Intervals for state estimation
|
|
|
- Shavonne McKinney
- 5 years ago
- Views:
Transcription
1 Intervals for state estimation Luc Jaulin, ENSTA Brest ECA Brest, 23 Mai, 2015
2 1 Interval analysis
3 1.1 Basic notions on set theory
4 Iff is defined as follows f(a) = {2,3,4} = Im(f). f 1 (B) = {a,b,c,e} = dom(f). f 1 (f(a)) = {a,b,c,e} A f 1 (f({b,c})) = {a,b,c}.
5 Iff(x) =x 2, then f([2,3]) = [4,9] f 1 ([4,9]) = [ 3, 2] [2,3]. This is consistent with the property f f 1 (Y) Y.
6 1.2 Interval arithmetic
7 If {+,,,/,max,min} For instance, [x] [y] = [{x y x [x],y [y]}]. [ 1,3]+[2,5] = [1,8] [ 1,3] [2,5] = [ 5,15] [ 1,3]/[2,5] = [ 1 2, 3 2 ].
8 [x,x + ]+[y,y + ] = [x +y,x + +y + ]. [x,x + ] [y,y + ] = [x y x + y x y + x + y +, x y x + y x y + x + y + ].
9 Iff {cos, sin,sqr, sqrt, log, exp,...} For instance, f ([x]) = [{f(x) x [x]}]. sin([0,π]) = [0,1], sqr([ 1,3]) = [ 1,3] 2 = [0,9], abs([ 7,1]) = [0,7], sqrt([ 10,4]) = [ 10,4] = [0,2], log([ 2, 1]) =.
10 1.3 Boxes
11 Abox, orintervalvector [x] ofr n is [x] = [x 1,x+ 1 ] [x n,x + n] = [x 1 ] [x n ]. The set of all boxes ofr n will be denoted byir n.
![Theprincipalplane of [x] is the symmetric](/docs-images/96/129282904/images/12-0.jpg "plane [x] perpendicular to its largest")
12 Theprincipalplane of [x] is the symmetric plane [x] perpendicular to its largest side.
13 1.4 Inclusion function
14 The interval function [f] fromir n toir m, is aninclusion function off if [x] IR n, f([x]) [f]([x]). Inclusion functions [f] and [f] ; here, [f] is minimal.
15 The natural inclusion function forf(x) =x 2 +2x+4 is [f]([x]) = [x] 2 +2[x]+4. If [x] = [ 3,4], we have [f]([ 3,4]) = [ 3,4] 2 +2[ 3,4]+4 = [0,16]+[ 6,8]+4 = [ 2,28]. Notethatf([ 3,4]) = [3,28] [f]([ 3,4]) = [ 2,28].
16 Iff is given by the algorithm Algorithmf(in: x = (x 1,x 2,x 3 ), out: y = (y 1,y 2 )) 1 z :=x 1 ; 2 fork:= 0 to z :=x 2 (z +kx 3 ); 4 next; 5 y 1 :=z; 6 y 2 := sin(z x 1 );
17 Its natural inclusion function is Algorithm [f](in: [x], out: [y]) 1 [z] := [x 1 ]; 2 fork:= 0 to [z] := [x 2 ] ([z]+k [x 3 ]); 4 next; 5 [y 1 ] := [z]; 6 [y 2 ] := sin([z] [x 1 ]); Here, [f] is a convergent, thin and monotonic inclusion function forf.
18 1.5 Subpavings
19 Asubpaving ofr n is a set ofnon-overlapping boxes ofr n. Compact sets X can be bracketed between inner and outer subpavings: X X X +.
20 Example. X ={(x 1,x 2 ) x 2 1 +x2 2 [1,2]}. Set operations such asz:=x+y, X :=f 1 (Y),Z := X Y... can be approximated by subpaving operations.
21 1.6 Set inversion
22 Let f : R n R m and let Y be a subset of R m. Set inversion is the characterization of X ={x R n f(x) Y} =f 1 (Y).
23 We shall use the following tests. (i) [f]([x]) Y [x] X (ii) [f]([x]) Y = [x] X =. Boxes for which these tests failed, will be bisected, except if they are too small.
24 . Algorithm Sivia(in: [x](0),f,y) 1 L :={[x](0)}; 2 pull [x] froml; 3 if [f]([x]) Y, draw([x], red ); 4 elseif [f]([x]) Y =, draw([x], blue ); 5 elseifw([x])<ε, {draw ([x], yellow )}; 6 else bisect [x] and push intol; 7 ifl=, go to 2
25 If X denotes the union of yellow boxes and ifx is the union of red boxes then : X X X X.
26 2 Contractors
27 To characterize X R n, bisection algorithms bisect all boxes in all directions and become inefficient. Interval methods can still be useful if the solution set X is small(optimization problem, solving equations), contraction procedures are used as much as possible, bisections are used only as a last resort.
28 2.1 Definition
29 The operator C X : IR n IR n is a contractor for X R n if [x] IR n CX ([x]) [x] (contractance),, C X ([x]) X = [x] X (completeness).
30
31
32 C X is said to beconvergent if [x](k) x C X ([x](k)) {x} X.
33 2.2 Projection of constraints
34 Letx,y,z be 3 variables such that x [,5], y [,4], z [6, ], z = x+y. Which values forx,y,z are consistent.
35 Since x [,5],y [,4],z [6, ] and z = x+y, we have z =x+y z [6, ] ([,5]+[,4]) = [6, ] [,9] = [6,9]. x =z y x [,5] ([6, ] [,4]) = [,5] [2, ] = [2,5]. y =z x y [,4] ([6, ] [,5]) = [,4] [1, ] = [1,4].
36 The contractor associated withz=x+y is. Algorithm pplus(inout: [z],[x],[y]) 1 [z] := [z] ([x]+[y]); 2 [x] := [x] ([z] [y]); 3 [y] := [y] ([z] [x]).
37 The projection procedure developed for plus can be extended to other ternary constraints such as mult:z =x y, or equivalently mult (x,y,z) R 3 z=x y. The resulting projection procedure becomes Algorithm pmult(inout: [z],[x],[y]) 1 [z] := [z] ([x] [y]); 2 [x] := [x] ([z] 1/[y]); 3 [y] := [y] ([z] 1/[x]).
38 Consider the binary constraint exp{(x,y) R n y = exp(x)}. The associated contractor is Algorithm pexp(inout: [y],[x]) 1 [y] := [y] exp([x]); 2 [x] := [x] log([y]).
39 Any constraint for which such a projection procedure is available will be called a primitive constraint.

40 Projection of the sine constraint
41 2.3 Solvers
42 A CSP (Constraint Satisfaction Problem) is composed of 1) a set of variablesv ={x 1,...,x n }, 2) a set of constraintsc={c 1,...,c m } and 3) a set of interval domains{[x 1 ],...,[x n ]}.
43 Principle of propagation techniques: contract [x] = [x 1 ] [x n ] as follows: (((((([x] c 1 ) c 2 )...) c m ) c 1 ) c 2 )..., until a steady box is reached.
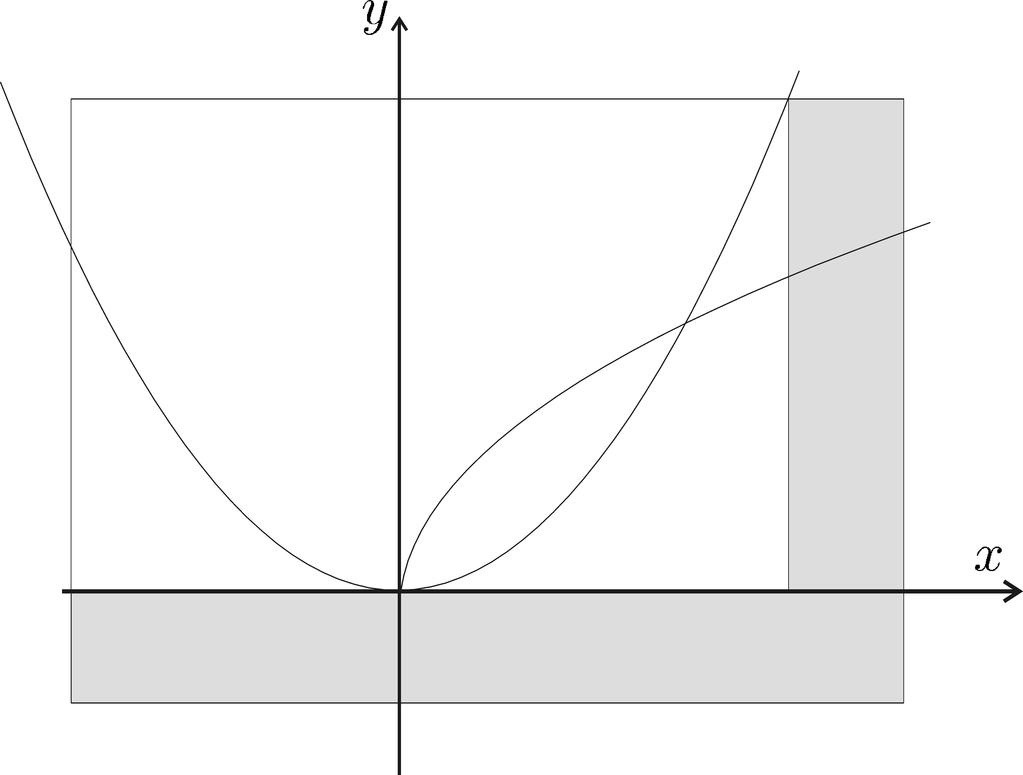
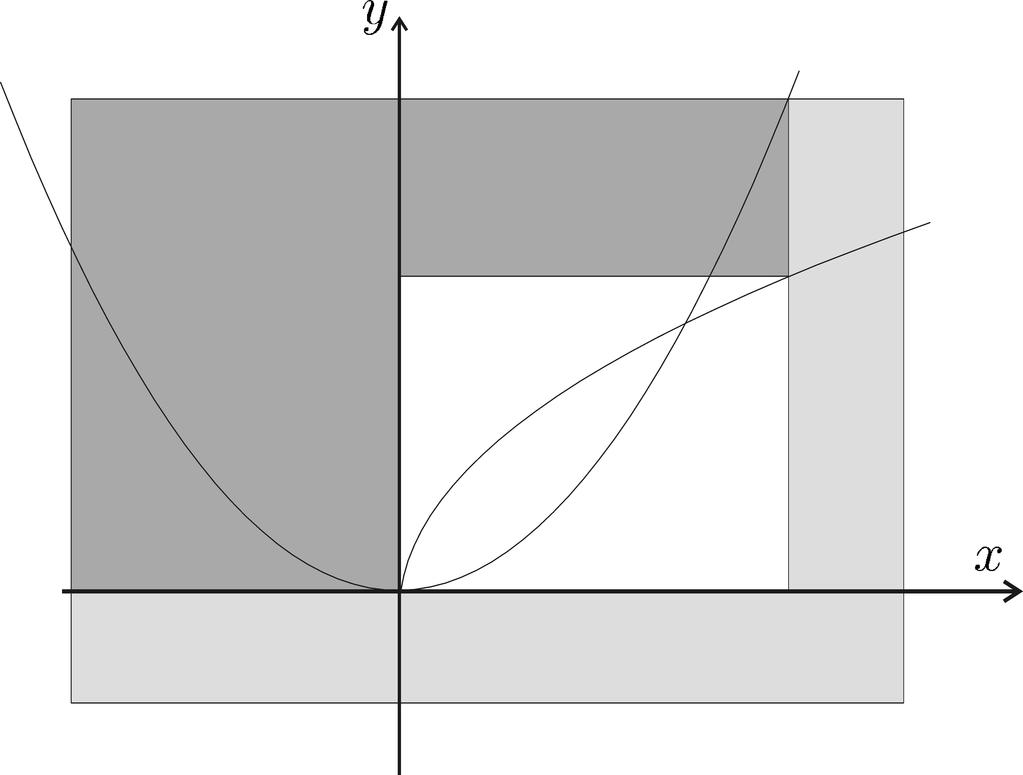
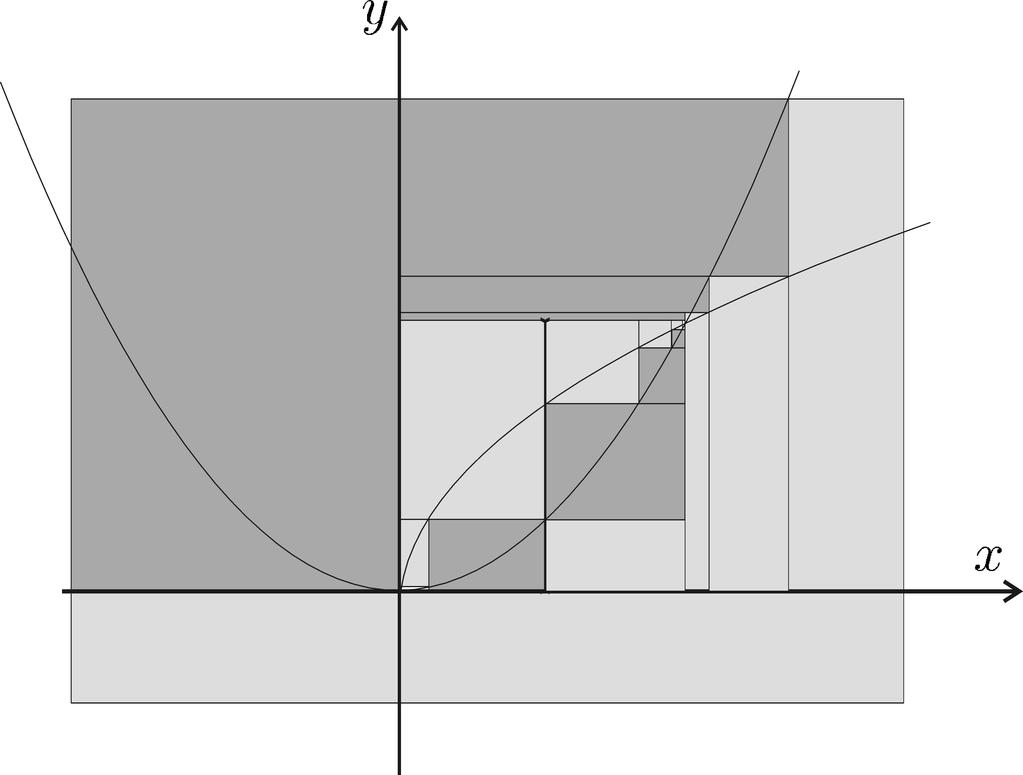
44 Example. Consider the system. y = x 2 y = x.
45 We build two contractors [y] = [y] [x] 2 C 1 : [x] = [x] [y] C 2 : [y] = [y] [x] [x] = [x] [y] 2 associated toy=x 2 associated toy= x
46
47
48
49
50
51
52
53
54
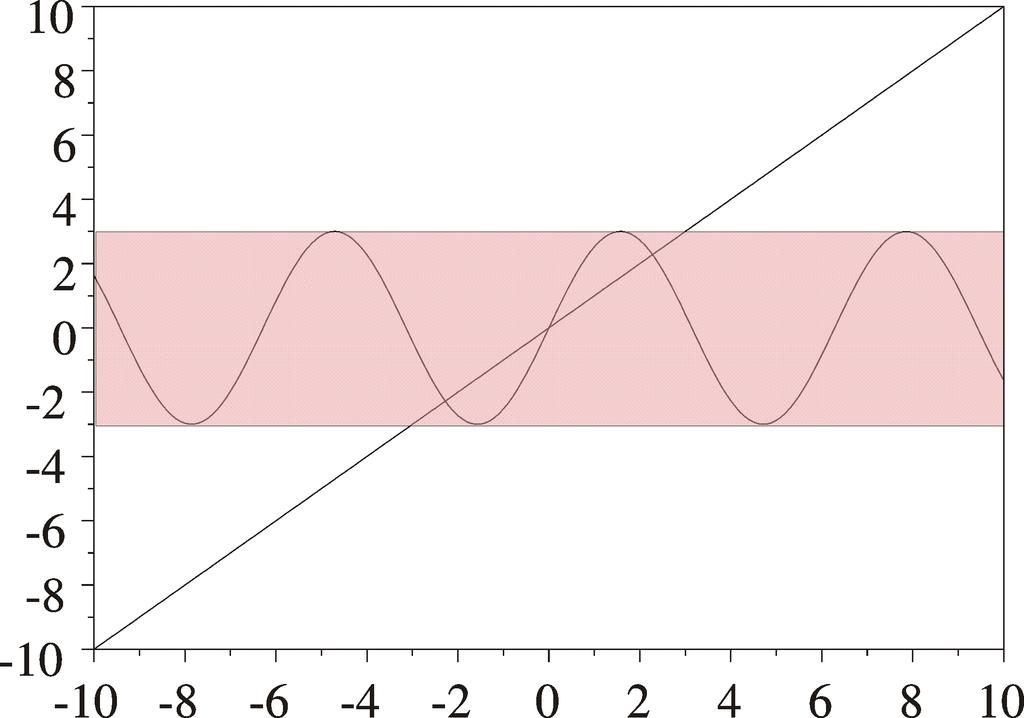
55 Exemple. Consider the system y = 3sin(x) y = x x R,y R.
56
57
58
59
60
61
62
63
64
65
66 2.4 Decomposition into primitive constraints
67 can be decomposed into a =xy b = sin(a) c =x+b x+sin(xy) 0, x [ 1,1],y [ 1,1], x [ 1,1] a [, ] y [ 1,1] b [, ] c [,0]
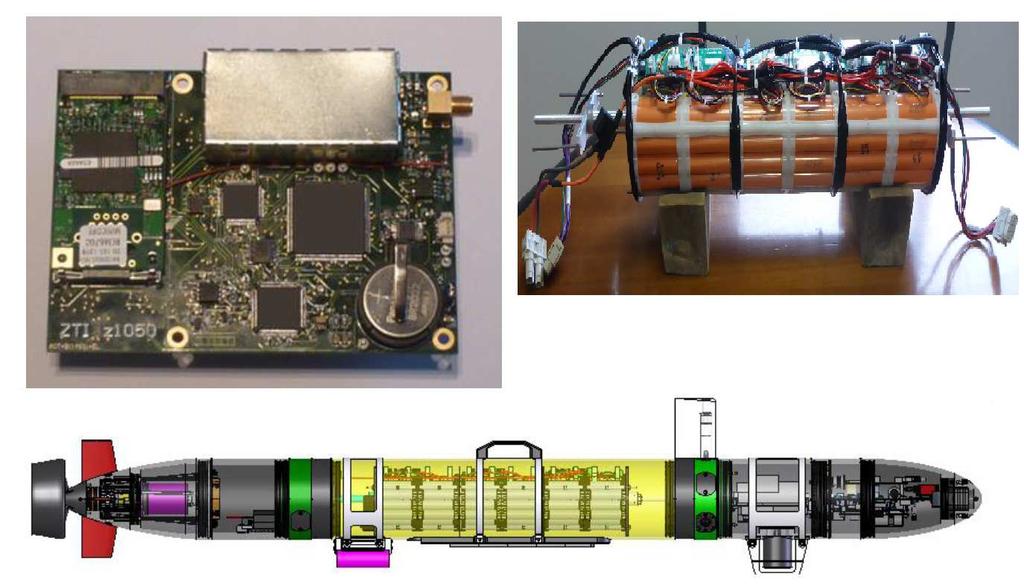
68 3 Redermor

69 The Redermor, GESMA

70 The Redermor at the surface
71 Why choosing an interval constraint approach for SLAM? 1) A reliable method is needed. 2) The model is nonlinear. 3) The pdf of the noises are unknown. 4) Reliable error bounds are provided by the sensors. 5) A huge number of redundant data are available.
72 3.1 Sensors
73 A GPS (Global positioning system) at the surface only. t 0 = 6000 s, l 0 =( o, o )±2.5m t f = s, l f =( o, o )±2.5m

74 A sonar (KLEIN 5400 side scan sonar). Gives the distance r between the robot to the detected object.

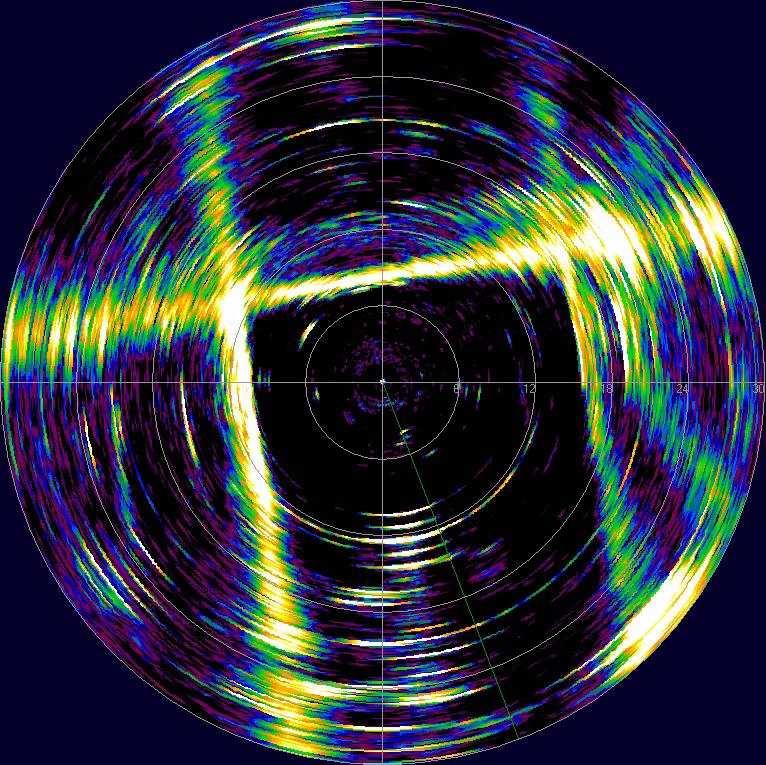
75 Screenshot of SonarPro

76 Detection of a mine using SonarPro
77 A Loch-Doppler. Returns the speed of the robotv r and the altitudeaof the robot±10cm.
78 A Gyrocompass(Octans III from IXSEA). Returns the roll φ, the pitchθ and the headψ. φ θ ψ φ θ ψ [ 1,1] [ 1,1] [ 1,1].
79 3.2 Data Foreachtimet {6000.0,6000.1,6000.2,..., }, we get intervals for φ(t),θ(t),ψ(t),v x r(t),v y r(t),v z r(t),a(t).
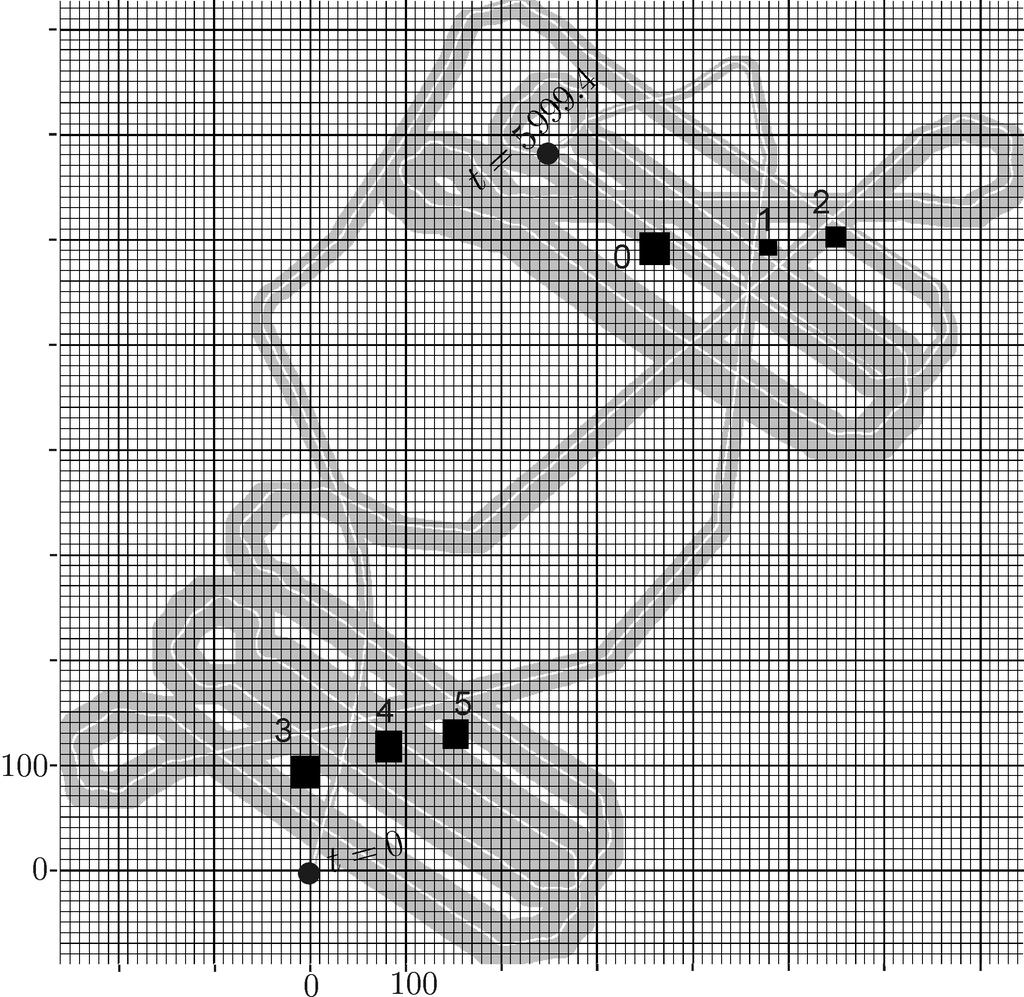
80 Six mines have been detected by the sonar: i τ(i) σ(i) r(i)
81 3.3 Constraints satisfaction problem t {6000.0,6000.1,6000.2,..., }, i {0,1,...,11}, px (t) p y (t) = cos l y (t) 180 π lx (t) l 0 x 0 l y (t) l 0 y, p(t) = (p x (t),p y (t),p z (t)), R ψ (t) = R θ (t) = cosψ(t) sinψ(t) 0 sin ψ(t) cos ψ(t) cosθ(t) 0 sinθ(t) sinθ(t) 0 cosθ(t),,
82 R ϕ (t) = cosϕ(t) sinϕ(t) 0 sinϕ(t) cosϕ(t) R(t) =R ψ (t).r θ (t).r ϕ (t), ṗ(t) =R(t).v r (t) m(σ(i)) p(τ(i)) =r(i),, R T (τ(i))(m(σ(i)) p(τ(i))) [0] [0, ] 2, m z (σ(i)) p z (τ(i)) a(τ(i)) [ 0.5,0.5].
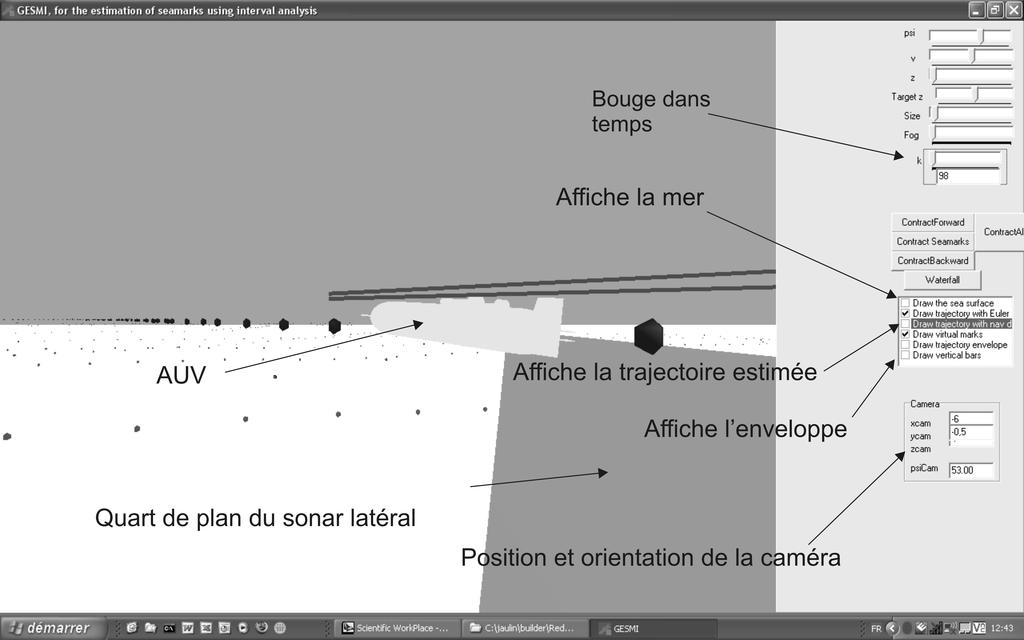
83 3.4 GESMI
")
84 GESMI (Guaranteed Estimation of Sea Mines with Intervals)
85

86
87

88 Trajectory reconstructed by GESMI
89 4 SAUC ISSE
90 Robot SAUC ISSE

91 Portsmouth, July 12-15, 2007.

92

93

94

95

96
97 4.1 Localization with sonar
98
99 4.2 Set-membership approach
100 x(k+1) = fk (x(k),n(k)) y(k) = g k (x(k)), withn(k) N(k) andy(k) Y(k).
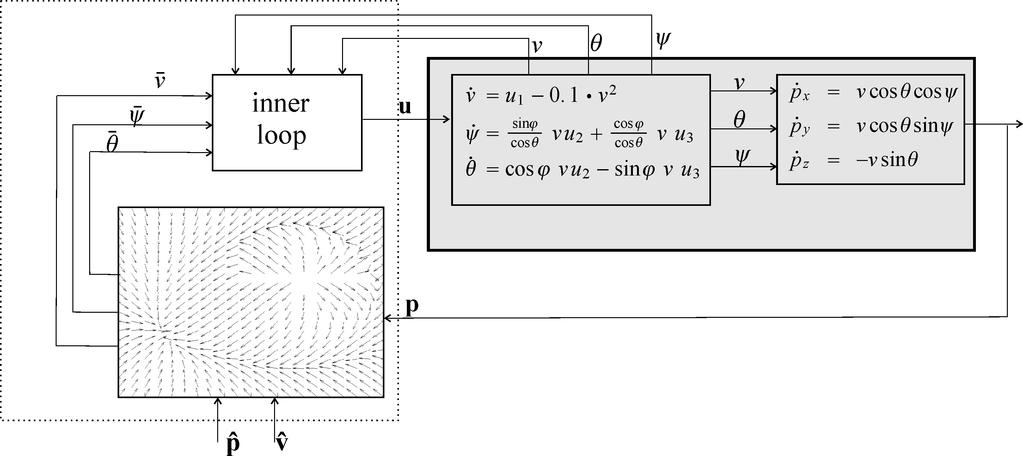
101 Without outliers X(k+1) =f k X(k) g 1 k (Y(k)), N(k).
102 4.3 Relaxed intersection
103
104 4.4 Robust localization
105 Define def f k:k (X) = X f k1 :k 2 +1(X) def = f k2 (f k1 :k 2 (X),N(k 2 )), k 1 k 2. The setf k1 :k 2 (X) represents the set of allx(k 2 ), consistent withx(k 1 ) X.
106 Consider the set state estimator X(k) = f 0:k (X(0)) ifk<m, (initialization step) X(k) = f k m:k (X(k m)) {q} f k i:k g 1 k i (Y(k i)) ifk m i {1,...,m}
107
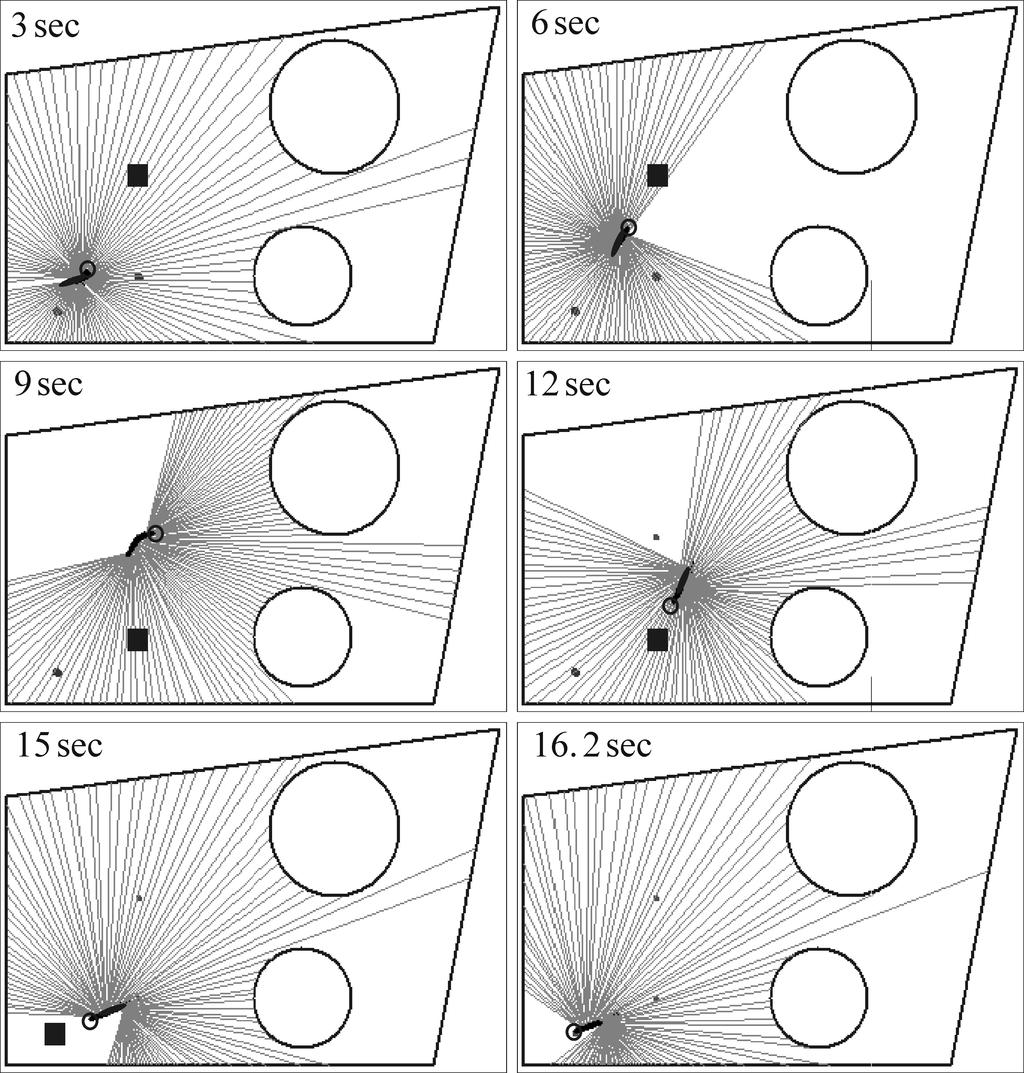
108 4.5 Application to localization
109 Sauc isse robot inside a swimming pool
110 The robot evolution is described by ẋ 1 = x 4 cosx 3 ẋ 2 = x 4 sinx 3 ẋ 3 = u 2 u 1 ẋ 4 = u 1 +u 2 x 4, wherex 1,x 2 are the coordinates of the robot center,x 3 is its orientation and x 4 is its speed. The inputs u 1 and u 2 are the accelerations provided by the propellers.
111 The system can be discretized byx k+1 =f k (x k ), where, f k x 1 x 2 x 3 x 4 = x 1 +δ.x 4.cos(x 3 ) x 2 +δ.x 4.sin(x 3 ) x 3 +δ.(u 2 (k) u 1 (k)) x 4 +δ.(u 1 (k)+u 2 (k) x 4 )

112 Underwater robot moving inside a pool
113
114
115
 collaborative")
116 5 Scout project Goal : (i) coordination of underwater robots ; (ii) collaborative behavior.
117 Supervisors: L. Jaulin, C. Aubry, S. Rohou, B. Zerr, J. Nicola, F. Le bars Compagny: RTsys (P. Raude) Students: G. Ricciardelli, L. Devigne, C. Guillemot, S. Pommier, T. Viravau, T. Le Mezo, B. Sultan, B. Moura, M. Fadlane, A. Bellaiche, T. Blanchard, U. Da rocha, G. Pinto, K. Machado.

118

119

120

121
122 5.1 Simulator

123 MOOS, MORSE, BLENDER, IBEX, Vibes, GIT
124 MOOS architecture
125 5.2 Controller
126
127 5.3 Localization Range only Based on interval analysis Robust with respect to outliers Distributed computation Low rate communication

128
129 Presentation of the scout project
130 5.4 Tests
131
132
Chapter 1: Interval computation
 Chapter 1: Interval computation July 8, 2017 Problem. Given f : R n R and a box [x] R n, prove that x [x],f (x) 0. Interval arithmetic can solve efficiently this problem. Example. Is the function f (x)
Chapter 1: Interval computation July 8, 2017 Problem. Given f : R n R and a box [x] R n, prove that x [x],f (x) 0. Interval arithmetic can solve efficiently this problem. Example. Is the function f (x)
Distributed localization and control of underwater robots
 Distributed localization and control of underwater robots L. Jaulin ENSTA Bretagne, LabSTICC Methods and Tools for Distributed Hybrid Systems DHS 2018, June 4, Palaiseau Interval analysis Problem. Given
Distributed localization and control of underwater robots L. Jaulin ENSTA Bretagne, LabSTICC Methods and Tools for Distributed Hybrid Systems DHS 2018, June 4, Palaiseau Interval analysis Problem. Given
Inner and outer approximation of capture basin using interval analysis
 Inner and outer approximation of capture basin using interval analysis M. Lhommeau 1 L. Jaulin 2 L. Hardouin 1 1 Laboratoire d'ingénierie des Systèmes Automatisés ISTIA - Université d'angers 62, av. Notre
Inner and outer approximation of capture basin using interval analysis M. Lhommeau 1 L. Jaulin 2 L. Hardouin 1 1 Laboratoire d'ingénierie des Systèmes Automatisés ISTIA - Université d'angers 62, av. Notre
GESMI, an interval-based software for submarine SLAM. Fabrice LE BARS
 GESMI, an interval-based software for submarine SLAM Fabrice LE BARS > Plan 1. Introduction 2. GESMI 3. Set membership approach used for SLAM 4. Demo 5. Conclusion 17/06/2010 2 Introduction 17/06/2010
GESMI, an interval-based software for submarine SLAM Fabrice LE BARS > Plan 1. Introduction 2. GESMI 3. Set membership approach used for SLAM 4. Demo 5. Conclusion 17/06/2010 2 Introduction 17/06/2010
Interval based 3D-mapping of an island with a sector-scan sonar
 Interval based 3D-mapping of an island with a sector-scan sonar Vincent Drevelle ENSTA Bretagne, Ocean Sensing and Lab-STICC, IHSEV SWIM 2014, June 11-12, Uppsala, Sweden V. Drevelle Interval based 3D-mapping
Interval based 3D-mapping of an island with a sector-scan sonar Vincent Drevelle ENSTA Bretagne, Ocean Sensing and Lab-STICC, IHSEV SWIM 2014, June 11-12, Uppsala, Sweden V. Drevelle Interval based 3D-mapping
Guaranteed simulation of nonlinear continuous-time dynamical systems using interval methods
 Guaranteed simulation of nonlinear continuous-time dynamical systems using interval methods L. Jaulin, A. Béthencourt, S. Rohou, F. Le Bars, B. Zerr, T. Le Mézo ENSTA Bretagne, LabSTICC 13 septembre 2017
Guaranteed simulation of nonlinear continuous-time dynamical systems using interval methods L. Jaulin, A. Béthencourt, S. Rohou, F. Le Bars, B. Zerr, T. Le Mézo ENSTA Bretagne, LabSTICC 13 septembre 2017
Contents. MATH 32B-2 (18W) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables. 1 Homework 1 - Solutions 3. 2 Homework 2 - Solutions 13
 (L) G. Liu / (TA) A. Zhou Calculus of Several Variables. 1 Homework 1 - Solutions 3. 2 Homework 2 - Solutions 13") MATH 32B-2 (8) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables Contents Homework - Solutions 3 2 Homework 2 - Solutions 3 3 Homework 3 - Solutions 9 MATH 32B-2 (8) (L) G. Liu / (TA) A. Zhou Calculus
MATH 32B-2 (8) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables Contents Homework - Solutions 3 2 Homework 2 - Solutions 3 3 Homework 3 - Solutions 9 MATH 32B-2 (8) (L) G. Liu / (TA) A. Zhou Calculus
Avoiding Fake Boundaries in Set Interval Computing
 Journal of Uncertain Systems Vol.11, No.2, pp.137-148, 2017 Online at: www.jus.org.uk Avoiding Fake Boundaries in Set Interval Computing Anthony Welte 1, Luc Jaulin 1, Martine Ceberio 2, Vladik Kreinovich
Journal of Uncertain Systems Vol.11, No.2, pp.137-148, 2017 Online at: www.jus.org.uk Avoiding Fake Boundaries in Set Interval Computing Anthony Welte 1, Luc Jaulin 1, Martine Ceberio 2, Vladik Kreinovich
Applied Interval Analysis
 Luc Jaulin, Michel Kieffer, Olivier Didrit and Eric Walter Applied Interval Analysis With Examples in Parameter and State Estimation, Robust Control and Robotics With 125 Figures Contents Preface Notation
Luc Jaulin, Michel Kieffer, Olivier Didrit and Eric Walter Applied Interval Analysis With Examples in Parameter and State Estimation, Robust Control and Robotics With 125 Figures Contents Preface Notation
Using constraint propagation for cooperative UAV localization from vision and ranging
 Using constraint propagation for cooperative UAV localization from vision and ranging Ide-Flore Kenmogne, Vincent Drevelle, and Eric Marchand Univ Rennes, Inria, CNRS, IRISA ide-flore.kenmogne@inria.fr,
Using constraint propagation for cooperative UAV localization from vision and ranging Ide-Flore Kenmogne, Vincent Drevelle, and Eric Marchand Univ Rennes, Inria, CNRS, IRISA ide-flore.kenmogne@inria.fr,
True/False. MATH 1C: SAMPLE EXAM 1 c Jeffrey A. Anderson ANSWER KEY
 MATH 1C: SAMPLE EXAM 1 c Jeffrey A. Anderson ANSWER KEY True/False 10 points: points each) For the problems below, circle T if the answer is true and circle F is the answer is false. After you ve chosen
MATH 1C: SAMPLE EXAM 1 c Jeffrey A. Anderson ANSWER KEY True/False 10 points: points each) For the problems below, circle T if the answer is true and circle F is the answer is false. After you ve chosen
On sufficient conditions of the injectivity : development of a numerical test algorithm via interval analysis
 On sufficient conditions of the injectivity : development of a numerical test algorithm via interval analysis S. Lagrange (lagrange@istia.univ-angers.fr) LISA, UFR Angers, 62 avenue Notre Dame du Lac,
On sufficient conditions of the injectivity : development of a numerical test algorithm via interval analysis S. Lagrange (lagrange@istia.univ-angers.fr) LISA, UFR Angers, 62 avenue Notre Dame du Lac,
Global Optimization based on Contractor Programming: an Overview of the IBEX library
 Global Optimization based on Contractor Programming: an Overview of the IBEX library Jordan Ninin ENSTA-Bretagne, LabSTIC, IHSEV team, 2 rue Francois Verny, 29806 Brest, France, jordan.ninin@ensta-bretagne.fr
Global Optimization based on Contractor Programming: an Overview of the IBEX library Jordan Ninin ENSTA-Bretagne, LabSTIC, IHSEV team, 2 rue Francois Verny, 29806 Brest, France, jordan.ninin@ensta-bretagne.fr
14.5 Directional Derivatives and the Gradient Vector
 14.5 Directional Derivatives and the Gradient Vector 1. Directional Derivatives. Recall z = f (x, y) and the partial derivatives f x and f y are defined as f (x 0 + h, y 0 ) f (x 0, y 0 ) f x (x 0, y 0
14.5 Directional Derivatives and the Gradient Vector 1. Directional Derivatives. Recall z = f (x, y) and the partial derivatives f x and f y are defined as f (x 0 + h, y 0 ) f (x 0, y 0 ) f x (x 0, y 0
MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question.
 Calculus III-Final review Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. Find the corresponding position vector. 1) Define the points P = (-,
Calculus III-Final review Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. Find the corresponding position vector. 1) Define the points P = (-,
Thick sets Contractors and separators Thick separators Test-case. Thick separators. L. Jaulin, B. Desrochers CoProd 2016, Uppsala.
 L. Jaulin, B. Desrochers CoProd 2016, Uppsala Thick sets A thin set is a subset of R n. A thick set X of R n is an interval of (P(R n ), ). X = X,X = {X P(R n ) X X X }. A thickset X is also the partition
L. Jaulin, B. Desrochers CoProd 2016, Uppsala Thick sets A thin set is a subset of R n. A thick set X of R n is an interval of (P(R n ), ). X = X,X = {X P(R n ) X X X }. A thickset X is also the partition
MASTER Mathématiques et Applications
 MASTER Mathématiques et Applications SPECIALITE : SYSTEMES DYNAMIQUES ET SIGNAUX Année 13/14 Benoît DESRCHERS Soutenu le 27 aout 14 Au sein de l'institut des Sciences et Techniques de l'ingénieurs d'angers
MASTER Mathématiques et Applications SPECIALITE : SYSTEMES DYNAMIQUES ET SIGNAUX Année 13/14 Benoît DESRCHERS Soutenu le 27 aout 14 Au sein de l'institut des Sciences et Techniques de l'ingénieurs d'angers
MATH. 2153, Spring 16, MWF 12:40 p.m. QUIZ 1 January 25, 2016 PRINT NAME A. Derdzinski Show all work. No calculators. The problem is worth 10 points.
 MATH. 2153, Spring 16, MWF 12:40 p.m. QUIZ 1 January 25, 2016 PRINT NAME A. Derdzinski Show all work. No calculators. The problem is worth 10 points. 1. Evaluate the area A of the triangle with the vertices
MATH. 2153, Spring 16, MWF 12:40 p.m. QUIZ 1 January 25, 2016 PRINT NAME A. Derdzinski Show all work. No calculators. The problem is worth 10 points. 1. Evaluate the area A of the triangle with the vertices
Quiz problem bank. Quiz 1 problems. 1. Find all solutions (x, y) to the following:
 to the following:") Quiz problem bank Quiz problems. Find all solutions x, y) to the following: xy x + y = x + 5x + 4y = ) x. Let gx) = ln. Find g x). sin x 3. Find the tangent line to fx) = xe x at x =. 4. Let hx) = x 3
Quiz problem bank Quiz problems. Find all solutions x, y) to the following: xy x + y = x + 5x + 4y = ) x. Let gx) = ln. Find g x). sin x 3. Find the tangent line to fx) = xe x at x =. 4. Let hx) = x 3
SPM Add Math Form 5 Chapter 3 Integration
 SPM Add Math Form Chapter Integration INDEFINITE INTEGRAL CHAPTER : INTEGRATION Integration as the reverse process of differentiation ) y if dy = x. Given that d Integral of ax n x + c = x, where c is
SPM Add Math Form Chapter Integration INDEFINITE INTEGRAL CHAPTER : INTEGRATION Integration as the reverse process of differentiation ) y if dy = x. Given that d Integral of ax n x + c = x, where c is
Kinematics of the Stewart Platform (Reality Check 1: page 67)
") MATH 5: Computer Project # - Due on September 7, Kinematics of the Stewart Platform (Reality Check : page 7) A Stewart platform consists of six variable length struts, or prismatic joints, supporting a
MATH 5: Computer Project # - Due on September 7, Kinematics of the Stewart Platform (Reality Check : page 7) A Stewart platform consists of six variable length struts, or prismatic joints, supporting a
SYSTEMS OF NONLINEAR EQUATIONS
 SYSTEMS OF NONLINEAR EQUATIONS Widely used in the mathematical modeling of real world phenomena. We introduce some numerical methods for their solution. For better intuition, we examine systems of two
SYSTEMS OF NONLINEAR EQUATIONS Widely used in the mathematical modeling of real world phenomena. We introduce some numerical methods for their solution. For better intuition, we examine systems of two
Determination of Inner and Outer Bounds of Reachable Sets
 Determination of Inner and Outer Bounds of Reachable Sets Francisco Rego (francisco.rego@aero.ist.utl.pt) Abstract - To verify the safety of a dynamic system, one important procedure is to compute its
Determination of Inner and Outer Bounds of Reachable Sets Francisco Rego (francisco.rego@aero.ist.utl.pt) Abstract - To verify the safety of a dynamic system, one important procedure is to compute its
Function f. Function f -1
 Page 1 REVIEW (1.7) What is an inverse function? Do all functions have inverses? An inverse function, f -1, is a kind of undoing function. If the initial function, f, takes the element a to the element
Page 1 REVIEW (1.7) What is an inverse function? Do all functions have inverses? An inverse function, f -1, is a kind of undoing function. If the initial function, f, takes the element a to the element
18.02 Final Exam. y = 0
 No books, notes or calculators. 5 problems, 50 points. 8.0 Final Exam Useful formula: cos (θ) = ( + cos(θ)) Problem. (0 points) a) (5 pts.) Find the equation in the form Ax + By + z = D of the plane P
No books, notes or calculators. 5 problems, 50 points. 8.0 Final Exam Useful formula: cos (θ) = ( + cos(θ)) Problem. (0 points) a) (5 pts.) Find the equation in the form Ax + By + z = D of the plane P
13.2 LIMITS AND CONTINUITY
 3.2 Limits and Continuity Contemporary Calculus 3.2 LIMITS AND CONTINUITY Our development of the properties and the calculus of functions z = f(x,y) of two (and more) variables parallels the development
3.2 Limits and Continuity Contemporary Calculus 3.2 LIMITS AND CONTINUITY Our development of the properties and the calculus of functions z = f(x,y) of two (and more) variables parallels the development
MAT203 OVERVIEW OF CONTENTS AND SAMPLE PROBLEMS
 MAT203 OVERVIEW OF CONTENTS AND SAMPLE PROBLEMS MAT203 covers essentially the same material as MAT201, but is more in depth and theoretical. Exam problems are often more sophisticated in scope and difficulty
MAT203 OVERVIEW OF CONTENTS AND SAMPLE PROBLEMS MAT203 covers essentially the same material as MAT201, but is more in depth and theoretical. Exam problems are often more sophisticated in scope and difficulty
= w. w u. u ; u + w. x x. z z. y y. v + w. . Remark. The formula stated above is very important in the theory of. surface integral.
 1 Chain rules 2 Directional derivative 3 Gradient Vector Field 4 Most Rapid Increase 5 Implicit Function Theorem, Implicit Differentiation 6 Lagrange Multiplier 7 Second Derivative Test Theorem Suppose
1 Chain rules 2 Directional derivative 3 Gradient Vector Field 4 Most Rapid Increase 5 Implicit Function Theorem, Implicit Differentiation 6 Lagrange Multiplier 7 Second Derivative Test Theorem Suppose
Hw 4 Due Feb 22. D(fg) x y z (
 x y z (") Hw 4 Due Feb 22 2.2 Exercise 7,8,10,12,15,18,28,35,36,46 2.3 Exercise 3,11,39,40,47(b) 2.4 Exercise 6,7 Use both the direct method and product rule to calculate where f(x, y, z) = 3x, g(x, y, z) = ( 1
Hw 4 Due Feb 22 2.2 Exercise 7,8,10,12,15,18,28,35,36,46 2.3 Exercise 3,11,39,40,47(b) 2.4 Exercise 6,7 Use both the direct method and product rule to calculate where f(x, y, z) = 3x, g(x, y, z) = ( 1
MATH 234. Excercises on Integration in Several Variables. I. Double Integrals
 MATH 234 Excercises on Integration in everal Variables I. Double Integrals Problem 1. D = {(x, y) : y x 1, 0 y 1}. Compute D ex3 da. Problem 2. Find the volume of the solid bounded above by the plane 3x
MATH 234 Excercises on Integration in everal Variables I. Double Integrals Problem 1. D = {(x, y) : y x 1, 0 y 1}. Compute D ex3 da. Problem 2. Find the volume of the solid bounded above by the plane 3x
Matlab Notes for Calculus 3. Lia Vas
 Matlab Notes for Calculus 3 Lia Vas Content 0. Review of Matlab. Representing Functions. Solving Equations. Basic Graphing. Differentiation and Integration. 1. Vectors. 2. Differentiation of Multi-variable
Matlab Notes for Calculus 3 Lia Vas Content 0. Review of Matlab. Representing Functions. Solving Equations. Basic Graphing. Differentiation and Integration. 1. Vectors. 2. Differentiation of Multi-variable
MAC2313 Test 3 A E g(x, y, z) dy dx dz
 dy dx dz") MAC2313 Test 3 A (5 pts) 1. If the function g(x, y, z) is integrated over the cylindrical solid bounded by x 2 + y 2 = 3, z = 1, and z = 7, the correct integral in Cartesian coordinates is given by: A.
MAC2313 Test 3 A (5 pts) 1. If the function g(x, y, z) is integrated over the cylindrical solid bounded by x 2 + y 2 = 3, z = 1, and z = 7, the correct integral in Cartesian coordinates is given by: A.
302 CHAPTER 3. FUNCTIONS OF SEVERAL VARIABLES. 4. Function of several variables, their domain. 6. Limit of a function of several variables
 302 CHAPTER 3. FUNCTIONS OF SEVERAL VARIABLES 3.8 Chapter Review 3.8.1 Concepts to Know You should have an understanding of, and be able to explain the concepts listed below. 1. Boundary and interior points
302 CHAPTER 3. FUNCTIONS OF SEVERAL VARIABLES 3.8 Chapter Review 3.8.1 Concepts to Know You should have an understanding of, and be able to explain the concepts listed below. 1. Boundary and interior points
. 1. Chain rules. Directional derivative. Gradient Vector Field. Most Rapid Increase. Implicit Function Theorem, Implicit Differentiation
 1 Chain rules 2 Directional derivative 3 Gradient Vector Field 4 Most Rapid Increase 5 Implicit Function Theorem, Implicit Differentiation 6 Lagrange Multiplier 7 Second Derivative Test Theorem Suppose
1 Chain rules 2 Directional derivative 3 Gradient Vector Field 4 Most Rapid Increase 5 Implicit Function Theorem, Implicit Differentiation 6 Lagrange Multiplier 7 Second Derivative Test Theorem Suppose
Gilles Chabert Ecole des Mines de Nantes Dec 2014
 www.ibex-lib.org Gilles Chabert Ecole des Mines de Nantes Dec 2014 Outline Introduction Contractors Forward-backward XTaylor Q-intersection Getting started Conclusion Introduction IBEX is an open-source
www.ibex-lib.org Gilles Chabert Ecole des Mines de Nantes Dec 2014 Outline Introduction Contractors Forward-backward XTaylor Q-intersection Getting started Conclusion Introduction IBEX is an open-source
Answer sheet: Second Midterm for Math 2339
 Answer sheet: Second Midterm for Math 2339 October 26, 2010 Problem 1. True or false: (check one of the box, and briefly explain why) (1) If a twice differentiable f(x,y) satisfies f x (a,b) = f y (a,b)
Answer sheet: Second Midterm for Math 2339 October 26, 2010 Problem 1. True or false: (check one of the box, and briefly explain why) (1) If a twice differentiable f(x,y) satisfies f x (a,b) = f y (a,b)
Math 253, Section 102, Fall 2006 Practice Final Solutions
 Math 253, Section 102, Fall 2006 Practice Final Solutions 1 2 1. Determine whether the two lines L 1 and L 2 described below intersect. If yes, find the point of intersection. If not, say whether they
Math 253, Section 102, Fall 2006 Practice Final Solutions 1 2 1. Determine whether the two lines L 1 and L 2 described below intersect. If yes, find the point of intersection. If not, say whether they
CSC Discrete Math I, Spring Sets
 CSC 125 - Discrete Math I, Spring 2017 Sets Sets A set is well-defined, unordered collection of objects The objects in a set are called the elements, or members, of the set A set is said to contain its
CSC 125 - Discrete Math I, Spring 2017 Sets Sets A set is well-defined, unordered collection of objects The objects in a set are called the elements, or members, of the set A set is said to contain its
Math 113 Calculus III Final Exam Practice Problems Spring 2003
 Math 113 Calculus III Final Exam Practice Problems Spring 23 1. Let g(x, y, z) = 2x 2 + y 2 + 4z 2. (a) Describe the shapes of the level surfaces of g. (b) In three different graphs, sketch the three cross
Math 113 Calculus III Final Exam Practice Problems Spring 23 1. Let g(x, y, z) = 2x 2 + y 2 + 4z 2. (a) Describe the shapes of the level surfaces of g. (b) In three different graphs, sketch the three cross
Practice problems. 1. Given a = 3i 2j and b = 2i + j. Write c = i + j in terms of a and b.
 Practice problems 1. Given a = 3i 2j and b = 2i + j. Write c = i + j in terms of a and b. 1, 1 = c 1 3, 2 + c 2 2, 1. Solve c 1, c 2. 2. Suppose a is a vector in the plane. If the component of the a in
Practice problems 1. Given a = 3i 2j and b = 2i + j. Write c = i + j in terms of a and b. 1, 1 = c 1 3, 2 + c 2 2, 1. Solve c 1, c 2. 2. Suppose a is a vector in the plane. If the component of the a in
If the center of the sphere is the origin the the equation is. x y z 2ux 2vy 2wz d 0 -(2)
") Sphere Definition: A sphere is the locus of a point which remains at a constant distance from a fixed point. The fixed point is called the centre and the constant distance is the radius of the sphere.
Sphere Definition: A sphere is the locus of a point which remains at a constant distance from a fixed point. The fixed point is called the centre and the constant distance is the radius of the sphere.
Topology problem set Integration workshop 2010
 Topology problem set Integration workshop 2010 July 28, 2010 1 Topological spaces and Continuous functions 1.1 If T 1 and T 2 are two topologies on X, show that (X, T 1 T 2 ) is also a topological space.
Topology problem set Integration workshop 2010 July 28, 2010 1 Topological spaces and Continuous functions 1.1 If T 1 and T 2 are two topologies on X, show that (X, T 1 T 2 ) is also a topological space.
ibex_snippets.cpp #include "ibex.h" using namespace std; using namespace ibex;
 #include "ibex.h" using namespace std; using namespace ibex; int main() Example #1 Basic interval arithmetic > create the interval x=[1,2] and y=[3,4] > calculate the interval sum x+y > calculate interval
#include "ibex.h" using namespace std; using namespace ibex; int main() Example #1 Basic interval arithmetic > create the interval x=[1,2] and y=[3,4] > calculate the interval sum x+y > calculate interval
Quiz 6 Practice Problems
 Quiz 6 Practice Problems Practice problems are similar, both in difficulty and in scope, to the type of problems you will see on the quiz. Problems marked with a are for your entertainment and are not
Quiz 6 Practice Problems Practice problems are similar, both in difficulty and in scope, to the type of problems you will see on the quiz. Problems marked with a are for your entertainment and are not
Interval Analysis for Guaranteed Set Estimation
 1/54 Interval Analysis for Guaranteed Set Estimation MaGiX@LiX September 2011 Eric Walter (joint work with L. Jaulin, M. Kieffer et al.) Laboratoire des Signaux et Systèmes CNRS Supélec Univ Paris-Sud
1/54 Interval Analysis for Guaranteed Set Estimation MaGiX@LiX September 2011 Eric Walter (joint work with L. Jaulin, M. Kieffer et al.) Laboratoire des Signaux et Systèmes CNRS Supélec Univ Paris-Sud
f x = 2e xy +y(2x+y)e xy = (2+2xy+y 2 )e xy.
e xy = (2+2xy+y 2 )e xy.") gri (rg38778) Homework 11 gri (11111) 1 This print-out should have 3 questions. Multiple-choice questions may continue on the next column or page find all choices before answering. Find lim (x,y) (,) 1
gri (rg38778) Homework 11 gri (11111) 1 This print-out should have 3 questions. Multiple-choice questions may continue on the next column or page find all choices before answering. Find lim (x,y) (,) 1
3. The domain of a function of 2 or 3 variables is a set of pts in the plane or space respectively.
 Math 2204 Multivariable Calculus Chapter 14: Partial Derivatives Sec. 14.1: Functions of Several Variables I. Functions and Variables A. Def n : Suppose D is a set of n-tuples of real numbers (x 1, x 2,
Math 2204 Multivariable Calculus Chapter 14: Partial Derivatives Sec. 14.1: Functions of Several Variables I. Functions and Variables A. Def n : Suppose D is a set of n-tuples of real numbers (x 1, x 2,
Chapter 6. Curves and Surfaces. 6.1 Graphs as Surfaces
 Chapter 6 Curves and Surfaces In Chapter 2 a plane is defined as the zero set of a linear function in R 3. It is expected a surface is the zero set of a differentiable function in R n. To motivate, graphs
Chapter 6 Curves and Surfaces In Chapter 2 a plane is defined as the zero set of a linear function in R 3. It is expected a surface is the zero set of a differentiable function in R n. To motivate, graphs
GT "Calcul Ensembliste"
 GT "Calcul Ensembliste" Beyond the bounded error framework for non linear state estimation Fahed Abdallah Université de Technologie de Compiègne 9 Décembre 2010 Fahed Abdallah GT "Calcul Ensembliste" 9
GT "Calcul Ensembliste" Beyond the bounded error framework for non linear state estimation Fahed Abdallah Université de Technologie de Compiègne 9 Décembre 2010 Fahed Abdallah GT "Calcul Ensembliste" 9
Math 126 Winter CHECK that your exam contains 8 problems.
 Math 126 Winter 2016 Your Name Your Signature Student ID # Quiz Section Professor s Name TA s Name CHECK that your exam contains 8 problems. This exam is closed book. You may use one 8 1 11 sheet of hand-written
Math 126 Winter 2016 Your Name Your Signature Student ID # Quiz Section Professor s Name TA s Name CHECK that your exam contains 8 problems. This exam is closed book. You may use one 8 1 11 sheet of hand-written
Absolute Scale Structure from Motion Using a Refractive Plate
 Absolute Scale Structure from Motion Using a Refractive Plate Akira Shibata, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama Abstract Three-dimensional (3D) measurement methods are becoming more and
Absolute Scale Structure from Motion Using a Refractive Plate Akira Shibata, Hiromitsu Fujii, Atsushi Yamashita and Hajime Asama Abstract Three-dimensional (3D) measurement methods are becoming more and
Summer 2017 MATH Suggested Solution to Exercise Find the tangent hyperplane passing the given point P on each of the graphs: (a)
") Smmer 2017 MATH2010 1 Sggested Soltion to Exercise 6 1 Find the tangent hyperplane passing the given point P on each of the graphs: (a) z = x 2 y 2 ; y = z log x z P (2, 3, 5), P (1, 1, 1), (c) w = sin(x
Smmer 2017 MATH2010 1 Sggested Soltion to Exercise 6 1 Find the tangent hyperplane passing the given point P on each of the graphs: (a) z = x 2 y 2 ; y = z log x z P (2, 3, 5), P (1, 1, 1), (c) w = sin(x
Math 113 Exam 1 Practice
 Math Exam Practice January 6, 00 Exam will cover sections 6.-6.5 and 7.-7.5 This sheet has three sections. The first section will remind you about techniques and formulas that you should know. The second
Math Exam Practice January 6, 00 Exam will cover sections 6.-6.5 and 7.-7.5 This sheet has three sections. The first section will remind you about techniques and formulas that you should know. The second
MATH 261 FALL 2000 FINAL EXAM INSTRUCTIONS. 1. This test booklet has 14 pages including this one. There are 25 questions, each worth 8 points.
 MATH 261 FALL 2 FINAL EXAM STUDENT NAME - STUDENT ID - RECITATION HOUR - RECITATION INSTRUCTOR INSTRUCTOR - INSTRUCTIONS 1. This test booklet has 14 pages including this one. There are 25 questions, each
MATH 261 FALL 2 FINAL EXAM STUDENT NAME - STUDENT ID - RECITATION HOUR - RECITATION INSTRUCTOR INSTRUCTOR - INSTRUCTIONS 1. This test booklet has 14 pages including this one. There are 25 questions, each
Robotics. Lecture 8: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 8: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 8: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
What is log a a equal to?
 How would you differentiate a function like y = sin ax? What is log a a equal to? How do you prove three 3-D points are collinear? What is the general equation of a straight line passing through (a,b)
How would you differentiate a function like y = sin ax? What is log a a equal to? How do you prove three 3-D points are collinear? What is the general equation of a straight line passing through (a,b)
A new approach for computing with fuzzy sets using interval analysis
 A new approach for computing with fuzzy sets using interval analysis Arunas Mazeika E 3 I 2 - EA 3876 ENSIETA 2 rue François Verny 29806 Brest Cedex 9, France Email: mazeikar@ensieta.fr Luc Jaulin E 3
A new approach for computing with fuzzy sets using interval analysis Arunas Mazeika E 3 I 2 - EA 3876 ENSIETA 2 rue François Verny 29806 Brest Cedex 9, France Email: mazeikar@ensieta.fr Luc Jaulin E 3
ECS 20 Lecture 9 Fall Oct 2013 Phil Rogaway
 ECS 20 Lecture 9 Fall 2013 24 Oct 2013 Phil Rogaway Today: o Sets of strings (languages) o Regular expressions Distinguished Lecture after class : Some Hash-Based Data Structures and Algorithms Everyone
ECS 20 Lecture 9 Fall 2013 24 Oct 2013 Phil Rogaway Today: o Sets of strings (languages) o Regular expressions Distinguished Lecture after class : Some Hash-Based Data Structures and Algorithms Everyone
State estimation using interval analysis and belief function theory: Application to dynamic vehicle localization
 State estimation using interval analysis and belief function theory: Application to dynamic vehicle localization Ghalia Nassreddine, Fahed Abdallah, Thierry Denoeux To cite this version: Ghalia Nassreddine,
State estimation using interval analysis and belief function theory: Application to dynamic vehicle localization Ghalia Nassreddine, Fahed Abdallah, Thierry Denoeux To cite this version: Ghalia Nassreddine,
The kidnapping Problem of Mobile Robots: A Set Membership Approach.
 The kidnapping Problem of Mobile Robots: A Set Membership Approach. Rémy GUYONNEAU, Sébastien LAGRANGE, Laurent HARDOUIN and Philippe LUCIDARME. Laboratoire d Ingénierie des Systèmes Automatisés (LISA),
The kidnapping Problem of Mobile Robots: A Set Membership Approach. Rémy GUYONNEAU, Sébastien LAGRANGE, Laurent HARDOUIN and Philippe LUCIDARME. Laboratoire d Ingénierie des Systèmes Automatisés (LISA),
Elementary Topology. Note: This problem list was written primarily by Phil Bowers and John Bryant. It has been edited by a few others along the way.
 Elementary Topology Note: This problem list was written primarily by Phil Bowers and John Bryant. It has been edited by a few others along the way. Definition. properties: (i) T and X T, A topology on
Elementary Topology Note: This problem list was written primarily by Phil Bowers and John Bryant. It has been edited by a few others along the way. Definition. properties: (i) T and X T, A topology on
Green Globs And Graphing Equations
 Green Globs And Graphing Equations Green Globs and Graphing Equations has four parts to it which serve as a tool, a review or testing device, and two games. The menu choices are: Equation Plotter which
Green Globs And Graphing Equations Green Globs and Graphing Equations has four parts to it which serve as a tool, a review or testing device, and two games. The menu choices are: Equation Plotter which
Set-Membership Approach to the Kidnapped Robot Problem
 Set-Membership Approach to the Kidnapped Robot Problem Benoît Desrochers 1,2, Simon Lacroix 1,3 and Luc Jaulin 2 Abstract This article depicts an algorithm which matches the output of a Lidar with an initial
Set-Membership Approach to the Kidnapped Robot Problem Benoît Desrochers 1,2, Simon Lacroix 1,3 and Luc Jaulin 2 Abstract This article depicts an algorithm which matches the output of a Lidar with an initial
3. The three points (2, 4, 1), (1, 2, 2) and (5, 2, 2) determine a plane. Which of the following points is in that plane?
, (1, 2, 2) and (5, 2, 2) determine a plane. Which of the following points is in that plane?") Math 4 Practice Problems for Midterm. A unit vector that is perpendicular to both V =, 3, and W = 4,, is (a) V W (b) V W (c) 5 6 V W (d) 3 6 V W (e) 7 6 V W. In three dimensions, the graph of the equation
Math 4 Practice Problems for Midterm. A unit vector that is perpendicular to both V =, 3, and W = 4,, is (a) V W (b) V W (c) 5 6 V W (d) 3 6 V W (e) 7 6 V W. In three dimensions, the graph of the equation
Introduction to IBEX. Jordan Ninin LAB-STICC / ENSTA-Bretagne Brest, France
 Introduction to IBEX Jordan Ninin LAB-STICC / ENSTA-Bretagne Brest, France Jan, 2014 Jordan Ninin IBEX Jan, 2014 1 / 51 First Use Progamming Langage: C++ using your favorite editor (Eclipse, QtCreator,
Introduction to IBEX Jordan Ninin LAB-STICC / ENSTA-Bretagne Brest, France Jan, 2014 Jordan Ninin IBEX Jan, 2014 1 / 51 First Use Progamming Langage: C++ using your favorite editor (Eclipse, QtCreator,
) in the k-th subbox. The mass of the k-th subbox is M k δ(x k, y k, z k ) V k. Thus,
 in the k-th subbox. The mass of the k-th subbox is M k δ(x k, y k, z k ) V k. Thus,") 1 Triple Integrals Mass problem. Find the mass M of a solid whose density (the mass per unit volume) is a continuous nonnegative function δ(x, y, z). 1. Divide the box enclosing into subboxes, and exclude
1 Triple Integrals Mass problem. Find the mass M of a solid whose density (the mass per unit volume) is a continuous nonnegative function δ(x, y, z). 1. Divide the box enclosing into subboxes, and exclude
Math 265 Exam 3 Solutions
 C Roettger, Fall 16 Math 265 Exam 3 Solutions Problem 1 Let D be the region inside the circle r 5 sin θ but outside the cardioid r 2 + sin θ. Find the area of D. Note that r and θ denote polar coordinates.
C Roettger, Fall 16 Math 265 Exam 3 Solutions Problem 1 Let D be the region inside the circle r 5 sin θ but outside the cardioid r 2 + sin θ. Find the area of D. Note that r and θ denote polar coordinates.
Practice problems from old exams for math 233 William H. Meeks III December 21, 2009
 Practice problems from old exams for math 233 William H. Meeks III December 21, 2009 Disclaimer: Your instructor covers far more materials that we can possibly fit into a four/five questions exams. These
Practice problems from old exams for math 233 William H. Meeks III December 21, 2009 Disclaimer: Your instructor covers far more materials that we can possibly fit into a four/five questions exams. These
Exam 3 SCORE. MA 114 Exam 3 Spring Section and/or TA:
 MA 114 Exam 3 Spring 217 Exam 3 Name: Section and/or TA: Last Four Digits of Student ID: Do not remove this answer page you will return the whole exam. You will be allowed two hours to complete this test.
MA 114 Exam 3 Spring 217 Exam 3 Name: Section and/or TA: Last Four Digits of Student ID: Do not remove this answer page you will return the whole exam. You will be allowed two hours to complete this test.
Directional Derivatives. Directional Derivatives. Directional Derivatives. Directional Derivatives. Directional Derivatives. Directional Derivatives
 Recall that if z = f(x, y), then the partial derivatives f x and f y are defined as and represent the rates of change of z in the x- and y-directions, that is, in the directions of the unit vectors i and
Recall that if z = f(x, y), then the partial derivatives f x and f y are defined as and represent the rates of change of z in the x- and y-directions, that is, in the directions of the unit vectors i and
2 Second Derivatives. As we have seen, a function f (x, y) of two variables has four different partial derivatives: f xx. f yx. f x y.
 of two variables has four different partial derivatives: f xx. f yx. f x y.") 2 Second Derivatives As we have seen, a function f (x, y) of two variables has four different partial derivatives: (x, y), (x, y), f yx (x, y), (x, y) It is convenient to gather all four of these into
2 Second Derivatives As we have seen, a function f (x, y) of two variables has four different partial derivatives: (x, y), (x, y), f yx (x, y), (x, y) It is convenient to gather all four of these into
Volumes of Solids of Revolution Lecture #6 a
 Volumes of Solids of Revolution Lecture #6 a Sphereoid Parabaloid Hyperboloid Whateveroid Volumes Calculating 3-D Space an Object Occupies Take a cross-sectional slice. Compute the area of the slice. Multiply
Volumes of Solids of Revolution Lecture #6 a Sphereoid Parabaloid Hyperboloid Whateveroid Volumes Calculating 3-D Space an Object Occupies Take a cross-sectional slice. Compute the area of the slice. Multiply
PURE MATHEMATICS 212 Multivariable Calculus CONTENTS. Page. 1. Assignment Summary... i 2. Introduction Timetable Assignments...
 PURE MATHEMATICS 212 Multivariable Calculus CONTENTS Page 1. Assignment Summary... i 2. Introduction...1 3. Timetable... 3 4. Assignments...5 i PMTH212, Multivariable Calculus Assignment Summary 2009
PURE MATHEMATICS 212 Multivariable Calculus CONTENTS Page 1. Assignment Summary... i 2. Introduction...1 3. Timetable... 3 4. Assignments...5 i PMTH212, Multivariable Calculus Assignment Summary 2009
f (Pijk ) V. may form the Riemann sum: . Definition. The triple integral of f over the rectangular box B is defined to f (x, y, z) dv = lim
 V. may form the Riemann sum: . Definition. The triple integral of f over the rectangular box B is defined to f (x, y, z) dv = lim") Chapter 14 Multiple Integrals..1 Double Integrals, Iterated Integrals, Cross-sections.2 Double Integrals over more general regions, Definition, Evaluation of Double Integrals, Properties of Double Integrals.3
Chapter 14 Multiple Integrals..1 Double Integrals, Iterated Integrals, Cross-sections.2 Double Integrals over more general regions, Definition, Evaluation of Double Integrals, Properties of Double Integrals.3
Total. Math 2130 Practice Final (Spring 2017) (1) (2) (3) (4) (5) (6) (7) (8)
 (1) (2) (3) (4) (5) (6) (7) (8)") Math 130 Practice Final (Spring 017) Before the exam: Do not write anything on this page. Do not open the exam. Turn off your cell phone. Make sure your books, notes, and electronics are not visible during
Math 130 Practice Final (Spring 017) Before the exam: Do not write anything on this page. Do not open the exam. Turn off your cell phone. Make sure your books, notes, and electronics are not visible during
Sets 1. The things in a set are called the elements of it. If x is an element of the set S, we say
 Sets 1 Where does mathematics start? What are the ideas which come first, in a logical sense, and form the foundation for everything else? Can we get a very small number of basic ideas? Can we reduce it
Sets 1 Where does mathematics start? What are the ideas which come first, in a logical sense, and form the foundation for everything else? Can we get a very small number of basic ideas? Can we reduce it
Chapter 15 Vector Calculus
 Chapter 15 Vector Calculus 151 Vector Fields 152 Line Integrals 153 Fundamental Theorem and Independence of Path 153 Conservative Fields and Potential Functions 154 Green s Theorem 155 urface Integrals
Chapter 15 Vector Calculus 151 Vector Fields 152 Line Integrals 153 Fundamental Theorem and Independence of Path 153 Conservative Fields and Potential Functions 154 Green s Theorem 155 urface Integrals
MATH 104 Sample problems for first exam - Fall MATH 104 First Midterm Exam - Fall (d) 256 3
 256 3") MATH 14 Sample problems for first exam - Fall 1 MATH 14 First Midterm Exam - Fall 1. Find the area between the graphs of y = 9 x and y = x + 1. (a) 4 (b) (c) (d) 5 (e) 4 (f) 81. A solid has as its base
MATH 14 Sample problems for first exam - Fall 1 MATH 14 First Midterm Exam - Fall 1. Find the area between the graphs of y = 9 x and y = x + 1. (a) 4 (b) (c) (d) 5 (e) 4 (f) 81. A solid has as its base
= f (a, b) + (hf x + kf y ) (a,b) +
 + (hf x + kf y ) (a,b) +") Chapter 14 Multiple Integrals 1 Double Integrals, Iterated Integrals, Cross-sections 2 Double Integrals over more general regions, Definition, Evaluation of Double Integrals, Properties of Double Integrals
Chapter 14 Multiple Integrals 1 Double Integrals, Iterated Integrals, Cross-sections 2 Double Integrals over more general regions, Definition, Evaluation of Double Integrals, Properties of Double Integrals
A boundary integral method for the three-dimensional heat equation subject to specification of energy
 A boundary integral method for the three-dimensional heat equation subject to specification of energy W. T. Ang Computational and Mathematical Sciences Group Faculty of Information Technology Universiti
A boundary integral method for the three-dimensional heat equation subject to specification of energy W. T. Ang Computational and Mathematical Sciences Group Faculty of Information Technology Universiti
LECTURE 0: Introduction and Background
 1 LECTURE 0: Introduction and Background September 10, 2012 1 Computational science The role of computational science has become increasingly significant during the last few decades. It has become the
1 LECTURE 0: Introduction and Background September 10, 2012 1 Computational science The role of computational science has become increasingly significant during the last few decades. It has become the
Robust indoor loca/on tracking via interval analysis
 Robust indoor loca/on tracking via interval analysis Mohamed- Hédi AMRI, Yasmina BECIS, Didier AUBRY & Nacim RAMDANI Université d Orléans, Bourges, France.!! SWIM 2015, Praha 9-11 June 2015 2 Outline n
Robust indoor loca/on tracking via interval analysis Mohamed- Hédi AMRI, Yasmina BECIS, Didier AUBRY & Nacim RAMDANI Université d Orléans, Bourges, France.!! SWIM 2015, Praha 9-11 June 2015 2 Outline n
Answer sheet: Second Midterm for Math 2339
 Answer sheet: Second Midterm for Math 2339 March 31, 2009 Problem 1. Let (a) f(x,y,z) = ln(z x 2 y 2 ). Evaluate f(1, 1, 2 + e). f(1, 1, 2 + e) = ln(2 + e 1 1) = lne = 1 (b) Find the domain of f. dom(f)
Answer sheet: Second Midterm for Math 2339 March 31, 2009 Problem 1. Let (a) f(x,y,z) = ln(z x 2 y 2 ). Evaluate f(1, 1, 2 + e). f(1, 1, 2 + e) = ln(2 + e 1 1) = lne = 1 (b) Find the domain of f. dom(f)
Introduction to PDEs: Notation, Terminology and Key Concepts
 Chapter 1 Introduction to PDEs: Notation, Terminology and Key Concepts 1.1 Review 1.1.1 Goal The purpose of this section is to briefly review notation as well as basic concepts from calculus. We will also
Chapter 1 Introduction to PDEs: Notation, Terminology and Key Concepts 1.1 Review 1.1.1 Goal The purpose of this section is to briefly review notation as well as basic concepts from calculus. We will also
14.6 Directional Derivatives and the Gradient Vector
 14 Partial Derivatives 14.6 and the Gradient Vector Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. and the Gradient Vector In this section we introduce
14 Partial Derivatives 14.6 and the Gradient Vector Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. and the Gradient Vector In this section we introduce
Robust Fault Detection and Isolation applied to Indoor Localization
 Robust Fault Detection and Isolation applied to Indoor Localization Mohamed-Hédi Amri, Didier Aubry, Yasmina Becis, Nacim Ramdani Univ. Orléans, PRISME EA 4229, INSA-CVL, F45072, Orléans, France (e-mail:
Robust Fault Detection and Isolation applied to Indoor Localization Mohamed-Hédi Amri, Didier Aubry, Yasmina Becis, Nacim Ramdani Univ. Orléans, PRISME EA 4229, INSA-CVL, F45072, Orléans, France (e-mail:
Reals 1. Floating-point numbers and their properties. Pitfalls of numeric computation. Horner's method. Bisection. Newton's method.
 Reals 1 13 Reals Floating-point numbers and their properties. Pitfalls of numeric computation. Horner's method. Bisection. Newton's method. 13.1 Floating-point numbers Real numbers, those declared to be
Reals 1 13 Reals Floating-point numbers and their properties. Pitfalls of numeric computation. Horner's method. Bisection. Newton's method. 13.1 Floating-point numbers Real numbers, those declared to be
Introduction to the Algebra of Separators with Application to Path Planning
 ENGINEERING APPLICATIONS OF ARTIFICIAL INTELLIGENCE, VOL. 33, PP 141-147, AUGUST 2014 1 Introduction to the Algebra of Separators with Application to Path Planning Luc Jaulin and Benoît Desrochers ENSTA-Bretagne,
ENGINEERING APPLICATIONS OF ARTIFICIAL INTELLIGENCE, VOL. 33, PP 141-147, AUGUST 2014 1 Introduction to the Algebra of Separators with Application to Path Planning Luc Jaulin and Benoît Desrochers ENSTA-Bretagne,
Multivariate Calculus: Review Problems for Examination Two
 Multivariate Calculus: Review Problems for Examination Two Note: Exam Two is on Tuesday, August 16. The coverage is multivariate differential calculus and double integration. You should review the double
Multivariate Calculus: Review Problems for Examination Two Note: Exam Two is on Tuesday, August 16. The coverage is multivariate differential calculus and double integration. You should review the double
The kidnapping Problem of Mobile Robots: A Set Membership Approach.
 The kidnapping Problem of Mobile Robots: A Set Membership Approach. Rémy GUYONNEAU, Sébastien LAGRANGE, Laurent HARDOUIN and Philippe LUCIDARME. Laboratoire d Ingénierie des Systèmes Automatisés (LISA),
The kidnapping Problem of Mobile Robots: A Set Membership Approach. Rémy GUYONNEAU, Sébastien LAGRANGE, Laurent HARDOUIN and Philippe LUCIDARME. Laboratoire d Ingénierie des Systèmes Automatisés (LISA),
TEST 3 REVIEW DAVID BEN MCREYNOLDS
 TEST 3 REVIEW DAVID BEN MCREYNOLDS 1. Vectors 1.1. Form the vector starting at the point P and ending at the point Q: P = (0, 0, 0), Q = (1,, 3). P = (1, 5, 3), Q = (8, 18, 0). P = ( 3, 1, 1), Q = (, 4,
TEST 3 REVIEW DAVID BEN MCREYNOLDS 1. Vectors 1.1. Form the vector starting at the point P and ending at the point Q: P = (0, 0, 0), Q = (1,, 3). P = (1, 5, 3), Q = (8, 18, 0). P = ( 3, 1, 1), Q = (, 4,
A Little Point Set Topology
 A Little Point Set Topology A topological space is a generalization of a metric space that allows one to talk about limits, convergence, continuity and so on without requiring the concept of a distance
A Little Point Set Topology A topological space is a generalization of a metric space that allows one to talk about limits, convergence, continuity and so on without requiring the concept of a distance
ARML Practice Problems Arvind Thiagarajan, May 7, 2006
 1 Geometry Problems ARML Practice Problems Arvind Thiagarajan, 005-006 May 7, 006 1. Find the coordinates of the point on the circle with equation (x 6) + (y 5) = 5 that is nearest the point (, 11). (TJ
1 Geometry Problems ARML Practice Problems Arvind Thiagarajan, 005-006 May 7, 006 1. Find the coordinates of the point on the circle with equation (x 6) + (y 5) = 5 that is nearest the point (, 11). (TJ
Math 21a Tangent Lines and Planes Fall, What do we know about the gradient f? Tangent Lines to Curves in the Plane.
 Math 21a Tangent Lines and Planes Fall, 2016 What do we know about the gradient f? Tangent Lines to Curves in the Plane. 1. For each of the following curves, find the tangent line to the curve at the point
Math 21a Tangent Lines and Planes Fall, 2016 What do we know about the gradient f? Tangent Lines to Curves in the Plane. 1. For each of the following curves, find the tangent line to the curve at the point
Partial Derivatives. Partial Derivatives. Partial Derivatives. Partial Derivatives. Partial Derivatives. Partial Derivatives
 In general, if f is a function of two variables x and y, suppose we let only x vary while keeping y fixed, say y = b, where b is a constant. By the definition of a derivative, we have Then we are really
In general, if f is a function of two variables x and y, suppose we let only x vary while keeping y fixed, say y = b, where b is a constant. By the definition of a derivative, we have Then we are really
Robotics. Lecture 7: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Numerical Methods Lecture 1
 Numerical Methods Lecture 1 Basics of MATLAB by Pavel Ludvík The recommended textbook: Numerical Methods Lecture 1 by Pavel Ludvík 2 / 30 The recommended textbook: Title: Numerical methods with worked
Numerical Methods Lecture 1 Basics of MATLAB by Pavel Ludvík The recommended textbook: Numerical Methods Lecture 1 by Pavel Ludvík 2 / 30 The recommended textbook: Title: Numerical methods with worked
4. Definition: topological space, open set, topology, trivial topology, discrete topology.
 Topology Summary Note to the reader. If a statement is marked with [Not proved in the lecture], then the statement was stated but not proved in the lecture. Of course, you don t need to know the proof.
Topology Summary Note to the reader. If a statement is marked with [Not proved in the lecture], then the statement was stated but not proved in the lecture. Of course, you don t need to know the proof.
Point-Set Topology 1. TOPOLOGICAL SPACES AND CONTINUOUS FUNCTIONS
 Point-Set Topology 1. TOPOLOGICAL SPACES AND CONTINUOUS FUNCTIONS Definition 1.1. Let X be a set and T a subset of the power set P(X) of X. Then T is a topology on X if and only if all of the following
Point-Set Topology 1. TOPOLOGICAL SPACES AND CONTINUOUS FUNCTIONS Definition 1.1. Let X be a set and T a subset of the power set P(X) of X. Then T is a topology on X if and only if all of the following
An interesting related problem is Buffon s Needle which was first proposed in the mid-1700 s.
 Using Monte Carlo to Estimate π using Buffon s Needle Problem An interesting related problem is Buffon s Needle which was first proposed in the mid-1700 s. Here s the problem (in a simplified form). Suppose
Using Monte Carlo to Estimate π using Buffon s Needle Problem An interesting related problem is Buffon s Needle which was first proposed in the mid-1700 s. Here s the problem (in a simplified form). Suppose