Robotic Motion Planning: Bug Algorithms
|
|
|
- Louisa Hall
- 6 years ago
- Views:
Transcription
1 Robotic Motion Planning: Bug Algorithms Robotics Institute Howie Choset
2 What s Special About Bugs Many planning algorithms assume global knowledge Bug algorithms assume only local knowledge of the environment and a global goal Bug behaviors are simple: 1) Follow a wall (right or left) 2) Move in a straight line toward goal Bug 1 and Bug 2 assume essentially tactile sensing Tangent Bug deals with finite distance sensing
3 Bug algorithms * Simple and intuitive Straightforward to implement Success guaranteed (when possible) Assumes perfect positioning and sensing Sensor based planning has to be incremental and reactive *Reference: Principles of Robot Motion. MIT Press. Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki and Sebastian Thrun. Thanks to Howie Choset, CMU, for these slides
4 Assumptions: Bug algorithms Point robot Contact sensor (Bug1,Bug2) or finite range sensor (Tangent Bug) Bounded environment Robot position is perfectly known Robot can measure the distance between two points
5 A Few General Concepts Workspace W R(2) or R(3) depending on the robot could be infinite (open) or bounded (closed/compact) Obstacle WO i Free workspace W free = W \ WO i i
6 The Bug Algorithms provable results... Insect-inspired Start Goal known direction to goal robot can measure distance d(x,y) between pts x and y otherwise local sensing walls/obstacles & encoders reasonable world 1) finitely many obstacles in any finite area 2) a line will intersect an obstacle finitely many times 3) Workspace is bounded W B r (x), r < B r (x) = { y R(2) d(x,y) < r }
7 Buginner Strategy Bug 0 algorithm known direction to goal otherwise local sensing walls/obstacles & encoders Some notation: q start and q goal hit point q H i leave point q L i A path is a sequence of hit/leave pairs bounded by q start and q goal how?
8 Buginner Strategy Bug 0 algorithm known direction to goal otherwise local sensing walls/obstacles & encoders 1) head toward goal 2) follow obstacles until you can head toward the goal again 3) continue path?
9 Buginner Strategy Bug 0 algorithm 1) head toward goal 2) follow obstacles until you can head toward the goal again 3) continue assume a leftturning robot The turning direction might be decided beforehand OK?
10 Bug Zapper What map will foil Bug 0? Bug 0 algorithm 1) head toward goal 2) follow obstacles until you can head toward the goal again 3) continue
11 Bug Zapper What map will foil Bug 0? Bug 0 algorithm 1) head toward goal 2) follow obstacles until you can head toward the goal again goal 3) continue start
12 A better bug? But add some memory! known direction to goal otherwise local sensing walls/obstacles & encoders improvement ideas?
13 Bug 1 But some computing power! known direction to goal otherwise local sensing walls/obstacles & encoders Bug 1 algorithm 1) head toward goal 2) if an obstacle is encountered, circumnavigate it and remember how close you get to the goal 3) return to that closest point (by wall-following) and continue Vladimir Lumelsky & Alexander Stepanov: Algorithmica 1987
14 Bug 1 But some computing power! known direction to goal otherwise local sensing walls/obstacles & encoders Bug 1 algorithm 1) head toward goal 2) if an obstacle is encountered, circumnavigate it and remember how close you get to the goal 3) return to that closest point (by wall-following) and continue Vladimir Lumelsky & Alexander Stepanov: Algorithmica 1987
15 BUG 1 More formally Let q L = q 0 start;i = 1 repeat repeat from q L i-1 move toward q goal until goal is reached or obstacle encountered at q H i if goal is reached, exit repeat follow boundary recording pt q L i until q goal is reached or q H i is re-encountered if goal is reached, exit Go to q L i if move toward q goal moves into obstacle exit with failure else i=i+1 continue with shortest distance to goal
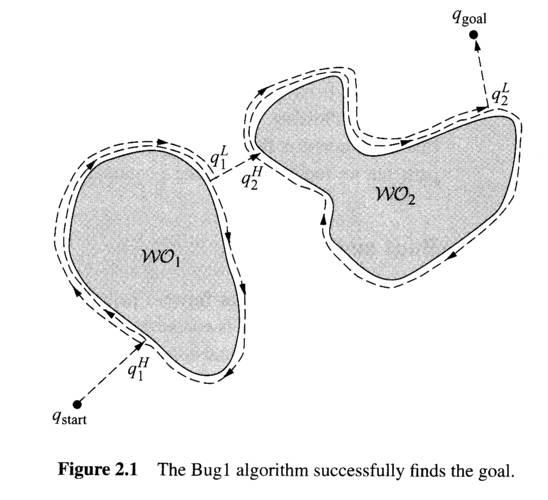
16 Bug1 - example q 2 L q 1 L q 2 H q goal q start q 1 H Motion to goal Boundary following Shortest path to goal
17
18
19 Quiz Bug 1 analysis Bug 1: Path Bounds What are upper/lower bounds on the path length that the robot takes? D = straight-line distance from start to goal P i = perimeter of the i th obstacle Lower bound: What s the shortest distance it might travel? D P 2 Upper bound: What s the longest distance it might travel? P 1 What is an environment where your upper bound is required?
20 Quiz Bug 1 analysis Bug 1: Path Bounds What are upper/lower bounds on the path length that the robot takes? D = straight-line distance from start to goal P i = perimeter of the i th obstacle Lower bound: What s the shortest distance it might travel? D D P 2 Upper bound: What s the longest distance it might travel? D Σ P i i P 1 What is an environment where your upper bound is required?
21 How Can We Show Completeness? An algorithm is complete if, in finite time, it finds a path if such a path exists or terminates with failure if it does not. Suppose BUG1 were incomplete Therefore, there is a path from start to goal By assumption, it is finite length, and intersects obstacles a finite number of times. BUG1 does not find it Either it terminates incorrectly, or, it spends an infinite amount of time Suppose it never terminates but each leave point is closer to the obstacle than corresponding hit point Each hit point is closer than the last leave point Thus, there are a finite number of hit/leave pairs; after exhausting them, the robot will proceed to the goal and terminate Suppose it terminates (incorrectly) Then, the closest point after a hit must be a leave where it would have to move into the obstacle But, then line from robot to goal must intersect object even number of times (Jordan curve theorem) But then there is another intersection point on the boundary closer to object. Since we assumed there is a path, we must have crossed this pt on boundary which contradicts the definition of a leave point.
22 Another step forward? Call the line from the starting point to the goal the m-line Bug 2 Algorithm
23 A better bug? Call the line from the starting point to the goal the m-line Bug 2 Algorithm 1) head toward goal on the m-line
24 A better bug? Call the line from the starting point to the goal the m-line Bug 2 Algorithm 1) head toward goal on the m-line 2) if an obstacle is in the way, follow it until you encounter the m-line again.
25 A better bug? m-line Bug 2 Algorithm 1) head toward goal on the m-line 2) if an obstacle is in the way, follow it until you encounter the m-line again. 3) Leave the obstacle and continue toward the goal OK?
26 A better bug? Bug 2 Algorithm 1) head toward goal on the m-line Start 2) if an obstacle is in the way, follow it until you encounter the m-line again. 3) Leave the obstacle and continue toward the goal Goal NO! How do we fix this?
27 A better bug? Bug 2 Algorithm 1) head toward goal on the m-line Start 2) if an obstacle is in the way, follow it until you encounter the m-line again closer to the goal. 3) Leave the obstacle and continue toward the goal Goal Better or worse than Bug1?
28 Bug2 - example q 2 L q goal q 2 H q 1 L q start q 1 H Motion to goal Boundary following Line connecting start and goal
29
30 BUG 2 More formally Let q L 0 = q start; i = 1 repeat repeat from q L i-1 move toward q goal along the m-line until goal is reached or obstacle encountered at q H i if goal is reached, exit repeat follow boundary until q goal is reached or q H i is re-encountered or m-line is re-encountered, x is not q H i, d(x,q goal ) < d(q H i,q goal ) and way to goal is unimpeded if goal is reached, exit if q H i is reached, return failure else q L i = m i=i+1 continue
31
32 head-to-head comparison or thorax-to-thorax, perhaps Draw worlds in which Bug 2 does better than Bug 1 (and vice versa). Bug 2 beats Bug 1 Bug 1 beats Bug 2
33 head-to-head comparison or thorax-to-thorax, perhaps Draw worlds in which Bug 2 does better than Bug 1 (and vice versa). Bug 2 beats Bug 1 Bug 1 beats Bug 2?
34 head-to-head comparison or thorax-to-thorax, perhaps Draw worlds in which Bug 2 does better than Bug 1 (and vice versa). Bug 2 beats Bug 1 Bug 1 beats Bug 2
35 BUG 1 vs. BUG 2 BUG 1 is an exhaustive search algorithm it looks at all choices before commiting BUG 2 is a greedy algorithm it takes the first thing that looks better In many cases, BUG 2 will outperform BUG 1, but BUG 1 has a more predictable performance overall
36 Quiz Bug 2 analysis Bug 2: Path Bounds What are upper/lower bounds on the path length that the robot takes? D = straight-line distance from start to goal P i = perimeter of the i th obstacle Lower bound: What s the shortest distance it might travel? D Upper bound: What s the longest distance it might travel? What is an environment where your upper bound is required?
37 Quiz Bug 2 analysis Bug 2: Path Bounds What are upper/lower bounds on the path length that the robot takes? D = straight-line distance from start to goal P i = perimeter of the i th obstacle Lower bound: What s the shortest distance it might travel? D Upper bound: What s the longest distance it might travel? D + Σ i n i 2 P i n i = # of m-line intersections of the i th obstacle What is an environment where your upper bound is required?
38 A More Realistic Bug As presented: global beacons plus contact-based wall following The reality: we typically use some sort of range sensing device that lets us look ahead (but has finite resolution and is noisy). Let us assume we have a range sensor

39 Raw Distance Function Saturated raw distance function
40 Tangent Bug Tangent Bug relies on finding endpoints of finite, conts segments of ρ R O 5 x q goal O 1 O 6 O 4 O 2 O 3 Problem: what if this distance starts to go up? Ans: start to act like a BUG and follow boundary
41 Motion-to-Goal Transition from Moving Toward goal to following obstalces Transition Currently, the motion-to-goal behavior thinks the robot can get to the goal
42 Motion-to-Goal Transition Among Moving Toward goal to following obstacles Transition Currently, the motion-to-goal behavior thinks the robot can get to the goal
43 Motion-to-Goal Transition Minimize Heuristic Now, it starts to see something --- what to do? Ans: Choose the pt O i that minimizes d(x,o i ) + d(o i,q goal )
44 Minimize Heuristic Example At x, robot knows only what it sees and where the goal is, so moves toward O 2. Note the line connecting O 2 and goal pass through obstacle so moves toward O 4. Note some thinking was involved and the line connecting O 4 and goal pass through obstacle Choose the pt O i that minimizes d(x,o i ) + d(o i,q goal )
45 Motion To Goal Example Choose the pt O i that minimizes d(x,o i ) + d(o i,q goal )
46 Transition from Motion-to-Goal Choose the pt O i that minimizes d(x,o i ) + d(o i,q goal ) M is the point on the sensed obstacle which has the shorted distance to the goal Problem: what if this distance starts to go up? Ans: start to act like a BUG and follow boundary Followed obstacle: the obstacle that we are currently sensing Blocking obstacle: the obstacle that intersects the segment They start as the same
47 Boundary Following Move toward the O i on the followed obstacle in the chosen direction M is the point on the sensed obstacle which has the shorted distance to the goal Followed obstacle: the obstacle that we are currently sensing Blocking obstacle: the obstacle that intersects the segment Maintain d followed and d reach They start as the same
48 dfollowed and drea d followed is the shortest distance between the sensed boundary and the goal d reach is the shortest distance between blocking obstacle and goal (or my distance to goal if no blocking obstacle visible) Terminate boundary following behavior when d reach < d followed

49 Example: Zero Senor Range 1. Robot moves toward goal until it hits obstacle 1 at H1 2. Pretend there is an infinitely small sensor range and the Oi which minimizes the heuristic is to the right 3. Keep following obstacle until robot can go toward obstacle again 4. Same situation with second obstacle 5. At third obstacle, the robot turned left until it could not increase heuristic 6. Dfollowed is distance between M3 and goal, dreach is distance between robot and goal because sensing distance is zero

50 Example: Finite Sensor Range
51 Example: Infinite Sensor Range
52 Tangent Bug Tangent Bug relies on finding endpoints of finite, conts segments of ρ R T O 5 x q goal O 1 O 6 O 4 O 2 O 3 Now, it starts to see something --- what to do? Ans: Choose the pt O i that minimizes d(x,o i ) + d(o i,q goal ) Heuristic distance
53 The Basic Ideas A motion-to-goal behavior as long as way is clear or there is a visible obstacle boundary pt that decreases heuristic distance A boundary following behavior invoked when heuristic distance increases. A value d followed which is the shortest distance between the sensed boundary and the goal A value d reach which is the shortest distance between blocking obstacle and goal (or my distance to goal if no blocking obstacle visible) Terminate boundary following behavior when d reach < d followed
54 Tangent Bug Algorithm 1) repeat a) Compute continuous range segments in view b) Move toward n {T,O i } that minimizes h(x,n) = d(x,n) + d(n,q goal ) until a) goal is encountered, or b) the value of h(x,n) begins to increase 2) follow boundary continuing in same direction as before repeating a) update {O i }, d reach and d followed until a) goal is reached b) a complete cycle is performed (goal is unreachable) c) d reach < d followed Note the same general proof reasoning as before applies, although the definition of hit and leave points is a little trickier. In the text, d_reach == d_leave and d_followed==d_min
55 Implementing Tangent Bug Basic problem: compute tangent to curve forming boundary of obstacle at any point, and drive the robot in that direction Let D(x) = min c d(x,c) c i WO i Let G(x) = D(x) - W* some safe following distance Note that G(x) points radially away from the object Define T(x) = ( G(x)) the tangent direction in a real sensor (we ll talk about these) this is just the tangent to the array element with lowest reading We could just move in the direction T(x) open-loop control Better is δ x = μ (T(x) - λ ( G(x)) G(x)) closed-loop control (predictor-corrector)






56 Sensors! Robots link to the external world... sonar rangefinder gyro Sensors, sensors, sensors! and tracking what is sensed: world models compass IR rangefinder sonar rangefinder CMU cam with onboard processing odometry




57 Tactile sensors on/off switch as a low-resolution encoder analog input: Active antenna Surface acoustic waves Capacitive array sensors Resistive sensors 100% of light passes through , Howie Choset 90% with of slides light from passes G.D. through Hager and Z. Dodds 75% of light passes through




58 Tactile applications Medical teletaction interfaces haptics davinci medical system Robotic sensing Merritt systems, FL

 sensing is based on angle")
59 Infrared sensors Noncontact bump sensor (1) sensing is based on light intensity. object-sensing IR looks for changes at this distance diffuse distance-sensing IR (2) sensing is based on angle receved. IR emitter/detector pair IR detector
60 InfraRed (IR) Distance Sensor The IR beam causes a particular pixel in the linear CCD array to give maximum response (peak). The distance can then be computed By triangulation Distance D4 D3 D2 D1 Linear CCD array IR Beam Optical Center

")

61 Infrared calibration The response to white copy paper (a dull, reflective surface) raw values (put into 4 bits) inches 15º increments in the dark fluorescent light incandescent light
62 Infrared calibration energy vs. distance for various materials ( the incident angle is 0º, or head-on ) ( with no ambient light )


63 Sonar sensing single-transducer sonar timeline 0 a chirp is emitted into the environment 75μs typically when reverberations from the initial chirp have stopped the transducer goes into receiving mode and awaits a signal... limiting range sensing.5s after a short time, the signal will be too weak to be detected time response blanking time Polaroid sonar emitter/receivers No lower range limit for paired sonars...
64 walls (obstacles) Sonar effects sonar Draw the range reading that the sonar will return in each case
65 walls (obstacles) Sonar effects sonar Draw the range reading that the sonar will return in each case holding a sponge
66 Sonar effects (a) Sonar providing an accurate range measurement (b-c) Lateral resolution is not very precise; the closest object in the beam s cone provides the response (d) Specular reflections cause walls to disappear (e) Open corners produce a weak spherical wavefront (f) Closed corners measure to the corner itself because of multiple reflections --> sonar ray tracing resolution: time / space

67 Sonar modeling initial time response accumulated responses blanking time cone width spatial response
68 Summary Bug 1: safe and reliable Bug 2: better in some cases; worse in others Should understand the basic completeness proof Tangent Bug: supports range sensing Sensors and control should understand basic concepts and know what different sensors are
Robotic Motion Planning: Bug Algorithms
 Robotic Motion Planning: Bug Algorithms Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset What s Special About Bugs Many planning algorithms
Robotic Motion Planning: Bug Algorithms Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset What s Special About Bugs Many planning algorithms
What s Special About Bugs
 Robotic Motion Planning: Bug Algorithms University of Denver ENCE 4800 Richard Voyles What s Special About Bugs Many planning algorithms assume global knowledge Bug algorithms assume only local knowledge
Robotic Motion Planning: Bug Algorithms University of Denver ENCE 4800 Richard Voyles What s Special About Bugs Many planning algorithms assume global knowledge Bug algorithms assume only local knowledge
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.ceng.metu.edu.tr/~saranli/courses/ceng786 Lecture 2 Bug Algorithms Uluç Saranlı http://www.ceng.metu.edu.tr/~saranli CENG786 - Robot Motion Control and Planning
Robot Motion Control and Planning http://www.ceng.metu.edu.tr/~saranli/courses/ceng786 Lecture 2 Bug Algorithms Uluç Saranlı http://www.ceng.metu.edu.tr/~saranli CENG786 - Robot Motion Control and Planning
Robotic Motion Planning: Bug Algorithms (with some discussion on curve tracing and sensors)
") Robotic Motion Planning: Bug Algorithms (with some discussion on curve tracing and sensors) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Robotic Motion Planning: Bug Algorithms (with some discussion on curve tracing and sensors) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Path Planning. Ioannis Rekleitis
 Path Planning Ioannis Rekleitis Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2 Mo+on Planning The ability to go from A to B
Path Planning Ioannis Rekleitis Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2 Mo+on Planning The ability to go from A to B
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Robotics Navigation I: Bug Algorithms
 Robotics Navigation I: Bug Algorithms Admin Any? Lab? Bug Algorithms Bug Algorithms Behavioral roboticists love(d) insects Simple behaviors easy to implement Complex emergent behaviors So first navigation
Robotics Navigation I: Bug Algorithms Admin Any? Lab? Bug Algorithms Bug Algorithms Behavioral roboticists love(d) insects Simple behaviors easy to implement Complex emergent behaviors So first navigation
Perception: Sensors. Autonomous Mobile Robots. Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart
 ASL Autonomous Systems Lab Perception: Sensors Autonomous Mobile Robots Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart Autonomous Mobile Robots Margarita Chli, Paul Furgale,
ASL Autonomous Systems Lab Perception: Sensors Autonomous Mobile Robots Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart Autonomous Mobile Robots Margarita Chli, Paul Furgale,
Robotics course student reading and in-class presentation
 Robotics course student reading and in-class presentation Purpose: Learn how to research for information about robotics projects. Search web, library books and research papers Skim through many pages.
Robotics course student reading and in-class presentation Purpose: Learn how to research for information about robotics projects. Search web, library books and research papers Skim through many pages.
Robotic Motion Planning: Cell Decompositions (with some discussion on coverage and pursuer/evader)
") Robotic Motion Planning: Cell Decompositions (with some discussion on coverage and pursuer/evader) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Robotic Motion Planning: Cell Decompositions (with some discussion on coverage and pursuer/evader) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Mobile Robots: An Introduction.
 Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Principles of Robot Motion
 Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
Motion Planning, Part IV Graph Search Part II. Howie Choset
 Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Beyond A*: Speeding up pathfinding through hierarchical abstraction. Daniel Harabor NICTA & The Australian National University
 Beyond A*: Speeding up pathfinding through hierarchical abstraction Daniel Harabor NICTA & The Australian National University Motivation Myth: Pathfinding is a solved problem. Motivation Myth: Pathfinding
Beyond A*: Speeding up pathfinding through hierarchical abstraction Daniel Harabor NICTA & The Australian National University Motivation Myth: Pathfinding is a solved problem. Motivation Myth: Pathfinding
Robotic Motion Planning: A* and D* Search
 Robotic Motion Planning: A* and D* Search Robotics Institute 6-75 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset 6-75, Howie Choset with slides from G. Ayorker
Robotic Motion Planning: A* and D* Search Robotics Institute 6-75 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset 6-75, Howie Choset with slides from G. Ayorker
Optics: Laser Light Show Student Advanced Version
 Optics: Laser Light Show Student Advanced Version In this lab, you will explore the behavior of light. You will observe reflection and refraction of a laser beam in jello, and use a diffraction pattern
Optics: Laser Light Show Student Advanced Version In this lab, you will explore the behavior of light. You will observe reflection and refraction of a laser beam in jello, and use a diffraction pattern
Optics II. Reflection and Mirrors
 Optics II Reflection and Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media The
Optics II Reflection and Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media The
NAVIGATION USING A RADAR SENSOR IN USARSIM
 NAVIGATION USING A RADAR SENSOR IN USARSIM Navigation using a radar sensor in USARSim Richard Rozeboom 6173292 Bachelor thesis Credits: 18 EC Bachelor Opleiding Kunstmatige Intelligentie University of
NAVIGATION USING A RADAR SENSOR IN USARSIM Navigation using a radar sensor in USARSim Richard Rozeboom 6173292 Bachelor thesis Credits: 18 EC Bachelor Opleiding Kunstmatige Intelligentie University of
Tangent Bug Algorithm Based Path Planning of Mobile Robot for Material Distribution Task in Manufacturing Environment through Image Processing
 ISSN:1991-8178 Australian Journal of Basic and Applied Sciences Journal home page: www.ajbasweb.com Tangent Bug Algorithm Based Path Planning of Mobile Robot for Material Distribution Task in Manufacturing
ISSN:1991-8178 Australian Journal of Basic and Applied Sciences Journal home page: www.ajbasweb.com Tangent Bug Algorithm Based Path Planning of Mobile Robot for Material Distribution Task in Manufacturing
Road Map Methods. Including material from Howie Choset / G.D. Hager S. Leonard
 Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
3 Interactions of Light Waves
 CHAPTER 22 3 Interactions of Light Waves SECTION The Nature of Light BEFORE YOU READ After you read this section, you should be able to answer these questions: How does reflection affect the way we see
CHAPTER 22 3 Interactions of Light Waves SECTION The Nature of Light BEFORE YOU READ After you read this section, you should be able to answer these questions: How does reflection affect the way we see
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University. Course Logistics. Instructor: Jingjin Yu
 CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Course Logistics Instructor: Jingjin Yu Logistics, etc. General Lectures: Noon-1:20pm Tuesdays and Fridays, SEC 118 Instructor:
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Course Logistics Instructor: Jingjin Yu Logistics, etc. General Lectures: Noon-1:20pm Tuesdays and Fridays, SEC 118 Instructor:
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Local Illumination. CMPT 361 Introduction to Computer Graphics Torsten Möller. Machiraju/Zhang/Möller
 Local Illumination CMPT 361 Introduction to Computer Graphics Torsten Möller Graphics Pipeline Hardware Modelling Transform Visibility Illumination + Shading Perception, Interaction Color Texture/ Realism
Local Illumination CMPT 361 Introduction to Computer Graphics Torsten Möller Graphics Pipeline Hardware Modelling Transform Visibility Illumination + Shading Perception, Interaction Color Texture/ Realism
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Physics Themed 1516 Williams. Mirrors & Reflective Optics
 Physics Themed 1516 Williams Mirrors & Reflective Optics 1 2 Flat Ray Tracing Exercise The black dot represents where an image from the "tip of the flickering flame" would appear to be to any observer
Physics Themed 1516 Williams Mirrors & Reflective Optics 1 2 Flat Ray Tracing Exercise The black dot represents where an image from the "tip of the flickering flame" would appear to be to any observer
Reflection & Mirrors
 Reflection & Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media A ray of light is
Reflection & Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media A ray of light is
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Physics 1230: Light and Color. Projects
 Physics 1230: Light and Color Chuck Rogers, Charles.Rogers@colorado.edu Matt Heinemann, Matthew.Heinemann@colorado.edu www.colorado.edu/physics/phys1230 Exam 2 tomorrow, here. HWK 6 is due at 5PM Thursday.
Physics 1230: Light and Color Chuck Rogers, Charles.Rogers@colorado.edu Matt Heinemann, Matthew.Heinemann@colorado.edu www.colorado.edu/physics/phys1230 Exam 2 tomorrow, here. HWK 6 is due at 5PM Thursday.
LME Software Block Quick Reference 1. Common Palette
 LME Software Block Quick Reference Common Palette Move Block Use this block to set your robot to go forwards or backwards in a straight line or to turn by following a curve. Define how far your robot will
LME Software Block Quick Reference Common Palette Move Block Use this block to set your robot to go forwards or backwards in a straight line or to turn by following a curve. Define how far your robot will
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
Ray Optics. Lecture 23. Chapter 34. Physics II. Course website:
 Lecture 23 Chapter 34 Physics II Ray Optics Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsii Today we are going to discuss: Chapter 34: Section 34.1-3 Ray Optics Ray Optics Wave
Lecture 23 Chapter 34 Physics II Ray Optics Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsii Today we are going to discuss: Chapter 34: Section 34.1-3 Ray Optics Ray Optics Wave
Topic 9: Wave phenomena - AHL 9.2 Single-slit diffraction
 Topic 9.2 is an extension of Topic 4.4. Both single and the double-slit diffraction were considered in 4.4. Essential idea: Single-slit diffraction occurs when a wave is incident upon a slit of approximately
Topic 9.2 is an extension of Topic 4.4. Both single and the double-slit diffraction were considered in 4.4. Essential idea: Single-slit diffraction occurs when a wave is incident upon a slit of approximately
Cognitive Robotics Robot Motion Planning Matteo Matteucci
 Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Ch. 22 Properties of Light HW# 1, 5, 7, 9, 11, 15, 19, 22, 29, 37, 38
 Ch. 22 Properties of Light HW# 1, 5, 7, 9, 11, 15, 19, 22, 29, 37, 38 Brief History of the Nature of Light Up until 19 th century, light was modeled as a stream of particles. Newton was a proponent of
Ch. 22 Properties of Light HW# 1, 5, 7, 9, 11, 15, 19, 22, 29, 37, 38 Brief History of the Nature of Light Up until 19 th century, light was modeled as a stream of particles. Newton was a proponent of
Huygens and Fermat s s principles (Textbook 4.4, 4.5) Application to reflection & refraction at an interface
 Application to reflection & refraction at an interface") Huygens and Fermat s s principles (Textbook 4.4, 4.5) Application to reflection & refraction at an interface 1 Propagation of light: Sources E.g. point source a fundamental source Light is emitted in all
Huygens and Fermat s s principles (Textbook 4.4, 4.5) Application to reflection & refraction at an interface 1 Propagation of light: Sources E.g. point source a fundamental source Light is emitted in all
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Robotic Motion Planning: Review C-Space and Start Potential Functions
 Robotic Motion Planning: Review C-Space and Start Potential Functions Robotics Institute 16-735 http://www.cs.cmu.edu/~motionplanning Howie Choset http://www.cs.cmu.edu/~choset What if the robot is not
Robotic Motion Planning: Review C-Space and Start Potential Functions Robotics Institute 16-735 http://www.cs.cmu.edu/~motionplanning Howie Choset http://www.cs.cmu.edu/~choset What if the robot is not
Physics 101, Lab 1: LINEAR KINEMATICS PREDICTION SHEET
 Physics 101, Lab 1: LINEAR KINEMATICS PREDICTION SHEET After reading through the Introduction, Purpose and Principles sections of the lab manual (and skimming through the procedures), answer the following
Physics 101, Lab 1: LINEAR KINEMATICS PREDICTION SHEET After reading through the Introduction, Purpose and Principles sections of the lab manual (and skimming through the procedures), answer the following
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
LECTURE 37: Ray model of light and Snell's law
 Lectures Page 1 Select LEARNING OBJECTIVES: LECTURE 37: Ray model of light and Snell's law Understand when the ray model of light is applicable. Be able to apply Snell's Law of Refraction to any system.
Lectures Page 1 Select LEARNING OBJECTIVES: LECTURE 37: Ray model of light and Snell's law Understand when the ray model of light is applicable. Be able to apply Snell's Law of Refraction to any system.
Index of Refraction and Total Internal Reflection
 Index of Refraction and Total Internal Reflection Name: Group Members: Date: TA s Name: Materials: Ray box, two different transparent blocks, two letter size white pages, pencil, protractor, two nails,
Index of Refraction and Total Internal Reflection Name: Group Members: Date: TA s Name: Materials: Ray box, two different transparent blocks, two letter size white pages, pencil, protractor, two nails,
Outline Sensors. EE Sensors. H.I. Bozma. Electric Electronic Engineering Bogazici University. December 13, 2017
 Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Introduction to Robotics
 Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Department Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du
Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Department Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Optics INTRODUCTION DISCUSSION OF PRINCIPLES. Reflection by a Plane Mirror
 Optics INTRODUCTION Geometric optics is one of the oldest branches of physics, dealing with the laws of reflection and refraction. Reflection takes place on the surface of an object, and refraction occurs
Optics INTRODUCTION Geometric optics is one of the oldest branches of physics, dealing with the laws of reflection and refraction. Reflection takes place on the surface of an object, and refraction occurs
Reflection and Refraction of Light
 PC1222 Fundamentals of Physics II Reflection and Refraction of Light 1 Objectives Investigate for reflection of rays from a plane surface, the dependence of the angle of reflection on the angle of incidence.
PC1222 Fundamentals of Physics II Reflection and Refraction of Light 1 Objectives Investigate for reflection of rays from a plane surface, the dependence of the angle of reflection on the angle of incidence.
ROBOTICS AND AUTONOMOUS SYSTEMS
 ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 6 PERCEPTION/ODOMETRY comp329-2013-parsons-lect06 2/43 Today We ll talk about perception and
ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 6 PERCEPTION/ODOMETRY comp329-2013-parsons-lect06 2/43 Today We ll talk about perception and
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Simon Parsons Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Simon Parsons Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Refraction at a single curved spherical surface
 Refraction at a single curved spherical surface This is the beginning of a sequence of classes which will introduce simple and complex lens systems We will start with some terminology which will become
Refraction at a single curved spherical surface This is the beginning of a sequence of classes which will introduce simple and complex lens systems We will start with some terminology which will become
Motion Planning, Part III Graph Search, Part I. Howie Choset
 Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Ray Optics I. Last time, finished EM theory Looked at complex boundary problems TIR: Snell s law complex Metal mirrors: index complex
 Phys 531 Lecture 8 20 September 2005 Ray Optics I Last time, finished EM theory Looked at complex boundary problems TIR: Snell s law complex Metal mirrors: index complex Today shift gears, start applying
Phys 531 Lecture 8 20 September 2005 Ray Optics I Last time, finished EM theory Looked at complex boundary problems TIR: Snell s law complex Metal mirrors: index complex Today shift gears, start applying
Experiment 8 Wave Optics
 Physics 263 Experiment 8 Wave Optics In this laboratory, we will perform two experiments on wave optics. 1 Double Slit Interference In two-slit interference, light falls on an opaque screen with two closely
Physics 263 Experiment 8 Wave Optics In this laboratory, we will perform two experiments on wave optics. 1 Double Slit Interference In two-slit interference, light falls on an opaque screen with two closely
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Springer-Vcrlag New York Inc.
 S Algorithmica (1987) 2: 403-430 ~lgorithmica @ 1987 Springer-Vcrlag New York Inc. Path-Planning Strategies for a Point Mobile Automaton Moving Amidst Unknown Obstacles of Arbitrary Shape1 Vladimir J.
S Algorithmica (1987) 2: 403-430 ~lgorithmica @ 1987 Springer-Vcrlag New York Inc. Path-Planning Strategies for a Point Mobile Automaton Moving Amidst Unknown Obstacles of Arbitrary Shape1 Vladimir J.
Navigation and Metric Path Planning
 Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Physics 1202: Lecture 17 Today s Agenda
 Physics 1202: Lecture 17 Today s Agenda Announcements: Team problems today Team 10, 11 & 12: this Thursday Homework #8: due Friday Midterm 2: Tuesday April 10 Office hours if needed (M-2:30-3:30 or TH
Physics 1202: Lecture 17 Today s Agenda Announcements: Team problems today Team 10, 11 & 12: this Thursday Homework #8: due Friday Midterm 2: Tuesday April 10 Office hours if needed (M-2:30-3:30 or TH
PHY 112: Light, Color and Vision. Lecture 11. Prof. Clark McGrew Physics D 134. Review for Exam. Lecture 11 PHY 112 Lecture 1
 PHY 112: Light, Color and Vision Lecture 11 Prof. Clark McGrew Physics D 134 Review for Exam Lecture 11 PHY 112 Lecture 1 From Last Time Lenses Ray tracing a Convex Lens Announcements The midterm is Thursday
PHY 112: Light, Color and Vision Lecture 11 Prof. Clark McGrew Physics D 134 Review for Exam Lecture 11 PHY 112 Lecture 1 From Last Time Lenses Ray tracing a Convex Lens Announcements The midterm is Thursday
LECTURE 11 REFLECTION & PLANE MIRRORS. Instructor: Kazumi Tolich
 LECTURE 11 REFLECTION & PLANE MIRRORS Instructor: Kazumi Tolich Lecture 11 2 Reading chapter 26.1 to 26.2 Wave fronts and rays The law of reflection Plane mirrors Wave fronts 3 The wave crests from spherical
LECTURE 11 REFLECTION & PLANE MIRRORS Instructor: Kazumi Tolich Lecture 11 2 Reading chapter 26.1 to 26.2 Wave fronts and rays The law of reflection Plane mirrors Wave fronts 3 The wave crests from spherical
mywbut.com Diffraction
 Diffraction If an opaque obstacle (or aperture) is placed between a source of light and screen, a sufficiently distinct shadow of opaque (or an illuminated aperture) is obtained on the screen.this shows
Diffraction If an opaque obstacle (or aperture) is placed between a source of light and screen, a sufficiently distinct shadow of opaque (or an illuminated aperture) is obtained on the screen.this shows
Physics 9 Friday, September 28, 2018
 Physics 9 Friday, September 28, 2018 Turn in HW#3. HW#4 will be due two weeks from today; I will hand out HW#4 Monday. I found a way to run both Odeon and CATT-Acoustic on MacOS without a virtual machine!
Physics 9 Friday, September 28, 2018 Turn in HW#3. HW#4 will be due two weeks from today; I will hand out HW#4 Monday. I found a way to run both Odeon and CATT-Acoustic on MacOS without a virtual machine!
MOBILE ROBOTS NAVIGATION, MAPPING & LOCALIZATION: PART I
 MOBILE ROBOTS NAVIGATION, MAPPING & LOCALIZATION: PART I Lee Gim Hee* CML DSO National Laboratories 20 Science Park Drive Singapore 118230 Tel: (+65) 6796 8427 Email: lgimhee@dso.org.sg Marcelo H. Ang
MOBILE ROBOTS NAVIGATION, MAPPING & LOCALIZATION: PART I Lee Gim Hee* CML DSO National Laboratories 20 Science Park Drive Singapore 118230 Tel: (+65) 6796 8427 Email: lgimhee@dso.org.sg Marcelo H. Ang
Geographical routing 1
 Geographical routing 1 Routing in ad hoc networks Obtain route information between pairs of nodes wishing to communicate. Proactive protocols: maintain routing tables at each node that is updated as changes
Geographical routing 1 Routing in ad hoc networks Obtain route information between pairs of nodes wishing to communicate. Proactive protocols: maintain routing tables at each node that is updated as changes
Lecture Ray Model of Light. Physics Help Q&A: tutor.leiacademy.org
 Lecture 1201 Ray Model of Light Physics Help Q&A: tutor.leiacademy.org Reflection of Light A ray of light, the incident ray, travels in a medium. When it encounters a boundary with a second medium, part
Lecture 1201 Ray Model of Light Physics Help Q&A: tutor.leiacademy.org Reflection of Light A ray of light, the incident ray, travels in a medium. When it encounters a boundary with a second medium, part
Lecture Outlines Chapter 26
 Lecture Outlines Chapter 26 11/18/2013 2 Chapter 26 Geometrical Optics Objectives: After completing this module, you should be able to: Explain and discuss with diagrams, reflection and refraction of light
Lecture Outlines Chapter 26 11/18/2013 2 Chapter 26 Geometrical Optics Objectives: After completing this module, you should be able to: Explain and discuss with diagrams, reflection and refraction of light
LIGHT: Two-slit Interference
 LIGHT: Two-slit Interference Objective: To study interference of light waves and verify the wave nature of light. Apparatus: Two red lasers (wavelength, λ = 633 nm); two orange lasers (λ = 612 nm); two
LIGHT: Two-slit Interference Objective: To study interference of light waves and verify the wave nature of light. Apparatus: Two red lasers (wavelength, λ = 633 nm); two orange lasers (λ = 612 nm); two
Lecture 14: Refraction
 Lecture 14: Refraction We know from experience that there are several transparent substances through which light can travel air, water, and glass are three examples When light passes from one such medium
Lecture 14: Refraction We know from experience that there are several transparent substances through which light can travel air, water, and glass are three examples When light passes from one such medium
Ch. 25 The Reflection of Light
 Ch. 25 The Reflection of Light 25. Wave fronts and rays We are all familiar with mirrors. We see images because some light is reflected off the surface of the mirror and into our eyes. In order to describe
Ch. 25 The Reflection of Light 25. Wave fronts and rays We are all familiar with mirrors. We see images because some light is reflected off the surface of the mirror and into our eyes. In order to describe
Calypso Construction Features. Construction Features 1
 Calypso 1 The Construction dropdown menu contains several useful construction features that can be used to compare two other features or perform special calculations. Construction features will show up
Calypso 1 The Construction dropdown menu contains several useful construction features that can be used to compare two other features or perform special calculations. Construction features will show up
Problem Set 4 Part 1 CMSC 427 Distributed: Thursday, November 1, 2007 Due: Tuesday, November 20, 2007
 Problem Set 4 Part 1 CMSC 427 Distributed: Thursday, November 1, 2007 Due: Tuesday, November 20, 2007 Programming For this assignment you will write a simple ray tracer. It will be written in C++ without
Problem Set 4 Part 1 CMSC 427 Distributed: Thursday, November 1, 2007 Due: Tuesday, November 20, 2007 Programming For this assignment you will write a simple ray tracer. It will be written in C++ without
Mathematical and Algorithmic Foundations Linear Programming and Matchings
 Adavnced Algorithms Lectures Mathematical and Algorithmic Foundations Linear Programming and Matchings Paul G. Spirakis Department of Computer Science University of Patras and Liverpool Paul G. Spirakis
Adavnced Algorithms Lectures Mathematical and Algorithmic Foundations Linear Programming and Matchings Paul G. Spirakis Department of Computer Science University of Patras and Liverpool Paul G. Spirakis
Light and the Properties of Reflection & Refraction
 Light and the Properties of Reflection & Refraction OBJECTIVE To study the imaging properties of a plane mirror. To prove the law of reflection from the previous imaging study. To study the refraction
Light and the Properties of Reflection & Refraction OBJECTIVE To study the imaging properties of a plane mirror. To prove the law of reflection from the previous imaging study. To study the refraction
Assignment 1: Control and obstacle avoidance
 Assignment 1: Control and obstacle avoidance ETH Zurich Individual Demonstration: Thursday, 08.10.2015 at 15:15 Individual Software Due: Thursday, 08.10.2015 at 23:00 Group Work Demonstration: Monday,
Assignment 1: Control and obstacle avoidance ETH Zurich Individual Demonstration: Thursday, 08.10.2015 at 15:15 Individual Software Due: Thursday, 08.10.2015 at 23:00 Group Work Demonstration: Monday,
Chapter 12 Notes: Optics
 Chapter 12 Notes: Optics How can the paths traveled by light rays be rearranged in order to form images? In this chapter we will consider just one form of electromagnetic wave: visible light. We will be
Chapter 12 Notes: Optics How can the paths traveled by light rays be rearranged in order to form images? In this chapter we will consider just one form of electromagnetic wave: visible light. We will be
Stereo imaging ideal geometry
 Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Obstacle Avoidance (Local Path Planning)
") Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Physics 202, Lecture 23
 Physics 202, Lecture 23 Today s Topics Lights and Laws of Geometric Optics Nature of Light Reflection and Refraction Law of Reflection Law of Refraction Index of Reflection, Snell s Law Total Internal
Physics 202, Lecture 23 Today s Topics Lights and Laws of Geometric Optics Nature of Light Reflection and Refraction Law of Reflection Law of Refraction Index of Reflection, Snell s Law Total Internal
Chapter 8: Physical Optics
 Chapter 8: Physical Optics Whether light is a particle or a wave had puzzled physicists for centuries. In this chapter, we only analyze light as a wave using basic optical concepts such as interference
Chapter 8: Physical Optics Whether light is a particle or a wave had puzzled physicists for centuries. In this chapter, we only analyze light as a wave using basic optical concepts such as interference
Phys 102 Lecture 17 Introduction to ray optics
 Phys 102 Lecture 17 Introduction to ray optics 1 Physics 102 lectures on light Light as a wave Lecture 15 EM waves Lecture 16 Polarization Lecture 22 & 23 Interference & diffraction Light as a ray Lecture
Phys 102 Lecture 17 Introduction to ray optics 1 Physics 102 lectures on light Light as a wave Lecture 15 EM waves Lecture 16 Polarization Lecture 22 & 23 Interference & diffraction Light as a ray Lecture
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
DD2426 Robotics and Autonomous Systems Lecture 4: Robot Sensors and Perception
 DD2426 Robotics and Autonomous Systems Lecture 4: Robot Sensors and Perception Patric Jensfelt Kungliga Tekniska Högskolan patric@kth.se April 8,2008 Example: Robots and sensors B21 (Real world interfaces)
DD2426 Robotics and Autonomous Systems Lecture 4: Robot Sensors and Perception Patric Jensfelt Kungliga Tekniska Högskolan patric@kth.se April 8,2008 Example: Robots and sensors B21 (Real world interfaces)
Lighting. To do. Course Outline. This Lecture. Continue to work on ray programming assignment Start thinking about final project
 To do Continue to work on ray programming assignment Start thinking about final project Lighting Course Outline 3D Graphics Pipeline Modeling (Creating 3D Geometry) Mesh; modeling; sampling; Interaction
To do Continue to work on ray programming assignment Start thinking about final project Lighting Course Outline 3D Graphics Pipeline Modeling (Creating 3D Geometry) Mesh; modeling; sampling; Interaction
Raytracing & Epsilon. Today. Last Time? Forward Ray Tracing. Does Ray Tracing Simulate Physics? Local Illumination
 Raytracing & Epsilon intersects light @ t = 25.2 intersects sphere1 @ t = -0.01 & Monte Carlo Ray Tracing intersects sphere1 @ t = 10.6 Solution: advance the ray start position epsilon distance along the
Raytracing & Epsilon intersects light @ t = 25.2 intersects sphere1 @ t = -0.01 & Monte Carlo Ray Tracing intersects sphere1 @ t = 10.6 Solution: advance the ray start position epsilon distance along the
26 Geometric Optics, Reflection
 26 Geometric Optics, Reflection We now turn to a branch of optics referred to as geometric optics and also referred to as ray optics. It applies in cases where the dimensions of the objects (and apertures)
26 Geometric Optics, Reflection We now turn to a branch of optics referred to as geometric optics and also referred to as ray optics. It applies in cases where the dimensions of the objects (and apertures)
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Roadmaps. Vertex Visibility Graph. Reduced visibility graph, i.e., not including segments that extend into obstacles on either side.
 Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Computational Geometry
 More on Voronoi diagrams 1 Can we move a disc from one location to another amidst obstacles? 2 Since the Voronoi diagram of point sites is locally furthest away from those sites, we can move the disc if
More on Voronoi diagrams 1 Can we move a disc from one location to another amidst obstacles? 2 Since the Voronoi diagram of point sites is locally furthest away from those sites, we can move the disc if
Distance-Optimal Navigation in an Unknown Environment without Sensing Distances
 SUBMITTED TO IEEE TRANSACTIONS ON ROBOTICS 1 Distance-Optimal Navigation in an Unknown Environment without Sensing Distances Benjamín Tovar, Rafael Murrieta-Cid, and Steven M. LaValle Abstract This paper
SUBMITTED TO IEEE TRANSACTIONS ON ROBOTICS 1 Distance-Optimal Navigation in an Unknown Environment without Sensing Distances Benjamín Tovar, Rafael Murrieta-Cid, and Steven M. LaValle Abstract This paper
Chapter 22. Reflection and Refraction of Light
 Chapter 22 Reflection and Refraction of Light Nature of Light Light has a dual nature. Particle Wave Wave characteristics will be discussed in this chapter. Reflection Refraction These characteristics
Chapter 22 Reflection and Refraction of Light Nature of Light Light has a dual nature. Particle Wave Wave characteristics will be discussed in this chapter. Reflection Refraction These characteristics
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
PY106 Class31. Index of refraction. Refraction. Index of refraction. Sample values of n. Rays and wavefronts. index of refraction: n v.
 Refraction Index of refraction When an EM wave travels in a vacuum, its speed is: c = 3.00 x 10 8 m/s. In any other medium, light generally travels at a slower speed. The speed of light v in a material
Refraction Index of refraction When an EM wave travels in a vacuum, its speed is: c = 3.00 x 10 8 m/s. In any other medium, light generally travels at a slower speed. The speed of light v in a material
CSE-571 Robotics. Sensors for Mobile Robots. Beam-based Sensor Model. Proximity Sensors. Probabilistic Sensor Models. Beam-based Scan-based Landmarks
 Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
f. (5.3.1) So, the higher frequency means the lower wavelength. Visible part of light spectrum covers the range of wavelengths from
 So, the higher frequency means the lower wavelength. Visible part of light spectrum covers the range of wavelengths from") Lecture 5-3 Interference and Diffraction of EM Waves During our previous lectures we have been talking about electromagnetic (EM) waves. As we know, harmonic waves of any type represent periodic process
Lecture 5-3 Interference and Diffraction of EM Waves During our previous lectures we have been talking about electromagnetic (EM) waves. As we know, harmonic waves of any type represent periodic process