GEOMETRICAL CONSTRAINTS IN THE LEVEL SET METHOD FOR SHAPE AND TOPOLOGY OPTIMIZATION
|
|
|
- Russell Stevenson
- 6 years ago
- Views:
Transcription
1 1 GEOMETRICAL CONSTRAINTS IN THE LEVEL SET METHOD FOR SHAPE AND TOPOLOGY OPTIMIZATION Grégoire ALLAIRE CMAP, Ecole Polytechnique Results obtained in collaboration with F. Jouve (LJLL, Paris 7), G. Michailidis (formerly Renault and CMAP). Oxbridge PDE conference, March, 23-24, 2015.

2 2 CONTENTS Ecole Polytechnique, RODIN project UPMC, INRIA, Renault, EADS, ESI group, etc. 1. Introduction. 2. Shape and topology optimization by the level set method. 3. Geometrical constraints. 4. Numerical results. 5. Molding constraints.
3 3 -I- INTRODUCTION Shape optimization : minimize an objective function over a set U ad of admissibles shapes Ω (including possible constraints) inf J(Ω) Ω U ad The objective function is evaluated through a partial differential equation (state equation) J(Ω) = j(u Ω )dx where u Ω is the solution of Ω PDE(u Ω ) = 0 in Ω Topology optimization : the optimal topology is unknown.
4 4 The model of linear elasticity A shape is an open set Ω R d with boundary Ω = Γ Γ N Γ D. For a given applied load g : Γ N R d, the displacement u : Ω R d is the solution of div(ae(u)) = 0 in Ω u = 0 on Γ D ( ) Ae(u) n = g on ΓN ( Ae(u) ) n = 0 on Γ with the strain tensor e(u) = 1 2 ( u+ t u), the stress tensor σ = Ae(u), and A an homogeneous isotropic elasticity tensor. Typical objective function: the compliance J(Ω) = g udx, Γ N
5 5 Example: the cantilever Γ D Γ Γ N Γ D
6 6 Admissible shapes The shape optimization problem is inf J(Ω), Ω U ad where the set of admissible shapes is typically { U ad = Ω D open set such that Γ D ΓN Ω and Ω } dx = V 0, where D R d is a given working domain and V 0 is a prescribed volume. The boundary subsets Γ D and Γ N are fixed. Only Γ is optimized (free boundary). Existence of optimal shapes is a delicate issue (typically, one needs further constraints in U ad ). A nice numerical method is the level set algorithm since it allows for topology changes.


7 7 Industrial applications Tremendous progresses were achieved on academic research about shape and topology optimization. There are several commercial softwares used by industry. But manufacturability of the optimal shapes is not always guaranteed.
8 8 Goal of the present work We want to add geometrical constraints (for manufacturability), i.e., constraints on Ω, not on the state u Ω. The level set framework is well suited for this because it relies on the distance function to the boundary. Issues to be addressed concerning geometrical constraints: modelling, shape differentiation, numerical implementation. Before that, let s review the state of the art about the level set method for shape and topology optimization.
9 9 -II- LEVEL SET METHOD A new numerical implementation of an old idea... Framework of Hadamard s method of shape variations. Main tool: the level set method of Osher and Sethian (JCP 1988). Shape capturing algorithm. Fixed mesh: low computational cost. Early references: Sethian and Wiegmann (JCP 2000), Osher and Santosa (JCP 2001), Allaire, Jouve and Toader (CRAS 2002, JCP 2004, CMAME 2005), Wang, Wang and Guo (CMAME 2003).
10 10 Shape tracking Shape capturing
11 11 FRONT PROPAGATION BY LEVEL SET Shape capturing method on a fixed mesh of the working domain D. A shape Ω is parametrized by a level set function ψ(x) = 0 x Ω D ψ(x) < 0 x Ω ψ(x) > 0 x (D\Ω) Assume that the shape Ω(t) evolves in time t with a normal velocity V(t,x). Then its motion is governed by the following Hamilton Jacobi equation ψ t +V xψ = 0 in D.
12 12 Example of a level set function
13 13 Advection velocity = shape gradient The velocity V is deduced from the shape gradient of the objective function. To compute this shape gradient we recall the well-known Hadamard s method. Let Ω 0 be a reference domain. Shapes are parametrized by a vector field θ Ω = (Id+θ)Ω 0 with θ C 1 (R d ;R d ). Ω 0 (Ι d +θ)ω0 x x+ θ(x)
14 14 Shape derivative Definition: the shape derivative of J(Ω) at Ω 0 is the Fréchet differential of θ J ( (Id+θ)Ω 0 ) at 0. Hadamard structure theorem: the shape derivative of J(Ω) can always be written (in a distributional sense) J (Ω 0 )(θ) = θ(x) n(x)j(x)ds Ω 0 where j(x) is an integrand depending on the state u and an adjoint p. We choose the velocity V = θ n such that J (Ω 0 )(θ) 0. Simplest choice: V = θ n = j but other ones are possible (including regularization).
15 15 SHAPE DERIVATIVE OF THE COMPLIANCE J(Ω) = Γ N g u Ω ds = where u Ω is the state variable in Ω. J (Ω)(θ) = Remarks: Γ Ω Ae(u Ω ) e(u Ω )dx, Ae(u Ω ) e(u Ω )θ nds, 1. self-adjoint problem (no adjoint state is required), 2. taking into account the volume constraint add a fixed Lagrange multiplier λ Ae(u Ω ) e(u Ω ).
16 16 NUMERICAL ALGORITHM 1. Initialization of the level set function ψ 0 (including holes). 2. Iteration until convergence for k 1: (a) Compute the elastic displacement u k for the shape ψ k. Deduce the shape gradient = normal velocity = V k (b) Advect the shape with V k (solving the Hamilton Jacobi equation) to obtain a new shape ψ k+1. For numerical examples, see the web page: optopo/level en.html

17 17 Examples of results with complex topologies
18 18 -III- GEOMETRICAL CONSTRAINTS We focus on thickness control because of manufacturability, uncertainty in the microscale (MEMS design), robust design (fatigue, buckling, etc.). Existing works: Several approaches in the framework of the SIMP method to ensure minimum length scale (Sigmund, Poulsen, Guest, etc.). In the level-set framework: Chen, Wang and Liu implictly control the feature size by adding a line energy term to the objective function ; Alexandrov and Santosa kept a fixed topology by using offset sets. Many works in image processing.

 defined by : d(x, Ω) ifx Ω d Ω (x) = 0 ifx Ω d(x, Ω) ifx")
19 19 Signed-distance function Definition. Let Ω R d be a bounded domain. The signed distance function to Ω is the function R d x d Ω (x) defined by : d(x, Ω) ifx Ω d Ω (x) = 0 ifx Ω d(x, Ω) ifx R d \Ω where d(, Ω) is the usual Euclidean distance.
20 20 Constraint formulations Maximum thickness. Let d max be the maximum allowed thickness. The constraint reads: d Ω (x) d max /2 x Ω Minimum thickness Let d min be the minimum allowed thickness. The constraint reads: d Ω (x d off n(x)) 0 x Ω, d off [0,d min ] Remark: similar constraints for the thickness of holes.
 such that")
21 21 Offset sets For minimum thicknes we rely on the classical notion of offset sets of the boundary of a shape, defined by {x d off n(x) such that x Ω}
 value of d off does not work!")
22 22 Caution with minimum thickness! Writing a constraint for a single (large) value of d off does not work! This is the reason why all values of d off between 0 and d min are taken into account.
23 23 Quadratic penalty method We reformulate the pointwise constraint into a global one denoted by P (Ω). Maximum thickness P (Ω) = Ω [ (d Ω (x)+d max /2) ] 2 dx Minimum thickness P (Ω) = Ω dmin 0 [ (d Ω (x d off n(x))) +] 2 dxddoff where f + = max(f,0) and f = min(f,0).
24 24 Property of the signed distance function The signed distance function has a tent-like shape.
25 25 Rays and skeleton of Ω The skeleton (or ridge) is made of the points x Ω where there are multiple minimizers for d(x, Ω) = min y Ω x y. Equivalently, the skeleton is the set of points where n = d Ω is discontinuous. Equivalently (Huygens principle) the skeleton is the geometric location of centers of maximal disks.
26 26 Rays and skeleton (Ctd.) The ray issued from x Ω is the integral curve of n = d Ω. The rays are straight lines because ẋ(t) = n(x(t)) implies t = d Ω (x(t)).
27 27 Shape derivative of the signed-distance function Lemma. Fix x Ω\Skeleton. Define p Ω (x) the unique point on Ω such that d(x, Ω) = x p Ω (x). Then, the pointwise shape derivative is ( ) d Ω(θ)(x) = θ n (p Ω (x)). Remarks. The computation of the shape derivative of the signed-distance function is classical (e.g. Delfour and Zolesio). The shape derivative d Ω (θ) remains constant along the normal and rays (but is discontinuous on the skeleton).
28 28 Lemma. For a function j C 1 (R) define J(Ω) = j(d Ω (x))dx. Then J is shape differentiable and J (Ω)(θ) = j (d Ω (x)) D D ( ) θ n (p Ω (x)) dx or equivalently for a C 2 domain Ω (by using a coarea formula) ( ( ) ) d 1 J (Ω)(θ) = θ n (y) j (d Ω (x)) (1+d Ω (x)κ i (y)) ds dy Ω ray(y) with κ i the principal curvatures of Ω, ray(y) = {x = y sn(y)} and s the curvilinear abcissa. i=1 In numerical practice we approximate the Jacobian by 1.
29 29 -IV- NUMERICAL RESULTS All the geometrical computations (skeleton, offset, projection, etc.) are standard and very cheap (compared to the elasticity analysis). All our numerical examples are for compliance minimization (except otherwise mentioned). Optimization: we use an augmented Lagrangian method. At convergence, the geometrical constraints are exactly satisfied. All results have bee obtained with our software developped in the finite element code SYSTUS of ESI group.


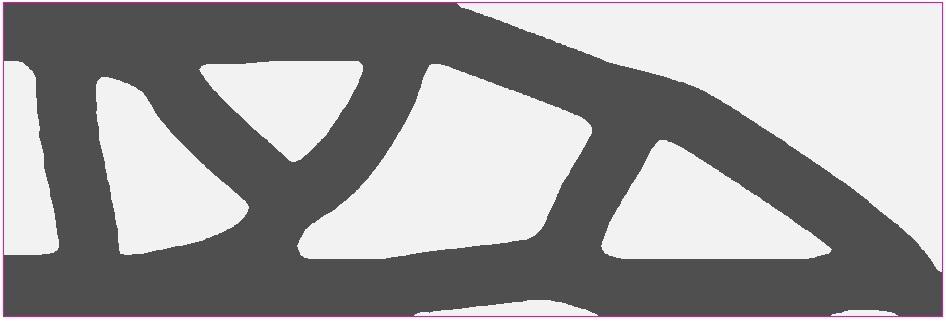
30 30 Maximum thickness (MBB, solution without constraint)


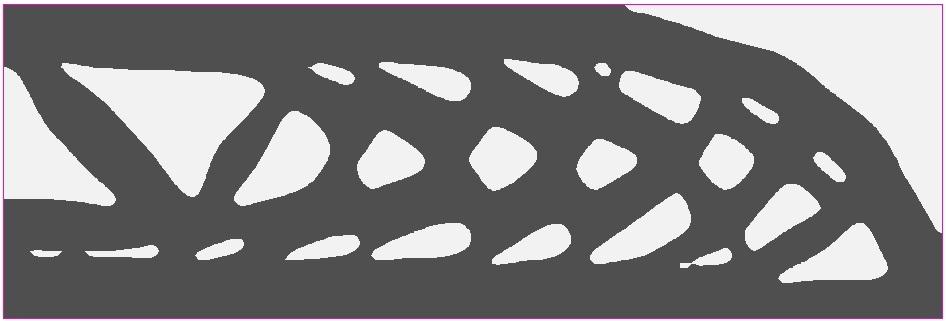
31 31 Maximum thickness (solution with increasing constraint)


32 32 Maximum thickness (3d MBB beam)

")
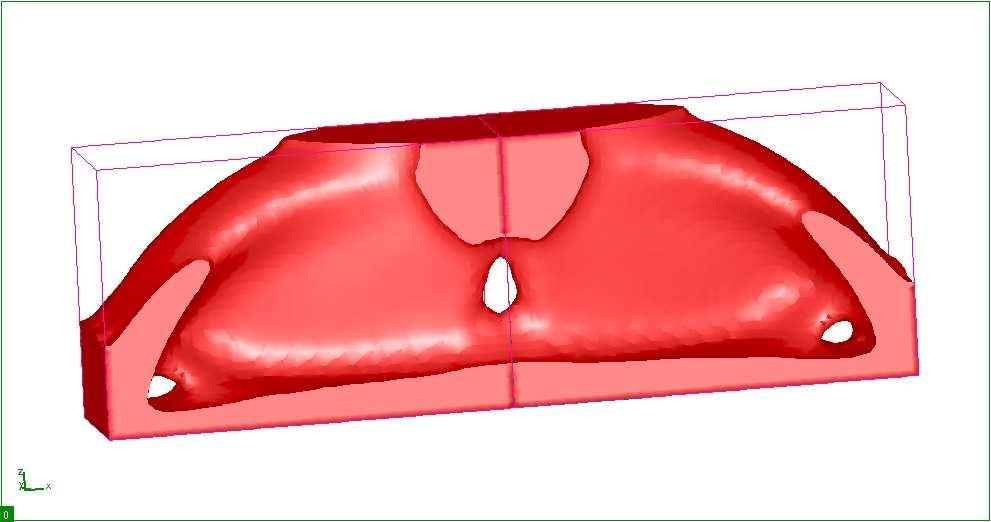
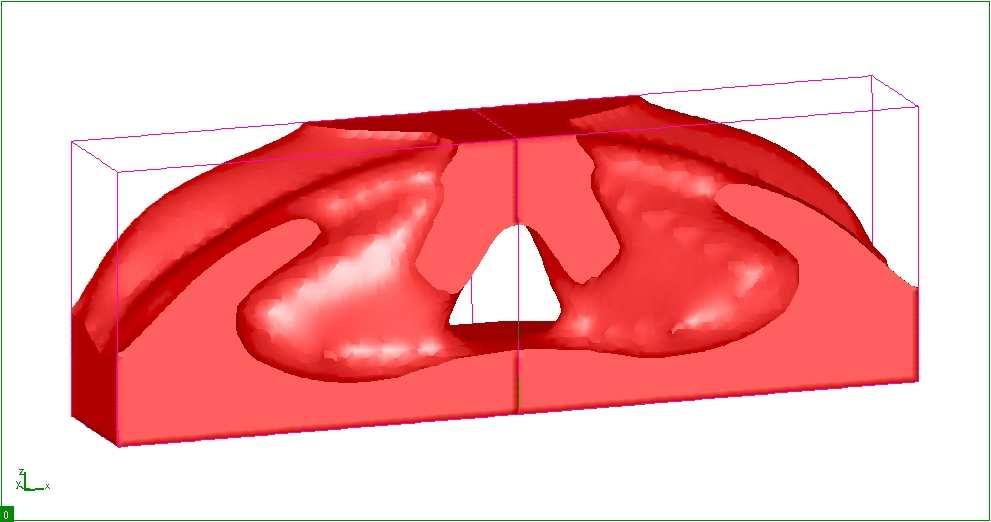
33 33 Maximum thickness (3d Box)



34 34 Minimum thickness (MBB beam)


35 35 Minimum thickness (force inverter)

36 36 Minimum thickness (3d)

 0, x Γ")
37 37 -V- MOLDING CONSTRAINTS Parting surfaces Γ i and draw directions d i : castable (left), not castable (right). Moldability condition: d i n(x) 0, x Γ i.
38 38 Sufficient conditions for molding Starting from a castable initial design: Xia et al. (SMO 2010) proposed to project the velocity θ i (x) = λ(x)d i, x Γ i. Starting from a non-castable initial design: we suggest the constraint d Ω (x+ξd i ) 0 x Γ i, ξ [0,dist(x, D)].
39 39 No constraint (top), vertical draw direction (bottom). Parting surface fixed at bottom (left) and free (right).
, out of plane draw direction")
40 40 Industrial test case (courtesy of Renault): no molding constraint (left), out of plane draw direction (right).
41 41 Conclusion Work still going on. Other penalizations of the geometrical constraints. Should we apply the constraints from the start or near the end? What if we want to stay feasible at each iteration? Handling several constraints simultaneously. Better optimization algorithm: sequential linear programming with trust region.
Structural optimization using sensitivity analysis and a level-set method, in Scilab and Matlab
 Structural optimization using sensitivity analysis and a level-set method, in Scilab and Matlab Anton Mario Bongio Karrman, Caltech Grégoire Allaire, Ecole Polytechnique October 13, 2009 Abstract A common
Structural optimization using sensitivity analysis and a level-set method, in Scilab and Matlab Anton Mario Bongio Karrman, Caltech Grégoire Allaire, Ecole Polytechnique October 13, 2009 Abstract A common
A MESH EVOLUTION ALGORITHM BASED ON THE LEVEL SET METHOD FOR GEOMETRY AND TOPOLOGY OPTIMIZATION
 A MESH EVOLUTION ALGORITHM BASED ON THE LEVEL SET METHOD FOR GEOMETRY AND TOPOLOGY OPTIMIZATION G. ALLAIRE 1 C. DAPOGNY 2,3, P. FREY 2 1 Centre de Mathématiques Appliquées (UMR 7641), École Polytechnique
A MESH EVOLUTION ALGORITHM BASED ON THE LEVEL SET METHOD FOR GEOMETRY AND TOPOLOGY OPTIMIZATION G. ALLAIRE 1 C. DAPOGNY 2,3, P. FREY 2 1 Centre de Mathématiques Appliquées (UMR 7641), École Polytechnique
COUPLING THE LEVEL SET METHOD AND THE TOPOLOGICAL GRADIENT IN STRUCTURAL OPTIMIZATION
 COUPLING THE LEVEL SET METHOD AND THE TOPOLOGICAL GRADIENT IN STRUCTURAL OPTIMIZATION Grégoire ALLAIRE Centre de Mathématiques Appliquées (UMR 7641) Ecole Polytechnique, 91128 Palaiseau, France gregoire.allaire@polytechnique.fr
COUPLING THE LEVEL SET METHOD AND THE TOPOLOGICAL GRADIENT IN STRUCTURAL OPTIMIZATION Grégoire ALLAIRE Centre de Mathématiques Appliquées (UMR 7641) Ecole Polytechnique, 91128 Palaiseau, France gregoire.allaire@polytechnique.fr
Level-set and ALE Based Topology Optimization Using Nonlinear Programming
 10 th World Congress on Structural and Multidisciplinary Optimization May 19-24, 2013, Orlando, Florida, USA Level-set and ALE Based Topology Optimization Using Nonlinear Programming Shintaro Yamasaki
10 th World Congress on Structural and Multidisciplinary Optimization May 19-24, 2013, Orlando, Florida, USA Level-set and ALE Based Topology Optimization Using Nonlinear Programming Shintaro Yamasaki
Theoretical Background for OpenLSTO v0.1: Open Source Level Set Topology Optimization. M2DO Lab 1,2. 1 Cardiff University
 Theoretical Background for OpenLSTO v0.1: Open Source Level Set Topology Optimization M2DO Lab 1,2 1 Cardiff University 2 University of California, San Diego November 2017 A brief description of theory
Theoretical Background for OpenLSTO v0.1: Open Source Level Set Topology Optimization M2DO Lab 1,2 1 Cardiff University 2 University of California, San Diego November 2017 A brief description of theory
Structural Optimization with FreeFem++
 StrucOpt manuscript No. (will be inserted by the editor) Structural Optimization with FreeFem++ G. Allaire, O. Pantz Abstract The aim of this paper is to show that relatively small, simple and efficient
StrucOpt manuscript No. (will be inserted by the editor) Structural Optimization with FreeFem++ G. Allaire, O. Pantz Abstract The aim of this paper is to show that relatively small, simple and efficient
The Level Set Method applied to Structural Topology Optimization
 The Level Set Method applied to Structural Topology Optimization Dr Peter Dunning 22-Jan-2013 Structural Optimization Sizing Optimization Shape Optimization Increasing: No. design variables Opportunity
The Level Set Method applied to Structural Topology Optimization Dr Peter Dunning 22-Jan-2013 Structural Optimization Sizing Optimization Shape Optimization Increasing: No. design variables Opportunity
An explicit feature control approach in structural topology optimization
 th World Congress on Structural and Multidisciplinary Optimisation 07 th -2 th, June 205, Sydney Australia An explicit feature control approach in structural topology optimization Weisheng Zhang, Xu Guo
th World Congress on Structural and Multidisciplinary Optimisation 07 th -2 th, June 205, Sydney Australia An explicit feature control approach in structural topology optimization Weisheng Zhang, Xu Guo
Outline. Level Set Methods. For Inverse Obstacle Problems 4. Introduction. Introduction. Martin Burger
 For Inverse Obstacle Problems Martin Burger Outline Introduction Optimal Geometries Inverse Obstacle Problems & Shape Optimization Sensitivity Analysis based on Gradient Flows Numerical Methods University
For Inverse Obstacle Problems Martin Burger Outline Introduction Optimal Geometries Inverse Obstacle Problems & Shape Optimization Sensitivity Analysis based on Gradient Flows Numerical Methods University
Unstructured Mesh Generation for Implicit Moving Geometries and Level Set Applications
 Unstructured Mesh Generation for Implicit Moving Geometries and Level Set Applications Per-Olof Persson (persson@mit.edu) Department of Mathematics Massachusetts Institute of Technology http://www.mit.edu/
Unstructured Mesh Generation for Implicit Moving Geometries and Level Set Applications Per-Olof Persson (persson@mit.edu) Department of Mathematics Massachusetts Institute of Technology http://www.mit.edu/
The Level Set Method. Lecture Notes, MIT J / 2.097J / 6.339J Numerical Methods for Partial Differential Equations
 The Level Set Method Lecture Notes, MIT 16.920J / 2.097J / 6.339J Numerical Methods for Partial Differential Equations Per-Olof Persson persson@mit.edu March 7, 2005 1 Evolving Curves and Surfaces Evolving
The Level Set Method Lecture Notes, MIT 16.920J / 2.097J / 6.339J Numerical Methods for Partial Differential Equations Per-Olof Persson persson@mit.edu March 7, 2005 1 Evolving Curves and Surfaces Evolving
PARAMETRIC SHAPE AND TOPOLOGY OPTIMIZATION WITH RADIAL BASIS FUNCTIONS
 PARAMETRIC SHAPE AND TOPOLOGY OPTIMIZATION WITH RADIAL BASIS FUNCTIONS Michael Yu Wang 1 and Shengyin Wang 1 Department of Automation and Computer-Aided Engineering The Chinese University of Hong Kong
PARAMETRIC SHAPE AND TOPOLOGY OPTIMIZATION WITH RADIAL BASIS FUNCTIONS Michael Yu Wang 1 and Shengyin Wang 1 Department of Automation and Computer-Aided Engineering The Chinese University of Hong Kong
ISOGEOMETRIC TOPOLOGY OPTIMIZATION OF STRUCTURES USING LEVEL SET METHOD INCORPORATING SENSITIVITY ANALYSIS
 INTERNATIONAL JOURNAL OF OPTIMIZATION IN CIVIL ENGINEERING Int. J. Optim. Civil Eng., 2016; 6(3):405-422 ISOGEOMETRIC TOPOLOGY OPTIMIZATION OF STRUCTURES USING LEVEL SET METHOD INCORPORATING SENSITIVITY
INTERNATIONAL JOURNAL OF OPTIMIZATION IN CIVIL ENGINEERING Int. J. Optim. Civil Eng., 2016; 6(3):405-422 ISOGEOMETRIC TOPOLOGY OPTIMIZATION OF STRUCTURES USING LEVEL SET METHOD INCORPORATING SENSITIVITY
Study of Different Strategies for Splitting Variables in Multidisciplinary Topology Optimization
 Applied Mathematical Sciences, vol. 8, 2014, no. 144, 7153-7174 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ams.2014.4298 Study of Different Strategies for Splitting Variables in Multidisciplinary
Applied Mathematical Sciences, vol. 8, 2014, no. 144, 7153-7174 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ams.2014.4298 Study of Different Strategies for Splitting Variables in Multidisciplinary
A Level Set-Based Topology Optimization Method For Three-Dimensional Acoustic Problems Using Fast Multipole Boundary Element Method
 9 th World Congress on Structural and Multidisciplinary Optimization June 13-17, 2011, Shizuoka, Japan A Level Set-Based Topology Optimization Method For Three-imensional Acoustic Problems Using Fast Multipole
9 th World Congress on Structural and Multidisciplinary Optimization June 13-17, 2011, Shizuoka, Japan A Level Set-Based Topology Optimization Method For Three-imensional Acoustic Problems Using Fast Multipole
Topology Optimization and JuMP
 Immense Potential and Challenges School of Engineering and Information Technology UNSW Canberra June 28, 2018 Introduction About Me First year PhD student at UNSW Canberra Multidisciplinary design optimization
Immense Potential and Challenges School of Engineering and Information Technology UNSW Canberra June 28, 2018 Introduction About Me First year PhD student at UNSW Canberra Multidisciplinary design optimization
TOPOLOGY OPTIMIZATION OF ELASTOMER DAMPING DEVICES FOR STRUCTURAL VIBRATION REDUCTION
 6th European Conference on Computational Mechanics (ECCM 6) 7th European Conference on Computational Fluid Dynamics (ECFD 7) 1115 June 2018, Glasgow, UK TOPOLOGY OPTIMIZATION OF ELASTOMER DAMPING DEVICES
6th European Conference on Computational Mechanics (ECCM 6) 7th European Conference on Computational Fluid Dynamics (ECFD 7) 1115 June 2018, Glasgow, UK TOPOLOGY OPTIMIZATION OF ELASTOMER DAMPING DEVICES
Non-Linear Finite Element Methods in Solid Mechanics Attilio Frangi, Politecnico di Milano, February 3, 2017, Lesson 1
 Non-Linear Finite Element Methods in Solid Mechanics Attilio Frangi, attilio.frangi@polimi.it Politecnico di Milano, February 3, 2017, Lesson 1 1 Politecnico di Milano, February 3, 2017, Lesson 1 2 Outline
Non-Linear Finite Element Methods in Solid Mechanics Attilio Frangi, attilio.frangi@polimi.it Politecnico di Milano, February 3, 2017, Lesson 1 1 Politecnico di Milano, February 3, 2017, Lesson 1 2 Outline
TOPOLOGY OPTIMIZATION WITH AN IMPLICIT FUNCTION AND PARAMETERIZED CUTTING SURFACE
 ECCOMAS Congress 2016 VII European Congress on Computational Methods in Applied Sciences and Engineering M. Papadrakakis, V. Papadopoulos, G. Stefanou, V. Plevris (eds.) Crete Island, Greece, 5 10 June
ECCOMAS Congress 2016 VII European Congress on Computational Methods in Applied Sciences and Engineering M. Papadrakakis, V. Papadopoulos, G. Stefanou, V. Plevris (eds.) Crete Island, Greece, 5 10 June
An Isoparametric Approach to Level Set Topology Optimization Using a Body-Fitted Finite Element Mesh
 An Isoparametric Approach to Level Set Topology Optimization Using a Body-Fitted Finite Element Mesh Kai A. James a, Joaquim R.R.A. Martins b a University of Toronto Institute for Aerospace Studies, Toronto,
An Isoparametric Approach to Level Set Topology Optimization Using a Body-Fitted Finite Element Mesh Kai A. James a, Joaquim R.R.A. Martins b a University of Toronto Institute for Aerospace Studies, Toronto,
Level Set Methods and Fast Marching Methods
 Level Set Methods and Fast Marching Methods I.Lyulina Scientific Computing Group May, 2002 Overview Existing Techniques for Tracking Interfaces Basic Ideas of Level Set Method and Fast Marching Method
Level Set Methods and Fast Marching Methods I.Lyulina Scientific Computing Group May, 2002 Overview Existing Techniques for Tracking Interfaces Basic Ideas of Level Set Method and Fast Marching Method
Predicting Tumour Location by Modelling the Deformation of the Breast using Nonlinear Elasticity
 Predicting Tumour Location by Modelling the Deformation of the Breast using Nonlinear Elasticity November 8th, 2006 Outline Motivation Motivation Motivation for Modelling Breast Deformation Mesh Generation
Predicting Tumour Location by Modelling the Deformation of the Breast using Nonlinear Elasticity November 8th, 2006 Outline Motivation Motivation Motivation for Modelling Breast Deformation Mesh Generation
Topology optimization in B-spline space
 Topology optimization in B-spline space Xiaoping Qian Mechanical, Materials, and Aerospace Engineering Department Illinois Institute of Technology Chicago, IL 60062, USA Email: qian@iit.edu Highlights
Topology optimization in B-spline space Xiaoping Qian Mechanical, Materials, and Aerospace Engineering Department Illinois Institute of Technology Chicago, IL 60062, USA Email: qian@iit.edu Highlights
SOLVING MULTI CONSTRAINTS STRUCTURAL TOPOLOGY OPTIMIZATION PROBLEM WITH REFORMULATION OF LEVEL SET METHOD
 INTERNATIONAL JOURNAL OF OPTIMIZATION IN CIVIL ENGINEERING Int. J. Optim. Civil Eng., 208; 8(2):255-274 SOLVING MULTI CONSTRAINTS STRUCTURAL TOPOLOGY OPTIMIZATION PROBLEM WITH REFORMULATION OF LEVEL SET
INTERNATIONAL JOURNAL OF OPTIMIZATION IN CIVIL ENGINEERING Int. J. Optim. Civil Eng., 208; 8(2):255-274 SOLVING MULTI CONSTRAINTS STRUCTURAL TOPOLOGY OPTIMIZATION PROBLEM WITH REFORMULATION OF LEVEL SET
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras. Lecture - 36
 Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras Lecture - 36 In last class, we have derived element equations for two d elasticity problems
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras Lecture - 36 In last class, we have derived element equations for two d elasticity problems
A topology-preserving level set method for shape optimization
 Journal of Computational Physics 204 (2005) 121 130 www.elsevier.com/locate/jcp A topology-preserving level set method for shape optimization Oleg Alexandrov *, Fadil Santosa University of Minnesota School
Journal of Computational Physics 204 (2005) 121 130 www.elsevier.com/locate/jcp A topology-preserving level set method for shape optimization Oleg Alexandrov *, Fadil Santosa University of Minnesota School
TOPOLOGY OPTIMIZATION USING A LEVEL SET PENALIZATION WITH CONSTRAINED TOPOLOGY FEATURES
 Clemson University TigerPrints All Theses Theses 8-2013 TOPOLOGY OPTIMIZATION USING A LEVEL SET PENALIZATION WITH CONSTRAINED TOPOLOGY FEATURES Luis Fernandez Clemson University, luisf@clemson.edu Follow
Clemson University TigerPrints All Theses Theses 8-2013 TOPOLOGY OPTIMIZATION USING A LEVEL SET PENALIZATION WITH CONSTRAINED TOPOLOGY FEATURES Luis Fernandez Clemson University, luisf@clemson.edu Follow
A Variational Binary Level Set Method for Structural Topology Optimization
 Commun. Comput. Phys. doi: 10.4208/cicp.160911.110512a Vol. 13, No. 5, pp. 1292-1308 May 2013 A Variational Binary Level Set Method for Structural Topology Optimization Xiaoxia ai 1, Peipei Tang 1,, Xiaoliang
Commun. Comput. Phys. doi: 10.4208/cicp.160911.110512a Vol. 13, No. 5, pp. 1292-1308 May 2013 A Variational Binary Level Set Method for Structural Topology Optimization Xiaoxia ai 1, Peipei Tang 1,, Xiaoliang
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
Surfaces and Integral Curves
 MODULE 1: MATHEMATICAL PRELIMINARIES 16 Lecture 3 Surfaces and Integral Curves In Lecture 3, we recall some geometrical concepts that are essential for understanding the nature of solutions of partial
MODULE 1: MATHEMATICAL PRELIMINARIES 16 Lecture 3 Surfaces and Integral Curves In Lecture 3, we recall some geometrical concepts that are essential for understanding the nature of solutions of partial
LECTURE 13: SOLUTION METHODS FOR CONSTRAINED OPTIMIZATION. 1. Primal approach 2. Penalty and barrier methods 3. Dual approach 4. Primal-dual approach
 LECTURE 13: SOLUTION METHODS FOR CONSTRAINED OPTIMIZATION 1. Primal approach 2. Penalty and barrier methods 3. Dual approach 4. Primal-dual approach Basic approaches I. Primal Approach - Feasible Direction
LECTURE 13: SOLUTION METHODS FOR CONSTRAINED OPTIMIZATION 1. Primal approach 2. Penalty and barrier methods 3. Dual approach 4. Primal-dual approach Basic approaches I. Primal Approach - Feasible Direction
Topology optimization of continuum structures with ɛ-relaxed stress constraints
 Topology optimization of continuum structures with ɛ-relaxed stress constraints C.E.M. Guilherme and J.S.O. Fonseca Federal University of Rio Grande do Sul, RS Brazil Abstract Topology optimization of
Topology optimization of continuum structures with ɛ-relaxed stress constraints C.E.M. Guilherme and J.S.O. Fonseca Federal University of Rio Grande do Sul, RS Brazil Abstract Topology optimization of
TOPOLOGY OPTIMIZATION OF CONTINUUM STRUCTURES
 TOPOLOGY OPTIMIZATION OF CONTINUUM STRUCTURES USING OPTIMALITY CRITERION APPROACH IN ANSYS Dheeraj Gunwant & Anadi Misra Department of Mechanical Engineering, G. B. Pant University of Agriculture and Technology,
TOPOLOGY OPTIMIZATION OF CONTINUUM STRUCTURES USING OPTIMALITY CRITERION APPROACH IN ANSYS Dheeraj Gunwant & Anadi Misra Department of Mechanical Engineering, G. B. Pant University of Agriculture and Technology,
Simultaneous optimization of cast part and parting direction using level set method
 Struct Multidisc Optim (20) 44:75 759 DOI 0.007/s0058-0-0690-3 INDUSTRIAL APPLICATION Simultaneous optimization of cast part and parting direction using level set method Qi Xia Tielin Shi Michael Yu Wang
Struct Multidisc Optim (20) 44:75 759 DOI 0.007/s0058-0-0690-3 INDUSTRIAL APPLICATION Simultaneous optimization of cast part and parting direction using level set method Qi Xia Tielin Shi Michael Yu Wang
Topology Optimization of Two Linear Elastic Bodies in Unilateral Contact
 2 nd International Conference on Engineering Optimization September 6-9, 2010, Lisbon, Portugal Topology Optimization of Two Linear Elastic Bodies in Unilateral Contact Niclas Strömberg Department of Mechanical
2 nd International Conference on Engineering Optimization September 6-9, 2010, Lisbon, Portugal Topology Optimization of Two Linear Elastic Bodies in Unilateral Contact Niclas Strömberg Department of Mechanical
Shape Gradient for Isogeometric Structural Design
 Shape Gradient for Isogeometric Structural Design Louis Blanchard, Régis Duvigneau, Anh-Vu Vuong, Bernd Simeon To cite this version: Louis Blanchard, Régis Duvigneau, Anh-Vu Vuong, Bernd Simeon. Shape
Shape Gradient for Isogeometric Structural Design Louis Blanchard, Régis Duvigneau, Anh-Vu Vuong, Bernd Simeon To cite this version: Louis Blanchard, Régis Duvigneau, Anh-Vu Vuong, Bernd Simeon. Shape
Global and clustered approaches for stress constrained topology optimization and deactivation of design variables
 th World Congress on Structural and Multidisciplinary Optimization May 9-24, 23, Orlando, Florida, USA Global and clustered approaches for stress constrained topology optimization and deactivation of design
th World Congress on Structural and Multidisciplinary Optimization May 9-24, 23, Orlando, Florida, USA Global and clustered approaches for stress constrained topology optimization and deactivation of design
OPTIMAL DAMPING OF A MEMBRANE AND TOPOLOGICAL SHAPE OPTIMIZATION
 OPTIMAL DAMPING OF A MEMBRANE AND TOPOLOGICAL SHAPE OPTIMIZATION TONI LASSILA ABSTRACT. We consider a shape optimization problem of finding the optimal damping set of a two-dimensional membrane such that
OPTIMAL DAMPING OF A MEMBRANE AND TOPOLOGICAL SHAPE OPTIMIZATION TONI LASSILA ABSTRACT. We consider a shape optimization problem of finding the optimal damping set of a two-dimensional membrane such that
Efficient Use of Iterative Solvers in Nested Topology Optimization
 Efficient Use of Iterative Solvers in Nested Topology Optimization Oded Amir, Mathias Stolpe and Ole Sigmund Technical University of Denmark Department of Mathematics Department of Mechanical Engineering
Efficient Use of Iterative Solvers in Nested Topology Optimization Oded Amir, Mathias Stolpe and Ole Sigmund Technical University of Denmark Department of Mathematics Department of Mechanical Engineering
Meshless Modeling, Animating, and Simulating Point-Based Geometry
 Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces.
 weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
Comput. Methods Appl. Mech. Engrg.
 Comput. Methods Appl. Mech. Engrg. xxx (2010) xxx xxx Contents lists available at Scienceirect Comput. Methods Appl. Mech. Engrg. journal homepage: www.elsevier.comlocatecma A topology optimization method
Comput. Methods Appl. Mech. Engrg. xxx (2010) xxx xxx Contents lists available at Scienceirect Comput. Methods Appl. Mech. Engrg. journal homepage: www.elsevier.comlocatecma A topology optimization method
Comparative Study of Topological Optimization of Beam and Ring Type Structures under static Loading Condition
 Comparative Study of Topological Optimization of Beam and Ring Type Structures under static Loading Condition Vani Taklikar 1, Anadi Misra 2 P.G. Student, Department of Mechanical Engineering, G.B.P.U.A.T,
Comparative Study of Topological Optimization of Beam and Ring Type Structures under static Loading Condition Vani Taklikar 1, Anadi Misra 2 P.G. Student, Department of Mechanical Engineering, G.B.P.U.A.T,
STRUCTURAL TOPOLOGY OPTIMIZATION SUBJECTED TO RELAXED STRESS AND DESIGN VARIABLES
 STRUCTURAL TOPOLOGY OPTIMIZATION SUBJECTED TO RELAXED STRESS AND DESIGN VARIABLES Hailu Shimels Gebremedhen, Dereje Engida Woldemichael and Fakhruldin M. Hashim Mechanical Engineering Department, Universiti
STRUCTURAL TOPOLOGY OPTIMIZATION SUBJECTED TO RELAXED STRESS AND DESIGN VARIABLES Hailu Shimels Gebremedhen, Dereje Engida Woldemichael and Fakhruldin M. Hashim Mechanical Engineering Department, Universiti
Element energy based method for topology optimization
 th World Congress on Structural and Multidisciplinary Optimization May 9-24, 23, Orlando, Florida, USA Element energy based method for topology optimization Vladimir Uskov Central Aerohydrodynamic Institute
th World Congress on Structural and Multidisciplinary Optimization May 9-24, 23, Orlando, Florida, USA Element energy based method for topology optimization Vladimir Uskov Central Aerohydrodynamic Institute
A POST-PROCESSING PROCEDURE FOR LEVEL SET BASED TOPOLOGY OPTIMIZATION. Y. Xian, and D. W. Rosen*
 Solid Freeform Fabrication 2017: Proceedings of the 28th Annual International Solid Freeform Fabrication Symposium An Additive Manufacturing Conference A POST-PROCESSING PROCEDURE FOR LEVEL SET BASED TOPOLOGY
Solid Freeform Fabrication 2017: Proceedings of the 28th Annual International Solid Freeform Fabrication Symposium An Additive Manufacturing Conference A POST-PROCESSING PROCEDURE FOR LEVEL SET BASED TOPOLOGY
C3 Numerical methods
 Verulam School C3 Numerical methods 138 min 108 marks 1. (a) The diagram shows the curve y =. The region R, shaded in the diagram, is bounded by the curve and by the lines x = 1, x = 5 and y = 0. The region
Verulam School C3 Numerical methods 138 min 108 marks 1. (a) The diagram shows the curve y =. The region R, shaded in the diagram, is bounded by the curve and by the lines x = 1, x = 5 and y = 0. The region
Definition A metric space is proper if all closed balls are compact. The length pseudo metric of a metric space X is given by.
 Chapter 1 Geometry: Nuts and Bolts 1.1 Metric Spaces Definition 1.1.1. A metric space is proper if all closed balls are compact. The length pseudo metric of a metric space X is given by (x, y) inf p. p:x
Chapter 1 Geometry: Nuts and Bolts 1.1 Metric Spaces Definition 1.1.1. A metric space is proper if all closed balls are compact. The length pseudo metric of a metric space X is given by (x, y) inf p. p:x
Snakes, Active Contours, and Segmentation Introduction and Classical Active Contours Active Contours Without Edges
 Level Sets & Snakes Snakes, Active Contours, and Segmentation Introduction and Classical Active Contours Active Contours Without Edges Scale Space and PDE methods in image analysis and processing - Arjan
Level Sets & Snakes Snakes, Active Contours, and Segmentation Introduction and Classical Active Contours Active Contours Without Edges Scale Space and PDE methods in image analysis and processing - Arjan
STRUCTURAL & MULTIDISCIPLINARY OPTIMIZATION
 STRUCTURAL & MULTIDISCIPLINARY OPTIMIZATION Pierre DUYSINX Patricia TOSSINGS Department of Aerospace and Mechanical Engineering Academic year 2018-2019 1 Course objectives To become familiar with the introduction
STRUCTURAL & MULTIDISCIPLINARY OPTIMIZATION Pierre DUYSINX Patricia TOSSINGS Department of Aerospace and Mechanical Engineering Academic year 2018-2019 1 Course objectives To become familiar with the introduction
Critical study of design parameterization in topology optimization; The influence of design parameterization on local minima
 2 nd International Conference on Engineering Optimization September 6-9, 21, Lisbon, Portugal Critical study of design parameterization in topology optimization; The influence of design parameterization
2 nd International Conference on Engineering Optimization September 6-9, 21, Lisbon, Portugal Critical study of design parameterization in topology optimization; The influence of design parameterization
A nodal based evolutionary structural optimisation algorithm
 Computer Aided Optimum Design in Engineering IX 55 A dal based evolutionary structural optimisation algorithm Y.-M. Chen 1, A. J. Keane 2 & C. Hsiao 1 1 ational Space Program Office (SPO), Taiwan 2 Computational
Computer Aided Optimum Design in Engineering IX 55 A dal based evolutionary structural optimisation algorithm Y.-M. Chen 1, A. J. Keane 2 & C. Hsiao 1 1 ational Space Program Office (SPO), Taiwan 2 Computational
CHAPTER 1. Introduction
 ME 475: Computer-Aided Design of Structures 1-1 CHAPTER 1 Introduction 1.1 Analysis versus Design 1.2 Basic Steps in Analysis 1.3 What is the Finite Element Method? 1.4 Geometrical Representation, Discretization
ME 475: Computer-Aided Design of Structures 1-1 CHAPTER 1 Introduction 1.1 Analysis versus Design 1.2 Basic Steps in Analysis 1.3 What is the Finite Element Method? 1.4 Geometrical Representation, Discretization
What is Computer Vision?
 Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Chapter 6. Curves and Surfaces. 6.1 Graphs as Surfaces
 Chapter 6 Curves and Surfaces In Chapter 2 a plane is defined as the zero set of a linear function in R 3. It is expected a surface is the zero set of a differentiable function in R n. To motivate, graphs
Chapter 6 Curves and Surfaces In Chapter 2 a plane is defined as the zero set of a linear function in R 3. It is expected a surface is the zero set of a differentiable function in R n. To motivate, graphs
Module 1 Lecture Notes 2. Optimization Problem and Model Formulation
 Optimization Methods: Introduction and Basic concepts 1 Module 1 Lecture Notes 2 Optimization Problem and Model Formulation Introduction In the previous lecture we studied the evolution of optimization
Optimization Methods: Introduction and Basic concepts 1 Module 1 Lecture Notes 2 Optimization Problem and Model Formulation Introduction In the previous lecture we studied the evolution of optimization
INSTRUCTIONAL PLAN L( 3 ) T ( ) P ( ) Instruction Plan Details: DELHI COLLEGE OF TECHNOLOGY & MANAGEMENT(DCTM), PALWAL
 T ( ) P ( ) Instruction Plan Details: DELHI COLLEGE OF TECHNOLOGY & MANAGEMENT(DCTM), PALWAL") DELHI COLLEGE OF TECHNOLOGY & MANAGEMENT(DCTM), PALWAL INSTRUCTIONAL PLAN RECORD NO.: QF/ACD/009 Revision No.: 00 Name of Faculty: Course Title: Theory of elasticity L( 3 ) T ( ) P ( ) Department: Mechanical
DELHI COLLEGE OF TECHNOLOGY & MANAGEMENT(DCTM), PALWAL INSTRUCTIONAL PLAN RECORD NO.: QF/ACD/009 Revision No.: 00 Name of Faculty: Course Title: Theory of elasticity L( 3 ) T ( ) P ( ) Department: Mechanical
BACK AND FORTH ERROR COMPENSATION AND CORRECTION METHODS FOR REMOVING ERRORS INDUCED BY UNEVEN GRADIENTS OF THE LEVEL SET FUNCTION
 BACK AND FORTH ERROR COMPENSATION AND CORRECTION METHODS FOR REMOVING ERRORS INDUCED BY UNEVEN GRADIENTS OF THE LEVEL SET FUNCTION TODD F. DUPONT AND YINGJIE LIU Abstract. We propose a method that significantly
BACK AND FORTH ERROR COMPENSATION AND CORRECTION METHODS FOR REMOVING ERRORS INDUCED BY UNEVEN GRADIENTS OF THE LEVEL SET FUNCTION TODD F. DUPONT AND YINGJIE LIU Abstract. We propose a method that significantly
Level set methods Formulation of Interface Propagation Boundary Value PDE Initial Value PDE Motion in an externally generated velocity field
 Level Set Methods Overview Level set methods Formulation of Interface Propagation Boundary Value PDE Initial Value PDE Motion in an externally generated velocity field Convection Upwind ddifferencingi
Level Set Methods Overview Level set methods Formulation of Interface Propagation Boundary Value PDE Initial Value PDE Motion in an externally generated velocity field Convection Upwind ddifferencingi
Topology Optimization of Multiple Load Case Structures
 Topology Optimization of Multiple Load Case Structures Rafael Santos Iwamura Exectuive Aviation Engineering Department EMBRAER S.A. rafael.iwamura@embraer.com.br Alfredo Rocha de Faria Department of Mechanical
Topology Optimization of Multiple Load Case Structures Rafael Santos Iwamura Exectuive Aviation Engineering Department EMBRAER S.A. rafael.iwamura@embraer.com.br Alfredo Rocha de Faria Department of Mechanical
CURVILINEAR MESH GENERATION IN 3D
 CURVILINEAR MESH GENERATION IN 3D Saikat Dey, Robert M. O'Bara 2 and Mark S. Shephard 2 SFA Inc. / Naval Research Laboratory, Largo, MD., U.S.A., dey@cosmic.nrl.navy.mil 2 Scientific Computation Research
CURVILINEAR MESH GENERATION IN 3D Saikat Dey, Robert M. O'Bara 2 and Mark S. Shephard 2 SFA Inc. / Naval Research Laboratory, Largo, MD., U.S.A., dey@cosmic.nrl.navy.mil 2 Scientific Computation Research
An introduction to mesh generation Part IV : elliptic meshing
 Elliptic An introduction to mesh generation Part IV : elliptic meshing Department of Civil Engineering, Université catholique de Louvain, Belgium Elliptic Curvilinear Meshes Basic concept A curvilinear
Elliptic An introduction to mesh generation Part IV : elliptic meshing Department of Civil Engineering, Université catholique de Louvain, Belgium Elliptic Curvilinear Meshes Basic concept A curvilinear
Lecture 12 Level Sets & Parametric Transforms. sec & ch. 11 of Machine Vision by Wesley E. Snyder & Hairong Qi
 Lecture 12 Level Sets & Parametric Transforms sec. 8.5.2 & ch. 11 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2017 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these
Lecture 12 Level Sets & Parametric Transforms sec. 8.5.2 & ch. 11 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2017 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these
Computers and Structures
 Computers and Structures 9 91 (212) 97 6 Contents lists available at SciVerse ScienceDirect Computers and Structures journal homepage: www.elsevier.com/locate/compstruc An isoparametric approach to level
Computers and Structures 9 91 (212) 97 6 Contents lists available at SciVerse ScienceDirect Computers and Structures journal homepage: www.elsevier.com/locate/compstruc An isoparametric approach to level
CS205b/CME306. Lecture 9
 CS205b/CME306 Lecture 9 1 Convection Supplementary Reading: Osher and Fedkiw, Sections 3.3 and 3.5; Leveque, Sections 6.7, 8.3, 10.2, 10.4. For a reference on Newton polynomial interpolation via divided
CS205b/CME306 Lecture 9 1 Convection Supplementary Reading: Osher and Fedkiw, Sections 3.3 and 3.5; Leveque, Sections 6.7, 8.3, 10.2, 10.4. For a reference on Newton polynomial interpolation via divided
An Active Contour Model without Edges
 An Active Contour Model without Edges Tony Chan and Luminita Vese Department of Mathematics, University of California, Los Angeles, 520 Portola Plaza, Los Angeles, CA 90095-1555 chan,lvese@math.ucla.edu
An Active Contour Model without Edges Tony Chan and Luminita Vese Department of Mathematics, University of California, Los Angeles, 520 Portola Plaza, Los Angeles, CA 90095-1555 chan,lvese@math.ucla.edu
An efficient filtered scheme for some first order Hamilton-Jacobi-Bellman equat
 An efficient filtered scheme for some first order Hamilton-Jacobi-Bellman equations joint work with Olivier Bokanowski 2 and Maurizio Falcone SAPIENZA - Università di Roma 2 Laboratoire Jacques-Louis Lions,
An efficient filtered scheme for some first order Hamilton-Jacobi-Bellman equations joint work with Olivier Bokanowski 2 and Maurizio Falcone SAPIENZA - Università di Roma 2 Laboratoire Jacques-Louis Lions,
Flow Control of Curved Air Ducts using Topological Derivatives
 8 th World Congress on Structural and Multidisciplinary Optimization June 1-5, 2009, Lisbon, Portugal Flow Control of Curved Air Ducts using Topological Derivatives Jonathan Chetboun 1,2, Grégoire Allaire
8 th World Congress on Structural and Multidisciplinary Optimization June 1-5, 2009, Lisbon, Portugal Flow Control of Curved Air Ducts using Topological Derivatives Jonathan Chetboun 1,2, Grégoire Allaire
Lagrangian Relaxation: An overview
 Discrete Math for Bioinformatics WS 11/12:, by A. Bockmayr/K. Reinert, 22. Januar 2013, 13:27 4001 Lagrangian Relaxation: An overview Sources for this lecture: D. Bertsimas and J. Tsitsiklis: Introduction
Discrete Math for Bioinformatics WS 11/12:, by A. Bockmayr/K. Reinert, 22. Januar 2013, 13:27 4001 Lagrangian Relaxation: An overview Sources for this lecture: D. Bertsimas and J. Tsitsiklis: Introduction
MULTI-MATERIAL TOPOLOGY OPTIMIZATION FOR COMPOSITE METAL AIRCRAFT STRUCTURES Cheng Liu 1, Mehdi Yasaee 2, Iman Dayyani 3 1
 MULTI-MATERIAL TOPOLOGY OPTIMIZATION FOR COMPOSITE METAL AIRCRAFT STRUCTURES Cheng Liu 1, Mehdi Yasaee 2, Iman ayyani 3 1 School of Aerospace, Transport and Manufacturing, Cranfield University, Cranfield,
MULTI-MATERIAL TOPOLOGY OPTIMIZATION FOR COMPOSITE METAL AIRCRAFT STRUCTURES Cheng Liu 1, Mehdi Yasaee 2, Iman ayyani 3 1 School of Aerospace, Transport and Manufacturing, Cranfield University, Cranfield,
Background for Surface Integration
 Background for urface Integration 1 urface Integrals We have seen in previous work how to define and compute line integrals in R 2. You should remember the basic surface integrals that we will need to
Background for urface Integration 1 urface Integrals We have seen in previous work how to define and compute line integrals in R 2. You should remember the basic surface integrals that we will need to
VERSION 4.3. Introduction to Optimization Module
 VERSION 4.3 Introduction to Optimization Module Introduction to the Optimization Module 1998 2012 COMSOL Protected by U.S. Patents 7,519,518; 7,596,474; and 7,623,991. Patents pending. This Documentation
VERSION 4.3 Introduction to Optimization Module Introduction to the Optimization Module 1998 2012 COMSOL Protected by U.S. Patents 7,519,518; 7,596,474; and 7,623,991. Patents pending. This Documentation
Level lines based disocclusion
 Level lines based disocclusion Simon Masnou Jean-Michel Morel CEREMADE CMLA Université Paris-IX Dauphine Ecole Normale Supérieure de Cachan 75775 Paris Cedex 16, France 94235 Cachan Cedex, France Abstract
Level lines based disocclusion Simon Masnou Jean-Michel Morel CEREMADE CMLA Université Paris-IX Dauphine Ecole Normale Supérieure de Cachan 75775 Paris Cedex 16, France 94235 Cachan Cedex, France Abstract
Some existence results for Chebyshev nets with singularities
 Some existence results for Yannick Masson (Cermics, University Paris-Est) joint work with O. Baverel, A. Ern, L. Hauswirth, A. Lebée, L. Monasse 9th International Conference on Mathematical Methods for
Some existence results for Yannick Masson (Cermics, University Paris-Est) joint work with O. Baverel, A. Ern, L. Hauswirth, A. Lebée, L. Monasse 9th International Conference on Mathematical Methods for
Value function and optimal trajectories for a control problem with supremum cost function and state constraints
 Value function and optimal trajectories for a control problem with supremum cost function and state constraints Hasnaa Zidani ENSTA ParisTech, University of Paris-Saclay joint work with: A. Assellaou,
Value function and optimal trajectories for a control problem with supremum cost function and state constraints Hasnaa Zidani ENSTA ParisTech, University of Paris-Saclay joint work with: A. Assellaou,
Guidelines for proper use of Plate elements
 Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
PRIMAL-DUAL INTERIOR POINT METHOD FOR LINEAR PROGRAMMING. 1. Introduction
 PRIMAL-DUAL INTERIOR POINT METHOD FOR LINEAR PROGRAMMING KELLER VANDEBOGERT AND CHARLES LANNING 1. Introduction Interior point methods are, put simply, a technique of optimization where, given a problem
PRIMAL-DUAL INTERIOR POINT METHOD FOR LINEAR PROGRAMMING KELLER VANDEBOGERT AND CHARLES LANNING 1. Introduction Interior point methods are, put simply, a technique of optimization where, given a problem
Automated Segmentation Using a Fast Implementation of the Chan-Vese Models
 Automated Segmentation Using a Fast Implementation of the Chan-Vese Models Huan Xu, and Xiao-Feng Wang,,3 Intelligent Computation Lab, Hefei Institute of Intelligent Machines, Chinese Academy of Science,
Automated Segmentation Using a Fast Implementation of the Chan-Vese Models Huan Xu, and Xiao-Feng Wang,,3 Intelligent Computation Lab, Hefei Institute of Intelligent Machines, Chinese Academy of Science,
Programming, numerics and optimization
 Programming, numerics and optimization Lecture C-4: Constrained optimization Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428 June
Programming, numerics and optimization Lecture C-4: Constrained optimization Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428 June
DEVELOPMENT OF A SEPARABLE CAR SEAT TYPE MULTI FUNCTIONAL STROLLER BY OPTIMIZATION
 Proceedings of the International Conference on Mechanical Engineering 2009 (ICME2009) 26-28 December 2009, Dhaka, Bangladesh ICME09- DEVELOPMENT OF A SEPARABLE CAR SEAT TYPE MULTI FUNCTIONAL STROLLER BY
Proceedings of the International Conference on Mechanical Engineering 2009 (ICME2009) 26-28 December 2009, Dhaka, Bangladesh ICME09- DEVELOPMENT OF A SEPARABLE CAR SEAT TYPE MULTI FUNCTIONAL STROLLER BY
Inverse and Implicit functions
 CHAPTER 3 Inverse and Implicit functions. Inverse Functions and Coordinate Changes Let U R d be a domain. Theorem. (Inverse function theorem). If ϕ : U R d is differentiable at a and Dϕ a is invertible,
CHAPTER 3 Inverse and Implicit functions. Inverse Functions and Coordinate Changes Let U R d be a domain. Theorem. (Inverse function theorem). If ϕ : U R d is differentiable at a and Dϕ a is invertible,
Projection-Based Methods in Optimization
 Projection-Based Methods in Optimization Charles Byrne (Charles Byrne@uml.edu) http://faculty.uml.edu/cbyrne/cbyrne.html Department of Mathematical Sciences University of Massachusetts Lowell Lowell, MA
Projection-Based Methods in Optimization Charles Byrne (Charles Byrne@uml.edu) http://faculty.uml.edu/cbyrne/cbyrne.html Department of Mathematical Sciences University of Massachusetts Lowell Lowell, MA
Supplementary Materials for
 advances.sciencemag.org/cgi/content/full/4/1/eaao7005/dc1 Supplementary Materials for Computational discovery of extremal microstructure families The PDF file includes: Desai Chen, Mélina Skouras, Bo Zhu,
advances.sciencemag.org/cgi/content/full/4/1/eaao7005/dc1 Supplementary Materials for Computational discovery of extremal microstructure families The PDF file includes: Desai Chen, Mélina Skouras, Bo Zhu,
SIA Conference, March 2015, France. Session - Optimization. «RODIN Project» RODIN Robust structural Optimization for Design in INdustry
 SIA Conference, 18-19 March 2015, France Session - Optimization «RODIN Project» Marc Albertelli Research engineer and coordinator of RODIN project RODIN Robust structural Optimization for Design in INdustry
SIA Conference, 18-19 March 2015, France Session - Optimization «RODIN Project» Marc Albertelli Research engineer and coordinator of RODIN project RODIN Robust structural Optimization for Design in INdustry
Math 113 Calculus III Final Exam Practice Problems Spring 2003
 Math 113 Calculus III Final Exam Practice Problems Spring 23 1. Let g(x, y, z) = 2x 2 + y 2 + 4z 2. (a) Describe the shapes of the level surfaces of g. (b) In three different graphs, sketch the three cross
Math 113 Calculus III Final Exam Practice Problems Spring 23 1. Let g(x, y, z) = 2x 2 + y 2 + 4z 2. (a) Describe the shapes of the level surfaces of g. (b) In three different graphs, sketch the three cross
Dr. Ulas Bagci
 Lecture 9: Deformable Models and Segmentation CAP-Computer Vision Lecture 9-Deformable Models and Segmentation Dr. Ulas Bagci bagci@ucf.edu Lecture 9: Deformable Models and Segmentation Motivation A limitation
Lecture 9: Deformable Models and Segmentation CAP-Computer Vision Lecture 9-Deformable Models and Segmentation Dr. Ulas Bagci bagci@ucf.edu Lecture 9: Deformable Models and Segmentation Motivation A limitation
Introduction to Design Optimization
 Introduction to Design Optimization First Edition Krishnan Suresh i Dedicated to my family. They mean the world to me. ii Origins of this Text Preface Like many other textbooks, this text has evolved from
Introduction to Design Optimization First Edition Krishnan Suresh i Dedicated to my family. They mean the world to me. ii Origins of this Text Preface Like many other textbooks, this text has evolved from
Geometrical Modeling of the Heart
 Geometrical Modeling of the Heart Olivier Rousseau University of Ottawa The Project Goal: Creation of a precise geometrical model of the heart Applications: Numerical calculations Dynamic of the blood
Geometrical Modeling of the Heart Olivier Rousseau University of Ottawa The Project Goal: Creation of a precise geometrical model of the heart Applications: Numerical calculations Dynamic of the blood
TOPOLOGY DESIGN USING B-SPLINE FINITE ELEMENTS
 TOPOLOGY DESIGN USING B-SPLINE FINITE ELEMENTS By ANAND PARTHASARATHY A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF
TOPOLOGY DESIGN USING B-SPLINE FINITE ELEMENTS By ANAND PARTHASARATHY A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF
 Set No. 1 IV B.Tech. I Semester Regular Examinations, November 2010 FINITE ELEMENT METHODS (Mechanical Engineering) Time: 3 Hours Max Marks: 80 Answer any FIVE Questions All Questions carry equal marks
Set No. 1 IV B.Tech. I Semester Regular Examinations, November 2010 FINITE ELEMENT METHODS (Mechanical Engineering) Time: 3 Hours Max Marks: 80 Answer any FIVE Questions All Questions carry equal marks
Application of Finite Volume Method for Structural Analysis
 Application of Finite Volume Method for Structural Analysis Saeed-Reza Sabbagh-Yazdi and Milad Bayatlou Associate Professor, Civil Engineering Department of KNToosi University of Technology, PostGraduate
Application of Finite Volume Method for Structural Analysis Saeed-Reza Sabbagh-Yazdi and Milad Bayatlou Associate Professor, Civil Engineering Department of KNToosi University of Technology, PostGraduate
Lecture 7: Support Vector Machine
 Lecture 7: Support Vector Machine Hien Van Nguyen University of Houston 9/28/2017 Separating hyperplane Red and green dots can be separated by a separating hyperplane Two classes are separable, i.e., each
Lecture 7: Support Vector Machine Hien Van Nguyen University of Houston 9/28/2017 Separating hyperplane Red and green dots can be separated by a separating hyperplane Two classes are separable, i.e., each
Path Planning and Numerical Methods for Static (Time-Independent / Stationary) Hamilton-Jacobi Equations
 Hamilton-Jacobi Equations") Path Planning and Numerical Methods for Static (Time-Independent / Stationary) Hamilton-Jacobi Equations Ian Mitchell Department of Computer Science University of British Columbia Outline Path Planning
Path Planning and Numerical Methods for Static (Time-Independent / Stationary) Hamilton-Jacobi Equations Ian Mitchell Department of Computer Science University of British Columbia Outline Path Planning
An Eulerian Approach for Computing the Finite Time Lyapunov Exponent (FTLE)
") An Eulerian Approach for Computing the Finite Time Lyapunov Exponent (FTLE) Shingyu Leung Department of Mathematics, Hong Kong University of Science and Technology masyleung@ust.hk May, Shingyu Leung (HKUST)
An Eulerian Approach for Computing the Finite Time Lyapunov Exponent (FTLE) Shingyu Leung Department of Mathematics, Hong Kong University of Science and Technology masyleung@ust.hk May, Shingyu Leung (HKUST)
Imagery for 3D geometry design: application to fluid flows.
 Imagery for 3D geometry design: application to fluid flows. C. Galusinski, C. Nguyen IMATH, Université du Sud Toulon Var, Supported by ANR Carpeinter May 14, 2010 Toolbox Ginzburg-Landau. Skeleton 3D extension
Imagery for 3D geometry design: application to fluid flows. C. Galusinski, C. Nguyen IMATH, Université du Sud Toulon Var, Supported by ANR Carpeinter May 14, 2010 Toolbox Ginzburg-Landau. Skeleton 3D extension
APPROXIMATING PDE s IN L 1
 APPROXIMATING PDE s IN L 1 Veselin Dobrev Jean-Luc Guermond Bojan Popov Department of Mathematics Texas A&M University NONLINEAR APPROXIMATION TECHNIQUES USING L 1 Texas A&M May 16-18, 2008 Outline 1 Outline
APPROXIMATING PDE s IN L 1 Veselin Dobrev Jean-Luc Guermond Bojan Popov Department of Mathematics Texas A&M University NONLINEAR APPROXIMATION TECHNIQUES USING L 1 Texas A&M May 16-18, 2008 Outline 1 Outline
HONOM EUROPEAN WORKSHOP on High Order Nonlinear Numerical Methods for Evolutionary PDEs, Bordeaux, March 18-22, 2013
 HONOM 2013 EUROPEAN WORKSHOP on High Order Nonlinear Numerical Methods for Evolutionary PDEs, Bordeaux, March 18-22, 2013 A priori-based mesh adaptation for third-order accurate Euler simulation Alexandre
HONOM 2013 EUROPEAN WORKSHOP on High Order Nonlinear Numerical Methods for Evolutionary PDEs, Bordeaux, March 18-22, 2013 A priori-based mesh adaptation for third-order accurate Euler simulation Alexandre
An isogeometric approach to topology optimization of multimaterial and functionally graded structures
 An isogeometric approach to topology optimization of multimaterial and functionally graded structures Alireza H. Taheri, Krishnan Suresh * Department of Mechanical Engineering, UW-Madison, Madison, Wisconsin
An isogeometric approach to topology optimization of multimaterial and functionally graded structures Alireza H. Taheri, Krishnan Suresh * Department of Mechanical Engineering, UW-Madison, Madison, Wisconsin
A critical comparative assessment of differential equation-driven methods for structural topology optimization
 Struct Multidisc Optim (2013) 48:685 710 DOI 10.1007/s00158-013-0935-4 REVIEW ARTICLE A critical comparative assessment of differential equation-driven methods for structural topology optimization Arun
Struct Multidisc Optim (2013) 48:685 710 DOI 10.1007/s00158-013-0935-4 REVIEW ARTICLE A critical comparative assessment of differential equation-driven methods for structural topology optimization Arun
Numerical Method in Optimization as a Multi-stage Decision Control System
 Numerical Method in Optimization as a Multi-stage Decision Control System B.S. GOH Institute of Mathematical Sciences University of Malaya 50603 Kuala Lumpur MLYSI gohoptimum@gmail.com bstract: - Numerical
Numerical Method in Optimization as a Multi-stage Decision Control System B.S. GOH Institute of Mathematical Sciences University of Malaya 50603 Kuala Lumpur MLYSI gohoptimum@gmail.com bstract: - Numerical