Convex Hulls in Three Dimensions. Polyhedra
|
|
|
- Rodger Stevens
- 6 years ago
- Views:
Transcription
1 Convex Hulls in Three Dimensions Polyhedra
2 Polyhedron 1.A polyhedron is the generalization of a 2- D polygon to 3-D A finite number of flat polygonal faces The boundary or surface of a polyhedron - Zero-dimensional vertices (points) - One-dimensional edges (segments) - Two-dimensional faces (polygons)
3 Introduction
4 Polyhedron 1.In summary, the boundary of a polyhedron is a finite collection of planar, bounded convex polygonal faces such that 1. The faces intersect properly; 2. The neighborhood of every point is topologically an open disk, or the link of every vertex is a simple polygonal chain; and 3. The surface is connected, or the 1-skeleton is connected
5 Polyhedron 1.Convex polyhedra are called polytopes 2.Polytopes can be specified locally by requiring that all dihedral angles be convex. 3.Dihedral angles are the internal angles in space at an edge between the planes containing its two incident faces
6 Regular Polytopes 1.Regular polyhedra 1.Called regular polytopes 2.All faces are regular polygons 3.The number of faces incident to each vertex is the same for all vertices 4.These conditions imply equal dihedral angles 2.There are only five distinct types of regular polytopes, known as the Platonic solids
7 Regular Polytopes 1.We have v angles, each π(1 2/p), which must sum to less than 2π 2.Both p and v are of course integers and obviously p 3, v 3
8 Regular Polytopes 1.These constraints suffice to limit the possibilities to those listed in Table For example, p = 4 and v = 4 leads (p - 2)(v - 2) = 4, violating the inequality
9 Regular Polytopes
10 Euler s Formula 1.In 1758 Leonard Euler noticed a remarkable regularity in the numbers of vertices, edges, and faces of a polyhedron 2.The number of vertices and faces together is always two more than the number of edges 3.Let V, E, and F be the number of vertices, edges, and faces respectively 4.Euler s formula is: 5.V E + F = 2
11 Proof of Euler s Formula
12 Consequence: Linearity 1.Theorem For a polyhedron with V = n, E, and F vertices, edges, and faces respectively; V E + F = 2, and both E and F are O(n)
13 Convex Hulls in Three Dimensions Hull Algorithms
14 Gift Wrapping 1.A careful implementation can achieve O(n 2 ) time complexity 2.O(n) work per face, and the number of faces is O(n) 3.As in two dimensions, this algorithm has the advantage of being output-size sensitive: 4.O(nF) for a hull of F faces
15 Divide and Conquer 1.The only lower bound for constructing the hull in three dimensions is the same as for two dimensions: Ω(nlogn) 2.The paradigm is the same as in two dimensions: 1. Sort the points by their x coordinate 2. Divide into two sets 3. Recursively construct the hull of each half 4. Merge 3.All the work is in the merge
16 Divide and Conquer 1.Let A and B be the two hulls to be merged 2.The hull of A B will add a single band of faces with the topology of a cylinder without endcaps 3.See Figure 4.5(b) 4.The number of these faces will be linear in the size of the two polytopes 5.Each face uses at least one edge of either A or B, so the number of faces is no more than the total number of edges 6.Thus it is feasible to perform the merge in linear time

17 Divide and Conquer
18 Divide and Conquer

19 Divide and Conquer

20 Divide and Conquer
21 Divide and Conquer
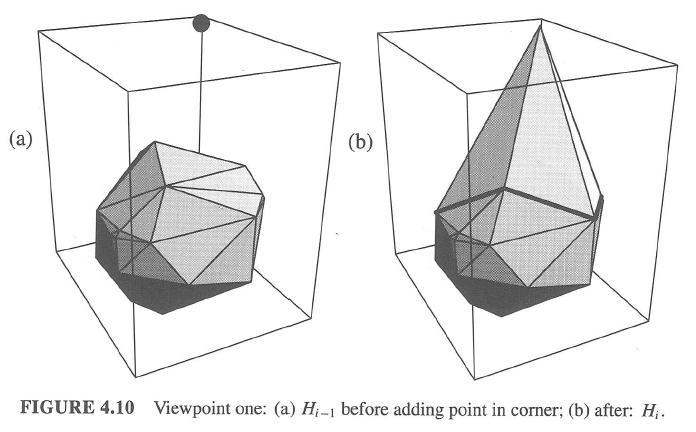
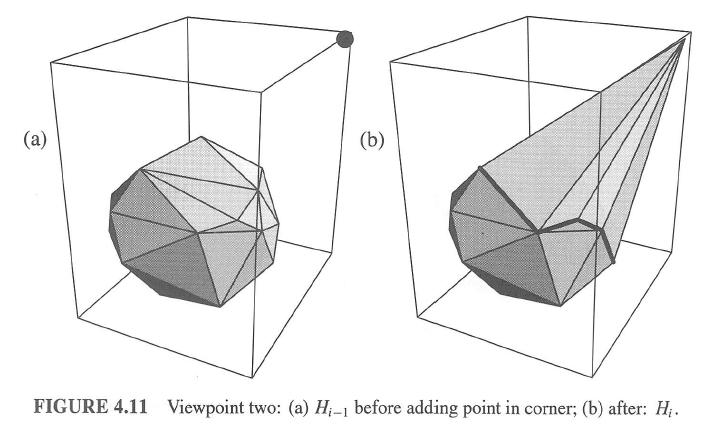
22 Incremental Algorithm 1.The overall structure of the threedimensional incremental algorithm is identical to that of the two-dimensional version 2.At the ith iteration, compute H i <- conv(h i-1 p i ) 3.Let p = p i and Q = H i-1 4.Two cases 1. If p Q, discard p 2. If not, compute the cone tangent to Q whose apex is p, and construct the new hull
23 Incremental Algorithm
24 Incremental Algorithm
25 Incremental Algorithm
26 Incremental Algorithm 1.Complexity Analysis 1. F = O(n) and E = O(n), where n is the number of vertices of the polytope 2. So the loops over faces and edges are linear 3. Since these loops are embedded inside a loop that iterates n times, the total complexity is quadratic: O(n 2 )
27 Convex Hulls in Three Dimensions Implementation of Incremental Algorithm
28 Data Structure 1.Assume the surface of our polytope is triangulated: Every face is a triangle 2.Structure Definitions 1. Three primary data types: vertices, edges, and faces 2. Doubly lined into a circular list 3. The ordering has no significance; so these lists should be thought more as sets than as lists 4. Vertex structure contains the coordinates of the vertex 5. It contains no pointer to its incident edges nor its incident faces 6. The edge structure contains pointers to the two vertices and two adjacent faces 7. The face structure contains pointers to the three vertices and to the three edges 3.See Code 4.1 and 4.2
29 Data Structure
30 Data Structure
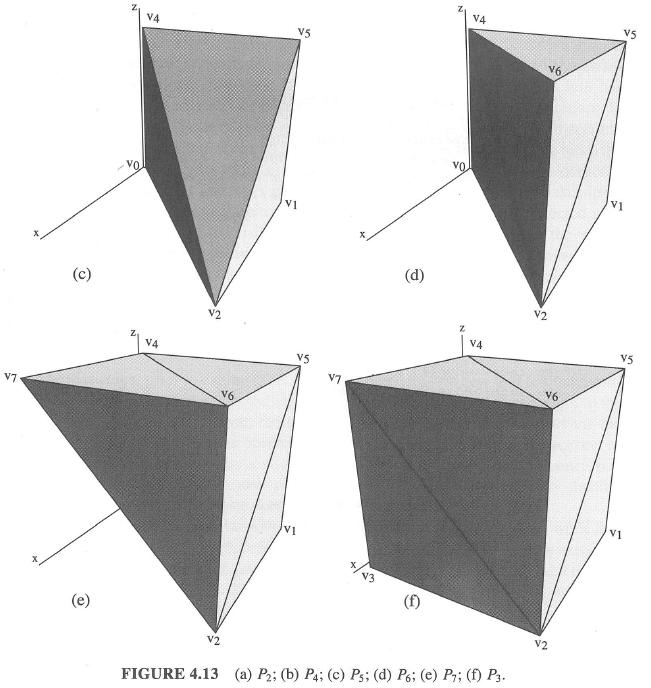
31 Data Structure 1.Example of Data Structure Polytope P 5 Consist of 9 edges and 6 faces The three lists in Tables are shown exactly as they are constructed by the code A view of the polytope is shown in Figure 4.12 Faces f 2, f 5, and f 6 are visible; f 0 is on the xyplane. The two black faces, f 3 and f 7 are coplanar, forming a square face of the cube, (v 0, v 1, v 5, v 4 )

32 Data Structure
33 Data Structure
34 Data Structure
35 Data Structure 1. An important property of the face data structure that is maintained at all times is that the vertices in field vertex are ordered counterclockwise, so that the right-hand rule yields a vector normal to the face pointing exterior to the polytope Thus, f 6 s vertices occur in the order (v 4, v 2, v 5 ) 2.The same counterclockwise ordering is maintained for the edge field Thus, the ordering of f 6 s edges is (e 4, e 6, e 8 )
36 Data Structure 1.Head Pointers At all times a global head pointer is maintained to each of the three lists, initialized to NULL 2. See Code 4.3
37 Data Structure 1.Basic List Processing Four basic list processing routines for each of the three data structures: 1.Allocation of a new element (NEW) 2.Freeing an element s memory (FREE) 3.Adding a new element to the list (ADD) 4.And deleting an old element (DELETE)
38 Data Structure
39 Data Structure
40 Data Structure
41
42 Example: Cube 1.Main 2.The work is separated into four sections at the top level (Code 4.8): read, create initial polytope, construct the hull, and print 3.Code 4.9 shows a list of which routine calls which, with a comment number indicating the order in which they are discussed
43 Example: Cube
44 Example: Cube
45 Example: Cube 1.ReadVertices 2.The input file for the cube example is: They are read in and formed into the vertex list with the straightforward procedures ReadVertices (Code 4.10) and MakeNullVertex (Code 4.7)
46 Example: Cube
47 Example: Cube 1.DoubleTriangle To create the initial polytope It is natural to start with a tetrahedron But, use a doubly covered triangle A polyhedron with three vertices and two faces identical except in the order of their vertices The task is not trivial First, it is not adequate to use simply the first three points as those points might be collinear Find three noncollinear points Second, the counterclockwise ordering of the vertices in each face record must be ensured.
48 Example: Cube
49
50 Example: Cube
51 Example: Cube 1.Face construction Each face is created by an ad hoc routine MakeFace, which takes three vertex pointers as input and one face pointer fold (Code 4.13) If the face pointer fold is not NULL, it uses it to access the edge pointers The goal is to fill the face record with three vertex pointers in the order passed, and with three edge pointers, either constructed de novo (for the first triangle) or copied from fold (for the second triangle), and finally to link the adjface fields of each edge
52
53 Example: Cube 1.ConstructHull 1.See Code It is called by main after the initial polytope is constructed 3.Simply adds each point one at a time with the function AddOne 4. v->mark to avoid points already processed 5.After each point is added to the previous hull, an important routine CleanUp is called 6.This deletes superfluous parts of the data structure
54 Example: Cube
55 Example: Cube 1.AddOne 1.The primary work is done here (Code 4.15) 2.Adds a single point p to the hull, constructing the new cone of faces if p is exterior 3.Two steps to this procedure 1. Determine which faces of the previously constructed hull are visible to p. If no face is visible from p, then p must lie inside the hull and it is marked for subsequent deletion 2. Add a cone of faces to p. Two adjacent faces are both marked visible are known to be interior to the visible region. Edges with just one adjacent visible face are known to be on the border of the visible region. Constructing this new face is handled by MakeConeFace
56
57
58 Example: Cube 1.AddOne: Cube Example 1.The first three vertices by DoubleTriangle: v 0, v 1, v 2 2.As discussed, the head pointer is moved to v 4 3.The vertices are then added in the order v 4, v 5, v 6, v 7, v 3 4.Let P i be the polytope after adding vertex v i 5.The polytopes are then produced in the order P 2, P 4, P 5, P 6, P 7, and P 3 6. Figure 4.13
59
60
61 Example: Cube 1.MakeConeFace 1.See Code The routine takes an edge e and a point p as input and creates a new face spanned by e and p and two new edges between p and the endpoints of e. 3.A pointer to the face is returned, and the created structures are linked together properly 4.This is mostly straightforward, but there are two complications
62 Code 4.17
63 Example: Cube 1.MakeConeFace 1. Two complications 2.First, the creation of duplicate edges must be avoided 2.Second, complication in MakeConeFace is the need to arrange the array elements in the vertex field of f in counterclockwise order
64
65 Example: Cube 1.CleanUp 1.The purpose of CleanUp is to clean up the three data structures to represent the new hull exactly and only, thereby preparing the structures for the next iteration 2.We partition the work into three natural groups: cleaning up the vertex, the edge, and the face lists 3.See Code The order in which the three are processed is important
66
67
68
69 Code 4.22
70 Code 4.22 (con t)
71 Checks 1. Face orientations: Check that the endpoints of each edge occur in opposite orders in the two faces adjacent to that edge 2. Convexity: Check that each face of the hull forms a nonnegative volume with each vertex of the hull 3. Euler s relations: Check that F = 2V 4 (Equation 4.5) and 2E = 3V
72
73
74
75 Volume Overflow 1.Computing the volume with integer arithmetic is not guaranteed to give the correct result, due to the possibility of overflow 2.When a computation exceeds the possible range, the C program proceeds without a complaint 3.(unlike division by zero, integer overflow is not detected and reported back to the C program) 4.This does not affect many programs, because the numbers used never become very large
76 Volume Overflow 1.But, our critical volume computation multiplies three coordinates together. 2.See fully expanded determinant in Equation 4.6:
77 Volume Overflow 1.Let us explore the safe range of this computation 2.This is not an easy question to anwser 3.The smallest example on which I could make the computation err uses coordinates of only ±512 4.The idea behind this example is that a regular tetrahedron maximizes its volume among all tetrahedra with fixed maximum edge length 5.So start with the regular tetrahedron T defined by (1,1,1),(1,-1,-1),(-1,1,-1), and (-1,-1,1), which is formed by four vertices of a cube centered on the origin.
78 Volume Overflow 1. Scaled by a constant c, the volume of this tetrahedron is 16c 3. with c = 2 9 = 512, the volume is 2 3(9)+4 = 2 31 thus 2. However, evaluating Equation (4.8) results in the value = Fortunately there is a way to extend the safe range of the computation on contemporary machines without much additional effort 4. Most machines allocate doubles 64bits, over 50 of which are used for the mantissa. 5. So, integer calculations can be performed more accurately with floating-point numbers.
79 Volume Overflow 1.Several coping strategies: 1. Report arithmetic overflow. 1. This does not extend the range of the code, but at least the user will know when it fails 2. Use higher precision arithmetic 1. Machines are now offering 64-bit integer computations 3. Use bignums 1. LISP and Mathematica use arbitrary precision arithmetic, often called bignums 4. Incorporate special determinant code
80 Volume Overflow 1.The VolumeSign code needs to be made: It returns only the sign of the volume, not the volume itself for the visibility tests 2.It make sense to use an AreaSign function paralleling the VolumeSign function 3.Code 4.23 is used throughout the code distributed with this book wherever only the sign of the area is needed 4.Note how integers are forced to doubles so that the multiplication has more bits available to it
81 Volume Overflow
Week 7 Convex Hulls in 3D
 1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
1. CONVEX POLYGONS. Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D.
 1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
Flavor of Computational Geometry. Convex Hull in 2D. Shireen Y. Elhabian Aly A. Farag University of Louisville
 Flavor of Computational Geometry Convex Hull in 2D Shireen Y. Elhabian Aly A. Farag University of Louisville February 2010 Agenda Introduction Definitions of Convexity and Convex Hulls Naïve Algorithms
Flavor of Computational Geometry Convex Hull in 2D Shireen Y. Elhabian Aly A. Farag University of Louisville February 2010 Agenda Introduction Definitions of Convexity and Convex Hulls Naïve Algorithms
3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College
![3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College](/thumbs/75/72944672.jpg "3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College") 3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull in 3D The problem: Given a set P of points in 3D, compute their convex hull convex polyhedron 2D 3D polygon
3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull in 3D The problem: Given a set P of points in 3D, compute their convex hull convex polyhedron 2D 3D polygon
Geometric Algorithms in Three Dimensions Tutorial. FSP Seminar, Strobl,
 Geometric Algorithms in Three Dimensions Tutorial FSP Seminar, Strobl, 22.06.2006 Why Algorithms in Three and Higher Dimensions Which algorithms (convex hulls, triangulations etc.) can be generalized to
Geometric Algorithms in Three Dimensions Tutorial FSP Seminar, Strobl, 22.06.2006 Why Algorithms in Three and Higher Dimensions Which algorithms (convex hulls, triangulations etc.) can be generalized to
We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance.
 Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
Question. Why is the third shape not convex?
 1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
Convex Hulls (3D) O Rourke, Chapter 4
 O Rourke, Chapter 4") Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Math 366 Lecture Notes Section 11.4 Geometry in Three Dimensions
 Math 366 Lecture Notes Section 11.4 Geometry in Three Dimensions Simple Closed Surfaces A simple closed surface has exactly one interior, no holes, and is hollow. A sphere is the set of all points at a
Math 366 Lecture Notes Section 11.4 Geometry in Three Dimensions Simple Closed Surfaces A simple closed surface has exactly one interior, no holes, and is hollow. A sphere is the set of all points at a
3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College
![3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College](/thumbs/90/102029124.jpg "3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College") 3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hulls The problem: Given a set P of points, compute their convex hull 2D 3D 2D 3D polygon polyhedron Polyhedron region
3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hulls The problem: Given a set P of points, compute their convex hull 2D 3D 2D 3D polygon polyhedron Polyhedron region
Planar Graphs. 1 Graphs and maps. 1.1 Planarity and duality
 Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Chapter 4 Concepts from Geometry
 Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Pebble Sets in Convex Polygons
 2 1 Pebble Sets in Convex Polygons Kevin Iga, Randall Maddox June 15, 2005 Abstract Lukács and András posed the problem of showing the existence of a set of n 2 points in the interior of a convex n-gon
2 1 Pebble Sets in Convex Polygons Kevin Iga, Randall Maddox June 15, 2005 Abstract Lukács and András posed the problem of showing the existence of a set of n 2 points in the interior of a convex n-gon
Lecture 3 (CGAL) Panos Giannopoulos, Dror Atariah AG TI WS 2012/13
 Panos Giannopoulos, Dror Atariah AG TI WS 2012/13") Lecture 3 (CGAL) Panos Giannopoulos Dror Atariah AG TI WS 2012/13 Exercises? Outline Convex Hull in 3d Polyhedra and the Half Edge (or DCEL) data structure Exercise 3 3 stated above each λi is non-negative
Lecture 3 (CGAL) Panos Giannopoulos Dror Atariah AG TI WS 2012/13 Exercises? Outline Convex Hull in 3d Polyhedra and the Half Edge (or DCEL) data structure Exercise 3 3 stated above each λi is non-negative
ACTUALLY DOING IT : an Introduction to Polyhedral Computation
 ACTUALLY DOING IT : an Introduction to Polyhedral Computation Jesús A. De Loera Department of Mathematics Univ. of California, Davis http://www.math.ucdavis.edu/ deloera/ 1 What is a Convex Polytope? 2
ACTUALLY DOING IT : an Introduction to Polyhedral Computation Jesús A. De Loera Department of Mathematics Univ. of California, Davis http://www.math.ucdavis.edu/ deloera/ 1 What is a Convex Polytope? 2
Ma/CS 6b Class 9: Euler s Formula
 Ma/CS 6b Class 9: Euler s Formula By Adam Sheffer Recall: Plane Graphs A plane graph is a drawing of a graph in the plane such that the edges are noncrossing curves. 1 Recall: Planar Graphs The drawing
Ma/CS 6b Class 9: Euler s Formula By Adam Sheffer Recall: Plane Graphs A plane graph is a drawing of a graph in the plane such that the edges are noncrossing curves. 1 Recall: Planar Graphs The drawing
INTRODUCTION TO GRAPH THEORY. 1. Definitions
 INTRODUCTION TO GRAPH THEORY D. JAKOBSON 1. Definitions A graph G consists of vertices {v 1, v 2,..., v n } and edges {e 1, e 2,..., e m } connecting pairs of vertices. An edge e = (uv) is incident with
INTRODUCTION TO GRAPH THEORY D. JAKOBSON 1. Definitions A graph G consists of vertices {v 1, v 2,..., v n } and edges {e 1, e 2,..., e m } connecting pairs of vertices. An edge e = (uv) is incident with
CS 532: 3D Computer Vision 14 th Set of Notes
 1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
Voronoi diagram and Delaunay triangulation
 Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
Geometry Vocabulary Math Fundamentals Reference Sheet Page 1
 Math Fundamentals Reference Sheet Page 1 Acute Angle An angle whose measure is between 0 and 90 Acute Triangle A that has all acute Adjacent Alternate Interior Angle Two coplanar with a common vertex and
Math Fundamentals Reference Sheet Page 1 Acute Angle An angle whose measure is between 0 and 90 Acute Triangle A that has all acute Adjacent Alternate Interior Angle Two coplanar with a common vertex and
Polygon Triangulation
 Polygon Triangulation Definition Simple Polygons 1. A polygon is the region of a plane bounded by a finite collection of line segments forming a simple closed curve. 2. Simple closed curve means a certain
Polygon Triangulation Definition Simple Polygons 1. A polygon is the region of a plane bounded by a finite collection of line segments forming a simple closed curve. 2. Simple closed curve means a certain
1 The Platonic Solids
 1 The We take the celebration of Dodecahedron Day as an opportunity embark on a discussion of perhaps the best-known and most celebrated of all polyhedra the Platonic solids. Before doing so, however,
1 The We take the celebration of Dodecahedron Day as an opportunity embark on a discussion of perhaps the best-known and most celebrated of all polyhedra the Platonic solids. Before doing so, however,
Three applications of Euler s formula. Chapter 10
 Three applications of Euler s formula Chapter 10 A graph is planar if it can be drawn in the plane R without crossing edges (or, equivalently, on the -dimensional sphere S ). We talk of a plane graph if
Three applications of Euler s formula Chapter 10 A graph is planar if it can be drawn in the plane R without crossing edges (or, equivalently, on the -dimensional sphere S ). We talk of a plane graph if
Glossary of dictionary terms in the AP geometry units
 Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Line Arrangement. Chapter 6
 Line Arrangement Chapter 6 Line Arrangement Problem: Given a set L of n lines in the plane, compute their arrangement which is a planar subdivision. Line Arrangements Problem: Given a set L of n lines
Line Arrangement Chapter 6 Line Arrangement Problem: Given a set L of n lines in the plane, compute their arrangement which is a planar subdivision. Line Arrangements Problem: Given a set L of n lines
The radius for a regular polygon is the same as the radius of the circumscribed circle.
 Perimeter and Area The perimeter and area of geometric shapes are basic properties that we need to know. The more complex a shape is, the more complex the process can be in finding its perimeter and area.
Perimeter and Area The perimeter and area of geometric shapes are basic properties that we need to know. The more complex a shape is, the more complex the process can be in finding its perimeter and area.
Computational Geometry
 Casting a polyhedron CAD/CAM systems CAD/CAM systems allow you to design objects and test how they can be constructed Many objects are constructed used a mold Casting Casting A general question: Given
Casting a polyhedron CAD/CAM systems CAD/CAM systems allow you to design objects and test how they can be constructed Many objects are constructed used a mold Casting Casting A general question: Given
1 Appendix to notes 2, on Hyperbolic geometry:
 1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
Example: The following is an example of a polyhedron. Fill the blanks with the appropriate answer. Vertices:
 11.1: Space Figures and Cross Sections Polyhedron: solid that is bounded by polygons Faces: polygons that enclose a polyhedron Edge: line segment that faces meet and form Vertex: point or corner where
11.1: Space Figures and Cross Sections Polyhedron: solid that is bounded by polygons Faces: polygons that enclose a polyhedron Edge: line segment that faces meet and form Vertex: point or corner where
Intersection of an Oriented Box and a Cone
 Intersection of an Oriented Box and a Cone David Eberly, Geometric Tools, Redmond WA 98052 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International
Intersection of an Oriented Box and a Cone David Eberly, Geometric Tools, Redmond WA 98052 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International
Computational Geometry
 Lecture 1: Introduction and convex hulls Geometry: points, lines,... Geometric objects Geometric relations Combinatorial complexity Computational geometry Plane (two-dimensional), R 2 Space (three-dimensional),
Lecture 1: Introduction and convex hulls Geometry: points, lines,... Geometric objects Geometric relations Combinatorial complexity Computational geometry Plane (two-dimensional), R 2 Space (three-dimensional),
Answer Key: Three-Dimensional Cross Sections
 Geometry A Unit Answer Key: Three-Dimensional Cross Sections Name Date Objectives In this lesson, you will: visualize three-dimensional objects from different perspectives be able to create a projection
Geometry A Unit Answer Key: Three-Dimensional Cross Sections Name Date Objectives In this lesson, you will: visualize three-dimensional objects from different perspectives be able to create a projection
Euler Characteristic
 Euler Characteristic Rebecca Robinson May 15, 2007 Euler Characteristic Rebecca Robinson 1 PLANAR GRAPHS 1 Planar graphs v = 5, e = 4, f = 1 v e + f = 2 v = 6, e = 7, f = 3 v = 4, e = 6, f = 4 v e + f
Euler Characteristic Rebecca Robinson May 15, 2007 Euler Characteristic Rebecca Robinson 1 PLANAR GRAPHS 1 Planar graphs v = 5, e = 4, f = 1 v e + f = 2 v = 6, e = 7, f = 3 v = 4, e = 6, f = 4 v e + f
Week 9: Planar and non-planar graphs. 7 and 9 November, 2018
 (1/27) MA284 : Discrete Mathematics Week 9: Planar and non-planar graphs http://www.maths.nuigalway.ie/ niall/ma284/ 7 and 9 November, 2018 1 Planar graphs and Euler s formula 2 Non-planar graphs K 5 K
(1/27) MA284 : Discrete Mathematics Week 9: Planar and non-planar graphs http://www.maths.nuigalway.ie/ niall/ma284/ 7 and 9 November, 2018 1 Planar graphs and Euler s formula 2 Non-planar graphs K 5 K
Brief History. Graph Theory. What is a graph? Types of graphs Directed graph: a graph that has edges with specific directions
 Brief History Graph Theory What is a graph? It all began in 1736 when Leonhard Euler gave a proof that not all seven bridges over the Pregolya River could all be walked over once and end up where you started.
Brief History Graph Theory What is a graph? It all began in 1736 when Leonhard Euler gave a proof that not all seven bridges over the Pregolya River could all be walked over once and end up where you started.
Lecture 3. Corner Polyhedron, Intersection Cuts, Maximal Lattice-Free Convex Sets. Tepper School of Business Carnegie Mellon University, Pittsburgh
 Lecture 3 Corner Polyhedron, Intersection Cuts, Maximal Lattice-Free Convex Sets Gérard Cornuéjols Tepper School of Business Carnegie Mellon University, Pittsburgh January 2016 Mixed Integer Linear Programming
Lecture 3 Corner Polyhedron, Intersection Cuts, Maximal Lattice-Free Convex Sets Gérard Cornuéjols Tepper School of Business Carnegie Mellon University, Pittsburgh January 2016 Mixed Integer Linear Programming
25. How would you make the octahedral die shown below?
 304450_ch_08_enqxd 12/6/06 1:39 PM Page 577 Chapter Summary 577 draw others you will not necessarily need all of them. Describe your method, other than random trial and error. How confident are you that
304450_ch_08_enqxd 12/6/06 1:39 PM Page 577 Chapter Summary 577 draw others you will not necessarily need all of them. Describe your method, other than random trial and error. How confident are you that
Non-extendible finite polycycles
 Izvestiya: Mathematics 70:3 1 18 Izvestiya RAN : Ser. Mat. 70:3 3 22 c 2006 RAS(DoM) and LMS DOI 10.1070/IM2006v170n01ABEH002301 Non-extendible finite polycycles M. Deza, S. V. Shpectorov, M. I. Shtogrin
Izvestiya: Mathematics 70:3 1 18 Izvestiya RAN : Ser. Mat. 70:3 3 22 c 2006 RAS(DoM) and LMS DOI 10.1070/IM2006v170n01ABEH002301 Non-extendible finite polycycles M. Deza, S. V. Shpectorov, M. I. Shtogrin
Voronoi Diagrams and Delaunay Triangulations. O Rourke, Chapter 5
 Voronoi Diagrams and Delaunay Triangulations O Rourke, Chapter 5 Outline Preliminaries Properties and Applications Computing the Delaunay Triangulation Preliminaries Given a function f: R 2 R, the tangent
Voronoi Diagrams and Delaunay Triangulations O Rourke, Chapter 5 Outline Preliminaries Properties and Applications Computing the Delaunay Triangulation Preliminaries Given a function f: R 2 R, the tangent
Monotone Paths in Geometric Triangulations
 Monotone Paths in Geometric Triangulations Adrian Dumitrescu Ritankar Mandal Csaba D. Tóth November 19, 2017 Abstract (I) We prove that the (maximum) number of monotone paths in a geometric triangulation
Monotone Paths in Geometric Triangulations Adrian Dumitrescu Ritankar Mandal Csaba D. Tóth November 19, 2017 Abstract (I) We prove that the (maximum) number of monotone paths in a geometric triangulation
Geometry Reasons for Proofs Chapter 1
 Geometry Reasons for Proofs Chapter 1 Lesson 1.1 Defined Terms: Undefined Terms: Point: Line: Plane: Space: Postulate 1: Postulate : terms that are explained using undefined and/or other defined terms
Geometry Reasons for Proofs Chapter 1 Lesson 1.1 Defined Terms: Undefined Terms: Point: Line: Plane: Space: Postulate 1: Postulate : terms that are explained using undefined and/or other defined terms
Course Number: Course Title: Geometry
 Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Figure 2.1: An example of a convex set and a nonconvex one.
 Convex Hulls 2.1 Definitions 2 Convexity is the key to understanding and simplifying geometry, and the convex hull plays a role in geometry akin to the sorted order for a collection of numbers. So what
Convex Hulls 2.1 Definitions 2 Convexity is the key to understanding and simplifying geometry, and the convex hull plays a role in geometry akin to the sorted order for a collection of numbers. So what
Indiana State Math Contest Geometry
 Indiana State Math Contest 018 Geometry This test was prepared by faculty at Indiana University - Purdue University Columbus Do not open this test booklet until you have been advised to do so by the test
Indiana State Math Contest 018 Geometry This test was prepared by faculty at Indiana University - Purdue University Columbus Do not open this test booklet until you have been advised to do so by the test
Henneberg construction
 Henneberg construction Seminar über Algorithmen FU-Berlin, WS 2007/08 Andrei Haralevich Abstract: In this work will be explained two different types of steps of Henneberg construction. And how Henneberg
Henneberg construction Seminar über Algorithmen FU-Berlin, WS 2007/08 Andrei Haralevich Abstract: In this work will be explained two different types of steps of Henneberg construction. And how Henneberg
Line segment intersection. Family of intersection problems
 CG Lecture 2 Line segment intersection Intersecting two line segments Line sweep algorithm Convex polygon intersection Boolean operations on polygons Subdivision overlay algorithm 1 Family of intersection
CG Lecture 2 Line segment intersection Intersecting two line segments Line sweep algorithm Convex polygon intersection Boolean operations on polygons Subdivision overlay algorithm 1 Family of intersection
A Study of the Rigidity of Regular Polytopes
 A Study of the Rigidity of Regular Polytopes A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School of The Ohio State University By Helene
A Study of the Rigidity of Regular Polytopes A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School of The Ohio State University By Helene
Zipper Unfoldings of Polyhedral Complexes
 Zipper Unfoldings of Polyhedral Complexes Erik D. Demaine Martin L. Demaine Anna Lubiw Arlo Shallit Jonah L. Shallit Abstract We explore which polyhedra and polyhedral complexes can be formed by folding
Zipper Unfoldings of Polyhedral Complexes Erik D. Demaine Martin L. Demaine Anna Lubiw Arlo Shallit Jonah L. Shallit Abstract We explore which polyhedra and polyhedral complexes can be formed by folding
3.D. The Platonic solids
 3.D. The Platonic solids The purpose of this addendum to the course notes is to provide more information about regular solid figures, which played an important role in Greek mathematics and philosophy.
3.D. The Platonic solids The purpose of this addendum to the course notes is to provide more information about regular solid figures, which played an important role in Greek mathematics and philosophy.
Chapter 12 and 11.1 Planar graphs, regular polyhedra, and graph colorings
 Chapter 12 and 11.1 Planar graphs, regular polyhedra, and graph colorings Prof. Tesler Math 184A Fall 2017 Prof. Tesler Ch. 12: Planar Graphs Math 184A / Fall 2017 1 / 45 12.1 12.2. Planar graphs Definition
Chapter 12 and 11.1 Planar graphs, regular polyhedra, and graph colorings Prof. Tesler Math 184A Fall 2017 Prof. Tesler Ch. 12: Planar Graphs Math 184A / Fall 2017 1 / 45 12.1 12.2. Planar graphs Definition
CS 372: Computational Geometry Lecture 10 Linear Programming in Fixed Dimension
 CS 372: Computational Geometry Lecture 10 Linear Programming in Fixed Dimension Antoine Vigneron King Abdullah University of Science and Technology November 7, 2012 Antoine Vigneron (KAUST) CS 372 Lecture
CS 372: Computational Geometry Lecture 10 Linear Programming in Fixed Dimension Antoine Vigneron King Abdullah University of Science and Technology November 7, 2012 Antoine Vigneron (KAUST) CS 372 Lecture
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces
 MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
CS 177 Homework 1. Julian Panetta. October 22, We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F:
 CS 177 Homework 1 Julian Panetta October, 009 1 Euler Characteristic 1.1 Polyhedral Formula We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F: V E + F = 1 First,
CS 177 Homework 1 Julian Panetta October, 009 1 Euler Characteristic 1.1 Polyhedral Formula We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F: V E + F = 1 First,
Section 9.4. Volume and Surface Area. Copyright 2013, 2010, 2007, Pearson, Education, Inc.
 Section 9.4 Volume and Surface Area What You Will Learn Volume Surface Area 9.4-2 Volume Volume is the measure of the capacity of a three-dimensional figure. It is the amount of material you can put inside
Section 9.4 Volume and Surface Area What You Will Learn Volume Surface Area 9.4-2 Volume Volume is the measure of the capacity of a three-dimensional figure. It is the amount of material you can put inside
EULER S FORMULA AND THE FIVE COLOR THEOREM
 EULER S FORMULA AND THE FIVE COLOR THEOREM MIN JAE SONG Abstract. In this paper, we will define the necessary concepts to formulate map coloring problems. Then, we will prove Euler s formula and apply
EULER S FORMULA AND THE FIVE COLOR THEOREM MIN JAE SONG Abstract. In this paper, we will define the necessary concepts to formulate map coloring problems. Then, we will prove Euler s formula and apply
Math 414 Lecture 2 Everyone have a laptop?
 Math 44 Lecture 2 Everyone have a laptop? THEOREM. Let v,...,v k be k vectors in an n-dimensional space and A = [v ;...; v k ] v,..., v k independent v,..., v k span the space v,..., v k a basis v,...,
Math 44 Lecture 2 Everyone have a laptop? THEOREM. Let v,...,v k be k vectors in an n-dimensional space and A = [v ;...; v k ] v,..., v k independent v,..., v k span the space v,..., v k a basis v,...,
Jordan Curves. A curve is a subset of IR 2 of the form
 Jordan Curves A curve is a subset of IR 2 of the form α = {γ(x) : x [0,1]}, where γ : [0,1] IR 2 is a continuous mapping from the closed interval [0,1] to the plane. γ(0) and γ(1) are called the endpoints
Jordan Curves A curve is a subset of IR 2 of the form α = {γ(x) : x [0,1]}, where γ : [0,1] IR 2 is a continuous mapping from the closed interval [0,1] to the plane. γ(0) and γ(1) are called the endpoints
The Gift Wrapping Method in PHCpack
 The Gift Wrapping Method in PHCpack Jan Verschelde University of Illinois at Chicago Department of Mathematics, Statistics, and Computer Science http://www.math.uic.edu/ jan jan@math.uic.edu Graduate Computational
The Gift Wrapping Method in PHCpack Jan Verschelde University of Illinois at Chicago Department of Mathematics, Statistics, and Computer Science http://www.math.uic.edu/ jan jan@math.uic.edu Graduate Computational
Euler's formula and Platonic solids
 University of Washington Euler's formula and Platonic solids Name: David Clark, Kelsey Kyllo, Kurt Maugerle, Yue Yuan Zhang Course Number: Math 445 Professor: Julia Pevtsova Date: 2013/06/03 Table of Contents:
University of Washington Euler's formula and Platonic solids Name: David Clark, Kelsey Kyllo, Kurt Maugerle, Yue Yuan Zhang Course Number: Math 445 Professor: Julia Pevtsova Date: 2013/06/03 Table of Contents:
1 Definition of Reduction
 1 Definition of Reduction Problem A is reducible, or more technically Turing reducible, to problem B, denoted A B if there a main program M to solve problem A that lacks only a procedure to solve problem
1 Definition of Reduction Problem A is reducible, or more technically Turing reducible, to problem B, denoted A B if there a main program M to solve problem A that lacks only a procedure to solve problem
My Favorite Problems, 4 Harold B. Reiter University of North Carolina Charlotte
 My Favorite Problems, 4 Harold B Reiter University of North Carolina Charlotte This is the fourth of a series of columns about problems I am soliciting problems from the readers of M&I Quarterly I m looking
My Favorite Problems, 4 Harold B Reiter University of North Carolina Charlotte This is the fourth of a series of columns about problems I am soliciting problems from the readers of M&I Quarterly I m looking
Curvature Berkeley Math Circle January 08, 2013
 Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
Week 9: Planar and non-planar graphs. 1st and 3rd of November, 2017
 (1/26) MA284 : Discrete Mathematics Week 9: Planar and non-planar graphs http://www.maths.nuigalway.ie/~niall/ma284/ 1st and 3rd of November, 2017 1 Recall... planar graphs and Euler s formula 2 Non-planar
(1/26) MA284 : Discrete Mathematics Week 9: Planar and non-planar graphs http://www.maths.nuigalway.ie/~niall/ma284/ 1st and 3rd of November, 2017 1 Recall... planar graphs and Euler s formula 2 Non-planar
Polygon decomposition. Motivation: Art gallery problem
 CG Lecture 3 Polygon decomposition 1. Polygon triangulation Triangulation theory Monotone polygon triangulation 2. Polygon decomposition into monotone pieces 3. Trapezoidal decomposition 4. Convex decomposition
CG Lecture 3 Polygon decomposition 1. Polygon triangulation Triangulation theory Monotone polygon triangulation 2. Polygon decomposition into monotone pieces 3. Trapezoidal decomposition 4. Convex decomposition
Tangencies between disjoint regions in the plane
 June 16, 20 Problem Definition Two nonoverlapping Jordan regions in the plane are said to touch each other or to be tangent to each other if their boundaries have precisely one point in common and their
June 16, 20 Problem Definition Two nonoverlapping Jordan regions in the plane are said to touch each other or to be tangent to each other if their boundaries have precisely one point in common and their
Optimal Compression of a Polyline with Segments and Arcs
 Optimal Compression of a Polyline with Segments and Arcs Alexander Gribov Esri 380 New York Street Redlands, CA 92373 Email: agribov@esri.com arxiv:1604.07476v5 [cs.cg] 10 Apr 2017 Abstract This paper
Optimal Compression of a Polyline with Segments and Arcs Alexander Gribov Esri 380 New York Street Redlands, CA 92373 Email: agribov@esri.com arxiv:1604.07476v5 [cs.cg] 10 Apr 2017 Abstract This paper
ECE Su09; Dr. Farag
 ECE 600: Introduction to Shape Analysis Lab #5 Convex Hull in 3D (Assigned Thursday 6/18/09 Due Thursday 6/25/09) In this lab, we will discuss the details of computing convex hull in 3D using Incremental
ECE 600: Introduction to Shape Analysis Lab #5 Convex Hull in 3D (Assigned Thursday 6/18/09 Due Thursday 6/25/09) In this lab, we will discuss the details of computing convex hull in 3D using Incremental
Department: Course: Chapter 1
 Department: Course: 2016-2017 Term, Phrase, or Expression Simple Definition Chapter 1 Comprehension Support Point Line plane collinear coplanar A location in space. It does not have a size or shape The
Department: Course: 2016-2017 Term, Phrase, or Expression Simple Definition Chapter 1 Comprehension Support Point Line plane collinear coplanar A location in space. It does not have a size or shape The
Convex Polygon Generation
 Convex Polygon Generation critterai.org /projects/nmgen_study/polygen.html This page describes the forth stage in building a navigation mesh, the generation of convex polygons from the simple polygons
Convex Polygon Generation critterai.org /projects/nmgen_study/polygen.html This page describes the forth stage in building a navigation mesh, the generation of convex polygons from the simple polygons
Math 210 Manifold III, Spring 2018 Euler Characteristics of Surfaces Hirotaka Tamanoi
 Math 210 Manifold III, Spring 2018 Euler Characteristics of Surfaces Hirotaka Tamanoi 1. Euler Characteristic of Surfaces Leonhard Euler noticed that the number v of vertices, the number e of edges and
Math 210 Manifold III, Spring 2018 Euler Characteristics of Surfaces Hirotaka Tamanoi 1. Euler Characteristic of Surfaces Leonhard Euler noticed that the number v of vertices, the number e of edges and
On-Line Computer Graphics Notes CLIPPING
 On-Line Computer Graphics Notes CLIPPING Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University of California, Davis 1 Overview The primary use of clipping in
On-Line Computer Graphics Notes CLIPPING Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University of California, Davis 1 Overview The primary use of clipping in
CSE 5311 Notes 13: Computational Geometry
 CSE 5311 Notes 13: Computational Geometry (Last updated 4/17/17 4:39 PM) SMALLEST ENCLOSING DISK See section 4.7 of de Berg ( http://dx.doi.org.ezproxy.uta.edu/10.1007/978-3-540-77974-2 ) Algorithm MINIDISC(P)
CSE 5311 Notes 13: Computational Geometry (Last updated 4/17/17 4:39 PM) SMALLEST ENCLOSING DISK See section 4.7 of de Berg ( http://dx.doi.org.ezproxy.uta.edu/10.1007/978-3-540-77974-2 ) Algorithm MINIDISC(P)
Intersection. Segment-Segment Intersection
 Intersection Segment-Segment Intersection Segment-Segment Intersection 1. For many application, the floating-point coordinates of the point of intersection are needed 2. We will need this to compute the
Intersection Segment-Segment Intersection Segment-Segment Intersection 1. For many application, the floating-point coordinates of the point of intersection are needed 2. We will need this to compute the
MATH 890 HOMEWORK 2 DAVID MEREDITH
 MATH 890 HOMEWORK 2 DAVID MEREDITH (1) Suppose P and Q are polyhedra. Then P Q is a polyhedron. Moreover if P and Q are polytopes then P Q is a polytope. The facets of P Q are either F Q where F is a facet
MATH 890 HOMEWORK 2 DAVID MEREDITH (1) Suppose P and Q are polyhedra. Then P Q is a polyhedron. Moreover if P and Q are polytopes then P Q is a polytope. The facets of P Q are either F Q where F is a facet
Preferred directions for resolving the non-uniqueness of Delaunay triangulations
 Preferred directions for resolving the non-uniqueness of Delaunay triangulations Christopher Dyken and Michael S. Floater Abstract: This note proposes a simple rule to determine a unique triangulation
Preferred directions for resolving the non-uniqueness of Delaunay triangulations Christopher Dyken and Michael S. Floater Abstract: This note proposes a simple rule to determine a unique triangulation
Mathematics Curriculum
 6 G R A D E Mathematics Curriculum GRADE 6 5 Table of Contents 1... 1 Topic A: Area of Triangles, Quadrilaterals, and Polygons (6.G.A.1)... 11 Lesson 1: The Area of Parallelograms Through Rectangle Facts...
6 G R A D E Mathematics Curriculum GRADE 6 5 Table of Contents 1... 1 Topic A: Area of Triangles, Quadrilaterals, and Polygons (6.G.A.1)... 11 Lesson 1: The Area of Parallelograms Through Rectangle Facts...
Discrete Mathematics I So Practice Sheet Solutions 1
 Discrete Mathematics I So 2016 Tibor Szabó Shagnik Das Practice Sheet Solutions 1 Provided below are possible solutions to the questions from the practice sheet issued towards the end of the course. Exercise
Discrete Mathematics I So 2016 Tibor Szabó Shagnik Das Practice Sheet Solutions 1 Provided below are possible solutions to the questions from the practice sheet issued towards the end of the course. Exercise
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS
 GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
COMPUTATIONAL GEOMETRY
 Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
The Geometry of Carpentry and Joinery
 The Geometry of Carpentry and Joinery Pat Morin and Jason Morrison School of Computer Science, Carleton University, 115 Colonel By Drive Ottawa, Ontario, CANADA K1S 5B6 Abstract In this paper we propose
The Geometry of Carpentry and Joinery Pat Morin and Jason Morrison School of Computer Science, Carleton University, 115 Colonel By Drive Ottawa, Ontario, CANADA K1S 5B6 Abstract In this paper we propose
Line Arrangements. Applications
 Computational Geometry Chapter 9 Line Arrangements 1 Line Arrangements Applications On the Agenda 2 1 Complexity of a Line Arrangement Given a set L of n lines in the plane, their arrangement A(L) is the
Computational Geometry Chapter 9 Line Arrangements 1 Line Arrangements Applications On the Agenda 2 1 Complexity of a Line Arrangement Given a set L of n lines in the plane, their arrangement A(L) is the
Section 1-1 Points, Lines, and Planes
 Section 1-1 Points, Lines, and Planes I CAN. Identify and model points, lines, and planes. Identify collinear and coplanar points and intersecting lines and planes in space. Undefined Term- Words, usually
Section 1-1 Points, Lines, and Planes I CAN. Identify and model points, lines, and planes. Identify collinear and coplanar points and intersecting lines and planes in space. Undefined Term- Words, usually
Jordan Curves. A curve is a subset of IR 2 of the form
 Jordan Curves A curve is a subset of IR 2 of the form α = {γ(x) : x [0, 1]}, where γ : [0, 1] IR 2 is a continuous mapping from the closed interval [0, 1] to the plane. γ(0) and γ(1) are called the endpoints
Jordan Curves A curve is a subset of IR 2 of the form α = {γ(x) : x [0, 1]}, where γ : [0, 1] IR 2 is a continuous mapping from the closed interval [0, 1] to the plane. γ(0) and γ(1) are called the endpoints
Triangulations of hyperbolic 3-manifolds admitting strict angle structures
 Triangulations of hyperbolic 3-manifolds admitting strict angle structures Craig D. Hodgson, J. Hyam Rubinstein and Henry Segerman segerman@unimelb.edu.au University of Melbourne January 4 th 2012 Ideal
Triangulations of hyperbolic 3-manifolds admitting strict angle structures Craig D. Hodgson, J. Hyam Rubinstein and Henry Segerman segerman@unimelb.edu.au University of Melbourne January 4 th 2012 Ideal
Some Open Problems in Graph Theory and Computational Geometry
 Some Open Problems in Graph Theory and Computational Geometry David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science ICS 269, January 25, 2002 Two Models of Algorithms Research
Some Open Problems in Graph Theory and Computational Geometry David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science ICS 269, January 25, 2002 Two Models of Algorithms Research
On the maximum number of edges in plane graph with fixed exterior face degree
 On the maximum number of edges in plane graph with fixed exterior face degree arxiv:708.02024v [math.co] 7 Aug 207 Niran Abbas Ali a, Gek L. Chia b,e, Hazim Michman Trao c and Adem Kilicman d a,c,d Department
On the maximum number of edges in plane graph with fixed exterior face degree arxiv:708.02024v [math.co] 7 Aug 207 Niran Abbas Ali a, Gek L. Chia b,e, Hazim Michman Trao c and Adem Kilicman d a,c,d Department
COMP331/557. Chapter 2: The Geometry of Linear Programming. (Bertsimas & Tsitsiklis, Chapter 2)
") COMP331/557 Chapter 2: The Geometry of Linear Programming (Bertsimas & Tsitsiklis, Chapter 2) 49 Polyhedra and Polytopes Definition 2.1. Let A 2 R m n and b 2 R m. a set {x 2 R n A x b} is called polyhedron
COMP331/557 Chapter 2: The Geometry of Linear Programming (Bertsimas & Tsitsiklis, Chapter 2) 49 Polyhedra and Polytopes Definition 2.1. Let A 2 R m n and b 2 R m. a set {x 2 R n A x b} is called polyhedron
Suggested List of Mathematical Language. Geometry
 Suggested List of Mathematical Language Geometry Problem Solving A additive property of equality algorithm apply constraints construct discover explore generalization inductive reasoning parameters reason
Suggested List of Mathematical Language Geometry Problem Solving A additive property of equality algorithm apply constraints construct discover explore generalization inductive reasoning parameters reason
Grade VIII. Mathematics Geometry Notes. #GrowWithGreen
 Grade VIII Mathematics Geometry Notes #GrowWithGreen Polygons can be classified according to their number of sides (or vertices). The sum of all the interior angles of an n -sided polygon is given by,
Grade VIII Mathematics Geometry Notes #GrowWithGreen Polygons can be classified according to their number of sides (or vertices). The sum of all the interior angles of an n -sided polygon is given by,
A Topologically Convex Vertex-Ununfoldable Polyhedron
 A Topologically Convex Vertex-Ununfoldable Polyhedron Zachary Abel 1 Erik D. Demaine 2 Martin L. Demaine 2 1 MIT Department of Mathematics 2 MIT CSAIL CCCG 2011 Abel, Demaine, and Demaine (MIT) A Vertex-Ununfoldable
A Topologically Convex Vertex-Ununfoldable Polyhedron Zachary Abel 1 Erik D. Demaine 2 Martin L. Demaine 2 1 MIT Department of Mathematics 2 MIT CSAIL CCCG 2011 Abel, Demaine, and Demaine (MIT) A Vertex-Ununfoldable
Lecture 19: Introduction To Topology
 Chris Tralie, Duke University 3/24/2016 Announcements Group Assignment 2 Due Wednesday 3/30 First project milestone Friday 4/8/2016 Welcome to unit 3! Table of Contents The Euler Characteristic Spherical
Chris Tralie, Duke University 3/24/2016 Announcements Group Assignment 2 Due Wednesday 3/30 First project milestone Friday 4/8/2016 Welcome to unit 3! Table of Contents The Euler Characteristic Spherical
Hyperbolic structures and triangulations
 CHAPTER Hyperbolic structures and triangulations In chapter 3, we learned that hyperbolic structures lead to developing maps and holonomy, and that the developing map is a covering map if and only if the
CHAPTER Hyperbolic structures and triangulations In chapter 3, we learned that hyperbolic structures lead to developing maps and holonomy, and that the developing map is a covering map if and only if the
CORRELATION TO GEORGIA QUALITY CORE CURRICULUM FOR GEOMETRY (GRADES 9-12)
") CORRELATION TO GEORGIA (GRADES 9-12) SUBJECT AREA: Mathematics COURSE: 27. 06300 TEXTBOOK TITLE: PUBLISHER: Geometry: Tools for a Changing World 2001 Prentice Hall 1 Solves problems and practical applications
CORRELATION TO GEORGIA (GRADES 9-12) SUBJECT AREA: Mathematics COURSE: 27. 06300 TEXTBOOK TITLE: PUBLISHER: Geometry: Tools for a Changing World 2001 Prentice Hall 1 Solves problems and practical applications
What is dimension? An investigation by Laura Escobar. Math Explorer s Club
 What is dimension? An investigation by Laura Escobar Math Explorer s Club The goal of this activity is to introduce you to the notion of dimension. The movie Flatland is also a great way to learn about
What is dimension? An investigation by Laura Escobar Math Explorer s Club The goal of this activity is to introduce you to the notion of dimension. The movie Flatland is also a great way to learn about
INTRODUCTION TO 3-MANIFOLDS
 INTRODUCTION TO 3-MANIFOLDS NIK AKSAMIT As we know, a topological n-manifold X is a Hausdorff space such that every point contained in it has a neighborhood (is contained in an open set) homeomorphic to
INTRODUCTION TO 3-MANIFOLDS NIK AKSAMIT As we know, a topological n-manifold X is a Hausdorff space such that every point contained in it has a neighborhood (is contained in an open set) homeomorphic to
ON THE MAXIMAL VOLUME OF THREE-DIMENSIONAL HYPERBOLIC COMPLETE ORTHOSCHEMES
 Proceedings of the Institute of Natural Sciences, Nihon University No.49 04 pp.63 77 ON THE MAXIMAL VOLUME OF THREE-DIMENSIONAL HYPERBOLIC COMPLETE ORTHOSCHEMES Kazuhiro ICHIHARA and Akira USHIJIMA Accepted
Proceedings of the Institute of Natural Sciences, Nihon University No.49 04 pp.63 77 ON THE MAXIMAL VOLUME OF THREE-DIMENSIONAL HYPERBOLIC COMPLETE ORTHOSCHEMES Kazuhiro ICHIHARA and Akira USHIJIMA Accepted
1/60. Geometric Algorithms. Lecture 1: Introduction. Convex Hulls
 1/60 Geometric Algorithms Lecture 1: Introduction Convex Hulls Geometric algorithms scope 2/60 Geometry algorithms (practice): Study of geometric problems that arise in various applications and how algorithms
1/60 Geometric Algorithms Lecture 1: Introduction Convex Hulls Geometric algorithms scope 2/60 Geometry algorithms (practice): Study of geometric problems that arise in various applications and how algorithms
Solutions to problem set 1
 Massachusetts Institute of Technology Handout 5 6.838: Geometric Computation October 4, 2001 Professors Piotr Indyk and Seth Teller Solutions to problem set 1 (mostly taken from the solution set of Jan
Massachusetts Institute of Technology Handout 5 6.838: Geometric Computation October 4, 2001 Professors Piotr Indyk and Seth Teller Solutions to problem set 1 (mostly taken from the solution set of Jan
Lecture 3: Art Gallery Problems and Polygon Triangulation
 EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
(1) Page #2 26 Even. (2) Page 596 #1 14. (3) Page #15 25 ; FF #26 and 28. (4) Page 603 #1 18. (5) Page #19 26
 Page #2 26 Even. (2) Page 596 #1 14. (3) Page #15 25 ; FF #26 and 28. (4) Page 603 #1 18. (5) Page #19 26") Geometry/Trigonometry Unit 10: Surface Area and Volume of Solids Notes Name: Date: Period: # (1) Page 590 591 #2 26 Even (2) Page 596 #1 14 (3) Page 596 597 #15 25 ; FF #26 and 28 (4) Page 603 #1 18 (5)
Geometry/Trigonometry Unit 10: Surface Area and Volume of Solids Notes Name: Date: Period: # (1) Page 590 591 #2 26 Even (2) Page 596 #1 14 (3) Page 596 597 #15 25 ; FF #26 and 28 (4) Page 603 #1 18 (5)