Model-based Visual Tracking:
|
|
|
- Ralf O’Brien’
- 5 years ago
- Views:
Transcription
1 Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois Knoll) Dr. Ing. Giorgio Panin
2 Technische Universität München Contents Object tracking: theory Building applications with OpenTL Dr. Ing. Giorgio Panin
3 Object tracking
4 Goal: Multi-Target / -Sensor / -Modal localization O 1 O 2 C 1 C i W


")

5 Model-based tracking Model Visual processing Localization (tracking) Video surveillance Control/navigation Face tracking...

6 Ground shape O 2 O 1 W
7 Pose parameters single-body transforms Base Euclidean Similarity Affine Homography 2D 3D Distances Angles Parallel lines Straight lines Invariant Angles Parallel lines Straight lines properties Parallel lines Straight lines Straight lines
8 Pose parameters articulated body T W,l0 W ρ T l 0,l 1 T l 1,l 2 x W = TW, l x 3 l3 x T l 2,l 3
9 Pose parameters deformable shapes x T W, 0) 0 ( x Link 0 y T W, p) 0 ( Link 0 y z W y z y T ( W, 0 0 ) x T W, p) 0 ( x W
 face tracking")

10 Active Shape Model (2D) face tracking Learning deformation modes from examples (PCA)



11 Object appearance Key-frames Texture map Active Appearance Model

12 Object dynamics 2nd order, Auto-Regressive model Damped-spring motion Process noise xt x = F1 ( xt 1 x) + F2 ( xt 2 x) + W0 w t x Motion type: specified by three main parameters Average state: x x Oscillation frequency: f Damping rate: β
 F 1 2 = 1")




13 Object dynamics - examples Brownian Motion ( f, β undefined) F 1 2 = 1 F = 0 W 0 = 0.1 White Noise Acceleration f = 0 β = F = 2 F = 1 W = 0.1 Periodic, undamped : f = 0.1 F 1 = 1.99 β = 0 F 2 = 1 W 0 = 0.1 Periodic, damped : f = 0.1 F 1 = 1.98 β = 0.05 F 2 = 0.99 W 0 = 0.88 Aperiodic (critically damped): f = 0 β = 0.5 F 1 = 1.9 F 2 = 0.9 W 0 = 2.12

 t t t W F")
14 Object dynamics multi-dim. = = I W I I I F = = I W I I F t=50 t=1000 Unconstrained Constrained ( ) t t t W F I F w s s s + + = 1 t=10000


15 Object model Shape Appearance Pose t t 2 0 t 1 Dynamics t 0 t 1 t 2 t 3 t 0 t i t k


16 Camera model Intrinsic parameters Pin-hole model Radial distortion x optical axis z c C x c c y c y f retinal plane
17 Camera model Extrinsic parameters c c 1 2 x w T c, w 1 w T c, w 2

")

18 Camera model Object-to-image projection (and back-projection) y 2 y 1 y x C T c, w Depth map W T w, o O







19 Visual modalities Shape moments Intensity gradients Contour lines Color statistics Texture template Optical flow Local keypoints (and others: Background subtraction / CCD / Harris keypoints / Histogram of oriented gradients / SIFT)




20 The tracking pipeline Data acquisition Preprocessing Matching Targets update Output Targets prediction Off-line features sampling Data fusion On-line features update Back-projection s t s t s t Prediction Rendered view Sampling model features New features Update model features s t Data acquisition Image features Pre-processing Re-projection Matching
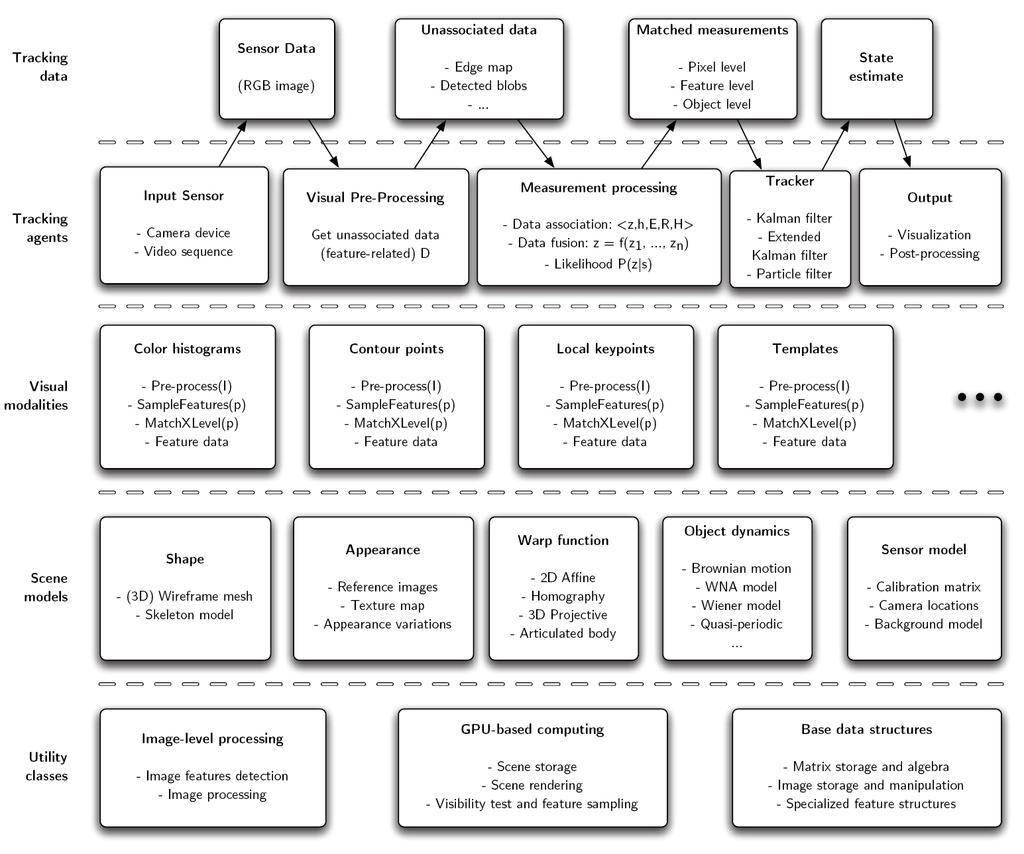
21 Abstraction: visual modality processing Rule: any modality class must implement Model free pre-processing Off-line and on-line features sampling and back-projection Multi-level data association (Pixel-, Feature-, State-space) Residuals, covariances and Jacobians computation Additional classes: Multi-modal, multi-sensor data fusion (cascade, parallel) Likelihood computation
22 Features sampling GPU assisted
 z")
 h = s - (predicted pose)")
23 Multi-level visual processing h(s) z e = z-h Pixel-level measurement h(s) z Feature-level measurement z = s* (LSE estimate) h = s - (predicted pose) Object-level measurement

")
24 Measurement: pixel- vs. feature-level Analogy with fluid mechanics Eulerian = pixel-level Lagrangian = feature-level v v Dense optical flow (HS) Sparse optical flow (LK)

25 Feature-level: re-projection vs. tracking Model feature re-projection Feature tracking (= flow )
26 Feature-level: validation gates (local search) x 2 x 1 x 3 Prior density (state-space) ( s, P Innovation densities (measurement space) ) ( yi, Si ) y, S 1 1 yi, S i y 3, S 2 2 y, S 3




27 Example: color histograms Model Color segmentation Pixel-level matching Feature-level matching = histogram distance Object-level matching = mean-shift optimization



28 Example: intensity edges Pixel-level Draw the silhouette Match silhouette to the Distance Transform sample contour points Feature-level Re-project and search in the image
29 Building in OpenTL Multi-camera, multi-level data fusion View 1 Color segmentation Pix Weighted Average Pix Blobs Feat s - Motion Pix Joint likelihood P( Z s ) = View 2 Edges Feat = P( Z s ) P( blobs Z obj MLE s ) Joint MLE Obj Keypoints Feat
30 Building processing trees in OpenTL Generalization of the tree Pix I 1 Mod 1 Static fusion Pix Mod 5 Feat s - Mod 2 Pix Dynamic fusion P( Z s ) Feat Mod 3 I 2 Static fusion Obj Mod 4 Feat
31 Data fusion multi-modal Background Color model Pixel-wise (AND) Benefits: Combine independent information sources Increase robustness (tracking fails if ALL modalities fail) Drawbacks: Need to define a proper fusion scheme, and parameters Higher computational effort slower frame rate
32 Data fusion multi-camera Complimentary setup Redundant setup


33 Data fusion multi-camera Complimentary setup: Indoor people tracking Redundant setup: 3D hand tracking
")
34 Multi-target occlusion handling Pixel-level Data (multi-class segmentation) Feature-level
35 Bayesian Tracking: prediction - correction Gaussian filters (Extended) Kalman filter Information filter Unscented Kalman/Information filter Monte-Carlo filters S-I-R particle filter MCMC particle filter
 True density ML / MAP Kalman Unscented Kalman Mix.")
36 Representing the target distribution Prior density P( st zt 1,..., z0) Posterior density P( st zt, zt 1,..., z0) True density ML / MAP Kalman Unscented Kalman Mix. Of Gaussians Kernel Particle Histogram (Eulerian)


37 Flow diagram of OpenTL-based applications Track Maintainance t I t Local processing Meas t Obj t Bayesian tracking Obj t Post-processing I t Track Initiation t Detection/ Recognition + Obj t 1 Obj t 1 Models Shape Appearance Degrees of freedom Dynamics Sensors Environment






38 Object detection (examples) General-purpose Monte-Carlo sampling in state-space People detection based on foreground blobs clustering Invariant keypoints matching (for textured objects) Marker detection based on intensity edges Hand detection based on color and edge lines Face detection based on a trained classifier (with Haar features)
39 Resume: model-based object tracking Objects Sensors Environment Models Features Sampling Occlusion Handling Pre-processing Data association Visual processing Detection/ Recognition Object Tracking Tracking Target Prediction Target Update Measurement Data fusion
40 Building applications with OpenTL
41
42 Features of OpenTL Modularized, object-oriented software architecture Common abstractions for layers Real-time performance Different Bayesian filters A large variety of visual modalities, with multiple processing levels Robust improvements (multi-hypotheses, data fusion, ) Generic sensor abstraction Support multi-camera, multi-target and multi-modal applications Support for GPU acceleration

 Particle Filter s Meas.")
43 Application: planar object tracking Single-target, single-camera, color-based s Color histograms Z feat Likelihood P( Z feat s ) Particle Filter s Meas. processing Tracking Modeling
44

45
46 Application: planar object tracking Fusion color+background (pixel-level), and blob detection Color statistics Background subtraction Z pix s - Z pix Image fusion Z pix Blobs Z feat Likelihood P( Z feat s ) Particle Filter s
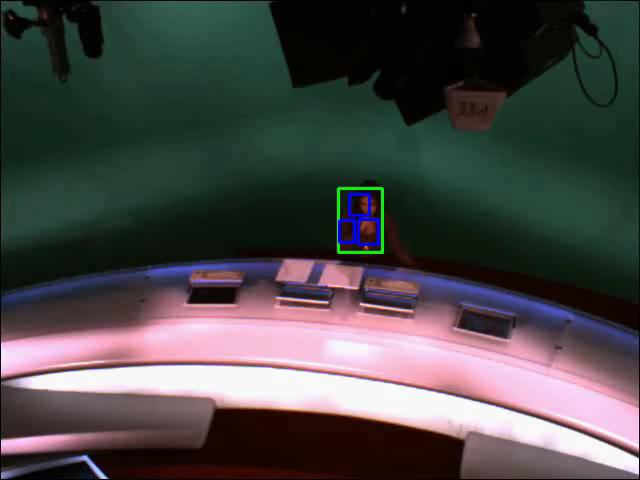
47 People tracking with distributed cameras Distributed, multi-camera setup CoTeSys ITrackU People detection and tracking in real-time 3D localization Goal: Human-Robot Interaction (coffee-break scenario)

48 Hierarchical grid-based localization


49 Stereo tracking of a quadcopter
50
 2D s 2D")
 3D s 3D (0) s 2 D s 3D 2D 3D")

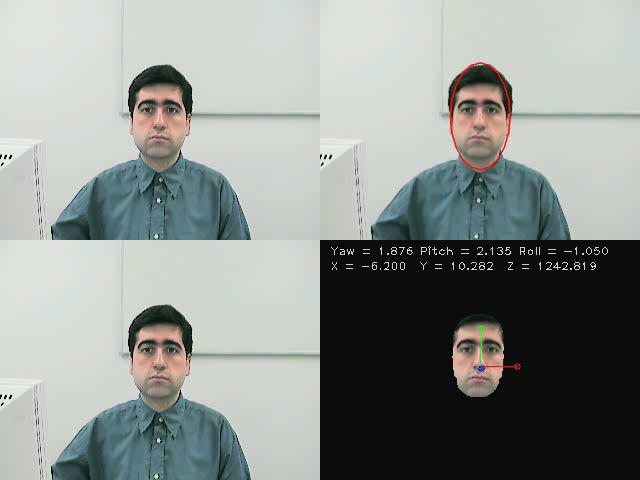
51 Application: face tracking Cascade of two pipelines, with 3D pose upgrade s ( i) 2D s 2D CCD Z feat Object-level upgrade Zobj Kalman Filter s 2D s ( i) 3D s 3D (0) s 2 D s 3D 2D 3D pose upgrade Template matching Z feat Object-level upgrade Zobj Kalman Filter s 3D 2D tracking 3D model 3D tracking
52

53 Application: 3D hand tracking
54

55 Technische Universität München Our Tracking Projects Pedestrian Tracking Vivid cell tracking Human Robot Interaction VR TV Studio Automation Quadcopter tracking ITrackU (CCRL) Dr. Ing. Giorgio Panin
")

56 Technische Universität München Our Team graduate and post-doc coworkers student coworkers ITrackU (Panin) manifold research projects funded by DFG, EU, industry partners focus on robust, real-world applications Dr. Ing. Giorgio Panin
Computer Vision Object and People Tracking
 Computer Vision Object and People Prof. Didier Stricker Doz. Dr. Gabriele Bleser Kaiserlautern University http://www.ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Computer Vision Object and People Prof. Didier Stricker Doz. Dr. Gabriele Bleser Kaiserlautern University http://www.ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Visual Motion Analysis and Tracking Part II
 Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Particle Filtering. CS6240 Multimedia Analysis. Leow Wee Kheng. Department of Computer Science School of Computing National University of Singapore
 Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
Tracking Algorithms. Lecture16: Visual Tracking I. Probabilistic Tracking. Joint Probability and Graphical Model. Deterministic methods
 Tracking Algorithms CSED441:Introduction to Computer Vision (2017F) Lecture16: Visual Tracking I Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Deterministic methods Given input video and current state,
Tracking Algorithms CSED441:Introduction to Computer Vision (2017F) Lecture16: Visual Tracking I Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Deterministic methods Given input video and current state,
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Introduction to behavior-recognition and object tracking
 Introduction to behavior-recognition and object tracking Xuan Mo ipal Group Meeting April 22, 2011 Outline Motivation of Behavior-recognition Four general groups of behaviors Core technologies Future direction
Introduction to behavior-recognition and object tracking Xuan Mo ipal Group Meeting April 22, 2011 Outline Motivation of Behavior-recognition Four general groups of behaviors Core technologies Future direction
ROBUST OBJECT TRACKING BY SIMULTANEOUS GENERATION OF AN OBJECT MODEL
 ROBUST OBJECT TRACKING BY SIMULTANEOUS GENERATION OF AN OBJECT MODEL Maria Sagrebin, Daniel Caparròs Lorca, Daniel Stroh, Josef Pauli Fakultät für Ingenieurwissenschaften Abteilung für Informatik und Angewandte
ROBUST OBJECT TRACKING BY SIMULTANEOUS GENERATION OF AN OBJECT MODEL Maria Sagrebin, Daniel Caparròs Lorca, Daniel Stroh, Josef Pauli Fakultät für Ingenieurwissenschaften Abteilung für Informatik und Angewandte
Automatic Tracking of Moving Objects in Video for Surveillance Applications
 Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Final Exam Study Guide CSE/EE 486 Fall 2007
 Final Exam Study Guide CSE/EE 486 Fall 2007 Lecture 2 Intensity Sufaces and Gradients Image visualized as surface. Terrain concepts. Gradient of functions in 1D and 2D Numerical derivatives. Taylor series.
Final Exam Study Guide CSE/EE 486 Fall 2007 Lecture 2 Intensity Sufaces and Gradients Image visualized as surface. Terrain concepts. Gradient of functions in 1D and 2D Numerical derivatives. Taylor series.
Robust contour-based object tracking integrating color and edge likelihoods
 Robust contour-based object tracking integrating color and edge likelihoods Giorgio Panin, Erwin Roth, Alois Knoll Technische Universität München, Fakultät für Informatik Boltzmannstrasse 3, 85748 Garching
Robust contour-based object tracking integrating color and edge likelihoods Giorgio Panin, Erwin Roth, Alois Knoll Technische Universität München, Fakultät für Informatik Boltzmannstrasse 3, 85748 Garching
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Part I: HumanEva-I dataset and evaluation metrics
 Part I: HumanEva-I dataset and evaluation metrics Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ http://vision.cs.brown.edu/humaneva/ Motivation
Part I: HumanEva-I dataset and evaluation metrics Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ http://vision.cs.brown.edu/humaneva/ Motivation
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion
 Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion Zhe Lin, Larry S. Davis, David Doermann, and Daniel DeMenthon Institute for Advanced Computer Studies University of
Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion Zhe Lin, Larry S. Davis, David Doermann, and Daniel DeMenthon Institute for Advanced Computer Studies University of
Observing people with multiple cameras
 First Short Spring School on Surveillance (S 4 ) May 17-19, 2011 Modena,Italy Course Material Observing people with multiple cameras Andrea Cavallaro Queen Mary University, London (UK) Observing people
First Short Spring School on Surveillance (S 4 ) May 17-19, 2011 Modena,Italy Course Material Observing people with multiple cameras Andrea Cavallaro Queen Mary University, London (UK) Observing people
Raghuraman Gopalan Center for Automation Research University of Maryland, College Park
 2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts
2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Announcements. Recognition I. Gradient Space (p,q) What is the reflectance map?
 What is the reflectance map?") Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
3D Human Motion Analysis and Manifolds
 D E P A R T M E N T O F C O M P U T E R S C I E N C E U N I V E R S I T Y O F C O P E N H A G E N 3D Human Motion Analysis and Manifolds Kim Steenstrup Pedersen DIKU Image group and E-Science center Motivation
D E P A R T M E N T O F C O M P U T E R S C I E N C E U N I V E R S I T Y O F C O P E N H A G E N 3D Human Motion Analysis and Manifolds Kim Steenstrup Pedersen DIKU Image group and E-Science center Motivation
Eppur si muove ( And yet it moves )
") Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
Announcements. Computer Vision I. Motion Field Equation. Revisiting the small motion assumption. Visual Tracking. CSE252A Lecture 19.
 Visual Tracking CSE252A Lecture 19 Hw 4 assigned Announcements No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Motion Field Equation Measurements I x = I x, T: Components
Visual Tracking CSE252A Lecture 19 Hw 4 assigned Announcements No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Motion Field Equation Measurements I x = I x, T: Components
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Outline. Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion. Media IC & System Lab Po-Chen Wu 2
 Outline Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion Media IC & System Lab Po-Chen Wu 2 Outline Introduction System Overview Camera Calibration
Outline Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion Media IC & System Lab Po-Chen Wu 2 Outline Introduction System Overview Camera Calibration
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features
 Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
On Board 6D Visual Sensors for Intersection Driving Assistance Systems
 On Board 6D Visual Sensors for Intersection Driving Assistance Systems S. Nedevschi, T. Marita, R. Danescu, F. Oniga, S. Bota, I. Haller, C. Pantilie, M. Drulea, C. Golban Sergiu.Nedevschi@cs.utcluj.ro
On Board 6D Visual Sensors for Intersection Driving Assistance Systems S. Nedevschi, T. Marita, R. Danescu, F. Oniga, S. Bota, I. Haller, C. Pantilie, M. Drulea, C. Golban Sergiu.Nedevschi@cs.utcluj.ro
Towards a visual perception system for LNG pipe inspection
 Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Multi-Camera Calibration, Object Tracking and Query Generation
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Multi-Camera Calibration, Object Tracking and Query Generation Porikli, F.; Divakaran, A. TR2003-100 August 2003 Abstract An automatic object
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Multi-Camera Calibration, Object Tracking and Query Generation Porikli, F.; Divakaran, A. TR2003-100 August 2003 Abstract An automatic object
Practical Camera Auto-Calibration Based on Object Appearance and Motion for Traffic Scene Visual Surveillance
 Practical Camera Auto-Calibration Based on Object Appearance and Motion for Traffic Scene Visual Surveillance Zhaoxiang Zhang, Min Li, Kaiqi Huang and Tieniu Tan National Laboratory of Pattern Recognition,
Practical Camera Auto-Calibration Based on Object Appearance and Motion for Traffic Scene Visual Surveillance Zhaoxiang Zhang, Min Li, Kaiqi Huang and Tieniu Tan National Laboratory of Pattern Recognition,
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Volume 3, Issue 11, November 2013 International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 3, Issue 11, November 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Comparison
Volume 3, Issue 11, November 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Comparison
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Research on Robust Local Feature Extraction Method for Human Detection
 Waseda University Doctoral Dissertation Research on Robust Local Feature Extraction Method for Human Detection TANG, Shaopeng Graduate School of Information, Production and Systems Waseda University Feb.
Waseda University Doctoral Dissertation Research on Robust Local Feature Extraction Method for Human Detection TANG, Shaopeng Graduate School of Information, Production and Systems Waseda University Feb.
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Evaluation of Moving Object Tracking Techniques for Video Surveillance Applications
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
Combining Multiple Tracking Modalities for Vehicle Tracking in Traffic Intersections
 Combining Multiple Tracking Modalities for Vehicle Tracking in Traffic Intersections Harini Veeraraghavan Nikolaos Papanikolopoulos Artificial Intelligence, Vision and Robotics Lab Department of Computer
Combining Multiple Tracking Modalities for Vehicle Tracking in Traffic Intersections Harini Veeraraghavan Nikolaos Papanikolopoulos Artificial Intelligence, Vision and Robotics Lab Department of Computer
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Video Tracking Algorithm for Unmanned Aerial Vehicle Surveillance
 Video Tracking Algorithm for Unmanned Aerial Vehicle Surveillance OLOV SAMUELSSON Master s Degree Project Stockholm, Sweden June 2012 XR-EE-SB 2012:010 Abstract On behalf of Avia Satcom Co., Ltd. we have
Video Tracking Algorithm for Unmanned Aerial Vehicle Surveillance OLOV SAMUELSSON Master s Degree Project Stockholm, Sweden June 2012 XR-EE-SB 2012:010 Abstract On behalf of Avia Satcom Co., Ltd. we have
State-space models for 3D visual tracking
 SA-1 State-space models for 3D visual tracking Doz. G. Bleser Prof. Stricker Computer Vision: Object and People Tracking Example applications Head tracking, e.g. for mobile seating buck Object tracking,
SA-1 State-space models for 3D visual tracking Doz. G. Bleser Prof. Stricker Computer Vision: Object and People Tracking Example applications Head tracking, e.g. for mobile seating buck Object tracking,
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Calibration of a Different Field-of-view Stereo Camera System using an Embedded Checkerboard Pattern
 Calibration of a Different Field-of-view Stereo Camera System using an Embedded Checkerboard Pattern Pathum Rathnayaka, Seung-Hae Baek and Soon-Yong Park School of Computer Science and Engineering, Kyungpook
Calibration of a Different Field-of-view Stereo Camera System using an Embedded Checkerboard Pattern Pathum Rathnayaka, Seung-Hae Baek and Soon-Yong Park School of Computer Science and Engineering, Kyungpook
HUMAN COMPUTER INTERFACE BASED ON HAND TRACKING
 Proceedings of MUSME 2011, the International Symposium on Multibody Systems and Mechatronics Valencia, Spain, 25-28 October 2011 HUMAN COMPUTER INTERFACE BASED ON HAND TRACKING Pedro Achanccaray, Cristian
Proceedings of MUSME 2011, the International Symposium on Multibody Systems and Mechatronics Valencia, Spain, 25-28 October 2011 HUMAN COMPUTER INTERFACE BASED ON HAND TRACKING Pedro Achanccaray, Cristian
WP1: Video Data Analysis
 Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 11 Part-2 Segmentation, Camera Calibration and Feature Alignment March 28, 2014 Sam Siewert Outline of Week 11 Exam #1 Results Overview and Solutions Wrap up of
Computer and Machine Vision Lecture Week 11 Part-2 Segmentation, Camera Calibration and Feature Alignment March 28, 2014 Sam Siewert Outline of Week 11 Exam #1 Results Overview and Solutions Wrap up of
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Learning 6D Object Pose Estimation and Tracking
 Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Project Ideas Dates 11/13 Proposals due - 1 page write-up - summary and goals (problem/approach) - what are the key references - where will you get data
Introduction to Computer Vision Michael J. Black Project Ideas Dates 11/13 Proposals due - 1 page write-up - summary and goals (problem/approach) - what are the key references - where will you get data
Real-Time Human Detection using Relational Depth Similarity Features
 Real-Time Human Detection using Relational Depth Similarity Features Sho Ikemura, Hironobu Fujiyoshi Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai, Aichi, 487-8501 Japan. si@vision.cs.chubu.ac.jp,
Real-Time Human Detection using Relational Depth Similarity Features Sho Ikemura, Hironobu Fujiyoshi Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai, Aichi, 487-8501 Japan. si@vision.cs.chubu.ac.jp,
Active Monte Carlo Recognition
 Active Monte Carlo Recognition Felix v. Hundelshausen 1 and Manuela Veloso 2 1 Computer Science Department, Freie Universität Berlin, 14195 Berlin, Germany hundelsh@googlemail.com 2 Computer Science Department,
Active Monte Carlo Recognition Felix v. Hundelshausen 1 and Manuela Veloso 2 1 Computer Science Department, Freie Universität Berlin, 14195 Berlin, Germany hundelsh@googlemail.com 2 Computer Science Department,
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Scale Invariant Segment Detection and Tracking
 Scale Invariant Segment Detection and Tracking Amaury Nègre 1, James L. Crowley 1, and Christian Laugier 1 INRIA, Grenoble, France firstname.lastname@inrialpes.fr Abstract. This paper presents a new feature
Scale Invariant Segment Detection and Tracking Amaury Nègre 1, James L. Crowley 1, and Christian Laugier 1 INRIA, Grenoble, France firstname.lastname@inrialpes.fr Abstract. This paper presents a new feature
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Computer Vision. Exercise 3 Panorama Stitching 09/12/2013. Compute Vision : Exercise 3 Panorama Stitching
 Computer Vision Exercise 3 Panorama Stitching 09/12/2013 Compute Vision : Exercise 3 Panorama Stitching The task Compute Vision : Exercise 3 Panorama Stitching 09/12/2013 2 Pipeline Compute Vision : Exercise
Computer Vision Exercise 3 Panorama Stitching 09/12/2013 Compute Vision : Exercise 3 Panorama Stitching The task Compute Vision : Exercise 3 Panorama Stitching 09/12/2013 2 Pipeline Compute Vision : Exercise
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging
 Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging Florin C. Ghesu 1, Thomas Köhler 1,2, Sven Haase 1, Joachim Hornegger 1,2 04.09.2014 1 Pattern
Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging Florin C. Ghesu 1, Thomas Köhler 1,2, Sven Haase 1, Joachim Hornegger 1,2 04.09.2014 1 Pattern
A Survey of Vision-Based Markerless Hand Tracking Approaches
 A Survey of Vision-Based Markerless Hand Tracking Approaches Daniel Mohr, Gabriel Zachmann University of Bremen, Germany Abstract Vision-based markerless hand tracking has many applications such as virtual
A Survey of Vision-Based Markerless Hand Tracking Approaches Daniel Mohr, Gabriel Zachmann University of Bremen, Germany Abstract Vision-based markerless hand tracking has many applications such as virtual
A Fast Moving Object Detection Technique In Video Surveillance System
 A Fast Moving Object Detection Technique In Video Surveillance System Paresh M. Tank, Darshak G. Thakore, Computer Engineering Department, BVM Engineering College, VV Nagar-388120, India. Abstract Nowadays
A Fast Moving Object Detection Technique In Video Surveillance System Paresh M. Tank, Darshak G. Thakore, Computer Engineering Department, BVM Engineering College, VV Nagar-388120, India. Abstract Nowadays
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Visual Tracking. Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania.
 Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania 1 What is visual tracking? estimation of the target location over time 2 applications Six main areas:
Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania 1 What is visual tracking? estimation of the target location over time 2 applications Six main areas:
An Adaptive Fusion Architecture for Target Tracking
 An Adaptive Fusion Architecture for Target Tracking Gareth Loy, Luke Fletcher, Nicholas Apostoloff and Alexander Zelinsky Department of Systems Engineering Research School of Information Sciences and Engineering
An Adaptive Fusion Architecture for Target Tracking Gareth Loy, Luke Fletcher, Nicholas Apostoloff and Alexander Zelinsky Department of Systems Engineering Research School of Information Sciences and Engineering
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences
 Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Parallel Tracking. Henry Spang Ethan Peters
 Parallel Tracking Henry Spang Ethan Peters Contents Introduction HAAR Cascades Viola Jones Descriptors FREAK Descriptor Parallel Tracking GPU Detection Conclusions Questions Introduction Tracking is a
Parallel Tracking Henry Spang Ethan Peters Contents Introduction HAAR Cascades Viola Jones Descriptors FREAK Descriptor Parallel Tracking GPU Detection Conclusions Questions Introduction Tracking is a
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
A Survey on Object Detection and Tracking Methods
 A Survey on Object Detection and Tracking Methods Himani S. Parekh 1, Darshak G. Thakore 2, Udesang K. Jaliya 3 P.G.Student, Department of Computer Engineering, B.V.M. Engineering College, V. V. Nagar,
A Survey on Object Detection and Tracking Methods Himani S. Parekh 1, Darshak G. Thakore 2, Udesang K. Jaliya 3 P.G.Student, Department of Computer Engineering, B.V.M. Engineering College, V. V. Nagar,
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Image segmentation. Václav Hlaváč. Czech Technical University in Prague
 Image segmentation Václav Hlaváč Czech Technical University in Prague Center for Machine Perception (bridging groups of the) Czech Institute of Informatics, Robotics and Cybernetics and Faculty of Electrical
Image segmentation Václav Hlaváč Czech Technical University in Prague Center for Machine Perception (bridging groups of the) Czech Institute of Informatics, Robotics and Cybernetics and Faculty of Electrical
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.