3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College
|
|
|
- Virgil Parker
- 5 years ago
- Views:
Transcription
1 3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College
2 Convex Hulls The problem: Given a set P of points, compute their convex hull 2D 3D

3 2D 3D polygon polyhedron



4 Polyhedron region of space whose boundary consists of vertices, edges and faces faces intersect properly neighborhood of any point on P is homeomorphic to a disk surface of P is connected
5
6 Convexity A polygon P is convex if for any p, q in P, the segment pq lies entirely in P. convex non-convex
7 Convexity A polyhedron P is convex if for any p, q in P, the segment pq lies entirely in P. convex non-convex

8 convex polyhedron : polytop
9 digression start
10 Regular polygons in 2D A regular polygon has equal sides and angles
 Surprisingly, there exist only 5 regular")
11 Regular polytops in 3D Regular polytop: faces are congruent regular polygons the number of faces incident to each vertex is the same (and equal angles) Surprisingly, there exist only 5 regular polytops
12 digression end
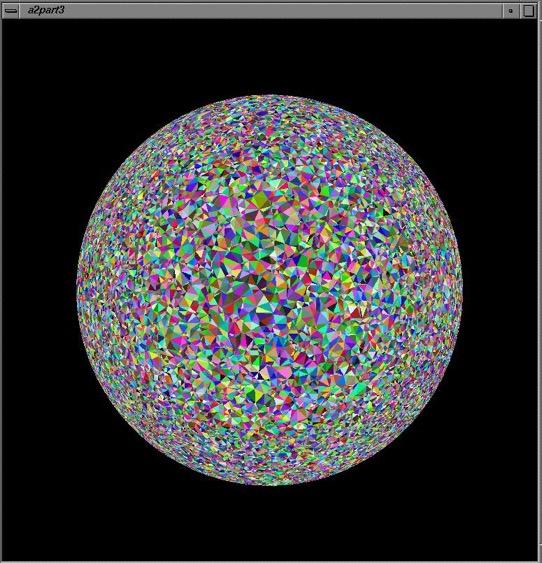
13 Convex Hulls in 3D 3D convex hull = smallest convex polyhedron (polytope) that contains P
 that contains P")
14 Convex Hulls in 3D 3D convex hull = smallest convex polyhedron (polytope) that contains P
15 Properties of 2d hull 2d hull consists of edges and vertices All edges of hull are extreme and all extreme edges of P are on the hull All points of hull are extreme and all extreme points of P are on the hull All internal angles are < 180 Walking counterclockwise > left turns Points on CH are sorted in radial order wrt a point inside
16 Properties of 3d hull 3d hull consists of: faces, edges and vertices All edges of hull are extreme and all extreme edges of P are on the hull All points of hull are extreme and all extreme points of P are on the hull All faces of hull are extreme and all extreme faces are on the hull All internal angles between faces are < 180 Walking counterclockwise > left turns Points on CH are sorted in radial order wrt a point inside
17 Faces, edges, vertices on the hull are extreme. 2D 3D

 which cuts the line of")
18 A dihedral angle is the angle between two intersecting planes. Angle between two planes (α, β, green) in a third plane (pink) which cuts the line of intersection at right angles

19
20 Computing the Hull 2D 3D Naive O(n 3 ) Gift wrapping O(nh) Graham scan O(n lg n) Extend to 3D? Quickhull O(n lg n), O(n 2 ) Incremental O(n lg n) Divide-andconquer O(n lg n)
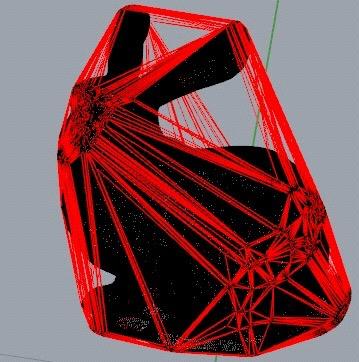
21 3d hull: Naive algorithm Algorithm For every triplet of points (pi,pj,pk): check if plane defined by it is extreme if it is, add it to the list of CH faces Briefly sketch how to determine if a triplet is extreme and analyze it is_extreme(point3d a, point3d b, point3d c, vector<point3d> P) 3d hull naive: running time?

22 3d hull: Gift wrapping Algorithm find a face guaranteed to be on the CH REPEAT find an edge e of a face f that s on the CH, and such that the face on the other side of e has not been found. for all remaining points pi, find the angle of (e,pi) with f find point pi with the minimal angle; add face (e,pi) to CH Analysis: O(n x F), where F is the number of faces on CH
23 3d hull: Gift wrapping Algorithm find a face guaranteed to be on the CH REPEAT find an edge e of a face f that s on the CH, and such that the face on the other side of e has not been found. for all remaining points pi, find the angle of (e,pi) with f find point pi with the minimal angle; add face (e,pi) to CH To think finding first face? How to keep track of the hull? we ll need to store the connectivity (what faces are adjacent, for an edge which faces its adjacent to, etc) How to keep track of the boundary of the hull (the edges that have only one face discovered)?
 Fast 3D convex hull algorithms with")
24 Gift wrapping in 3D YouTube Video of CH in 3D (by Lucas Benevides) Fast 3D convex hull algorithms with CGAL
25 From 2D to 3D 2D 3D Naive O(n 3 ) O(n 4 ) Gift wrapping O(nh) O(n x F) Graham scan O(n lg n) Quickhull O(n lg n), O(n 2 ) does not extend to 3D Incremental O(n lg n) Divide-andconquer O(n lg n)
26 From 2D to 3D 2D 3D Naive O(n 3 ) O(n 4 ) Gift wrapping O(nh) O(n x F) Graham scan O(n lg n) does not extend to 3D Quickhull O(n lg n), O(n 2 ) yes Incremental O(n lg n) O(n 2 ) Divide-andconquer O(n lg n) O(n lg n)
27 Incremental 3D hull
28 Incremental CH = {p1,p2,p3} for i= 4 to n //CH represents the CH of p 1..p i-1 add p i to CH and update CH to represent the CH of p 1..p i 2D 3D
29 Terminology: Point in front/behind face c p b p a ps is left of (behind) abc abc not visible from p p is right of (in front) abc abc visible from p
30 2D 2 signedarea(a,b,c) = det a.x a.y 1 b.x b.y 1 c.x c.y 1 c positive area (c left/behind ab) b a c negative area (c right/in front of ab)
31 3D 6 signedvolume(a,b,c,d) = det a.x a.y a.z 1 b.x b.y b.z 1 c.x c.y c.z 1 d.x d.y d.z 1 c d positive volume (p behind face) a b negative volume (d in front of face)
32 Assume all faces oriented counterclockwise so that their normals determined by the right-hand rule point towards the outside of P. c p b p positive volume (p behind face) a negative volume (p in front of face) is_visible(a,b,c,p): return signedvolume(a,b,c,p) < 0
33 Incremental 3D The visible faces are precisely those that need to be discarded The edges on the boundary of the visible region are the basis of the cone
34 Incremental Algorithm: incremental hull 3d initialize H = p1, p2, p3, p4 for i = 5 to n do: for each face f of H do: compute volume of tetrahedron formed by (f,pi) if volume < 0: f is visible if no faces are visible discard pi (pi must be inside H) else find border edge of all visible faces for each border edge e construct a face (e,pi) and add to H for each visible face f: delete f from H
35 3d hull: divide & conquer The same idea as 2D algorithm divide points in two halves P1 and P2 recursively find CH(P1) and CH(P2) merge If merge in O(n) time ==> O( n lg n) algorithm
36 Merge Merged hull: cylinder without end caps
37 Merge Idea: Start with the lower tangent, wrap around, find one face at a time.
38 Merge Let PI be a plane that supports the hull from below Claim: When we rotate PI around ab, the first vertex hit c must be a vertex adjacent to a or b c has the smallest angle among all neighbors of a,b
39 Merge 1. Find a common tangent ab a b
40 Merge 1. Find a common tangent ab Now we need to find a triangle abc. If c is on the right hull, then bc is an edge on the right hull. a c b
41 Merge 1. Find a common tangent ab Now we need to find a triangle abc. If c is on the right hull, then bc is an edge on the right hull. Now we have a new edge ac that s a tangent. Repeat. a c b
42 Merge 1. Find a common tangent ab Now we need to find a triangle abc. If c is on the right hull, then bc is an edge on the right hull.. Now we have a new edge ac that s a tangent. Repeat. d a c b
43 Merge 1. Find a common tangent ab Now we need to find a triangle abc. If c is on the right hull, then bc is an edge on the right hull. Now we have a new edge ac that s a tangent. Repeat. a d e c b
44 Merge 1. Find a common tangent ab Now we need to find a triangle abc. If c is on the right hull, then bc is an edge on the right hull. Now we have a new edge ac that s a tangent. Repeat. a d e c b
45 Merge 1. Find a common tangent ab 2. Start from ab and wrap around, to create the cylinder of triangles that connects the two hulls A and B 3. Find and delete the hidden faces that are inside the cylinder


46 The hidden faces start from the edges on the boundary of the cylinder BFS or DFS faces towards the cylinder all faces reached are inside
47 3d hull: divide & conquer Theoretically important and elegant Of all algorithms that extend to 3D, DC& is the only one that achieves optimal ( n lg n) Difficult to implement The slower algorithms (quickhull, incremental) preferred in practice
3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College
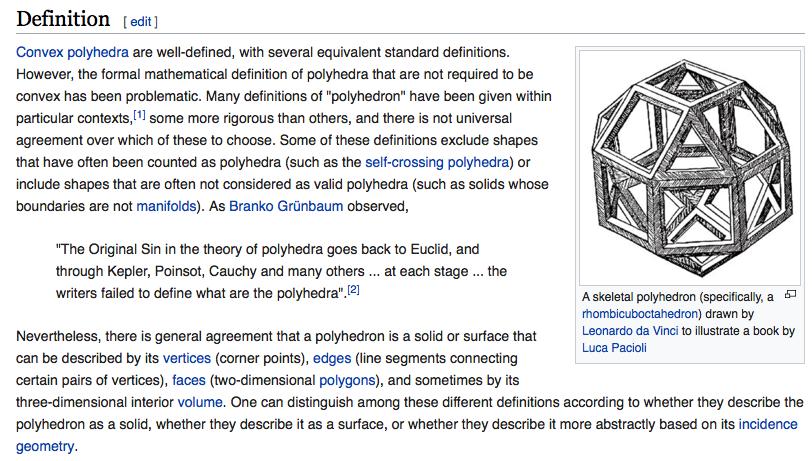
![3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College](/thumbs/75/72944672.jpg "3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College") 3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull in 3D The problem: Given a set P of points in 3D, compute their convex hull convex polyhedron 2D 3D polygon
3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull in 3D The problem: Given a set P of points in 3D, compute their convex hull convex polyhedron 2D 3D polygon
Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College
![Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College](/thumbs/86/93358306.jpg "Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College") Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull Given a set P of points in 2D, their convex hull is the smallest convex polygon that contains all points
Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull Given a set P of points in 2D, their convex hull is the smallest convex polygon that contains all points
Computational Geometry 2D Convex Hulls. Joseph S. B. Mitchell Stony Brook University
 Computational Geometry 2D Convex Hulls Joseph S. B. Mitchell Stony Brook University Comparing O(n), O(n log n), O(n 2 ) n n log n n² 2 10 10³ 10 2 10 10 4 2 20 10 6 2 20 10 6 20 2 20 2 10 7 2 40 10 12
Computational Geometry 2D Convex Hulls Joseph S. B. Mitchell Stony Brook University Comparing O(n), O(n log n), O(n 2 ) n n log n n² 2 10 10³ 10 2 10 10 4 2 20 10 6 2 20 10 6 20 2 20 2 10 7 2 40 10 12
Advanced Algorithms Computational Geometry Prof. Karen Daniels. Spring, 2010
 UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Spring, 2010 Lecture 3 O Rourke Chapter 3: 2D Convex Hulls Thursday, 2/18/10 Chapter 3 2D Convex Hulls
UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Spring, 2010 Lecture 3 O Rourke Chapter 3: 2D Convex Hulls Thursday, 2/18/10 Chapter 3 2D Convex Hulls
Convex Hulls in Three Dimensions. Polyhedra
 Convex Hulls in Three Dimensions Polyhedra Polyhedron 1.A polyhedron is the generalization of a 2- D polygon to 3-D A finite number of flat polygonal faces The boundary or surface of a polyhedron - Zero-dimensional
Convex Hulls in Three Dimensions Polyhedra Polyhedron 1.A polyhedron is the generalization of a 2- D polygon to 3-D A finite number of flat polygonal faces The boundary or surface of a polyhedron - Zero-dimensional
Convex Hull Algorithms
 Convex Hull Algorithms Design and Analysis of Algorithms prof. F. Malucelli Villa Andrea e Ceriani Simone Outline Problem Definition Basic Concepts Bruteforce Algorithm Graham Scan Algorithm Divide and
Convex Hull Algorithms Design and Analysis of Algorithms prof. F. Malucelli Villa Andrea e Ceriani Simone Outline Problem Definition Basic Concepts Bruteforce Algorithm Graham Scan Algorithm Divide and
Computational Geometry 2D Convex Hulls
 Computational Geometry 2D Convex Hulls Joseph S. B. Mitchell Stony Brook University Chapter 2: Devadoss-O Rourke Convexity p p Set X is convex if p,q X pq X q q convex non-convex Point p X is an extreme
Computational Geometry 2D Convex Hulls Joseph S. B. Mitchell Stony Brook University Chapter 2: Devadoss-O Rourke Convexity p p Set X is convex if p,q X pq X q q convex non-convex Point p X is an extreme
Week 7 Convex Hulls in 3D
 1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
High-Dimensional Computational Geometry. Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018
 High-Dimensional Computational Geometry Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018 Outline 3-D vector geometry High-D hyperplane intersections Convex hull & its extension to 3
High-Dimensional Computational Geometry Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018 Outline 3-D vector geometry High-D hyperplane intersections Convex hull & its extension to 3
Computational Geometry Overview from Cormen, et al.
 UMass Lowell Computer Science 91.503 Graduate Algorithms Prof. Karen Daniels Spring, 2014 Computational Geometry Overview from Cormen, et al. Chapter 33 (with additional material from other sources) 1
UMass Lowell Computer Science 91.503 Graduate Algorithms Prof. Karen Daniels Spring, 2014 Computational Geometry Overview from Cormen, et al. Chapter 33 (with additional material from other sources) 1
Computational Geometry [csci 3250]
![Computational Geometry [csci 3250]](/thumbs/93/112686747.jpg "Computational Geometry [csci 3250]") Computational Geometry [csci 3250] Laura Toma Bowdoin College Polygon Triangulation Polygon Triangulation The problem: Triangulate a given polygon. (output a set of diagonals that partition the polygon
Computational Geometry [csci 3250] Laura Toma Bowdoin College Polygon Triangulation Polygon Triangulation The problem: Triangulate a given polygon. (output a set of diagonals that partition the polygon
2D Geometry. Pierre Alliez Inria Sophia Antipolis
 2D Geometry Pierre Alliez Inria Sophia Antipolis Outline Sample problems Polygons Graphs Convex hull Voronoi diagram Delaunay triangulation Sample Problems Line Segment Intersection Theorem: Segments (p
2D Geometry Pierre Alliez Inria Sophia Antipolis Outline Sample problems Polygons Graphs Convex hull Voronoi diagram Delaunay triangulation Sample Problems Line Segment Intersection Theorem: Segments (p
Last time. Today: Convex Hull Brute Force Inside(q,abc) Intersect(ab,cd) Orient(a,b,c).
 Intersect(ab,cd) Orient(a,b,c).") Last time Convex Hull Brute Force Inside(q,abc) Intersect(ab,cd) Orient(a,b,c). Today: More efficient convex hull algorithms and absolute bounds. Two (of many) algorithms. One (of one) interesting reduction.
Last time Convex Hull Brute Force Inside(q,abc) Intersect(ab,cd) Orient(a,b,c). Today: More efficient convex hull algorithms and absolute bounds. Two (of many) algorithms. One (of one) interesting reduction.
Polygon Triangulation
 Polygon Triangulation The problem: Triangulate a given polygon. (output a set of diagonals that partition the polygon into triangles). Computational Geometry [csci 3250] Polygon Triangulation Laura Toma
Polygon Triangulation The problem: Triangulate a given polygon. (output a set of diagonals that partition the polygon into triangles). Computational Geometry [csci 3250] Polygon Triangulation Laura Toma
Computational Geometry Lab: SEARCHING A TETRAHEDRAL MESH
 Computational Geometry Lab: SEARCHING A TETRAHEDRAL MESH John Burkardt Information Technology Department Virginia Tech http://people.sc.fsu.edu/ jburkardt/presentations/cg lab search tet mesh.pdf December
Computational Geometry Lab: SEARCHING A TETRAHEDRAL MESH John Burkardt Information Technology Department Virginia Tech http://people.sc.fsu.edu/ jburkardt/presentations/cg lab search tet mesh.pdf December
CS 6463: AT Computational Geometry Spring 2006 Convex Hulls Carola Wenk
 CS 6463: AT Computational Geometry Spring 2006 Convex Hulls Carola Wenk 8/29/06 CS 6463: AT Computational Geometry 1 Convex Hull Problem Given a set of pins on a pinboard and a rubber band around them.
CS 6463: AT Computational Geometry Spring 2006 Convex Hulls Carola Wenk 8/29/06 CS 6463: AT Computational Geometry 1 Convex Hull Problem Given a set of pins on a pinboard and a rubber band around them.
Prof. Gill Barequet. Center for Graphics and Geometric Computing, Technion. Dept. of Computer Science The Technion Haifa, Israel
 Computational Geometry (CS 236719) http://www.cs.tufts.edu/~barequet/teaching/cg Chapter 1 Introduction 1 Copyright 2002-2009 2009 Prof. Gill Barequet Center for Graphics and Geometric Computing Dept.
Computational Geometry (CS 236719) http://www.cs.tufts.edu/~barequet/teaching/cg Chapter 1 Introduction 1 Copyright 2002-2009 2009 Prof. Gill Barequet Center for Graphics and Geometric Computing Dept.
Voronoi diagrams Delaunay Triangulations. Pierre Alliez Inria
 Voronoi diagrams Delaunay Triangulations Pierre Alliez Inria Voronoi Diagram Voronoi Diagram Voronoi Diagram The collection of the non-empty Voronoi regions and their faces, together with their incidence
Voronoi diagrams Delaunay Triangulations Pierre Alliez Inria Voronoi Diagram Voronoi Diagram Voronoi Diagram The collection of the non-empty Voronoi regions and their faces, together with their incidence
Geometric Algorithms in Three Dimensions Tutorial. FSP Seminar, Strobl,
 Geometric Algorithms in Three Dimensions Tutorial FSP Seminar, Strobl, 22.06.2006 Why Algorithms in Three and Higher Dimensions Which algorithms (convex hulls, triangulations etc.) can be generalized to
Geometric Algorithms in Three Dimensions Tutorial FSP Seminar, Strobl, 22.06.2006 Why Algorithms in Three and Higher Dimensions Which algorithms (convex hulls, triangulations etc.) can be generalized to
Computational Geometry
 Lecture 1: Introduction and convex hulls Geometry: points, lines,... Geometric objects Geometric relations Combinatorial complexity Computational geometry Plane (two-dimensional), R 2 Space (three-dimensional),
Lecture 1: Introduction and convex hulls Geometry: points, lines,... Geometric objects Geometric relations Combinatorial complexity Computational geometry Plane (two-dimensional), R 2 Space (three-dimensional),
Flavor of Computational Geometry. Convex Hull in 2D. Shireen Y. Elhabian Aly A. Farag University of Louisville
 Flavor of Computational Geometry Convex Hull in 2D Shireen Y. Elhabian Aly A. Farag University of Louisville February 2010 Agenda Introduction Definitions of Convexity and Convex Hulls Naïve Algorithms
Flavor of Computational Geometry Convex Hull in 2D Shireen Y. Elhabian Aly A. Farag University of Louisville February 2010 Agenda Introduction Definitions of Convexity and Convex Hulls Naïve Algorithms
Computational Geometry. Algorithm Design (10) Computational Geometry. Convex Hull. Areas in Computational Geometry
 Computational Geometry. Convex Hull. Areas in Computational Geometry") Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
A Minimalist s Implementation of the 3-d Divide-and-Conquer Convex Hull Algorithm
 A Minimalist s Implementation of the 3-d Divide-and-Conquer Convex Hull Algorithm Timothy M. Chan Presented by Dana K. Jansens Carleton University Simple Polygons Polygon = A consecutive set of vertices
A Minimalist s Implementation of the 3-d Divide-and-Conquer Convex Hull Algorithm Timothy M. Chan Presented by Dana K. Jansens Carleton University Simple Polygons Polygon = A consecutive set of vertices
Spherical Maze Generation
 Spherical Maze Generation Xue Li 1 and David Mount 2 1 Department of Computer Science, University of Maryland, College Park echolixue@gmail.com 2 Department of Computer Science, University of Maryland,
Spherical Maze Generation Xue Li 1 and David Mount 2 1 Department of Computer Science, University of Maryland, College Park echolixue@gmail.com 2 Department of Computer Science, University of Maryland,
15-451/651: Algorithms CMU, Spring 2016 Lecture #24: Computational Geometry Introduciton April 13, 2015 Lecturer: Danny Sleator
 15-451/651: Algorithms CMU, Spring 2016 Lecture #24: Computational Geometry Introduciton April 13, 2015 Lecturer: Danny Sleator 1 Introduction Computational geometry is the design and analysis of algorithms
15-451/651: Algorithms CMU, Spring 2016 Lecture #24: Computational Geometry Introduciton April 13, 2015 Lecturer: Danny Sleator 1 Introduction Computational geometry is the design and analysis of algorithms
Computational Geometry
 Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
Voronoi diagram and Delaunay triangulation
 Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
The Art Gallery Problem
 The Art Gallery Problem Imagine an art gallery whose floor plan is a simple polygon, and a guard (a point) inside the gallery. Computational Geometry [csci 3250] The Art Gallery Problem Laura Toma Bowdoin
The Art Gallery Problem Imagine an art gallery whose floor plan is a simple polygon, and a guard (a point) inside the gallery. Computational Geometry [csci 3250] The Art Gallery Problem Laura Toma Bowdoin
Computational Geometry TOPICS Preliminaries Point in a Polygon Polygon Construction Convex Hulls
 Computational Geometry TOPICS Preliminaries Point in a Polygon Polygon Construction Convex Hulls CSE5311 Kumar 1 Geometric Algorithms Geometric Algorithms find applications in such areas as Computer Graphics
Computational Geometry TOPICS Preliminaries Point in a Polygon Polygon Construction Convex Hulls CSE5311 Kumar 1 Geometric Algorithms Geometric Algorithms find applications in such areas as Computer Graphics
Computational Geometry [csci 3250]
![Computational Geometry [csci 3250]](/thumbs/75/72526151.jpg "Computational Geometry [csci 3250]") Computational Geometry [csci 3250] Laura Toma Bowdoin College The Art Gallery Problem The Art Gallery Problem Imagine an art gallery whose floor plan is a simple polygon, and a guard (a point) inside the
Computational Geometry [csci 3250] Laura Toma Bowdoin College The Art Gallery Problem The Art Gallery Problem Imagine an art gallery whose floor plan is a simple polygon, and a guard (a point) inside the
COMPUTATIONAL GEOMETRY
 Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
1/60. Geometric Algorithms. Lecture 1: Introduction. Convex Hulls
 1/60 Geometric Algorithms Lecture 1: Introduction Convex Hulls Geometric algorithms scope 2/60 Geometry algorithms (practice): Study of geometric problems that arise in various applications and how algorithms
1/60 Geometric Algorithms Lecture 1: Introduction Convex Hulls Geometric algorithms scope 2/60 Geometry algorithms (practice): Study of geometric problems that arise in various applications and how algorithms
Computational geometry
 Computational geometry Inge Li Gørtz CLRS Chapter 33.0, 33.1, 33.3. Computational Geometry Geometric problems (this course Euclidean plane). Does a set of line segments intersect, dividing plane into regions,
Computational geometry Inge Li Gørtz CLRS Chapter 33.0, 33.1, 33.3. Computational Geometry Geometric problems (this course Euclidean plane). Does a set of line segments intersect, dividing plane into regions,
Geometry. Zachary Friggstad. Programming Club Meeting
 Geometry Zachary Friggstad Programming Club Meeting Points #i n c l u d e typedef complex p o i n t ; p o i n t p ( 1. 0, 5. 7 ) ; p. r e a l ( ) ; // x component p. imag ( ) ; // y component
Geometry Zachary Friggstad Programming Club Meeting Points #i n c l u d e typedef complex p o i n t ; p o i n t p ( 1. 0, 5. 7 ) ; p. r e a l ( ) ; // x component p. imag ( ) ; // y component
The convex hull of a set Q of points is the smallest convex polygon P for which each point in Q is either on the boundary of P or in its interior.
 CS 312, Winter 2007 Project #1: Convex Hull Due Dates: See class schedule Overview: In this project, you will implement a divide and conquer algorithm for finding the convex hull of a set of points and
CS 312, Winter 2007 Project #1: Convex Hull Due Dates: See class schedule Overview: In this project, you will implement a divide and conquer algorithm for finding the convex hull of a set of points and
General Pyramids. General Cone. Right Circular Cone = "Cone"
 Aim #6: What are general pyramids and cones? CC Geometry H Do Now: Put the images shown below into the groups (A,B,C and D) based on their properties. Group A: General Cylinders Group B: Prisms Group C:
Aim #6: What are general pyramids and cones? CC Geometry H Do Now: Put the images shown below into the groups (A,B,C and D) based on their properties. Group A: General Cylinders Group B: Prisms Group C:
Computational Geometry. Geometry Cross Product Convex Hull Problem Sweep Line Algorithm
 GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
BSP Trees. Chapter Introduction. 8.2 Overview
 Chapter 8 BSP Trees 8.1 Introduction In this document, we assume that the objects we are dealing with are represented by polygons. In fact, the algorithms we develop actually assume the polygons are triangles,
Chapter 8 BSP Trees 8.1 Introduction In this document, we assume that the objects we are dealing with are represented by polygons. In fact, the algorithms we develop actually assume the polygons are triangles,
Geometry 1-1. Non-collinear Points not on the same line. Need at least 3 points to be non-collinear since two points are always collinear
 Name Geometry 1-1 Undefined terms terms which cannot be defined only described. Point, line, plane Point a location in space Line a series of points that extends indefinitely in opposite directions. It
Name Geometry 1-1 Undefined terms terms which cannot be defined only described. Point, line, plane Point a location in space Line a series of points that extends indefinitely in opposite directions. It
Advanced Algorithms Computational Geometry Prof. Karen Daniels. Fall, 2012
 UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 O Rourke Chapter 7 Search & Intersection Chapter 7 Search & Intersection Segment-Segment Intersection
UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 O Rourke Chapter 7 Search & Intersection Chapter 7 Search & Intersection Segment-Segment Intersection
CSE 5311 Notes 13: Computational Geometry
 CSE 5311 Notes 13: Computational Geometry (Last updated 4/17/17 4:39 PM) SMALLEST ENCLOSING DISK See section 4.7 of de Berg ( http://dx.doi.org.ezproxy.uta.edu/10.1007/978-3-540-77974-2 ) Algorithm MINIDISC(P)
CSE 5311 Notes 13: Computational Geometry (Last updated 4/17/17 4:39 PM) SMALLEST ENCLOSING DISK See section 4.7 of de Berg ( http://dx.doi.org.ezproxy.uta.edu/10.1007/978-3-540-77974-2 ) Algorithm MINIDISC(P)
Ray Tracing Basics I. Computer Graphics as Virtual Photography. camera (captures light) real scene. photo. Photographic print. Photography: processing
 real scene. photo. Photographic print. Photography: processing") Ray Tracing Basics I Computer Graphics as Virtual Photography Photography: real scene camera (captures light) photo processing Photographic print processing Computer Graphics: 3D models camera model (focuses
Ray Tracing Basics I Computer Graphics as Virtual Photography Photography: real scene camera (captures light) photo processing Photographic print processing Computer Graphics: 3D models camera model (focuses
COMP331/557. Chapter 2: The Geometry of Linear Programming. (Bertsimas & Tsitsiklis, Chapter 2)
") COMP331/557 Chapter 2: The Geometry of Linear Programming (Bertsimas & Tsitsiklis, Chapter 2) 49 Polyhedra and Polytopes Definition 2.1. Let A 2 R m n and b 2 R m. a set {x 2 R n A x b} is called polyhedron
COMP331/557 Chapter 2: The Geometry of Linear Programming (Bertsimas & Tsitsiklis, Chapter 2) 49 Polyhedra and Polytopes Definition 2.1. Let A 2 R m n and b 2 R m. a set {x 2 R n A x b} is called polyhedron
Lecture 7: Computational Geometry
 Lecture 7: Computational Geometry CS 491 CAP Uttam Thakore Friday, October 7 th, 2016 Credit for many of the slides on solving geometry problems goes to the Stanford CS 97SI course lecture on computational
Lecture 7: Computational Geometry CS 491 CAP Uttam Thakore Friday, October 7 th, 2016 Credit for many of the slides on solving geometry problems goes to the Stanford CS 97SI course lecture on computational
Polygon Triangulation
 Polygon Triangulation Definition Simple Polygons 1. A polygon is the region of a plane bounded by a finite collection of line segments forming a simple closed curve. 2. Simple closed curve means a certain
Polygon Triangulation Definition Simple Polygons 1. A polygon is the region of a plane bounded by a finite collection of line segments forming a simple closed curve. 2. Simple closed curve means a certain
Computational Geometry. HKU ACM ICPC Training 2010
 Computational Geometry HKU ACM ICPC Training 2010 1 What is Computational Geometry? Deals with geometrical structures Points, lines, line segments, vectors, planes, etc. A relatively boring class of problems
Computational Geometry HKU ACM ICPC Training 2010 1 What is Computational Geometry? Deals with geometrical structures Points, lines, line segments, vectors, planes, etc. A relatively boring class of problems
8.1 Geometric Queries for Ray Tracing
 Fall 2017 CSCI 420: Computer Graphics 8.1 Geometric Queries for Ray Tracing Hao Li http://cs420.hao-li.com 1 Outline Ray-Surface Intersections Special cases: sphere, polygon Barycentric coordinates 2 Outline
Fall 2017 CSCI 420: Computer Graphics 8.1 Geometric Queries for Ray Tracing Hao Li http://cs420.hao-li.com 1 Outline Ray-Surface Intersections Special cases: sphere, polygon Barycentric coordinates 2 Outline
Algorithms for GIS. Spatial data: Models and representation (part I) Laura Toma. Bowdoin College
 Laura Toma. Bowdoin College") Algorithms for GIS Spatial data: Models and representation (part I) Laura Toma Bowdoin College Outline Spatial data in GIS applications Point data Networks Terrains Planar maps and meshes Data structures
Algorithms for GIS Spatial data: Models and representation (part I) Laura Toma Bowdoin College Outline Spatial data in GIS applications Point data Networks Terrains Planar maps and meshes Data structures
1. CONVEX POLYGONS. Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D.
 1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
Graduate Algorithms CS F-19 Computational Geometry
 Graduate Algorithms CS673-016F-19 Comutational Geometry David Galles Deartment of Comuter Science University of San Francisco 19-0: Cross Products Given any two oints 1 = (x 1,y 1 ) and = (x,y ) Cross
Graduate Algorithms CS673-016F-19 Comutational Geometry David Galles Deartment of Comuter Science University of San Francisco 19-0: Cross Products Given any two oints 1 = (x 1,y 1 ) and = (x,y ) Cross
Advanced Algorithms Computational Geometry Prof. Karen Daniels. Fall, 2012
 UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
Advanced Algorithm Homework 4 Results and Solutions
 Advanced Algorithm Homework 4 Results and Solutions ID 1 2 3 4 5 Av Ex 2554 6288 9919 10 6 10 10 9.5 8.9 10-1 4208 10 10 9 8.5 10 9.5 9 0996 10 10 10 10 10 10 10 8239 10 10 10 10 10 10 10 7388 8 8.5 9
Advanced Algorithm Homework 4 Results and Solutions ID 1 2 3 4 5 Av Ex 2554 6288 9919 10 6 10 10 9.5 8.9 10-1 4208 10 10 9 8.5 10 9.5 9 0996 10 10 10 10 10 10 10 8239 10 10 10 10 10 10 10 7388 8 8.5 9
3D Rendering and Ray Casting
 3D Rendering and Ray Casting Michael Kazhdan (601.457/657) HB Ch. 13.7, 14.6 FvDFH 15.5, 15.10 Rendering Generate an image from geometric primitives Rendering Geometric Primitives (3D) Raster Image (2D)
3D Rendering and Ray Casting Michael Kazhdan (601.457/657) HB Ch. 13.7, 14.6 FvDFH 15.5, 15.10 Rendering Generate an image from geometric primitives Rendering Geometric Primitives (3D) Raster Image (2D)
Computational Geometry csci3250. Laura Toma. Bowdoin College
 Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Cross products. p 2 p. p p1 p2. p 1. Line segments The convex combination of two distinct points p1 ( x1, such that for some real number with 0 1,
 CHAPTER 33 Comutational Geometry Is the branch of comuter science that studies algorithms for solving geometric roblems. Has alications in many fields, including comuter grahics robotics, VLSI design comuter
CHAPTER 33 Comutational Geometry Is the branch of comuter science that studies algorithms for solving geometric roblems. Has alications in many fields, including comuter grahics robotics, VLSI design comuter
5200/7200 Fall 2007 Concurrence theorems for triangles
 5200/7200 Fall 2007 Concurrence theorems for triangles There are two basic concurrence theorems for triangles that hold in neutral geometry, that of medians and of angle bisectors, but it seems hard to
5200/7200 Fall 2007 Concurrence theorems for triangles There are two basic concurrence theorems for triangles that hold in neutral geometry, that of medians and of angle bisectors, but it seems hard to
Lecture 2: Divide and Conquer
 Lecture 2: Divide and Conquer Paradigm Convex Hull Median finding Paradigm Given a problem of size n divide it into subproblems of size n, a 1, b >1. Solve each b subproblem recursively. Combine solutions
Lecture 2: Divide and Conquer Paradigm Convex Hull Median finding Paradigm Given a problem of size n divide it into subproblems of size n, a 1, b >1. Solve each b subproblem recursively. Combine solutions
There are two ways to name a line. What are the two ways?
 Geometry: 1-1 Points, Lines and Planes What are the Undefined Terms? The Undefined Terms are: What is a Point? How is a point named? Example: What is a Line? A line is named two ways. What are the two
Geometry: 1-1 Points, Lines and Planes What are the Undefined Terms? The Undefined Terms are: What is a Point? How is a point named? Example: What is a Line? A line is named two ways. What are the two
An Introduction to Computational Geometry: Arrangements and Duality
 An Introduction to Computational Geometry: Arrangements and Duality Joseph S. B. Mitchell Stony Brook University Some images from [O Rourke, Computational Geometry in C, 2 nd Edition, Chapter 6] Arrangement
An Introduction to Computational Geometry: Arrangements and Duality Joseph S. B. Mitchell Stony Brook University Some images from [O Rourke, Computational Geometry in C, 2 nd Edition, Chapter 6] Arrangement
Lecture 11 Combinatorial Planning: In the Plane
 CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
Stacks API and finding the convex hull. CS Spring 2017
 Stacks API and finding the convex hull CS 146 - Spring 2017 Today Collision detection Convex hull Graham scan algorithm DFS traversal The stack API push() pop()
Stacks API and finding the convex hull CS 146 - Spring 2017 Today Collision detection Convex hull Graham scan algorithm DFS traversal The stack API push() pop()
We have already studied equations of the line. There are several forms:
 Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
notes13.1inclass May 01, 2015
 Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
Mathematical Analysis of Tetrahedron (solid angle subtended by any tetrahedron at its vertex)
") From the SelectedWorks of Harish Chandra Rajpoot H.C. Rajpoot Winter March 29, 2015 Mathematical Analysis of Tetrahedron solid angle subtended by any tetrahedron at its vertex) Harish Chandra Rajpoot Rajpoot,
From the SelectedWorks of Harish Chandra Rajpoot H.C. Rajpoot Winter March 29, 2015 Mathematical Analysis of Tetrahedron solid angle subtended by any tetrahedron at its vertex) Harish Chandra Rajpoot Rajpoot,
arxiv: v1 [cs.cg] 11 Sep 2007
![arxiv: v1 [cs.cg] 11 Sep 2007](/thumbs/77/74677208.jpg "arxiv: v1 [cs.cg] 11 Sep 2007") Unfolding Restricted Convex Caps Joseph O Rourke arxiv:0709.1647v1 [cs.cg] 11 Sep 2007 September 11, 2007 Abstract This paper details an algorithm for unfolding a class of convex polyhedra, where each
Unfolding Restricted Convex Caps Joseph O Rourke arxiv:0709.1647v1 [cs.cg] 11 Sep 2007 September 11, 2007 Abstract This paper details an algorithm for unfolding a class of convex polyhedra, where each
Three Dimensional Geometry. Linear Programming
 Three Dimensional Geometry Linear Programming A plane is determined uniquely if any one of the following is known: The normal to the plane and its distance from the origin is given, i.e. equation of a
Three Dimensional Geometry Linear Programming A plane is determined uniquely if any one of the following is known: The normal to the plane and its distance from the origin is given, i.e. equation of a
Convex Hulls. Helen Cameron. Helen Cameron Convex Hulls 1/101
 Convex Hulls Helen Cameron Helen Cameron Convex Hulls 1/101 What Is a Convex Hull? Starting Point: Points in 2D y x Helen Cameron Convex Hulls 3/101 Convex Hull: Informally Imagine that the x, y-lane is
Convex Hulls Helen Cameron Helen Cameron Convex Hulls 1/101 What Is a Convex Hull? Starting Point: Points in 2D y x Helen Cameron Convex Hulls 3/101 Convex Hull: Informally Imagine that the x, y-lane is
Motion Planning. O Rourke, Chapter 8
 O Rourke, Chapter 8 Outline Translating a polygon Moving a ladder Shortest Path (Point-to-Point) Goal: Given disjoint polygons in the plane, and given positions s and t, find the shortest path from s to
O Rourke, Chapter 8 Outline Translating a polygon Moving a ladder Shortest Path (Point-to-Point) Goal: Given disjoint polygons in the plane, and given positions s and t, find the shortest path from s to
CS4733 Class Notes. 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles
 CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
If three points A (h, 0), P (a, b) and B (0, k) lie on a line, show that: a b 1.
, P (a, b) and B (0, k) lie on a line, show that: a b 1.") ASSIGNMENT ON STRAIGHT LINES LEVEL 1 (CBSE/NCERT/STATE BOARDS) 1 Find the angle between the lines joining the points (0, 0), (2, 3) and the points (2, 2), (3, 5). 2 What is the value of y so that the line
ASSIGNMENT ON STRAIGHT LINES LEVEL 1 (CBSE/NCERT/STATE BOARDS) 1 Find the angle between the lines joining the points (0, 0), (2, 3) and the points (2, 2), (3, 5). 2 What is the value of y so that the line
Surfaces: notes on Geometry & Topology
 Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
We have already studied equations of the line. There are several forms:
 Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
Intersection of planar figures. Intersection of a parallelogram and a triangle
 Intersection of planar figures Intersection of a parallelogram and a triangle Exercise. Given a parallelogram ABCD and a triangle P QR. Construct the intersection of the two figures. First, we consider
Intersection of planar figures Intersection of a parallelogram and a triangle Exercise. Given a parallelogram ABCD and a triangle P QR. Construct the intersection of the two figures. First, we consider
COS 226 Lecture 15: Geometric algorithms. Warning: intuition may mislead (continued)
") CS 226 ecture 15: eometric algorithms Warning: intuition may mislead (continued) Important applications involve geometry models of physical world computer graphics mathematical models x: Find intersections
CS 226 ecture 15: eometric algorithms Warning: intuition may mislead (continued) Important applications involve geometry models of physical world computer graphics mathematical models x: Find intersections
3D Rendering and Ray Casting
 3D Rendering and Ray Casting Michael Kazhdan (601.457/657) HB Ch. 13.7, 14.6 FvDFH 15.5, 15.10 Rendering Generate an image from geometric primitives Rendering Geometric Primitives (3D) Raster Image (2D)
3D Rendering and Ray Casting Michael Kazhdan (601.457/657) HB Ch. 13.7, 14.6 FvDFH 15.5, 15.10 Rendering Generate an image from geometric primitives Rendering Geometric Primitives (3D) Raster Image (2D)
Convex Hulls (3D) O Rourke, Chapter 4
 O Rourke, Chapter 4") Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Rubber bands. Chapter Rubber band representation
 Chapter 1 Rubber bands In the previous chapter, we already used the idea of looking at the graph geometrically, by placing its nodes on the line and replacing the edges by rubber bands. Since, however,
Chapter 1 Rubber bands In the previous chapter, we already used the idea of looking at the graph geometrically, by placing its nodes on the line and replacing the edges by rubber bands. Since, however,
MATH 116 REVIEW PROBLEMS for the FINAL EXAM
 MATH 116 REVIEW PROBLEMS for the FINAL EXAM The following questions are taken from old final exams of various calculus courses taught in Bilkent University 1. onsider the line integral (2xy 2 z + y)dx
MATH 116 REVIEW PROBLEMS for the FINAL EXAM The following questions are taken from old final exams of various calculus courses taught in Bilkent University 1. onsider the line integral (2xy 2 z + y)dx
Exploring Translations
 Exploring Translations 1. New Sketch: To open a new sketch go to FILE and click on New Sketch 2. Create a triangle. a. Using the SEGMENT tool, construct a triangle. b. Drag the cursor and release for each
Exploring Translations 1. New Sketch: To open a new sketch go to FILE and click on New Sketch 2. Create a triangle. a. Using the SEGMENT tool, construct a triangle. b. Drag the cursor and release for each
Optimal Compression of a Polyline with Segments and Arcs
 Optimal Compression of a Polyline with Segments and Arcs Alexander Gribov Esri 380 New York Street Redlands, CA 92373 Email: agribov@esri.com arxiv:1604.07476v5 [cs.cg] 10 Apr 2017 Abstract This paper
Optimal Compression of a Polyline with Segments and Arcs Alexander Gribov Esri 380 New York Street Redlands, CA 92373 Email: agribov@esri.com arxiv:1604.07476v5 [cs.cg] 10 Apr 2017 Abstract This paper
FORMULAS to UNDERSTAND & MEMORIZE
 1 of 6 FORMULAS to UNDERSTAND & MEMORIZE Now we come to the part where you need to just bear down and memorize. To make the process a bit simpler, I am providing all of the key info that they re going
1 of 6 FORMULAS to UNDERSTAND & MEMORIZE Now we come to the part where you need to just bear down and memorize. To make the process a bit simpler, I am providing all of the key info that they re going
3D Modeling Parametric Curves & Surfaces
 3D Modeling Parametric Curves & Surfaces Shandong University Spring 2012 3D Object Representations Raw data Point cloud Range image Polygon soup Solids Voxels BSP tree CSG Sweep Surfaces Mesh Subdivision
3D Modeling Parametric Curves & Surfaces Shandong University Spring 2012 3D Object Representations Raw data Point cloud Range image Polygon soup Solids Voxels BSP tree CSG Sweep Surfaces Mesh Subdivision
(1) Page #2 26 Even. (2) Page 596 #1 14. (3) Page #15 25 ; FF #26 and 28. (4) Page 603 #1 18. (5) Page #19 26
 Page #2 26 Even. (2) Page 596 #1 14. (3) Page #15 25 ; FF #26 and 28. (4) Page 603 #1 18. (5) Page #19 26") Geometry/Trigonometry Unit 10: Surface Area and Volume of Solids Notes Name: Date: Period: # (1) Page 590 591 #2 26 Even (2) Page 596 #1 14 (3) Page 596 597 #15 25 ; FF #26 and 28 (4) Page 603 #1 18 (5)
Geometry/Trigonometry Unit 10: Surface Area and Volume of Solids Notes Name: Date: Period: # (1) Page 590 591 #2 26 Even (2) Page 596 #1 14 (3) Page 596 597 #15 25 ; FF #26 and 28 (4) Page 603 #1 18 (5)
CS 373: Combinatorial Algorithms, Fall Name: Net ID: Alias: U 3 / 4 1
 CS 373: Combinatorial Algorithms, Fall 2000 Homework 1 (due November 16, 2000 at midnight) Starting with Homework 1, homeworks may be done in teams of up to three people. Each team turns in just one solution,
CS 373: Combinatorial Algorithms, Fall 2000 Homework 1 (due November 16, 2000 at midnight) Starting with Homework 1, homeworks may be done in teams of up to three people. Each team turns in just one solution,
Why Graham-Scan Needs to Sort Vertices Before Scanning
 Why Graham-Scan Needs to Sort Vertices Before Scanning Bill Thies November 12, 2004 6.046 Recitation Supplement Graham Scan: Sorting Step The first stage of Graham-Scan sorts the points by their polar
Why Graham-Scan Needs to Sort Vertices Before Scanning Bill Thies November 12, 2004 6.046 Recitation Supplement Graham Scan: Sorting Step The first stage of Graham-Scan sorts the points by their polar
Class Generated Review Sheet for Math 213 Final
 Class Generated Review Sheet for Math 213 Final Key Ideas 9.1 A line segment consists of two point on a plane and all the points in between them. Complementary: The sum of the two angles is 90 degrees
Class Generated Review Sheet for Math 213 Final Key Ideas 9.1 A line segment consists of two point on a plane and all the points in between them. Complementary: The sum of the two angles is 90 degrees
1 Appendix to notes 2, on Hyperbolic geometry:
 1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance.
 Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
COT5405: GEOMETRIC ALGORITHMS
 COT5405: GEOMETRIC ALGORITHMS Objects: Points in, Segments, Lines, Circles, Triangles Polygons, Polyhedra R n Alications Vision, Grahics, Visualizations, Databases, Data mining, Networks, GIS Scientific
COT5405: GEOMETRIC ALGORITHMS Objects: Points in, Segments, Lines, Circles, Triangles Polygons, Polyhedra R n Alications Vision, Grahics, Visualizations, Databases, Data mining, Networks, GIS Scientific
The statement implies that any three intersection points of two distinct planes lie on a line.
 Math 3181 Dr. Franz Rothe February 23, 2015 All3181\3181_spr15ts1.tex 1 Solution of Test Name: Problem 1.1. The second part of Hilbert s Proposition 1 states: Any two different planes have either no point
Math 3181 Dr. Franz Rothe February 23, 2015 All3181\3181_spr15ts1.tex 1 Solution of Test Name: Problem 1.1. The second part of Hilbert s Proposition 1 states: Any two different planes have either no point
Linear Programming in Small Dimensions
 Linear Programming in Small Dimensions Lekcija 7 sergio.cabello@fmf.uni-lj.si FMF Univerza v Ljubljani Edited from slides by Antoine Vigneron Outline linear programming, motivation and definition one dimensional
Linear Programming in Small Dimensions Lekcija 7 sergio.cabello@fmf.uni-lj.si FMF Univerza v Ljubljani Edited from slides by Antoine Vigneron Outline linear programming, motivation and definition one dimensional
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass
 Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Lecture 3. Corner Polyhedron, Intersection Cuts, Maximal Lattice-Free Convex Sets. Tepper School of Business Carnegie Mellon University, Pittsburgh
 Lecture 3 Corner Polyhedron, Intersection Cuts, Maximal Lattice-Free Convex Sets Gérard Cornuéjols Tepper School of Business Carnegie Mellon University, Pittsburgh January 2016 Mixed Integer Linear Programming
Lecture 3 Corner Polyhedron, Intersection Cuts, Maximal Lattice-Free Convex Sets Gérard Cornuéjols Tepper School of Business Carnegie Mellon University, Pittsburgh January 2016 Mixed Integer Linear Programming
Answer Key: Three-Dimensional Cross Sections
 Geometry A Unit Answer Key: Three-Dimensional Cross Sections Name Date Objectives In this lesson, you will: visualize three-dimensional objects from different perspectives be able to create a projection
Geometry A Unit Answer Key: Three-Dimensional Cross Sections Name Date Objectives In this lesson, you will: visualize three-dimensional objects from different perspectives be able to create a projection
3. Voronoi Diagrams. 3.1 Definitions & Basic Properties. Examples :
 3. Voronoi Diagrams Examples : 1. Fire Observation Towers Imagine a vast forest containing a number of fire observation towers. Each ranger is responsible for extinguishing any fire closer to her tower
3. Voronoi Diagrams Examples : 1. Fire Observation Towers Imagine a vast forest containing a number of fire observation towers. Each ranger is responsible for extinguishing any fire closer to her tower
Draw and Classify 3-Dimensional Figures
 Introduction to Three-Dimensional Figures Draw and Classify 3-Dimensional Figures Identify various three-dimensional figures. Course 2 Introduction to Three-Dimensional Figures Insert Lesson Title Here
Introduction to Three-Dimensional Figures Draw and Classify 3-Dimensional Figures Identify various three-dimensional figures. Course 2 Introduction to Three-Dimensional Figures Insert Lesson Title Here
Computational Geometry
 Casting a polyhedron CAD/CAM systems CAD/CAM systems allow you to design objects and test how they can be constructed Many objects are constructed used a mold Casting Casting A general question: Given
Casting a polyhedron CAD/CAM systems CAD/CAM systems allow you to design objects and test how they can be constructed Many objects are constructed used a mold Casting Casting A general question: Given
Intersecting Simple Surfaces. Dr. Scott Schaefer
 Intersecting Simple Surfaces Dr. Scott Schaefer 1 Types of Surfaces Infinite Planes Polygons Convex Ray Shooting Winding Number Spheres Cylinders 2/66 Infinite Planes Defined by a unit normal n and a point
Intersecting Simple Surfaces Dr. Scott Schaefer 1 Types of Surfaces Infinite Planes Polygons Convex Ray Shooting Winding Number Spheres Cylinders 2/66 Infinite Planes Defined by a unit normal n and a point
7. The Gauss-Bonnet theorem
 7. The Gauss-Bonnet theorem 7.1 Hyperbolic polygons In Euclidean geometry, an n-sided polygon is a subset of the Euclidean plane bounded by n straight lines. Thus the edges of a Euclidean polygon are formed
7. The Gauss-Bonnet theorem 7.1 Hyperbolic polygons In Euclidean geometry, an n-sided polygon is a subset of the Euclidean plane bounded by n straight lines. Thus the edges of a Euclidean polygon are formed
PRACTICAL GEOMETRY SYMMETRY AND VISUALISING SOLID SHAPES
 UNIT 12 PRACTICAL GEOMETRY SYMMETRY AND VISUALISING SOLID SHAPES (A) Main Concepts and Results Let a line l and a point P not lying on it be given. By using properties of a transversal and parallel lines,
UNIT 12 PRACTICAL GEOMETRY SYMMETRY AND VISUALISING SOLID SHAPES (A) Main Concepts and Results Let a line l and a point P not lying on it be given. By using properties of a transversal and parallel lines,