Research in Computational Differential Geomet
|
|
|
- Paul Holland
- 6 years ago
- Views:
Transcription
1 Research in Computational Differential Geometry November 5, 2014
2 Approximations Often we have a series of approximations which we think are getting close to looking like some shape.
3 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. For example, pictures at higher and higher resolutions will come close to looking like the real picture.
4 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. For example, pictures at higher and higher resolutions will come close to looking like the real picture. But what do we mean by close to looking like?
5 Approximation of Shapes Consider the following situation:
6 Approximation of Shapes Consider the following situation: Let S 0 be the polygonal path from (0, 0) to (1, 0) to (1, 1).
7 Approximation of Shapes Consider the following situation: Let S 0 be the polygonal path from (0, 0) to (1, 0) to (1, 1). Let S 1 be the polygonal path from (0, 0) to (.5, 0) to (.5,.5) to (1,.5) to (1, 1).
8 Approximation of Shapes Consider the following situation: Let S 0 be the polygonal path from (0, 0) to (1, 0) to (1, 1). Let S 1 be the polygonal path from (0, 0) to (.5, 0) to (.5,.5) to (1,.5) to (1, 1). Generally, let S n be the polygonal path which starts at (0, 0) and moves along segments of length 2 n, alternatively horizontal and vertical, until it reaches (1, 1).
9 Approximation of Shapes Consider the following situation: Let S 0 be the polygonal path from (0, 0) to (1, 0) to (1, 1). Let S 1 be the polygonal path from (0, 0) to (.5, 0) to (.5,.5) to (1,.5) to (1, 1). Generally, let S n be the polygonal path which starts at (0, 0) and moves along segments of length 2 n, alternatively horizontal and vertical, until it reaches (1, 1). As n does S n look like any shape?
10 S 2 and S 4
11 Does S n Look Like anything as n? In some ways the set starts to look like a straight line.
12 Does S n Look Like anything as n? In some ways the set starts to look like a straight line. But in many ways the set is never anything like a straight line.
13 Does S n Look Like anything as n? In some ways the set starts to look like a straight line. But in many ways the set is never anything like a straight line. One way to see this is to compare the lengths:
14 Does S n Look Like anything as n? In some ways the set starts to look like a straight line. But in many ways the set is never anything like a straight line. One way to see this is to compare the lengths: The line would have length 2...
15 Does S n Look Like anything as n? In some ways the set starts to look like a straight line. But in many ways the set is never anything like a straight line. One way to see this is to compare the lengths: The line would have length 2... But the sets S n always have length exactly 2.
16 Not All Approximations the Same So some approximations may maintain certain features, but not others.
17 Not All Approximations the Same So some approximations may maintain certain features, but not others. Let s look at the types of features we may want to maintain.
18 Useful Measurements Lengths
19 Useful Measurements Lengths Areas
20 Useful Measurements Lengths Areas Volumes (etc.)
21 Useful Measurements Lengths Areas Volumes (etc.) Curvatures
22 Useful Measurements Lengths Areas Volumes (etc.) Curvatures Tangent Directions
23 Useful Measurements Lengths Areas Volumes (etc.) Curvatures Tangent Directions Angles
24 Not Useful Measurements The measurements on the previous slides can be found in many cases with derivatives and integrals.
25 Not Useful Measurements The measurements on the previous slides can be found in many cases with derivatives and integrals. But not every derivative or integral leads to a useful calculation about shape.
26 Not Useful Measurements The measurements on the previous slides can be found in many cases with derivatives and integrals. But not every derivative or integral leads to a useful calculation about shape. Ex: The Angular Velocity of a point moving on a Circle may be useful in Physics, but it doesn t tell us anything about the circle.
27 Not Useful Measurements The measurements on the previous slides can be found in many cases with derivatives and integrals. But not every derivative or integral leads to a useful calculation about shape. Ex: The Angular Velocity of a point moving on a Circle may be useful in Physics, but it doesn t tell us anything about the circle. Generally we only care about measurements which are independent of coordinates.
28 Coordinates Coordinates are numbers assigned to points on a shape.
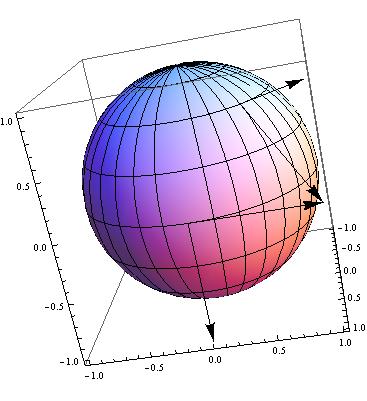
29 Coordinates Coordinates are numbers assigned to points on a shape. For example, the (x, y) coordinates of the plane or longitude and latitude on a sphere.
30 Coordinates Coordinates are numbers assigned to points on a shape. For example, the (x, y) coordinates of the plane or longitude and latitude on a sphere. Coordinates are not necessary for geometry.
31 Coordinates Coordinates are numbers assigned to points on a shape. For example, the (x, y) coordinates of the plane or longitude and latitude on a sphere. Coordinates are not necessary for geometry. But coordinates are practically necessary to use Calculus techniques.
32 Coordinates Coordinates are numbers assigned to points on a shape. For example, the (x, y) coordinates of the plane or longitude and latitude on a sphere. Coordinates are not necessary for geometry. But coordinates are practically necessary to use Calculus techniques. In geometry we prefer coordinates which are intrinsic to the shape.

33 Intrinsic versus Extrinsic Coordinates
34 Manifolds Manifolds are shapes viewed as independent of their surrounding environment.
35 Manifolds Manifolds are shapes viewed as independent of their surrounding environment. For example, a sphere is considered to be a two-dimensional object, since it can be described using only two variables.
36 Manifolds Manifolds are shapes viewed as independent of their surrounding environment. For example, a sphere is considered to be a two-dimensional object, since it can be described using only two variables. All calculations are done on the ground.
37 Tangents in Manifolds Most calculations in differential geometry deal with tangent vectors in some way.
38 Tangents in Manifolds Most calculations in differential geometry deal with tangent vectors in some way. A tangent vector can be thought of as traveling from a certain point on the manifold with a certain velocity.
39 Tangents in Manifolds Most calculations in differential geometry deal with tangent vectors in some way. A tangent vector can be thought of as traveling from a certain point on the manifold with a certain velocity. Thus it is key to remember that in differential geometry, tangents have an initial position
40
41 Local Metrics We would like to calculate lengths, angles, etc. from our coordinates.
42 Local Metrics We would like to calculate lengths, angles, etc. from our coordinates. But in most cases this cannot be done directly from coordinates.
43 Local Metrics We would like to calculate lengths, angles, etc. from our coordinates. But in most cases this cannot be done directly from coordinates. Ex. if think of a sphere as a rectangle in θ and φ, we will guess its area as 2π π = 2π 2, while the actual area is 4π.
44 Local Metrics We would like to calculate lengths, angles, etc. from our coordinates. But in most cases this cannot be done directly from coordinates. Ex. if think of a sphere as a rectangle in θ and φ, we will guess its area as 2π π = 2π 2, while the actual area is 4π. To calculate the correct area, we keep track of local distance.
45 Local Metrics We would like to calculate lengths, angles, etc. from our coordinates. But in most cases this cannot be done directly from coordinates. Ex. if think of a sphere as a rectangle in θ and φ, we will guess its area as 2π π = 2π 2, while the actual area is 4π. To calculate the correct area, we keep track of local distance. This is a change of inner product on tangent vectors.
46 Local Metrics We would like to calculate lengths, angles, etc. from our coordinates. But in most cases this cannot be done directly from coordinates. Ex. if think of a sphere as a rectangle in θ and φ, we will guess its area as 2π π = 2π 2, while the actual area is 4π. To calculate the correct area, we keep track of local distance. This is a change of inner product on tangent vectors. This is used to derive the ds, da, dv terms etc. that you see in Calculus.
47 Metrics Changing the Shape Ex, if we consider the set {(x, y) : x 2 + y 2 < 1}, we can simply apply the normal inner product to the tangent vectors.
48 Metrics Changing the Shape Ex, if we consider the set {(x, y) : x 2 + y 2 < 1}, we can simply apply the normal inner product to the tangent vectors. However, we can also decide to treat the tangent vectors to different points differently, say by scaling the inner product at (a, b) by the term 1 1 a 2 b 2.
49 Metrics Changing the Shape Ex, if we consider the set {(x, y) : x 2 + y 2 < 1}, we can simply apply the normal inner product to the tangent vectors. However, we can also decide to treat the tangent vectors to different points differently, say by scaling the inner product at (a, b) by the term 1 1 a 2 b 2. This changes our notions of lengths, areas, and lines (though angles are similar to before). A change in metric changes the shape.
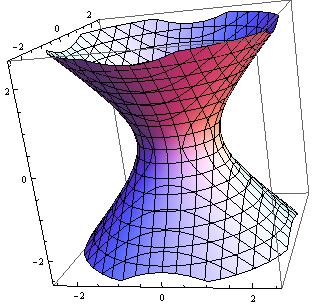
50 Metrics Changing the Shape Ex, if we consider the set {(x, y) : x 2 + y 2 < 1}, we can simply apply the normal inner product to the tangent vectors. However, we can also decide to treat the tangent vectors to different points differently, say by scaling the inner product at (a, b) by the term 1 1 a 2 b 2. This changes our notions of lengths, areas, and lines (though angles are similar to before). A change in metric changes the shape. (A more complicated calculation could show that this is in some complicated sense equivalent to taking distances on a hyperboloid).

51 Comparing Distances
52 Curvature of a Curve At each point we can define a tangent direction (this depends on the way the curve is fit into its surrounding space).
53 Curvature of a Curve At each point we can define a tangent direction (this depends on the way the curve is fit into its surrounding space). If we direct the curve, this defines a unit tangent.
54 Curvature of a Curve At each point we can define a tangent direction (this depends on the way the curve is fit into its surrounding space). If we direct the curve, this defines a unit tangent. We can then differentiate this with respect to arc length.
55 Curvature of a Curve At each point we can define a tangent direction (this depends on the way the curve is fit into its surrounding space). If we direct the curve, this defines a unit tangent. We can then differentiate this with respect to arc length. The length of the resulting vector is then the unsigned curvature at that point.
56 Curvature of a Curve At each point we can define a tangent direction (this depends on the way the curve is fit into its surrounding space). If we direct the curve, this defines a unit tangent. We can then differentiate this with respect to arc length. The length of the resulting vector is then the unsigned curvature at that point. The signed curvature is positive or negative depending on the direction of the curve.
57 Curvature of a Surface At a point, define the lines in various directions from that point.
58 Curvature of a Surface At a point, define the lines in various directions from that point. Find the directions with the greatest and least curvature.
59 Curvature of a Surface At a point, define the lines in various directions from that point. Find the directions with the greatest and least curvature. Multiply these curvatures.
60 Curvature of a Surface At a point, define the lines in various directions from that point. Find the directions with the greatest and least curvature. Multiply these curvatures. This is the Gaussian curvature at this point.
61
62 Topological Invariants Sometimes geometric measures do not captures the shape of the object in the simplest way.
63 Topological Invariants Sometimes geometric measures do not captures the shape of the object in the simplest way. For example, consider the following:
64 Euler Characteristic A simple topological invariant is the Euler characteristic.
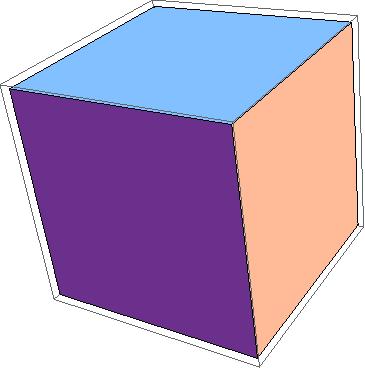
65 Euler Characteristic A simple topological invariant is the Euler characteristic. For a polyhedron, this is V E + F
66 Euler Characteristic A simple topological invariant is the Euler characteristic. For a polyhedron, this is V E + F Any polyhedron without holes has an Euler characteristic of exactly two.
67 Euler Characteristic
68 Betti Numbers Generally Euler Characteristic can be generalized by considering the Betti numbers of a shape.
69 Betti Numbers Generally Euler Characteristic can be generalized by considering the Betti numbers of a shape. The Betti numbers in some way count the k-dimensional holes of a shape.
70 Betti Numbers Generally Euler Characteristic can be generalized by considering the Betti numbers of a shape. The Betti numbers in some way count the k-dimensional holes of a shape. In the previous slide we have b 0 = 1, b 1 = 1.
71 Betti Numbers Generally Euler Characteristic can be generalized by considering the Betti numbers of a shape. The Betti numbers in some way count the k-dimensional holes of a shape. In the previous slide we have b 0 = 1, b 1 = 1. For a torus, b 0 = 1, b 1 = 2, b 2 = 1.
72 Betti Numbers Generally Euler Characteristic can be generalized by considering the Betti numbers of a shape. The Betti numbers in some way count the k-dimensional holes of a shape. In the previous slide we have b 0 = 1, b 1 = 1. For a torus, b 0 = 1, b 1 = 2, b 2 = 1. Generally these are calculated by Homology.
73 Topological Measures The most important topological invariant for geometry is homology. Homology counts the number of holes in various dimensions. Ex. A torus has 4 holes : 1 0-dimensional, 2 1 dimensional, and 1 2-dimensional.
74 The Normal Cycle The Normal Cycle (or Current) is an object which in some way encodes all of the previous measures.
75 The Normal Cycle The Normal Cycle (or Current) is an object which in some way encodes all of the previous measures. An n-current is a generalization of an n-dimensional shape (in the sense that we can integrate n dimensional differential forms over them).
76 The Normal Cycle The Normal Cycle (or Current) is an object which in some way encodes all of the previous measures. An n-current is a generalization of an n-dimensional shape (in the sense that we can integrate n dimensional differential forms over them). By integrating certain forms over the normal cycle you can retrieve the previous information.
77 The Normal Cycle The Normal Cycle (or Current) is an object which in some way encodes all of the previous measures. An n-current is a generalization of an n-dimensional shape (in the sense that we can integrate n dimensional differential forms over them). By integrating certain forms over the normal cycle you can retrieve the previous information. Therefore convergence of normal cycles implies convergence of the previous measures.
78 The Normal Cycle The Normal Cycle (or Current) is an object which in some way encodes all of the previous measures. An n-current is a generalization of an n-dimensional shape (in the sense that we can integrate n dimensional differential forms over them). By integrating certain forms over the normal cycle you can retrieve the previous information. Therefore convergence of normal cycles implies convergence of the previous measures. This is a convenient (but tricky) way to show that an approximation is good.
79 Normal Cycles
80 Ways Approximations can Go Wrong It is not in the scope of this talk to discuss how to approximate correctly
81 Ways Approximations can Go Wrong It is not in the scope of this talk to discuss how to approximate correctly So let s look at ways to approximate incorrectly (or at least imperfectly).
82 Ways Approximations can Go Wrong It is not in the scope of this talk to discuss how to approximate correctly So let s look at ways to approximate incorrectly (or at least imperfectly). Along the way we can talk about possible fixes.
83 Pointwise Convergence, Length Does Not Converge
84 Approximate with secant lines
85 The Slope is Incorrect
86 Be More Careful About How You Pick Slopes
87 Topological Information is Incorrect
88 Another Example
89 Morse Scanning
90 Papers to Read If you like the following techniques, they are gathered together in the paper Pixelations of planar semialgebraic sets and shape recognition by Nicolaescu and Rowekamp
91 Papers to Read If you like the following techniques, they are gathered together in the paper Pixelations of planar semialgebraic sets and shape recognition by Nicolaescu and Rowekamp (Available online and appearing in a forthcoming issue of Algebraic and Geometric Topology)
92 In Three Dimensions Three dimensions can be related to two dimensions by using scanning.
93 In Three Dimensions Three dimensions can be related to two dimensions by using scanning. (Think of CAT scans)
94 In Three Dimensions Three dimensions can be related to two dimensions by using scanning. (Think of CAT scans) Mathematically this relates to Morse theory.
95 In Three Dimensions Three dimensions can be related to two dimensions by using scanning. (Think of CAT scans) Mathematically this relates to Morse theory. But problems can arise much more easily.
96 General Approximation Generally problems are made harder by increasing the dimension or requiring finer approximation.
97 General Approximation Generally problems are made harder by increasing the dimension or requiring finer approximation. I discuss very good approximations, but only in low dimensions.
98 General Approximation Generally problems are made harder by increasing the dimension or requiring finer approximation. I discuss very good approximations, but only in low dimensions. The opposite problem (loose approximations in high dimensions) is very active currently.
99 Suggested Works Edelsbruner, Harer, Computational Topology, An Introduction Fu, Convergence of curvatures in secant approximations Hatcher, Algebraic Topology Morvan, Generalized Curvatures Nicolaescu, An Invitation to Morse Theory Nicolaescu, Lectures on the Geometry of Manifolds
Background for Surface Integration
 Background for urface Integration 1 urface Integrals We have seen in previous work how to define and compute line integrals in R 2. You should remember the basic surface integrals that we will need to
Background for urface Integration 1 urface Integrals We have seen in previous work how to define and compute line integrals in R 2. You should remember the basic surface integrals that we will need to
Surfaces: notes on Geometry & Topology
 Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ x + 5y + 7z 9x + 3y + 11z
 Basic Linear Algebra Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ 1 5 ] 7 9 3 11 Often matrices are used to describe in a simpler way a series of linear equations.
Basic Linear Algebra Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ 1 5 ] 7 9 3 11 Often matrices are used to describe in a simpler way a series of linear equations.
Measuring Lengths The First Fundamental Form
 Differential Geometry Lia Vas Measuring Lengths The First Fundamental Form Patching up the Coordinate Patches. Recall that a proper coordinate patch of a surface is given by parametric equations x = (x(u,
Differential Geometry Lia Vas Measuring Lengths The First Fundamental Form Patching up the Coordinate Patches. Recall that a proper coordinate patch of a surface is given by parametric equations x = (x(u,
What is a... Manifold?
 What is a... Manifold? Steve Hurder Manifolds happens all the time! We just have to know them when we see them. Manifolds have dimension, just like Euclidean space: 1-dimension is the line, 2-dimension
What is a... Manifold? Steve Hurder Manifolds happens all the time! We just have to know them when we see them. Manifolds have dimension, just like Euclidean space: 1-dimension is the line, 2-dimension
Curvature Berkeley Math Circle January 08, 2013
 Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
Parallel Transport on the Torus
 MLI Home Mathematics The Torus Parallel Transport Parallel Transport on the Torus Because it really is all about the torus, baby After reading about the torus s curvature, shape operator, and geodesics,
MLI Home Mathematics The Torus Parallel Transport Parallel Transport on the Torus Because it really is all about the torus, baby After reading about the torus s curvature, shape operator, and geodesics,
Geometry and Gravitation
 Chapter 15 Geometry and Gravitation 15.1 Introduction to Geometry Geometry is one of the oldest branches of mathematics, competing with number theory for historical primacy. Like all good science, its
Chapter 15 Geometry and Gravitation 15.1 Introduction to Geometry Geometry is one of the oldest branches of mathematics, competing with number theory for historical primacy. Like all good science, its
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 24 Solid Modelling
 Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 24 Solid Modelling Welcome to the lectures on computer graphics. We have
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 24 Solid Modelling Welcome to the lectures on computer graphics. We have
Shape Modeling. Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell. CS 523: Computer Graphics, Spring 2011
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
Euler s Theorem. Brett Chenoweth. February 26, 2013
 Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
274 Curves on Surfaces, Lecture 5
 274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
Rational Numbers: Graphing: The Coordinate Plane
 Rational Numbers: Graphing: The Coordinate Plane A special kind of plane used in mathematics is the coordinate plane, sometimes called the Cartesian plane after its inventor, René Descartes. It is one
Rational Numbers: Graphing: The Coordinate Plane A special kind of plane used in mathematics is the coordinate plane, sometimes called the Cartesian plane after its inventor, René Descartes. It is one
Triangle meshes I. CS 4620 Lecture Kavita Bala (with previous instructor Marschner) Cornell CS4620 Fall 2015 Lecture 2
 Cornell CS4620 Fall 2015 Lecture 2") Triangle meshes I CS 4620 Lecture 2 1 Shape http://fc00.deviantart.net/fs70/f/2014/220/5/3/audi_r8_render_by_smiska333-d7u9pjt.jpg spheres Andrzej Barabasz approximate sphere Rineau & Yvinec CGAL manual
Triangle meshes I CS 4620 Lecture 2 1 Shape http://fc00.deviantart.net/fs70/f/2014/220/5/3/audi_r8_render_by_smiska333-d7u9pjt.jpg spheres Andrzej Barabasz approximate sphere Rineau & Yvinec CGAL manual
A GENTLE INTRODUCTION TO THE BASIC CONCEPTS OF SHAPE SPACE AND SHAPE STATISTICS
 A GENTLE INTRODUCTION TO THE BASIC CONCEPTS OF SHAPE SPACE AND SHAPE STATISTICS HEMANT D. TAGARE. Introduction. Shape is a prominent visual feature in many images. Unfortunately, the mathematical theory
A GENTLE INTRODUCTION TO THE BASIC CONCEPTS OF SHAPE SPACE AND SHAPE STATISTICS HEMANT D. TAGARE. Introduction. Shape is a prominent visual feature in many images. Unfortunately, the mathematical theory
DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU /858B Fall 2017
 DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU 15-458/858B Fall 2017 LECTURE 10: DISCRETE CURVATURE DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU 15-458/858B
DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU 15-458/858B Fall 2017 LECTURE 10: DISCRETE CURVATURE DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU 15-458/858B
Triangle meshes I. CS 4620 Lecture Steve Marschner. Cornell CS4620 Spring 2017
 Triangle meshes I CS 4620 Lecture 2 2017 Steve Marschner 1 spheres Andrzej Barabasz approximate sphere Rineau & Yvinec CGAL manual 2017 Steve Marschner 2 finite element analysis PATRIOT Engineering 2017
Triangle meshes I CS 4620 Lecture 2 2017 Steve Marschner 1 spheres Andrzej Barabasz approximate sphere Rineau & Yvinec CGAL manual 2017 Steve Marschner 2 finite element analysis PATRIOT Engineering 2017
Triangle meshes I. CS 4620 Lecture 2
 Triangle meshes I CS 4620 Lecture 2 2014 Steve Marschner 1 spheres Andrzej Barabasz approximate sphere Rineau & Yvinec CGAL manual 2014 Steve Marschner 2 finite element analysis PATRIOT Engineering 2014
Triangle meshes I CS 4620 Lecture 2 2014 Steve Marschner 1 spheres Andrzej Barabasz approximate sphere Rineau & Yvinec CGAL manual 2014 Steve Marschner 2 finite element analysis PATRIOT Engineering 2014
Planar Graphs and Surfaces. Graphs 2 1/58
 Planar Graphs and Surfaces Graphs 2 1/58 Last time we discussed the Four Color Theorem, which says that any map can be colored with at most 4 colors and not have two regions that share a border having
Planar Graphs and Surfaces Graphs 2 1/58 Last time we discussed the Four Color Theorem, which says that any map can be colored with at most 4 colors and not have two regions that share a border having
Motivation. Parametric Curves (later Surfaces) Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)
 Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)") Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Course Number: Course Title: Geometry
 Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Geometric Modeling Mortenson Chapter 11. Complex Model Construction
 Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
R f da (where da denotes the differential of area dxdy (or dydx)
") Math 28H Topics for the second exam (Technically, everything covered on the first exam, plus) Constrained Optimization: Lagrange Multipliers Most optimization problems that arise naturally are not unconstrained;
Math 28H Topics for the second exam (Technically, everything covered on the first exam, plus) Constrained Optimization: Lagrange Multipliers Most optimization problems that arise naturally are not unconstrained;
Prime Time (Factors and Multiples)
") CONFIDENCE LEVEL: Prime Time Knowledge Map for 6 th Grade Math Prime Time (Factors and Multiples). A factor is a whole numbers that is multiplied by another whole number to get a product. (Ex: x 5 = ;
CONFIDENCE LEVEL: Prime Time Knowledge Map for 6 th Grade Math Prime Time (Factors and Multiples). A factor is a whole numbers that is multiplied by another whole number to get a product. (Ex: x 5 = ;
Digits. Value The numbers a digit. Standard Form. Expanded Form. The symbols used to show numbers: 0,1,2,3,4,5,6,7,8,9
 Digits The symbols used to show numbers: 0,1,2,3,4,5,6,7,8,9 Value The numbers a digit represents, which is determined by the position of the digits Standard Form Expanded Form A common way of the writing
Digits The symbols used to show numbers: 0,1,2,3,4,5,6,7,8,9 Value The numbers a digit represents, which is determined by the position of the digits Standard Form Expanded Form A common way of the writing
Potato Theory. (Following Bangert, Franks, Hingston and J. Danforth Quayle)
") Potato Theory (Following Bangert, Franks, Hingston and J. Danforth Quayle) Ben McKay [27-Feb-2001] (Following Bangert, Franks, Hingston and J. Danforth Quayle) Shine a laser on a thin curved layer of glass
Potato Theory (Following Bangert, Franks, Hingston and J. Danforth Quayle) Ben McKay [27-Feb-2001] (Following Bangert, Franks, Hingston and J. Danforth Quayle) Shine a laser on a thin curved layer of glass
(Discrete) Differential Geometry
 Differential Geometry") (Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
(Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
Number/Computation. addend Any number being added. digit Any one of the ten symbols: 0, 1, 2, 3, 4, 5, 6, 7, 8, or 9
 14 Number/Computation addend Any number being added algorithm A step-by-step method for computing array A picture that shows a number of items arranged in rows and columns to form a rectangle associative
14 Number/Computation addend Any number being added algorithm A step-by-step method for computing array A picture that shows a number of items arranged in rows and columns to form a rectangle associative
Lecture 15: Segmentation (Edge Based, Hough Transform)
") Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
One simple example is that of a cube. Each face is a square (=regular quadrilateral) and each vertex is connected to exactly three squares.
 and each vertex is connected to exactly three squares.") Berkeley Math Circle Intermediate I, 1/23, 1/20, 2/6 Presenter: Elysée Wilson-Egolf Topic: Polygons, Polyhedra, Polytope Series Part 1 Polygon Angle Formula Let s start simple. How do we find the sum of
Berkeley Math Circle Intermediate I, 1/23, 1/20, 2/6 Presenter: Elysée Wilson-Egolf Topic: Polygons, Polyhedra, Polytope Series Part 1 Polygon Angle Formula Let s start simple. How do we find the sum of
Ray Optics I. Last time, finished EM theory Looked at complex boundary problems TIR: Snell s law complex Metal mirrors: index complex
 Phys 531 Lecture 8 20 September 2005 Ray Optics I Last time, finished EM theory Looked at complex boundary problems TIR: Snell s law complex Metal mirrors: index complex Today shift gears, start applying
Phys 531 Lecture 8 20 September 2005 Ray Optics I Last time, finished EM theory Looked at complex boundary problems TIR: Snell s law complex Metal mirrors: index complex Today shift gears, start applying
CSE 5559 Computational Topology: Theory, algorithms, and applications to data analysis. Lecture 0: Introduction. Instructor: Yusu Wang
 CSE 5559 Computational Topology: Theory, algorithms, and applications to data analysis Lecture 0: Introduction Instructor: Yusu Wang Lecture 0: Introduction What is topology Why should we be interested
CSE 5559 Computational Topology: Theory, algorithms, and applications to data analysis Lecture 0: Introduction Instructor: Yusu Wang Lecture 0: Introduction What is topology Why should we be interested
Answer Key: Three-Dimensional Cross Sections
 Geometry A Unit Answer Key: Three-Dimensional Cross Sections Name Date Objectives In this lesson, you will: visualize three-dimensional objects from different perspectives be able to create a projection
Geometry A Unit Answer Key: Three-Dimensional Cross Sections Name Date Objectives In this lesson, you will: visualize three-dimensional objects from different perspectives be able to create a projection
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
Fall 2016 Semester METR 3113 Atmospheric Dynamics I: Introduction to Atmospheric Kinematics and Dynamics
 Fall 2016 Semester METR 3113 Atmospheric Dynamics I: Introduction to Atmospheric Kinematics and Dynamics Lecture 5 August 31 2016 Topics: Polar coordinate system Conversion of polar coordinates to 2-D
Fall 2016 Semester METR 3113 Atmospheric Dynamics I: Introduction to Atmospheric Kinematics and Dynamics Lecture 5 August 31 2016 Topics: Polar coordinate system Conversion of polar coordinates to 2-D
The radius for a regular polygon is the same as the radius of the circumscribed circle.
 Perimeter and Area The perimeter and area of geometric shapes are basic properties that we need to know. The more complex a shape is, the more complex the process can be in finding its perimeter and area.
Perimeter and Area The perimeter and area of geometric shapes are basic properties that we need to know. The more complex a shape is, the more complex the process can be in finding its perimeter and area.
Glossary of dictionary terms in the AP geometry units
 Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
February 07, Dimensional Geometry Notebook.notebook. Glossary & Standards. Prisms and Cylinders. Return to Table of Contents
 Prisms and Cylinders Glossary & Standards Return to Table of Contents 1 Polyhedrons 3-Dimensional Solids A 3-D figure whose faces are all polygons Sort the figures into the appropriate side. 2. Sides are
Prisms and Cylinders Glossary & Standards Return to Table of Contents 1 Polyhedrons 3-Dimensional Solids A 3-D figure whose faces are all polygons Sort the figures into the appropriate side. 2. Sides are
Geometrization and the Poincaré conjecture
 Geometrization and the Poincaré conjecture Jan Metzger BRIGFOS, 2008 History of the Poincaré conjecture In 1904 Poincaré formulated his conjecture. It is a statement about three dimensional geometric objects,
Geometrization and the Poincaré conjecture Jan Metzger BRIGFOS, 2008 History of the Poincaré conjecture In 1904 Poincaré formulated his conjecture. It is a statement about three dimensional geometric objects,
On the Shape of Data
 On the Shape of Data Caren Marzban!, Ulvi Yurtsever 2 1 Applied Physics Lab, and Dept of Statistics, University of Washington, Seattle, WA 98195 2 MathSense Analytics, 1273 Sunny Oaks Circle, Altadena,
On the Shape of Data Caren Marzban!, Ulvi Yurtsever 2 1 Applied Physics Lab, and Dept of Statistics, University of Washington, Seattle, WA 98195 2 MathSense Analytics, 1273 Sunny Oaks Circle, Altadena,
Heegaard splittings and virtual fibers
 Heegaard splittings and virtual fibers Joseph Maher maher@math.okstate.edu Oklahoma State University May 2008 Theorem: Let M be a closed hyperbolic 3-manifold, with a sequence of finite covers of bounded
Heegaard splittings and virtual fibers Joseph Maher maher@math.okstate.edu Oklahoma State University May 2008 Theorem: Let M be a closed hyperbolic 3-manifold, with a sequence of finite covers of bounded
Triangle meshes. Computer Graphics CSE 167 Lecture 8
 Triangle meshes Computer Graphics CSE 167 Lecture 8 Examples Spheres Andrzej Barabasz Approximate sphere Rineau & Yvinec CGAL manual Based on slides courtesy of Steve Marschner 2 Examples Finite element
Triangle meshes Computer Graphics CSE 167 Lecture 8 Examples Spheres Andrzej Barabasz Approximate sphere Rineau & Yvinec CGAL manual Based on slides courtesy of Steve Marschner 2 Examples Finite element
STATISTICS MEAN Know the TOTAL # of points MEDIAN MIDDLE ($) Arrange the scores in order MODE most frequent. RANGE DIFFERENCE in high and low scores
 Arrange the scores in order MODE most frequent. RANGE DIFFERENCE in high and low scores") HSPE Mathematics Hints for SUCCESS The BASICS Be positive, be reassuring. Tell the students that if they have done what you have asked in preparation, then they are prepared for the test. They will pass
HSPE Mathematics Hints for SUCCESS The BASICS Be positive, be reassuring. Tell the students that if they have done what you have asked in preparation, then they are prepared for the test. They will pass
Inverse and Implicit functions
 CHAPTER 3 Inverse and Implicit functions. Inverse Functions and Coordinate Changes Let U R d be a domain. Theorem. (Inverse function theorem). If ϕ : U R d is differentiable at a and Dϕ a is invertible,
CHAPTER 3 Inverse and Implicit functions. Inverse Functions and Coordinate Changes Let U R d be a domain. Theorem. (Inverse function theorem). If ϕ : U R d is differentiable at a and Dϕ a is invertible,
Grade 9 Math Terminology
 Unit 1 Basic Skills Review BEDMAS a way of remembering order of operations: Brackets, Exponents, Division, Multiplication, Addition, Subtraction Collect like terms gather all like terms and simplify as
Unit 1 Basic Skills Review BEDMAS a way of remembering order of operations: Brackets, Exponents, Division, Multiplication, Addition, Subtraction Collect like terms gather all like terms and simplify as
Curve and Surface Basics
 Curve and Surface Basics Implicit and parametric forms Power basis form Bezier curves Rational Bezier Curves Tensor Product Surfaces ME525x NURBS Curve and Surface Modeling Page 1 Implicit and Parametric
Curve and Surface Basics Implicit and parametric forms Power basis form Bezier curves Rational Bezier Curves Tensor Product Surfaces ME525x NURBS Curve and Surface Modeling Page 1 Implicit and Parametric
Homology of Simplicial Complexes
 Homology of Simplicial Complexes Math, David Perkinson Introduction. This is an introduction to the homology of simplicial complexes suitable for a first course in linear algebra. It uses little more than
Homology of Simplicial Complexes Math, David Perkinson Introduction. This is an introduction to the homology of simplicial complexes suitable for a first course in linear algebra. It uses little more than
What would you see if you live on a flat torus? What is the relationship between it and a room with 2 mirrors?
 DAY I Activity I: What is the sum of the angles of a triangle? How can you show it? How about a quadrilateral (a shape with 4 sides)? A pentagon (a shape with 5 sides)? Can you find the sum of their angles
DAY I Activity I: What is the sum of the angles of a triangle? How can you show it? How about a quadrilateral (a shape with 4 sides)? A pentagon (a shape with 5 sides)? Can you find the sum of their angles
Accelerated Pre-Calculus Unit 1 Task 1: Our Only Focus: Circles & Parabolas Review
 Accelerated Pre-Calculus Unit 1 Task 1: Our Only Focus: Circles & Parabolas Review Name: Date: Period: For most students, you last learned about conic sections in Analytic Geometry, which was a while ago.
Accelerated Pre-Calculus Unit 1 Task 1: Our Only Focus: Circles & Parabolas Review Name: Date: Period: For most students, you last learned about conic sections in Analytic Geometry, which was a while ago.
Parametric Surfaces and Surface Area
 Parametric Surfaces and Surface Area What to know: 1. Be able to parametrize standard surfaces, like the ones in the handout.. Be able to understand what a parametrized surface looks like (for this class,
Parametric Surfaces and Surface Area What to know: 1. Be able to parametrize standard surfaces, like the ones in the handout.. Be able to understand what a parametrized surface looks like (for this class,
Numerical Treatment of Geodesic Differential. Equations on a Surface in
 International Mathematical Forum, Vol. 8, 2013, no. 1, 15-29 Numerical Treatment of Geodesic Differential Equations on a Surface in Nassar H. Abdel-All Department of Mathematics, Faculty of Science Assiut
International Mathematical Forum, Vol. 8, 2013, no. 1, 15-29 Numerical Treatment of Geodesic Differential Equations on a Surface in Nassar H. Abdel-All Department of Mathematics, Faculty of Science Assiut
January 30, 2019 LECTURE 2: FUNCTIONS OF SEVERAL VARIABLES.
 January 30, 2019 LECTURE 2: FUNCTIONS OF SEVERAL VARIABLES 110211 HONORS MULTIVARIABLE CALCULUS PROFESSOR RICHARD BROWN Synopsis Today we begin the course in earnest in Chapter 2, although, again like
January 30, 2019 LECTURE 2: FUNCTIONS OF SEVERAL VARIABLES 110211 HONORS MULTIVARIABLE CALCULUS PROFESSOR RICHARD BROWN Synopsis Today we begin the course in earnest in Chapter 2, although, again like
Discrete Differential Geometry: An Applied Introduction
 Discrete Differential Geometry: An Applied Introduction Eitan Grinspun with Mathieu Desbrun, Konrad Polthier, Peter Schröder, & Ari Stern 1 Differential Geometry Why do we care? geometry of surfaces Springborn
Discrete Differential Geometry: An Applied Introduction Eitan Grinspun with Mathieu Desbrun, Konrad Polthier, Peter Schröder, & Ari Stern 1 Differential Geometry Why do we care? geometry of surfaces Springborn
INTRODUCTION TO 3-MANIFOLDS
 INTRODUCTION TO 3-MANIFOLDS NIK AKSAMIT As we know, a topological n-manifold X is a Hausdorff space such that every point contained in it has a neighborhood (is contained in an open set) homeomorphic to
INTRODUCTION TO 3-MANIFOLDS NIK AKSAMIT As we know, a topological n-manifold X is a Hausdorff space such that every point contained in it has a neighborhood (is contained in an open set) homeomorphic to
COMP30019 Graphics and Interaction Perspective & Polygonal Geometry
 COMP30019 Graphics and Interaction Perspective & Polygonal Geometry Department of Computing and Information Systems The Lecture outline Introduction Perspective Geometry Virtual camera Centre of projection
COMP30019 Graphics and Interaction Perspective & Polygonal Geometry Department of Computing and Information Systems The Lecture outline Introduction Perspective Geometry Virtual camera Centre of projection
Flavor of Computational Geometry. Convex Hull in 2D. Shireen Y. Elhabian Aly A. Farag University of Louisville
 Flavor of Computational Geometry Convex Hull in 2D Shireen Y. Elhabian Aly A. Farag University of Louisville February 2010 Agenda Introduction Definitions of Convexity and Convex Hulls Naïve Algorithms
Flavor of Computational Geometry Convex Hull in 2D Shireen Y. Elhabian Aly A. Farag University of Louisville February 2010 Agenda Introduction Definitions of Convexity and Convex Hulls Naïve Algorithms
Parallel or Perpendicular? How Can You Tell? Teacher Notes Page 1 of 6
 Teacher Notes How can a student be sure when lines are parallel or perpendicular to a given graph using the graphing calculator? The difficulty lies in matching a mechanical graph that is on a rectangular
Teacher Notes How can a student be sure when lines are parallel or perpendicular to a given graph using the graphing calculator? The difficulty lies in matching a mechanical graph that is on a rectangular
Vector Addition. Qty Item Part Number 1 Force Table ME-9447B 1 Mass and Hanger Set ME Carpenter s level 1 String
 rev 05/2018 Vector Addition Equipment List Qty Item Part Number 1 Force Table ME-9447B 1 Mass and Hanger Set ME-8979 1 Carpenter s level 1 String Purpose The purpose of this lab is for the student to gain
rev 05/2018 Vector Addition Equipment List Qty Item Part Number 1 Force Table ME-9447B 1 Mass and Hanger Set ME-8979 1 Carpenter s level 1 String Purpose The purpose of this lab is for the student to gain
Geometry. Instructional Activities:
 GEOMETRY Instructional Activities: Geometry Assessment: A. Direct Instruction A. Quizzes B. Cooperative Learning B. Skill Reviews C. Technology Integration C. Test Prep Questions D. Study Guides D. Chapter
GEOMETRY Instructional Activities: Geometry Assessment: A. Direct Instruction A. Quizzes B. Cooperative Learning B. Skill Reviews C. Technology Integration C. Test Prep Questions D. Study Guides D. Chapter
The Curvature of the Torus
 The Curvature of the Torus http://www.rdrop.com/~half/math/torus/curvature... MLI Home Mathematics The Torus Curvature The Curvature of the Torus Let's get bent We begin with the parameterized surface:
The Curvature of the Torus http://www.rdrop.com/~half/math/torus/curvature... MLI Home Mathematics The Torus Curvature The Curvature of the Torus Let's get bent We begin with the parameterized surface:
Impulse Gauss Curvatures 2002 SSHE-MA Conference. Howard Iseri Mansfield University
 Impulse Gauss Curvatures 2002 SSHE-MA Conference Howard Iseri Mansfield University Abstract: In Riemannian (differential) geometry, the differences between Euclidean geometry, elliptic geometry, and hyperbolic
Impulse Gauss Curvatures 2002 SSHE-MA Conference Howard Iseri Mansfield University Abstract: In Riemannian (differential) geometry, the differences between Euclidean geometry, elliptic geometry, and hyperbolic
In this lecture we introduce the Gauss-Bonnet theorem. The required section is The optional sections are
 Math 348 Fall 2017 Lectures 20: The Gauss-Bonnet Theorem II Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams.
Math 348 Fall 2017 Lectures 20: The Gauss-Bonnet Theorem II Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams.
Iain Claridge. Surface Curvature
 Iain Claridge Surface Curvature Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Curves and surfaces in 3D For our purposes: A curve is a map α : ℝ ℝ3 a b I (or from some subset I of ℝ) α(a) α(b)
Iain Claridge Surface Curvature Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Curves and surfaces in 3D For our purposes: A curve is a map α : ℝ ℝ3 a b I (or from some subset I of ℝ) α(a) α(b)
Topic: Orientation, Surfaces, and Euler characteristic
 Topic: Orientation, Surfaces, and Euler characteristic The material in these notes is motivated by Chapter 2 of Cromwell. A source I used for smooth manifolds is do Carmo s Riemannian Geometry. Ideas of
Topic: Orientation, Surfaces, and Euler characteristic The material in these notes is motivated by Chapter 2 of Cromwell. A source I used for smooth manifolds is do Carmo s Riemannian Geometry. Ideas of
Dr. Allen Back. Nov. 19, 2014
 Why of Dr. Allen Back Nov. 19, 2014 Graph Picture of T u, T v for a Lat/Long Param. of the Sphere. Why of Graph Basic Picture Why of Graph Why Φ(u, v) = (x(u, v), y(u, v), z(u, v)) Tangents T u = (x u,
Why of Dr. Allen Back Nov. 19, 2014 Graph Picture of T u, T v for a Lat/Long Param. of the Sphere. Why of Graph Basic Picture Why of Graph Why Φ(u, v) = (x(u, v), y(u, v), z(u, v)) Tangents T u = (x u,
Summer Math Assignments for Students Entering Integrated Math
 Summer Math Assignments for Students Entering Integrated Math Purpose: The purpose of this packet is to review pre-requisite skills necessary for the student to be successful in Integrated Math. You are
Summer Math Assignments for Students Entering Integrated Math Purpose: The purpose of this packet is to review pre-requisite skills necessary for the student to be successful in Integrated Math. You are
Introduction to geometry
 1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Learning Task: Exploring Reflections and Rotations
 Learning Task: Exploring Reflections and Rotations Name Date Mathematical Goals Develop and demonstrate an understanding of reflections and rotations of figures in general and on a coordinate plane. Essential
Learning Task: Exploring Reflections and Rotations Name Date Mathematical Goals Develop and demonstrate an understanding of reflections and rotations of figures in general and on a coordinate plane. Essential
3.5 Equations of Lines and Planes
 3.5 Equations of Lines and Planes Objectives Iknowhowtodefinealineinthree-dimensionalspace. I can write a line as a parametric equation, a symmetric equation, and a vector equation. I can define a plane
3.5 Equations of Lines and Planes Objectives Iknowhowtodefinealineinthree-dimensionalspace. I can write a line as a parametric equation, a symmetric equation, and a vector equation. I can define a plane
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]
![Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]](/thumbs/93/111713975.jpg "Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]") Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Tangent line problems
 You will find lots of practice problems and homework problems that simply ask you to differentiate. The following examples are to illustrate some of the types of tangent line problems that you may come
You will find lots of practice problems and homework problems that simply ask you to differentiate. The following examples are to illustrate some of the types of tangent line problems that you may come
Math 348 Differential Geometry of Curves and Surfaces
 Math 348 Differential Geometry of Curves and Surfaces Lecture 3 Curves in Calculus Xinwei Yu Sept. 12, 2017 CAB 527, xinwei2@ualberta.ca Department of Mathematical & Statistical Sciences University of
Math 348 Differential Geometry of Curves and Surfaces Lecture 3 Curves in Calculus Xinwei Yu Sept. 12, 2017 CAB 527, xinwei2@ualberta.ca Department of Mathematical & Statistical Sciences University of
Hyperbolic Geometry. Thomas Prince. Imperial College London. 21 January 2017
 Hyperbolic Geometry Thomas Prince Imperial College London 21 January 2017 Thomas Prince (Imperial College London) Hyperbolic Planes 21 January 2017 1 / 31 Introducing Geometry What does the word geometry
Hyperbolic Geometry Thomas Prince Imperial College London 21 January 2017 Thomas Prince (Imperial College London) Hyperbolic Planes 21 January 2017 1 / 31 Introducing Geometry What does the word geometry
SPECIAL TECHNIQUES-II
 SPECIAL TECHNIQUES-II Lecture 19: Electromagnetic Theory Professor D. K. Ghosh, Physics Department, I.I.T., Bombay Method of Images for a spherical conductor Example :A dipole near aconducting sphere The
SPECIAL TECHNIQUES-II Lecture 19: Electromagnetic Theory Professor D. K. Ghosh, Physics Department, I.I.T., Bombay Method of Images for a spherical conductor Example :A dipole near aconducting sphere The
STANDARDS OF LEARNING CONTENT REVIEW NOTES GEOMETRY. 3 rd Nine Weeks,
 STANDARDS OF LEARNING CONTENT REVIEW NOTES GEOMETRY 3 rd Nine Weeks, 2016-2017 1 OVERVIEW Geometry Content Review Notes are designed by the High School Mathematics Steering Committee as a resource for
STANDARDS OF LEARNING CONTENT REVIEW NOTES GEOMETRY 3 rd Nine Weeks, 2016-2017 1 OVERVIEW Geometry Content Review Notes are designed by the High School Mathematics Steering Committee as a resource for
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Mirror Symmetry Through Reflexive Polytopes
 Mirror Symmetry Through Reflexive Polytopes Physical and Mathematical Dualities Ursula Whitcher Harvey Mudd College April 2010 Outline String Theory and Mirror Symmetry Some Complex Geometry Reflexive
Mirror Symmetry Through Reflexive Polytopes Physical and Mathematical Dualities Ursula Whitcher Harvey Mudd College April 2010 Outline String Theory and Mirror Symmetry Some Complex Geometry Reflexive
A simple problem that has a solution that is far deeper than expected!
 The Water, Gas, Electricity Problem A simple problem that has a solution that is far deeper than expected! Consider the diagram below of three houses and three utilities: water, gas, and electricity. Each
The Water, Gas, Electricity Problem A simple problem that has a solution that is far deeper than expected! Consider the diagram below of three houses and three utilities: water, gas, and electricity. Each
Let be a function. We say, is a plane curve given by the. Let a curve be given by function where is differentiable with continuous.
 Module 8 : Applications of Integration - II Lecture 22 : Arc Length of a Plane Curve [Section 221] Objectives In this section you will learn the following : How to find the length of a plane curve 221
Module 8 : Applications of Integration - II Lecture 22 : Arc Length of a Plane Curve [Section 221] Objectives In this section you will learn the following : How to find the length of a plane curve 221
COMP30019 Graphics and Interaction Perspective Geometry
 COMP30019 Graphics and Interaction Perspective Geometry Department of Computing and Information Systems The Lecture outline Introduction to perspective geometry Perspective Geometry Virtual camera Centre
COMP30019 Graphics and Interaction Perspective Geometry Department of Computing and Information Systems The Lecture outline Introduction to perspective geometry Perspective Geometry Virtual camera Centre
Surfaces. 14 April Surfaces 14 April /29
 Surfaces 14 April 2014 Surfaces 14 April 2014 1/29 Last Week Last week, when we discussed graph theory, we saw that the maximum colors any map might need depends on the surface on which the map is drawn.
Surfaces 14 April 2014 Surfaces 14 April 2014 1/29 Last Week Last week, when we discussed graph theory, we saw that the maximum colors any map might need depends on the surface on which the map is drawn.
Properties of a Circle Diagram Source:
 Properties of a Circle Diagram Source: http://www.ricksmath.com/circles.html Definitions: Circumference (c): The perimeter of a circle is called its circumference Diameter (d): Any straight line drawn
Properties of a Circle Diagram Source: http://www.ricksmath.com/circles.html Definitions: Circumference (c): The perimeter of a circle is called its circumference Diameter (d): Any straight line drawn
GAUSS-BONNET FOR DISCRETE SURFACES
 GAUSS-BONNET FOR DISCRETE SURFACES SOHINI UPADHYAY Abstract. Gauss-Bonnet is a deep result in differential geometry that illustrates a fundamental relationship between the curvature of a surface and its
GAUSS-BONNET FOR DISCRETE SURFACES SOHINI UPADHYAY Abstract. Gauss-Bonnet is a deep result in differential geometry that illustrates a fundamental relationship between the curvature of a surface and its
Estimating normal vectors and curvatures by centroid weights
 Computer Aided Geometric Design 21 (2004) 447 458 www.elsevier.com/locate/cagd Estimating normal vectors and curvatures by centroid weights Sheng-Gwo Chen, Jyh-Yang Wu Department of Mathematics, National
Computer Aided Geometric Design 21 (2004) 447 458 www.elsevier.com/locate/cagd Estimating normal vectors and curvatures by centroid weights Sheng-Gwo Chen, Jyh-Yang Wu Department of Mathematics, National
The World Is Not Flat: An Introduction to Modern Geometry
 The World Is Not Flat: An to The University of Iowa September 15, 2015 The story of a hunting party The story of a hunting party What color was the bear? The story of a hunting party Overview Gauss and
The World Is Not Flat: An to The University of Iowa September 15, 2015 The story of a hunting party The story of a hunting party What color was the bear? The story of a hunting party Overview Gauss and
Bands: A Physical Data Structure to Represent Both Orientable and Non-Orientable 2-Manifold Meshes
 Bands: A Physical Data Structure to Represent Both Orientable and Non-Orientable 2-Manifold Meshes Abstract This paper presents a physical data structure to represent both orientable and non-orientable
Bands: A Physical Data Structure to Represent Both Orientable and Non-Orientable 2-Manifold Meshes Abstract This paper presents a physical data structure to represent both orientable and non-orientable
Tutorial 4. Differential Geometry I - Curves
 23686 Numerical Geometry of Images Tutorial 4 Differential Geometry I - Curves Anastasia Dubrovina c 22 / 2 Anastasia Dubrovina CS 23686 - Tutorial 4 - Differential Geometry I - Curves Differential Geometry
23686 Numerical Geometry of Images Tutorial 4 Differential Geometry I - Curves Anastasia Dubrovina c 22 / 2 Anastasia Dubrovina CS 23686 - Tutorial 4 - Differential Geometry I - Curves Differential Geometry
1 Discrete Connections
 CS 177: Discrete Differential Geometry Homework 4: Vector Field Design (due: Tuesday Nov 30th, 11:59pm) In the last homework you saw how to decompose an existing vector field using DEC. In this homework
CS 177: Discrete Differential Geometry Homework 4: Vector Field Design (due: Tuesday Nov 30th, 11:59pm) In the last homework you saw how to decompose an existing vector field using DEC. In this homework
Algorithmic Semi-algebraic Geometry and its applications. Saugata Basu School of Mathematics & College of Computing Georgia Institute of Technology.
 1 Algorithmic Semi-algebraic Geometry and its applications Saugata Basu School of Mathematics & College of Computing Georgia Institute of Technology. 2 Introduction: Three problems 1. Plan the motion of
1 Algorithmic Semi-algebraic Geometry and its applications Saugata Basu School of Mathematics & College of Computing Georgia Institute of Technology. 2 Introduction: Three problems 1. Plan the motion of
Lectures in Discrete Differential Geometry 3 Discrete Surfaces
 Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Worksheet 3.5: Triple Integrals in Spherical Coordinates. Warm-Up: Spherical Coordinates (ρ, φ, θ)
") Boise State Math 275 (Ultman) Worksheet 3.5: Triple Integrals in Spherical Coordinates From the Toolbox (what you need from previous classes) Know what the volume element dv represents. Be able to find
Boise State Math 275 (Ultman) Worksheet 3.5: Triple Integrals in Spherical Coordinates From the Toolbox (what you need from previous classes) Know what the volume element dv represents. Be able to find
Classification of Surfaces
 Classification of Surfaces 16 April 2014 Classification of Surfaces 16 April 2014 1/29 Last Time On Monday we saw some examples of surfaces and how we can build some by starting with a rectangle and gluing
Classification of Surfaces 16 April 2014 Classification of Surfaces 16 April 2014 1/29 Last Time On Monday we saw some examples of surfaces and how we can build some by starting with a rectangle and gluing
The Fundamental Group, Braids and Circles
 The Fundamental Group, Braids and Circles Pete Goetz Mathematics Colloquium Humboldt State University April 17, 2014 Outline 1) Topology 2) Path Homotopy and The Fundamental Group 3) Covering Spaces and
The Fundamental Group, Braids and Circles Pete Goetz Mathematics Colloquium Humboldt State University April 17, 2014 Outline 1) Topology 2) Path Homotopy and The Fundamental Group 3) Covering Spaces and
LECTURE 18 - OPTIMIZATION
 LECTURE 18 - OPTIMIZATION CHRIS JOHNSON Abstract. In this lecture we ll describe extend the optimization techniques you learned in your first semester calculus class to optimize functions of multiple variables.
LECTURE 18 - OPTIMIZATION CHRIS JOHNSON Abstract. In this lecture we ll describe extend the optimization techniques you learned in your first semester calculus class to optimize functions of multiple variables.
Figure 2.1: An example of a convex set and a nonconvex one.
 Convex Hulls 2.1 Definitions 2 Convexity is the key to understanding and simplifying geometry, and the convex hull plays a role in geometry akin to the sorted order for a collection of numbers. So what
Convex Hulls 2.1 Definitions 2 Convexity is the key to understanding and simplifying geometry, and the convex hull plays a role in geometry akin to the sorted order for a collection of numbers. So what
Dr. Allen Back. Nov. 21, 2014
 Dr. Allen Back of Nov. 21, 2014 The most important thing you should know (e.g. for exams and homework) is how to setup (and perhaps compute if not too hard) surface integrals, triple integrals, etc. But
Dr. Allen Back of Nov. 21, 2014 The most important thing you should know (e.g. for exams and homework) is how to setup (and perhaps compute if not too hard) surface integrals, triple integrals, etc. But
Geometric structures on manifolds
 CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
Introduction to Geometry. Computer Graphics CMU /15-662
 Introduction to Geometry Computer Graphics CMU 15-462/15-662 Assignment 2: 3D Modeling You will be able to create your own models (This mesh was created in Scotty3D in about 5 minutes... you can do much
Introduction to Geometry Computer Graphics CMU 15-462/15-662 Assignment 2: 3D Modeling You will be able to create your own models (This mesh was created in Scotty3D in about 5 minutes... you can do much