Towards A Human-Centered Intrinsically-Safe Robotic Manipulator
|
|
|
- Shauna Osborne
- 6 years ago
- Views:
Transcription
1 Towards A Human-Centered Intrinsically-Safe Robotic Manipulator Michael Zinn 1 Oussama Khatib 2 Bernard Roth 1 and J. Kenneth Salisbury 2 1 Design Division, Department of Mechanical Engineering 2 Robotics Laboratory, Department of Computer Science Stanford University, Stanford, California {zinn, ok, roth, jks}@robotics.stanford.edu Abstract In recent years, many successful robotic manipulator designs have been introduced. However, there remains the challenge of designing a manipulator that possesses the inherent safety characteristics necessary for human-centered robotics. In this paper, we present a new actuation approach that has the requisite characteristics for inherent safety while maintaining the performance expected of modern designs. By drastically reducing the effective impedance of the manipulator while maintaining high frequency torque capability, we show that the competing design requirements of performance and safety can be successfully integrated into a single manipulation system. 1 Introduction In recent years, there has been great interest generated in the emerging fields of service and medical robots. These applications are part of a growing area of human-centered robotics. This area involves the close interaction between robotic manipulation systems and human beings, including direct human-manipulator contact. In such applications, traditional figures of merit such as bandwidth, maximum force and torque capability, and reachable workspace, do not fully encompass the range of metrics which define the requirements of such systems. Specifically, human-centered robotic systems must consider the requirement of safety in addition to the the traditional metrics of performance. Thus, it is the challenge of human-centered robotics to successfully blend often competing requirements of safety and performance. To achieve safety we must employ multiple strategies, involving all aspects of manipulator design including the mechanical, electrical, and software architectures. Immediate improvement can often be realized with the use of electronic hardware and software safety mechanisms which intelligently monitor and control manipulator operations. Additional improvements can be realized in the mechanical design. The elimination of pinch points and sharp edges can eliminate the potential for laceration or abrasion injuries. However, the most serious hazard present when working in close proximity with robotic manipulators is the potential for large impact loads which can result in serious injury or death. To evaluate the potential for serious injury due to impact we can make use of an empirical formula developed by the automotive industry to correlate head acceleration to injury severity known as the Head Injury Criteria (HIC). A simple two degree of freedom mass-spring model can be used to predict head accelerations that would occur during an uncontrolled impact. In combination with the HIC index, the predicted accelerations are used to estimate the likelihood of serious
2 injury occurring during an impact between a robotic manipulator and a human. For the PUMA 560, an impact velocity of one meter per second produces a maximum HIC greater than 500, more than enough to cause injury 1 (see Figure 1). Figure 1: Head injury criteria as a function of effective inertia and interface stiffness As seen in Figure 1, the addition of a compliant covering can reduce impact loading by an order of magnitude or more. However, the amount of compliant material required to reduce impact loads to a safe level can be substantial 2. Clearly, adding large amounts of compliant covering is impractical and does not address the root cause of high impact loads - namely the large effective inertia of most modern robotic arms. This hazard can be somewhat mitigated with the use of software and sensor architectures which monitor and interrupt potential anomalies, and thus reduce the chance of uncontrolled impact. However, even the most robust system is subject to unpredictable behavior as a result of electrical, sensor, or software faults. Thus, the mechanical characteristics of a robotic system are the limiting factor in improving overall safety. The solution to reducing the effective impedance, and thus improve safety, is to build a lightweight, low inertia manipulator. However, previous attempts to build lightweight, low inertia manipulators have been met with limited success. Due to the flexibility of light weight manipulator drive trains and transmissions, control bandwidths are limited. The non-collocated nature of the remotely located actuators limit the tasks that can be achieved to those that require torques whose frequencies lie below the fundamental mode. The effect of this limitation is particularly detrimental to the maximum static stiffness obtainable by the manipulator. As a result, the maximum performance levels attainable are modest at best. More recently, the integration of joint torque control with high performance actu- 1 The HIC index is correlated with the Maximum Abbreviated Injury Scale (MAIS) to provide a mapping from the calculated HIC values to the likelihood of an occurrence of a specific injury severity level. In Figure 1, HIC values and the corresponding likelihood of a concussive injury (or greater) are shown 2 For the PUMA robot, the thickness of a compliant cover required is more than five inches, assuming an impact velocity of 1 meter per second and an allowable maximum HIC index of 100 2

















 DLR II (b) DLR III 2")















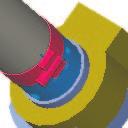
3 ation and lightweight composite structure has brought the competing requirements of safety and performance closer together. Perhaps the most successful of these has been the new DLR lightweight arm design [1] (see Figure 2). The implementation of joint torque control allows for near zero low frequency impedance, which gives the DLR arm excellent force control characteristics. However, above the control bandwidth, joint torque control is ineffective at reducing the impedance of the manipulator. The open loop characteristics of the manipulator and reflected actuator inertia dominate. The magnitude of impact loads, which are determined by the high frequency impedance of the contacting surfaces, are not attenuated. Thus, the challenge of blending the requirements of safety with those performance remains an open problem for the designers of human-centered robotic manipulators. Figure 2: DLR Light Weight Robot (a) DLR II (b) DLR III 2 Towards Achieving Safety and Performance Inherent safety can only be achieved by the reduction of the effective inertia of current manipulators to levels which reduce the maximum collision loads to safe levels. To achieve this we must address the underlying limitations of current robotic actuation technology. Currently, only electro-magnetic, hydraulic, and pneumatic actuators have the power and torque capability required for robotic manipulation tasks. Unfortunately, all of these actuation methods have serious deficiencies, limiting their inherent safety and/or performance characteristics. Hydraulic actuators, which have the highest torque and power density characteristics of any of the actuation methods, are capable of performing tasks which involve the application of thousands of Newton-meters of torque and many kilowatts of power output. However, their very high output stiffness characteristics, which make the hydraulic actuator essentially a pure position source, can render it very dangerous. The output impedance, as compared to the driven manipulator and environment, is virtually infinite, generating very high impact loads during collisions. Thus, hydraulic actuators have very poor inherent safety characteristics. Pneumatic actuators on the other hand can be made very compliant. Due to the near zero inductance of the compressible gas, their output impedance is low over a wide frequency range, reducing uncontrolled impact loads to potentially safe levels. However, pneumatic actuators have very low bandwidth capabilities. Even when pressure con- 3
4 trol is implemented (as opposed to conventional flow control), control bandwidths are limited to less than 20 Hz which is insufficient for high performance tasks [2]. Making matters worse, the slow bandwidth capabilities render the large amount of stored potential energy (in the compressible gas) a serious hazard. Thus, primarily as a result of the limitations of pneumatic and hydraulic actuators, most current human-centered research efforts use manipulation devices that employ electromagnetic actuation as their primary torque source. The primary limitation of electromagnetic motors is their relatively low torque and power density. The use of electromagnetic motors without a torque magnifying reducer is limited to direct drive systems which must employ large DC torque motors which are heavy and inefficient. To increase the torque output to useful levels, gear reducers are almost universally employed when using electromagnetic actuators. Unfortunately, the increase in torque and power density that results must be traded off against the large increase in reflected inertia which increases with the square of the gear reduction. Reduction ratios employed in most systems more than double the effective inertia of the manipulator, reducing safety for the sake of performance. 2.1 New Actuation Approach: Distributed-Parallel Acutation To address the limitations of current actuation technology, we have proposed a new approach that seeks to relocate the major source of actuation effort from the joint to the base of the manipulator [7]. This can substantially reduce the effective inertia of the overall manipulator by isolating the reflected inertia of the actuator while greatly reducing the overall weight of the manipulator. Performance is maintained with small actuators collocated with the joints. Our approach partitions the torque generation into low and high frequency components and distributes these components to the arm location where they are most effective. The overall approach is summarized in Figure 3 The first element of the actuation approach is to divide the torque generation into separate low and high frequency parallel actuators. The effectiveness of this approach can be seen clearly when one considers that most manipulation tasks involve position or force control which are dominated by low frequency trajectory tracking or DC load torques. High frequency torques are almost exclusively used for disturbance rejection. Even haptic device torque profiles, which might require rapid changes approximating a square wave input, have a torque magnitude versus frequency curve that falls off with increasing frequency by 1/ω (see Figure 4). This torque versus frequency profile is ideally fit using a large output, low frequency actuator coupled with a high frequency servomotor. The second element of the actuation approach, which differs from previous attempts at coupled actuation [4], is to distribute the low and high frequency actuators to locations on the manipulator where their effect on contact impedance is minimized while their contribution to control bandwidth is maximized. This is achieved by locating the low frequency torque actuator remotely from the actuated joint. This is particularly advantageous as the low frequency components of most manipulation tasks are considerably larger in magnitude than the high frequency components and consequently require a relatively large actuator. Locating this large actuator at the base significantly reduces the weight and inertia of the manipulator. The high frequency actuators are located at the manipulator joints and connected through a stiff, low friction transmission, providing the high frequency torque components that the low frequency base actuators cannot. The high frequency torque actuator must be connected to the joint inertia through a connection, which produces a high primary mode vibration frequency. By locating the actuator at the joint and by using a low inertia servomotor, we can achieve this high bandwidth connection with a minimum amount of weight and complexity. Finally, an elastic coupling is used to decouple the base actuator inertia from 4







































5 Figure 3: Distributed Elastically Coupled Macro Mini Actuation (DECMMA) 5
6 ω Figure 4: Torque vs frequency: 1 Hz square wave the manipulator and high frequency joint actuator. The elastic coupling reduces the high frequency impedance of the base actuator, preventing the base actuator from interfering with the high frequency operation of the smaller joint actuator while also greatly reducing the reflected inertia as seen by the manipulator. A torque control feedback loop is implemented to further reduced the low frequency impedance of the base actuator while increasing its dynamic range [5, 6]. We refer to the overall approach as Distributed Elastically Coupled Macro Mini Parallel Actuation (DECMMA). The DECMMA approach is analogous to the design of robotic manipulators for use in zero gravity. Under such conditions, gravity induced torques do not exist. Joint actuators provide torques related only to the task, such as trajectory tracking and disturbance rejection, both of which are primarily medium to high frequency in content. We achieve the zero gravity analogy by compensating for gravity torques and low frequency torques using the low frequency actuators located at the base of the manipulator. With the effects of gravity and low frequency torques compensated, joint torque requirements become similar to those encountered by a zero gravity robotic manipulator. However, unlike robotic manipulators designed for space applications, the DECMMA joint actuators do not require a large gear reducer to achieve the required torque and power densities. Thus, the impedance of DECMMA approach is superior to that of current space robotic manipulators. 2.2 Promising Results: Safety and Performance To demonstrate the effectiveness of the DECAMMA approach, we have designed and built a two axis prototype robotic arm which incorporates the important characteristics of the DECMMA approach. The overall design approach is shown in Figure 5. Preliminary experimental and simulation results have demonstrated the effectiveness of the DECMMA approach. The reduction in impact loading by an order of magnitude, as compared to conventional joint actuated manipulators, substantially improves the inherent safety of the manipulator. In the case of a two-axis prototype developed at Stanford, the effective joint inertia was reduced by almost a factor of ten. We can use the effective inertia, graphically illustrated as a belted ellipsoid [3], to calculate the impulse due to impact at any point on the manipulator. To demonstrate the effectiveness of the DECMMA approach in reducing impact loads, Figure 6 shows the normalized impact impulse for two cases of end-point load (P load ) for a two degree of freedom planar manipulator. The impact impulse reduction increases rapidly with increasing load, as the required increase in actuator torque capability affects the reflected inertia of the conventional and cable-driven manipulators while minimally affecting the reflected 6














































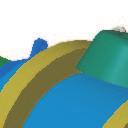



















7 Figure 5: Two Axis DECMMA Prototype inertia of the distributed-parallel approach. While this is just a illustrative example, we see that in combination with a light weight structure and compliant covering, this new actuation approach can be used to design a manipulator that reduces impact loads substantially, thus ensuring inherent safety. In addition to safety, the DECMMA approach, with the introduction of the high frequency joint actuator, has been shown experimentally to improve manipulator performance. Trajectory tracking experiments carried out on the two-axis planar manipulator testbed demonstrate the feasibility of the DECMMA approach. Initial experiments demonstrated a position control bandwidth of approximately 5 Hz as compared to a 2 Hz bandwidth using the base actuator alone (see Figure 7), reducing the position tracking error by more than a factor of ten. Further improvements in performance are expected, as the primary limitation of our two axis testbed was structural resonance in the supporting test stand, which was not a function of the actuation concept. 2.3 DECMMA Implementation Implementation of the DECMMA approach is essentially a trade off between safety, performance, and design complexity. However, this design trade is not necessarily a zero-sum game. Recall that the primary reason for the introduction of of our new actuation approach was to (1) reduce contact impedance and (2) maintain task performance levels. If the task is performed by a manipulator s end effector, then high frequency torque and force capabilities need only be provided at the end effector. As shown in [3], the dynamics of a redundant manipulator is bounded by the dynamics of the outermost degrees of freedom which span the task space. In the case of a redundant manipulation system, such as a dual manipulator - mobile base system depicted in Figure 8, the mobile base degrees of freedom need not employ our new actuation approach to maintain task performance levels which, due to the redundancy of the system, are bounded by the outer six degrees of freedom. Another possible approach is to design the wrist such that required task torques are small, as would be the case for a compact wrist design. In this case, the wrist actuation could be provided by smaller conventional EM actuators. The large DC and low frequency torques provided by the base actuators of the DECMMA approach would not be required. The higher impedance of the wrist actuators would not compromise safety because impact loads would be limited by the inner three degrees of freedom. Thus, our new human friendly actuation approach can be implemented in a manner which maximizes the safety and 7





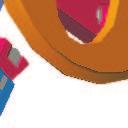
 Comparison of normalized impact impulse load")


8 Figure 6: Comparison of impulse load due to impact for various actuation concepts. (a) Normalized impulse vector: Impulse due to collision of manipulator end effector with rigid object. Impulse magnitude changes with angle due to variation of end-effector effective inertia as a function of impact direction. (b) Normalized impact impulse vs collision velocity direction for various actuation concepts and values of end point load (P load ). (c) Comparison of normalized impact impulse load for various actuation concepts and values of end point load (P load ). Impulse values are normalized by impact velocity and maximum effective inertia. Figure 7: Comparison of position tracking performance using base actuation only with combined base and joint actuation (DECMMA) 8

































































































































































































































































9 Inner DOFs (DECMMA Actuation) Parallel-Distributed Actuation Outer DOFs Single Actuator (Single Actuators) Figure 8: Implementation of Distributed-Parallel Actuation for Multi-DOF Manipulator 9
10 performance characteristics while minimizing the additional complexity associated with the its dual actuation approach. Summary We have presented a new actuation concept for human-friendly robot design, referred to as Distributed Elastically Coupled Macro Mini Actuation (DECMMA). The new concept (DECMMA) was demonstrated on a two degree of freedom prototype robot arm which we designed and built to validate our approach. The new actuation approach substantially reduces the impact loads associated with uncontrolled manipulator collision by relocating the major source of actuation effort from the joint to the base of the manipulator. High frequency torque capability is maintained with the use of small, low inertia servomotors collocated at the joints. The servomotors, integrated with a low reduction, low friction cable transmission, provide the high frequency torque required for high performance tasks while not significantly increasing the combined impedance of the manipulator-actuator system. The low output impedance and complete frequency coverage of the new actuation approach allows the combined manipulator system to approximate a pure torque source. This in turn allows for very good open loop joint torque control over a wide frequency range. Initial experimental and simulation results validate the DECMMA approach. Acknowledgments The authors would like to thank Gunter Neimeyer, Ken Waldron, and Gene Duval for their helpful insights and discussion in preparing this paper. The financial support of NSF grant EIA is gratefully acknowledged. References [1] G. Hirzinger, N. Sporer, A. Albu-Schäffer, M. Hähnle, and A. Pascucci. DLR s torquecontrolled light weight robot iii - are we reaching the technolotical limits now? In Proc. of the Intl. Conf. on Robotics and Automation, pages , [2] John Hollerbach, Ian Hunter, and John Ballantyne. A Comparative Analysis of Actuator Technologies for Robotics, pages MIT Press, [3] Oussama Khatib. Inertial properties in robotic manipulation: An object-level framework. Intl. Journal of Robotics Research, 14(1):19 36, February [4] J.B. Morrel. Parallel Coupled Micro-Macro Actuators. PhD thesis, Massachusetts Institute of Technology, Cambridge, MA, [5] Gill Pratt and Matt Williamson. Series elastic actuators. In Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems, volume 1, pages , [6] David Robinson. Design and Analysis of Series Elasticity in Closed-loop Actuator Force Control. PhD thesis, Massachusetts Institute of Technology, Cambridge, MA, June [7] M. Zinn, O. Khatib, B. Roth, and J.K. Salisbury. A new actuation approach for human friendly robot design. In Proc. of the Intl. Symposium on Experimental Robotics, Sant Angelo d Ischia, Italy,
Torque-Position Transformer for Task Control of Position Controlled Robots
 28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Torque-Position Transformer for Task Control of Position Controlled Robots Oussama Khatib, 1 Peter Thaulad,
28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Torque-Position Transformer for Task Control of Position Controlled Robots Oussama Khatib, 1 Peter Thaulad,
Redundancy Resolution by Minimization of Joint Disturbance Torque for Independent Joint Controlled Kinematically Redundant Manipulators
 56 ICASE :The Institute ofcontrol,automation and Systems Engineering,KOREA Vol.,No.1,March,000 Redundancy Resolution by Minimization of Joint Disturbance Torque for Independent Joint Controlled Kinematically
56 ICASE :The Institute ofcontrol,automation and Systems Engineering,KOREA Vol.,No.1,March,000 Redundancy Resolution by Minimization of Joint Disturbance Torque for Independent Joint Controlled Kinematically
Dynamic Characterization of KUKA Light-Weight Robot Manipulators
 Dynamic Characterization of KUKA Light-Weight Robot Manipulators Technical Report GT-RIM-CR-2012-001 Jacob Huckaby and Henrik I. Christensen Center for Robotics & Intelligent Machines Georgia Institute
Dynamic Characterization of KUKA Light-Weight Robot Manipulators Technical Report GT-RIM-CR-2012-001 Jacob Huckaby and Henrik I. Christensen Center for Robotics & Intelligent Machines Georgia Institute
HEXAPODS FOR PRECISION MOTION AND VIBRATION CONTROL
 HEXAPODS FOR PRECISION MOTION AND VIBRATION CONTROL Eric H. Anderson, Michael F. Cash, Jonathan L. Hall and Gregory W. Pettit CSA Engineering Inc., Mountain View, CA Introduction Parallel kinematic manipulators
HEXAPODS FOR PRECISION MOTION AND VIBRATION CONTROL Eric H. Anderson, Michael F. Cash, Jonathan L. Hall and Gregory W. Pettit CSA Engineering Inc., Mountain View, CA Introduction Parallel kinematic manipulators
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Dynamic Modeling of the 4 DoF BioRob Series Elastic Robot Arm for Simulation and Control
 Dynamic Modeling of the 4 DoF BioRob Series Elastic Robot Arm for Simulation and Control Thomas Lens, Jürgen Kunz, and Oskar von Stryk Simulation, Systems Optimization and Robotics Group, Technische Universität
Dynamic Modeling of the 4 DoF BioRob Series Elastic Robot Arm for Simulation and Control Thomas Lens, Jürgen Kunz, and Oskar von Stryk Simulation, Systems Optimization and Robotics Group, Technische Universität
A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS
 A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS Ahmad Manasra, 135037@ppu.edu.ps Department of Mechanical Engineering, Palestine Polytechnic University, Hebron, Palestine
A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS Ahmad Manasra, 135037@ppu.edu.ps Department of Mechanical Engineering, Palestine Polytechnic University, Hebron, Palestine
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
NOTICE WARNING CONCERNING COPYRIGHT RESTRICTIONS: The copyright law of the United States (title 17, U.S. Code) governs the making of photocopies or
 governs the making of photocopies or") NOTICE WARNING CONCERNING COPYRIGHT RESTRICTIONS: The copyright law of the United States (title 17, U.S. Code) governs the making of photocopies or other reproductions of copyrighted material. Any copying
NOTICE WARNING CONCERNING COPYRIGHT RESTRICTIONS: The copyright law of the United States (title 17, U.S. Code) governs the making of photocopies or other reproductions of copyrighted material. Any copying
Singularity Handling on Puma in Operational Space Formulation
 Singularity Handling on Puma in Operational Space Formulation Denny Oetomo, Marcelo Ang Jr. National University of Singapore Singapore d oetomo@yahoo.com mpeangh@nus.edu.sg Ser Yong Lim Gintic Institute
Singularity Handling on Puma in Operational Space Formulation Denny Oetomo, Marcelo Ang Jr. National University of Singapore Singapore d oetomo@yahoo.com mpeangh@nus.edu.sg Ser Yong Lim Gintic Institute
Design of Direct-Drive Mechanical Arms. Haruhiko Asada and Takeo Kanade CMURITR814
 Design of Direct-Drive Mechanical Arms Haruhiko Asada and Takeo Kanade CMURITR814 Robotics Institute Carnegie-Mellon University Pittsburgh, Pennsylvania 15213 April 28, 1981 Copyright 1981, Carnegie-Mellon
Design of Direct-Drive Mechanical Arms Haruhiko Asada and Takeo Kanade CMURITR814 Robotics Institute Carnegie-Mellon University Pittsburgh, Pennsylvania 15213 April 28, 1981 Copyright 1981, Carnegie-Mellon
Rebecca R. Romatoski. B.S. Mechanical Engineering Massachusetts Institute of Technology, 2006
 Robotic End Effecter for the Introduction to Robotics Laboratory Robotic Arms by Rebecca R. Romatoski B.S. Mechanical Engineering Massachusetts Institute of Technology, 2006 SUBMITTED TO THE DEPARTMENT
Robotic End Effecter for the Introduction to Robotics Laboratory Robotic Arms by Rebecca R. Romatoski B.S. Mechanical Engineering Massachusetts Institute of Technology, 2006 SUBMITTED TO THE DEPARTMENT
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis
 Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Built-in Cable Type Welding Robot "ARCMAN TM -GS"
 Built-in Cable Type Welding Robot "ARCMAN TM -GS" Shuichi INADA *1, Makoto KONDO *1, Yoshihide INOUE *1, Tatsuji MINATO *1, Dr. Yoshiharu NISHIDA *2, Takashi WADA *2 *1 Welding System Dept., Technical
Built-in Cable Type Welding Robot "ARCMAN TM -GS" Shuichi INADA *1, Makoto KONDO *1, Yoshihide INOUE *1, Tatsuji MINATO *1, Dr. Yoshiharu NISHIDA *2, Takashi WADA *2 *1 Welding System Dept., Technical
Assignment 3. Position of the center +/- 0.1 inches Orientation +/- 1 degree. Decal, marker Stereo, matching algorithms Pose estimation
 Assignment 3 1. You are required to analyze the feasibility of designing a vision system for the robot gas station attendant. Assume that the driver parks the car so that the flap and the cap are in a
Assignment 3 1. You are required to analyze the feasibility of designing a vision system for the robot gas station attendant. Assume that the driver parks the car so that the flap and the cap are in a
Written exams of Robotics 2
 Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Manipulator Dynamics: Two Degrees-of-freedom
 Manipulator Dynamics: Two Degrees-of-freedom 2018 Max Donath Manipulator Dynamics Objective: Calculate the torques necessary to overcome dynamic effects Consider 2 dimensional example Based on Lagrangian
Manipulator Dynamics: Two Degrees-of-freedom 2018 Max Donath Manipulator Dynamics Objective: Calculate the torques necessary to overcome dynamic effects Consider 2 dimensional example Based on Lagrangian
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
13. Learning Ballistic Movementsof a Robot Arm 212
 13. Learning Ballistic Movementsof a Robot Arm 212 13. LEARNING BALLISTIC MOVEMENTS OF A ROBOT ARM 13.1 Problem and Model Approach After a sufficiently long training phase, the network described in the
13. Learning Ballistic Movementsof a Robot Arm 212 13. LEARNING BALLISTIC MOVEMENTS OF A ROBOT ARM 13.1 Problem and Model Approach After a sufficiently long training phase, the network described in the
Control strategies for web handling
 Whitepaper Control strategies for web handling PLC, drive and motion-based functionality and architecture usa.siemens.com/converting 2 Control strategies for web handling Table of contents Abstract 3 Overview
Whitepaper Control strategies for web handling PLC, drive and motion-based functionality and architecture usa.siemens.com/converting 2 Control strategies for web handling Table of contents Abstract 3 Overview
Automatic Control Industrial robotics
 Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Mechanical Design Challenges for Collaborative Robots
 Motor Technologies Mechanical Design Challenges for Collaborative Robots TN-3301 REV 170526 THE CHALLENGE Robotics and additive manufacturing markets have entered into a new phase of growth. This growth
Motor Technologies Mechanical Design Challenges for Collaborative Robots TN-3301 REV 170526 THE CHALLENGE Robotics and additive manufacturing markets have entered into a new phase of growth. This growth
STEPPER MOTOR DRIVES SOME FACTORS THAT WILL HELP DETERMINE PROPER SELECTION
 SOME FACTORS THAT WILL HELP DETERMINE PROPER SELECTION Authored By: Robert Pulford and Engineering Team Members Haydon Kerk Motion Solutions This white paper will discuss some methods of selecting the
SOME FACTORS THAT WILL HELP DETERMINE PROPER SELECTION Authored By: Robert Pulford and Engineering Team Members Haydon Kerk Motion Solutions This white paper will discuss some methods of selecting the
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
PRACTICAL SESSION 4: FORWARD DYNAMICS. Arturo Gil Aparicio.
 PRACTICAL SESSION 4: FORWARD DYNAMICS Arturo Gil Aparicio arturo.gil@umh.es OBJECTIVES After this practical session, the student should be able to: Simulate the movement of a simple mechanism using the
PRACTICAL SESSION 4: FORWARD DYNAMICS Arturo Gil Aparicio arturo.gil@umh.es OBJECTIVES After this practical session, the student should be able to: Simulate the movement of a simple mechanism using the
SUPPORTING LINEAR MOTION: A COMPLETE GUIDE TO IMPLEMENTING DYNAMIC LOAD SUPPORT FOR LINEAR MOTION SYSTEMS
 SUPPORTING LINEAR MOTION: A COMPLETE GUIDE TO IMPLEMENTING DYNAMIC LOAD SUPPORT FOR LINEAR MOTION SYSTEMS Released by: Keith Knight Catalyst Motion Group Engineering Team Members info@catalystmotiongroup.com
SUPPORTING LINEAR MOTION: A COMPLETE GUIDE TO IMPLEMENTING DYNAMIC LOAD SUPPORT FOR LINEAR MOTION SYSTEMS Released by: Keith Knight Catalyst Motion Group Engineering Team Members info@catalystmotiongroup.com
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Dual-loop Control for Backlash Correction in Trajectory-tracking of a Planar 3-RRR Manipulator
 Dual-loop Control for Backlash Correction in Trajectory-tracking of a Planar -RRR Manipulator Abhishek Agarwal, Chaman Nasa, Sandipan Bandyopadhyay Abstract The presence of backlash in the gearheads is
Dual-loop Control for Backlash Correction in Trajectory-tracking of a Planar -RRR Manipulator Abhishek Agarwal, Chaman Nasa, Sandipan Bandyopadhyay Abstract The presence of backlash in the gearheads is
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Motion Capture & Simulation
 Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Robotics Laboratory Department of Computer Science Stanford University, Stanford, CA 94086
 Alan Bowling and Oussama Khatib Robotics Laboratory Department of Computer Science Stanford University, Stanford, CA 94086 Abstract This article investigates the problem of robotic manipulator design for
Alan Bowling and Oussama Khatib Robotics Laboratory Department of Computer Science Stanford University, Stanford, CA 94086 Abstract This article investigates the problem of robotic manipulator design for
Development of reconfigurable serial manipulators using parameters based modules
 Development of reconfigurable serial manipulators using parameters based modules Satwinder Singh, Atul Aggarwal, Yogesh Singhal, Ekta Singla Abstract The aim of this paper is to present a modular architecture
Development of reconfigurable serial manipulators using parameters based modules Satwinder Singh, Atul Aggarwal, Yogesh Singhal, Ekta Singla Abstract The aim of this paper is to present a modular architecture
Design of a Three-Axis Rotary Platform
 Design of a Three-Axis Rotary Platform William Mendez, Yuniesky Rodriguez, Lee Brady, Sabri Tosunoglu Mechanics and Materials Engineering, Florida International University 10555 W Flagler Street, Miami,
Design of a Three-Axis Rotary Platform William Mendez, Yuniesky Rodriguez, Lee Brady, Sabri Tosunoglu Mechanics and Materials Engineering, Florida International University 10555 W Flagler Street, Miami,
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Torque Distribution and Slip Minimization in an Omnidirectional Mobile Base
 Torque Distribution and Slip Minimization in an Omnidirectional Mobile Base Yuan Ping Li, Denny Oetomo, Marcelo H. Ang Jr.* National University of Singapore 1 ent Ridge Crescent, Singapore 1196 *mpeangh@nus.edu.sg
Torque Distribution and Slip Minimization in an Omnidirectional Mobile Base Yuan Ping Li, Denny Oetomo, Marcelo H. Ang Jr.* National University of Singapore 1 ent Ridge Crescent, Singapore 1196 *mpeangh@nus.edu.sg
The DLR Lightweight Robot Design and Control Concepts for Robots in Human Environments
 The DLR Lightweight Robot Design and Control Concepts for Robots in Human Environments A. Albu-Schäffer, S. Haddadin, Ch. Ott, A. Stemmer, T. Wimböck, and G. Hirzinger Institute of Robotics and Mechatronics,
The DLR Lightweight Robot Design and Control Concepts for Robots in Human Environments A. Albu-Schäffer, S. Haddadin, Ch. Ott, A. Stemmer, T. Wimböck, and G. Hirzinger Institute of Robotics and Mechatronics,
Mechanical structure of a robot=skeleton of human body Study of structure of a robot=physical structure of the manipulator structure
 UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
Elastic Bands: Connecting Path Planning and Control
 Elastic Bands: Connecting Path Planning and Control Sean Quinlan and Oussama Khatib Robotics Laboratory Computer Science Department Stanford University Abstract Elastic bands are proposed as the basis
Elastic Bands: Connecting Path Planning and Control Sean Quinlan and Oussama Khatib Robotics Laboratory Computer Science Department Stanford University Abstract Elastic bands are proposed as the basis
Defining the Global Error of a Multi-Axis Vibration Test: An Application of MIL-STD-810G Method 527 Annex C
 Defining the Global Error of a Multi-Axis Vibration Test: An Application of MIL-STD-810G Method 527 Annex C Joel Hoksbergen Team Corporation joel.hoksbergen@teamcorporation.com ESTECH 2014 MIMO Concepts
Defining the Global Error of a Multi-Axis Vibration Test: An Application of MIL-STD-810G Method 527 Annex C Joel Hoksbergen Team Corporation joel.hoksbergen@teamcorporation.com ESTECH 2014 MIMO Concepts
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Robotics. SAAST Robotics Robot Arms
 SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps
 Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Design and Control of a Compliant Parallel Manipulator
 University of Pennsylvania ScholarlyCommons Departmental Papers (MEAM) Department of Mechanical Engineering & Applied Mechanics December 2002 Design and Control of a Compliant Parallel Manipulator Thomas
University of Pennsylvania ScholarlyCommons Departmental Papers (MEAM) Department of Mechanical Engineering & Applied Mechanics December 2002 Design and Control of a Compliant Parallel Manipulator Thomas
Development of a Joint Torque Sensor Fully Integrated with an Actuator
 Development of a Joint Torque Sensor Fully Integrated with an Actuator Bong-Seok Kim*, Seung-Kook Yun*, Sung-Chul Kang* Chang-soon Hwang*, Mun-Sang Kim*, and Jae-Bok Song** * Intelligent Robotics Research
Development of a Joint Torque Sensor Fully Integrated with an Actuator Bong-Seok Kim*, Seung-Kook Yun*, Sung-Chul Kang* Chang-soon Hwang*, Mun-Sang Kim*, and Jae-Bok Song** * Intelligent Robotics Research
AC : ADAPTIVE ROBOT MANIPULATORS IN GLOBAL TECHNOLOGY
 AC 2009-130: ADAPTIVE ROBOT MANIPULATORS IN GLOBAL TECHNOLOGY Alireza Rahrooh, University of Central Florida Alireza Rahrooh is aprofessor of Electrical Engineering Technology at the University of Central
AC 2009-130: ADAPTIVE ROBOT MANIPULATORS IN GLOBAL TECHNOLOGY Alireza Rahrooh, University of Central Florida Alireza Rahrooh is aprofessor of Electrical Engineering Technology at the University of Central
Optimal Paint Gun Orientation in Spray Paint Applications Experimental Results
 438 IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING, VOL. 8, NO. 2, APRIL 2011 Optimal Paint Gun Orientation in Spray Paint Applications Experimental Results Pål Johan From, Member, IEEE, Johan
438 IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING, VOL. 8, NO. 2, APRIL 2011 Optimal Paint Gun Orientation in Spray Paint Applications Experimental Results Pål Johan From, Member, IEEE, Johan
DEVELOPMENT OF SUBSTRUCTURED SHAKING TABLE TEST METHOD
 DEVELOPMENT OF SUBSTRUCTURED SHAKING TABLE TEST METHOD Akira IGARASHI 1, Hirokazu IEMURA 2 And Takanori SUWA 3 SUMMARY Since various kinds of issues arise in the practical application of structural response
DEVELOPMENT OF SUBSTRUCTURED SHAKING TABLE TEST METHOD Akira IGARASHI 1, Hirokazu IEMURA 2 And Takanori SUWA 3 SUMMARY Since various kinds of issues arise in the practical application of structural response
Lecture Note 2: Configuration Space
 ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
Modeling of Humanoid Systems Using Deductive Approach
 INFOTEH-JAHORINA Vol. 12, March 2013. Modeling of Humanoid Systems Using Deductive Approach Miloš D Jovanović Robotics laboratory Mihailo Pupin Institute Belgrade, Serbia milos.jovanovic@pupin.rs Veljko
INFOTEH-JAHORINA Vol. 12, March 2013. Modeling of Humanoid Systems Using Deductive Approach Miloš D Jovanović Robotics laboratory Mihailo Pupin Institute Belgrade, Serbia milos.jovanovic@pupin.rs Veljko
1 Trajectories. Class Notes, Trajectory Planning, COMS4733. Figure 1: Robot control system.
 Class Notes, Trajectory Planning, COMS4733 Figure 1: Robot control system. 1 Trajectories Trajectories are characterized by a path which is a space curve of the end effector. We can parameterize this curve
Class Notes, Trajectory Planning, COMS4733 Figure 1: Robot control system. 1 Trajectories Trajectories are characterized by a path which is a space curve of the end effector. We can parameterize this curve
MB Millenium Single- and Multi-Axis Vibration and Motion Control System
 General Overview: The MB Millenium Dynamic Test Controller from MB Dynamics is a multiple-input, multiple-output (MIMO) and/or a multiple-input, single-output (MISO) dynamic test control system. It reliably
General Overview: The MB Millenium Dynamic Test Controller from MB Dynamics is a multiple-input, multiple-output (MIMO) and/or a multiple-input, single-output (MISO) dynamic test control system. It reliably
Line of Sight Stabilization Primer Table of Contents
 Line of Sight Stabilization Primer Table of Contents Preface 1 Chapter 1.0 Introduction 3 Chapter 2.0 LOS Control Architecture and Design 11 2.1 Direct LOS Stabilization 15 2.2 Indirect LOS Stabilization
Line of Sight Stabilization Primer Table of Contents Preface 1 Chapter 1.0 Introduction 3 Chapter 2.0 LOS Control Architecture and Design 11 2.1 Direct LOS Stabilization 15 2.2 Indirect LOS Stabilization
Robots are built to accomplish complex and difficult tasks that require highly non-linear motions.
 Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
ON THE RE-CONFIGURABILITY DESIGN OF PARALLEL MACHINE TOOLS
 33 ON THE RE-CONFIGURABILITY DESIGN OF PARALLEL MACHINE TOOLS Dan Zhang Faculty of Engineering and Applied Science, University of Ontario Institute of Technology Oshawa, Ontario, L1H 7K, Canada Dan.Zhang@uoit.ca
33 ON THE RE-CONFIGURABILITY DESIGN OF PARALLEL MACHINE TOOLS Dan Zhang Faculty of Engineering and Applied Science, University of Ontario Institute of Technology Oshawa, Ontario, L1H 7K, Canada Dan.Zhang@uoit.ca
Cobots
 Cobots http://cobot.com Michael Peshkin J. Edward Colgate Witaya Wannasuphoprasit ( Wit ) Intelligent Assist Devices IADs use computer control of motion to create functionality greater than that of conventional
Cobots http://cobot.com Michael Peshkin J. Edward Colgate Witaya Wannasuphoprasit ( Wit ) Intelligent Assist Devices IADs use computer control of motion to create functionality greater than that of conventional
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Stackable 4-BAR Mechanisms and Their Robotic Applications
 The 010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-, 010, Taipei, Taiwan Stackable 4-BAR Mechanisms and Their Robotic Applications Hoyul Lee and Youngjin Choi Abstract
The 010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-, 010, Taipei, Taiwan Stackable 4-BAR Mechanisms and Their Robotic Applications Hoyul Lee and Youngjin Choi Abstract
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
Simulation in Computer Graphics. Deformable Objects. Matthias Teschner. Computer Science Department University of Freiburg
 Simulation in Computer Graphics Deformable Objects Matthias Teschner Computer Science Department University of Freiburg Outline introduction forces performance collision handling visualization University
Simulation in Computer Graphics Deformable Objects Matthias Teschner Computer Science Department University of Freiburg Outline introduction forces performance collision handling visualization University
Real Time Control of the MIT Vehicle Emulator System
 Proceedings of the 1991 American Control Conference June, 1991, Boston, MA Real Time Control of the MIT Vehicle Emulator System William K. Durfee, Husni R. Idris and Steven Dubowsky Department of Mechanical
Proceedings of the 1991 American Control Conference June, 1991, Boston, MA Real Time Control of the MIT Vehicle Emulator System William K. Durfee, Husni R. Idris and Steven Dubowsky Department of Mechanical
Kinematics and dynamics analysis of micro-robot for surgical applications
 ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 5 (2009) No. 1, pp. 22-29 Kinematics and dynamics analysis of micro-robot for surgical applications Khaled Tawfik 1, Atef A.
ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 5 (2009) No. 1, pp. 22-29 Kinematics and dynamics analysis of micro-robot for surgical applications Khaled Tawfik 1, Atef A.
Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm Yuji
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm Yuji
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Using RecurDyn. Contents
 Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Manipulation and Fluid Power. October 07, 2008
 2008 TE Sessions Supported by Manipulation and Fluid Power October 07, 2008 www.robojackets.org Manipulation Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there?
2008 TE Sessions Supported by Manipulation and Fluid Power October 07, 2008 www.robojackets.org Manipulation Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there?
Compliant Baffle for Large Telescope Daylight Imaging. Stacie Williams Air Force Research Laboratory ABSTRACT
 Compliant Baffle for Large Telescope Daylight Imaging Steven Griffin, Andrew Whiting, Shawn Haar The Boeing Company Stacie Williams Air Force Research Laboratory ABSTRACT With the recent interest in daylight
Compliant Baffle for Large Telescope Daylight Imaging Steven Griffin, Andrew Whiting, Shawn Haar The Boeing Company Stacie Williams Air Force Research Laboratory ABSTRACT With the recent interest in daylight
KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT
 Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
Dynamic Analysis of Manipulator Arm for 6-legged Robot
 American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
Single Actuator Shaker Design to Generate Infinite Spatial Signatures
 2 nd International and 17 th National Conference on Machines and Mechanisms inacomm215-55 Single Actuator Shaker Design to Generate Infinite Spatial Signatures K D Lagoo, T A Dwarakanath and D N Badodkar
2 nd International and 17 th National Conference on Machines and Mechanisms inacomm215-55 Single Actuator Shaker Design to Generate Infinite Spatial Signatures K D Lagoo, T A Dwarakanath and D N Badodkar
SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK
 ABCM Symposium Series in Mechatronics - Vol. 3 - pp.276-285 Copyright c 2008 by ABCM SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK Luiz Ribeiro, ribeiro@ime.eb.br Raul Guenther,
ABCM Symposium Series in Mechatronics - Vol. 3 - pp.276-285 Copyright c 2008 by ABCM SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK Luiz Ribeiro, ribeiro@ime.eb.br Raul Guenther,
Generality and Simple Hands
 Generality and Simple Hands with Grasp Invariance Matthew T. Mason and Alberto Rodriguez February 18, 2011 Outline 1. Overview of Robotics Institute (Mason) 2. Simple hands project (Mason) 3. Grasp invariance
Generality and Simple Hands with Grasp Invariance Matthew T. Mason and Alberto Rodriguez February 18, 2011 Outline 1. Overview of Robotics Institute (Mason) 2. Simple hands project (Mason) 3. Grasp invariance
Robotics 2 Information
 Robotics 2 Information Prof. Alessandro De Luca Robotics 2! 2017/18! Second semester! Monday, February 26 Wednesday, May 30, 2018! Courses of study (code)! Master in Artificial Intelligence and Robotics
Robotics 2 Information Prof. Alessandro De Luca Robotics 2! 2017/18! Second semester! Monday, February 26 Wednesday, May 30, 2018! Courses of study (code)! Master in Artificial Intelligence and Robotics
Module 1 : Introduction to robotics. Lecture 3 : Industrial Manipulators & AGVs. Objectives. History of robots : Main bodies and wrists
 Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Cooperating not-trushting robots
 Cooperating not-trushting robots Ing. Filip Kovář Supervisor: Prof. Ing. Michael Valášek, DrSc. Abstract This paper deals with the simulation of cooperating robots. The tested models are two planar two-arm
Cooperating not-trushting robots Ing. Filip Kovář Supervisor: Prof. Ing. Michael Valášek, DrSc. Abstract This paper deals with the simulation of cooperating robots. The tested models are two planar two-arm
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Trajectory Planning of Redundant Planar Mechanisms for Reducing Task Completion Duration
 Trajectory Planning of Redundant Planar Mechanisms for Reducing Task Completion Duration Emre Uzunoğlu 1, Mehmet İsmet Can Dede 1, Gökhan Kiper 1, Ercan Mastar 2, Tayfun Sığırtmaç 2 1 Department of Mechanical
Trajectory Planning of Redundant Planar Mechanisms for Reducing Task Completion Duration Emre Uzunoğlu 1, Mehmet İsmet Can Dede 1, Gökhan Kiper 1, Ercan Mastar 2, Tayfun Sığırtmaç 2 1 Department of Mechanical
Washability Monitor for Coal Utilizing Optical and X-Ray Analysis Techniques
 Washability Monitor for Coal Utilizing Optical and X-Ray Analysis Techniques Jan F. Bachmann, Claus C. Bachmann, Michael P. Cipold, Helge B. Wurst J&C Bachmann GmbH, Bad Wildbad, Germany Mel J. Laurila
Washability Monitor for Coal Utilizing Optical and X-Ray Analysis Techniques Jan F. Bachmann, Claus C. Bachmann, Michael P. Cipold, Helge B. Wurst J&C Bachmann GmbH, Bad Wildbad, Germany Mel J. Laurila
IDD Aerospace. Cursor Control Device Human Factors and Technology Considerations for Flightdeck Applications
 IDD Aerospace Cursor Control Device Human Factors and Technology Considerations for Flightdeck Applications Doug Daman Copyright 2009 Zodiac Aerospace All Rights Reserved 1 Introduction Competition is
IDD Aerospace Cursor Control Device Human Factors and Technology Considerations for Flightdeck Applications Doug Daman Copyright 2009 Zodiac Aerospace All Rights Reserved 1 Introduction Competition is
A Cryogenic Heat Transport System for Space-Borne Gimbaled Instruments
 A Cryogenic Heat Transport System for Space-Borne Gimbaled Instruments M.V. Zagarola 1, J.K. Sanders 1, and C.S. Kirkconnell 2 1 Creare Inc., Hanover, NH 2 Raytheon Space & Airborne Systems, El Segundo,
A Cryogenic Heat Transport System for Space-Borne Gimbaled Instruments M.V. Zagarola 1, J.K. Sanders 1, and C.S. Kirkconnell 2 1 Creare Inc., Hanover, NH 2 Raytheon Space & Airborne Systems, El Segundo,
MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS
 MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS Finn CONRAD and Francesco ROLI Department of Mechanical Engineering, Technical University
MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS Finn CONRAD and Francesco ROLI Department of Mechanical Engineering, Technical University
17. SEISMIC ANALYSIS MODELING TO SATISFY BUILDING CODES
 17. SEISMIC ANALYSIS MODELING TO SATISFY BUILDING CODES The Current Building Codes Use the Terminology: Principal Direction without a Unique Definition 17.1 INTRODUCTION { XE "Building Codes" }Currently
17. SEISMIC ANALYSIS MODELING TO SATISFY BUILDING CODES The Current Building Codes Use the Terminology: Principal Direction without a Unique Definition 17.1 INTRODUCTION { XE "Building Codes" }Currently
FAB verses tradition camera-based motion capture systems
 FAB verses tradition camera-based motion capture systems The advent of micromachined inertial sensors, such as rate gyroscopes and accelerometers, has made new navigation and tracking technologies possible.
FAB verses tradition camera-based motion capture systems The advent of micromachined inertial sensors, such as rate gyroscopes and accelerometers, has made new navigation and tracking technologies possible.
DESIGN OF 16 ACTUATORS FOR 3D MASSIVE PARALLEL ROBOTS (3D-MPRs)
") DESIGN OF 16 ACTUATORS FOR 3D MASSIVE PARALLEL ROBOTS (3D-MPRs) Felix Pasila, IEEE Member Department of Electrical Engineering Petra Christian University Surabaya, East Java 60236, Indonesia felix@petra.ac.id
DESIGN OF 16 ACTUATORS FOR 3D MASSIVE PARALLEL ROBOTS (3D-MPRs) Felix Pasila, IEEE Member Department of Electrical Engineering Petra Christian University Surabaya, East Java 60236, Indonesia felix@petra.ac.id
Improving Trajectory Tracking Performance of Robotic Manipulator Using Neural Online Torque Compensator
 JOURNAL OF ENGINEERING RESEARCH AND TECHNOLOGY, VOLUME 1, ISSUE 2, JUNE 2014 Improving Trajectory Tracking Performance of Robotic Manipulator Using Neural Online Torque Compensator Mahmoud M. Al Ashi 1,
JOURNAL OF ENGINEERING RESEARCH AND TECHNOLOGY, VOLUME 1, ISSUE 2, JUNE 2014 Improving Trajectory Tracking Performance of Robotic Manipulator Using Neural Online Torque Compensator Mahmoud M. Al Ashi 1,
Static, Modal and Kinematic Analysis of Hydraulic Excavator
 Static, Modal and Kinematic Analysis of Hydraulic Excavator Anil Jadhav Abhijit Kulkarni Tamilnadu,India-632014 Vinayak Kulkarni Prof. Ravi. K Assistant professor Mechanical department Abstract Hydraulic
Static, Modal and Kinematic Analysis of Hydraulic Excavator Anil Jadhav Abhijit Kulkarni Tamilnadu,India-632014 Vinayak Kulkarni Prof. Ravi. K Assistant professor Mechanical department Abstract Hydraulic
Design optimisation of industrial robots using the Modelica multi-physics modeling language
 Design optimisation of industrial robots using the Modelica multi-physics modeling language A. Kazi, G. Merk, M. Otter, H. Fan, (ArifKazi, GuentherMerk)@kuka-roboter.de (Martin.Otter, Hui.Fan)@dlr.de KUKA
Design optimisation of industrial robots using the Modelica multi-physics modeling language A. Kazi, G. Merk, M. Otter, H. Fan, (ArifKazi, GuentherMerk)@kuka-roboter.de (Martin.Otter, Hui.Fan)@dlr.de KUKA
Lecture 2: Kinesthetic haptic devices: design, kinematics and dynamics
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 2: Kinesthetic haptic devices: design, kinematics and dynamics Allison M. Okamura Stanford University kinematics transmission 2 Capstan
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 2: Kinesthetic haptic devices: design, kinematics and dynamics Allison M. Okamura Stanford University kinematics transmission 2 Capstan
Introduction to Real-time Systems. Advanced Operating Systems (M) Lecture 2
 Lecture 2") Introduction to Real-time Systems Advanced Operating Systems (M) Lecture 2 Introduction to Real-time Systems Real-time systems deliver services while meeting some timing constraints Not necessarily fast,
Introduction to Real-time Systems Advanced Operating Systems (M) Lecture 2 Introduction to Real-time Systems Real-time systems deliver services while meeting some timing constraints Not necessarily fast,
Drawing using the Scorbot-ER VII Manipulator Arm
 Drawing using the Scorbot-ER VII Manipulator Arm Luke Cole Adam Ferenc Nagy-Sochacki Jonathan Symonds cole@lc.homedns.org u2546772@anu.edu.au u3970199@anu.edu.au October 29, 2007 Abstract This report discusses
Drawing using the Scorbot-ER VII Manipulator Arm Luke Cole Adam Ferenc Nagy-Sochacki Jonathan Symonds cole@lc.homedns.org u2546772@anu.edu.au u3970199@anu.edu.au October 29, 2007 Abstract This report discusses
Simulink Based Robot Arm Control Workstation. Figure 1-1 High Level Block Diagram
 Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
Jacobians. 6.1 Linearized Kinematics. Y: = k2( e6)
") Jacobians 6.1 Linearized Kinematics In previous chapters we have seen how kinematics relates the joint angles to the position and orientation of the robot's endeffector. This means that, for a serial robot,
Jacobians 6.1 Linearized Kinematics In previous chapters we have seen how kinematics relates the joint angles to the position and orientation of the robot's endeffector. This means that, for a serial robot,
Functional Architectures for Cooperative Multiarm Systems
 Università di Genova - DIST GRAAL- Genoa Robotic And Automation Lab Functional Architectures for Cooperative Multiarm Systems Prof. Giuseppe Casalino Outline A multilayered hierarchical approach to robot
Università di Genova - DIST GRAAL- Genoa Robotic And Automation Lab Functional Architectures for Cooperative Multiarm Systems Prof. Giuseppe Casalino Outline A multilayered hierarchical approach to robot
Research on time optimal trajectory planning of 7-DOF manipulator based on genetic algorithm
 Acta Technica 61, No. 4A/2016, 189 200 c 2017 Institute of Thermomechanics CAS, v.v.i. Research on time optimal trajectory planning of 7-DOF manipulator based on genetic algorithm Jianrong Bu 1, Junyan
Acta Technica 61, No. 4A/2016, 189 200 c 2017 Institute of Thermomechanics CAS, v.v.i. Research on time optimal trajectory planning of 7-DOF manipulator based on genetic algorithm Jianrong Bu 1, Junyan
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics properties and performance measures @ 25 Redundancy first definition McKerrow When a manipulator can reach a specified position with more
Dipartimento di Elettronica Informazione e Bioingegneria Robotics properties and performance measures @ 25 Redundancy first definition McKerrow When a manipulator can reach a specified position with more
SimWise. 3D Dynamic Motion, and Stress Analysis. integrated with Alibre Design
 SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
Research Subject. Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group)
") Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which