons In Euclidean geometry, an n-sided polygon is a subset of the Euclidean plane bounded by n straight lines. Thus the edges of a Euclidean polygon are formed
GEOMETRY OF PLANAR SURFACES AND EXCEPTIONAL FILLINGS
 GEOMETRY OF PLANAR SURFACES AND EXCEPTIONAL FILLINGS NEIL R. HOFFMAN AND JESSICA S. PURCELL Abstract. If a hyperbolic 3 manifold admits an exceptional Dehn filling, then the length of the slope of that
GEOMETRY OF PLANAR SURFACES AND EXCEPTIONAL FILLINGS NEIL R. HOFFMAN AND JESSICA S. PURCELL Abstract. If a hyperbolic 3 manifold admits an exceptional Dehn filling, then the length of the slope of that
Optimizing triangular meshes to have the incrircle packing property
 Packing Circles and Spheres on Surfaces Ali Mahdavi-Amiri Introduction Optimizing triangular meshes to have p g g the incrircle packing property Our Motivation PYXIS project Geometry Nature Geometry Isoperimetry
Packing Circles and Spheres on Surfaces Ali Mahdavi-Amiri Introduction Optimizing triangular meshes to have p g g the incrircle packing property Our Motivation PYXIS project Geometry Nature Geometry Isoperimetry
Networking Sensors, II
 Networking Sensors, II Sensing Networking Leonidas Guibas Stanford University Computation CS321 ZG Book, Ch. 3 1 Class Administration Paper presentation preferences due today, by class time Project info
Networking Sensors, II Sensing Networking Leonidas Guibas Stanford University Computation CS321 ZG Book, Ch. 3 1 Class Administration Paper presentation preferences due today, by class time Project info
Fast marching methods
 1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
Covering Space for In-Network Sensor Data Storage
 Covering Space for In-Network Sensor Data Storage Rik Sarkar Wei Zeng Jie Gao Xianfeng David Gu Department of Computer Science Stony Brook University Stony Brook, NY 11794 {rik,jgao,gu}@cs.sunysb.edu Department
Covering Space for In-Network Sensor Data Storage Rik Sarkar Wei Zeng Jie Gao Xianfeng David Gu Department of Computer Science Stony Brook University Stony Brook, NY 11794 {rik,jgao,gu}@cs.sunysb.edu Department