Motion Planning. Howie CHoset
|
|
|
- Virginia Miles
- 5 years ago
- Views:
Transcription
1 Motion Planning Howie CHoset
2 What is Motion Planning?


3 What is Motion Planning? Determining where to go
4 Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics
5 Algorithms Start-Goal Methods Map-Based Approaches Cellular Decompositions
6 The World consists of... Obstacles Already occupied spaces of the world In other words, robots can t go there Free Space Unoccupied space within the world Robots might be able to go here To determine where a robot can go, we need to discuss what a Configuration Space is
7 Motion Planning Statement If W denotes the robot s workspace, And C i denotes the i th obstacle, Then the robot s free space, FS, is defined as: And a path c FS = W - ( U C i ) C 0 is c : [0,1] g FS where c(0) is q start and c(1) is q goal
8 Example of a World (and Robot) Free Space Obstacles x,y Robot
9 What is a good path?
10 Basics: Metrics There are many different ways to measure a path: Time Distance traveled Expense Distance from obstacles Etc
11 Bug 1 But some computing power! known direction to goal otherwise local sensing walls/obstacles & encoders Bug 1 algorithm 1) head toward goal 2) if an obstacle is encountered, circumnavigate it and remember how close you get to the goal 3) return to that closest point (by wall-following) and continue Vladimir Lumelsky & Alexander Stepanov: Algorithmica 1987
12 Bug 1 But some computing power! known direction to goal otherwise local sensing walls/obstacles & encoders Bug 1 algorithm 1) head toward goal 2) if an obstacle is encountered, circumnavigate it and remember how close you get to the goal 3) return to that closest point (by wall-following) and continue Vladimir Lumelsky & Alexander Stepanov: Algorithmica 1987
 head toward goal 2) if an obstacle is encountered, circumnavigate it and remember how")
13 Bug 1 But some computing power! known direction to goal otherwise local sensing walls/obstacles & encoders Bug 1 algorithm 1) head toward goal 2) if an obstacle is encountered, circumnavigate it and remember how close you get to the goal 3) return to that closest point (by wall-following) and continue Vladimir Lumelsky & Alexander Stepanov: Algorithmica 1987
14 Bug2 Call the line from the starting point to the goal the m-line Bug 2 Algorithm
15 A better bug? Call the line from the starting point to the goal the m-line Bug 2 Algorithm 1) head toward goal on the m-line
16 A better bug? Call the line from the starting point to the goal the m-line Bug 2 Algorithm 1) head toward goal on the m-line 2) if an obstacle is in the way, follow it until you encounter the m-line again.
17 A better bug? m-line Bug 2 Algorithm 1) head toward goal on the m-line 2) if an obstacle is in the way, follow it until you encounter the m-line again. 3) Leave the obstacle and continue toward the goal OK?
18 A better bug? Bug 2 Algorithm 1) head toward goal on the m-line Start 2) if an obstacle is in the way, follow it until you encounter the m- line again. 3) Leave the obstacle and continue toward the goal Goal Better or worse than Bug1?
19 A better bug? Bug 2 Algorithm 1) head toward goal on the m-line Start 2) if an obstacle is in the way, follow it until you encounter the m-line again. 3) Leave the obstacle and continue toward the goal Goal NO! How do we fix this?
20 A better bug? Bug 2 Algorithm 1) head toward goal on the m-line Start 2) if an obstacle is in the way, follow it until you encounter the m- line again closer to the goal. 3) Leave the obstacle and continue toward the goal Goal
 head toward goal on the m-line 2) if an obstacle is in the way, follow it until you encounter the m-")
21 A better bug? Bug 2 Algorithm 1) head toward goal on the m-line 2) if an obstacle is in the way, follow it until you encounter the m- line again closer to the goal. 3) Leave the obstacle and continue toward the goal Better or worse than Bug1?
22 Start-Goal Algorithm: Lumelsky Bug Algorithms
23 Lumelsky Bug Algorithms Unknown obstacles, known start and goal. Simple bump sensors, encoders. Choose arbitrary direction to turn (left/right) to make all turns, called local direction Motion is like an ant walking around: In Bug 1 the robot goes all the way around each obstacle encountered, recording the point nearest the goal, then goes around again to leave the obstacle from that point In Bug 2 the robot goes around each obstacle encountered until it can continue on its previous path toward the goal
24 Assumptions?
25 Assumptions Size of robot Perfect sensing Perfect control Localization (heading) What else?
26 Example of a World (and Robot) Free Space Obstacles x,y Robot
27 Configuration Space: Accommodate Robot Size Free Space Obstacles x,y Robot (treat as point object)

28 Trace Boundary of Workspace Pick a reference point

29 Translate-only, non-circularly symmetric Pick a reference point

30 Translate-only, non-circularly symmetric Pick a reference point
31 The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world How to create it First abstract the robot as a point object. Then, enlarge the obstacles to account for the robot s footprint and degrees of freedom In our example, the robot was circular, so we simply enlarged our obstacles by the robot s radius (note the curved vertices)
32 Start-Goal Algorithm: Potential Functions
33 Attractive/Repulsive Potential Field U att is the attractive potential --- move to the goal U rep is the repulsive potential --- avoid obstacles
34 Artificial Potential Field Methods: Attractive Potential Quadratic Potential F att ( q) U k att goal ( q) ( q)
35 Distance R R R d 2 2 : ), ( y y x x b a b a b a d 2 2 ) ( ) ( ), ( y y x x b a b a b a d
36 Path Length Which is shortest?
37 Path Length Depends on metric
 D( q)")
38 Distance to Obstacle(s) D( q) min d ( q) i

39 The Repulsive Potential
40 Repulsive Potential
 U rep ( q) F( q) U ( q) +")
41 Total Potential Function U ( q) U att ( q) U rep ( q) F( q) U ( q) + =
42 Local Minimum Problem with the Charge Analogy
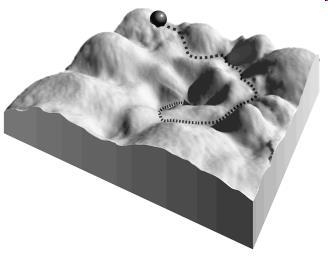
43 Local Min
44 The Wavefront Planner A common algorithm used to determine the shortest paths between two points In essence, a breadth first search of a graph For simplification, we ll present the world as a two-dimensional grid Setup: Label free space with 0 Label start as START Label the destination as 2
45 Representations World Representation You could always use a large region and distances However, a grid can be used for simplicity
46 Representations: A Grid Distance is reduced to discrete steps For simplicity, we ll assume distance is uniform Direction is now limited from one adjacent cell to another Time to revisit Connectivity (Remember Vision?)
47 Representations: Connectivity 8-Point Connectivity 4-Point Connectivity (approximation of the L1 metric)

48 The Wavefront Planner: Setup
49 The Wavefront in Action (Part 1) Starting with the goal, set all adjacent cells with 0 to the current cell Point Connectivity or 8-Point Connectivity? Your Choice. We ll use 8-Point Connectivity in our example
50 The Wavefront in Action (Part 2) Now repeat with the modified cells This will be repeated until no 0 s are adjacent to cells with values >= 2 0 s will only remain when regions are unreachable
51 The Wavefront in Action (Part 3) Repeat again...
52 The Wavefront in Action (Part 4) And again...
53 The Wavefront in Action (Part 5) And again until...
54 The Wavefront in Action (Done) You re done Remember, 0 s should only remain if unreachable regions exist

55 The Wavefront, Now What? To find the shortest path, according to your metric, simply always move toward a cell with a lower number The numbers generated by the Wavefront planner are roughly proportional to their distance from the goal Two possible shortest paths shown
56 Wavefront (Overview) Divide the space into a grid. Number the squares starting at the start in either 4 or 8 point connectivity starting at the goal, increasing till you reach the start. Your path is defined by any uninterrupted sequence of decreasing numbers that lead to the goal.
57 This is really a Continuous Solution Not pixels Waves bend L1 distance
58 Rapidly-Exploring Random Tree
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS
 Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Motion Planning, Part III Graph Search, Part I. Howie Choset
 Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Robotic Motion Planning: Bug Algorithms (with some discussion on curve tracing and sensors)
") Robotic Motion Planning: Bug Algorithms (with some discussion on curve tracing and sensors) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Robotic Motion Planning: Bug Algorithms (with some discussion on curve tracing and sensors) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Path Planning. Ioannis Rekleitis
 Path Planning Ioannis Rekleitis Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2 Mo+on Planning The ability to go from A to B
Path Planning Ioannis Rekleitis Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2 Mo+on Planning The ability to go from A to B
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.ceng.metu.edu.tr/~saranli/courses/ceng786 Lecture 2 Bug Algorithms Uluç Saranlı http://www.ceng.metu.edu.tr/~saranli CENG786 - Robot Motion Control and Planning
Robot Motion Control and Planning http://www.ceng.metu.edu.tr/~saranli/courses/ceng786 Lecture 2 Bug Algorithms Uluç Saranlı http://www.ceng.metu.edu.tr/~saranli CENG786 - Robot Motion Control and Planning
Robotic Motion Planning: Review C-Space and Start Potential Functions
 Robotic Motion Planning: Review C-Space and Start Potential Functions Robotics Institute 16-735 http://www.cs.cmu.edu/~motionplanning Howie Choset http://www.cs.cmu.edu/~choset What if the robot is not
Robotic Motion Planning: Review C-Space and Start Potential Functions Robotics Institute 16-735 http://www.cs.cmu.edu/~motionplanning Howie Choset http://www.cs.cmu.edu/~choset What if the robot is not
What s Special About Bugs
 Robotic Motion Planning: Bug Algorithms University of Denver ENCE 4800 Richard Voyles What s Special About Bugs Many planning algorithms assume global knowledge Bug algorithms assume only local knowledge
Robotic Motion Planning: Bug Algorithms University of Denver ENCE 4800 Richard Voyles What s Special About Bugs Many planning algorithms assume global knowledge Bug algorithms assume only local knowledge
Autonomous Mobile Robots, Chapter 6 Planning and Navigation Where am I going? How do I get there? Localization. Cognition. Real World Environment
 Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Robotic Motion Planning: Bug Algorithms
 Robotic Motion Planning: Bug Algorithms Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset What s Special About Bugs Many planning algorithms
Robotic Motion Planning: Bug Algorithms Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset What s Special About Bugs Many planning algorithms
Robotic Motion Planning: Bug Algorithms
 Robotic Motion Planning: Bug Algorithms Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset What s Special About Bugs Many planning algorithms
Robotic Motion Planning: Bug Algorithms Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset What s Special About Bugs Many planning algorithms
Roadmaps. Vertex Visibility Graph. Reduced visibility graph, i.e., not including segments that extend into obstacles on either side.
 Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Motion Planning, Part IV Graph Search Part II. Howie Choset
 Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Unit 5: Part 1 Planning
 Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Planning: Part 1 Classical Planning
 Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning
 6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Motion Planning III
 6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Dynamic Robot Path Planning Using Improved Max-Min Ant Colony Optimization
 Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 49 Dynamic Robot Path Planning Using Improved Max-Min Ant Colony
Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 49 Dynamic Robot Path Planning Using Improved Max-Min Ant Colony
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robotics Navigation I: Bug Algorithms
 Robotics Navigation I: Bug Algorithms Admin Any? Lab? Bug Algorithms Bug Algorithms Behavioral roboticists love(d) insects Simple behaviors easy to implement Complex emergent behaviors So first navigation
Robotics Navigation I: Bug Algorithms Admin Any? Lab? Bug Algorithms Bug Algorithms Behavioral roboticists love(d) insects Simple behaviors easy to implement Complex emergent behaviors So first navigation
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Cognitive Robotics Robot Motion Planning Matteo Matteucci
 Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Road Map Methods. Including material from Howie Choset / G.D. Hager S. Leonard
 Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Robotic Motion Planning: Cell Decompositions (with some discussion on coverage and pursuer/evader)
") Robotic Motion Planning: Cell Decompositions (with some discussion on coverage and pursuer/evader) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Robotic Motion Planning: Cell Decompositions (with some discussion on coverage and pursuer/evader) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
CS Path Planning
 Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
A Comparison of Robot Navigation Algorithms for an Unknown Goal
 A Comparison of Robot Navigation Algorithms for an Unknown Goal Russell Bayuk Steven Ratering (faculty mentor) Computer Science Department University of Wisconsin Eau Claire Eau Claire, WI 54702 {bayukrj,
A Comparison of Robot Navigation Algorithms for an Unknown Goal Russell Bayuk Steven Ratering (faculty mentor) Computer Science Department University of Wisconsin Eau Claire Eau Claire, WI 54702 {bayukrj,
Path Planning for Point Robots. NUS CS 5247 David Hsu
 Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning
 Part IV: Intelligent Machines and Robotics Planning") Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Metric Planning: Overview
 Also called quantitative planning Tries to find optimal path to goal Metric Planning: Overview As opposed to some path as per qualitative approach Usually plans path as series of subgoals (waypoints) Optimal/best
Also called quantitative planning Tries to find optimal path to goal Metric Planning: Overview As opposed to some path as per qualitative approach Usually plans path as series of subgoals (waypoints) Optimal/best
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs
 16-350 Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs Maxim Likhachev Robotics Institute 2D Planning for Omnidirectional Point Robot Planning for omnidirectional
16-350 Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs Maxim Likhachev Robotics Institute 2D Planning for Omnidirectional Point Robot Planning for omnidirectional
Motion Planning for a Point Robot (2/2) Point Robot on a Grid. Planning requires models. Point Robot on a Grid 1/18/2012.
 Point Robot on a Grid. Planning requires models. Point Robot on a Grid 1/18/2012.") Motion Planning for a Point Robot (/) Class scribing Position paper 1 Planning requires models Point Robot on a Grid The Bug algorithms are reactive motion strategies ; they are not motion planners To
Motion Planning for a Point Robot (/) Class scribing Position paper 1 Planning requires models Point Robot on a Grid The Bug algorithms are reactive motion strategies ; they are not motion planners To
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222)
") 2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Autonomous Robotics 6905
 6905 Lecture 5: to Path-Planning and Navigation Dalhousie University i October 7, 2011 1 Lecture Outline based on diagrams and lecture notes adapted from: Probabilistic bili i Robotics (Thrun, et. al.)
6905 Lecture 5: to Path-Planning and Navigation Dalhousie University i October 7, 2011 1 Lecture Outline based on diagrams and lecture notes adapted from: Probabilistic bili i Robotics (Thrun, et. al.)
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING
 MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
Robotic Motion Planning: A* and D* Search
 Robotic Motion Planning: A* and D* Search Robotics Institute 6-75 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset 6-75, Howie Choset with slides from G. Ayorker
Robotic Motion Planning: A* and D* Search Robotics Institute 6-75 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset 6-75, Howie Choset with slides from G. Ayorker
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Motion Planning for a Whole-Sensitive Robot Arm Manipulator*
 I \ "'/\ ~ I I r I L, (/1 Motion Planning for a Whole-Sensitive Robot Arm Manipulator* Edward Cheung and Vladimir Lumelsky Yale University, Department of Electrical Engineering New Haven, Connecticut 06520
I \ "'/\ ~ I I r I L, (/1 Motion Planning for a Whole-Sensitive Robot Arm Manipulator* Edward Cheung and Vladimir Lumelsky Yale University, Department of Electrical Engineering New Haven, Connecticut 06520
Potential Function. Homework #3. Part I: Star Algorithm
 Homework #3 Potential Function Part I: Star Algorithm I have implemented the Star Algorithm to compute the 2-dimensional configuration space Q starting from the workspace W and the robot shape R. The obstacles
Homework #3 Potential Function Part I: Star Algorithm I have implemented the Star Algorithm to compute the 2-dimensional configuration space Q starting from the workspace W and the robot shape R. The obstacles
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
Coverage. Ioannis Rekleitis
 Coverage Ioannis Rekleitis Motivation Humanitarian Demining CS-417 Introduction to Robotics and Intelligent Systems 2 Motivation Lawn Mowing CS-417 Introduction to Robotics and Intelligent Systems 3 Motivation
Coverage Ioannis Rekleitis Motivation Humanitarian Demining CS-417 Introduction to Robotics and Intelligent Systems 2 Motivation Lawn Mowing CS-417 Introduction to Robotics and Intelligent Systems 3 Motivation
Safe Prediction-Based Local Path Planning using Obstacle Probability Sections
 Slide 1 Safe Prediction-Based Local Path Planning using Obstacle Probability Sections Tanja Hebecker and Frank Ortmeier Chair of Software Engineering, Otto-von-Guericke University of Magdeburg, Germany
Slide 1 Safe Prediction-Based Local Path Planning using Obstacle Probability Sections Tanja Hebecker and Frank Ortmeier Chair of Software Engineering, Otto-von-Guericke University of Magdeburg, Germany
Coverage. Ioannis Rekleitis
 Coverage Ioannis Rekleitis Coverage A task performed quite often in everyday life: Cleaning Painting Plowing/Sowing Tile setting etc. CSCE 774: Robotic Systems 2 Motivation Humanitarian Demining CSCE 774:
Coverage Ioannis Rekleitis Coverage A task performed quite often in everyday life: Cleaning Painting Plowing/Sowing Tile setting etc. CSCE 774: Robotic Systems 2 Motivation Humanitarian Demining CSCE 774:
MOBILE ROBOTS NAVIGATION, MAPPING & LOCALIZATION: PART I
 MOBILE ROBOTS NAVIGATION, MAPPING & LOCALIZATION: PART I Lee Gim Hee* CML DSO National Laboratories 20 Science Park Drive Singapore 118230 Tel: (+65) 6796 8427 Email: lgimhee@dso.org.sg Marcelo H. Ang
MOBILE ROBOTS NAVIGATION, MAPPING & LOCALIZATION: PART I Lee Gim Hee* CML DSO National Laboratories 20 Science Park Drive Singapore 118230 Tel: (+65) 6796 8427 Email: lgimhee@dso.org.sg Marcelo H. Ang
Non-Homogeneous Swarms vs. MDP s A Comparison of Path Finding Under Uncertainty
 Non-Homogeneous Swarms vs. MDP s A Comparison of Path Finding Under Uncertainty Michael Comstock December 6, 2012 1 Introduction This paper presents a comparison of two different machine learning systems
Non-Homogeneous Swarms vs. MDP s A Comparison of Path Finding Under Uncertainty Michael Comstock December 6, 2012 1 Introduction This paper presents a comparison of two different machine learning systems
Path Planning. Jacky Baltes Dept. of Computer Science University of Manitoba 11/21/10
 Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Obstacle Avoidance (Local Path Planning)
") 6.2.2 Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
6.2.2 Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
COMPLETE AND SCALABLE MULTI-ROBOT PLANNING IN TUNNEL ENVIRONMENTS. Mike Peasgood John McPhee Christopher Clark
 COMPLETE AND SCALABLE MULTI-ROBOT PLANNING IN TUNNEL ENVIRONMENTS Mike Peasgood John McPhee Christopher Clark Lab for Intelligent and Autonomous Robotics, Department of Mechanical Engineering, University
COMPLETE AND SCALABLE MULTI-ROBOT PLANNING IN TUNNEL ENVIRONMENTS Mike Peasgood John McPhee Christopher Clark Lab for Intelligent and Autonomous Robotics, Department of Mechanical Engineering, University
MEM380 Applied Autonomous Robots Fall Depth First Search A* and Dijkstra s Algorithm
 MEM380 Applied Autonomous Robots Fall Breadth First Search Depth First Search A* and Dijkstra s Algorithm Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/ Instructor:
MEM380 Applied Autonomous Robots Fall Breadth First Search Depth First Search A* and Dijkstra s Algorithm Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/ Instructor:
Springer-Vcrlag New York Inc.
 S Algorithmica (1987) 2: 403-430 ~lgorithmica @ 1987 Springer-Vcrlag New York Inc. Path-Planning Strategies for a Point Mobile Automaton Moving Amidst Unknown Obstacles of Arbitrary Shape1 Vladimir J.
S Algorithmica (1987) 2: 403-430 ~lgorithmica @ 1987 Springer-Vcrlag New York Inc. Path-Planning Strategies for a Point Mobile Automaton Moving Amidst Unknown Obstacles of Arbitrary Shape1 Vladimir J.
Through the Looking Glass: Off-Line Versus On-Line Coverage of Planar Environments by a Battery Powered Autonomous Mobile Robot
 Through the Looking Glass: Off-Line Versus On-Line Coverage of Planar Environments by a Battery Powered Autonomous Mobile Robot Iddo Shnaps and Elon Rimon Dept. of ME, Technion, Israel Institute of Technology
Through the Looking Glass: Off-Line Versus On-Line Coverage of Planar Environments by a Battery Powered Autonomous Mobile Robot Iddo Shnaps and Elon Rimon Dept. of ME, Technion, Israel Institute of Technology
Obstacle Avoidance (Local Path Planning)
") Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Robot Motion Planning and (a little) Computational Geometry
 Computational Geometry") Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
Roadmap-Based Path Planning
 Roadmap-Based d Path Planning Chapter 7 Objectives Understand the definition of a Road Map Investigate techniques for roadmap-based goal- directed path planning in 2D environments geometry-based algorithms
Roadmap-Based d Path Planning Chapter 7 Objectives Understand the definition of a Road Map Investigate techniques for roadmap-based goal- directed path planning in 2D environments geometry-based algorithms
Visual Navigation for Flying Robots. Motion Planning
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Assignment 1: Control and obstacle avoidance
 Assignment 1: Control and obstacle avoidance ETH Zurich Individual Demonstration: Thursday, 08.10.2015 at 15:15 Individual Software Due: Thursday, 08.10.2015 at 23:00 Group Work Demonstration: Monday,
Assignment 1: Control and obstacle avoidance ETH Zurich Individual Demonstration: Thursday, 08.10.2015 at 15:15 Individual Software Due: Thursday, 08.10.2015 at 23:00 Group Work Demonstration: Monday,
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Chapter 23. Linear Motion Motion of a Bug
 Chapter 23 Linear Motion The simplest example of a parametrized curve arises when studying the motion of an object along a straight line in the plane We will start by studying this kind of motion when
Chapter 23 Linear Motion The simplest example of a parametrized curve arises when studying the motion of an object along a straight line in the plane We will start by studying this kind of motion when
Robot motion planning using exact cell decomposition and potential field methods
 Robot motion planning using exact cell decomposition and potential field methods DUŠAN GLAVAŠKI, MARIO VOLF, MIRJANA BONKOVIĆ Laboratory for Robotics and Intelligent Systems Faculty of Electrical Engineering,
Robot motion planning using exact cell decomposition and potential field methods DUŠAN GLAVAŠKI, MARIO VOLF, MIRJANA BONKOVIĆ Laboratory for Robotics and Intelligent Systems Faculty of Electrical Engineering,
Final Report: Dynamic Dubins-curve based RRT Motion Planning for Differential Constrain Robot
 Final Report: Dynamic Dubins-curve based RRT Motion Planning for Differential Constrain Robot Abstract This project develops a sample-based motion-planning algorithm for robot with differential constraints.
Final Report: Dynamic Dubins-curve based RRT Motion Planning for Differential Constrain Robot Abstract This project develops a sample-based motion-planning algorithm for robot with differential constraints.
Manipula0on Algorithms Mo0on Planning. Mo#on Planning I. Katharina Muelling (NREC, Carnegie Mellon University) 1
 1") 16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
Improving Robot Path Planning Efficiency with Probabilistic Virtual Environment Models
 VECIMS 2004 - IEEE International Conference on Virtual Environments, Human-Computer Interfaces, and Measurement Systems Boston, MA, USA, 12-14 July 2004 Improving Robot Path Planning Efficiency with Probabilistic
VECIMS 2004 - IEEE International Conference on Virtual Environments, Human-Computer Interfaces, and Measurement Systems Boston, MA, USA, 12-14 July 2004 Improving Robot Path Planning Efficiency with Probabilistic
UNIVERSITY OF NORTH CAROLINA AT CHARLOTTE
 UNIVERSITY OF NORTH CAROLINA AT CHARLOTTE Department of Electrical and Computer Engineering ECGR 4161/5196 Introduction to Robotics Experiment No. 5 A* Path Planning Overview: The purpose of this experiment
UNIVERSITY OF NORTH CAROLINA AT CHARLOTTE Department of Electrical and Computer Engineering ECGR 4161/5196 Introduction to Robotics Experiment No. 5 A* Path Planning Overview: The purpose of this experiment
Robotics: Science and Systems I Lab 6: Motion Planning and Global Navigation Begins: 3/5/2014, 3pm Due: 3/12/2014, 3pm
 Objectives and Lab Overview Massachusetts Institute of Technology Robotics: Science and Systems I Lab 6: Motion Planning and Global Navigation Begins: 3/5/2014, 3pm Due: 3/12/2014, 3pm Your objective in
Objectives and Lab Overview Massachusetts Institute of Technology Robotics: Science and Systems I Lab 6: Motion Planning and Global Navigation Begins: 3/5/2014, 3pm Due: 3/12/2014, 3pm Your objective in
The Drunken Sailor s Challenge
 The Drunken Sailor s Challenge CS7001 mini-project by Arya Irani with Tucker Balch September 29, 2003 Introduction The idea [1] is to design an agent to navigate a two-dimensional field of obstacles given
The Drunken Sailor s Challenge CS7001 mini-project by Arya Irani with Tucker Balch September 29, 2003 Introduction The idea [1] is to design an agent to navigate a two-dimensional field of obstacles given
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Divided-and-Conquer for Voronoi Diagrams Revisited. Supervisor: Ben Galehouse Presenter: Xiaoqi Cao
 Divided-and-Conquer for Voronoi Diagrams Revisited Supervisor: Ben Galehouse Presenter: Xiaoqi Cao Outline Introduction Generalized Voronoi Diagram Algorithm for building generalized Voronoi Diagram Applications
Divided-and-Conquer for Voronoi Diagrams Revisited Supervisor: Ben Galehouse Presenter: Xiaoqi Cao Outline Introduction Generalized Voronoi Diagram Algorithm for building generalized Voronoi Diagram Applications
Heuristic Search and Advanced Methods
 Heuristic Search and Advanced Methods Computer Science cpsc322, Lecture 3 (Textbook Chpt 3.6 3.7) May, 15, 2012 CPSC 322, Lecture 3 Slide 1 Course Announcements Posted on WebCT Assignment1 (due on Thurs!)
Heuristic Search and Advanced Methods Computer Science cpsc322, Lecture 3 (Textbook Chpt 3.6 3.7) May, 15, 2012 CPSC 322, Lecture 3 Slide 1 Course Announcements Posted on WebCT Assignment1 (due on Thurs!)
Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences
 Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences : A rule of thumb, simplification, or educated guess that reduces
Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences : A rule of thumb, simplification, or educated guess that reduces
Navigation and Metric Path Planning
 Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Discrete Motion Planning
 RBE MOTION PLANNING Discrete Motion Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Homework 1 is out Due Date - Feb 1 Updated
RBE MOTION PLANNING Discrete Motion Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Homework 1 is out Due Date - Feb 1 Updated
SLAMWARE. RoboStudio. User Manual. Shanghai Slamtec.Co.,Ltd rev.1.1
 www.slamtec.com 2017-11-06 rev.1.1 SLAMWARE RoboStudio User Manual Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3 USER GUIDE... 4 OFFLINE/ONLINE MODE... 4 CONNECT/DISCONNECT ROBOT...
www.slamtec.com 2017-11-06 rev.1.1 SLAMWARE RoboStudio User Manual Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3 USER GUIDE... 4 OFFLINE/ONLINE MODE... 4 CONNECT/DISCONNECT ROBOT...
Approximate path planning. Computational Geometry csci3250 Laura Toma Bowdoin College
 Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Announcements. CS 188: Artificial Intelligence Fall Robot motion planning! Today. Robotics Tasks. Mobile Robots
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Safe Navigation of Mobile Robot Using A* Algorithm
 Safe Navigation of Mobile Robot Using A* Algorithm Hasan Mujtaba Assistant Professor, Electronics & Communication Engineering Department, Ganeshi Lal Bajaj Institute of Technology & Management, Greater
Safe Navigation of Mobile Robot Using A* Algorithm Hasan Mujtaba Assistant Professor, Electronics & Communication Engineering Department, Ganeshi Lal Bajaj Institute of Technology & Management, Greater
Homework 4: (GRADUATE VERSION)
") Homework 4: Wavefront Path Planning and Path Smoothing (GRADUATE VERSION) Assigned: Thursday, October 16, 2008 Due: Friday, October 31, 2008 at 23:59:59 In this assignment, you will write a path planner
Homework 4: Wavefront Path Planning and Path Smoothing (GRADUATE VERSION) Assigned: Thursday, October 16, 2008 Due: Friday, October 31, 2008 at 23:59:59 In this assignment, you will write a path planner
Discrete search algorithms
 Robot Autonomy (16-662, S13) Lecture#08 (Monday February 11) Discrete search algorithms Lecturer: Siddhartha Srinivasa Scribes: Kavya Suresh & David Matten I. INTRODUCTION These notes contain a detailed
Robot Autonomy (16-662, S13) Lecture#08 (Monday February 11) Discrete search algorithms Lecturer: Siddhartha Srinivasa Scribes: Kavya Suresh & David Matten I. INTRODUCTION These notes contain a detailed
MRBUG: A Competitive Multi-Robot Path Finding Algorithm
 MBUG: A Competitive Multi- Path Finding Algorithm Shahar Sarid, Amir Shapiro and Yoav Gabriely Abstract We explore an on-line problem where a group of robots has to reach a target whose position is known
MBUG: A Competitive Multi- Path Finding Algorithm Shahar Sarid, Amir Shapiro and Yoav Gabriely Abstract We explore an on-line problem where a group of robots has to reach a target whose position is known
Formal Verification of 800 Genetically Constructed Automata Programs: A Case Study
 Formal Verification of 800 Genetically Constructed Automata Programs: A Case Study Mikhail Lukin, Maxim Buzdalov, and Anatoly Shalyto ITMO University 49 Kronverkskiy prosp. Saint-Petersburg, Russia, 197101
Formal Verification of 800 Genetically Constructed Automata Programs: A Case Study Mikhail Lukin, Maxim Buzdalov, and Anatoly Shalyto ITMO University 49 Kronverkskiy prosp. Saint-Petersburg, Russia, 197101
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization
 Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Gaussian Processes for Robotics. McGill COMP 765 Oct 24 th, 2017
 Gaussian Processes for Robotics McGill COMP 765 Oct 24 th, 2017 A robot must learn Modeling the environment is sometimes an end goal: Space exploration Disaster recovery Environmental monitoring Other
Gaussian Processes for Robotics McGill COMP 765 Oct 24 th, 2017 A robot must learn Modeling the environment is sometimes an end goal: Space exploration Disaster recovery Environmental monitoring Other
Manipulator trajectory planning
 Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis
 Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Motion Planning 1 Retraction and Cell Decomposition
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires