EE565:Mobile Robotics Lecture 3
|
|
|
- Arline Brooks
- 6 years ago
- Views:
Transcription

1 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir
2 Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range finders Feature based sensor models Camera Laser scanner Kinect


3 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty?

4 Dynamic Bayesian Network for Controls, States, and Sensations
5 Probabilistic Motion Models To implement the Bayes Filter, we need the transition model p(x x, u). The term p(x x, u) specifies a posterior probability, that action u carries the robot from x to x. In this section we will specify, how p(x x, u) can be modeled based on the motion equations.
6 Coordinate Systems In general the configuration of a robot can be described by six parameters. Three-dimensional Cartesian coordinates plus three Euler angles pitch, roll, and tilt. Throughout this section, we consider robots operating on a planar surface. The state space of such systems is three-dimensional (x,y,).
7 Typical Motion Models In practice, one often finds two types of motion models: Odometry-based Velocity-based (dead reckoning) Odometry-based models are used when systems are equipped with wheel encoders. Velocity-based models have to be applied when no wheel encoders are given. They calculate the new pose based on the velocities and the time elapsed.
8 Dead Reckoning Derived from deduced reckoning. Mathematical procedure for determining the present location of a vehicle. Achieved by calculating the current pose of the vehicle based on its velocities and the time elapsed.
9 Reasons for Motion Errors ideal case different wheel diameters bump carpet and many more
 out of phase.")

10 Wheel Encoders A pair of encoders is used on a single shaft. The encoders are aligned so that their two data streams are one quarter cycle (90 deg.) out of phase. Which direction is shaft moving? Suppose the encoders were previously at the position highlighted by the dark band; i.e., Encoder A as 1 and Encoder B as 0. The next time the encoders are checked: If they moved to the position AB=00, the position count is incremented If they moved to the position AB=11, the position count is decremented
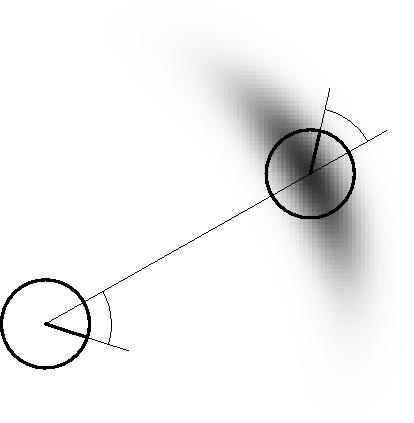
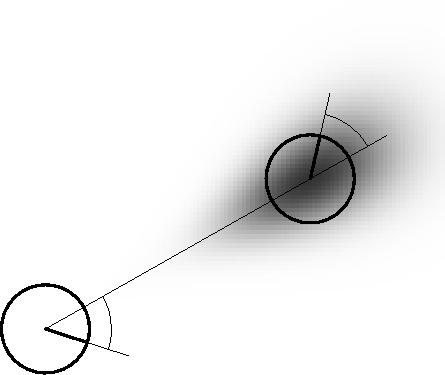
11 Odometry Model Robot moves from x, y, to x', y', ' Odometry information u.,, rot1 rot2 trans trans 2 ( x' x) ( y' y atan2( y' y, x' ) rot1 x rot2 ' rot1 ) 2 rot2 x', y', ' x, y, rot1 trans
12 The atan2 Function Extends the inverse tangent and correctly copes with the signs of x and y.
13 Noise Model for Odometry The measured motion is given by the true motion corrupted with noise. ˆ ˆ ˆ rot1 rot1 1 rot1 2 trans trans rot2 rot2 1 rot2 2 trans 3 trans 4 rot1 rot2 trans
14 Typical Distributions for Probabilistic Motion Models Normal distribution Triangular distribution 1 x ( x) e ( x) 0 if x x
15 How to Sample from Normal or Triangular Distributions? Sampling from a normal distribution 1. Algorithm sample_normal_distribution(b): 2. return Sampling from a triangular distribution 1. Algorithm sample_triangular_distribution(b): 2. return

16 Normally/Triangular Distributed Samples 10 6 samples
17 Calculating the Posterior Given x, x, and u 1. Algorithm motion_model_odometry(x,x,u) trans ( x' x) ( y' y) rot 1 atan2( y' y, x' x) rot2 ' rot1 ˆ 2 2 trans ( x' x) ( y' y) ˆ rot 1 atan2( y' y, x' x) ˆ ˆ rot2 ' rot 1 p prob( ˆ, ˆ rot1 rot1 1 rot1 p prob( ˆ, ˆ trans trans 3 p prob( ˆ, ˆ 1 ˆ 2 trans ) ( ˆ 4 rot1 ˆ ) 2 trans rot2 3 rot2 rot2 1 rot2 2 trans 11. return p 1 p 2 p 3 odometry values (u) values of interest (x,x ) ˆ ))

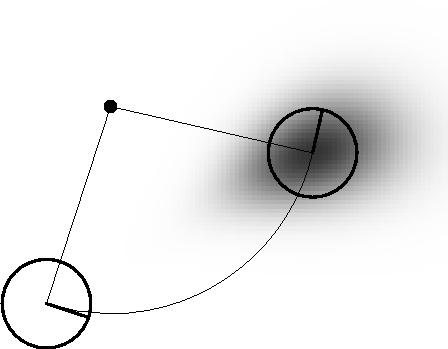
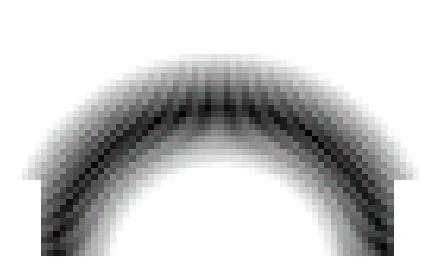
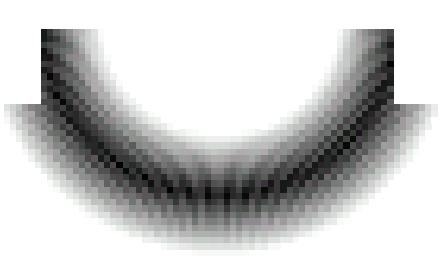
18 Application Repeated application of the sensor model for short movements. Typical banana-shaped distributions obtained for 2dprojection of 3d posterior. p(x u,x ) x u x u
19 Examples (Odometry-Based)
20 Velocity-Based Model
21 Posterior Probability for Velocity Model

22 Examples (velocity based)
23 Map-Consistent Motion Model p( x u, x') p( x u, x', m) Approximation: p( x u, x', m) p( x m) p( x u, x')
24 Sensors for Mobile Robots Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning mass, laser light) Compasses, inclinometers (earth magnetic field, gravity) Proximity sensors Sonar (time of flight) Radar (phase and frequency) Laser range-finders (triangulation, tof, phase) Infrared (intensity) Visual sensors: Cameras Satellite-based sensors: GPS
25 Proximity Sensors The central task is to determine P(z x), i.e., the probability of a measurement z given that the robot is at position x. Question: Where do the probabilities come from? Approach: Let s try to explain a measurement.
26 Beam-based Sensor Model Scan z consists of K measurements. z z, z,..., z } { 1 2 K Individual measurements are independent given the robot position. P( z x, m) K k1 P( z k x, m)
27 Beam-based Sensor Model P( z x, m) K k1 P( z k x, m)

28 Typical Measurement Errors of an Range Measurements 1. Beams reflected by obstacles 2. Beams reflected by persons / caused by crosstalk 3. Random measurements 4. Maximum range measurements
29 Proximity Measurement Measurement can be caused by a known obstacle. cross-talk. an unexpected obstacle (people, furniture, ). missing all obstacles (total reflection, glass, ). Noise is due to uncertainty in measuring distance to known obstacle. in position of known obstacles. in position of additional obstacles. whether obstacle is missed.
30 Beam-based Proximity Model Measurement noise Unexpected obstacles 0 z exp z max 0 z exp z max P hit ( z x, m) 1 2b e 1 ( zz 2 b 2 exp ) P unexp ( z x, m) e 0 z z z exp otherwise
31 Beam-based Proximity Model Random measurement Max range 0 z exp z max 0 z exp z max P rand ( z 1 x, m) z max P max ( z x, m) 1 z small
32 Resulting Mixture Density ), ( ), ( ), ( ), ( ), ( rand max unexp hit rand max unexp hit m x z P m x z P m x z P m x z P m x z P T How can we determine the model parameters?
33 Approximation Results Laser Sonar 300cm 400cm
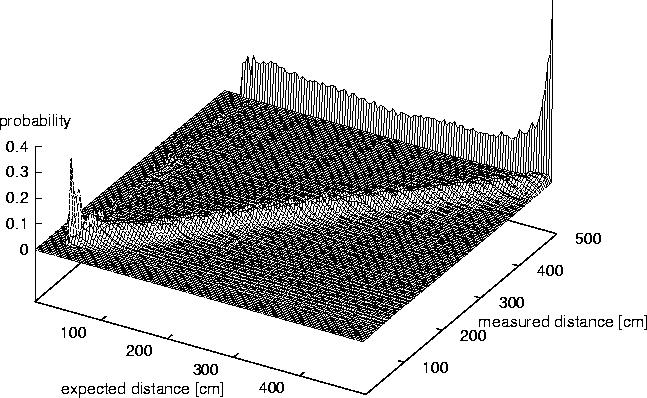
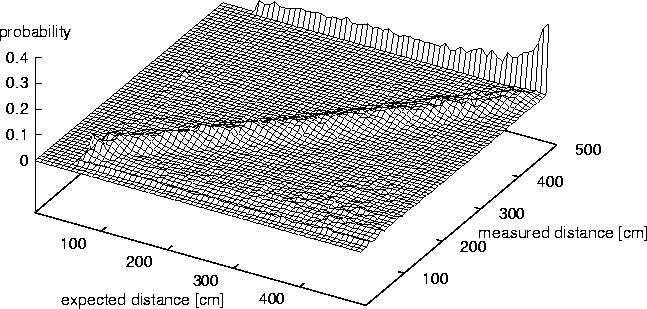
34 Approximation Results Laser Sonar
")
35 Example z P(z x,m)


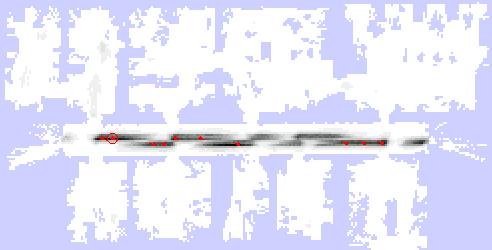
36 San Jose Tech Museum Occupancy grid map Likelihood field
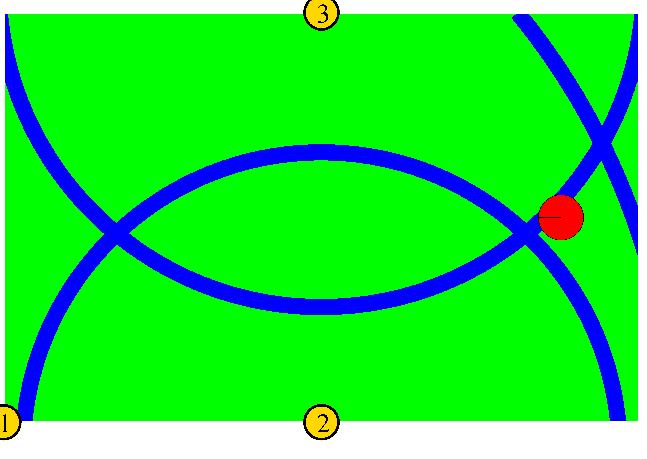
37 Landmarks Active beacons (e.g., radio, GPS) Passive (e.g., visual, retro-reflective) Standard approach is triangulation Sensor provides distance, or bearing, or distance and bearing.

38 Distance and Bearing
39 Probabilistic Model 2 2 ) ) ( ( ) ) ( ( ˆ y i m x i m d y x ), prob( ˆ ), prob( ˆ det d d d p,,,,, y x x d i z ) ) (, ) ( atan2( ˆ x i m y i m a x y ), uniform ( fp det det m x z P z p z
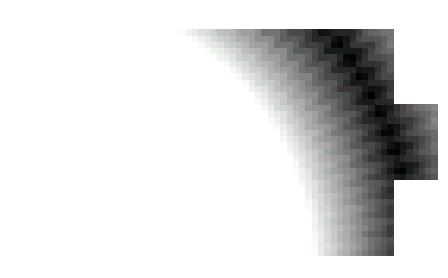

40 Distributions

41 Laser Scanner Features (Line) n n α = 1 2 atan2( 2 y y i x x i, i=0 i=0 r = x cos α + y sin α y y i 2 x x i 2 ) ρ cos θ α r = 0 P αr = σ α 2 σ αr σ rα σ r 2 σ α 2 = σ r 2 = σ αr = σ rα = n i=0 n i=0 n i=0 α ρ i r ρ i 2 2 σ2 ρi σ2 ρi α r ρ i ρ i 2 σ ρi 01 Feb 2016 Dr. -Ing. Ahmad Kamal Nasir
42 2D Geometric Feature based Map
 Transform the Calculate plane from R 3 to Hough space If local maxima is found in Hough space Delete points corresponding to plane from input points Calculate")
43 Kinect Features (Plane) p x sin θ cos φ + p y sin θ sin φ + p z cos θ = ρ Do until DetectedPlanes < 8 and TotalPoints > MinPoints Randomly select (P 1, P 2, P 3 ) from a random circular region Calculate plane from (P 1, P 2, P 3 ) Transform the Calculate plane from R 3 to Hough space If local maxima is found in Hough space Delete points corresponding to plane from input points Calculate plane boundries Reset Hough space End if End Do

44 3D Geometric Feature based Map
45 Summary of Sensor Models Explicitly modeling uncertainty in sensing is key to robustness. In many cases, good models can be found by the following approach: 1. Determine parametric model of noise free measurement. 2. Analyze sources of noise. 3. Add adequate noise to parameters (eventually mix in densities for noise). 4. Learn (and verify) parameters by fitting model to data. 5. Likelihood of measurement is given by probabilistically comparing the actual with the expected measurement. This holds for motion models as well. It is extremely important to be aware of the underlying assumptions!
46 Summary Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range finders Feature based sensor models Camera Laser scanner Kinect

47 Questions
CSE-571 Robotics. Sensors for Mobile Robots. Beam-based Sensor Model. Proximity Sensors. Probabilistic Sensor Models. Beam-based Scan-based Landmarks
 Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Introduction to Mobile Robotics Probabilistic Motion Models
 Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? Dynamic
Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? Dynamic
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
SLAM: Robotic Simultaneous Location and Mapping
 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Outline Sensors. EE Sensors. H.I. Bozma. Electric Electronic Engineering Bogazici University. December 13, 2017
 Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping
 Lecture#05 (Wednesday, September 12) Mapping") Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Motion Models (cont) 1 3/15/2018
 1 3/15/2018") Motion Models (cont) 1 3/15/018 Computing the Density to compute,, and use the appropriate probability density function; i.e., for zeromean Gaussian noise: 3/15/018 Sampling from the Velocity Motion Model
Motion Models (cont) 1 3/15/018 Computing the Density to compute,, and use the appropriate probability density function; i.e., for zeromean Gaussian noise: 3/15/018 Sampling from the Velocity Motion Model
E80. Experimental Engineering. Lecture 9 Inertial Measurement
 Lecture 9 Inertial Measurement http://www.volker-doormann.org/physics.htm Feb. 19, 2013 Christopher M. Clark Where is the rocket? Outline Sensors People Accelerometers Gyroscopes Representations State
Lecture 9 Inertial Measurement http://www.volker-doormann.org/physics.htm Feb. 19, 2013 Christopher M. Clark Where is the rocket? Outline Sensors People Accelerometers Gyroscopes Representations State
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
DD2426 Robotics and Autonomous Systems Lecture 4: Robot Sensors and Perception
 DD2426 Robotics and Autonomous Systems Lecture 4: Robot Sensors and Perception Patric Jensfelt Kungliga Tekniska Högskolan patric@kth.se April 8,2008 Example: Robots and sensors B21 (Real world interfaces)
DD2426 Robotics and Autonomous Systems Lecture 4: Robot Sensors and Perception Patric Jensfelt Kungliga Tekniska Högskolan patric@kth.se April 8,2008 Example: Robots and sensors B21 (Real world interfaces)
Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots
 Lecture#05 (Monday, January 26) Lecturer: Byron Boots") Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots Mapping 1 Occupancy Mapping When solving the localization problem, we had a map of the world and tried
Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots Mapping 1 Occupancy Mapping When solving the localization problem, we had a map of the world and tried
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps
 Lecture#06(Thursday September 11) Occupancy Maps") Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
MTRX4700: Experimental Robotics
 Stefan B. Williams April, 2013 MTR4700: Experimental Robotics Assignment 3 Note: This assignment contributes 10% towards your final mark. This assignment is due on Friday, May 10 th during Week 9 before
Stefan B. Williams April, 2013 MTR4700: Experimental Robotics Assignment 3 Note: This assignment contributes 10% towards your final mark. This assignment is due on Friday, May 10 th during Week 9 before
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Collaboration is encouraged among small groups (e.g., 2-3 students).
.") Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization. Wolfram Burgard
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Simon Parsons Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Simon Parsons Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
DEALING WITH SENSOR ERRORS IN SCAN MATCHING FOR SIMULTANEOUS LOCALIZATION AND MAPPING
 Inženýrská MECHANIKA, roč. 15, 2008, č. 5, s. 337 344 337 DEALING WITH SENSOR ERRORS IN SCAN MATCHING FOR SIMULTANEOUS LOCALIZATION AND MAPPING Jiří Krejsa, Stanislav Věchet* The paper presents Potential-Based
Inženýrská MECHANIKA, roč. 15, 2008, č. 5, s. 337 344 337 DEALING WITH SENSOR ERRORS IN SCAN MATCHING FOR SIMULTANEOUS LOCALIZATION AND MAPPING Jiří Krejsa, Stanislav Věchet* The paper presents Potential-Based
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
The Internet of Things: Roadmap to a Connected World. IoT and Localization
 IoT and Localization Daniela Rus Andrew (1956) and Erna Viterbi Prof., EECS Director, CSAIL Computer Science and Artificial Intelligence Laboratory (CSAIL) Massachusetts Institute of Technology 4x 4x
IoT and Localization Daniela Rus Andrew (1956) and Erna Viterbi Prof., EECS Director, CSAIL Computer Science and Artificial Intelligence Laboratory (CSAIL) Massachusetts Institute of Technology 4x 4x
ME 597/747 Autonomous Mobile Robots. Mid Term Exam. Duration: 2 hour Total Marks: 100
 ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
ROBOTICS AND AUTONOMOUS SYSTEMS
 ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 6 PERCEPTION/ODOMETRY comp329-2013-parsons-lect06 2/43 Today We ll talk about perception and
ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 6 PERCEPTION/ODOMETRY comp329-2013-parsons-lect06 2/43 Today We ll talk about perception and
Sensor Models / Occupancy Mapping / Density Mapping
 Statistical Techniques in Robotics (16-831, F09) Lecture #3 (09/01/2009) Sensor Models / Occupancy Mapping / Density Mapping Lecturer: Drew Bagnell Scribe: Mehmet R. Dogar 1 Sensor Models 1.1 Beam Model
Statistical Techniques in Robotics (16-831, F09) Lecture #3 (09/01/2009) Sensor Models / Occupancy Mapping / Density Mapping Lecturer: Drew Bagnell Scribe: Mehmet R. Dogar 1 Sensor Models 1.1 Beam Model
AUTONOMOUS SYSTEMS. LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping
 AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
Probabilistic Robotics
 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
CS283: Robotics Fall 2016: Sensors
 CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
Navigational Aids 1 st Semester/2007/TF 7:30 PM -9:00 PM
 Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture: Multi-Robot Motion Planning Prof. Yi Guo ECE Department Plan Introduction Premises and Problem Statement A Multi-Robot Motion Planning Algorithm Implementation
EE631 Cooperating Autonomous Mobile Robots Lecture: Multi-Robot Motion Planning Prof. Yi Guo ECE Department Plan Introduction Premises and Problem Statement A Multi-Robot Motion Planning Algorithm Implementation
Improving autonomous orchard vehicle trajectory tracking performance via slippage compensation
 Improving autonomous orchard vehicle trajectory tracking performance via slippage compensation Dr. Gokhan BAYAR Mechanical Engineering Department of Bulent Ecevit University Zonguldak, Turkey This study
Improving autonomous orchard vehicle trajectory tracking performance via slippage compensation Dr. Gokhan BAYAR Mechanical Engineering Department of Bulent Ecevit University Zonguldak, Turkey This study
Monte Carlo Localization using Dynamically Expanding Occupancy Grids. Karan M. Gupta
 1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING
 CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING By Michael Lowney Senior Thesis in Electrical Engineering University of Illinois at Urbana-Champaign Advisor: Professor Minh Do May 2015
CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING By Michael Lowney Senior Thesis in Electrical Engineering University of Illinois at Urbana-Champaign Advisor: Professor Minh Do May 2015
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM
 CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
Motion Models (cont) 1 2/17/2017
 1 2/17/2017") Motion Models (cont) 1 /17/017 Sampling from the Velocity Motion Model suppose that a robot has a map of its enironment and it needs to find its pose in the enironment this is the robot localization problem
Motion Models (cont) 1 /17/017 Sampling from the Velocity Motion Model suppose that a robot has a map of its enironment and it needs to find its pose in the enironment this is the robot localization problem
PATENT LIABILITY ANALYSIS. Daniel Barrett Sebastian Hening Sandunmalee Abeyratne Anthony Myers
 PATENT LIABILITY ANALYSIS Autonomous Targeting Vehicle (ATV) Daniel Barrett Sebastian Hening Sandunmalee Abeyratne Anthony Myers Autonomous wheeled vehicle with obstacle avoidance Two infrared range finder
PATENT LIABILITY ANALYSIS Autonomous Targeting Vehicle (ATV) Daniel Barrett Sebastian Hening Sandunmalee Abeyratne Anthony Myers Autonomous wheeled vehicle with obstacle avoidance Two infrared range finder
NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM
 NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM Jorma Selkäinaho, Aarne Halme and Janne Paanajärvi Automation Technology Laboratory, Helsinki University of Technology, Espoo,
NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM Jorma Selkäinaho, Aarne Halme and Janne Paanajärvi Automation Technology Laboratory, Helsinki University of Technology, Espoo,
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
7630 Autonomous Robotics Probabilities for Robotics
 7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Encoder applications. I Most common use case: Combination with motors
 3.5 Rotation / Motion - Encoder applications 64-424 Intelligent Robotics Encoder applications I Most common use case: Combination with motors I Used to measure relative rotation angle, rotational direction
3.5 Rotation / Motion - Encoder applications 64-424 Intelligent Robotics Encoder applications I Most common use case: Combination with motors I Used to measure relative rotation angle, rotational direction
ECGR4161/5196 Lecture 6 June 9, 2011
 ECGR4161/5196 Lecture 6 June 9, 2011 YouTube Videos: http://www.youtube.com/watch?v=7hag6zgj78o&feature=p layer_embedded Micro Robotics Worlds smallest robot - Version 1 - "tank" Worlds smallest robot
ECGR4161/5196 Lecture 6 June 9, 2011 YouTube Videos: http://www.youtube.com/watch?v=7hag6zgj78o&feature=p layer_embedded Micro Robotics Worlds smallest robot - Version 1 - "tank" Worlds smallest robot
Localization of Multiple Robots with Simple Sensors
 Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 2005 Localization of Multiple Robots with Simple Sensors Mike Peasgood and Christopher Clark Lab
Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 2005 Localization of Multiple Robots with Simple Sensors Mike Peasgood and Christopher Clark Lab
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Satellite Attitude Determination
 Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
Lecture 15: Segmentation (Edge Based, Hough Transform)
") Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Robotics. Haslum COMP3620/6320
 Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
ODOMETRY CORRECTION OF A MOBILE ROBOT USING A RANGE-FINDING LASER. A Thesis Presented to the Graduate School of Clemson University
 ODOMETRY CORRECTION OF A MOBILE ROBOT USING A RANGE-FINDING LASER A Thesis Presented to the Graduate School of Clemson University In Partial Fulfillment of the Requirements for the Degree Master of Science
ODOMETRY CORRECTION OF A MOBILE ROBOT USING A RANGE-FINDING LASER A Thesis Presented to the Graduate School of Clemson University In Partial Fulfillment of the Requirements for the Degree Master of Science
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Monte Carlo Localization
 Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Robust Monte-Carlo Localization using Adaptive Likelihood Models
 Robust Monte-Carlo Localization using Adaptive Likelihood Models Patrick Pfaff 1, Wolfram Burgard 1, and Dieter Fox 2 1 Department of Computer Science, University of Freiburg, Germany, {pfaff,burgard}@informatik.uni-freiburg.de
Robust Monte-Carlo Localization using Adaptive Likelihood Models Patrick Pfaff 1, Wolfram Burgard 1, and Dieter Fox 2 1 Department of Computer Science, University of Freiburg, Germany, {pfaff,burgard}@informatik.uni-freiburg.de
Pedestrian Detection Using Multi-layer LIDAR
 1 st International Conference on Transportation Infrastructure and Materials (ICTIM 2016) ISBN: 978-1-60595-367-0 Pedestrian Detection Using Multi-layer LIDAR Mingfang Zhang 1, Yuping Lu 2 and Tong Liu
1 st International Conference on Transportation Infrastructure and Materials (ICTIM 2016) ISBN: 978-1-60595-367-0 Pedestrian Detection Using Multi-layer LIDAR Mingfang Zhang 1, Yuping Lu 2 and Tong Liu
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Lecture 2. Reactive and Deliberative Intelligence and Behavior. Lecture Outline
 Lecture 2 6.141: Robotics Systems and Science Technical Lecture 2 Introduction to Robot Control Architectures and Sensing Lecture Notes Prepared by Una-May O Reilly CSAIL/MIT Spring 2010 You will learn
Lecture 2 6.141: Robotics Systems and Science Technical Lecture 2 Introduction to Robot Control Architectures and Sensing Lecture Notes Prepared by Una-May O Reilly CSAIL/MIT Spring 2010 You will learn
Multiple Model Estimation : The EM Algorithm & Applications
 Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Dec. 4, 2008 Harpreet S. Sawhney hsawhney@sarnoff.com Plan IBR / Rendering applications of motion / pose
Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Dec. 4, 2008 Harpreet S. Sawhney hsawhney@sarnoff.com Plan IBR / Rendering applications of motion / pose
Robotics (Kinematics) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Sensor technology for mobile robots
 Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
Particle Filter Tutorial. Carlos Esteves and Daphne Ippolito. Introduction. Prediction. Update. Resample. November 3, 2016
 November 3, 2016 Outline 1 2 3 4 Outline 1 2 3 4 The Following material is from Ioannis Rekleitis "A for Mobile Robot Localization" Outline 1 2 3 4 Motion model model motion step as rotation, followed
November 3, 2016 Outline 1 2 3 4 Outline 1 2 3 4 The Following material is from Ioannis Rekleitis "A for Mobile Robot Localization" Outline 1 2 3 4 Motion model model motion step as rotation, followed
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots
 Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Perception: Sensors. Autonomous Mobile Robots. Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart
 ASL Autonomous Systems Lab Perception: Sensors Autonomous Mobile Robots Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart Autonomous Mobile Robots Margarita Chli, Paul Furgale,
ASL Autonomous Systems Lab Perception: Sensors Autonomous Mobile Robots Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart Autonomous Mobile Robots Margarita Chli, Paul Furgale,
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
EE-565-Lab2. Dr. Ahmad Kamal Nasir
 EE-565-Lab2 Introduction to Simulation Environment Dr. Ahmad Kamal Nasir 29.01.2016 Dr. -Ing. Ahmad Kamal Nasir 1 Today s Objectives Introduction to Gazebo Building a robot model in Gazebo Populating robot
EE-565-Lab2 Introduction to Simulation Environment Dr. Ahmad Kamal Nasir 29.01.2016 Dr. -Ing. Ahmad Kamal Nasir 1 Today s Objectives Introduction to Gazebo Building a robot model in Gazebo Populating robot
Announcements. Recap Landmark based SLAM. Types of SLAM-Problems. Occupancy Grid Maps. Grid-based SLAM. Page 1. CS 287: Advanced Robotics Fall 2009
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
MAPPING ALGORITHM FOR AUTONOMOUS NAVIGATION OF LAWN MOWER USING SICK LASER
 MAPPING ALGORITHM FOR AUTONOMOUS NAVIGATION OF LAWN MOWER USING SICK LASER A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Engineering By SHASHIDHAR
MAPPING ALGORITHM FOR AUTONOMOUS NAVIGATION OF LAWN MOWER USING SICK LASER A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Engineering By SHASHIDHAR
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS. Oliver Wulf, Bernardo Wagner
 USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
3D scanning. 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects.
 Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Mobile Robots Locomotion & Sensors
 Mobile Robots Locomotion & Sensors Institute for Software Technology 1 Robotics is Easy control behavior perception modelling domain model environment model information extraction raw data planning task
Mobile Robots Locomotion & Sensors Institute for Software Technology 1 Robotics is Easy control behavior perception modelling domain model environment model information extraction raw data planning task
High Accuracy Navigation Using Laser Range Sensors in Outdoor Applications
 Proceedings of the 2000 IEEE International Conference on Robotics & Automation San Francisco, CA April 2000 High Accuracy Navigation Using Laser Range Sensors in Outdoor Applications Jose Guivant, Eduardo
Proceedings of the 2000 IEEE International Conference on Robotics & Automation San Francisco, CA April 2000 High Accuracy Navigation Using Laser Range Sensors in Outdoor Applications Jose Guivant, Eduardo
Markov Localization for Mobile Robots in Dynaic Environments
 Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
Mobile Robots: An Introduction.
 Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Localization, Mapping and Exploration with Multiple Robots. Dr. Daisy Tang
 Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
THE UNIVERSITY OF AUCKLAND
 THE UNIVERSITY OF AUCKLAND FIRST SEMESTER, 2002 Campus: Tamaki COMPUTER SCIENCE Intelligent Active Vision (Time allowed: TWO hours) NOTE: Attempt questions A, B, C, D, E, and F. This is an open book examination.
THE UNIVERSITY OF AUCKLAND FIRST SEMESTER, 2002 Campus: Tamaki COMPUTER SCIENCE Intelligent Active Vision (Time allowed: TWO hours) NOTE: Attempt questions A, B, C, D, E, and F. This is an open book examination.
DYNAMIC POSITIONING OF A MOBILE ROBOT USING A LASER-BASED GONIOMETER. Joaquim A. Batlle*, Josep Maria Font*, Josep Escoda**
 DYNAMIC POSITIONING OF A MOBILE ROBOT USING A LASER-BASED GONIOMETER Joaquim A. Batlle*, Josep Maria Font*, Josep Escoda** * Department of Mechanical Engineering Technical University of Catalonia (UPC)
DYNAMIC POSITIONING OF A MOBILE ROBOT USING A LASER-BASED GONIOMETER Joaquim A. Batlle*, Josep Maria Font*, Josep Escoda** * Department of Mechanical Engineering Technical University of Catalonia (UPC)
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Modeling, Parameter Estimation, and Navigation of Indoor Quadrotor Robots
 Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2013-04-29 Modeling, Parameter Estimation, and Navigation of Indoor Quadrotor Robots Stephen C. Quebe Brigham Young University
Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2013-04-29 Modeling, Parameter Estimation, and Navigation of Indoor Quadrotor Robots Stephen C. Quebe Brigham Young University